Deterministic Propagation Approach for Millimeter-Wave Outdoor Smart Parking Solution Deployment †

 ,
, 

 ,
,  and
and
Abstract
:1. Introduction
2. Scenario Description
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nations, U.; Economic, D.o.; Affairs, S.; Division, P. World Urbanization Prospects The 2018 Revision; United Nations: New York, NY, USA, 2019. [Google Scholar]
- Matolak, D.W.; Sun, R.; Liu, P. V2V channel characteristics and models for 5 GHz parking garage channels. In Proceedings of the 2015 9th European Conference on Antennas and Propagation, EuCAP 2015, Lisbon, Portugal, 13–17 April 2015; pp. 1–4. [Google Scholar]
- Sun, R.; Matolak, D.W.; Liu, P. Parking garage channel characteristics at 5 GHZ for V2V applications. In Proceedings of the IEEE Vehicular Technology Conference, Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Uyrus, A.; Turan, B.; Basar, E.; Coleri, S. Visible Light and mmWave Propagation Channel Comparison for Vehicular Communications. In Proceedings of the IEEE Vehicular Networking Conference, Los Angeles, CA, USA, 4–6 December 2019. [Google Scholar] [CrossRef]
- Al-Samman, A.M.; Rahman, T.A.; Hindia, M.H.D.N.; Daho, A.; Hanafi, E. Path loss model for outdoor parking environments at 28 GHz and 38 GHz for 5G wireless networks. Symmetry 2018, 10, 672. [Google Scholar] [CrossRef]
- Zhang, P.; Yang, B.; Yi, C.; Wang, H.; You, X. Measurement-Based 5G Millimeter-Wave Propagation Characterization in Vegetated Suburban Macrocell Environments. IEEE Trans. Antennas Propag. 2020, 68, 5556–5567. [Google Scholar] [CrossRef]
- AAzpilicueta, L.; Rawat, M.; Rawat, K.; Ghannouchi, F.; Falcone, F. A Ray Launching-Neural Network Approach for Radio Wave Propagation Analysis in Complex Indoor Environments. IEEE Trans. Antennas Propag. 2014, 62, 2777–2786. [Google Scholar] [CrossRef]
