
Backstepping Control of Drone †


Abstract
:1. Introduction
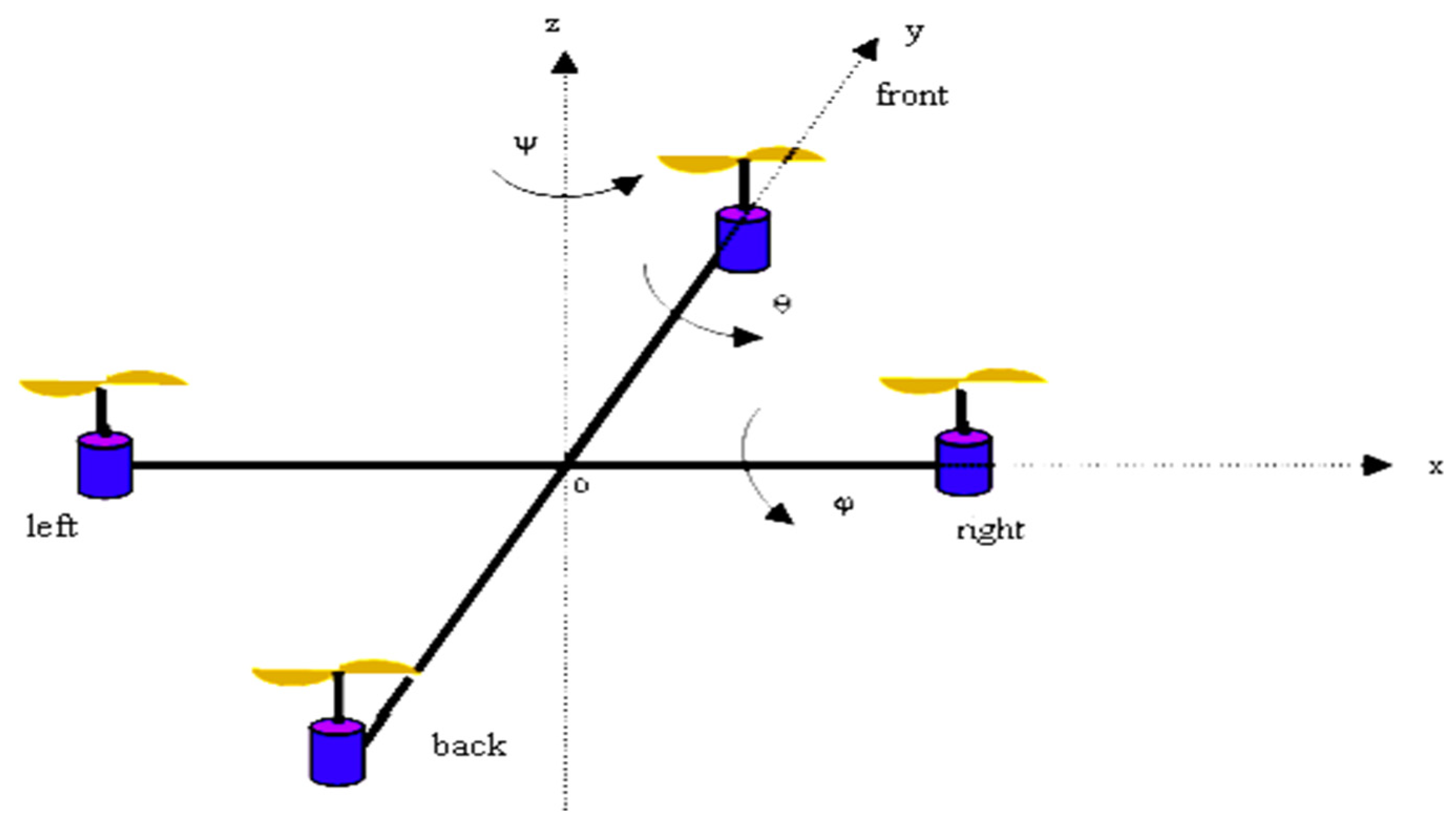
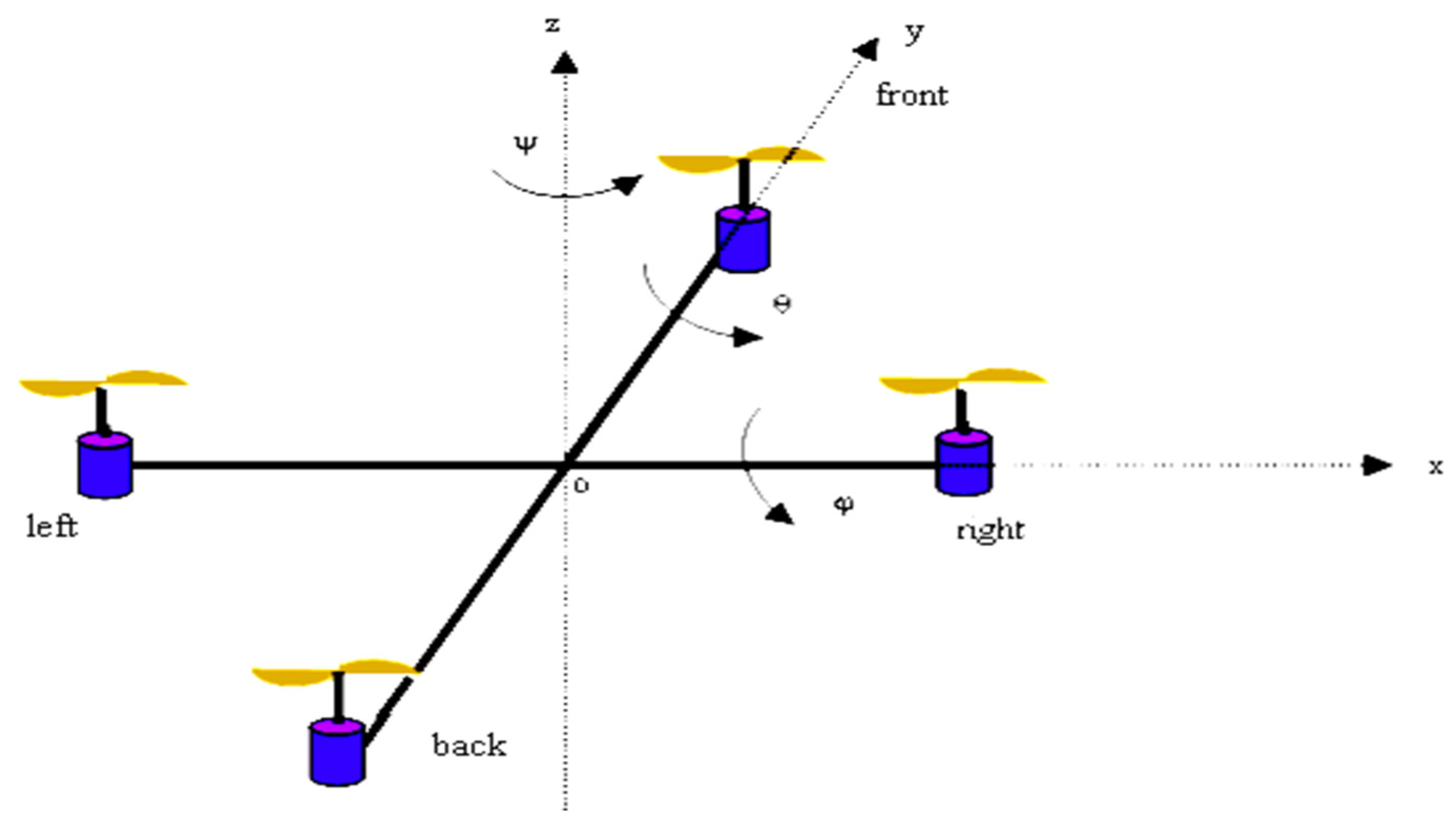
2. Quadrotor Dynamic Modeling
2.1. Drone Dynamic Model
2.2. State-Space Model
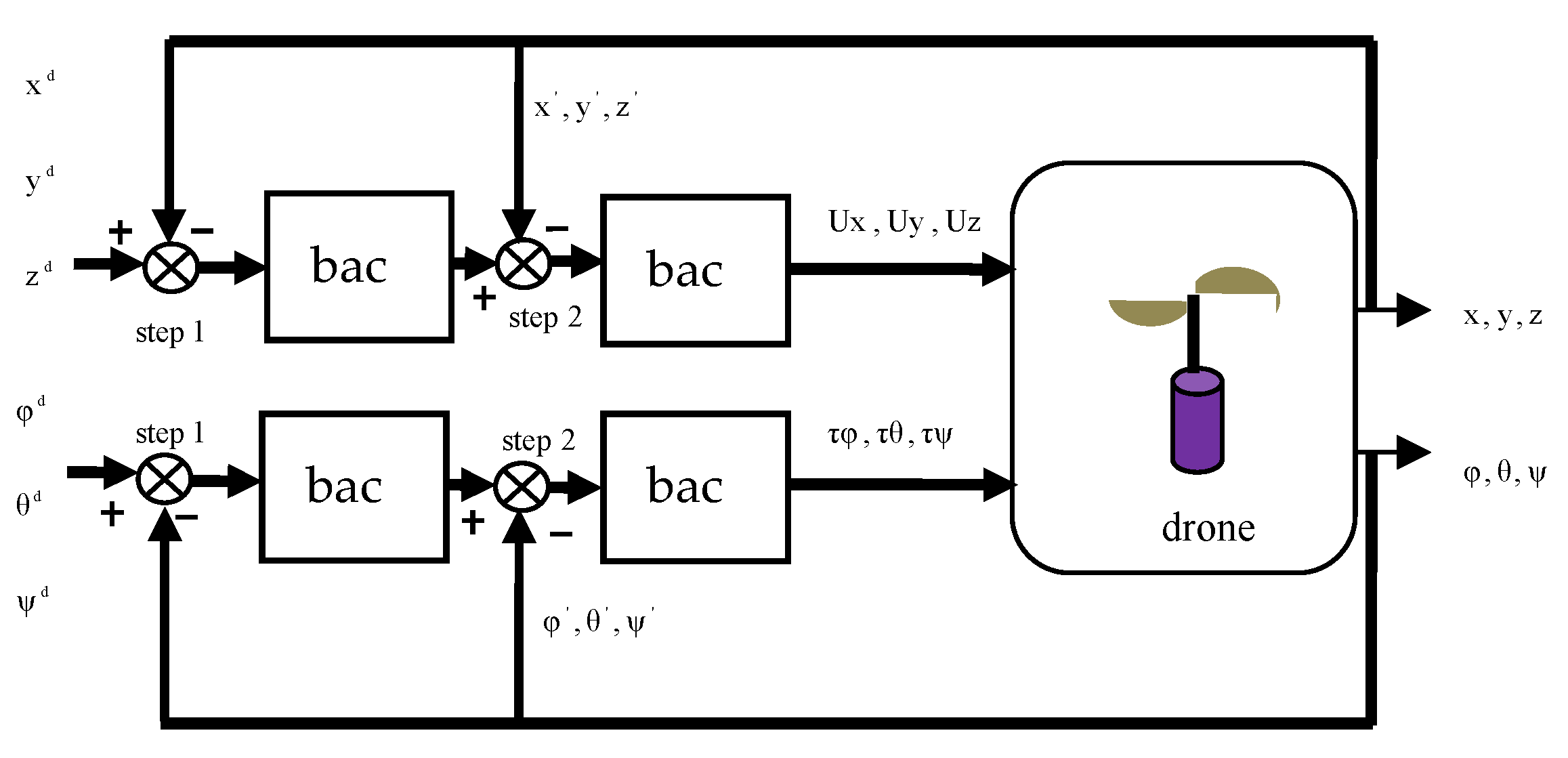
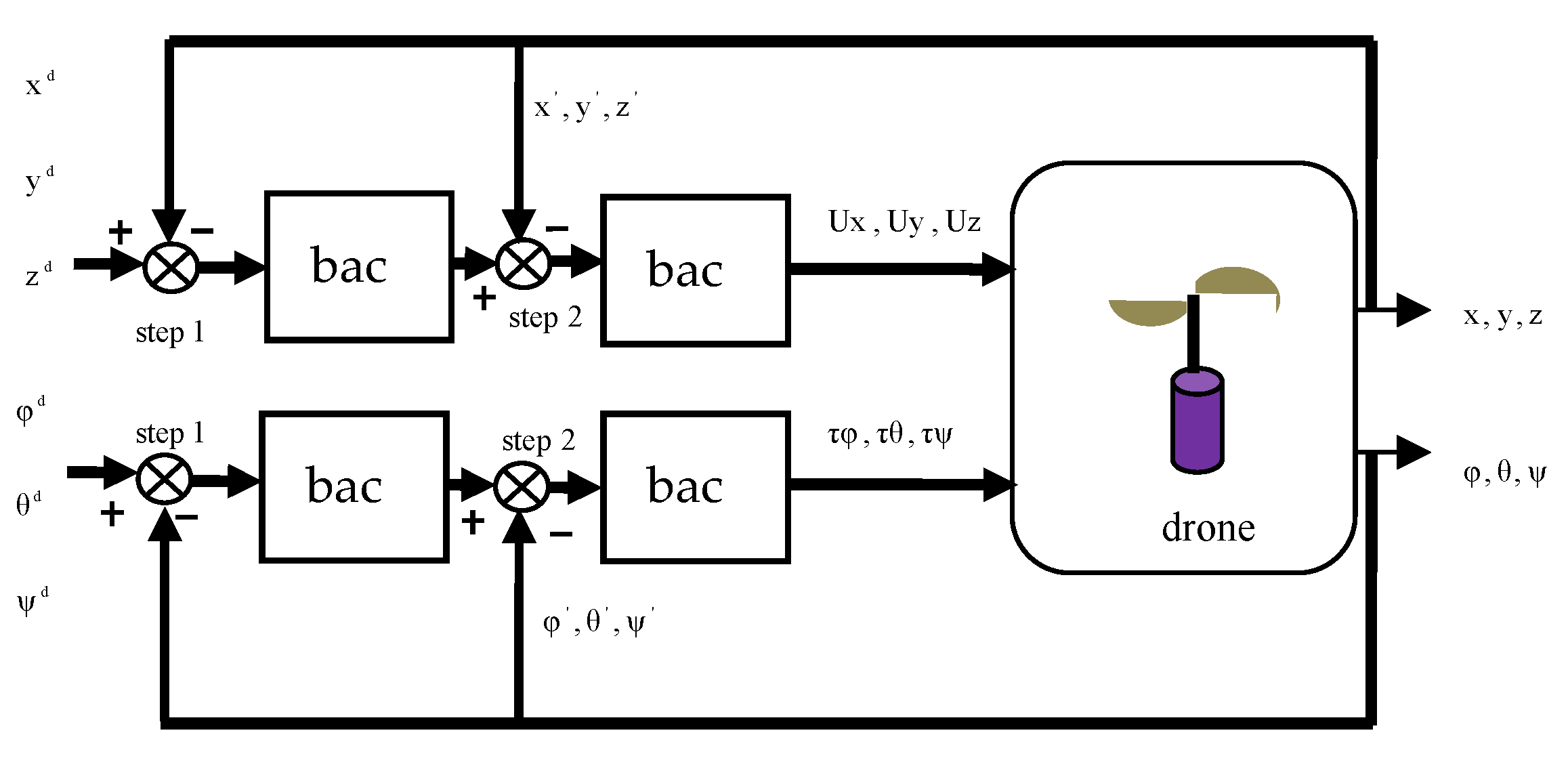
3. Backstepping Control of Drone
3.1. Control of the Angle φ
3.2. Control of the Angle
3.3. Control of the Angle
3.4. Control of the Position z
3.5. Control of the Position y
3.6. Control of the Position x
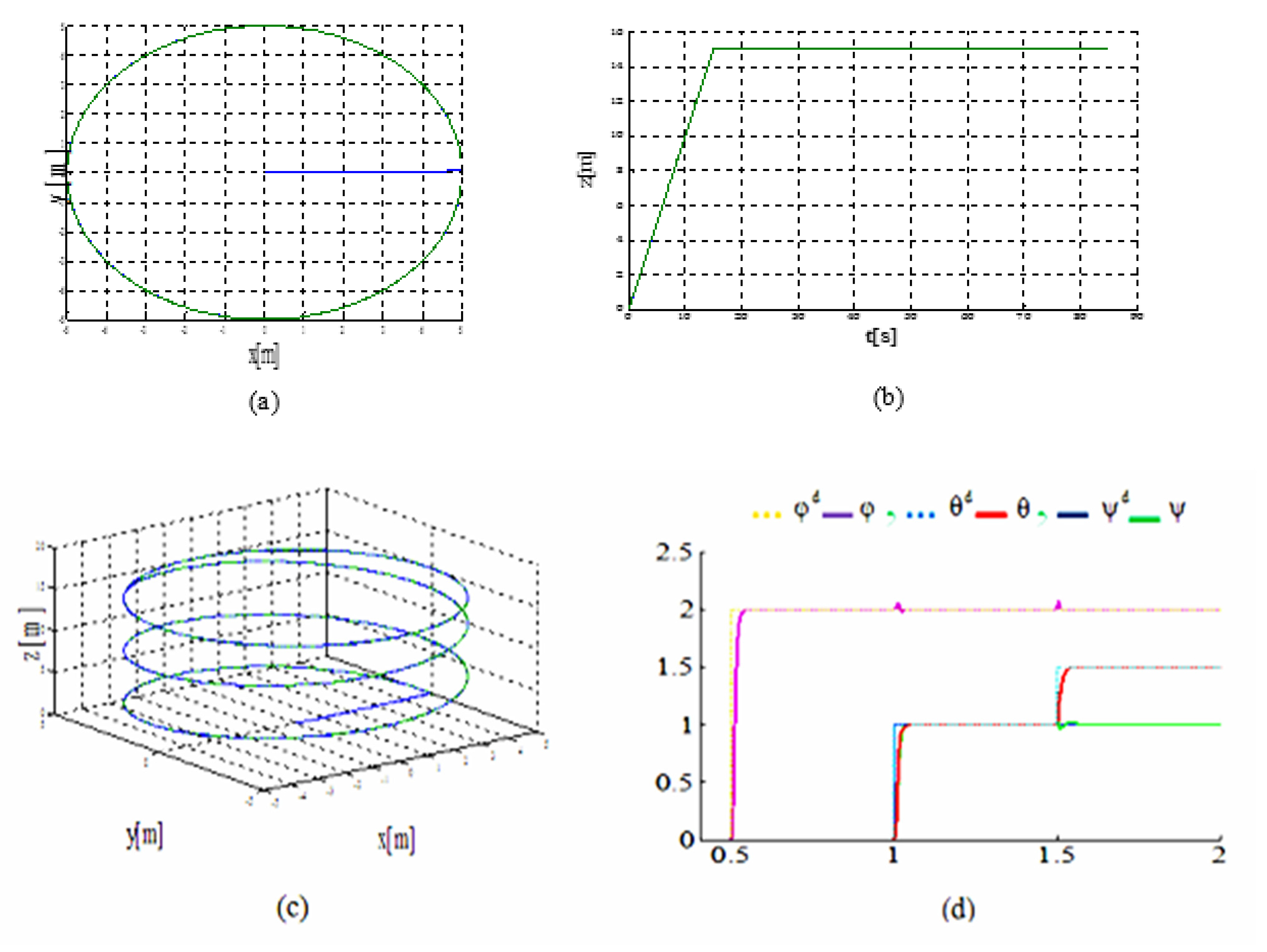
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Shahid, F.; Kadri, B.; Jumani, N.A.; Pirwani, Z. Dynamical Modeling and Control of quadrotor. Trans. Mach. Des. 2016, 4, 50–63. [Google Scholar]
- Tuan, L.L.; Won, S. PID based sliding mode controller design for the micro quadrotor. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 1860–1865. [Google Scholar] [CrossRef]
