
Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
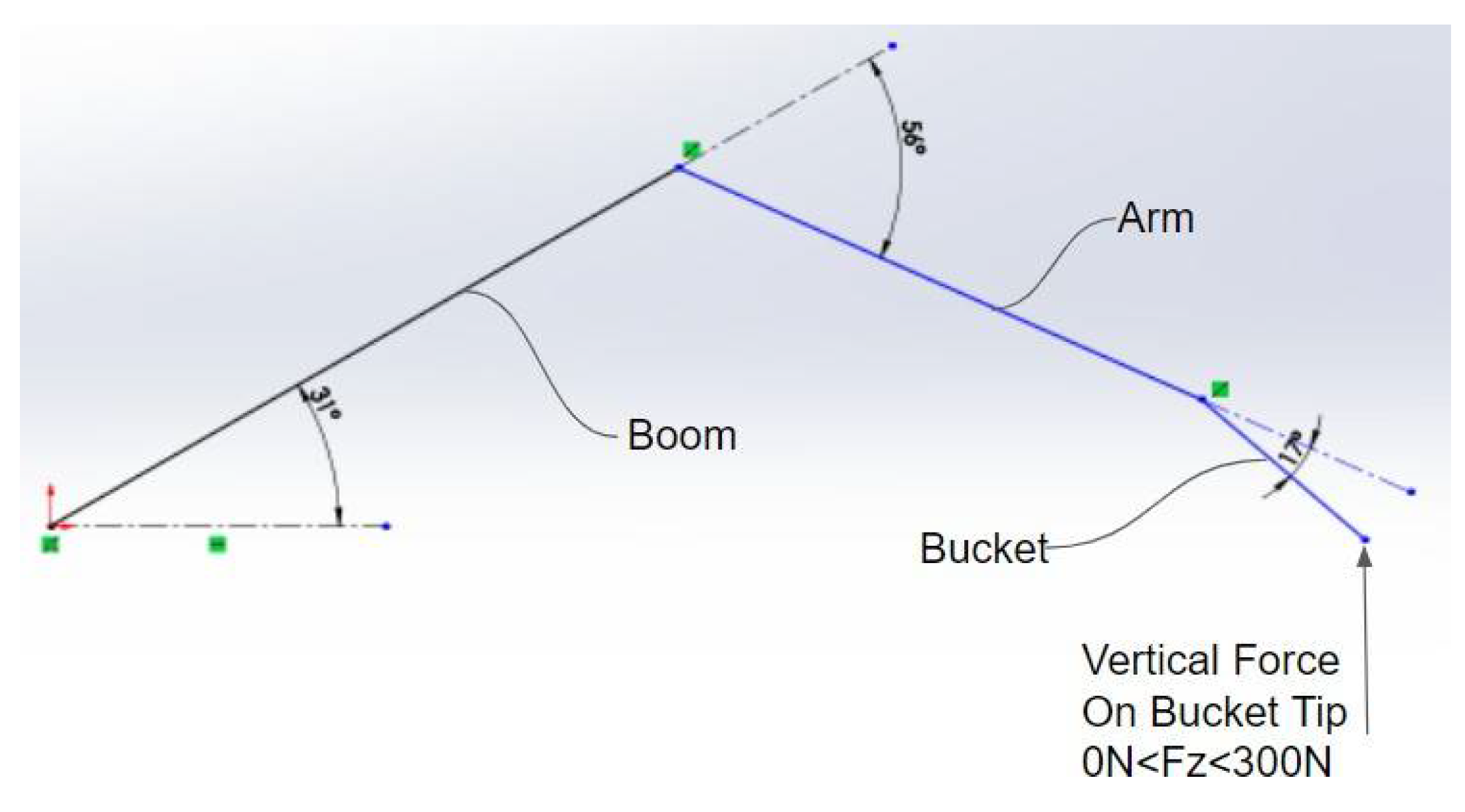
2.1. Design
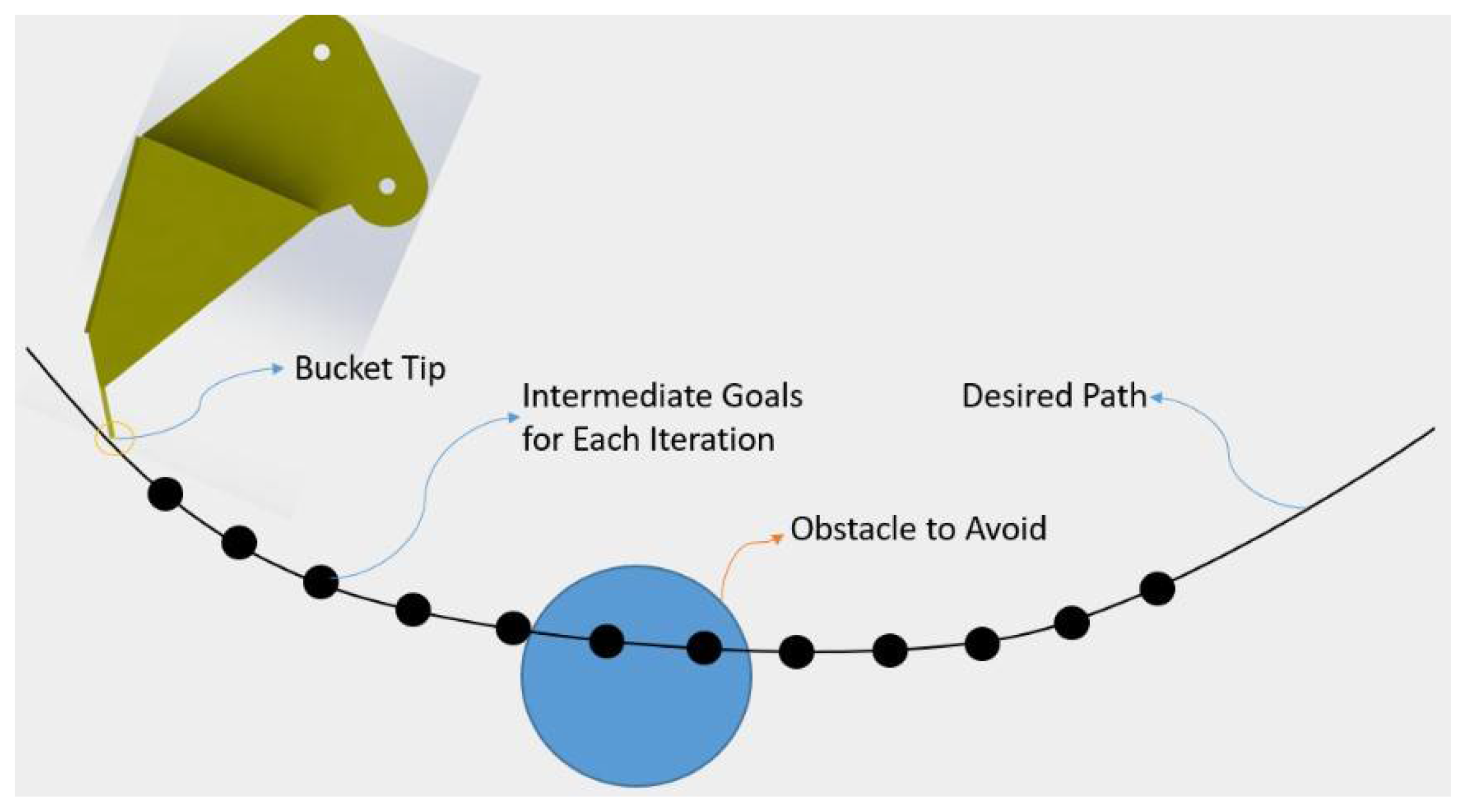
2.2. Optimal Path-Generation Method
3. Results
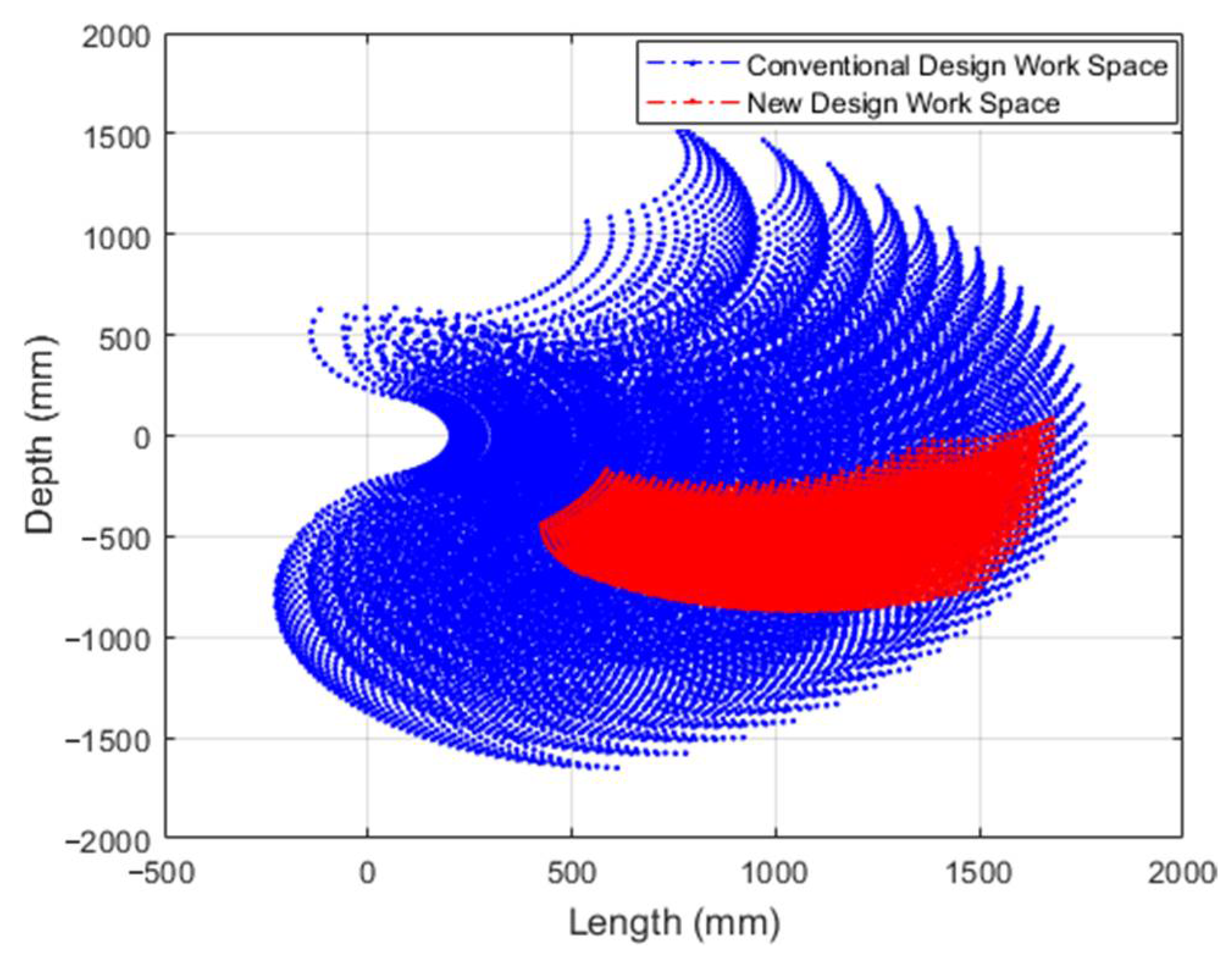
3.1. Design
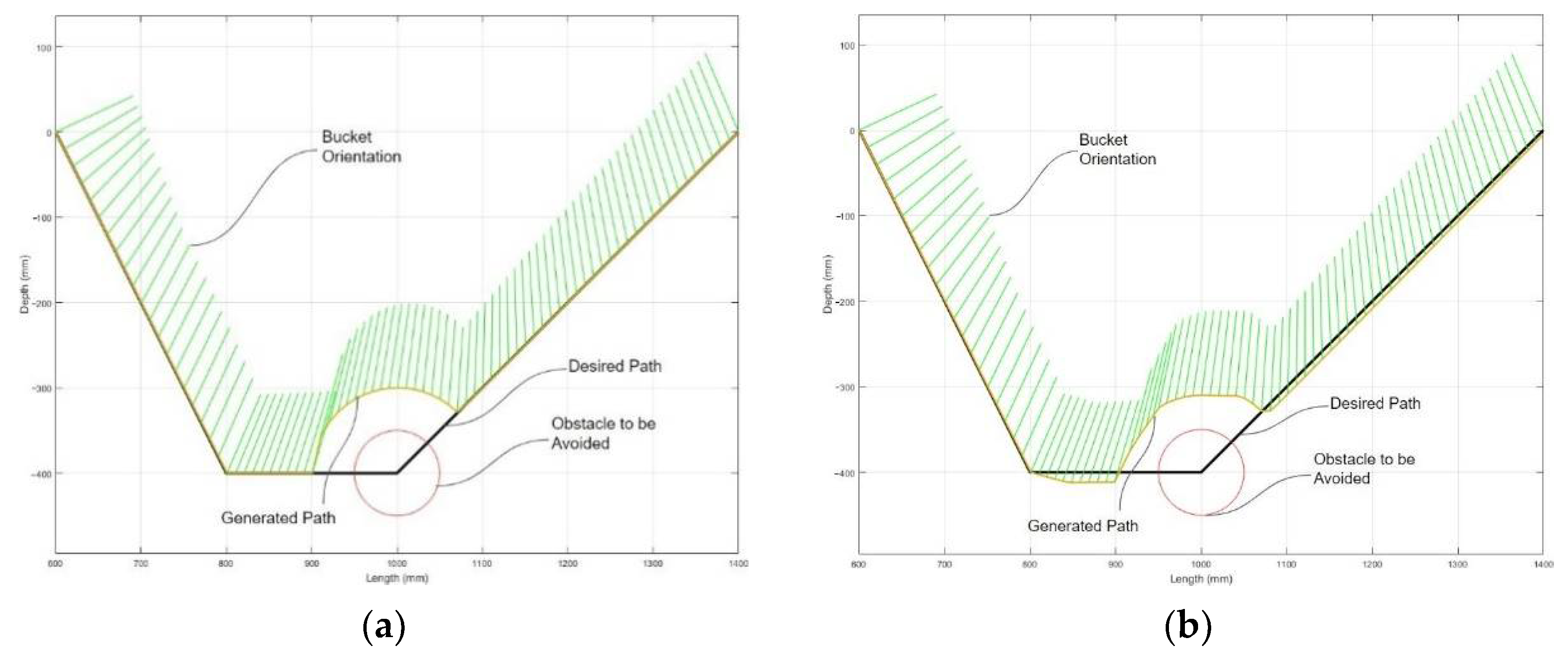
3.2. Optimal Path Generation Method
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Chen, L.; Ai, Y.; Tian, B.; Cao, D.; Li, L. Scheduling of Autonomous Mining Trucks: Allocation Model Based Tabu Search Algorithm Development. 2021. Available online: https://ieeexplore-ieee-org.uproxy.library.dc-uoit.ca/document/9564491/ (accessed on 13 May 2022).
- Malmgren, I. Quantifying the Societal Benefits of Electric Vehicles. World Electr. Veh. J. 2016, 8, 996–1007. [Google Scholar] [CrossRef]
