Abstract
Unexpected traffic incidents cause safety concerns and intense traffic congestion on crowded urban road networks. Vehicular ad-hoc network (VANET)-aided Intelligent Transport Systems (ITS) aim to mitigate these risks through timely dissemination of alert messages. However, conventional Radio frequency (RF) mobile ad-hoc routing protocols are ill-suited for dynamic VANET environments due to high mutual interference, packet collisions, high end-to-end delay from frequent route discoveries, and periodic beaconing requirements. Fortunately, the quickly emerging Visible Light Communications (VLC) provide complementary short-range connectivity with high bandwidth and low interference. This paper proposes an efficient adaptive routing protocol for emergency messages in dense VANET scenarios leveraging a hybrid RF/VLC system. When an incident or congestion happens, the source vehicle disseminates the information to the incoming vehicles as quickly as possible using a combination of VLC and RF communication networks. Multi-hop relays extend the connectivity if the direct links are blocked. The coverage area is partitioned into zones based on road segments, intersections, and traffic flows. The Road Side Units (RSU)s are intelligently assigned to zones and they analyze the historical traffic data to characterize each zone and decide a response strategy. We also propose a congestion detection scheme that utilizes traffic simulations to forecast the clearance times under different response strategies. The highest-scoring strategy is selected based on the predicted impacts on travel time, emissions, and driver stress levels. The proposed algorithm adaptively uses the selected strategy to proactively alleviate the predicted congestion through optimized routing and control. Overall, the protocol maximizes safety and efficiency during emergencies by leveraging the hybrid RF/VLC, incorporating real-time congestion forecasting and dynamic rerouting into the response strategies.
1. Introduction
Several radio frequency (RF) technologies, such as Dedicated Short-Range Communication (DSRC) or IEEE 802.11p and Wireless Access in Vehicular Environments (WAVE), have been leveraged for inter-vehicular connectivity [1]. Vehicles may broadcast a WAVE Short Message (WSM) to neighboring vehicles when they encounter events on the road [2]. On the other hand, the rapidly emerging Cellular Vehicular-to-Everything (C-V2X) standard defines various communication modes between vehicles and the surrounding environment, including other vehicles over 5G+ cellular networks.
Although RF communication systems should ideally provide up to 1000 m coverage in open highway scenarios and up to 300 m in urban scenarios, their practical ranges are much lower, especially in tunnels, under bridges, and in downtown areas with many tall buildings [3]. The RF transmission may also encounter disruptions in secure or restricted areas where outside signals are limited [4].
Furthermore, crowded urban streets significantly increase the mutual interference among RF communication links, and this is especially true during congestion. This elevated interference contributes to high packet collision rates, significantly reducing the throughput of RF-based vehicular communications [5]. This is ironic because it is during congestion when real-time information exchanges among the vehicles and the cloud become so important to overcome [6,7,8].
Therefore, maintaining robust and reliable network connectivity is a major issue in VANETs during emergency situations when timely transmission of safety messages is essential. However, this is exactly when latency and packet losses of RF communication systems tend to rise markedly due to congestion. Even the sheer volume of critical alerts generated during incidents can overburden and degrade network performance [9]. This is where the rapidly emerging Visible Light Communication (VLC) can play an important role in easing the situation because VLC systems have much less mutual interference. The focus of this paper is to design a hybrid RF/VLC system for efficient congestion management.
1.1. Background
In VANETs, Road Side Units (RSUs) provide a critical roadside infrastructure for Vehicular-to-Everything (V2X) communication. Indeed, RSUs act as mini base stations and gateways, connecting the vehicular network to the rest of the world. They can also provide cloud-based services transferring data between the vehicles, other RSUs, and the cloud back end or operate as fog nodes with their own computing capabilities [10]. Moreover, modern vehicles in intelligent transportation systems (ITSs) rely on various onboard devices and sensors, and they communicate wirelessly. A main component of an ITS is the onboard unit (OBU) that serves as a router, enabling the messages to be exchanged between a vehicle and other entities, while serving as a hub for the sensors and managing various vehicular functionalities. The OBU connects to the nearest RSU, which in turn extends this connectivity to the cloud networks. Together, the OBUs and RSUs act as smart edge/fog devices providing the basic networking needed for the ITS [4]. Besides, VLC can be used between the RSU and the OBU in some cases [11].
In addition, messages in VANETs can be primarily classified into two categories: safety-related critical (SRC) messages and regular informational messages [12]. The SRC messages are related to potentially hazardous events requiring an urgent response, such as collision and accident warnings, vehicle mechanical issues, and other similar safety notifications. Due to their emergency nature, SRC messages demand low latency and high reliability in dissemination. On the other hand, regular informational messages encompass non-urgent data such as general traffic management updates, in-vehicle infotainment, and periodic beacon signals. As they do not pertain to imminent safety risks, informational messages have less stringent requirements for latency and reliability compared to safety-related critical SRC alerts [13]. Therefore, differentiating the handling of messages based on their urgency and purpose using an appropriate protocol is needed [14].
Routing protocols, originally designed for mobile ad-hoc networks (MANETs), have been widely used in VANETs [15,16]. However, they are not very efficient due to issues like high end-to-end delays, low data transmission rates, and low packet delivery ratios. Also, the extra bandwidth consumption resulting from the frequent route discovery processes and periodic beaconing of MANET routing protocols is a concern in a highly dynamic VANET environment.
On another frontier, VLC is a rapidly emerging technology for vehicular networks due to recent advancements in high-intensity light-emitting diodes (LEDs) that are widely used in vehicles and traffic lights for lighting purposes. The LEDs also have the capability to function as VLC transmitters, with their high-speed switching capabilities. VLC offers significantly less mutual interference compared to RF-based systems due to its short-range and line-of-sight (LoS) transmission properties, [17]. The benefits of using VLC for VANET are as follows:
High bandwidth: The VLC can provide much higher data rates (of several Mbps) compared to the one provided by typical RF systems such as DSRC (n more than 1 Mbps). This option is useful when transmitting large emergency alerts or high-definition sensor/map data.
Increased security and privacy: The VLC signals are highly directional and they focus within a narrow beam. This makes eavesdropping or intercepting VLC communications much more difficult compared to the case of omnidirectional RF.
Less interference: The VLC uses a non-overlapping visible light spectrum, which is less prone to interference from other vehicles that can occur in the crowded RF spectrum bands.
No regulatory issues: The VLC spectrum usage does not require licensing and it is globally available, unlike some RF frequencies.
Improved positioning: The directional nature of the VLC beams helps in determining the sender and receiver positions more precisely than in the case of non-directional RF. This helps in the routing and emergency response.
Supplements RF gaps: The VLC can relay the messages between the vehicles/ infrastructure in situations where the RF signals may be obstructed, such as tunnels and underground parking structures.
However, the directional nature of VLC poses some challenges for its application, especially at road intersections, where signal propagation in diverse directions is required. Therefore, hybrid RF/VLC systems that leverage the advantage of both the RF and VLC technologies are widely investigated [18]. While RF has broader coverage and is suitable for usage beyond LoS, VLC provides valuable redundancy with low interference for short-range transmissions, where a direct signal path exists. Hence, hybrid RF/VLC networks can complement each other in VANET applications [19]. They have the potential to improve the reliability, throughput, and coverage, for time-critical safety-related messaging in VANETs [20,21].
1.2. Paper Outline and Contributions
In this paper, we have proposed a novel adaptive routing protocol for emergency message dissemination in VANETs, which jointly utilizes RF and VLC technologies. In this protocol, first, we partition the coverage area into different zones based on road segments and traffic patterns. Then, the RSUs are assigned to these zones based on historic traffic data and zone dynamics. Unique RF channels and VLC channels/beams are then assigned to each zone, minimizing the interference between these zones, considering the bandwidth, throughput, and spill-over interference. The RSUs are responsible for building real-time topology maps to optimize the interference-aware assignments of vehicles to the zone resources. They also publish schedules that specify the channel hopping cycles and time slots. The vehicles are associated with the RSU that has the strongest broadcast signal, and the beacon periods alternate between the directional RF and LoS-based VLC communications. In an emergency situation, our protocol enables the source vehicle to simultaneously broadcast some warnings across all the channels to rapidly notify the surrounding vehicles. It should be emphasized that to extend the connectivity between the zones when the direct links are not available, multi-hop relays are considered.
