Abstract
The combined action of Machine Learning and the control system algorithm is proposed in this Renewable Energy System. The reason for proposing this Renewable Energy System is because it is a clean energy source from nature and it is free of cost. Here, the Renewable Energy system includes the Solar PV. This energy system has a higher scope of installation in most countries. For that, we propose a controller which achieves high performance and Guarantees Stability. In this proposed system, the disturbance and Uncertain parameters are considered both internal and external parameters. To overcome this problem, the Robust Control design is already implemented in the Control Engineering Field to attain System Stability. Conversely, this proposed method is a new approach to examine the System Stability by combining Machine Learning Gaussian Process Regression (MLGPR) with the Robust H-infinity Controller. The approach used in Machine Learning-GPR consists of gathering data of the initial system and gradually decreasing the Uncertainty, which results in an improvement of the performance. Finally, ML-GPR learns a model with Uncertainty bounds. We combined the model with a Control Framework (i.e., H-infinity Controller) that Guarantees Stability for this uncertain model. The design Environment used for the experimental verification is MATLAB/Simulink software. The Simulation Results confirmed the effectiveness of the newly proposed Control Strategy.
1. Introduction
An alternating source for Non-renewable sources of energy is Renewable energy, which is eco-friendly. Even though the design of Renewable Energy Resources is more effective, the Stability, Control and Efficiency need to be significant, since its control and operation are challenging. The control methods for enhancing stability in Renewable energy system is a complex issue and major research efforts are increasing in the research community. Solar PV Systems are commonly installed in most countries [1].
Robust control techniques are mainly proposed to address the control and stability problems. The major Robust Control methods include H-infinity, H2 norm, etc. The System Uncertainty and Disturbance are considered in designing H-infinity Controller [2].
The Robust Control Techniques combined with Machine Learning Algorithm can provide Robust Stability and Guarantees performance. The approach uses H-infinity Controller design and Gaussian Process Regression (GPR) for the design of Machine Learning-based Robust Control. This method combines a robust control framework with online learning to Guarantee Stability through gradually improving performance. Finally, the designed Gaussian Process (GP)-based H-infinity Controller will Guarantee Stability for all Uncertainties learned by the GP model from the Nominal system with uncertainty signal [3].
This paper proposed the Machine Learning Gaussian Process Regression (MLGPR) based Robust Control Framework that Guarantees Stability through improving performance for all the Uncertainties in the Solar PV System.
2. Modeling of Solar PV System
The Photovoltaic cell is efficient in generating Electrical Energy from Solar Radiation (photon of Lights). This power generation is achieved through the PV modules, which include structured PV cells enclosed with laminated protection [4]. Solar PV systems include PV strings that are split into a number of strings connected in parallel and strings that have to be connected in series connections based on the determined Power Generation [4].
The Solar Panel Connected Parallel will generate the amount of Current and connections in Series will be determining the Voltage of the solar farm [1]. One string connected in Parallel will generate a Current of 7.35 Amps; similarly, the Series-connected string will generate about 29 V In this model, 17 strings are connected in Parallel, which generates 124.95 Amps, and 14 strings in Series, which contain about 406 V of Voltage. The total Power rating of this PV system is 50 kW, as illustrated in Figure 1, which shows the Configuration of the Solar PV System. The MPPT and MPC for the Solar PV System are explained in Section 2.1.
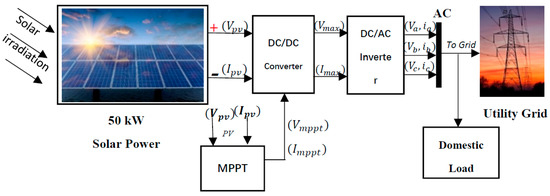
Figure 1.
Configuration of the Solar PV System.