- Erginer, B.; Altug, E. Modeling and PD Control of a Quadrotor VTOL Vehicle. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 894–899. [Google Scholar] [CrossRef]
- Bouadi, H.; Bouchoucha, M.; Tadjine, M. Sliding Mode Control based on Backstepping Approach for an UAV Type-Quadrotor. World Acad. Sci. Eng. Technol. Int. J. Mech. Mechatron. Eng. 2007, 1, 2. [Google Scholar] [CrossRef]
- Zahran, S.; Moussa, A.; El-Sheimy, N. Enhanced Drone Navigation in GNSS Denied Environment Using VDM and Hall Effect Sensor. Int. J. Geo Inf. 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Labbadi, M.; Cherkaoui, M.; Houm, Y.E.; Guisser, M. Modeling and Robust Integral Sliding Mode Control for a Quadrotor Unmanned Aerial Vehicle. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference (IRSEC), Rabat, Morocco, 5–8 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Mohamed, H.A.F.; Yang, S.S.; Moghavvemi, M. Sliding mode controller design for a flying quadrotor with simplified action planner. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 1279–1283. [Google Scholar]
- Bouadi, H.; Cunha, S.S.; Drouin, A.; Mora-Camino, F. Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking. In Proceedings of the 2011 IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2011; pp. 449–455. [Google Scholar] [CrossRef] [Green Version]
- Bouabdallah, S.; Siegwart, R. Backstepping and Sliding-mode Techniques Applied to an Indoor Micro Quadrotor. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2247–2252. [Google Scholar] [CrossRef] [Green Version]
