Abstract
Efficient bandwidth allocation in 5G networks is essential for optimizing network performance and ensuring high quality of service (QoS), particularly in unmanned aerial vehicle (UAV) communication systems. The dynamic nature of UAV networks presents challenges in managing fluctuating QoS levels, necessitating intelligent bandwidth allocation strategies. This study investigates the effectiveness of two machine learning (ML) models, least square gradient boosting (LSGB) and a Bayesian regularization feedforward neural network (BRFFNN), in predicting bandwidth allocation for UAV ground station (UAV-GS) communication under 5G specifications. Using a simulation-based approach, the study evaluates UAV bandwidth allocation under two movement patterns: circular and random. The QoS metrics considered include the packet delivery ratio (PDR), delay, and throughput. The results demonstrate that the BRFFNN outperforms LSGB, particularly in circular UAV movement, achieving a 100% PDR, a 0.00773 ms delay, and a 3.232 million packets per second (pps) throughput. These findings suggest that ML models, particularly the BRFFNN, can significantly enhance bandwidth allocation strategies in 5G UAV-GS communication systems, improving overall network efficiency and QoS. This study provides valuable insights into ML-driven bandwidth allocation, emphasizing the BRFFNN as a superior approach for enhancing QoS in 5G UAV-GS networks. In the context of 5G UAV-GS bandwidth allocation, this study applies the BRFFNN in a novel way and demonstrates its superiority over tree-based models such as LSGB. In contrast to earlier research that concentrated on static or traditional allocation techniques, our method achieves State-of-the-Art QoS by dynamically predicting bandwidth under actual UAV movement scenarios.
1. Introduction
As fifth-generation (5G) networks evolve to support next-generation applications, the increasing complexity of services surpasses traditional troubleshooting methods, requiring advanced network service assurance techniques to optimize quality of service (QoS) [1]. Researchers argue that 5G is not merely a gradual enhancement of fourth-generation (4G) networks, but represents a fundamental shift in concept [2]. 5G use cases require virtualized, automated, cloud-native, and flexible networking technology [3]. In recent years, the exponential increase in data usage, driven by the growing volume of information exchanged, has highlighted the need for adaptable communication solutions. Unmanned aerial vehicles (UAVs), or drones, have garnered significant attention in the literature over the past decade due to their flexibility in addressing these communication demands. UAVs have been explored as a means to facilitate the deployment of wireless communication services in public spaces. They are proposed to enhance wireless coverage, increase capacity, improve reliability in existing infrastructure, and even replace damaged equipment during emergencies. Equipped with transmission electronics, UAVs have been suggested as portable base stations or access points. To provide communication services to ground users, the deployment of a UAV-to-ground access network is typically required if such infrastructure is not already in place [4]. Multipath transmission enhances network performance considerably, but introduces complexities in ensuring equitable allocation.
Traditional bandwidth allocation strategies, designed for single-path scenarios, often prove inadequate in multi-path contexts, underscoring the challenges of achieving fair bandwidth distribution in such networks [5]. In [6], the bandwidth allocation and UAV placement are optimized separately. The UAV placement problem, involving complex sum-of-ratio functions, is addressed using a difference of convex (DC) optimization and quadratic transformation to iteratively convexify and solve it. The results highlight the impact of various parameters on system throughput and demonstrate significant gains compared to baseline methods. In [7], two bandwidth allocation schemes were proposed for improving fairness and link utilization in data center networks. These include a no-reallocation scheme that ensures fair transmission rates and a reallocation scheme that redistributes unused bandwidth to competing flows. In their work, there are two client groups, A and B, and these groups have access links with different delay times. Tao et al. [8] proposed a dynamic bandwidth allocation strategy for networked control systems, ensuring that each loop’s bandwidth stays within bounds and that the total allocation remains within capacity. The strategy involves estimating errors, designing a desired bandwidth algorithm, calculating dynamic weights, and presenting an ideal allocation strategy, with simulations confirming its effectiveness [9]. Borsatti et al. [10] propose a proactive radio-QoS-aware unmanned aerial vehicle ground station (UAV-GS) deployment mechanism to improve the cellular network operation mechanism. The proactive QoS-aware deployment strategy could optimize UAV-GS positioning based on LTE network conditions and QoS requirements.
Conventional bandwidth allocation methods used in 5G-enabled UAV communication systems, such as proportional fairness, max–min fairness, and zero-forcing-based scheduling, are often constrained by static allocation rules, rigid traffic handling mechanisms, and assumptions of fixed network topologies. These limitations become particularly problematic in dynamic scenarios involving UAV mobility and diverse application demands (e.g., voice, video, and data). Furthermore, most of these traditional approaches lack predictive capabilities to anticipate bandwidth requirements under fluctuating latency and signal conditions. To address these challenges, this study proposes a machine learning-based simulation framework that employs least square gradient boosting (LSGB) and a Bayesian regularization feedforward neural network (BRFFNN) to enhance bandwidth allocation efficiency between UAVs and ground stations in a 5G network. The framework simulates communication under two distinct UAV movement patterns, random and circular, using a real-world 5G traffic dataset. The effectiveness of each model is evaluated through key QoS metrics, including the packet delivery ratio (PDR), delay, and throughput, to determine their suitability for real-time bandwidth optimization.
For UAV-enabled mission-critical applications like public safety, emergency response, and disaster management, dependable and low-latency communication is crucial. According to recent research, 5G network slicing improves mission-critical communications by offering Public Protection and Disaster Relief (PPDR) channels that are isolated, incredibly dependable, and low latency [10]. Similarly, cloud-native 5G architectures have been proposed for managing mission-critical services with stringent QoS requirements, including capacity scaling, service migration, and edge deployments [11]. It has been demonstrated that device-to-device (D2D) communication under 5G enhances network resilience and facilitates effective disaster response in disaster scenarios [12]. Furthermore, the 5G-EPICENTRE project has highlighted the role of cloud-native infrastructures and network applications (NetApps) in enhancing disaster relief operations and public safety [13].
This study focuses on the basic problem of predicting bandwidth requirements under various movements and traffic types in order to overcome the drawbacks of static bandwidth allocation in dynamic UAV environments. When UAV movement is unreliable, conventional methods frequently lack adaptability and fail to maintain QoS. Although earlier research has looked at heuristic or optimization-based approaches, there is still a technical barrier to using machine learning models to dynamically estimate bandwidth based on real-time communication features. In response, we use a 5G dataset to propose and assess two ML-based models, LSGB and the BRFFNN, under both random and circular UAV trajectories. Comparative analysis of these models in forecasting bandwidth allocation and enhancing QoS outcomes, specifically the PDR, throughput, and delay, is our main contribution.
2. Related Work
The increasing demand for reliable communication in emergency response services calls for enhanced coordination, which can be achieved through advanced technologies like 5G. This research aims to assess the potential of 5G networks in improving communication efficiency by employing traffic regression methods. Additionally, it explores the performance of bandwidth allocation using machine learning models for different UAV movement patterns. The study also focuses on establishing key QoS parameters for UAV communication across 5G networks, with an emphasis on bandwidth and different data categories. Previous studies have proposed several conventional bandwidth allocation approaches for 5G communication networks.