2.1. MPPT and MPC for the Solar PV System
The Maximum Power Point Tracking and Model Predictive Control algorithm are combined to provide a Dynamic performance for the Boost converter. The Maximum Current tracked by the MPPT algorithm is given as the reference Current to MPC for Current control purposes and also to eliminate the overshoot and undershoot present in the PV system that occurs due to the variation in the Radiation or Temperate change [5]. The MPC algorithm mainly acts by reducing the error value in the control parameter. The major two functionalities of MPC can be specified as Prediction and the Reducing error value. For all the voltage, the Current value is tracked by reducing the error value. This MPC in most cases uses tracking by comparing the reference with the measured value, since it is quite different from other methods and it also provides a better dynamic capability. To extract the Maximum Power, the Perturb and Observe algorithm is implemented. In the MPPT model, the Current and Voltage values are calculated and the reference Current is given to the MPC algorithm. Initially, it starts with measuring the Power parameters and reference values of the Voltage and Current. After the MPPT, MPC action take place, which initializes the parameters and minimizes the cost function. This MPC is an effective method for current control based on MPPT reference [6].
2.2. Solar I-V and P-V Characteristics
The characteristics of Current and Voltage (V-I) and Power and Voltage (P-I) in Figure 2, detail the Series modules and Parallel strings that are connected in the Solar PV farm as in Section 2. The PV module used in the simulation is 1Soltech 1STH-215-P; this term indicates the manufacturer and model name of the PV module. The I-V characteristics show the value of the voltage value of the current; similarly, the P-V characteristics show a total Power of 50,000 W generated by the PV panel, with a Voltage of 406 Volts. For the PV panel, the highest input Solar irradiation value at a time range of 2.2 min was about 1000 (W/m2).
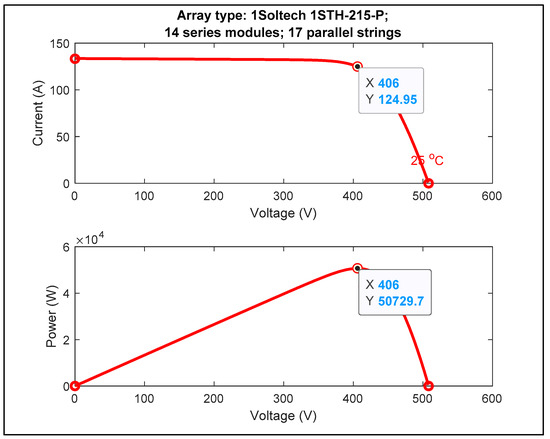
Figure 2.
Characteristics of I-V and P-V of the Solar Energy System.
3. MLGPR based Robust H-infinity Controller Design
The Machine Learning Gaussian Process Regression-based Robust H-infinity Controller framework is illustrated in Figure 3. Initially, the GPR Model is trained to obtain the input data based on the target values. Here, the nominal system considered is the Solar PV System as in Section 2. The PV DC Bus Voltage is considered to be the input data and the real value of the PV DC Bus voltage is the Target Value. The input and Target data are trained as explained in Section 3.1. The Specified Loss Function selected is the Mean square Error, which is used to calculate training losses in the data, and finally, the model obtains the data. The predicted values will have fewer error values. These predicted values of the PV DC Bus Voltage are given to the Robust H-infinity Controller, as detailed in Section 3.2, which helps to attain robust stability.
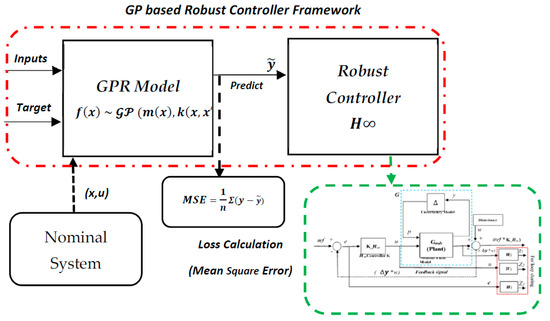
Figure 3.
Configuration of MLGPR based Robust H-infinity Controller.