Our protocol aims to provide robust and low-latency dissemination of safety messages during incidents on congested roadways. Indeed, its design integrates a congestion detection and management scheme that works as follows: when an accident is detected, the RSU simulates the clearance times under different response strategies to score their impacts on the travel time, emissions, and driver stress levels. The highest-scoring strategy is then selected based on a consensus from the connected vehicles, and adaptive traffic signals prioritize the selected strategy while maintaining coordination across the zones. The latter action aims to proactively alleviate the traffic jams through optimized routing and signal control.
It should also be noted that in our proposed approach, adding the VLC capability to vehicles and infrastructure involves additional hardware costs compared to solely relying on the RF. These include: using the LEDs, photo-detectors, and the associated drive/receive circuitry on all nodes; using transceivers that enable the switching between the RF and VLC modes; dealing with the potential high energy consumption when both radios are active simultaneously. However, there are also some benefits associated with our proposed hybrid VLC/RF approach. For instance,
- The VLC helps in offloading some traffic from the RF spectrum, thereby avoiding the need for additional RF access points in places where the LOS dominates.
- Multi-hop relaying avoids the need for universal RF coverage, leading to infrastructure cost reduction.
- The location privacy afforded by the VLC could reduce the costs of more complex identity/tracing systems on the RF side.
To the best of our knowledge, this work is the first to:
- Propose a zone-based resource optimization and topology mapping method enabling congestion-aware protocols.
- Develop an emergency broadcasting mechanism leveraging dynamic resource assignments for reliable multicasting under disruption.
- Introduce a vehicle consensus-based predictive response integrated with adaptive signaling for coordinating relief across network divisions.
By developing these novel coordination techniques, our work provides a solution uniquely optimized for maximizing emergency alerting resilience and traffic management responsiveness under challenging impaired mobility conditions.
Simulation experiments are conducted using realistic mobility traces to evaluate the protocol’s performance in collision and congestion scenarios, showing the superiority of our hybrid VLC/RF-based protocol over the single VLC-based protocol and RF-based protocol, in terms of reduced total congestion exposure for vehicles, reduced packet loss, and reduced latency.
The remainder of the paper is organized as follows. In Section 2, some related work in the areas of emergency message routing in VANETs, interference avoidance techniques, and congestion detection algorithms, are discussed. In Section 3, the considered system model is described, including the network architecture, channel characterization, and propagation models. In Section 4, our proposed algorithm is described, outlining the zone partitioning and RSU assignment approach, the methodology, the emergency message broadcasting protocol, and the congestion prediction and mitigation scheme. In Section 5, our proposed protocol is evaluated by simulations and compared against the predefined benchmark schemes in terms of packet delivery ratio and transmission delay. Finally, Section 6 concludes the paper.
2. Related Work
While some studies have proposed hybrid approaches, limitations remain in addressing the key requirements for practical emergency response applications.
Research on emergency message dissemination in vehicular networks has focused on three main approaches: flooding-based protocols, clustering techniques, and position-based methods.
Flooding-based protocols aim to quickly propagate alerts, such as an urban multi-hop broadcast protocol (UMBP) proposed in 2015 by [22] to disseminate emergency messages that quickly selects remote neighboring nodes to reduce dissemination delays. However, it does not consider dynamic network conditions which can impact delays and reliability in dense environments. In 2017, [23] introduced a protocol relying on message contents for rebroadcasting. Some potential issues are that restricting broadcasts based on static position fields may fail to promptly propagate alerts through new or changing network topologies. Reliance only on received messages limits context awareness of local channel load and member positions over time. Performance could degrade under high congestion or disruption without coordination between nodes. Furthermore, in 2022, [24] proposed an optimized Ad-hoc Multi-hop Broadcast protocol, aiming to reduce traffic while shortening times and improving reliability. However, performance may degrade under high congestion without coordination. Reliability and scalability need examination under varying conditions.
Clustering techniques organize vehicles to curb flooding. In 2018, [25] proposed a Cluster-based Recursive Broadcast (CRB) approach which forms temporary clusters to limit broadcasts to cluster heads. One issue is that dynamically forming and maintaining up-to-date clusters comes with significant messaging overhead, especially under low-density conditions where membership changes frequently. Relying on a single cluster head (CH) also reduces resilience—if that node becomes disconnected due to mobility, it could disrupt message propagation within the affected cluster. Additionally, selecting the next CH based solely on distance may not always choose the optimum node to maximize coverage throughout the affected vehicular network. However, dynamically maintaining clusters incurs heavy overhead, especially under low densities. In 2021, [26] proposed a connected dominating set-based forwarding (CDSF) approach for traffic management in VANETs which identifies congested routes. However, CDSF neglects non-linear mobility patterns and does not fully address reliability issues or responsiveness required for practical traffic management in complex urban driving scenarios over a long duration.
Position-based methods leverage location metadata. In 2017, [23] introduced a protocol relying on message contents for rebroadcasting. However, relying only on static position fields may fail to promptly propagate alerts through changing topologies. Furthermore, [27] proposed the Velocity and Position-based broadcast suppression protocol to minimize storms through source vehicle metadata, avoiding periodic exchanges. Receivers calculate forwarding probability based on distance and speed. However, only considering distance/speed may lead to incorrect assessments over time. Performance could degrade under high loads without coordination. VP-CAST does not fully address reliability, coordination, and responsiveness to varying environments. In 2023, [28] proposed ASPBT for DSRC at intersections which divides areas into partitions based on density. However, details on beacon retransmissions are lacking. Additionally, in 2023, [29] proposed a geographic routing strategy called Trust-Based Geographical Routing (TBGR) to improve the reliability of emergency message delivery in vehicular networks. While TBGR improves performance, limitations include not factoring interference into link quality calculations and only simulating one attack type.
While these studies made progress, issues remained. Flooding schemes lack reliability under congestion without coordination. Clustering incurred sizable signaling costs and lacked fault tolerance. Also, it incurs high signaling overhead maintaining dynamic groups. Position-based routing depended too heavily on position heuristics without reaction to congestion, which may fail under changing topologies or high loads.
Much of the existing research focuses on RF systems for VANETs with little incorporation of the emerging VLC communication technology. Only a few authors suggested various hybrid VLC-RF systems for VANETs. Mainly, in [30] the authors compared the performance of a standalone VLC system using various modulation schemes. Then the performance of that VLC system is compared with that of a hybrid system which proved to offer long-distance transmission, link reliability, and an increase in the received information.
Moreover, little work has focused on optimizing hybrid systems specifically for emergency scenarios at intersections and congested roadways. Most evaluate general connectivity performance but do not examine techniques for maximizing the reliability of alert dissemination under disruptive conditions. There is a need to investigate coordination mechanisms, congestion-aware adaptation, and multi-hop forwarding methods for resilient emergency messaging.
This work develops advanced algorithms for emergency message routing and congestion management in vehicular networks. For emergency messaging, it leverages the directional nature of Visible Light Communications (VLC) to optimize the propagation of warnings throughout the affected area. A partitioning scheme assigns dedicated radio frequency RF and VLC resources to zones, minimizing interference. Optimization ensures emergency broadcasts simultaneously utilize all assigned channels for maximum reach. Store-and-forward routing extends connectivity between zones when needed.
For congestion handling, a centralized approach is taken where RSUs continuously monitor traffic flows to build real-time models. Clearance times are simulated under various strategies to score impacts on travel time, emissions, and user satisfaction. Strategies are classified by severity and vehicles vote on preferred options. Adaptive signals prioritize the selected strategy while maintaining coordination across adjacent areas. This data-driven technique aims to resolve congestion more efficiently through collaborative optimization of signaling, routing, and traffic throughput.
While hybrid RF-VLC systems show potential for addressing interferences and blockages faced by singular technologies, gaps remain in optimizing them specifically for timely emergency response:
- Prior work focuses on general connectivity but does not fully develop the coordination protocols required to ensure reliable message dissemination even when direct links are intermittent or disrupted.
- Existing approaches lack dynamic adaptation to changing traffic flows and topologies, limiting their responsiveness under real-world congestion.
- Bottlenecks at intersections where incidents are most critical are not comprehensively addressed. Scalable solutions optimized for these dense merge areas are needed.
- Proactive mitigation of emergent jams through predictive clearance strategies coordinated across network partitions has seen little attention.
Several key gaps our work aims to address include:
- Reliability of emergency alert dissemination: We investigate techniques like coordinated VLC/RF retransmissions and aerial-assisted routing to maximize reliability under high congestion/disruption conditions not fully addressed before.
- Responsiveness to dynamic traffic environments: The dynamic mapping of topology via real-time beaconing allows our system to adapt broadcasts/routing based on varying loads/topologies, improving emergency response time compared to static schemes.