UAV-GSs are anticipated to play a critical role in 5G and beyond networks, serving as emergency backup networks for disrupted communication infrastructure during natural disasters or sudden network failures, enabling data collection from IoT devices and facilitating content caching for vehicular communication systems [14]. Sun et al. [12] investigated resource management and bandwidth allocation for 5G and beyond radio access networks. They proposed two admission control policies to select admissible users from the perspective of optimizing the QoS. Tanuja et al. [15] used the proportional fairness algorithm technique for dynamic bandwidth allocation in 5G point-to-point networks. They show that this method can give significant performance gains in comparison to current methods using the max–min fairness algorithm and weighted fair queuing algorithm under different conditions. Their proposed method effectively allocates bandwidth to maximize data transmission, achieving a higher throughput rate. The researchers in [16] use the examined zero-forcing model (ZF) to find the maximum throughput to enable two interfering links to transmit simultaneously in specific scenarios. The focus is on identifying the suitable scheduling schemes that effectively leverage ZF precoding opportunities to enhance the network throughput. To address this, they introduced an innovative link model and obtained multiple performances of throughput in different areas. To study the coverage radius, the three-dimensional (3D) deployment of the base station is challenging, as its placement directly influences its coverage radius. This is particularly critical because, in cellular networks, each user’s equipment has unique QoS requirements, and the base station has limited capacity. Consequently, researchers have thoroughly investigated the factors affecting the base station coverage radius in their proposed study [17].
In [18], researchers introduce a novel multi-UAV deployment strategy with variable heights to leverage 3D positioning flexibility. UAVs are increasingly viewed as potential base stations for future wireless networks, where key design challenges include network coverage, throughput, and energy efficiency. To address these, fast and efficient UAV placement and resource allocation strategies are essential. In their study, the multi-tier and variable-height approach is compared against standard equal-height deployments, with height optimization aimed at enhancing energy efficiency and throughput. Their results indicate that the method significantly improves energy efficiency in multi-cell UAV networks compared to existing height optimization techniques. In Khangura et al.’s [19] research, they discuss modern estimation approaches that involve actively introducing structured simulated communication into the network to measure available end-to-end bandwidth for an application. By applying various machine learning models to evaluate structural changes along the network path, they can estimate the available bandwidth at the receiving end.
Prediction tasks are characterized by supervised learning, as the objective is to predict or categorize a certain result of interest. This learning paradigm encompasses two primary categories: classification and regression. In both cases, the objective is to establish a relationship between input and output variables [19]. One-hot encoding (OHE) is used to convert categorical variables such as “Application_Type” into binary vectors, where each category is represented as a distinct binary feature. Unlike integer encoding, which can introduce misleading assumptions about the relationships between categories, OHE ensures that no ordinal relationships are implied between categories. This encoding is crucial, particularly for the regression models used in this study, which treat encoded categories as independent features and learn separate weights for each category [20,21].
Establishing a reliable communication channel is a common challenge with a moving device or object. This study aims to leverage machine learning to achieve improved results. A combination of 5G specifications and multiple machine learning models will be utilized. However, one of the main difficulties is intelligently and dynamically allocating bandwidth to accommodate different types of traffic, including data, voice, and video, particularly when UAV movement is unpredictable. In these situations, fixed allocation or rule-based approaches frequently fail to maintain QoS. The purpose of applying the ML models in optimization-based techniques is to maximize the network’s efficiency or effectiveness. Despite growing interest in UAV-based communication systems, a technical gap remains in the application of machine learning (ML) techniques for real-time bandwidth estimation and QoS prediction. Our UAV communication dataset’s features are well suited to LSGB’s efficiency in small-to-medium datasets and robustness in handling non-linear data. However, the BRFFNN’s regularization ability, which avoids overfitting, is particularly important in highly variable wireless environments, and makes it especially well suited for noisy, real-world data. These models were chosen in order to assess the relative strengths of a regularized neural network and a robust ensemble tree-based approach in bandwidth prediction. These techniques are commonly employed in QoS simulation approaches, especially in specific applications, to derive values and assess performance. Our main contribution is the comparison of these ML models’ dynamic adaptation to traffic types and movement patterns, which shows how well ML models perform in producing better QoS results. Below are the objectives of this paper:
- Investigate network simulation for UAV-GS applications using 5G specifications, employing the BRFFNN and LSGB machine learning models for bandwidth allocation;
- Develop two different UAV movement patterns and test the effectiveness of using machine learning models for bandwidth allocation;
- Evaluate the QoS for UAV-GS communication within 5G networks. The QoS parameters used are the PDR, throughput, and delay.
3. Methodology
This work focuses on optimizing bandwidth allocation for 5G networks by employing machine learning models, specifically LSGB and the BRFFNN. Simulations are conducted to study data exchange between UAVs and ground stations, with movement patterns categorized into circular and random. The evaluation is performed using QoS parameters, including the PDR, delay, and throughput, to identify the most effective approach for improving network performance. Figure 1 shows the overall flow of the methodology.
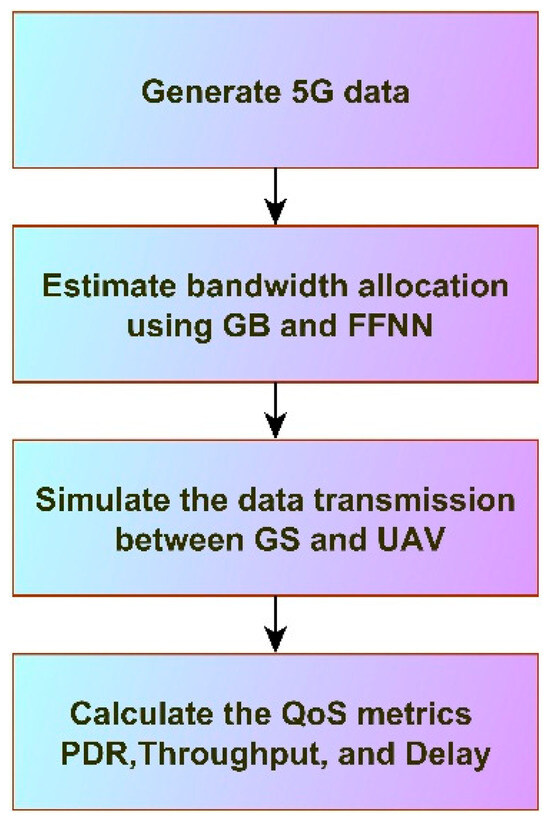
Figure 1.
General flow of the methodology.
