1. Introduction
Data collected by pervasive sensor networks have to be processed, since they are usually unmanageable in their raw forms. Their dimension is the principal obstacle making their use extremely difficult, while the information content is typically highly redundant. Synthetic features like spectral peak frequencies, usually exploited when the acquired data are shaped as Time Series (TS), are extracted to solve engineering tasks, like load identification and Structural Health Monitoring (SHM) [
1,
2]. Deep Learning (DL) allows extracting features from the data according to the required task, avoiding any preliminar feature design [
3,
4,
5,
6]. Among DL techniques, AutoEncoders (AEs) are special type of Neural Networks (NN) able to obtain a reduced data representation [
7], also called latent representation, without specifying the task the reduced data representation must be used for.
The NN architecture employed by an AE is usually deep or, in other words, involves the use of multiple sequential transformations. The advantages of employing AEs are manifold: (i) no feature engineering is necessary; (ii) the obtained reduced data representation can be used for different tasks; (iii) they provide the most informative data representation by setting the number of latent variables or, at least, the one that allows to reconstruct data at best. Thanks to their reduced number, latent variables are often interpretable, but only at the price of knowing something about what stays behind the variability of the collected data [
8].
In the following, a novel TS AE is proposed for the dimensionality reduction of the pseudo-experimental Multivariate Time Series (MTSs) recordings related to the displacement response of a two-storey shear building. The effectiveness of the dimensionality reduction is judged by the AE ability of reconstructing the input signals from their latent representation. Despite the lack of any a priori performed task-oriented feature engineering, the obtained reduced data representation allows the identification of the load conditions applied to the building.
2. Methodology: A Deep Autoencoder for Load Identification
A Neural Network (NN) is a collection of units, called neurons. Each neuron performs, in its basic form, a linear combination of its input (which reads for the AE input channels, see below) via a weight vector , and applies a nonlinear activation function . If a set of L neurons, called layer, is applied to , the output becomes a vector , where . Many layers can be stacked one after another, making the NN architecture deep.
A special type of NN layer is the convolutional one, which allows to infer correlations within and across the inputs, whenever the inputs are shaped as a collection of one-dimensional arrays. In this work, the inputs are a set of MTSs
acquired by a sensor system employing
N sensors, and sampling
L displacement recordings within a time interval
. The output
of a one-dimensional convolutional layer then reads
where:
is the discrete convolution operator [
9];
are the weights applied to
(with
);
collects all the layer weights;
is the kernel dimension;
N also represents the number of channels of the input layer;
is the number of channels of the output layer.
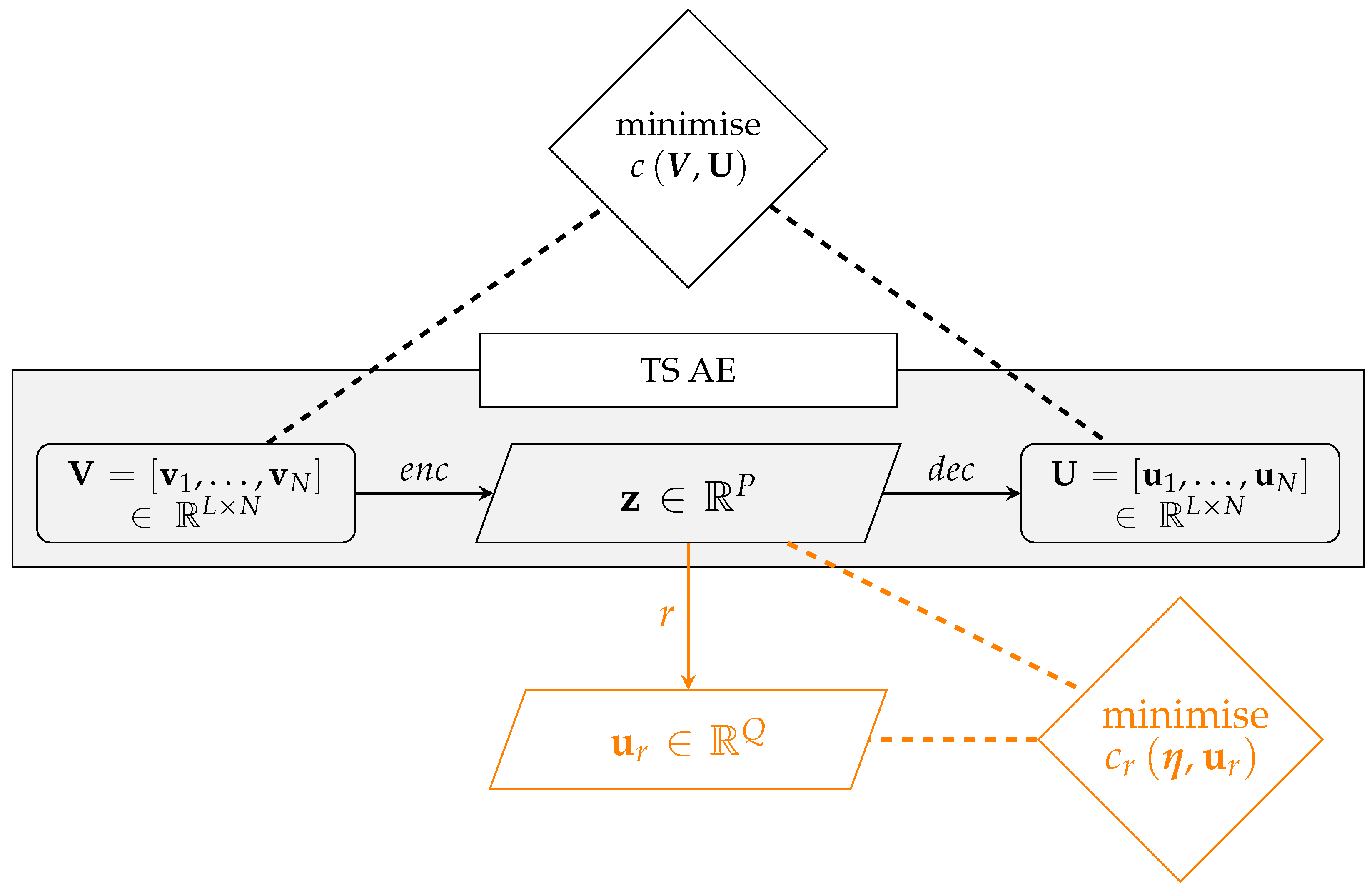
One-dimensional convolutional layers are the building blocks of the proposed AE. This latter is composed by an encoder
and by a decoder
. The encoder maps the input
into a latent representation
, with
, while the decoder maps
into a two dimensional array
. Being
shaped as
, we can enforce the AE to reconstruct
from
by defining
as loss function to be minimised by the NN during the training, which consists in tuning the weights
ruling the layer operations.
