


Long Lead ENSO Forecast Using an Adaptive Graph Convolutional Recurrent Neural Network †


Abstract
1. Introduction
2. Literature Review
2.1. Dynamical Methods
2.2. Statistical Methods
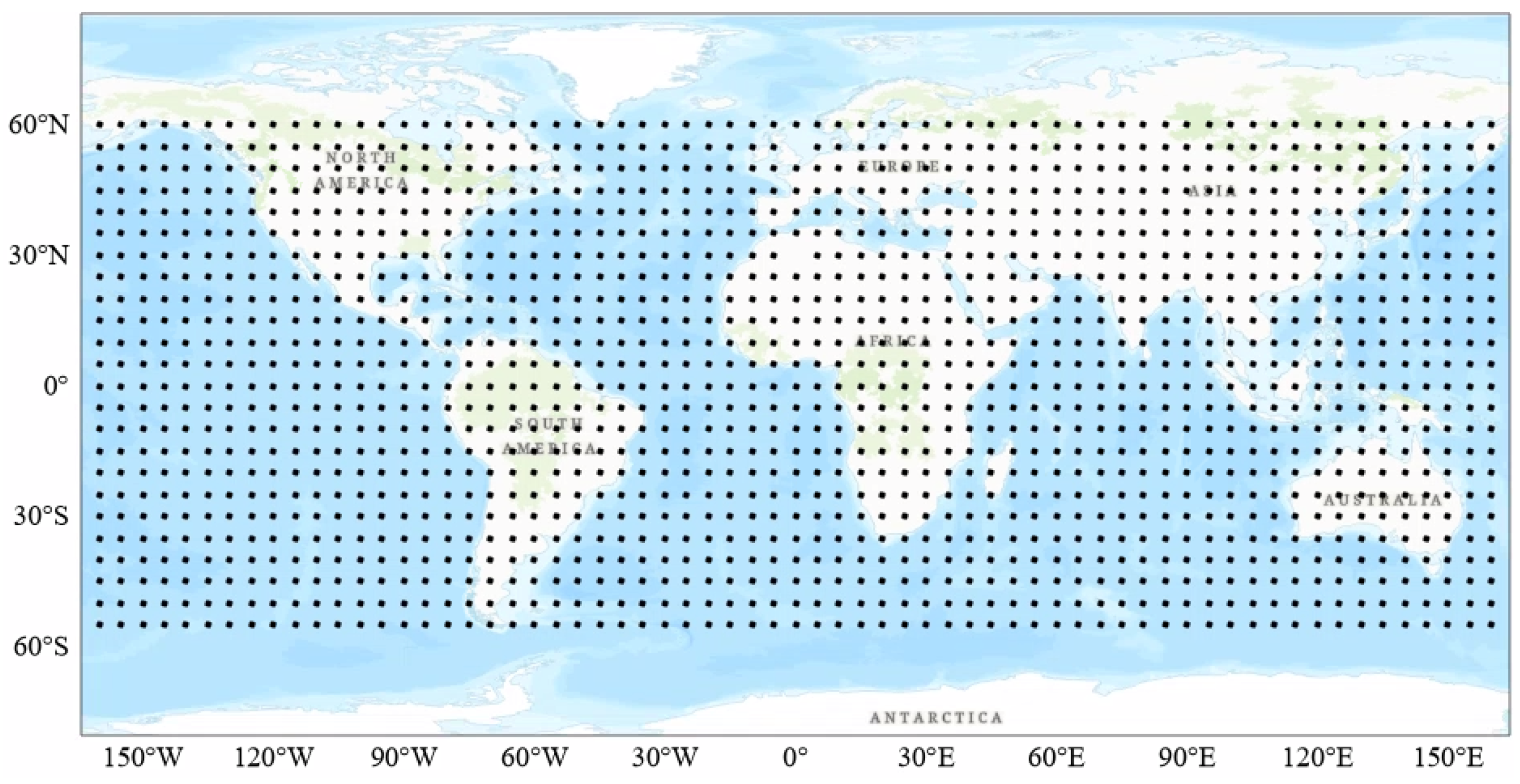
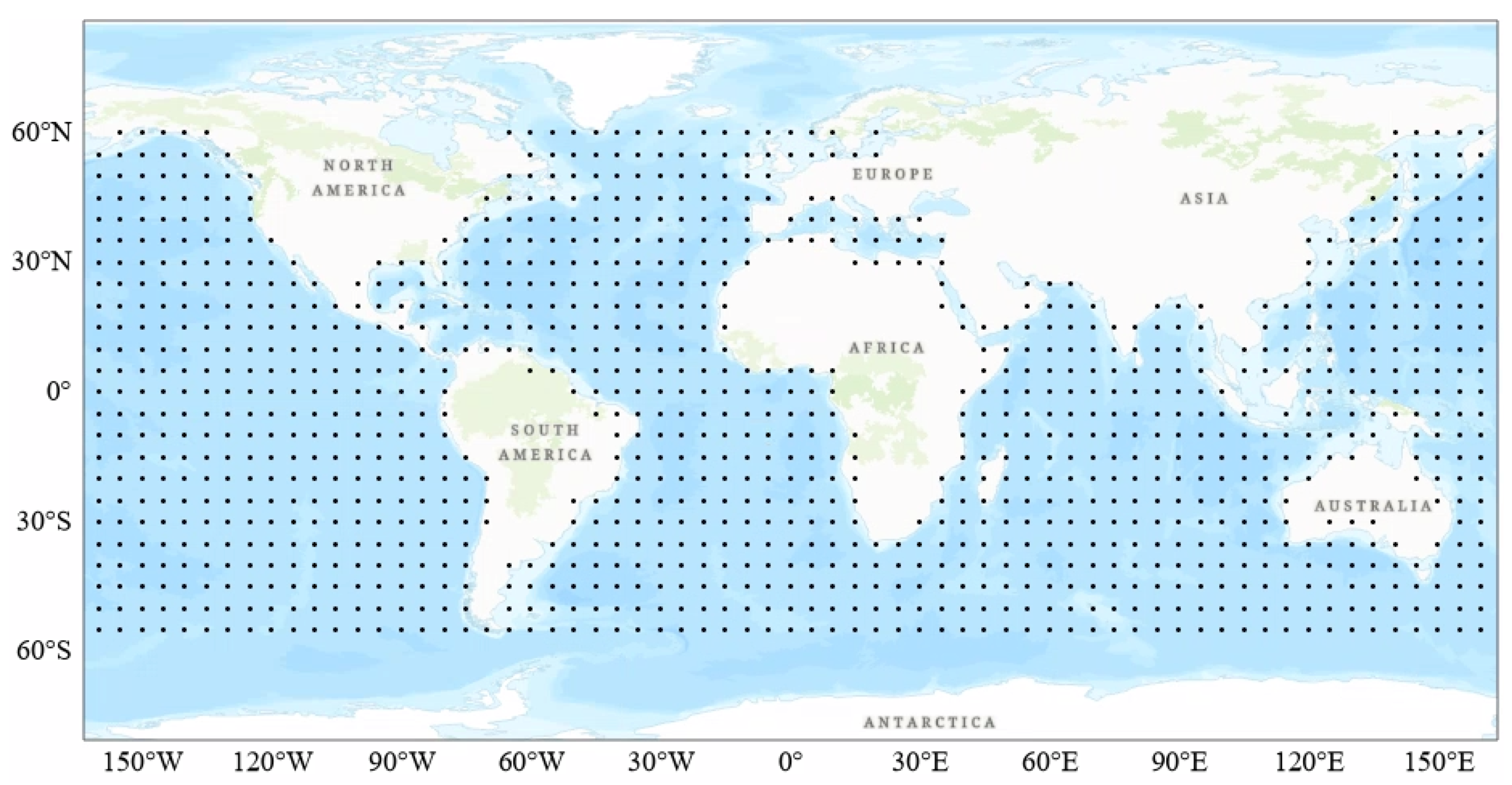
3. Data Description
4. Methodology
4.1. Problem Statement
4.2. Graph Learning Module (GLM)
4.3. AGCRNN
4.4. Implementation Details
4.5. Model Evaluation
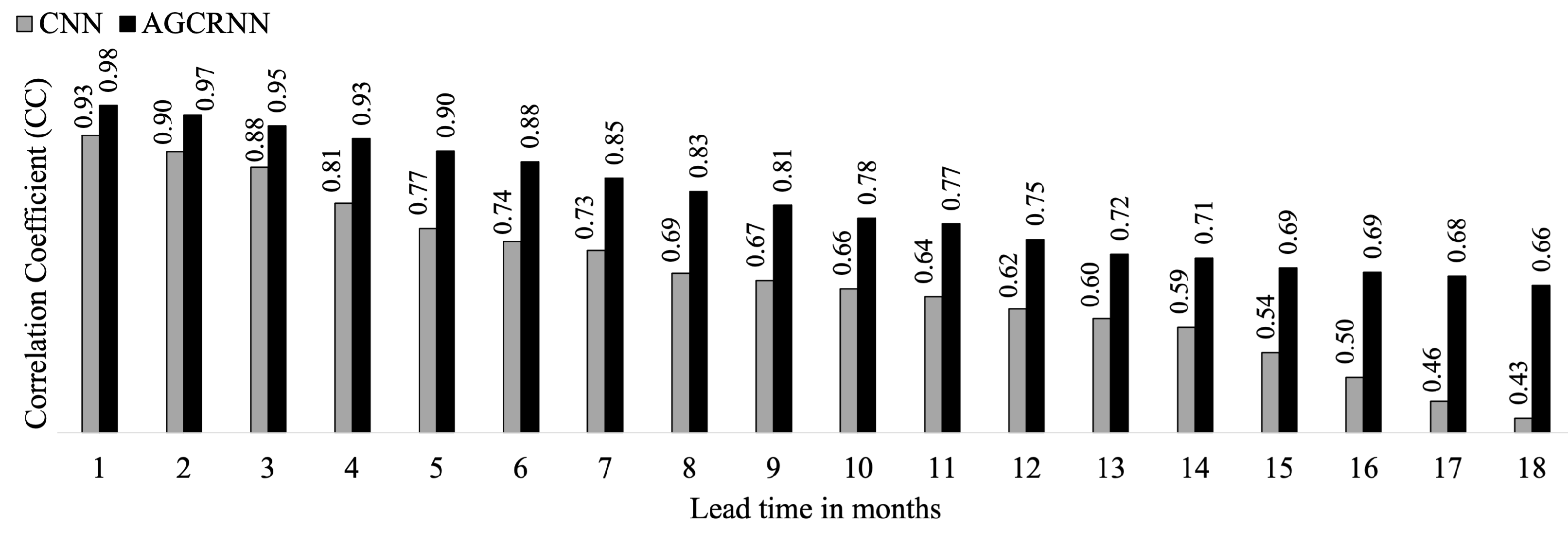
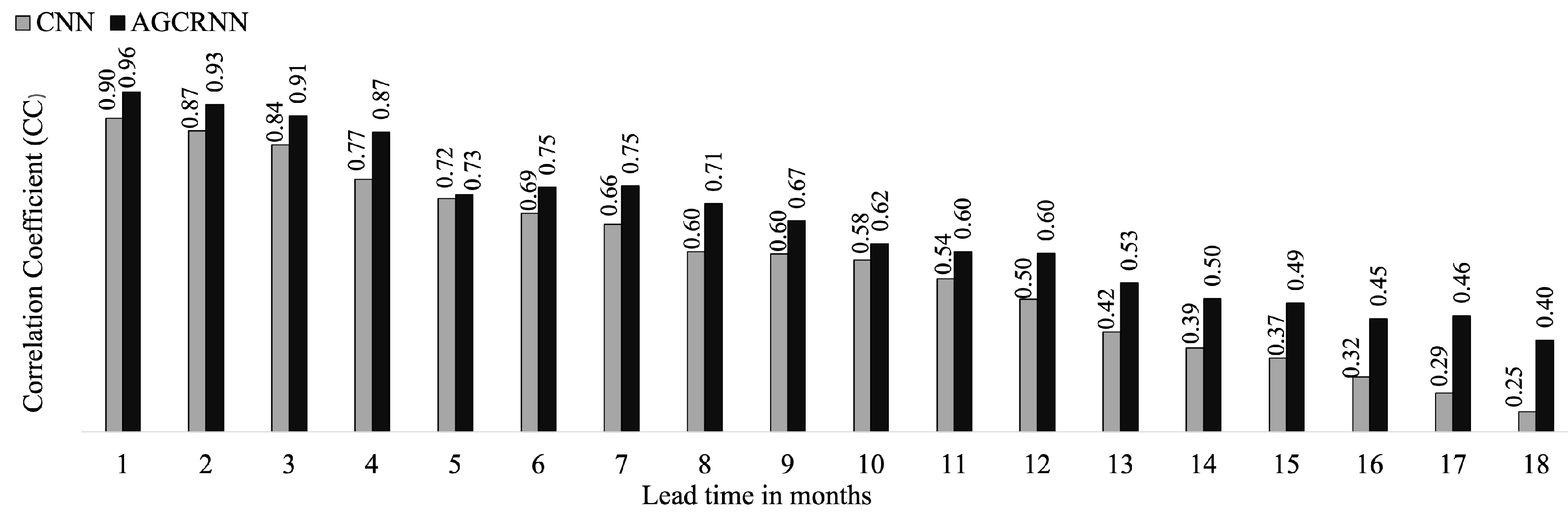
5. Results and Discussion
5.1. CMIP5 Dataset
5.2. SODA Dataset
5.3. GODAS Dataset
6. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hardiman, S.C.; Dunstone, N.J.; Scaife, A.A.; Smith, D.M.; Ineson, S.; Lim, J.; Fereday, D. The impact of strong El Niño and La Niña events on the North Atlantic. Geophys. Res. Lett. 2019, 46, 2874–2883. [Google Scholar] [CrossRef]
- Bjerknes, J. Atmospheric teleconnections from the equatorial Pacific. Mon. Weather. Rev. 1969, 97, 163–172. [Google Scholar] [CrossRef]
- Cai, W.; Van Rensch, P.; Cowan, T.; Sullivan, A. Asymmetry in ENSO teleconnection with regional rainfall, its multidecadal variability, and impact. J. Clim. 2010, 23, 4944–4955. [Google Scholar] [CrossRef]
- Yu, J.Y.; Fang, S.W. The distinct contributions of the seasonal footprinting and charged-discharged mechanisms to ENSO complexity. Geophys. Res. Lett. 2018, 45, 6611–6618. [Google Scholar] [CrossRef]