- Resilience against intermittent link interruptions: Leveraging both short-range localized VLC and longer-range multi-hop RF routing provides redundancy that enhances dissemination even when direct connections are blocked.
- Scalability for dense intersection scenarios: Prior clustering/position-based methods may struggle in dense merging areas, but we propose a VLC/RF/aerial solution specifically optimized for these critical emergency zones.
3. System Model
3.1. Description
We propose a hybrid VLC-RF system for emergency messaging in vehicular networks, as shown in Figure 1.
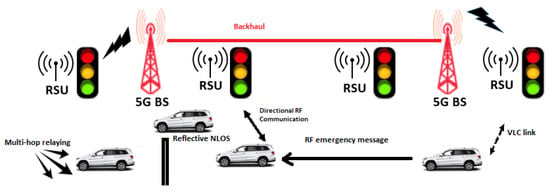
Figure 1.
Layout of our Model.
The system utilizes both VLC and RF to disseminate safety messages across vehicles and RSUs.
An IEEE 802.11p RF system provides wide-area coverage of hundreds of meters through omnidirectional signals. Due to fast fading in dynamic vehicular environments, a frequency-selective RF channel model is considered.
On the other hand, VLC uses forward-facing transmitters and receivers to enable LoS communication within tens of meters. We consider Avalanche Photo Diodes (APD) for reception. All vehicles and RSUs are equipped with both VLC and RF transceivers.
A few RSUs are co-located with traffic lights at intersections. This provides additional RF coverage directly within intersections where vehicles merge and cross paths. Intersections experience more obstructions of LoS VLC links. Co-locating RSUs helps boost RF strength in these dense areas to improve connectivity when direct VLC may be blocked.
Each RSU has a fixed broadcast zone/region based on its RF transmission power and propagation conditions. Vehicles can only be associated with one RSU at a time, whose broadcast zone they are located within. The model assumes sufficient but limited RSU deployment along roads/intersections such that vehicle movement between zones is possible but zones do not overlap. RSU schedules are transmitted via broadcast coordinate channel/frequency hopping across zones to neighboring vehicles as they hand off between cells.
RF broadcast links from RSUs are used to partition the coverage area into zones, then transmit schedules specifying RF/VLC channel/frequency hopping cycles and duration of the time slots. Vehicles associated with the RSU with the strongest signal, ensuring synchronization and receiving the correct schedule. RF signals are also used for emergency message broadcasts from any vehicle detecting an incident, allowing rapid dissemination to nearby vehicles.
Visible light links establish direct communication from vehicles to their associated RSU when LoS connectivity is available. This enables the real-time exchange of beacon messages containing location, speed, direction, and other data. This powers the RSU’s ability to build dynamic topology maps reflecting current traffic conditions. To preserve privacy, vehicles would not broadcast identifying information like license plates over VLC/RF. Safety messages would contain only cryptographically protected non-traceable IDs. Location data in broadcasts would also be coarse-grained to prevent the identification of individual vehicles. VLC provides some inherent location privacy due to its directional/short-range nature. Beacon transmissions alternate between directional RF and reliable LoS-based VLC in each time slot to maximize dissemination under differing radio environments.
In dense intersections, not all vehicles will necessarily have LoS VLC links to each other due to obstructions. Multi-hop relaying via both RF and VLC further extends the reach of critical messages if direct connections are obstructed.
The hybrid VLC-RF system allows for both direct communication between vehicles and RSUs when LoS is available, as well as multi-hop relaying and reflective NLoS connections when direct links are obstructed. While the system model focuses on the direct V2I links, the multi-hop functionality is implicitly included through the consideration of both VLC and RF technologies working in tandem. Relaying behaviors can leverage the same VLC/RF channel models.
Multi-hop relaying can utilize either VLC or RF links. For example, if a vehicle’s view of the RSU is blocked by another vehicle, it may act as a VLC relay node to pass messages to the vehicles that follow. Alternatively, parked vehicles alongside the road can act as reflective surfaces to enable NLoS VLC links between obstructed vehicles. Or if vehicles are out of RF range, multi-hop forwarding via RF extends the coverage. This multi-hop capability extends the reach of critical messages like accident/congestion notifications, ensuring safety information is disseminated as far as needed despite link interruptions.
In summary, Direct LoS VLC links will only be available between a subset of vehicles based on obstruction/spacing. NLoS is supported through reflections off parked vehicles. Multi-hop VLC/RF relaying extends the reach of safety messages for vehicles without direct connections. In mixed LoS/NLoS topologies, vehicles utilize the available VLC, RF, or multi-hop options based on their location and surrounding links. Very congested intersections may still rely more on RF broadcasts, acknowledging VLC limitations with total vehicle obstruction. VLC provides high bandwidth for real-time beaconing when LoS is available, powering dynamic topology maps. RF enables basic emergency alerts even when blocked, and partitions coverage into managed zones. Together they maximize dissemination and connectivity everywhere from open roads to dense intersections. These techniques are implicitly part of achieving comprehensive connectivity even in NLoS conditions or blockages, alongside direct LoS communication when available. Together this ensures critical safety messages disseminate as widely as needed.
This paper limits its scope to the rapid notification of accident and congestion information although there are several other potential message types that could be disseminated using our approach, such as road condition updates reporting slippery roads, potholes or debris, planned lane closure or roadwork alerts to guide traffic rerouting, weather alerts informing about upcoming heavy rain, emergency vehicle notifications to clear a path, just to name a few. In our work, we have considered two types of messages, i.e., accident information and congestion/traffic jam data. The accident information originates from the vehicle directly involved in the incident (i.e., source s) and must be back-propagated to the preceding vehicles that have not yet reached the location. The source located in the intersection (as illustrated in Figure 2—top) broadcasts the accident message simultaneously over its assigned VLC frequencies/beams and the RF channels. In an intersection (as illustrated in Figure 2—bottom), a hybrid VLC-RF system is considered and the region is divided into n regions of interest (ROI) zones. Only the vehicles located in these ROI zones that precede the source need to receive the emergency message. The proposed approach utilizes simultaneous VLC and RF broadcasts from the source vehicle, while spatially restricting the message region via zoning. This is intended to disseminate accident alerts efficiently to impacted vehicles in the surrounding area. By leveraging both technologies and restricting the broadcast region, the goal is to disseminate alerts to relevant vehicles without overloading those not directly affected.
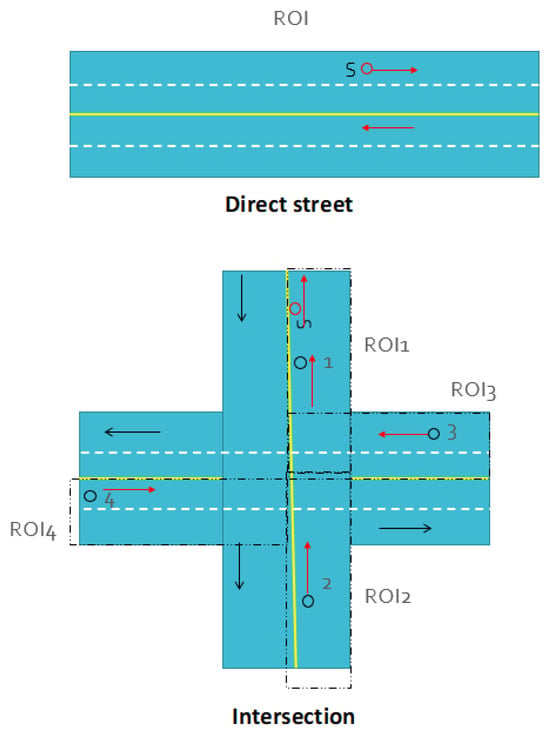
Figure 2.
Regions of interests for a direct street and an intersection.
3.2. Modeling the Channel for VLC and RF Links and the Multi-Hop Propagation
The received signal for the VLC link can be written as, [31,32]:
where, is the received signal, is the transmitted optical signal, is the optical channel impulse response (CIR), ∗ is the convolution. is the ambient noise, and is the photo-diode responsivity.
The CIR is given by [33,34]:
where, , denotes the time delay, and denotes the gain factor accounting for the losses and gains between the source s and the receiver r, and denotes the distance between the source s and the receiver r, denotes the impulse function, and c is the speed of light.
As shown in Figure 3, which represent transmitter, receiver, and reflector cars (Parked cars act as reflectors for the NLoS path. Reflectors have a dual property as they may act as transmitters or receivers depending on their role whether they are receiving from the source or sending to another node), where denotes the emitting angle between source s and receiver r, denotes the incident angle between source s and receiver r, denotes the effective area of the receiver, denotes the signal transmission coefficient of an optical filter, and denotes the gain of the optical concentrator.