The latent representation
can be used to solve a regression problem, involving the identification of the parameter vector
e.g., governing the loadings applied to the structure. If the decoder can (almost perfectly) reconstruct
starting from
, it means that
condenses all the relevant informations of
. As shown in
Figure 1, a NN-based regression model
r is employed to retrieve
starting from
, accomplishing this way the load identification task. To train
r, a loss function
is defined as done in Equation (
2), where
is the prediction of
r. The training of the AE and of
r takes place sequentially, first minimising
, and then minimising
. A popular first-order stochastic gradient descend algorithm, called Adam [
10], has been employed for these procedure tasks.
3. Results and Discussion
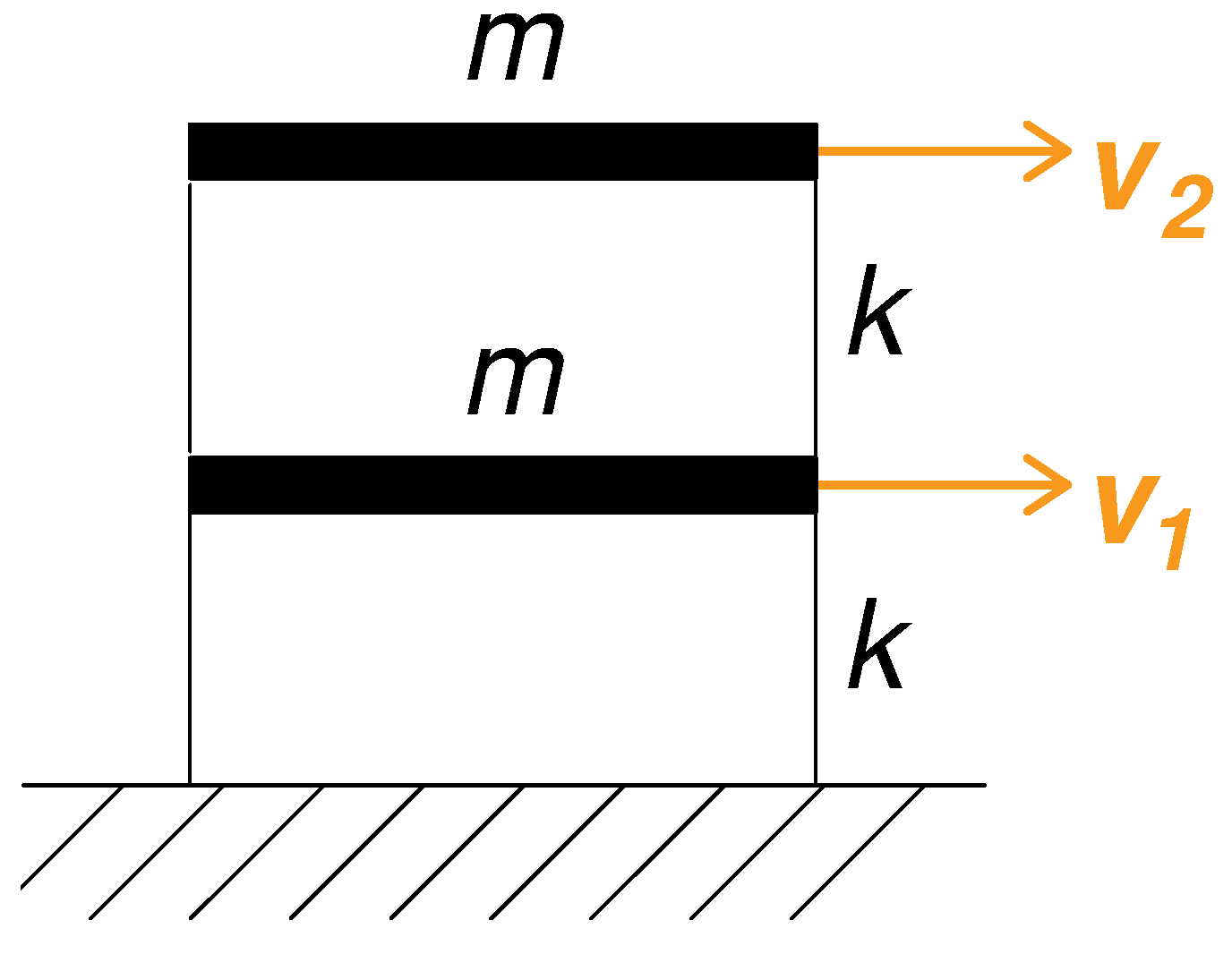
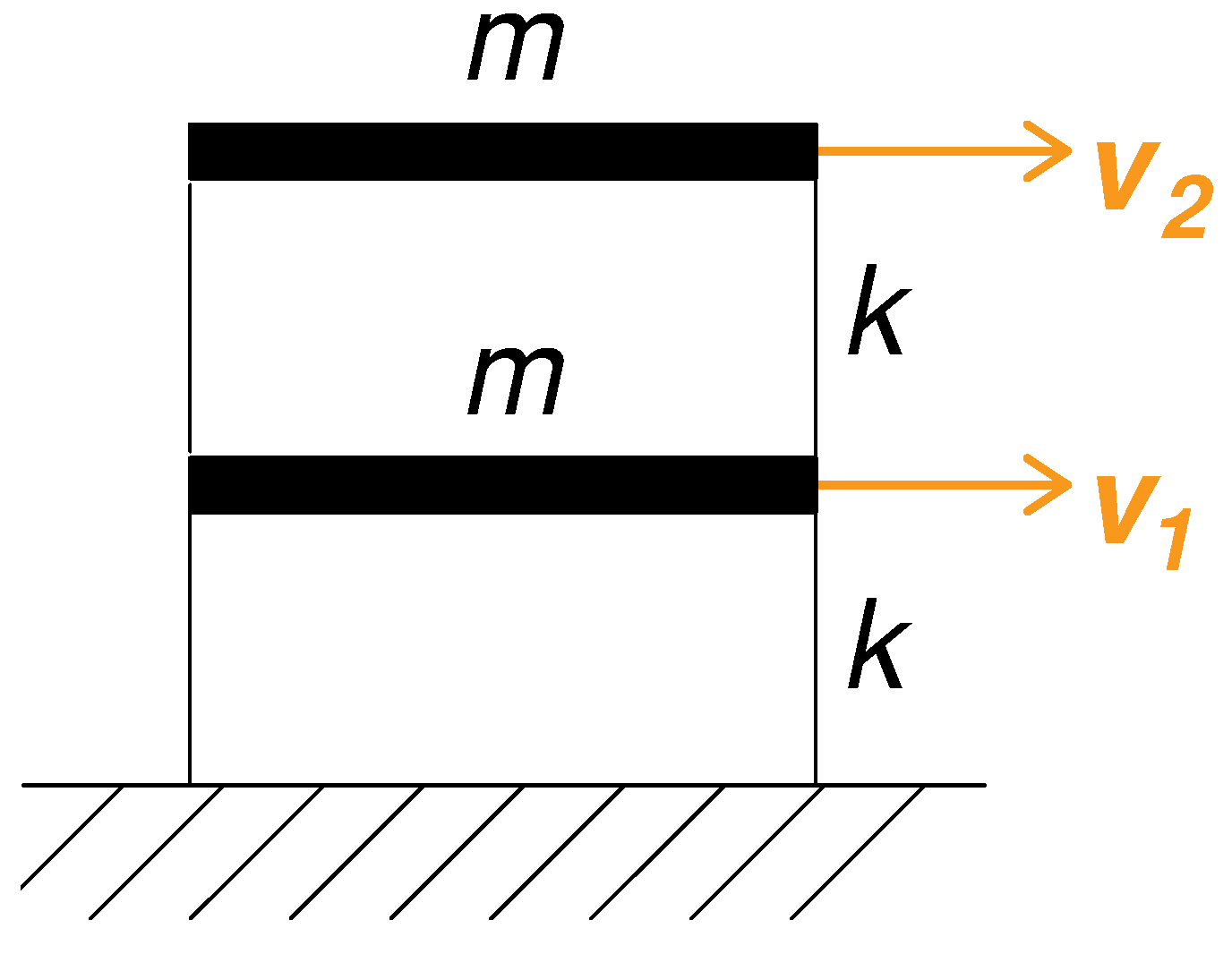
The lateral displacements of a two-storey building, shown in
Figure 2, are monitored by a sensor system employing two sensors (one per floor), recording
L samples within the time window
. Then, the output of the monitoring system is an MTS
, with
and
. The dynamic response of the structure is simulated by means of a two-dimensional shear building model wherein, due to the mass distribution and load bearing elements, torsional effects have been disregarded. Damping has not been modelled, having a negligible effect on the identification of continuously excited structures [
11,
12]. We assumed that the applied lateral loads consist of forces enforced at the floor levels, featuring a sinusoidal time dependence, ruled by the parameter
, and a linearly increasing amplitude along the building height, governed by the parameter
,
i.e. with
. Therefore, the parameter vector
looks sufficient to fully describe the loading conditions. A uniform probability density function was associated with each parameter:
for
, and
for
. Regarding the structural properties of the building, the same values of mass
and interstory stiffness
have been assumed for the two floors. Consequently, the resonance frequencies of the building are
, while the structural periods are
.
A dataset, collecting MTSs, has been assembled to train the AE and r; 4000 additional MTSs, forming the validation set, have been then employed to avoid overfitting. The training dataset is processed several times, or epochs. If the loss function computed with the validation set has not reduced for 50 epochs in a row, the training has been early stopped. A test set, gathering 512 MTSs, has been then employed to verify the reconstruction capacity of the AE, and the performance of the proposed load identification procedure. The reconstruction capacity has been evaluated through two error measures, employing either a standardised norm or a standardised norm. The error measures have been computed for each reconstructed signal, and standardisation has been done by dividing the reconstruction error (either the or norm) by the standard deviation of the original signal. Without standardisation, small inaccuracies in reconstructing large displacements would have counted more than large inaccuracies at smaller scales.