- McPhaden, M.J.; Zhang, X. Asymmetry in zonal phase propagation of ENSO sea surface temperature anomalies. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Cole, J.E.; Overpeck, J.T.; Cook, E.R. Multiyear La Niña events and persistent drought in the contiguous United States. Geophys. Res. Lett. 2003, 29, 25-1–25-4. [Google Scholar] [CrossRef]
- Hashemi, M.; Karimi, H. Weighted machine learning. Stat. Optim. Inf. Comput. 2018, 6, 497–525. [Google Scholar] [CrossRef]
- Hashemi, M.; Karimi, H.A. Weighted machine learning for spatial-temporal data. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2020, 13, 3066–3082. [Google Scholar] [CrossRef]
- Hashemi, M.; Alesheikh, A.A.; Zolfaghari, M.R. A spatio-temporal model for probabilistic seismic hazard zonation of Tehran. Comput. Geosci. 2013, 58, 8–18. [Google Scholar] [CrossRef]
- Hashemi, M.; Alesheikh, A.A.; Zolfaghari, M.R. A GIS-based time-dependent seismic source modeling of Northern Iran. Earthq. Eng. Eng. Vib. 2017, 16, 33–45. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, H.; Jiang, H.; Ma, W. Evaluation of ENSO prediction skill changes since 2000 based on multimodel hindcasts. Atmosphere 2021, 12, 365. [Google Scholar] [CrossRef]
- Saha, S.; Moorthi, S.; Wu, X.; Wang, J.; Nadiga, S.; Tripp, P.; Behringer, D.; Hou, Y.T.; Chuang, H.Y.; Iredell, M.; et al. The NCEP climate forecast system version 2. J. Clim. 2014, 27, 2185–2208. [Google Scholar] [CrossRef]
- Lima, C.H.; Lall, U.; Jebara, T.; Barnston, A.G. Machine learning methods for ENSO analysis and prediction. In Machine Learning and Data Mining Approaches to Climate Science: Proceedings of the 4th International Workshop on Climate Informatics, Boulder, CO, USA, 25–26 September 2014; Springer: Cham, Switzerland, 2015; pp. 13–21. [Google Scholar]