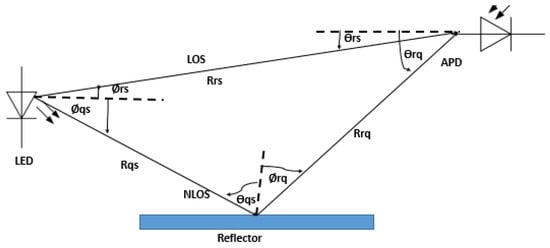
Figure 3.
Demonstration of angles in our model.
For RF communication, the CIR given by the time-varying multipath channel is [35],
where, m is the index of multipath components, is the number of multipath components, is the time-varying amplitude of the multipath component, is a ”persistence” Markov random process for the multipath component, is the phase associated to the path, , denotes the time delay between the transmitter and the receiver, and denotes the distance between the transmitter and the receiver.
Consider the following parameters: Received power at node j from transmitter i, transmit power , transmitter/receiver antenna gains and , transmitter-relay antenna gain , wavelength , distances and , path loss exponent , maximum hop count K, relay selection metric with criterion , path loss , and multi-hop RF CIR .
For direct V2I/V2V link between nodes i and j, to model the received power for a direct link (It follows the standard path loss model [36]):
For multi-hop links with k relays, we extend this model to a multi-hop path utilizing k intermediate relay nodes. The received power is calculated as the transmit power reduced by the product of each individual hop’s antenna gains , and attenuated by the propagation loss accumulated over each hop distance :
Equation (7) defines the relay selection metric used to select the best next hop relay node r for transmitter i. This considers the received power , and may also account for interference levels and medium contention levels to choose high-quality links.
Propagation path loss for multi-hop VLC link for a K-hop link between nodes i and j:
where is the path loss defined in Equation (3), and to are the intermediate relay nodes.
For a K-hop RF link between nodes i and j through relays to , the multi-hop RF CIR is:
where is defined in Equation (4), and ∗ represents the linear convolution of the individual RF CIRs for each hop.
These equations model the end-to-end multi-hop propagation and channel for the VLC and RF links.
4. Algorithm Description
In this section, the types of initial messages, the considered scenarios, and our proposed congestion management algorithm and emergency message routing protocol are described in depth.
4.1. Initial Messages
In our proposed routing protocol, the initial messages are of four types as follows:
RSU location broadcast: These are RSUs that transmit broadcast identification messages over the RF containing their zone assignments and schedules. These messages allow the vehicles to associate with the strongest signal RSU.
Vehicle association messaging: Upon receiving an RSU broadcast, vehicles respond with association messages to the corresponding RSU over both RF and VLC to establish the connection.
Beacon messaging: Once associated, the vehicles periodically send beacon updates to their RSU containing location, direction, speed, and other required data.
RSU scheduling: The RSU schedules alternate the RF and VLC transmission periods to maximize the reliable delivery of these status messages.
4.2. Considered Scenarios
In our proposed approach, the following scenarios are considered:
Front/rear-end collision scenario: This scenario depicts a collision between two vehicles in the direction of their vehicular axes. Typically, this involves the front end of one vehicle hitting the rear end of the vehicle in front of it. It should be noticed that front/rear accidents are the cause of the most injuries [34], accounting for around 40–50% of all reported vehicle accidents [37]. This makes them the most common collision configuration and scenario for which modeling the emergency notification dissemination is highly desirable.
Besides, the accident scenario is triggered by the following observation conditions: (a) a sudden impact is detected by the source vehicle, (b) the bumper-to-bumper distance between the source vehicle and the front/back vehicle is less than or equal to 0, indicating a contact, (c) the velocity of one or both vehicles decreases significantly upon the impact, and (d) the vehicles come to a stop shortly after the collision once the momentum is dissipated.
On another note, the accident clearance time is predicted based on several factors such as (a) the number of cars involved in the accident, (b) the number of lanes blocked, (c) the blocked lanes are unidirectional or bidirectional, (d) the traffic flow conditions, (e) the location of the accident, i.e., whether it is in an intersection, a regular road, in the middle of the road or on the sides.
Now, in the event of an accident, the source vehicle analyzes the real-time link qualities and simultaneously broadcasts the warning message on all its assigned RF/VLC channels and frequencies. Then, the receiving vehicles in the source’s zone re-forward the message using a VLC to vehicles behind them whenever possible. They will relay the message using the RF when the VLC links are obstructed. This information is also transmitted to the associated RSU to enable further broadcasting across the zones as needed. The vehicles that received the emergency message immediately switch their radios to the dedicated high-priority modes prepared by the RSU schedules. This prepares them to receive the subsequent emergency broadcasts with increased ranges. By leveraging the adaptive RF/VLC resource assignments using our proposed algorithm, the emergency notifications are efficiently propagated throughout the affected area in a manner that overcomes the dynamic propagation conditions.
Congestion scenario: This scenario involves detecting the congestion by gathering information about the positions and speeds of the vehicles using traffic view techniques [38]. Congestion is confirmed when any of the following factors has occurred: (a) the number of vehicles within a certain region exceeds a predefined threshold, (b) the average vehicle speed is below a certain threshold that is also far below the posted speed limit, or (c) the distance between vehicles within a certain region I below a certain threshold.
When a congestion situation is determined based on the above factors, the vehicles behind the source are informed about the congestion, its location, the start time, the current duration, and the predicted clearance time. Based on Table 1, the type of blocked lanes and the accident location are the two most influencing factors used to determine the predicted clearance time.

Table 1.
Comparison between Accident and Congestion in a high-density area.
4.3. Congestion Management Algorithm
In our proposed approach, in order to build a real-time traffic flow model, the RSU continuously monitors the beacon messages from the vehicles in its zone. When congestion is detected, the RSU utilizes this model to estimate the clearance times under different strategies, for instance, in the case of reduced speed vs. the case of rerouting. These strategies are assigned some scores based on their estimated impacts, using some parameters such as total travel time, emissions from idling plus stop-and-go traffic, road user satisfaction and stress levels, real-time traffic, calendar events, and weather. In fact, these strategies are divided into tiers based on the congestion severity. On the other hand, the messages sent to the vehicles include the congestion location and extent, the suggested strategy and potential alternate routes, the reasoning to gain the user trust and compliance, and the vehicles’ vote on the preferred strategy using V2I. It is then up to the RSU to select the highest-scoring strategy if there is consensus.
It should be noted that the adaptive signals at the intersections that border the congested area are controlled to prioritize a selected strategy, and the RSU continuously evaluates the effectiveness of this strategy and suggests some upgrades as needed, such as switching some strategies or extending the alternate routes based on the observed impacts. In such a process, a coordinated response across the adjacent zones for congestion spans multiple areas. Once either a collision or a congestion scenario is detected, an appropriate message is disseminated for the necessary actions to be taken.
The proposed congestion detection scheme introduces two key innovations:
- It leverages a hybrid RF/VLC system to collect real-time vehicular trajectory and traffic flow data. Specifically, RF signals are used to broadcast alerts and collect decentralized probe vehicle updates, while VLC is used for localized vehicle-to-infrastructure data sharing at intersections and congested spots.
- By fusing data from both the RF and VLC systems, the scheme is able to detect congestion in a more accurate, robust, and timely manner compared to conventional methods. The RF data provides a macro view of traffic flows over a wide area, while the localized VLC data at intersections provides micro-level visibility into vehicle interactions and queue formations.
The synergistic use of both communication technologies enables a level of traffic surveillance not possible with either system alone. By correlating anomalies or patterns observed in the RF and VLC datasets, the scheme can detect congestion even before queues fully form. It can also pinpoint the origins and spreading trends of congestion more precisely for effective response.
The steps of our proposed congestion management algorithm are described as follows:
Real-time traffic flow model design: As indicated earlier, to construct this model, the RSU continuously monitors the beacon messages from the vehicles in its zone. When congestion is identified, the traffic flow rate F is modeled using the Lighthill–Whitham–Richards (LWR) partial differential equation introduced in [39,40], which describes the continuum relationship between the traffic density and the flow F, i.e.,
where, is the vehicle density and is the flow-density relationship (for instance, the Greenshields model). This equation allows for the characterization of how the traffic conditions propagate through a road network. To do so, a proper calibration of the flow-density relationship to the local road characteristics is necessary for achieving accurate predictions.