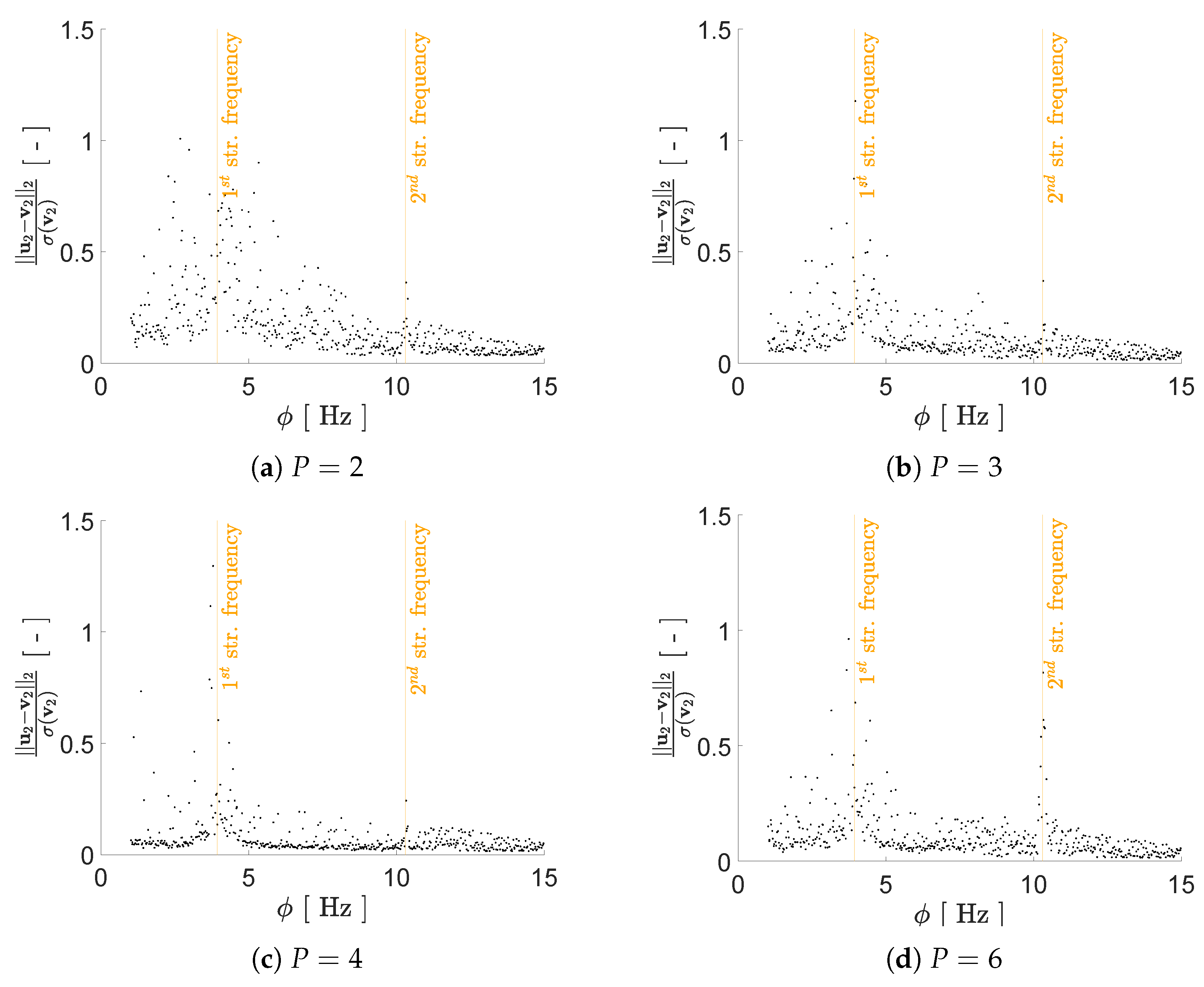
A thorough investigation has been carried out to study how the number
P of latent variables and the parameter
ruling the time dependence of loading, affect the reconstruction capacity of the AE; the other way around, no correlation between the reconstruction error and
has been found in our experiments. Indeed, the mean value and the spread of the reconstruction error can not be modelled as a function of
, but rather as a function of
.
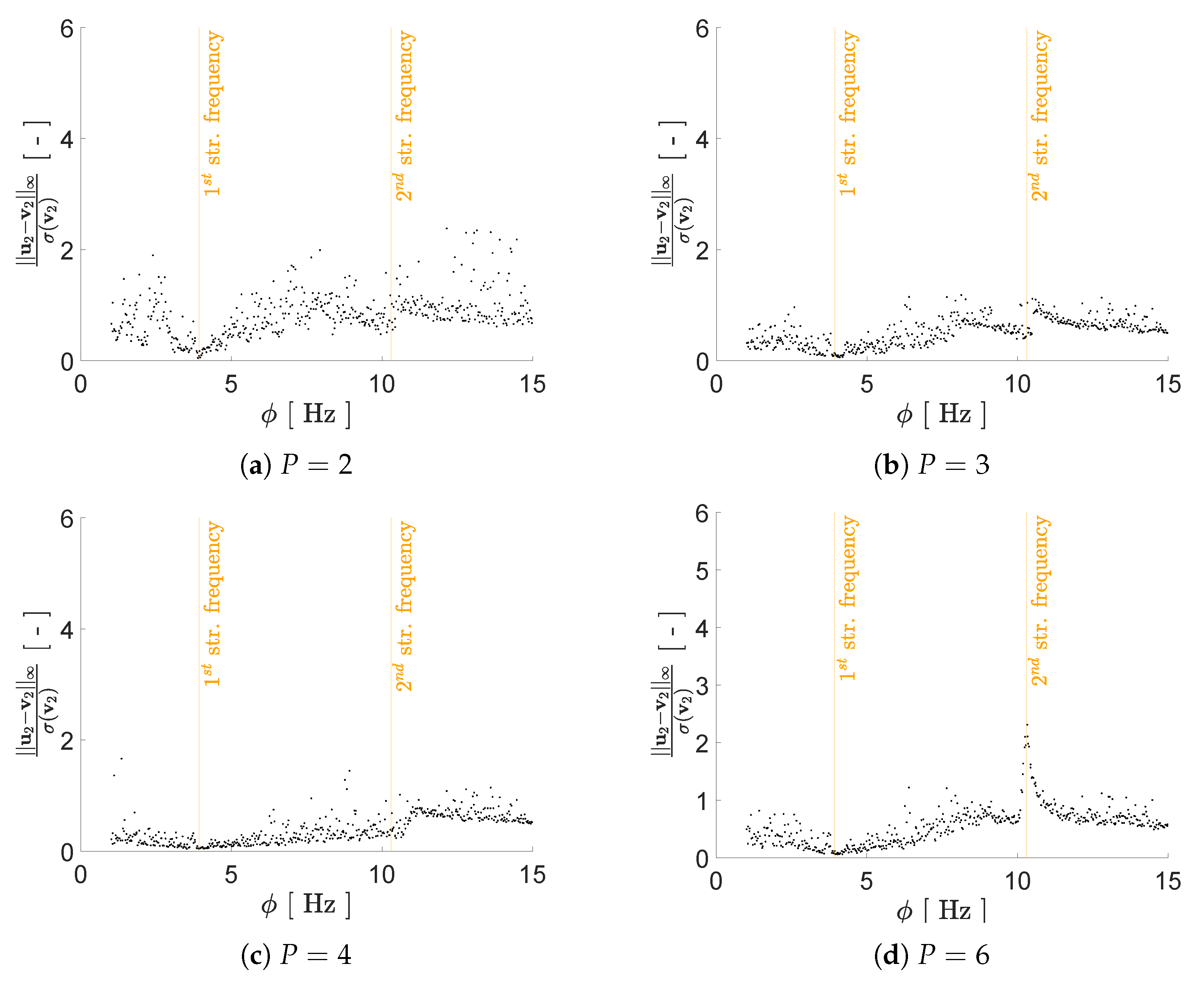
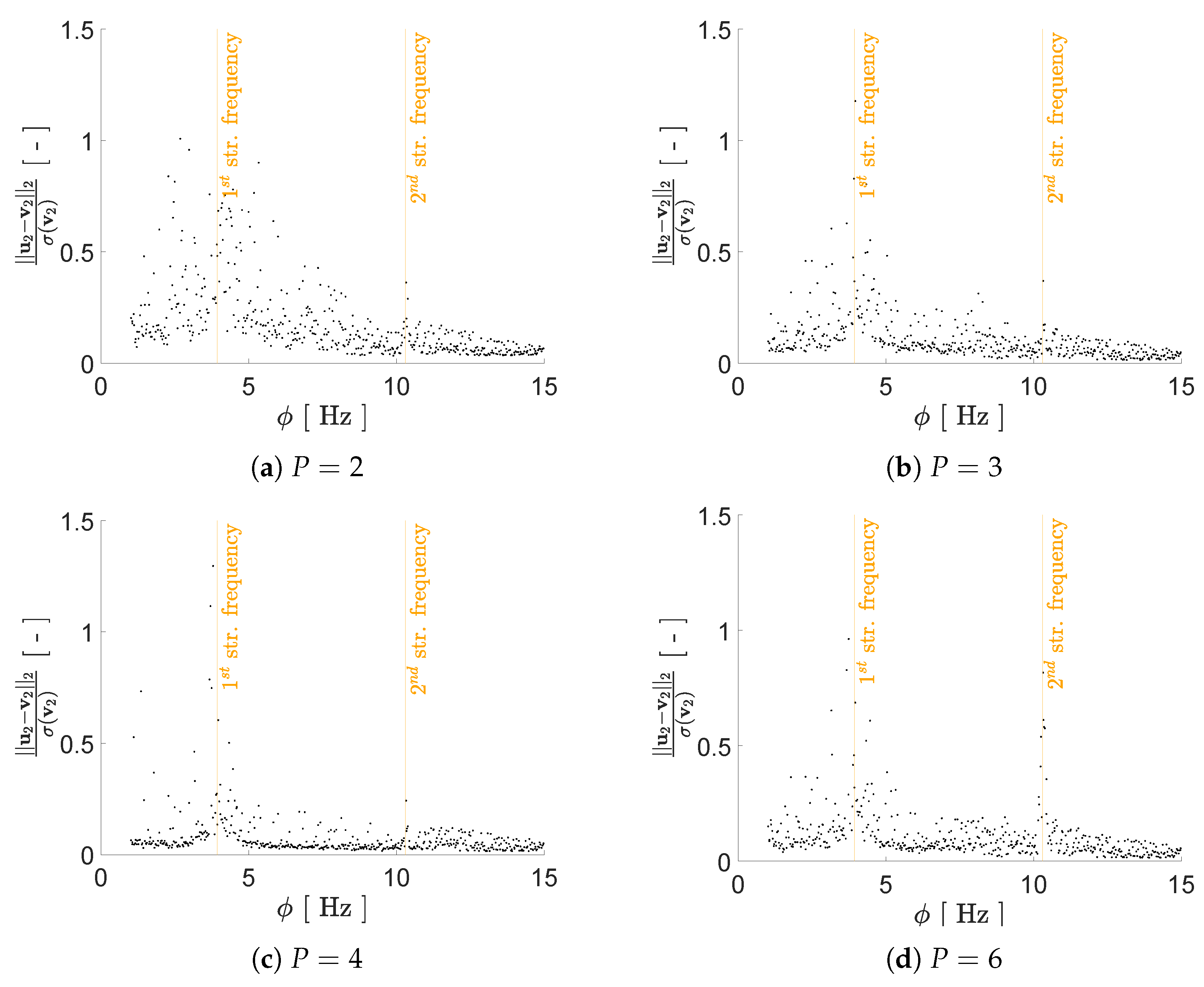
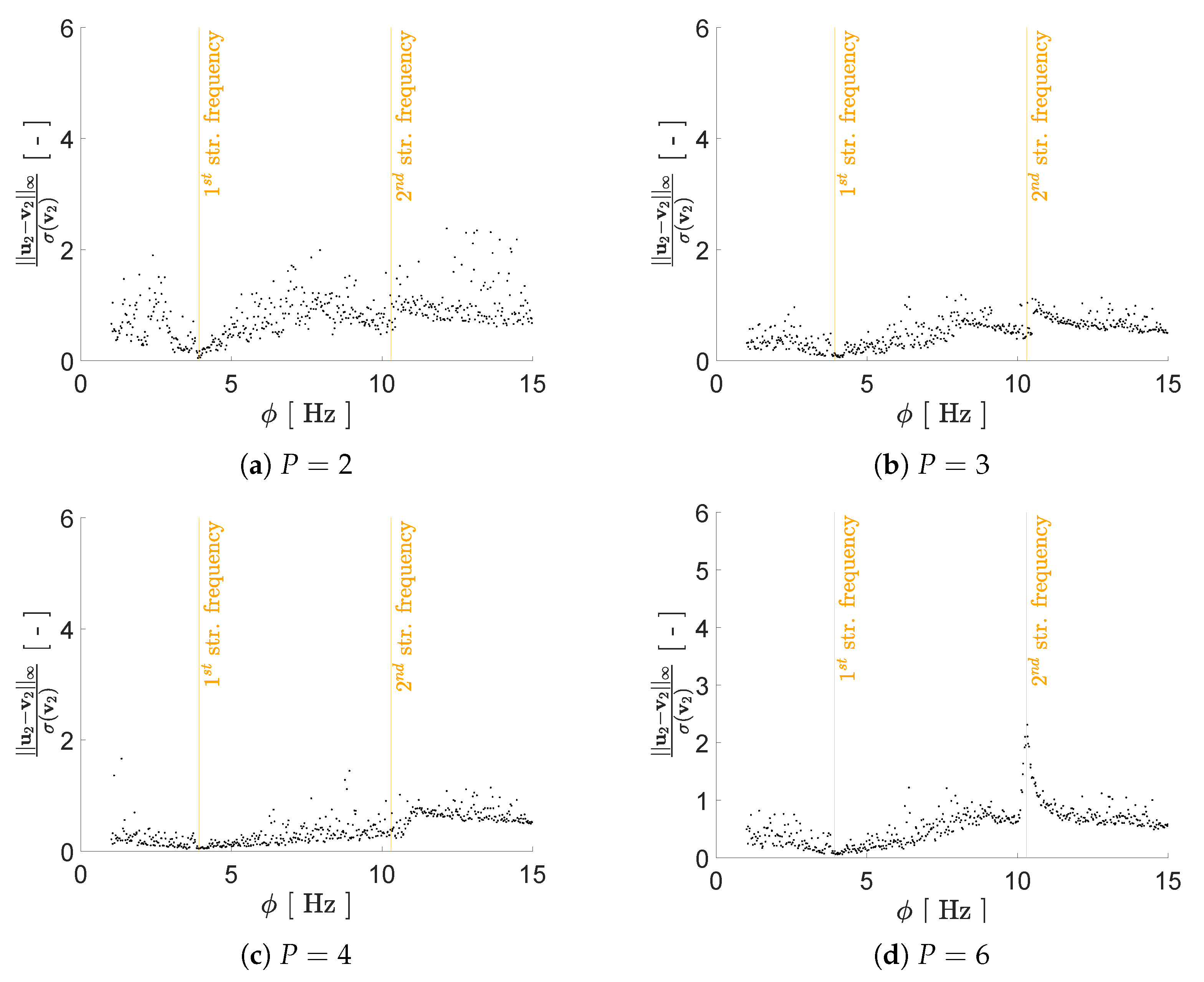
Figure 3 and
Figure 4 depict the reconstruction error measured, respectively, by the standardised
and
norms, when the input signals have been taken from the test set. The graphs for
(not reported for brevity) are analogous to those obtained for
, even if showing slightly higher values of the reconstruction error. An increasing value of
P does not lead to a monotonic enhancement of the AE reconstruction capacity, despite the intuition that a larger latent space should make reconstruction easier. Indeed, even if increasing the value of
P has not led to retain more information on the system, we do expect that a more redundant representation should not be detrimental.
A clear relation between the error and can be underlined. Looking at the standardised norm, the reconstruction capacity of the AE seems worse when and . This result is not surprising: the beats produced in the displacement recordings, when is close to the structural frequencies of the building, are additional signal characteristics that the AE must struggle to account for. Focusing on the standardised norm, the reconstruction error is still large for , while it gets smaller for .