In this research, we developed a machine learning prediction to simulate and optimize bandwidth allocation in a UAV-GS communication system under 5G constraints. The data used in this study is taken from Kaggle, which provides a dataset of 5G network traffic [22]. It comprises 15 key features, including Signal_Strength, Latency, Required_Bandwidth, Resource_Allocation, and various application-specific traffic types such as Video_Call, Streaming, VoIP_Call, Web_Browsing, and IoT_Temperature. From these, 13 features are used as the state inputs to the two machine learning models deployed to predict the required bandwidth: a LSGB model and a BRFFNN. The GB model uses the LS Boost method, while the FFNN model employs Bayesian regularization. A simulation for data communication between GS and UAV is conducted to assess the network QoS performance. It begins by generating 5G communication channels between the GS and UAVs, followed by simulating the network traffic flow for a specified time using bandwidth ranges defined by 5G standard specifications. Throughout the simulation, three QoS parameters, which are the PDR, throughput, and delay, are calculated for analysis. The simulation continues until the maximum simulation time of 150 s is reached.
3.1. Application Type for Supervised Learning
In this work, the BRFFNN and LSGB were used to treat bandwidth estimation as a supervised regression task during simulation, and one-hot encoding was manually used to deal with the categorical Application_Type feature. To make sure the models could learn unique traffic behavior, this procedure involved developing binary indicator variables for every application (such as the video, voice, and data categories). By allowing the models to identify application-specific bandwidth requirements, this encoding enhanced prediction performance, particularly for delay-sensitive services like VoIP and video streaming.
3.1.1. Gradient Boosting Model
Gradient boosting is an ensemble technique that creates a strong predictor by combining the outputs of several weaker models. It is capable of working with different types of features, such as numerical, categorical, and even missing data [23]. The GB Regression algorithm was chosen for predicting ground station loads, demonstrating superior performance compared to other tested machine learning models, including multiple linear regression, logistic regression, support vector machine with various kernel functions, random forest, and extreme gradient boosting [24]. The boosting method is a type of ensemble method that starts with an initial prediction and progressively refines it by learning from the remaining errors. At each step, a small decision tree is trained to predict these residual errors and is then added to the ensemble, thereby reducing the overall error. In machine learning models, including those based on boosting, the total error can be broken down into bias, variance, and irreducible error [25].
The GB training procedure adheres to Friedman’s least squares gradient boosting (LSGB) formulation [26]. Given a dataset , where represents the input features and the corresponding target values, the objective is to minimize a differentiable loss function L(y, f(a)), which measures the difference between the predicted value f(a) and the actual value b. This is performed by sequentially fitting base learners h (a; ϕ) to the gradients of the loss function, updating the prediction model as follows:
where is the learning rate and is the weak learner trained at iteration . Weights are calculated for each leaf node to minimize the loss locally after each tree divides the input space into regions. The iterative procedure keeps going until a maximum number of iterations or a convergence criterion is met.
3.1.2. Feedforward Neural Network
The proposed FFNN architecture is also known as a multilayer perceptron (MLP) or simply a neural network [27]. During the computation process, a group of layers, defined as two consecutive layers within the network, processes the inputs by multiplying them with their respective weights. The resulting products are then summed to compute the total input for a single neuron [28]. During the development of each machine learning algorithm, all information on contextual variables used as inputs was standardized using Z-score normalization.
where represents the input variables and is the new input of the standardized variables, while are the mean and standard deviation [29]. The data used in this study consists of five main input categories, which are signal strength, latency, resource allocation, required bandwidth, and application type. The prediction output from the BRFFNN is the allocated bandwidth, as shown in Figure 2.
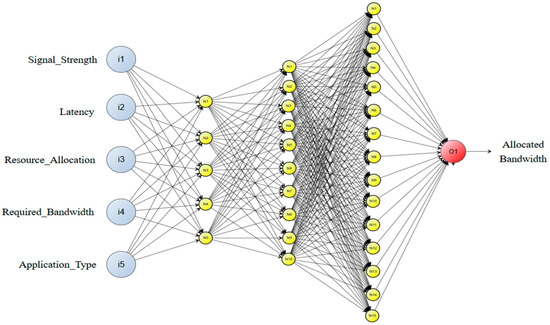
Figure 2.
The FFNN structure.
The structure of the feedforward neural network uses a regression model with five input features and a single output. The network consists of three hidden layers with 5, 10, and 15 neurons and employs a Bayesian regularization algorithm to predict the bandwidth allocations. These predictions will be used in the simulation of the UAV-GS communication system. The QoS parameters from the simulation, including packet delivery ratio, throughput, and delay, will be recorded for analysis.
Bayesian regularization [30] adjusts the FFNN’s cost function by adding both a data-fitting component that reduces prediction errors and a regularization component that discourages large weights. This strikes a balance between prediction accuracy and model complexity.
Figure 3 shows the convergence of training and validation loss over 500 epochs to demonstrate the model’s training performance. The regression plots between the training and testing sets’ actual and predicted values show excellent model performance, with an overall R-value of 0.9997. In order to forecast bandwidth allocations and subsequently analyze QoS metrics like the PDR, throughput, and delay, the trained BRFFNN model is incorporated into the UAV-GS communication simulation.
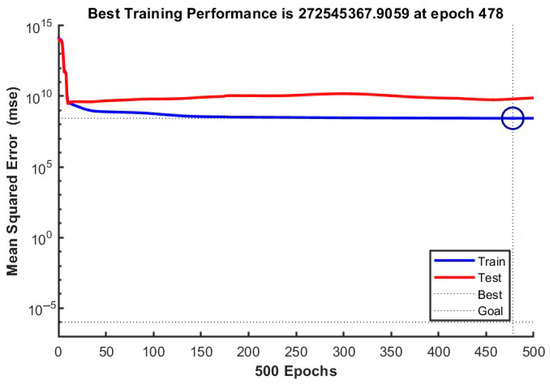
Figure 3.
Training and validation loss (MSE) curves for the BRFFNN over 500 epochs using Bayesian regularization. The best training performance was achieved at epoch 478.
3.2. Experiment Setup
The network traffic dataset comprises five key parameters, which are signal strength, latency, resource allocation, required bandwidth, and application type. We used the following preprocessing procedures to prepare the data for supervised learning and simulation:
- Text Conversion to Numeric: Fields with the values, for example, “30 ms”, “500 Kbps”, and “80%” were stripped of their units and changed to numeric values;
- Data cleaning: Rows with invalid or missing entries were eliminated. To prevent ordinal bias, one-hot encoding was applied to the Application_Type categorical column;
- Normalization of Features: Numerical features were standardized using Z-score normalization based on Equation (2).
In order to balance model complexity and accuracy, the BRFFNN’s dimensions were chosen using a grid search with five-fold cross-validation. Three hidden layers with five, ten, and fifteen neurons, using sigmoid activation, demonstrated the best trade-off between training stability and prediction accuracy out of several architectures that were tested (2–5 hidden layers, 5–50 neurons per layer). As illustrated in Figure 3, training was limited to 500 epochs and converged at epoch 478 using Bayesian regularization with an adaptive learning rate of 0.01 to avoid overfitting. Likewise, cross-validation was used to refine the gradient boosting model, and the final parameters were as follows: learning rate = 0.1, 150 estimators, max depth = 3, and a subsampling rate of 0.8. The key hyperparameters for each machine learning model are shown in Table 1.

