Abstract
In recent decades, Artificial Intelligence (AI) has become an essential tool for modeling and forecasting in different research fields. Mechanical engineering is no exception because practical problems that classical methods can hardly solve can receive more efficient solutions using AI. Given a support scheme of a structural system, the article aims to determine the maximum stiffness of the system based on the series of moments’ variation for a variable dimensional parameter of the support. The series represents the input for a Gene Expression Programming (GEP) aiming to determine the model for a specific geometric parameter in mechanical structures, namely, deflection.
1. Introduction
Structural design, material selection, and optimizing fabrication costs are the main subjects in the machinery industry. The goals of structural design are rational exploitation, economical maintenance, and safety operation. All of these demand a good structural design confirmed by optimal structural stiffness.
Engineering optimization problems are often very complex and present non-linear behavior, so finding their solution represents a topic of interest in the scientific literature. Classical approaches might fail in finding the best solution, so other techniques are necessary. It was shown that Artificial Intelligence (AI) methods could provide alternative solutions without restrictions on the data series. Methods like Gene Expression Programming and Generalized Regression Neural Networks (GRNN) have been successfully used in optimization problems in material science [1], mechanics [2], signal processing [3], meteorology and hydrology [4,5,6,7], natural sciences [8], and economics [9].
This paper proposes to find the solution to a mechanical engineering problem using GEP. The proposed approach can determine a better solution in a shorter time [2].
2. The Study Problem
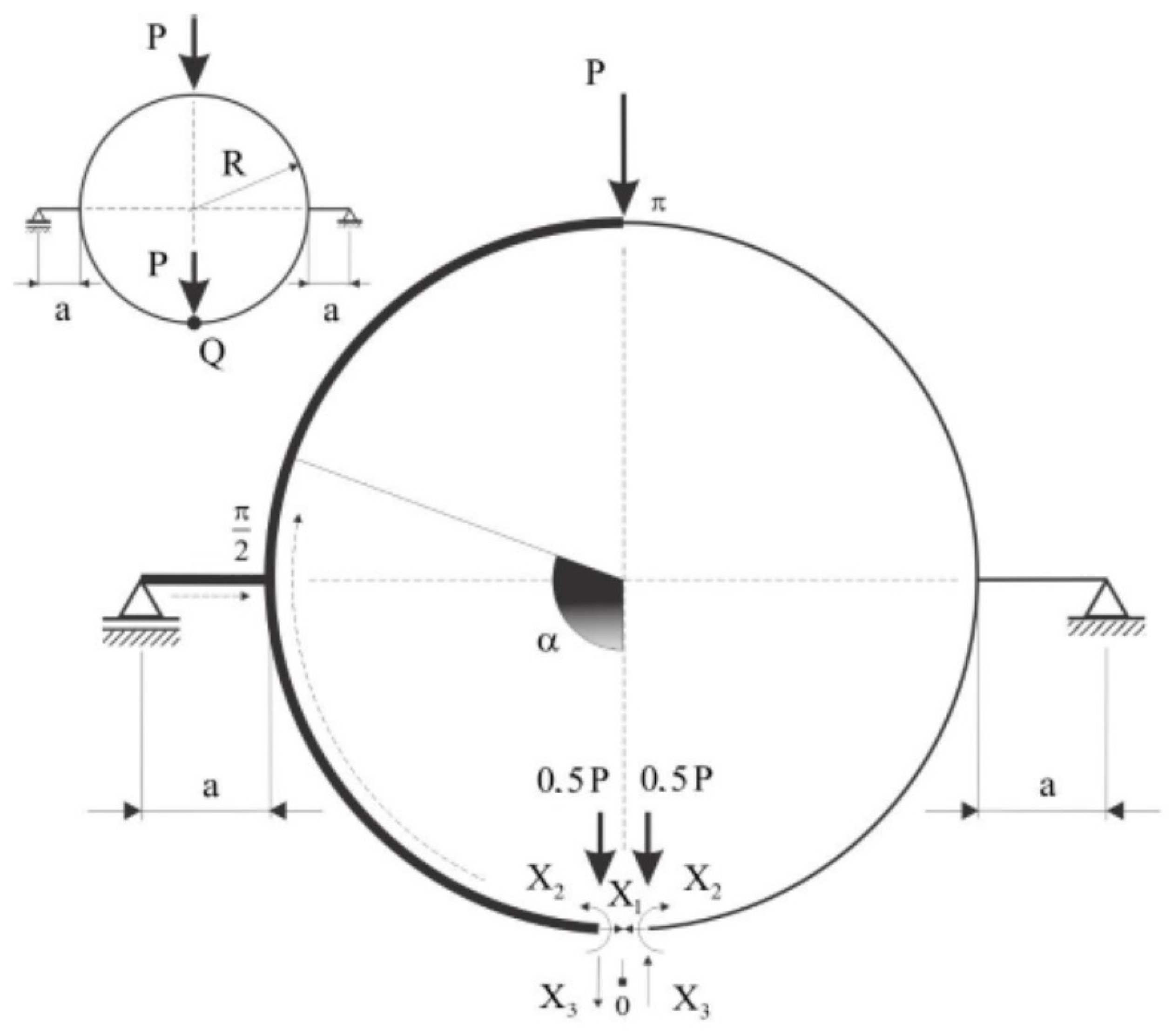