Clearance time simulation: In our proposed model, the RSU simulates the clearance times under different strategies (i.e., reduced speed vs. rerouting). Indeed, this step is meant to estimate and compare how long it can take for different congestion mitigation strategies to clear the congestion and return the traffic flow to normal conditions. Specifically, a real-time traffic flow model is utilized to simulate the densities of the vehicles over the time and location that will result from each potential strategy, such as reduced speed limits, rerouting of vehicles to alternate routes, and changes in signal timings. Then, the predicted clearance time for each strategy is calculated by evaluating the integral of the density from the initial congested state to the density at the outflow point of the affected area. This helps quantify a key factor in evaluating the effectiveness of the strategy, i.e., how long will it take for this approach to resolve the congestion if implemented?
Comparing the clearance times () between the strategies allows our algorithm to objectively identify which options are expected to clear the roadway bottleneck in the least amount of time based on the traffic modeling simulations. Here, the purpose is to assign scores to the strategies based on their potential to shorten the duration of the vehicles’ experience of congestion delays by de-congesting the network as rapidly as possible.
Typically, for a reduced speed strategy vs. a strategy with normal speeds, we obtain the following:
where, are the densities over the time/location from the LWR model. Here, it should be noted that the real-time traffic, calendar events, and weather, are factored into the strategy selection, and the strategies are divided into tiers based on the congestion severity. These strategies are scored based on the total travel time, the emissions from the idling/stop-and-go traffic, and the road user satisfaction/stress levels.
Travel time impact scoring: This step is to provide a metric for evaluating and comparing how much each potential congestion mitigation strategy considered by the RSU can reduce travel times. Specifically, it helps in scoring and ranking the potential strategies based on their estimated ability to bring the travel times closer to the ideal free-flow condition. The strategies that achieve the larger travel time savings will receive a higher score. As the vehicles comply with the messages, the densities in the modeling equation should decrease over time and location. This indicates a de-congestion as the bottleneck is cleared. To calculate the score of a strategy, the following equation is utilized:
where is the actual travel time and is for each strategy from the LWR.
Emissions scoring: This step is to evaluate and rank the potential congestion mitigation strategies based on their estimated impact on the vehicle’s emissions levels during the clearance process. Specifically, it aims to quantify how much each considered strategy can reduce the emissions caused by the vehicle’s idling and stop-and-go traffic conditions associated with congestion. The emissions score is calculated as:
where and are the emissions rates from the idling and free-flow traffic, and is a weighting coefficient for the emissions scoring, which allows assigning relative importance to the emission impact compared to other scores.
It should be noted that the above-described travel time scoring and emissions scoring equations are meant to assume a gradual return to the free-flow conditions as the clearance proceeds.
User satisfaction/stress scoring: This step is to evaluate how each potential congestion mitigation strategy may impact the subjective experiences and perceptions of the road’s user. Specifically, it aims to score the strategies based on their estimated effects on three key factors that influence the user’s satisfaction or stress, namely:
- Safety: This is estimated using metrics such as the speed differentials which correlate to the crash risk perceptions.
- Delay: This is measured as the differences from the free-flow travel times since longer delays do lower satisfaction.
- Predictability: This is captured by the variability or uncertainty in the travel times, as higher predictability increases satisfaction.
The user’s satisfaction score is calculated as:
where is a weighting coefficient, and , , and are parameters that influence the subjective user’s perceptions. These parameters can be estimated based on objective traffic characteristics [28]. In our approach, (1) is estimated using characteristics like speed differentials between the vehicles. Higher speed differentials correspond to higher relative speeds, which correlate to drivers’ perceptions of increased crash risk and lower feelings of safety; (2) is estimated by calculating the delays experienced by the vehicles compared to the free-flow travel time on that road. A higher means lower user satisfaction. Higher such delays correspond to longer travel times and lower user satisfaction; and (3) is estimated by measuring the variability and uncertainty in the travel times using the standard deviation of these times. A higher variability or uncertainty in the travel times between the trips on the same route corresponds to a lower predictability or satisfaction for the users who value being able to reliably estimate their travel times.
The above-discussed strategies aim to minimize the total travel time and emissions while increasing the user’s satisfaction. All of these will be impacted positively as the traffic flows improve.
Vehicles can receive messages via V2V and V2I communications using both RF and VLC links. RF is used for initial message broadcasting from the source and subsequent multi-hop relaying between vehicles.
4.4. Proposed Routing Protocol
Algorithm 1 presents a high-level overview of the proposed routing protocol algorithm.
| Algorithm 1 Proposed Routing Protocol |
| Input: Traffic data T, interference maps I at each RSU Output: Optimal channel/beam assignments
|
VLC can supplement RF for direct line-of-sight V2I links between vehicles and RSUs. This provides an additional path for message dissemination when vehicles are in proximity to an RSU. Both RF channels and VLC frequencies/beams are uniquely assigned to zones based on traffic, interference metrics, and availability of reflective surfaces, using graph coloring/bin packing algorithms. Schedules define hopping sequences for assigned RF/VLC resources and synchronize vehicles. Schedules defining RF/VLC resource hopping sequences are broadcast regularly by RSUs. Vehicles associate with the best RSU and synchronize to its schedule to know when/how to transmit and receive the assigned resources. In normal operation, beacons can be split between RF and VLC depending on LoS/NLoS between vehicle and RSU or the availability of reflective surfaces. Topology maps are built from beacons over both RF and VLC links, accounting for nodes reachable via reflections off surfaces. Topology maps enable the selection of optimal alternate relay paths between zones if direct links are obstructed, to extend the message dissemination. During incidents, the source simultaneously broadcasts over all assigned RF/VLC resources to maximize coverage, including via reflections to extend range. Nearby vehicles switch radios to emergency mode over RF to receive/relay messages via multi-hop routing. If the direct VLC link fails, reflective multipath VLC paths or the RF beam can be used based on maps to maintain connectivity. Multi-hop relays extend connectivity between zones using both RF and VLC paths, depending on direct/reflective link availability.
In detail, our proposed routing protocol has the following steps:
Zones Identification: RSUs partition coverage into zones .
RSU Interference Maps: The interference maps at each RSU represent the interference conditions at that location and would need to be determined through measurement and modeling. The interference map would contain interference level measurements ( metric) for each zone over time. These measurements are likely collected by the RSUs periodically through RSSI/noise scans on different frequencies/channels in each zone. The maps provide input to the channel/frequency assignment functions and to account for interference limitations. Higher interference levels in a zone would mean fewer channels could be reused there safely.
The RSU interference maps collect RSSI, noise floor, and packet loss rate measurements. RSUs periodically scan channels by transmitting probing packets on each channel for a short time duration, while nearby vehicles listen and record signal strength, noise levels, and packet receipt success. These measurements are associated with spatial zones divided into grids, and stored in the map as averaged values per channel per zone over a given period. For new zones without vehicle data, typical values are assigned based on street proximity. The maps undergo rescan updates periodically, or more frequently if RSSI/noise exceeds thresholds. During updates, RSUs aggregate new vehicle measurement logs to refresh the averaged values. Maps are exchanged between neighboring RSUs periodically to synchronize, or immediately on triggered updates. The channel assignment algorithm runs periodically and then utilizes these maps by excluding any channels where RSSI/noise thresholds are exceeded in a zone, ensuring assignments avoid heavy interference areas.
Channel Assignment: Assign unique RF channels and VLC frequencies/beams to each zone based on traffic density and interference level using:
Equation (15) determines the unique RF channel assignments for zone ROIi. is the traffic density metric for zone , which can be calculated based on the average vehicle count in the zone over time. Higher densities mean more RF channels likely need to be assigned to support throughput needs.
is the interference level metric for zone . This can be evaluated based on RF noise measurements collected by the RSU over time at different locations in the zone. Higher interference means fewer RF channels can be reused in the zone. represents the assignment function run by the RSU, which takes into account the inverse relationship between density/interference and available RF channels. For this, RSU uses a graph-based channel assignment algorithm, which creates a graph that is made with zones as nodes and edges between zones indicating potential interference. Channels are represented as colors that can be assigned to zones The goal is to color the graph such that no two adjacent nodes share the same color/channel.
RSU would implement one such technique to systematically evaluate density and interference, and find acceptable , and mappings based on the interference constraints modeled.
Let be the interference graph with zones as nodes V and edges E representing interference constraints.
Define C as the set of available channel colors, = weight of node i based on density , and = interference between nodes i and j.