Table 1.
Machine learning models with key hyperparameters.
These parameters are used to train the LSGB and BRFFNN models to estimate the optimized bandwidth allocation. The ML models were specifically designed to enhance communication within the UAV-GS system. Two machine learning models, LSGB and the BRFFNN, are used to predict the bandwidth allocation and test it according to the 5G requirements. The simulation involved a configuration of one UAV and GS, each with distinct properties such as speed, position, name, packet size, inter-arrival time, and bandwidth requirement. The QoS performance was tested for two UAV movement scenarios: circular and random.
The ground station (GS) is at the center of the UAV’s circular trajectory to simulate use cases where UAVs monitor or orbit a specific ground target (such as a base station or disaster site). The circular trajectory ensures consistent coverage within a fixed area. The following defines the UAV movement:
where
m, and is set so that the UAV completes one complete orbit in the 150 steps of simulation time.
In a different scenario, UAVs use a bounded random path to move in a 2D plane. The UAV position is updated with a random step (±5 units) in both the X and Y directions at each time step. This movement simulates dynamic real-world situations like GPS noise, wind drift, and adaptive mission changes. The simulation is sensitive to actual operational problems because each movement type affects the UAV-to-GS distance, which in turn affects signal strength, coverage, and delay.
The findings from the simulation will provide valuable insights into the network’s reliability and efficiency using different bandwidth allocation methods. Figure 4 illustrates the overall implementation and simulation flow.
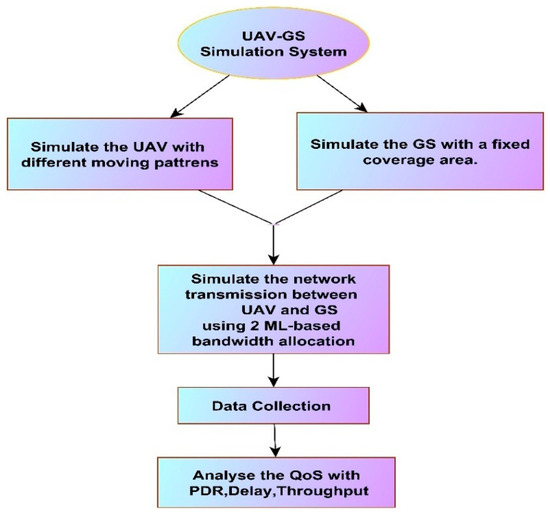
Figure 4.
UAV-GS simulation flowchart.
This paper focuses on data transmission between UAVs and GSs, encompassing video, voice, and other types of data payloads. The dataset is split into a training set (70%) and a testing set (30%). The training set is used to train both ML models. The trained models are subsequently saved and employed in the UAV and GS simulations to obtain the QoS parameters. The allocated bandwidth field in the dataset acts as our ML models’ supervised learning label. This bandwidth allocation is based on actual 5G network traces and represents resource scheduling choices that are optimized to satisfy QoS requirements (reliability, latency, and minimum throughput). For supervised learning, it is therefore regarded as the ideal target output. The Bayesian Regularized FFNN and gradient boosting models are trained to simulate an optimal QoS-aware allocation strategy by minimizing the difference between allocated and predicted bandwidth. In this study, the implementation of the ML models and the simulation were carried out on the MATLAB R2023b platform.
3.3. Quality of Service Parameters
Three QoS parameters are used to assess the performance of data transmission in this study. The QoS parameters are the PDR, delay, and throughput. The PDR measures the ratio of the number of information packets that arrive at the destination compared to the number of packets sent by the source’s network [31]. It is defined as follows:
where and are the number of packets received and sent, respectively. The simulator in MATLAB increases counters for both successfully delivered and transmitted packets at the end of each time step. The ratio of these two counters is used to calculate the final PDR at the conclusion of the simulation.
Delay is the time taken for a packet to travel from the source UAV to the destination GS. It can be calculated as the time difference between the packet transmission and its successful reception. In the simulation, the delay is calculated based on the distance between the UAV and the GS and the speed of data transmission. It is defined as follows:
where are the distance and packet transmission speed. MATLAB calculates and accumulates the delay for each packet that is successfully delivered, then computes the average delay for all packets.
Throughput represents the rate of successful packet delivery over time, measured in packets per second (pps). It can be calculated as the total number of packets successfully delivered divided by the simulation time. To dynamically track throughput throughout the run, MATLAB divides the number of delivered packets by the simulation time that has passed after each time step.
4. Result and Discussion
In the experiments, data transmission between the UAV and GS was simulated, and the QoS metrics were collected and assessed. The simulation assesses the network performance using bandwidth allocation estimated using the LSGB and BRFFNN ML models. The estimated bandwidth allocations are set to be within the standard ranges given by the 5G specification. It starts by initializing the position of UAVs and GSs, setting a maximum simulation time, and defining network’s QoS metrics. During each simulation iteration, new positions are assigned to the UAVs. Packets are generated for various applications that use data, voice, and video. The allocated bandwidth is estimated using the ML models based on the type of application. Then, the simulation checks if there is any GS that falls within the UAV coverage, and the packets will be delivered accordingly. During the simulation, the network performance metrics, including the PDR, throughput, and delay, are calculated, and the results are recorded for analysis.
Despite the promising results achieved using the BRFFNN model in terms of bandwidth prediction and QoS optimization, certain limitations must be acknowledged. First, the model is sensitive to the choice of hyperparameters, including regularization strength, training function, and the number of hidden neurons. Overfitting or less-than-ideal performance can result from improper tuning. Second, compared to more transparent models like gradient boosting trees, Bayesian regularization can limit interpretability by decreasing the transparency of the learned relationships between inputs and outputs, even though it improves generalization. These elements could make the real-time deployment of UAV systems difficult, particularly in environments with limited resources or high levels of dynamicity.
4.1. UAV Movement Pattern
Two UAV movement patterns were evaluated in this study. They are the circular and random patterns. For circular movement, the UAV continuously moves within the designated coverage area in a circular path, transmitting data packets to the ground station and recording the QoS parameters for the transmission. The circular and random movement patterns of UAVs are illustrated in Figure 5.
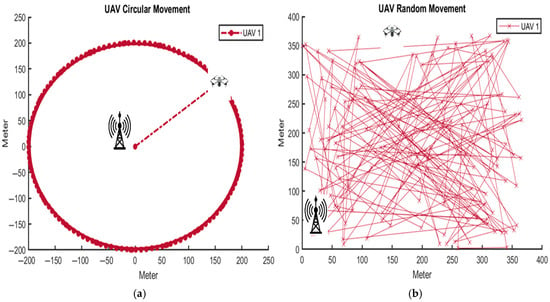
Figure 5.