The application presented in the paper [10] requires finding a value of a geometric parameter “a” of a particular support scheme to determine the maximum rigidity of the system (Figure 1, top-left representation). The structure is designed as a circular frame, laterally supported through two beams by fixed support and slide support. The frame is loaded in its plane with two forces P in the highest and lowest points (in circle quadrants). The frame has the R radius, and the supporting beams are equal in length (“a” value).
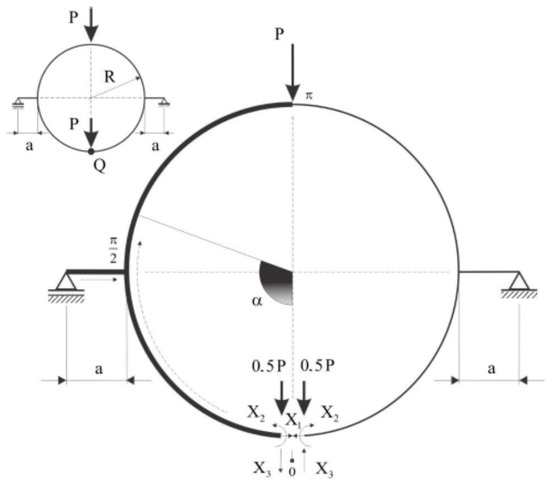
Figure 1.
The initially indeterminate static system (top-left representation) and the basic form used in removing indeterminacy.
Figure 1 presents a possible basic form of the proposed statically three times indeterminate system. Considering the symmetry of the support schemes, respectively loading, the value of the unknown antisymmetric shear force type is zero [11]. By using the bending moment terms in Maxwell–Mohr [11] exclusively, eliminating the system indeterminacy involves solving the system of two equations with two unknowns (1) of the form:
Using the moment diagram, the system’s solution has the following form [10]:
The performance criterion chosen for quantifying the global stiffness of system (2) is the projection of the displacement of point Q on the vertical plane given by the relation:
where are the polynomial forms of the corresponding bending moment variations [10].
Considering the working variable , the vertical projection displacement of the point Q will depend on q, that is . The goal is to determine a GEP model for the deflection .
In the following, we shall solve the problem for a sample case in which the values for the force, frame radius, and material properties are , respectively.
3. Methodology
The first step is to generate the deflection values for different q values. To reduce the computation effort, the AxisVM13LT (https://axisvm.eu/ (accessed on 3 February 2023)) and Solidworks (https://www.solidworks.com/ (accessed on 3 February 2023)) software were utilized. The software was chosen because it is designed for structure calculations using Finite Element Analysis (FAE) [12].
Since the aim of the article is not the FEA computation, we shall not present these details here. For more information on the topic, the reader may see [10].
In the second step, GEP was employed to model the deflection.