- Azpilicueta, L.; Lopez-Iturri, P.; Zuñiga-Mejia, J.; Celaya-Echarri, M.; Rodríguez-Corbo, F.A.; Vargas-Rosales, C.; Aguirre, E.; Michelson, D.G.; Falcone, F. Fifth-Generation (5G) mmWave Spatial Channel Characterization for Urban Environments’ System Analysis. Sensors 2020, 20, 5360. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| TX power | 25 dBm |
| Carrier frequency | 28 GHz |
| Bit rate | 4.62 Gbps |
| Antenna type/gain | Directional/20 dB |
| 3D ray launching: angular resolution/rebounds | 0.2 degree/6 |
| Scenario size/unitary volume analysis | (54 × 42 × 15) m/1m3 (1 × 1 × 1) m |
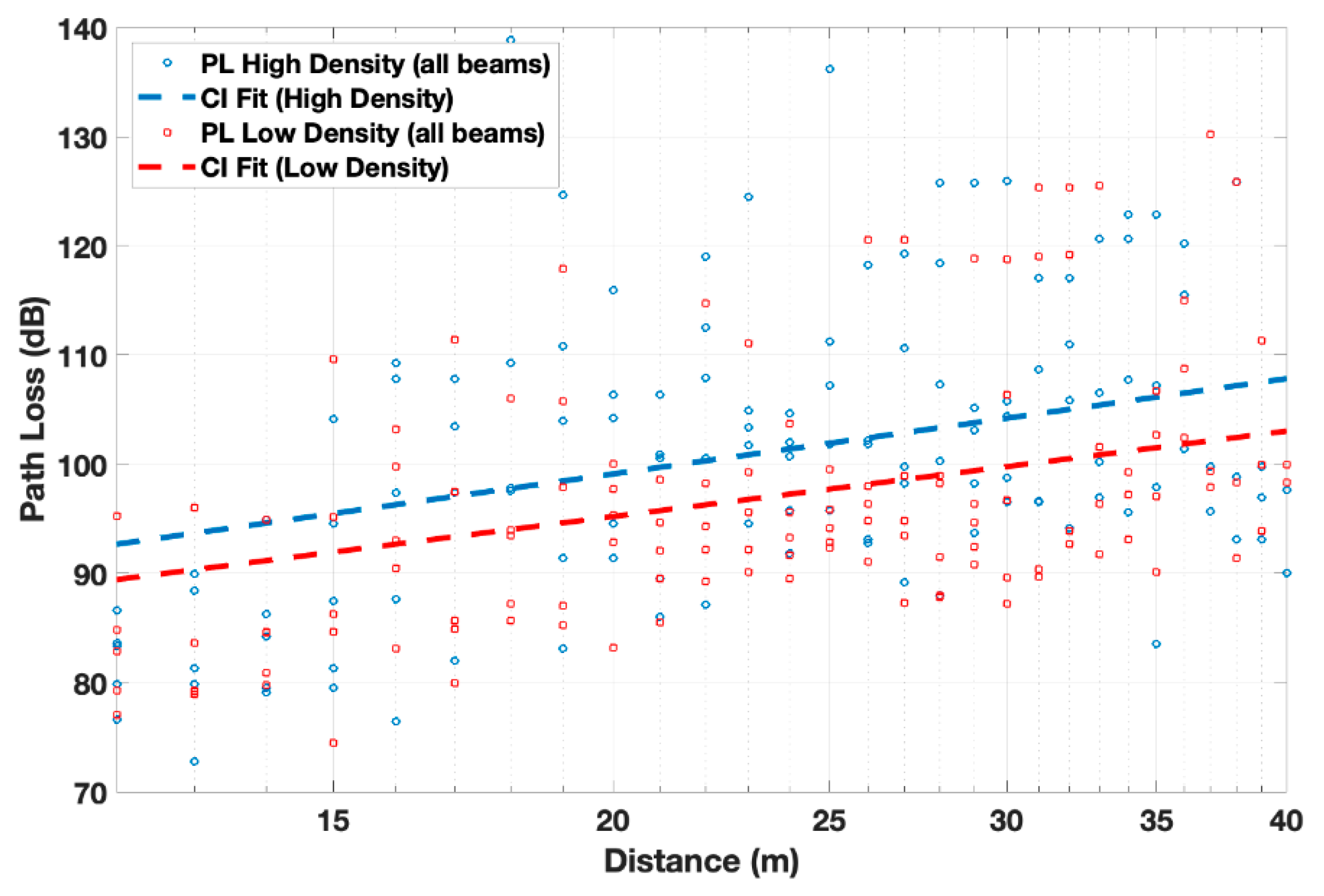
| Parameter | High Density | Low Density | Difference |
|---|---|---|---|
| 2.79 | 2.5 | 0.29 | |
| 11.56 dB | 9.08 dB | 2.48 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Corbo, F.A.; Azpilicueta, L.; Celaya-Echarri, M.; Lopez-Iturri, P.; Alejos, A.V.; Falcone, F. Deterministic Propagation Approach for Millimeter-Wave Outdoor Smart Parking Solution Deployment. Eng. Proc. 2020, 2, 81. https://doi.org/10.3390/ecsa-7-08231
Rodríguez-Corbo FA, Azpilicueta L, Celaya-Echarri M, Lopez-Iturri P, Alejos AV, Falcone F. Deterministic Propagation Approach for Millimeter-Wave Outdoor Smart Parking Solution Deployment. Engineering Proceedings. 2020; 2(1):81. https://doi.org/10.3390/ecsa-7-08231
Chicago/Turabian StyleRodríguez-Corbo, Fidel Alejandro, Leyre Azpilicueta, Mikel Celaya-Echarri, Peio Lopez-Iturri, Ana V. Alejos, and Francisco Falcone. 2020. "Deterministic Propagation Approach for Millimeter-Wave Outdoor Smart Parking Solution Deployment" Engineering Proceedings 2, no. 1: 81. https://doi.org/10.3390/ecsa-7-08231
APA StyleRodríguez-Corbo, F. A., Azpilicueta, L., Celaya-Echarri, M., Lopez-Iturri, P., Alejos, A. V., & Falcone, F. (2020). Deterministic Propagation Approach for Millimeter-Wave Outdoor Smart Parking Solution Deployment. Engineering Proceedings, 2(1), 81. https://doi.org/10.3390/ecsa-7-08231