
Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks †


Abstract
:1. Introduction
2. System Model
3. Downlink Coverage Probability Calculation
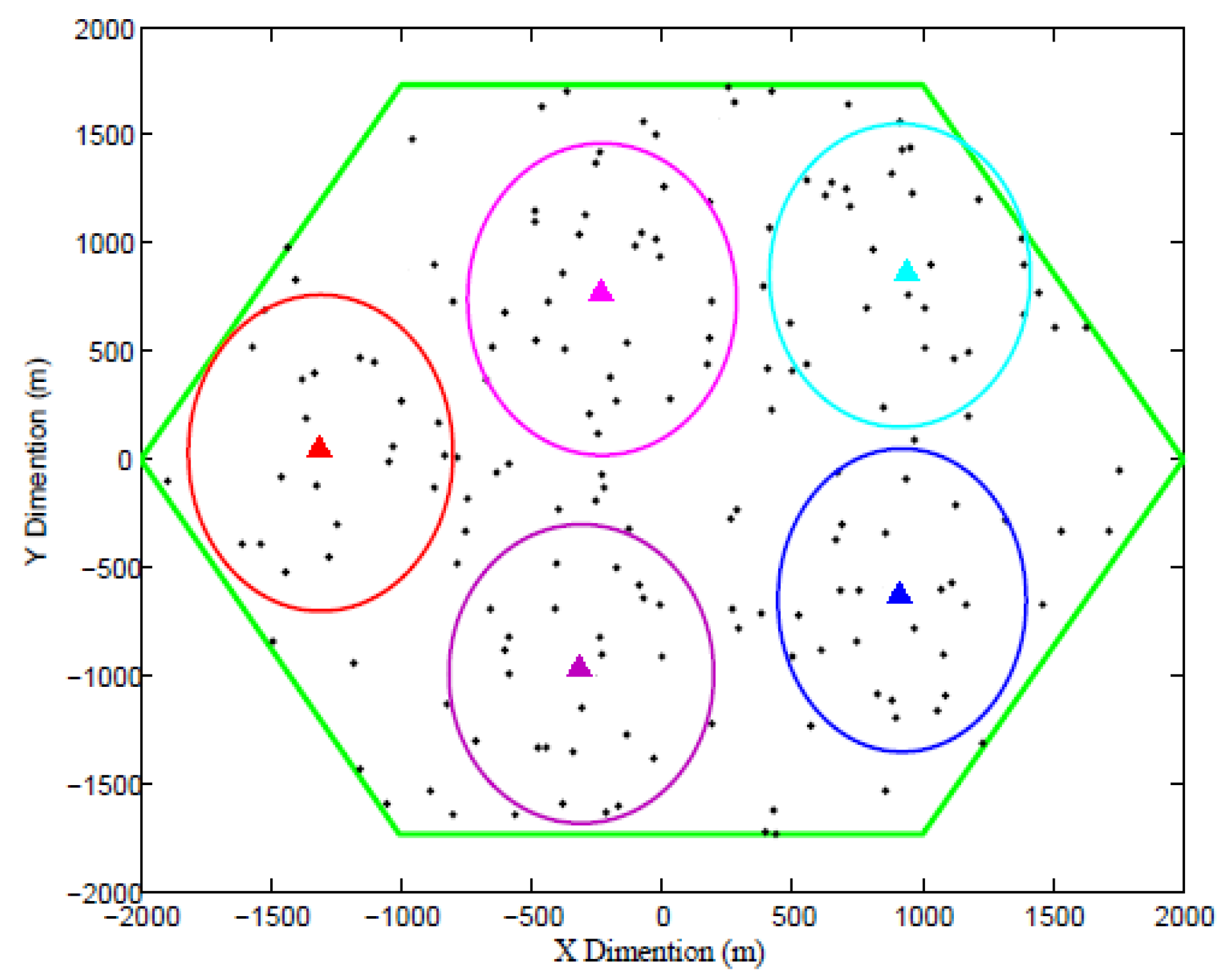
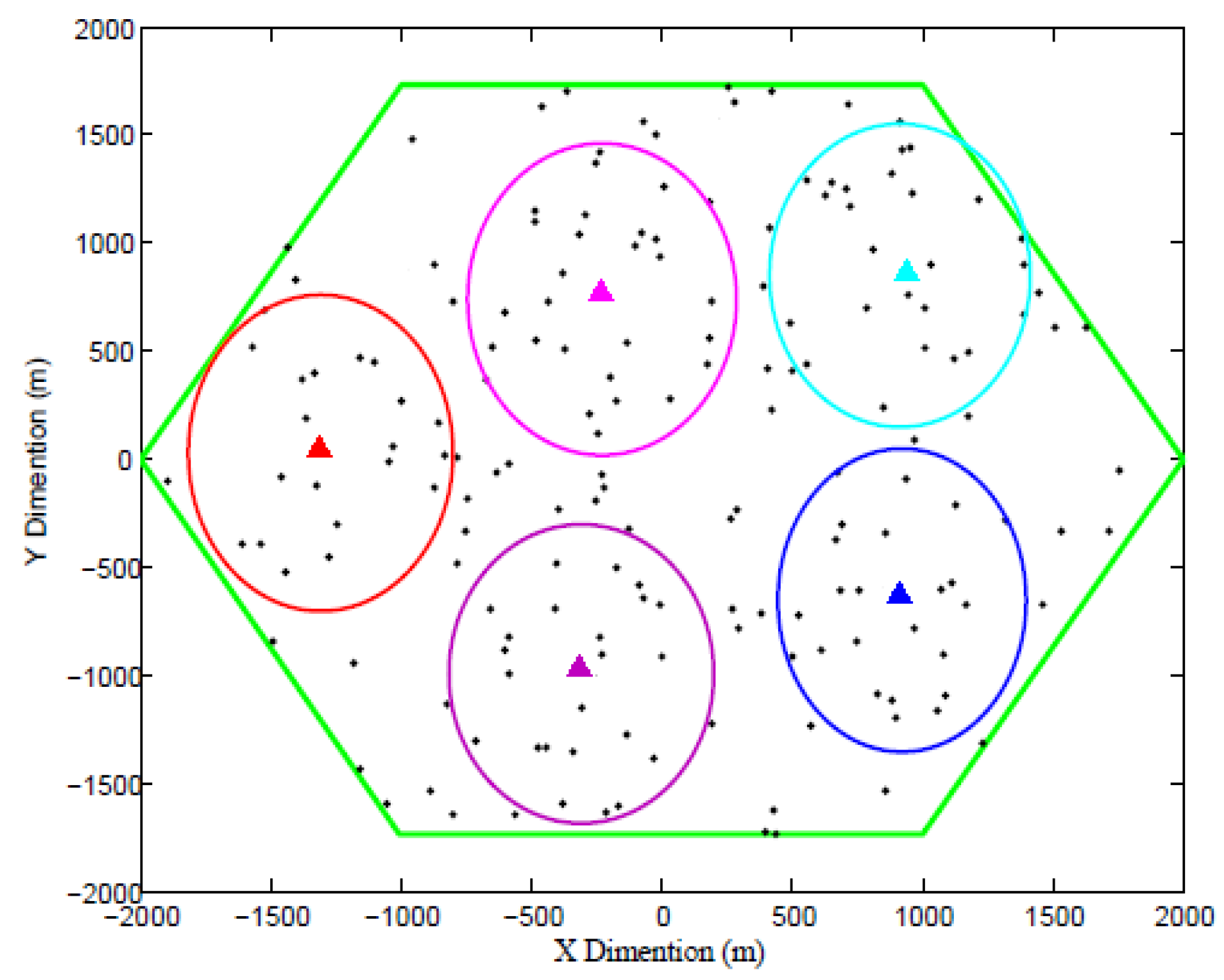
4. Optimal Drone-BSs Placement
| Algorithm 1: GWO for drone-BS deployment. |
| Initializing the drone-BSs population |
| Initialize and |
| for do |
| do |
| Calculate a distance, pathloss and evaluate coverage probability in each user |
| end for |
| Find the fitness of each search agent |
| while |
| for each search agent |
| end for |
| Update |
| Calculate the fitness of all search agents |
| Update |
| end while |
| return |
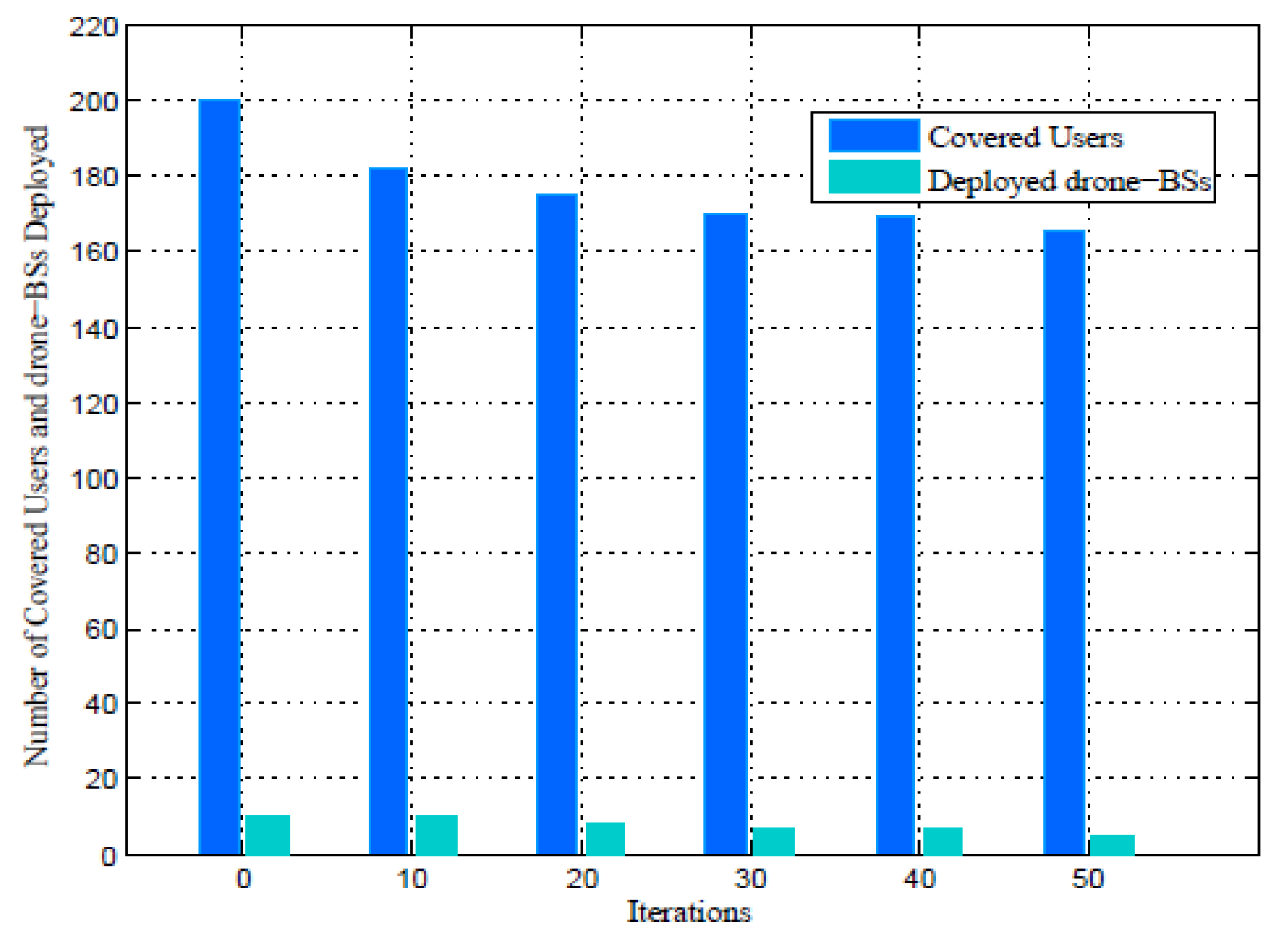
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bor-Yaliniz, I.; Yanikomeroglu, H. The New Frontier in RAN Heterogeneity: Multi-Tier Drone-Cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. Beyond 5G With UAVs: Foundations of a 3D Wireless Cellular Network. IEEE Trans. Wirel. Commun. 2019, 18, 357–372. [Google Scholar] [CrossRef] [Green Version]