GEP has futures from Genetic Algorithms (GA) and Genetic Programming (GP), working with function and terminal sets, evaluating the individual using a fitness function, and evolving the generation until a termination condition is met [13,14]. In GEP, a candidate solution to a problem represents a formula formed by a composition of constants, variables, and functions structured as a mathematical expression parse tree. GEP individuals are strings of symbols encoding non-linear expressions formed by genes with a fixed length. The chromosomes are formed by genes in a constant number for all the population’s members. The structure of a gene is formed by a head (composed of any symbol) and a tail (composed of constants and variables). The operators used in GEP are transposition, mutation, and crossover. The candidate solutions are evaluated using the fitness function. For details on GEP, the reader may see [1,13].
The input was formed by the data series generated at the previous step and the corresponding a values.
To perform the modeling data series was divided into two parts: 70% for training and 30% for validation. The following settings of the GEP parameters were used: population size: 50, maximum tries for the initial population: 10,000, number of genes per chromosome: 4, the length of the gene’s head: 8, the maximum number of generations: 2000, and the number of generations without improvement: 1000. The fitness function was the variance explained by the model (R2), and the hit tolerance was 0.01. The addition was the linking function. The inversion, IS, and RIS transposition rates were set to 0.1, the one- and two-point recombination to 0.3, the gene transposition and recombination rates to 0.1, and the mutation rate was 0.03. The following operators and functions were used to obtain the GEP model: +, −, ×, /, sqrt. Leave-one-out method was used to check the model’s quality.
The modeling was carried out in DTREG.
4. Results and Discussion
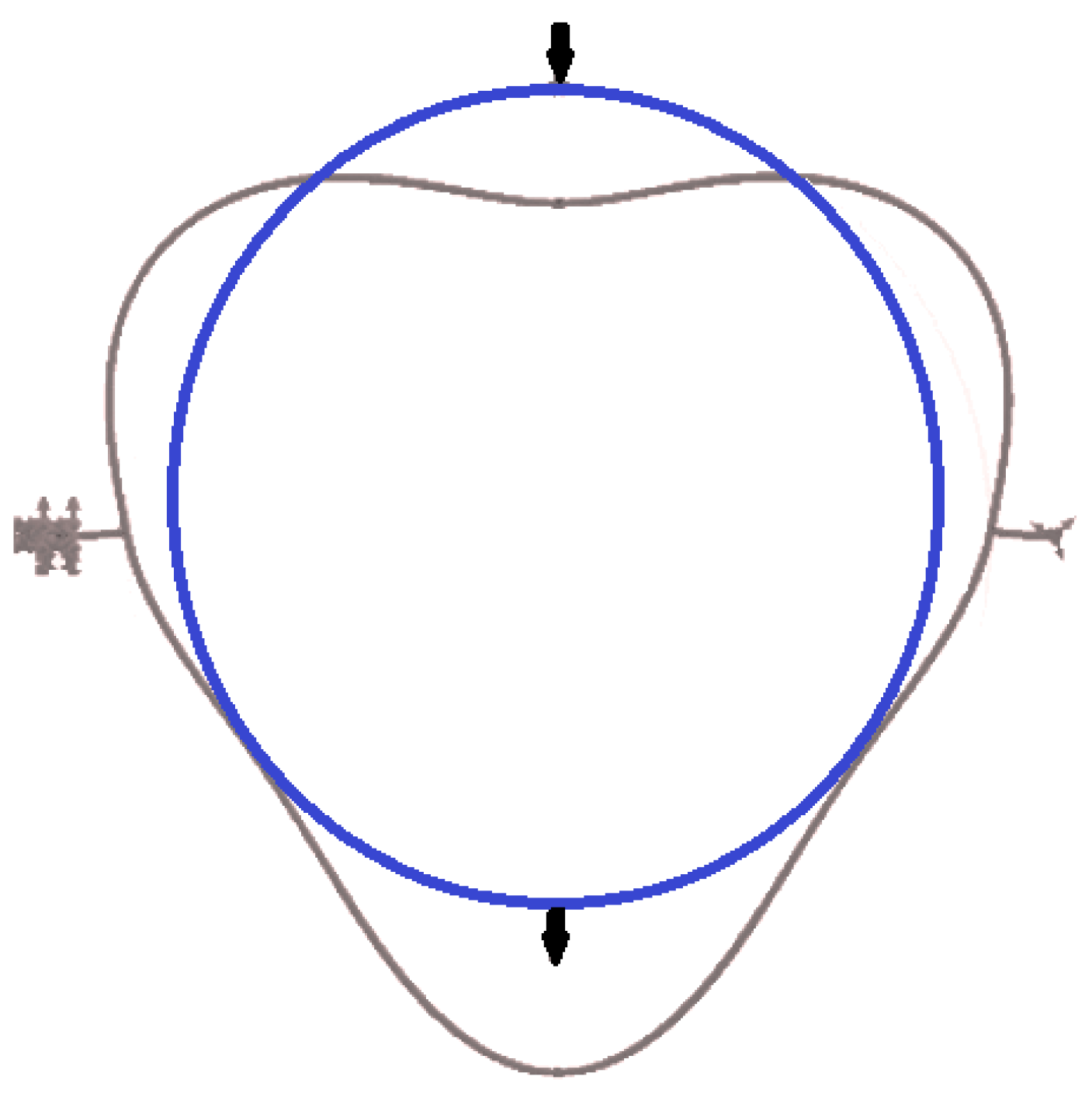
Figure 2 shows the system deformation resulting from the AxisVM simulation in the studied case.
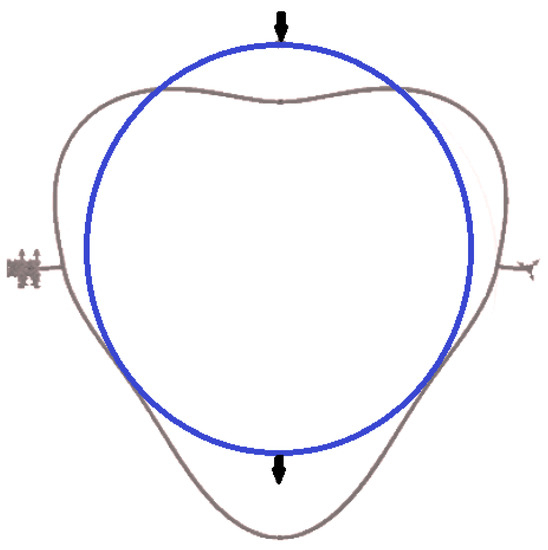
Figure 2.
The system deformation: q—on the abscissa, and on the ordinate.
After running the GEP algorithm, the following expression was generated for the deflection as a function of a:
or
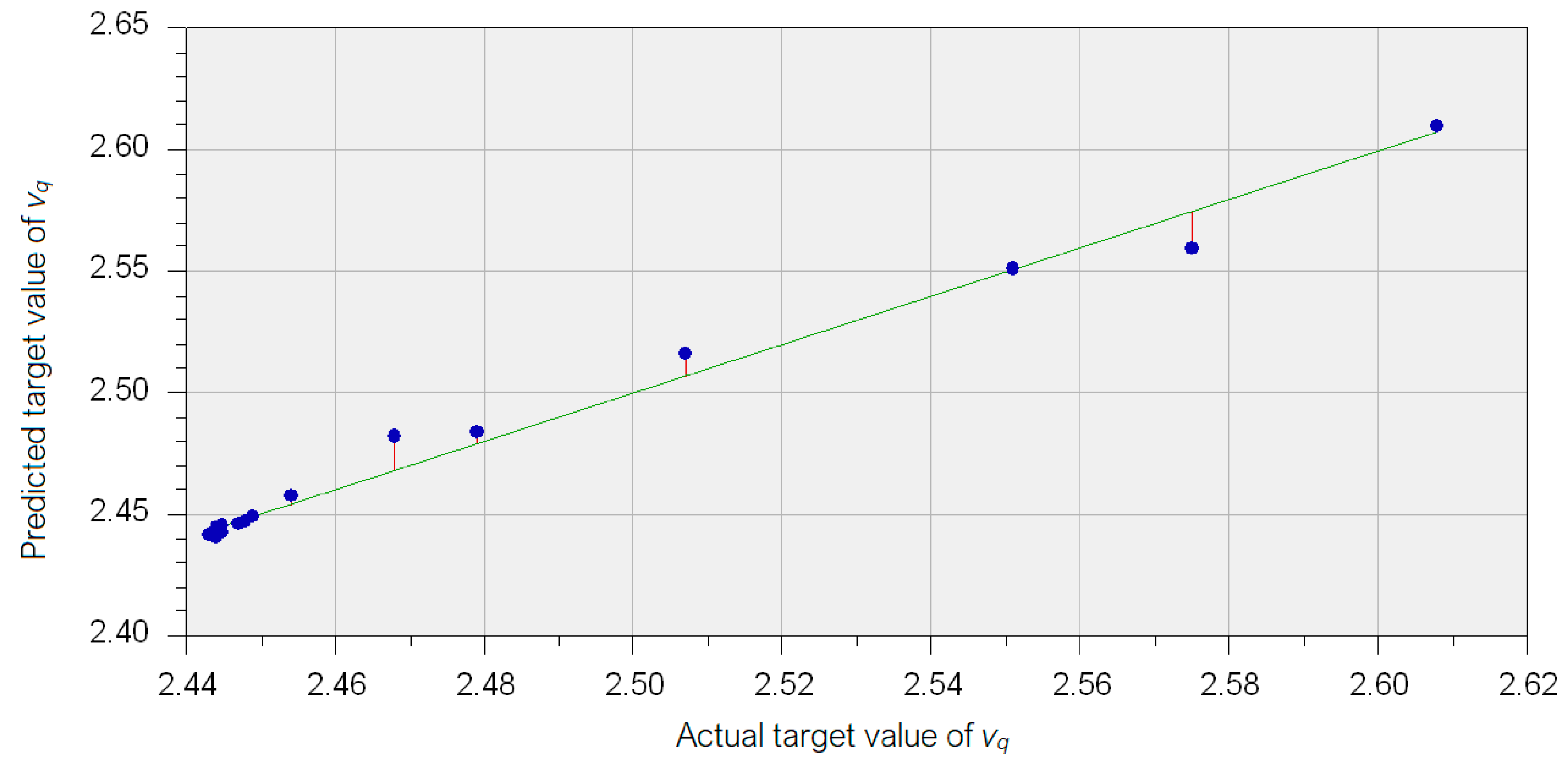