- Perujo, A.; Ciuffo, B. The introduction of electric vehicles in the private fleet: Potential impact on the electric supply system and on the environment. A case study for the Province of Milan, Italy. Energy Policy 2010, 38, 4549–4561. [Google Scholar] [CrossRef]
- Bedotti, A.; Campanini, F.; Pastori, M.; Riccò, L.; Casoli, P. Energy saving solutions for a hydraulic excavator. Energy Procedia 2017, 126, 1099–1106. [Google Scholar] [CrossRef]
- Yang, J.; Quan, L.; Yang, Y. Excavator energy-saving efficiency based on diesel engine cylinder deactivation technology. Chin. J. Mech. Eng. 2012, 25, 897–904. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Zhang, X.; Dong, Z.; Yang, J. Power Matching and Energy Efficiency Improvement of Hydraulic Excavator Driven with Speed and Displacement Variable Power Source. Chin. J. Mech. Eng. 2019, 32, 100. [Google Scholar] [CrossRef]
- Quan, Z.; Quan, L.; Zhang, J. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renew. Sustain. Energy Rev. 2014, 35, 336–346. [Google Scholar] [CrossRef]
- Lucidarme, P.; Delanoue, N.; Mercier, F.; Aoustin, Y.; Chevallereau, C.; Wenger, P. Preliminary Survey of Backdrivable Linear Actuators for Humanoid Robots. In ROMANSY 22–Robot Design, Dynamics and Control. CISM International Centre for Mechanical Sciences; Springer: Cham, Switzerland, 2019; Volume 584, pp. 304–313. [Google Scholar] [CrossRef]
- Thöndel, E. Linear electromechanical actuator as a replacement of hydraulic cylinder for electric motion platform for use in simulators. In Proceedings of the 2nd International Conference on Applied Informatics and Computing Theory, Prague, Czech Republic, 26–28 September 2011; pp. 290–295. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2017, 22, 387–408. [Google Scholar] [CrossRef]
- Products & Services—North America|Cat|Caterpillar. Available online: https://www.cat.com/en_US.html (accessed on 13 May 2022).




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khiyavi, O.A.; Seo, J.; Lin, X. Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation. Eng. Proc. 2022, 24, 5. https://doi.org/10.3390/IECMA2022-12896
Khiyavi OA, Seo J, Lin X. Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation. Engineering Proceedings. 2022; 24(1):5. https://doi.org/10.3390/IECMA2022-12896
Chicago/Turabian StyleKhiyavi, Omid Ahmadi, Jaho Seo, and Xianke Lin. 2022. "Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation" Engineering Proceedings 24, no. 1: 5. https://doi.org/10.3390/IECMA2022-12896
APA StyleKhiyavi, O. A., Seo, J., & Lin, X. (2022). Energy Saving in an Autonomous Excavator via Parallel Actuators Design and PSO-Based Excavation Path Generation. Engineering Proceedings, 24(1), 5. https://doi.org/10.3390/IECMA2022-12896