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station for Maximum Coverage of Users with Different QoS Requirements. IEEE Wirel. Commun. Lett. 2018, 7, 38–41. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient Deployment of Multiple Unmanned Aerial Vehicles for Optimal Wireless Coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Chen, S.; Zhao, J. The requirements, challenges, and technologies for 5G of terrestrial mobile telecommunication. IEEE Commun. Mag. 2014, 52, 36–43. [Google Scholar] [CrossRef]
- Li, X.; Guo, D.; Yin, H.; Wei, G. Drone-assisted public safety wireless broadband network. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015; pp. 323–328. [Google Scholar]
- Kalantari, E.; Shakir, M.Z.; Yanikomeroglu, H.; Yongacoglu, A. Backhaul-aware robust 3D drone placement in 5G+ wireless networks. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–23 May 2017; pp. 109–114. [Google Scholar]
- Kalantari, E.; Yanikomeroglu, H.; Yongacoglu, A. On the Number and 3D Placement of Drone Base Stations in Wireless Cellular Networks. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–6. [Google Scholar]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 23–27 May 2016; pp. 1–5. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Elsevier Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Al-Turjman, F.; Lemayian, J.P.; Alturjman, S.; Mostarda, L. Enhanced Deployment Strategy for the 5G Drone-BS Using Artificial Intelligence. IEEE Access 2019, 7, 75999–76008. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 28 GHz | |
| ≤ h ≤ | 1000 ≤ h ≤ 3000 m |
| (number of drone-BSs) | 10 |
| (number of users) | 200 |
| 30 dBm | |
| 5 dBm | |
| 20 MHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouamri, M.A.; Oteşteanu, M.-E.; Barb, G.; Gueguen, C. Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks. Eng. Proc. 2022, 14, 18. https://doi.org/10.3390/engproc2022014018
Ouamri MA, Oteşteanu M-E, Barb G, Gueguen C. Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks. Engineering Proceedings. 2022; 14(1):18. https://doi.org/10.3390/engproc2022014018
Chicago/Turabian StyleOuamri, Mohamed Amine, Marius-Emil Oteşteanu, Gordana Barb, and Cedric Gueguen. 2022. "Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks" Engineering Proceedings 14, no. 1: 18. https://doi.org/10.3390/engproc2022014018
APA StyleOuamri, M. A., Oteşteanu, M.-E., Barb, G., & Gueguen, C. (2022). Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks. Engineering Proceedings, 14(1), 18. https://doi.org/10.3390/engproc2022014018