The channel assignment function can then be expressed as:
The objective function for a candidate channel coloring c is:
where we are finding the channel assignment c that maximizes density benefits while avoiding interference constraints represented by the graph edges, the first term captures density benefits of assigning channel to node i based on its weight (which represents traffic density ). Higher is better, and the second term penalizes interference from adjacent nodes having the same color. is a constant parameter that helps balance the two terms in the objective function . controls the relative importance/weight given to avoiding interference versus gaining density benefits from the assignment. A higher value emphasizes avoiding interference more, while a lower prioritizes density benefits even if it allows some interference.
is the channel color of node i, is 1 if x = y; 0 otherwise,
Equation (18) assigns unique VLC channels/beams to zone based on similar considerations as RF assignments. is again the assignment function capturing the trade-off between coverage needs due to density and limitations due to interference conditions VLC beam orientations, widths, and frequencies selected aim to reliably reach the expected number of vehicles in while avoiding inter-zone interference issues. For this, we can use the bin packing algorithm, which treats densities as “items” to pack into “bins” which are VLC channels, then greedily assigns frequencies starting from zones with the highest density and packs into the fullest bin first to minimize the number of bins/frequencies used.
The bin packing formulation finds the minimum number of frequencies from the available set F to assign all ROI weights W while respecting bin capacities B (B is the set of frequency bin capacities ) and avoiding interference I. Let F be the set of available VLC frequencies (bins), is the weight of ROI i based on density (item size), is the capacity of frequency bin f, and is the interference between ROIs i and j.
The bin packing formulation treats as items to pack into bins f while respecting interference constraints.
Specifically, aims to minimize the number of bins/frequencies used:
Subject to:
where ensures that the assigned frequencies are chosen from the available set of frequencies F. This confines the solution to the feasible space. guarantees that each ROI weight is assigned only one frequency bin . It enforces a one-to-one mapping between weights and bins. requires the total weight packed in any single bin cannot exceed the capacity of that bin. It avoids overfilling frequency channels. For any pairs of ROIs i,j that interfere (), allocates their weights , to different bins and . It ensures interfering weights do not share the same frequency.
Schedule Publishing: After RSU determines all available RF channels and VLC frequencies/beams that can be used across different zones, RSUs broadcast schedules S over RF and VLC. The S contains the set of hopping sequences for RF channels/VLC frequencies of channels/frequencies and transmission time, with as the set of all time slot allocations. The RSU defines hopping sequences for each resource, specifying the cyclic order in which the resource will hop between other candidates over time.
where h is a schedule, is the end time of vehicle n, is the ideal finish time. This chooses schedule h to minimize latency variance from optimal time. () is simply calculating the error/difference between the actual time and desired/target time . The indicates rectification. This sets any negative errors/differences equal to 0. So if () was negative, it would be truncated to 0.
The S is broadcast periodically by the RSU to synchronize all the vehicles. Resources are dynamically hopped per S to enhance throughput over time as traffic patterns change.
Association: Vehicles are associated with the best RSU using the received signal strength indicator (RSSI) as given in Equation (22)
The RSSI would be based on the schedule S broadcast periodically by the RSU, as S contains the hopping sequences and time slots defining when and how the assigned RF/VLC resources for that RSU’s zone.
Beacon Splitting: The RSU divides the beacon B transmitted by the vehicles at location L over RF into or depending on NLoS or LoS as shown.
Topology Map Building: The RSU uses the beacons to build topology maps M. The maps contain node locations L and connectivity links as .
The RSUs will then run optimization algorithms to maximize throughput T while meeting interference, I less than a threshold .
The model interference I refers to predicted/estimated interference between nodes based on their locations, connectivity, and assigned resources. I is modeled/calculated based on the topology map M, which contains nodes’ positions L and links . The goal is to maximize throughput T across the network. However, resource assignments cannot exceed a certain interference threshold, captured by . So it is indeed a maximization of T, subject to the constraint that interference I stays below a set level.
Incident Handling: In emergencies, the source s simultaneously broadcasts accident message A over all assigned RF/VLC channels C and frequencies F using maximum transmit power . This is to ensure the message reaches the greatest possible number of vehicles immediately. Here, is the maximum allowable transmit power that devices are permitted to use for emergency broadcasts according to regulations. This is usually higher than the typical/normal transmit power level used under regular conditions. The is predefined based on things like device antenna class/power class, allowed equivalent Isotropic radiated power, proximity to safety-critical systems, and interference considerations.
Mode Switching: When a receiver r detects an emergency message A from source s, it immediately switches its radio to an emergency mode . The goal of is to maximize the range R over which r can receive/relay the emergency message. The R depends on factors like transmit power, antenna gain, and radio hardware limits. The is defined as a function of R that configures the radio parameters to achieve the increased range R.
Message Rebroadcasting: Receivers r rebroadcast messages A containing hop count H simultaneously over assigned resources C and F:
Multi-hop Relaying: Vehicles participate in multi-hop relaying to extend connectivity. The optimal next hop for message forwarding is chosen to maximize network coding gains N:
If the VLC link is disrupted, a low-bandwidth RF link will be used. Then the RF beam will reorient (realign) to the optical transmitter/receiver with angle to the RSU:
Multi-hop relays extend connectivity between zones if direct links are obstructed, allowing store-and-forward rerouting of critical messages. The RSU uses its maps M to determine the optimal alternate path that maximizes the probability of delivery P.
5. Simulation and Performance Analysis
In our simulation, we used Sumo 0.19 to construct the mobility road area and map. We also considered Omnet++ version 4.6 for the network simulation. The UDP packets are generated and transmitted using IEEE 802.11p standard at the MAC layer for the RF links. For short-range VLC, a physical layer model based on the IEEE802.15.7 standard [41] is implemented using OMNET++. Transmitter parameters (Ex: optical power and transmitter model) are defined on the transmitter side and photo-diode parameters are defined on the receiver side. The parameters of the optical channel are also defined. The transmitter passes the optical information (Ex: bit rate, signal bandwidth, optical power, etc.) to the receiver.
For simulation and evaluation, the number and locations of RSUs along road segments are predetermined based on expected traffic densities and ensuring full coverage of their broadcast zones with limited overlap, as described earlier. Table 2 shows the parameters that we used in our simulation. The model assumes a fixed RSU infrastructure is in place along major roads to partition the coverage area into manageable zones. While vehicles dynamically associate with the nearest RSU, the RSU positions themselves remain static for a given simulated road topology.
Table 2.
Simulation Parameters.
The number of times the method changed between VLC and RF depended on the vehicle locations and movements relative to the RSU zones. Vehicles entered the network randomly and drove between zones following mobility models. On average, there were 3–8 handovers per vehicle as it drove between zones with different assigned radio technologies (VLC or RF). This was primarily due to the RSU optimizing assignments based on real-time density/interference metrics in each zone. Where direct VLC/RF links between zones were obstructed due to sparse traffic or high interference or at zones at opposite ends of the network, multi-hop routes of up to 10 hops were observed to maximize delivery probability. When a VLC link failed due to occlusion or mobility, the RF beam was realigned to the RSU within 50 ms.
Figure 4 demonstrates the effectiveness of the management plan in resolving the troubled traffic conditions from the initial accident through widening congestion to the impact of strategies. The figures were intended merely as a demonstrative aid, to qualitatively illustrate the four stages of accident propagation and congestion development over time.
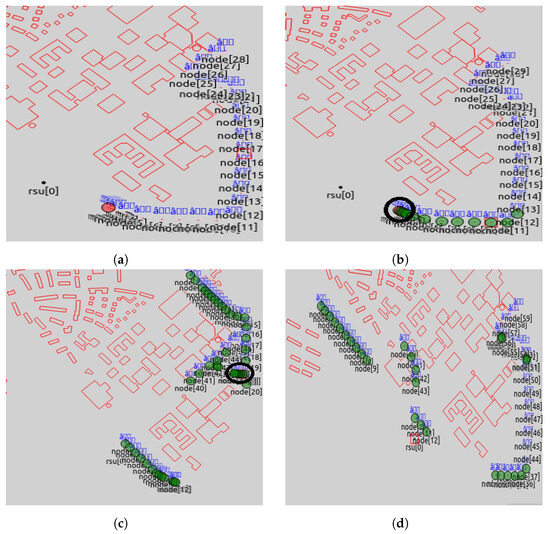
Figure 4.
Evolution of traffic conditions following an accident and the impact of congestion management strategies. (a) A collision is reported at the red circle while vehicles are smoothly moving; (b) Initial congestion status due to the accident. (c) Congestion after some time without congestion management. (d) Congestion alleviation with effective congestion management.
The traffic flow on the highway was proceeding smoothly as vehicles traveled down the road. Cars were moving steadily in lanes at the posted speed limit, with adequate spacing between each vehicle. However, an unexpected collision suddenly occurred at a specific location, as marked by the red circle in Figure 4a.