3.1. Machine Learning GPR Model
The Machine Learning algorithm GPR model falls under the specialization of Supervised Learning. Supervised learning has been further categorized into Regression and Classification techniques. The Classification method is used to classify the input data with its discrete labels and Regression are mainly used to predict the continuous data values [7]. Here, the Gaussian Process is considered with nonparametric regression, which does not analyze prediction in a predetermined form; rather, it makes predictions based on the input data. For the GPR model, the training datasets are defined as follows: {D = (xi, yi)}, where i = (1,2,3,…,n) is a sequence of data values and x and y denote the input vector and scalar targets or ground truth, respectively. All the input vectors of n values are collected in X and scalar targets value y as Y, respectively. The Input Data X has with noisy or mismatch data values, while target or ground truth Y has the real values of the system, which are further given to the GPR model for the training process.
In general, the Gaussian process is defined by mean function m(a) and covariance function k (a, a′) of real function f(a) as in [7]:
where a is the input data, a′ is transpose of input data, and are the function and mean variance of input data a. The term denotes expectation, for example, Eq(a)[z(a)], which means expectation z(a) when x ~ q(a). From the above two Equations (1) and (2), the Gaussian Process () can be written as follows [7]:
The Gaussian function includes the mean and covariance function as given in Equation (3) of the input data. The Input data are given to the Gaussian field, then the function compares these data with observation data (target data) and reduce the variation in the input values by computing the mean and covariance, which is further taken as a kennel function by GP for their input data.
3.2. Robust H-Infinity Controller
The H-infinity Controller gives Robust Stability and improves good performance by rejecting high disturbance and Uncertainties signals. It shows better performance compared to the traditional Control methods, because the H-infinity controller is able to solve the problems involved in multivariate systems [3].
For H-infinity, Controller design is carried out by obtaining the State Space model for a Solar PV System, where the state space model is used to define the Controller Plant G. Here, the controller Guarantees Stability for the signal from the predicted values of the ML-GPR model by reducing the possible uncertainty signals, as detailed in Section 4. The Parametric uncertainty signal considered in this solar PV system is the Solar Irradiation.
4. Simulation Results
Figure 4a shows that the Solar Irradiation input signal to the Solar PV panel has a range of 1000 Watts per square meter, for which the panel generates a Power of 50 kW. The Irradiation signal, as shown in Figure 4a, includes the variation in the signal for a smaller range. Figure 4b represents the PV Current Iabc, which is obtained with the reference current value. This maximum current is obtained for the input solar irradiation signal to the PV panel. It reaches a maximum current value of 120 A at a time period of 2 to 2.5 s with values similar to the reference current (I_ref).
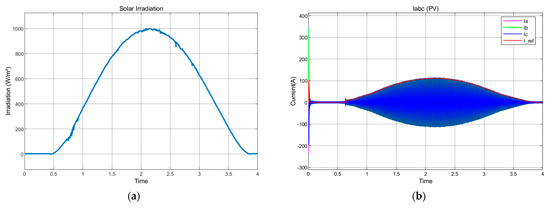
Figure 4.
(a) Solar Irradiation in Watts per unit area (W/m2); (b) PV Current (Iabc and Ref Current).
The PV Power (Ppv) and Maximum Power Point tracking comparison plot are given, in which the Ppv has more variation in power, but even though it can attain maximum power, as shown in Figure 5a, the red color line represents the MPPT algorithm and the green line is the PV Power value. In Figure 5b, the DC Bus Voltage of the Solar Energy Source is in the range of 800 Volts. It could include some undershoot and overshoot at the initial of the DC bus voltage, and the voltage can reach 800 V in 0.8 s. This signal is also found with some fluctuations, which are reduced by the proposed method, as shown in Figure 6.
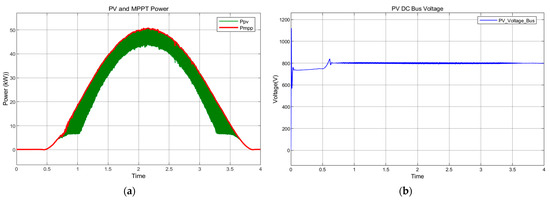
Figure 5.