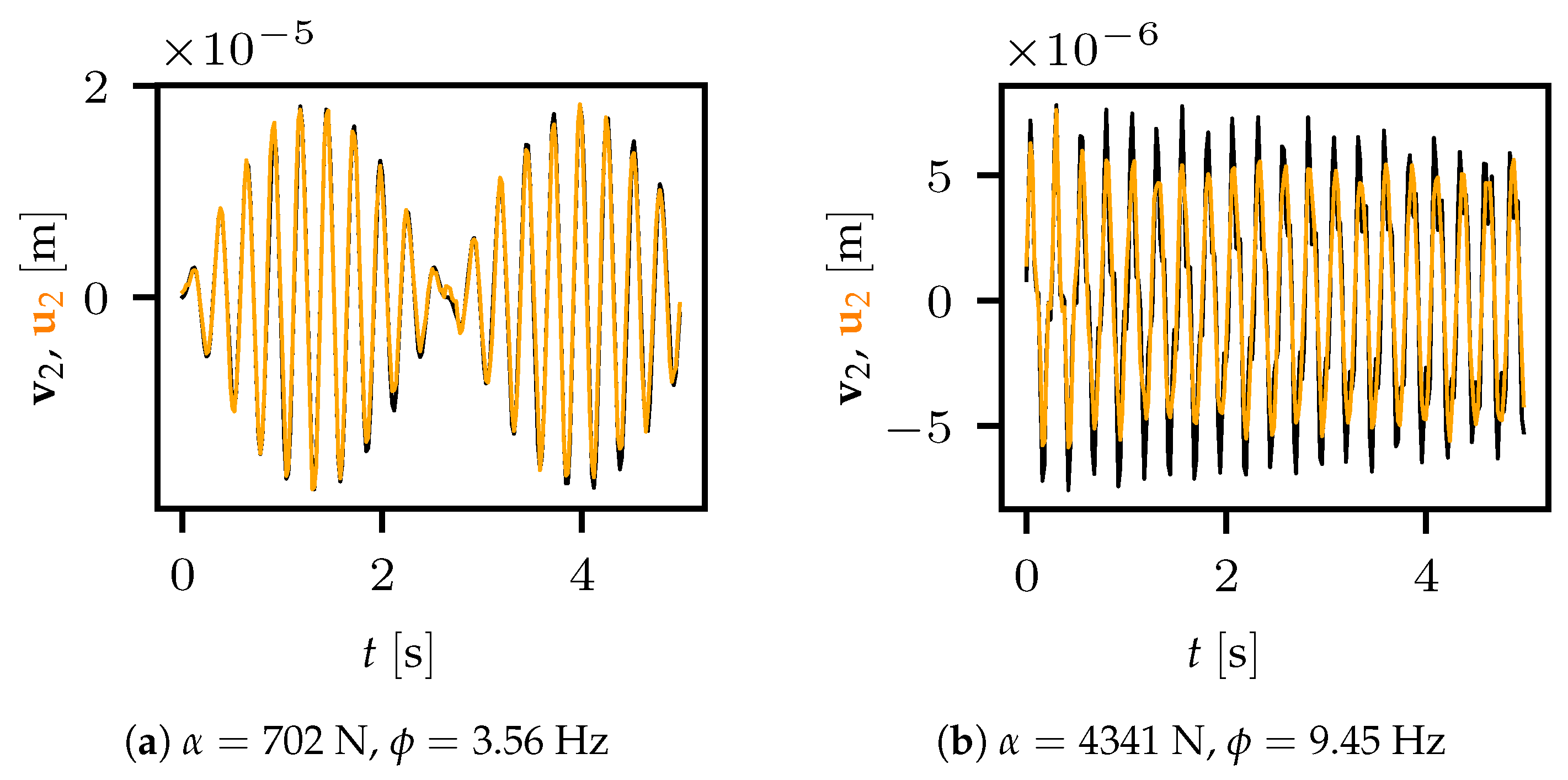
In
Figure 5, a qualitative assessment of the reconstruction capacity of the AE is reported, to better highlight the meaning of the two error norms: the good signal reconstruction obtained for
points toward the
norm as a more appropriate error measure. On the other hand, we are convinced that both these error measures give meaningful information, because the standardised
norm addresses inaccuracies in reproducing the frequency content of the input signal, while the standardised
norm highlights the inability of catching its peaks. Still referring to
Figure 5, we observe that the amplitude of the signal in
Figure 5a is an order of magnitude greater than the one in
Figure 5b, despite
in the first case, and
in the second case. The reason is that we are exciting an undamped dynamic system with
closer to
in
Figure 5a than to
in
Figure 5b.
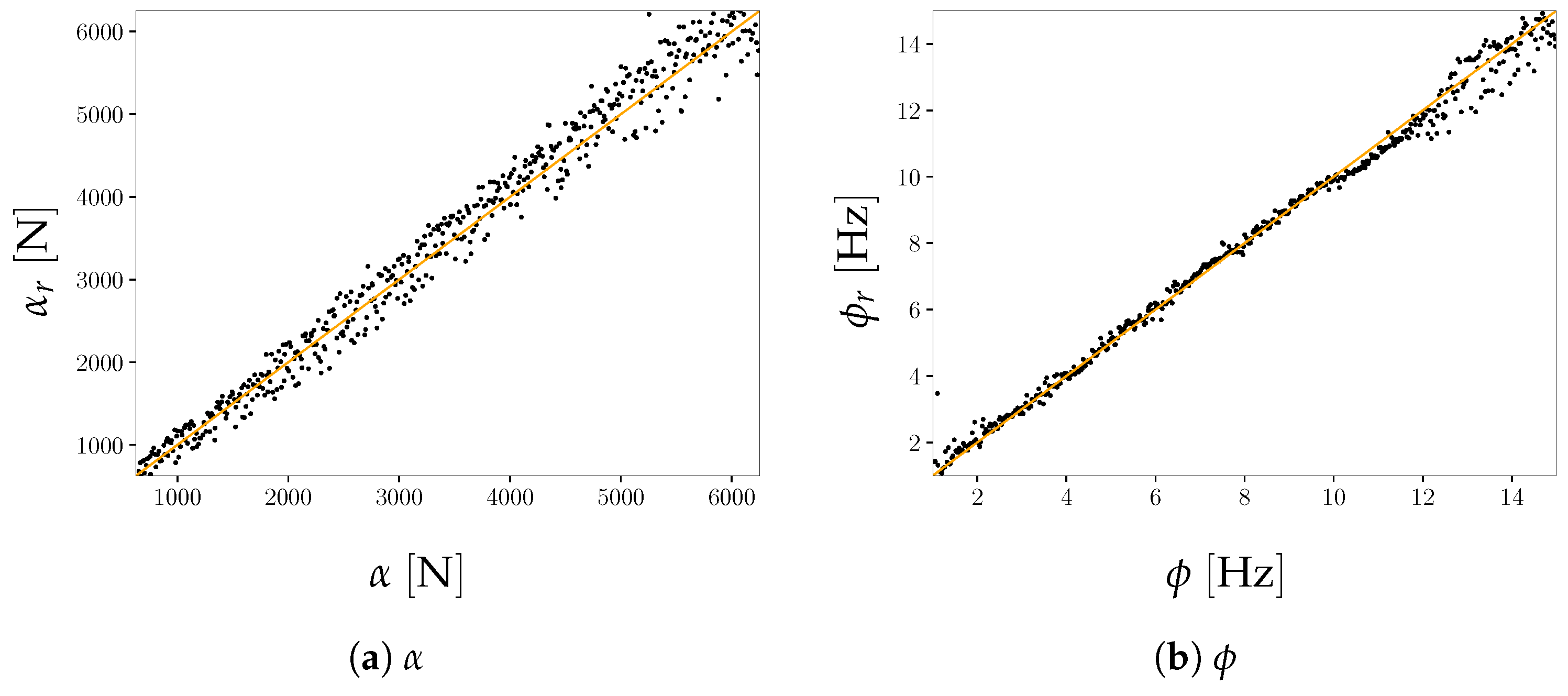