Figure 4a provides a visual depiction of the sudden collision that disrupted the traffic stream at this point on the road. It shows an aerial view of the highway. Within the red circle, several vehicles can be seen merging together, indicating they have impacted each other. The collision seemed to come as a surprise, as cars behind the point of impact continued flowing smoothly without any signs of braking or swerving maneuvers. Leading up to the red circle, there did not appear to be any irregular driving behaviors that might have forewarned of an imminent accident.
Figure 4b depicts the immediate aftermath of the collision and illustrates how traffic conditions began to deteriorate in the region following this accident. The highway stretch has been represented using a more abstract model, with individual vehicles replaced by nodes shown as green circles. These nodes reflect clusters of vehicles gradually forming on the road as congestion emerges. The tight pack of nodes at the site of the original collision suggests vehicles have bottle-necked here after the accident disrupted the flow. The initial accident served as a perturbation that caused traffic to transform from free-flow to an increasingly jammed flow. Over time, without any active congestion management strategies, the traffic conditions continued to worsen.
Next, in Figure 4c, we see a more extensive spreading of the node clusters representing vehicles, indicating congestion has now impacted a much larger stretch of the highway. We also see a highly irregular pattern with multiple dense pockets forming. This underscores the non-uniform and dynamic nature of how congestion can propagate. The peak node concentration, marked with a black circle, is now situated at a different point on the road than the red circle highlighting the original accident location. This suggests congestion tendencies can shift spatially over time without interventions. Areas around the peak node cluster see heavily impeded flows with vehicles barely inching forward, represented by the tightly packed nodes. Upstream flows have also worsened leading to this bottleneck region.
Figure 4d now depicts the impact of applying our active congestion management scheme to the troubled highway network. The node clusters representing vehicles appear significantly more sparse and uniformly spaced throughout the modeled stretch. This indicates that the congestion levels have been dramatically reduced after implementing the proposed management plan.
Figure 5 shows a comparison of the probability density distributions for clearance times in two different traffic disruption scenarios—an accident versus congestion. The y-axis represents the probability density, which indicates the likelihood of a given clearance time range. For both scenarios, the x-axis charts the time in minutes since the incident occurred. The probability densities were estimated based on historical traffic data recording clearance times for accidents vs. congestion incidents. The data contains a sample of recorded clearance time durations for each scenario. A probability density function could then be fit to each data sample, defining the likelihood of various clearance time ranges.
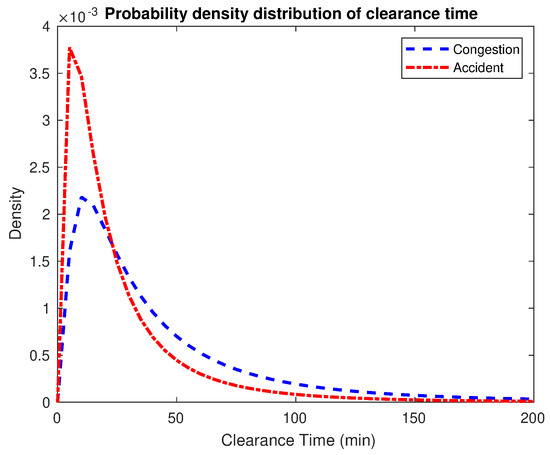
Figure 5.
Probability Density Functions of accident congestion scenarios.
In the case of an accident, the peak density is higher at 3.75 within the first few minutes following the incident. This indicates there is a greater chance of the accident being cleared relatively quickly during this initial period. However, for congestion, the peak density is lower at around 2.2. This suggests incidents of congestion typically take longer to initially clear compared to accidents.
As time progresses, both probability density curves gradually decrease. But the accident curve shows a steeper fall-off, meaning the likelihood of extended clearance duration is lower for accidents versus congestion cases.
Figure 5 reveals that while accidents tend to have a higher initial clearance rate, congestion is generally more persistent over longer durations from when it first arises on the road network. This gives important insights into how different incident types impact clearance time dynamics.
Table 1 shows the effect of various factors on clearance time based on results obtained from our algorithm. The times reported represent the average/typical cases. It provides estimated percentages for the relative impact of each factor based on traffic modeling. The number of vehicles involved has the largest effect for both, reflecting how more cars result in greater disruption and longer clearance efforts. However, its impact is larger for congestion. More blocked lanes extend clearance as fewer lanes are available for traffic diversion. Lane type and location have moderate impacts, as certain lanes (e.g., fast vs. slow lanes) affect response abilities more than others. Accidents see a greater location effect due to varied emergency access.
Figure 6 compares the performance of three different network systems: a standalone VLC system, a hybrid RF-VLC system, and the standard AODV routing protocol [42,43] using RF only.
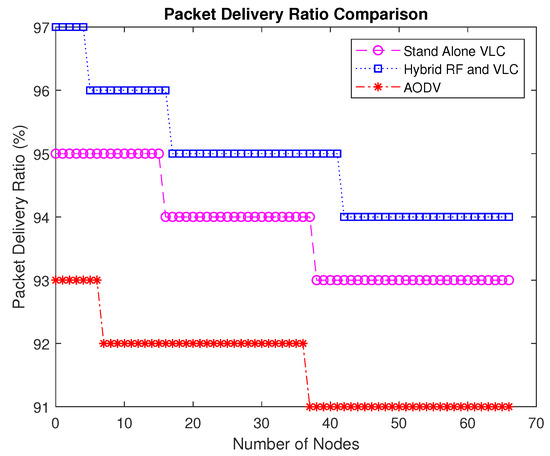
Figure 6.
Packet Delivery Ratio.
The standalone VLC system demonstrates a lower packet delivery ratio compared to the hybrid RF-VLC system. This is due to the line-of-sight limitations of VLC, wherein packets can only be transmitted if the transmitter and receiver have a clear visual path.
In the hybrid system, initial broadcasting of packets occurs using RF channels rather than VLC. This enables a broader coverage area for initiating transmissions. Then, at the forwarding stage between intermediate nodes, VLC is used on a hop-by-hop basis wherever the visual path is available.
Compared to RF-only communication which has an average range of several hundred meters, VLC has a shorter range of approximately 20–30 m. However, in dense traffic scenarios where nodes are located close together, VLC can provide good connectivity between vehicles. The hybrid approach effectively leverages the benefits of both RF and VLC to optimize overall network performance.
In summary, by combining initial broadcasting via RF with subsequent hop-by-hop transmissions using VLC, the hybrid RF-VLC system is able to achieve greater packet delivery reliability than a standalone VLC system hampered by line-of-sight constraints. It also outperforms the conventional AODV protocol that uses pure RF transmissions.
Figure 7 compares the broadcast transmission delays between the different network approaches. Transmission delay is measured as the time taken for a packet to reach its destination, starting from the point of origination and including the forwarding stages between intermediate nodes. Transmission delay depends directly on the distance a packet must travel—the farther the distance, the longer it will take to transmit. Assuming a constant transmission speed/bitrate, we would expect a direct proportional (linear) increase in delay as distance increases. i.e., doubling the distance doubles the transmission time. Factors like node processing time, propagation delays, etc. are relatively small contributions compared to transmission time over varying distances in this range (50–2000 m). The nature of radio/wireless propagation means signal strength decays predictably with distance traveled in most conditions, following an inverse square law. This translates to transmission delay, functionally increasing in direct proportion to distance. Due to its short transmission range of 20–30 m, standalone VLC systems demonstrate significantly longer delays, because of more hops before finally reaching the destination, compared to the other options. The AODV protocol that uses only RF, performs better than pure VLC since RF provides a longer communication range between nodes (fewer hops).
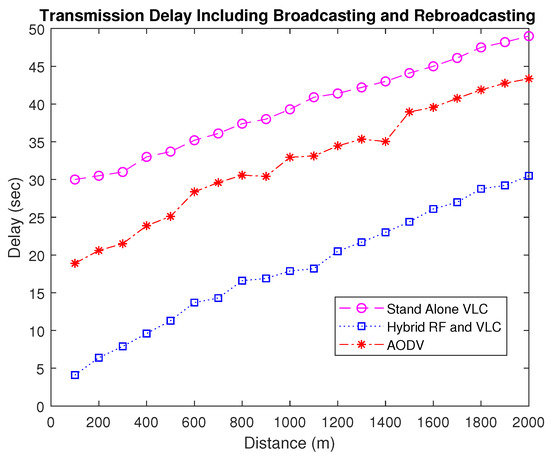
Figure 7.
Transmission Delay including Broadcasting plus Rebroadcasting.