- Pal, M.; Maity, R.; Ratnam, J.V.; Nonaka, M.; Behera, S.K. Long-lead prediction of ENSO modoki index using machine learning algorithms. Sci. Rep. 2020, 10, 365. [Google Scholar] [CrossRef]
- Aguilar-Martinez, S.; Hsieh, W.W. Forecasts of tropical Pacific sea surface temperatures by neural networks and support vector regression. Int. J. Oceanogr. 2009, 2009, 167239. [Google Scholar] [CrossRef]
- Silva, K.A.; de Souza Rolim, G.; de Oliveira Aparecido, L.E. Forecasting El Niño and La Niña events using decision tree classifier. Theor. Appl. Climatol. 2022, 148, 1279–1288. [Google Scholar] [CrossRef]
- Maher, N.; Tabarin, T.P.; Milinski, S. Combining machine learning and SMILEs to classify, better understand, and project changes in ENSO events. Earth Syst. Dyn. 2022, 13, 1289–1304. [Google Scholar] [CrossRef]
- Dijkstra, H.A.; Petersik, P.; Hernández-García, E.; López, C. The application of machine learning techniques to improve El Niño prediction skill. Front. Phys. 2019, 7, 153. [Google Scholar] [CrossRef]
- Baawain, M.S.; Nour, M.H.; El-Din, A.G.; El-Din, M.G. El Niño southern-oscillation prediction using southern oscillation index and Niño3 as onset indicators: Application of artificial neural networks. J. Environ. Eng. Sci. 2005, 4, 113–121. [Google Scholar] [CrossRef]
- Tangang, F.T.; Hsieh, W.W.; Tang, B. Forecasting regional sea surface temperatures in the tropical Pacific by neural network models, with wind stress and sea level pressure as predictors. J. Geophys. Res. Ocean. 1998, 103, 7511–7522. [Google Scholar] [CrossRef]