The simulated UAV movement patterns: (a) circular, (b) random.
In the real world, UAVs do not always follow a predetermined or linear path. External factors such as wind, changes in mission objectives, or obstacles may cause unpredictable changes in UAV trajectories. Random movement helps to simulate this kind of uncertainty. It helps to test how the system performs under random, often challenging movement conditions. This is important for ensuring that the communication network can handle a variety of situations, not just the ideal ones.
The UAV is set to operate at speeds ranging from 1 to 15 m per second, covering an area with a size of 400 m × 400 m. The analysis shows that these UAV movement patterns effectively cover almost the entire designated area and maintain communication with the ground station. Circular and random patterns are selected in this study since they are commonly employed for communication between UAVs and ground stations.
A circular path allows the UAV to maintain a constant distance from a central point where the ground station is located, ensuring consistent signal strength and coverage. This can be advantageous for maintaining strong and stable communication links, especially in areas where the central location needs uninterrupted connectivity. Random UAV movement enables the testing of the robustness of communication protocols, coverage, and network design. It helps to evaluate how effectively the communication system handles variable distances, interference, and fluctuations in signal strength caused by changing UAV positions. This approach enables the simulation of how effectively the network maintains QoS despite constant changes in UAV positions.
4.2. Results for PDR with Circular-Shaped UAV Movement
Both the LSGB and BRFFNN models produced consistently high PDR values across the coverage area during a 150 s simulation with circular UAV movement. In fact, both models produced an average PDR of 100%, demonstrating strong performance in preserving reliable information transfer. This finding implies that bandwidth allocation is efficiently optimized by both machine learning techniques to maintain high PDR in fixed-area UAV operations.
4.3. Results for Delay with Circular-Shaped UAV Movement
Figure 6 shows the data transmission delay for communication using bandwidth allocation estimated using the BRFFNN and LSGB models. It can be observed that there are some differences in the delays for the two models.
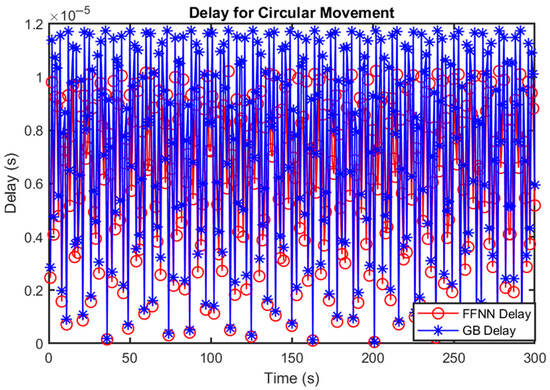
Figure 6.
Delay using BRFFNN and LSGB for bandwidth allocation with circular UAV movement.
The ML-based method yields an average delay of 0.00773 ms for LSGB and 0.00647 ms for the BRFFNN. These results indicate that LSGB incurs a slightly higher delay than the BRFFNN. Overall, the lower delay with the BRFFNN, even in complex data conditions, highlights its efficient performance and suitability for real-time applications in UAV communication scenarios.
4.4. Results for Throughput with Circular-Shaped UAV Movement
Figure 7 illustrates the throughput results, demonstrating the effective data transfer between the UAV and GS. The results highlight the UAV’s capability to maintain high throughput during swift movement, optimizing communication performance in real-time applications.
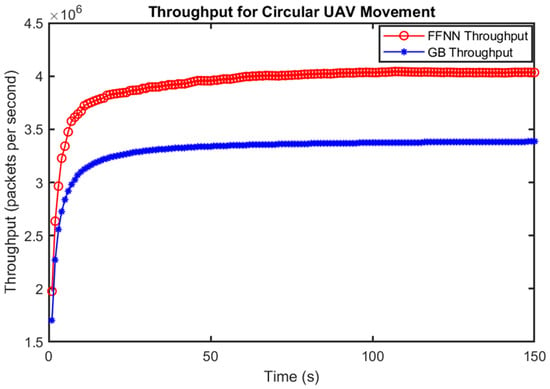
Figure 7.
Throughput using BRFFNN and LSGB for bandwidth allocation with circular UAV movement.
In the figure, the throughput for the BRFFNN model is represented by the red line, with an average of 3.843 million pps. The blue line represents the throughput for the LSGB model, which achieved an average of 3.232 million pps. These results indicate that bandwidth allocation using the BRFFNN model provides superior throughput compared to the LSGB model, suggesting that BRFFNN is more effective in maintaining higher data transmission rates.
4.5. Results for PDR with Random UAV Movement
In this experiment, the same UAV-GS system is used, but the movement of the UAV is changed to random, as shown in Figure 8. Experiments were conducted to study the QoS using the BRFFNN and LSGB models for bandwidth allocation.
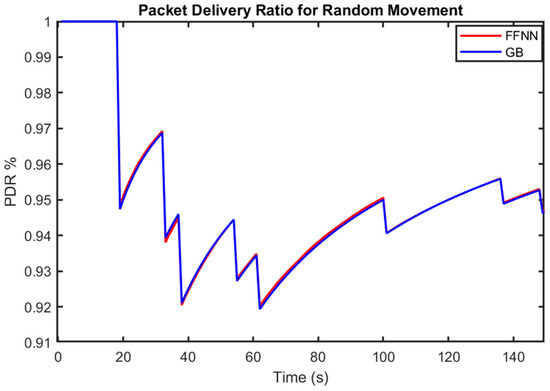
Figure 8.
PDR using BRFFNN and LSGB for bandwidth allocation with random UAV movement.
In scenarios involving random movement, the BRFFNN and LSGB models achieved an average PDR of 95.15% and 95.13%, respectively. These results indicate that the BRFFNN model slightly outperforms the LSGB model in maintaining higher packet delivery rates, showcasing its robustness in more dynamic conditions.
4.6. Results for Delay with Random UAV Movement
Figure 9 shows the value of data transmission delay for bandwidth allocation using the BRFFNN and LSGB ML models.
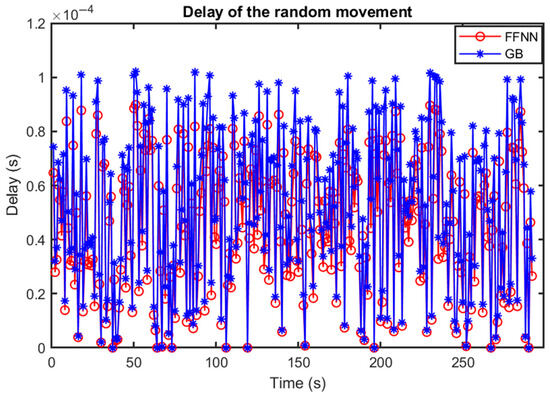
Figure 9.
Delay using BRFFNN and LSGB for bandwidth allocation with random UAV movement.