(a) Solar PV and Maximum Power Point Tracking Power comparison; (b) Solar PV DC bus voltage.
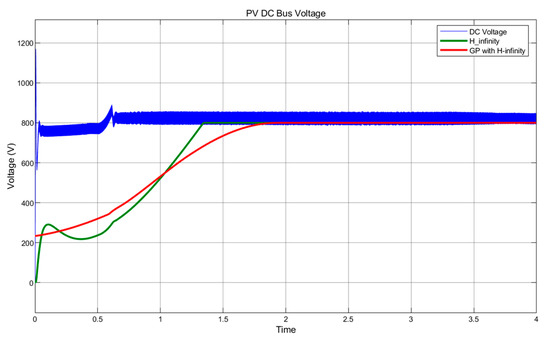
Figure 6.
Proposed ML-GPR-based Robust H-infinity Controller response.
Figure 6 shows PV DC Bus Voltage and the plot includes the response of H-infinity and GP with the H-infinity Controller response. The Initial PV DC Voltage Signal has a higher range of Overshoot at the initial stage, and the variation in the signal occurs due to the Uncertainty signal given to it. For this Uncertainty Signal, the H-infinity Controller can able to Control the Uncertainty, but overshoot was found in the signal at 0.04 s and undershoot was found at 0.5 s. It attains a stable performance by giving a voltage of 800 V at 1.48 s. The proposed GP with a H-infinity Controller can reduce the undershoot and overshoot which is present in the H-infinity Controller response. This Proposed Controller can give Robust stability and improves performance by smoothly converging to the Voltage range of 800 V.
5. Conclusions
In this proposed method, a Machine Learning-based Robust control algorithm is designed to achieve high performance and Guarantee Stability. The results were verified by using MatLab R19a/Simulink Software. From the results, it is clear that the Gaussian Process Regression-based H-infinity Controller can guarantee Robust Stability and improve performance more than a conventional H-infinity Controller.
Author Contributions
Conceptualization, methodology were done by S.S.P.; M.B.Y.; P.M.; K.S.; software, validation and formal analysis, N.D.; R.D.P.; J.B.P.; writing—original draft preparation, S.S.P.; N.D.; R.D.P.; writing—review and editing, S.S.P.; J.B.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The Machine Learning model is deigned from this reference link: https://in.mathworks.com/help/stats/gaussian-process-regression-models.html.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nasr, M.A.; Nasr-Azadani, E. System performance in microgrids based hybrid PV systems. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar]
- Habib, H.U.R.; Wang, S.; Aziz, M.T. PV-Wind-Battery Based Standalone Microgrid System with MPPT for Green and Sustainable Future. In Proceedings of the 2019 9th International Conference on Power and Energy Systems (ICPES), Perth, WA, Australia, 10–12 December 2019. [Google Scholar]
- Berkenkamp, F.; Schoellig, A.P. Safe and robust learning control with Gaussian processes. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015. [Google Scholar]
- Muhtadi, A.; Saleque, A.M. Modeling and simulation of a microgrid consisting solar PV & DFIG based wind energy conversion system for St. Martin’s island. In Proceedings of the 2017 IEEE 3rd International Conference on Engineering Technologies and Social Sciences (ICETSS), Bangkok, Thailand, 7–8 August 2017. [Google Scholar]
- Güler, N.; Irmak, E. MPPT Based Model Predictive Control of Grid Connected Inverter for PV Systems. In Proceedings of the 2019 8th International Conference on Renewable Energy Research and Applications (ICRERA), Brasov, Romania, 3–6 November 2019. [Google Scholar]
- Irmak, E.; Güler, N. A model predictive control-based hybrid MPPT method for boost converters. Int. J. Electron. 2020, 107, 1–16. [Google Scholar] [CrossRef]
- Williams, C.K.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2, pp. 7–22. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).