- Nooteboom, P.D.; Feng, Q.Y.; López, C.; Hernández-García, E.; Dijkstra, H.A. Using network theory and machine learning to predict El Niño. Earth Syst. Dyn. 2018, 9, 969–983. [Google Scholar] [CrossRef]
- Ham, Y.G.; Kim, J.H.; Luo, J.J. Deep learning for multi-year ENSO forecasts. Nature 2019, 573, 568–572. [Google Scholar] [CrossRef] [PubMed]
- Ham, Y.G.; Kim, J.H.; Kim, E.S.; On, K.W. Unified deep learning model for El Niño/Southern Oscillation forecasts by incorporating seasonality in climate data. Sci. Bull. 2021, 66, 1358–1366. [Google Scholar] [CrossRef] [PubMed]
- Hashemi, M. Forecasting El Nino and La Nina Using Spatially and Temporally Structured Predictors and A Convolutional Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 3438–3446. [Google Scholar] [CrossRef]
- Broni-Bedaiko, C.; Katsriku, F.A.; Unemi, T.; Atsumi, M.; Abdulai, J.D.; Shinomiya, N.; Owusu, E. El Niño-Southern Oscillation forecasting using complex networks analysis of LSTM neural networks. Artif. Life Robot. 2019, 24, 445–451. [Google Scholar] [CrossRef]
- Jonnalagadda, J.; Hashemi, M. Spatial-Temporal Forecast of the probability distribution of Oceanic Niño Index for various lead times. In Proceedings of the 33rd International Conference on Software Engineering and Knowledge Engineering, Virtual, 1–10 July 2021; p. 309. [Google Scholar]
- Jonnalagadda, J.; Hashemi, M. Feature Selection and Spatial-Temporal Forecast of Oceanic Nino Index Using Deep Learning. Int. J. Softw. Eng. Knowl. Eng. 2022, 32, 91–107. [Google Scholar] [CrossRef]