The results show that the average delay for the BRFFNN model, represented by the red line, is 0.0456 ms, while the LSGB model, represented by the blue line, experiences a slightly higher delay of 0.0542 ms. These results indicate that the BRFFNN model achieves lower delays than the LSGB model. This performance, measured within a randomly set area, highlights the effectiveness of BRFFNN-driven bandwidth allocation in enhancing QoS metrics in 5G UAV communication scenarios.
4.7. Results for Throughput with Random UAV Movement
Finally, the throughput of the UAV-GS communication system using bandwidth allocation estimated using the BRFFNN and LSGB models is compared, and the results are presented in Figure 10. This figure illustrates how each model impacts data transmission rates in the UAV-GS link. By evaluating the throughput achieved by both models, we can assess their effectiveness in sustaining high data rates under the given simulation conditions.
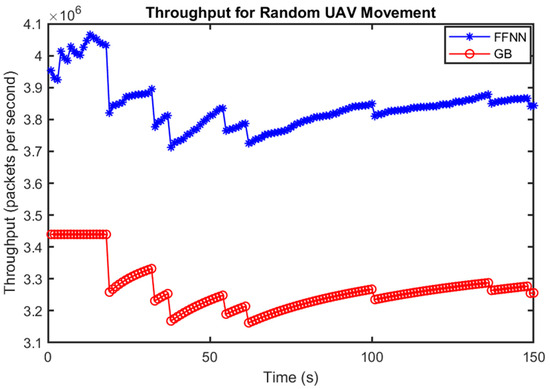
Figure 10.
Throughput using BRFFNN and LSGB for bandwidth allocation with random UAV movement.
The throughput is calculated using two machine learning models, the BRFFNN and LSGB, for bandwidth allocation under 5G standard specifications. As shown in Figure 10, the average throughput for the BRFFNN model, represented by the red line, is approximately 3.841 million pps. In comparison, the LSGB model achieves an average throughput of around 3.272 million pps. This indicates that the BRFFNN model outperforms the LSGB model in terms of throughput. The notable difference in the bandwidth estimates between the BRFFNN and LSGB models will be further discussed in the next section.
4.8. Comparison of LSGB and BRFFNN Based on UAV Movement Pattern
The QoS performance in terms of the PDR, throughput, and delay for UAV-GS communication using bandwidth allocation based on LSGB and the BRFFNN with two different UAV movement patterns is compared in this section.
4.8.1. Circular UAV Movement
In the scenario where the UAV follows a circular path, the QoS metrics obtained are shown in Figure 11.
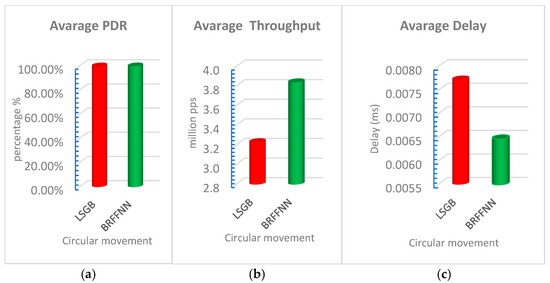
Figure 11.
Result for (a) PDR, (b) throughput, and (c) delay for circular UAV movement.
The results show that both the LSGB and BRFFNN models achieved a 100% PDR, as illustrated in Figure 11a. However, the throughput recorded using the BRFFNN was 3.843 million packets per second (pps), compared to 3.232 million pps using LSGB, as shown in Figure 11b. Additionally, Figure 11c presents the data transmission delay, where the BRFFNN achieved a lower delay of 0.00647 ms, while LSGB recorded 0.00773 ms. These results indicate that while both models perform well in terms of the PDR, the BRFFNN demonstrates superior performance with higher throughput and reduced latency. The analysis highlights key differences in QoS for data transmission between the UAV and GS when using LSGB and the BRFFNN for bandwidth allocation. These findings emphasize the importance of applying robust machine learning techniques to enhance network performance in real-world UAV communication systems.
4.8.2. Random UAV Movement
In this scenario, the UAV follows a random movement pattern, and the same QoS metrics (PDR, throughput, and delay) were evaluated. The bandwidth allocation results using the BRFFNN and LSGB models are shown in Figure 12. For random UAV movement, the average PDR, as seen in Figure 12a, is 95.13% using the LSGB model, and 95.15% using the BRFFNN model. Figure 12b presents the average throughput, where the BRFFNN achieves 3.841 million packets per second (pps), compared to 3.272 million pps using LSGB for bandwidth estimation. Additionally, Figure 12c illustrates the data transmission delay, showing that the BRFFNN achieves a lower delay of 0.0465 ms compared to 0.0542 ms for LSGB. These results indicate that the BRFFNN consistently outperforms LSGB, achieving a higher PDR, increased throughput, and lower latency. This performance advantage is observed in both circular and random UAV movement patterns, demonstrating the suitability of the BRFFNN for bandwidth allocation in UAV-GS communication under 5G conditions.
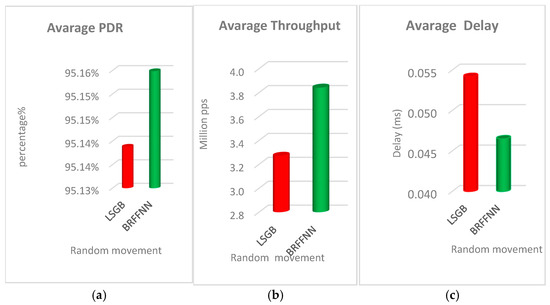
Figure 12.
Results for (a) PDR, (b) throughput, and (c) delay for random UAV movement.
The simulation results reveal that there are differences in the performance of data transmission between the UAV-GS when using the LSGB and BRFFNN models for bandwidth estimation. BRFFNNs are effective at learning complex, non-linear interactions between features, especially in mixed data types such as categorical and numerical. They can work effectively with categorical data through one-hot encoding or embeddings, making them adaptable to both large and small categories of data. Least squares gradient boosting is also effective for estimating bandwidth allocation; however, it has a slightly inferior performance compared to the BRFFNN. Ongoing research and refinement using different ML-based bandwidth allocation methods are essential to enhance their accuracy and reliability, ultimately advancing the QoS of UAV communication systems.
Although the quantitative results show that the BRFFNN consistently performs better than LSGB in terms of throughput, delay, and the PDR, additional investigation identifies a number of contributing factors. In order to improve generalization and avoid overfitting, the BRFFNN first employs Bayesian regularization during training, particularly in the noisy, unpredictable input conditions that are common in UAV communication environments. As a result, the model becomes more dependable and stable over several simulation runs. On the other hand, LSGB may need extensive hyperparameter tuning and is more likely to overfit in compact or moderately noisy datasets, despite its effectiveness in capturing non-linear relationships. Furthermore, on resource-constrained UAV platforms, the BRFFNN exhibits a lower computational cost during inference, which makes it more appropriate for real-time bandwidth prediction. In comparison to the trained BRFFNN’s single, compact structure, the ensemble nature of LSGB, which is based on hundreds of low decision trees, increases memory usage and inference time from a complexity standpoint. These features account for the BRFFNN’s demonstrated superiority in accuracy, operational robustness, and deployment efficiency.