Figure 3 shows the chart of the actual vs. predicted error in the model. Most values are situated at a small distance (measured on the parallel of the Ox axis) from the first bisectrix of the axes of coordinates, indicating good model quality. To confirm this last assertion, the goodness of fit indicators (R2), mean square error (MSE), mean absolute error (MAE), mean absolute percentage error (MAPE), and the correlation between the actual and predicted values (rap) are displayed in Table 1.
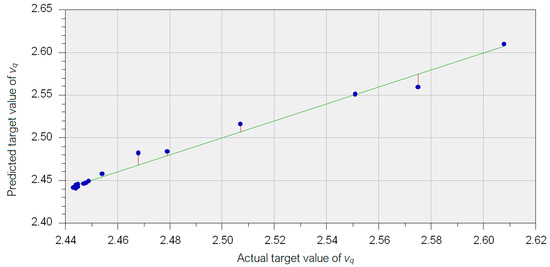
Figure 3.
Predicted target values vs. actual target values in the GEP model.

Table 1.
The goodness of fit indicators in the GEP model.
The R2 values are over 0.97, showing that 98.705% (97.299%, respectively) of the deflection variation is explained by the variation of the explicative variable. Moreover, there is a very good correlation between the actual and target values, with both rap values being above 0.99. In terms of MAE and MSE, the model performs better on the Training set than on the Test data set, but all these values are very low (MAEs < 0.036 and MSE < 0.00009), indicating that the model fits very well the data series.