- Geng, H.; Wang, T. Spatiotemporal model based on deep learning for ENSO forecasts. Atmosphere 2021, 12, 810. [Google Scholar] [CrossRef]
- Nielsen, A.H.; Iosifidis, A.; Karstoft, H. Forecasting large-scale circulation regimes using deformable convolutional neural networks and global spatiotemporal climate data. Sci. Rep. 2022, 12, 8395. [Google Scholar] [CrossRef]
- Hu, J.; Weng, B.; Huang, T.; Gao, J.; Ye, F.; You, L. Deep residual convolutional neural network combining dropout and transfer learning for ENSO forecasting. Geophys. Res. Lett. 2021, 48, e2021GL093531. [Google Scholar] [CrossRef]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. Adv. Neural Inf. Process. Syst. 2016, 29, 3844–3852. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lead Time in Months | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Model | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| CNN | 0.86 | 0.81 | 0.79 | 0.70 | 0.65 | 0.61 | 0.55 | 0.53 | 0.51 |
| AGCRNN | 0.97 | 0.93 | 0.90 | 0.85 | 0.81 | 0.78 | 0.73 | 0.69 | 0.65 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | |
| CNN | 0.46 | 0.42 | 0.41 | 0.37 | 0.33 | 0.32 | 0.30 | 0.25 | 0.21 |
| AGCRNN | 0.61 | 0.58 | 0.55 | 0.50 | 0.49 | 0.48 | 0.47 | 0.45 | 0.42 |
| Lead Time in Months | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Model | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| CNN | 0.72 | 0.64 | 0.60 | 0.55 | 0.47 | 0.42 | 0.41 | 0.45 | 0.42 |
| AGCRNN | 0.81 | 0.67 | 0.65 | 0.67 | 0.51 | 0.55 | 0.48 | 0.46 | 0.43 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | |
| CNN | 0.36 | 0.34 | 0.28 | 0.18 | 0.18 | 0.17 | 0.15 | 0.16 | 0.09 |
| AGCRNN | 0.38 | 0.36 | 0.32 | 0.19 | 0.20 | 0.19 | 0.18 | 0.19 | 0.12 |
| Lead Time in Months | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Model | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| CNN | 0.92 | 0.89 | 0.83 | 0.76 | 0.71 | 0.67 | 0.63 | 0.59 | 0.55 |
| AGCRNN | 0.94 | 0.90 | 0.86 | 0.82 | 0.78 | 0.73 | 0.69 | 0.66 | 0.63 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | |
| CNN | 0.52 | 0.48 | 0.46 | 0.43 | 0.38 | 0.36 | 0.35 | 0.31 | 0.28 |
| AGCRNN | 0.61 | 0.58 | 0.57 | 0.54 | 0.52 | 0.50 | 0.47 | 0.46 | 0.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jonnalagadda, J.; Hashemi, M. Long Lead ENSO Forecast Using an Adaptive Graph Convolutional Recurrent Neural Network. Eng. Proc. 2023, 39, 5. https://doi.org/10.3390/engproc2023039005
Jonnalagadda J, Hashemi M. Long Lead ENSO Forecast Using an Adaptive Graph Convolutional Recurrent Neural Network. Engineering Proceedings. 2023; 39(1):5. https://doi.org/10.3390/engproc2023039005
Chicago/Turabian StyleJonnalagadda, Jahnavi, and Mahdi Hashemi. 2023. "Long Lead ENSO Forecast Using an Adaptive Graph Convolutional Recurrent Neural Network" Engineering Proceedings 39, no. 1: 5. https://doi.org/10.3390/engproc2023039005
APA StyleJonnalagadda, J., & Hashemi, M. (2023). Long Lead ENSO Forecast Using an Adaptive Graph Convolutional Recurrent Neural Network. Engineering Proceedings, 39(1), 5. https://doi.org/10.3390/engproc2023039005