4.8.3. Standard Deviation Analysis of Delay and Throughput
Each experiment was carried out ten times using various random seeds and UAV initialization parameters in order to increase the reliability of the findings and provide information on the simulations’ variability. In order to demonstrate the statistical robustness of the experiments, the reported metrics include the mean values for each run along with the standard deviation (SD) and 95% confidence intervals (CIs). The following figures illustrate the analysis results for delay and throughput for bandwidth allocation using the BRFFNN and LSGB models. The shaded region represents the 95% confidence interval for each model. The negligible variability indicates that the models maintain robust delivery performance within the coverage area.
The results of mean ±95% CI for the PDR over a 150 s simulation period show that both the BRFFNN and LSGB maintain a consistently high PDR (~90–100%) across all time instances. For the data transmission delay, the result of mean ±95% CI is shown in Figure 13. The BRFFNN consistently exhibits lower delay (~1.5–2.0 × 10−3 ms) compared to LSGB (~2.0–2.5 × 10−3 ms). The confidence intervals for the BRFFNN are narrower, indicating more stable delay performance. LSGB delay values have slightly higher variability due to less precise bandwidth allocation.
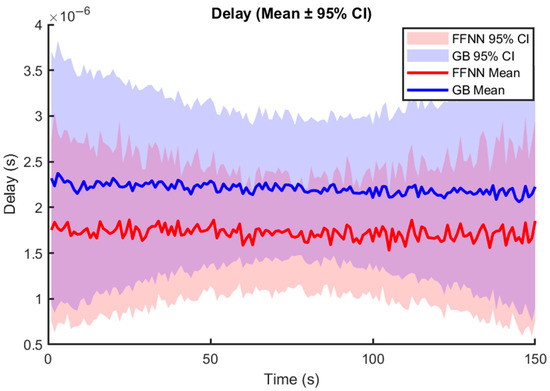
Figure 13.
Standard deviation for delay (UAV random movement).
Figure 14 shows the mean ±95% CI of throughput in packets/second. The BRFFNN achieves higher throughput (~4.0–4.2 million pkt/s) compared to LSGB (~3.1–3.3 million pkt/s). The confidence intervals for the BRFFNN are more compact, showing stable bandwidth utilization, while LSGB shows slightly larger fluctuations.
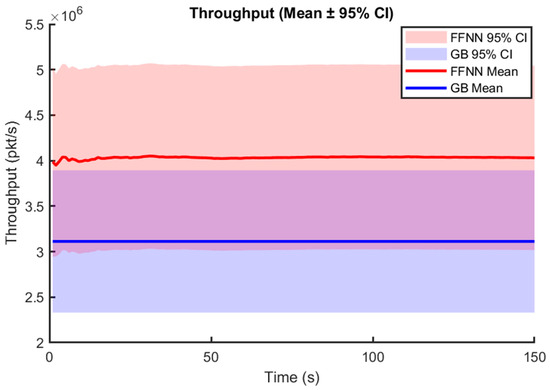
Figure 14.
Standard deviation for throughput (UAV random movement).
The BRFFNN performs better than LSGB in terms of decreased delay, increased throughput, and more stable performance under random UAV movement patterns, as demonstrated by the standard deviation and confidence interval analysis. In dynamic UAV-GS communication environments, the BRFFNN model is more suited to bandwidth allocation due to its superior robustness and reliability.
5. Conclusions
This study highlights the benefits of using machine learning models for intelligent bandwidth allocation in UAV-GS communication systems. By analyzing key QoS metrics—throughput, the PDR, and delay—under both circular and random UAV movement patterns, we revealed important trade-offs between coverage and QoS stability. While random movement offers broader area coverage and better represents real operational variability, circular movement provides more stable connectivity, making it suitable for targeted monitoring scenarios such as disaster response and surveillance. The findings consistently show that the Bayesian Regularized FFNN outperforms LSGB, achieving a higher throughput and PDR while reducing delay. This improved performance can be attributed to the BRFFNN’s ability to capture complex, non-linear interactions within the data, leading to more accurate bandwidth predictions even under highly dynamic conditions. From an academic perspective, this work expands the growing body of research on intelligent bandwidth management in aerial networks. From a practical viewpoint, it offers a basis for adaptive bandwidth allocation strategies that can be applied to critical applications like emergency response, remote monitoring, and security operations.
Nonetheless, this work has limitations. It is constrained to a single UAV and GS setup, which simplifies the network dynamics but does not reflect the complexity of multi-UAV coordination. Additionally, the models were trained and evaluated under simulation-specific conditions, meaning that their generalizability to real-world deployments with channel interference, diverse traffic patterns, and mobility challenges may be limited.
Future work will concentrate on applying adaptive modulation schemes designed for low-latency, high-reliability 5G and beyond, implementing online learning and increasing this framework to multi-UAV coordination. We also intend to narrow the gap between simulation and deployment by implementing hardware-in-the-loop (HIL) validation or field testing and integrating real-world datasets to enhance real-world applicability. Furthermore, investigating multi-modal communication frameworks could increase robustness and make the models more appropriate for mission-critical, large-scale UAV operations.