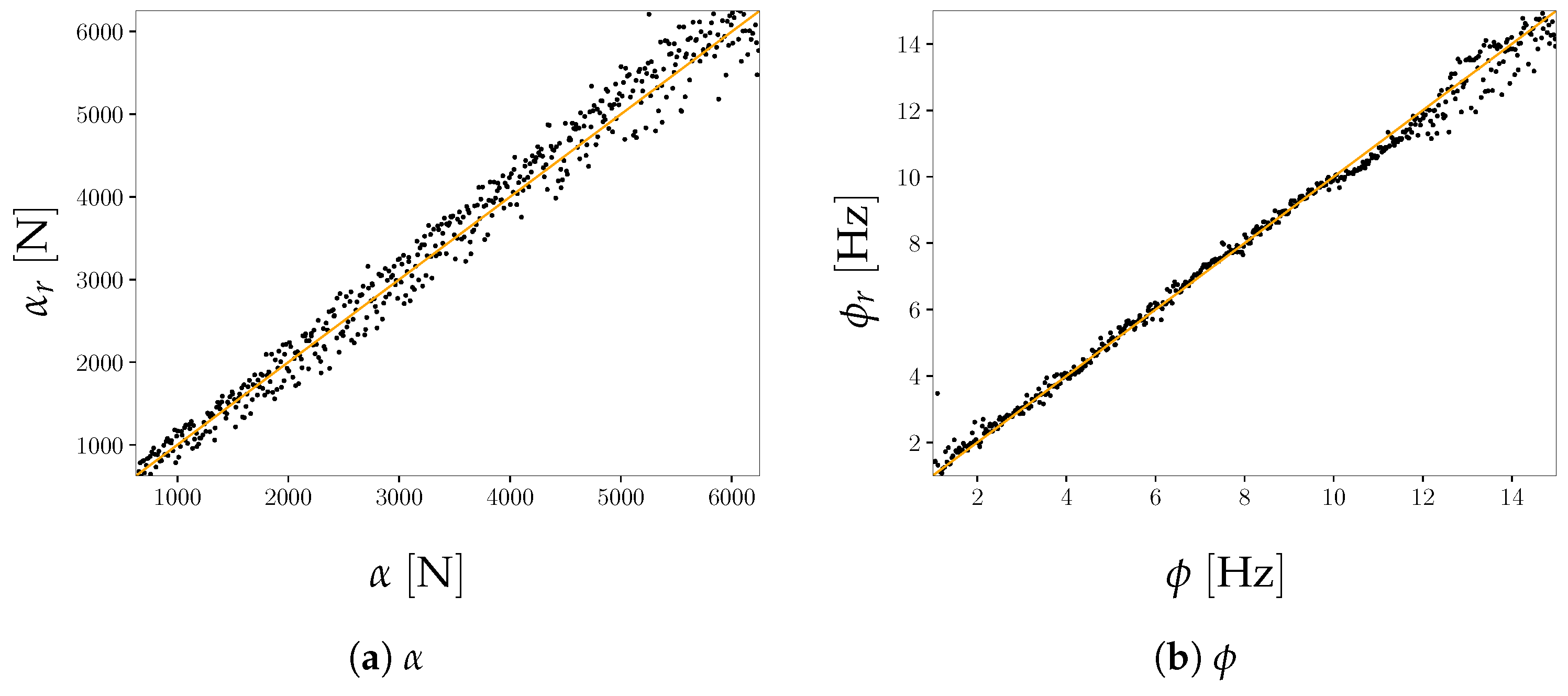
On the basis of the obtained latent representation
, we performed the regression of the parameters
governing the loading conditions. As shown in
Figure 6b, the regression of the load frequency
has been rather successfully accomplished: the graph has been obtained with the latent space dimension featuring the highest reconstruction capacity, linked to
. An analogous result has been obtained for the regression of the load amplitude
, shown in
Figure 6b, confirming that the proposed strategy, involving dimensionality reduction of the input and the use of a regression model, allows a correct load identification for the case at hand. It is also worth mentioning that the largest errors in the
prediction have been obtained for the frequency range featuring the highest reconstruction error in the
norm.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}