An analogous study has been conducted using the SolidWorks output. The results are similar in terms of goodness of fit indicators on the Training set, while on the Test set, they are worse. The explanation is that the accuracy mainly depends on the type of discretization used in FEA computation by each application (beam meshing is a simpler discretization than solid meshing) and on the structure supporting schema.
5. Conclusions
Based on a set of deflection values obtained through FEA software or manual calculation, an Artificial Intelligence algorithm was built using GEP. This algorithm finds the expression of deflection variation as a function of parameter a, where a/R quantifies the structure stiffness in the studied problem. For a practical case, using this model, the deflection’s extreme values can be determined to analyze the structural behavior in different loading cases for this supporting schema. Similar modeling expressions for deflection variation using Artificial Intelligence must be generated for other supporting schema.
Author Contributions
Conceptualization, C.Ș.D. and Ș.M.; methodology, Ș.M. and R.P.; software, R.P.; validation, C.Ș.D. and O.T.; formal analysis, O.T. and A.R.S.; investigation, Ș.M. and A.R.S.; resources, Ș.M.; writing—original draft preparation, C.Ș.D. and ȘM.; writing—review and editing, C.Ș.D.; visualization, Ș.M.; supervision, C.Ș.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dumitriu, C.Ș.; Bărbulescu, A. Artificial intelligence models for the mass loss of copper-based alloys under the cavitation. Materials 2022, 15, 6695. [Google Scholar] [CrossRef] [PubMed]
- Șerban, C.; Dumitriu, C.Ș.; Bărbulescu, A. Solving Single Nesting Problem Using a Genetic Algorithm. An. Ştiinţifice Univ. Ovidius Constanţa Ser. Mat. 2020, 30, 259–272. [Google Scholar]
- Dumitriu, C.Ș.; Dragomir, F.-L. Modeling the signals collected in cavitation field by stochastic and Artificial intelligence methods. In Proceedings of the 2021 13th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Pitesti, Romania, 1–3 July 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Bărbulescu, A. Time Series with Applications; Junimea: Iasi, Romania, 2002. (In Romanian) [Google Scholar]
- Bărbulescu, A.; Băutu, E. Time Series Modeling Using an Adaptive Gene Expression Programming. Int. J. Math. Models Methods Appl. Sci. 2009, 2, 85–93. [Google Scholar]
- Băutu, E.; Bărbulescu, A. Forecasting meteorological time series using soft computing methods: An empirical study. Appl. Math. Inf. Sci. 2013, 7, 1297–1306. [Google Scholar] [CrossRef]
- Bărbulescu, A.; Șerban, C.; Indrecan, M.-L. Computing the Beta Parameter in IDW Interpolation by Using a Genetic Algorithm. Water 2021, 13, 863. [Google Scholar] [CrossRef]
- Bărbulescu, A.; Șerban, C.; Caramihai, S. Assessing the soil pollution using a genetic algorithm. Rom. J. Phys. 2021, 66, 806. [Google Scholar]
- Bărbulescu, A. Do the time series statistical properties influence the goodness of fit of GRNN models? Study on financial series. Appl. Stoch. Models Bus. Ind. 2018, 34, 586–596. [Google Scholar] [CrossRef]
- Mocanu, Ș. The stiffness as an optimization parameter of a structure. Sinteze de Mecanică Teoretică și Aplicată 2016, 7, 335–342. (In Romanian) [Google Scholar]
- Popov, E.P. Mechanics of Materials; Prentice-Hall: Englewood Cliffs, NJ, USA, 1976. [Google Scholar]
- Akin, J. Finite Element Analysis Concepts via SolidWorks; World Scientific: Singapore; Rice University: Houston, TX, USA, 2009. [Google Scholar]
- Ferreira, C. Gene Expression Programming: Mathematical Modeling by an Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Sharifi, Y.; Moghbeli, A. New predictive models via gene expression programming and multiple nonlinear regression for SFRC beams. J. Mater. Res. Technol. 2020, 9, 14294–14306. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).