- Mian, A.; Daobo, W. Modeling and backstepping-based nonlinear control strategy for a 6 dof quadrotor helicopter. Chin. J. Aeronaut. 2008, 21, 261–268. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Kim, H.J.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control. Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- McKerrow, P. Modelling the Draganflyer four-rotor helicopter. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004 Proceedings. ICRA ‘04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3596–3601. [Google Scholar] [CrossRef] [Green Version]
- Hanani, N.; Syazwanadira, F.; Fakharulrazi, N.A.; Yakub, F.; Rasid, Z.A.; Sarip, S. Full Control of Quadrotor Unmanned Aerial Vehicle using Multivariable Proportional Integral Derivative Controller. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 447–452. [Google Scholar] [CrossRef]
- Wang, P.; Man, Z.; Cao, Z.; Zheng, J.; Zhao, Y. Dynamics modelling and linear control of quadcopter. In Proceedings of the 2016 International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, VIC, Australia, 30 November–3 December 2016; pp. 498–503. [Google Scholar] [CrossRef]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S.-E.-I. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Basri, M.A.M.; Noordin, A. Optimal backstepping control of quadrotor UAV using gravitational search optimization algorithm. Bull. Electr. Eng. Inform. 2020, 9, 1819–1826. [Google Scholar] [CrossRef]
- Hadjira, B.; Rabiai, Z. Decentralized Energy Management System Enhancement for Smart Grid. In Optimizing and Measuring Smart Grid Operation and Control; Recioui, A., Bentarzi, H., Eds.; IGI Global: Hershey, PA, USA, 2021; pp. 156–169. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Gravitational Acceleration | g | 9.8 m/s2 |
| Mass of quadrotor | m | 0.4794 Kg |
| Length of wings | l | 0.225 m |
| Rotational inertia | Jx Jy Jz | 0.0086 Kg m2 0.0086 Kg m2 0.0172 Kg m2 |
| Residual inertia | Jr | 3.740 × 10−5 Kg m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saibi, A.; Boushaki, R.; Belaidi, H. Backstepping Control of Drone. Eng. Proc. 2022, 14, 4. https://doi.org/10.3390/engproc2022014004
Saibi A, Boushaki R, Belaidi H. Backstepping Control of Drone. Engineering Proceedings. 2022; 14(1):4. https://doi.org/10.3390/engproc2022014004
Chicago/Turabian StyleSaibi, Ali, Razika Boushaki, and Hadjira Belaidi. 2022. "Backstepping Control of Drone" Engineering Proceedings 14, no. 1: 4. https://doi.org/10.3390/engproc2022014004
APA StyleSaibi, A., Boushaki, R., & Belaidi, H. (2022). Backstepping Control of Drone. Engineering Proceedings, 14(1), 4. https://doi.org/10.3390/engproc2022014004