Author Contributions
M.A.A.: Writing—original draft, Methodology, Investigation, Conceptualization, Formal analysis, and Data curation. S.S.T.: Writing—review and editing, Validation, Formal analysis, and Supervision. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tran, N.P.; Delgado, O.; Jaumard, B.; Bishay, F. ML KPI Prediction in 5G and B5G Networks. In Proceedings of the 2023 Joint European Conference on Networks and Communications and 6G Summit, EuCNC/6G Summit, Gothenburg, Sweden, 6–9 June 2023; pp. 502–507. [Google Scholar] [CrossRef]
- Haider, U.; Waqas, M.; Hanif, M.; Alasmary, H.; Qaisar, S.M. Network load prediction and anomaly detection using ensemble learning in 5G cellular networks. Comput. Commun. 2022, 197, 141–150. [Google Scholar] [CrossRef]
- Shankar, R.; Duraisamy, S. Effects of 5G Technology and its Challenges (November 22, 2022). SSRN Electron. J. 2022, 10, 127–134. [Google Scholar] [CrossRef]
- Mayor, V.; Estepa, R.; Estepa, A. QoS-Aware Multilayer UAV Deployment to Provide VoWiFi Service over 5G Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 3110572. [Google Scholar] [CrossRef]
- Wang, H.; Song, L. A distributed end-to-end fair bandwidth allocation algorithm for multi-path networks. Comput. Electr. Eng. 2024, 120, 109635. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Ho, T.M.; Le, L.B.; Girard, A. UAV placement and bandwidth allocation for UAV based wireless networks. In Proceedings of the 2019 IEEE Global Communications Conference, Big Island, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ito, Y.; Koga, H.; Iida, K. A bandwidth allocation scheme to improve fairness and link utilization in data center networks. IEICE Trans. Commun. 2018, E101B, 679–687. [Google Scholar] [CrossRef]
- Wu, S.; Mao, W.; Liu, C.; Tang, T.; Rong, B. Dynamic traffic prediction with adaptive sampling for 5G HetNet IoT applications. Wirel. Commun. Mob. Comput. 2019, 2019, 4687272. [Google Scholar] [CrossRef]
- Tao, Y.; Wei, H.; Yixin, Z. A dynamic allocation strategy of bandwidth of networked control systems with bandwidth constraints. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1153–1158. [Google Scholar] [CrossRef]
- Borsatti, D.; Giust, F.; Gramaglia, M.; Hoffmann, M.; Kaloxylos, A.; Li, X.; Mangues-Bafalluy, J.; McKeown, D.; Moggio, F.; Moltchanov, D.; et al. Mission Critical Communications Support With 5G and Network Slicing. IEEE Trans. Netw. Serv. Manag. 2023, 20, 595–607. [Google Scholar] [CrossRef]
- Spantideas, S.T.; Giannopoulos, A.E.; Trakadas, P. Smart Mission Critical Service Management: Architecture, Deployment Options, and Experimental Results. IEEE Trans. Netw. Serv. Manag. 2025, 22, 1108–1128. [Google Scholar] [CrossRef]
- Rawat, P.; Haddad, M.; Altman, E. Towards efficient disaster management: 5G and Device to Device communication. In Proceedings of the 2015 2nd International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Rennes, France, 30 November–2 December 2015; pp. 79–87. [Google Scholar] [CrossRef]
- Apostolakis, K.C.; Margetis, G.; Stephanidis, C.; Duquerrois, J.M.; Drouglazet, L.; Lallet, A.; Delmas, S.; Cordeiro, L.; Gomes, A.; Amor, M.; et al. Cloud-native 5G infrastructure and network applications (NetApps) for public protection and disaster relief: The 5G-EPICENTRE Project. In Proceedings of the 2021 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Porto, Portugal, 8–11 June 2021; pp. 235–240. [Google Scholar] [CrossRef]
- Abubakar, A.I.; Mollel, M.S.; Onireti, O.; Ozturk, M.; Ahmad, I.; Asad, S.M.; Sambo, Y.; Zoha, A.; Hussain, S.; Imran, M.A. Coverage and throughput analysis of an energy efficient UAV base station positioning scheme. Comput. Netw. 2023, 232, 109854. [Google Scholar] [CrossRef]
- Tanuja, K.S.; Shanmukaswamy, C.V.; Gurushankar, H.B.; Dinesh, H.A. Dynamic Bandwidth Allocation Scheme for Enhanced Performance in 5G Point-To-Point Networks. ICTACT J. Commun. Technol. 2023, 6948, 2945–2951. [Google Scholar] [CrossRef]
- Hou, R.; Lui, K.S.; Li, J. Scheduling in Multihop Wireless Networks with Zero-Forcing Precoding. IEEE Trans. Veh. Technol. 2015, 64, 5817–5830. [Google Scholar] [CrossRef]
- Mandloi, D.; Arya, R. QoS-aware UAV mounted base station deployment in a disaster scenario with user position estimation. E-Prime-Adv. Electr. Eng. Electron. Energy 2023, 6, 100281. [Google Scholar] [CrossRef]
- Nafees, M.; Thompson, J.; Safari, M. Multi-Tier Variable Height UAV Networks: User Coverage and Throughput Optimization. IEEE Access 2021, 9, 119684–119699. [Google Scholar] [CrossRef]
- Khangura, S.K.; Akın, S. Online available bandwidth estimation using multiclass supervised learning techniques. Comput. Commun. 2021, 170, 177–189. [Google Scholar] [CrossRef]
- Sun, Y.; Zheng, J.; Zhao, H.; Zhou, H.; Li, J.; Li, F.; Xiong, Z.; Liu, J.; Li, Y. Modifying the one-hot encoding technique can enhance the adversarial robustness of the visual model for symbol recognition. Expert Syst. Appl. 2024, 250, 123751. [Google Scholar] [CrossRef]
- Kaluri, R.; Rajput, D.S.; Xin, Q.; Lakshmanna, K.; Bhattacharya, S. Roughsets-based Approach for Predicting Battery Life in IoT. Intell. Autom. Soft Comput. 2021, 27, 453–469. [Google Scholar] [CrossRef]
- Yıldız, A. 5G Quality of Service: Data-Driven Insights. Available online: https://www.kaggle.com/code/xreina8/5g-quality-of-service-data-driven-insights (accessed on 1 July 2025).
- Gong, W.; Xu, H.; Lu, J.; Kim, J.; Zhao, Y.; Li, N.; Zhang, Y.; Yang, J.; Xu, D.; Liang, H. Gradient boosting decision tree algorithms for accelerating nanofiltration membrane design and discovery. Desalination 2024, 592, 118072. [Google Scholar] [CrossRef]
- Topkova, T.; Pleninger, S.; Hospodka, J.; Kraus, J. Evaluation of DME network capability using combination of rule-based model and gradient boosting regression. J. Air Transp. Manag. 2024, 119, 102637. [Google Scholar] [CrossRef]
- Meiseles, A.; Rokach, L. Iterative Feature eXclusion (IFX): Mitigating feature starvation in gradient boosted decision trees. Knowl.-Based Syst. 2024, 289, 111546. [Google Scholar] [CrossRef]
- Wang, F.; Mamo, T. Computers & Industrial Engineering Gradient boosted regression model for the degradation analysis of prismatic cells. Comput. Ind. Eng. 2020, 144, 106494. [Google Scholar] [CrossRef]
- Jibril, M.M.; Zayyan, M.A.; Malami, S.I.; Usman, A.G.; Salami, B.A.; Rotimi, A.; Abba, S.I. Implementation of nonlinear computing models and classical regression for predicting compressive strength of high-performance concrete. Appl. Eng. Sci. 2023, 15, 100133. [Google Scholar] [CrossRef]
- El-sharkawy, M.; Wael, M.; Mashaly, M.; Azab, E. Re-configurable parallel Feed-Forward Neural Network implementation using FPGA. Integration 2024, 97, 102176. [Google Scholar] [CrossRef]
- Alcántara, J.U.R.; Pozos-Estrada, A.; Gómez-Martinez, R. Use of Artificial Neural Networks to Predict Wind-Induced External Pressure Coefficients on a Low-Rise Building: A Comparative Study. Adv. Civ. Eng. 2022, 2022, 8796384. [Google Scholar] [CrossRef]
- Courville, A.; Goodfellow, I.; Bengio, Y. Deep Learning; MIT Press: Cambridge, MA, USA, 2017; Volume 521, p. 785. [Google Scholar] [CrossRef]
- Fazeldehkordi, E.; Amiri, I.S.; Akanbi, O.A. Literature Review. In A Study of Black Hole Attack Solutions; Elsevier: Amsterdam, The Netherlands, 2016; pp. 7–57. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).