However, the hybrid RF-VLC system achieves the lowest transmission delays. This is performed by initiating RF broadcasts to establish a wider coverage at the first stage. However, it uses high-bandwidth VLC links at later stages. This hybrid approach reduces the overall number of forwarding hops required. This strategy leverages the strengths of both RF and VLC technologies to minimize the end-to-end delay.
The combined RF-VLC system delivers packets to their destinations in the least amount of time due to efficiently exploiting the long-range and high-data capabilities of RF and VLC, respectively, across the different transmission stages. This validates the performance benefits of an integrated hybrid network architecture.
Figure 8 directly compares the number of congested vehicles over time both with and without applying our protocol. It clearly shows that the curve with congestion management constantly remains below the curve without congestion management, at all time intervals across the entire simulation duration. The scenario is event-driven (accident at t = 75 s) and so results focus only on the time period after that event.
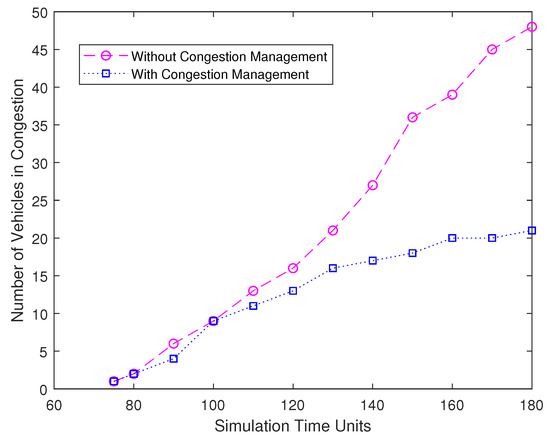
Figure 8.
Number of Congested Vehicles after an Accident.
This demonstrates the algorithm’s ability to promptly detect accidents or bottlenecks and route vehicles onto alternate congestion-free routes before queuing kicks in. As a result, fewer vehicles accumulate in crowded areas at any given time compared to the situation without mitigation actions.
6. Conclusions
In this paper, we have proposed an adaptive routing protocol for emergency message dissemination in vehicular networks using both RF and VLC communications. When an accident or congestion happens, the source vehicle and the RSU disseminate the information to the incoming vehicles as fast as possible using a combination of VLC and RF channels. The receiving vehicles immediately switch to emergency modes. The multi-hop relays extend the connectivity if the direct links are blocked. In order to minimize interference, the coverage area is partitioned into zones based on the road segments, intersections, and traffic flows. The RSUs are assigned to zones and analyze the historical traffic data to characterize each zone. Unique RF channels and VLC channels/beams are assigned by the RSUs, considering the bandwidth, throughput, and interference. The RSU schedules the channel hopping cycles and time slots, and the beacon periods alternate between directional RF and LoS VLC. The RSUs also build the topology maps and run the optimization algorithms for the resource assignments in order to minimize interference while maximizing the throughput.
We also proposed a novel congestion detection scheme utilizing traffic simulations to forecast the clearance times under different response strategies. The strategy that yields the lowest impact on travel time, emissions, and driver stress is selected. The selected strategy is then proactively used to alleviate the predicted congestion through optimized routing and control. Both prioritized dissemination and dynamic congestion mitigation are evaluated to optimize the safety and traffic flow.
Simulation findings show that the hybrid RF-VLC system achieves an improvement in the system metrics compared to other techniques. It demonstrates the lowest packet loss and transmission delay, with the highest coverage range and the probability of emergency messages being rebroadcast. Also, the results show an improvement in quick congestion alleviation using our congestion management algorithm compared to other approaches. However, more complex environments with additional interference sources were not modeled. Also, a larger simulation area and duration would be needed to fully evaluate the scalability and robustness of the proposed algorithm. The obtained results are applicable specifically to the used configurations, and may differ for other settings. Applying this algorithm for diverse vehicle applications also needs more investigation.
In summary, this work presents an adaptive routing protocol for emergency dissemination across partitioned zones, where the RSUs dynamically assign the RF/VLC resources to optimize the coverage while minimizing interference. The proposed congestion detection scheme selects the response strategies to proactively mitigate the predicted congestion. The proposed protocol maximizes safety through prioritized routing and congestion forecasting.
Author Contributions
Conceptualization, N.H., X.F. and I.W.; methodology, N.H.; software, N.H.; validation, N.H. and X.F.; formal analysis, N.H.; investigation, N.H. and X.F.; resources, N.H.; data curation, N.H.; writing—original draft preparation, N.H.; writing—review and editing, N.H., X.F. and I.W.; visualization, X.F.; supervision, X.F. and I.W.; project administration, X.F.; funding acquisition, X.F. and I.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been supported in part by NSERC CRD Grant held by the 2nd author, and the Faculty of Science Dean’s Postdoctoral Fellowship grant, Toronto Metropolitan University, held by the 3rd author.
Data Availability Statement
The data referenced are contained within the article itself.
Acknowledgments
Authors would like to acknowledge Wisam Farjow for the funding help.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| VANET | Vehicular Ad-hoc Network |
| MANET | Mobile Ad-Hoc Network |
| RF | Radio Frequency |
| VLC | Visible Light Communication |
| LoS | Line of Sight |
| NLoS | Non Line of Sight |
| OBU | Onboard Unit |
| DSRC | Dedicated Short Range Communications |
| SRC | safety Related Critical |
| ITS | Intelligent Transport Systems |
| V2V | Vehicle-to-Vehicle |
| RSU | Roadside Unit |
| V2I | Vehicle-to-Infrastructure |
| WSM | WAVE Short Message |
| LED | Light Emitting Diode |
| UMBP | Urban Multi-hop Broadcast Protocol |
| CRB | Cluster-Based Recursive Broadcast |
| CH | Cluster Head |
| CDSF | ConnectedDominating Set-based Forwarding |
| VP-CAST | Velocity and Position-based Broadcast Suppression |
| TBGR | Trust-Based Geographical Routing |
| APD | Avalanche Photo Diode |
| ROI | Region of Interest |
| CIR | Channel Impulse Response |
| UDP | User Datagram Protocol |
| LWR | Lighthill-Whitham-Richards |
| RSSI | Received Signal Strength Indication |
| C-V2X | Cellular Vehicular-to-Everything |
| V2X | Vehicular-to-Everything |
References
- Abdelkader, G.; Elgazzar, K.; Khamis, A. Connected Vehicles: Technology Review, State of the Art, Challenges and Opportunities. Sensors 2021, 21, 7712. [Google Scholar] [CrossRef] [PubMed]
- Mahi, M.J.N.; Chaki, S.; Ahmed, S.; Biswas, M.; Kaiser, M.S.; Islam, M.S.; Sookhak, M.; Barros, A.; Whaiduzzaman, M. A review on VANET research: Perspective of recent emerging technologies. IEEE Access 2022, 10, 65760–65783. [Google Scholar] [CrossRef]
- Bedford, M.D.; Kennedy, G.A.; Foster, P.J. Radio transmission characteristics in tunnel environments. Min. Technol. 2017, 126, 77–87. [Google Scholar] [CrossRef]
- Hussein, N.H.; Yaw, C.T.; Koh, S.P.; Tiong, S.K.; Chong, K.H. A Comprehensive Survey on Vehicular Networking: Communications, Applications, Challenges, and Upcoming Research Directions. IEEE Access 2022, 10, 86127–86180. [Google Scholar] [CrossRef]
- Patil, A.; Muthuchidambaranathan, P.; Shet, N.S.V. Congestion control mechanisms in vehicular networks: A perspective on Internet of vehicles (IoV). In Autonomous and Connected Heavy Vehicle Technology; Elsevier: Amsterdam, The Netherlands, 2022; pp. 211–224. [Google Scholar]
- Balzano, W.; Lanuto, A.; Mascia, C.; Stranieri, S. Hierarchical VANET: A Traffic Congestion Management Approach Based on Critical Points. In Proceedings of the International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, Tirana, Albania, 27–29 October 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 192–202. [Google Scholar]
- Subramaniam, M.; Rambabu, C.; Chandrasekaran, G.; Kumar, N.S. A traffic density-based congestion control method for VANETs. Wirel. Commun. Mob. Comput. 2022, 2022, 7551535. [Google Scholar] [CrossRef]
- Mohammed, N.; Kadhim, R.A. Congestion Control in VANETs based on Message Rate Adaptation by the Exponential Function. In Proceedings of the 2022 5th International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Online, 8–9 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 24–28. [Google Scholar]
- Sudhamani, C.; Roslee, M.; Tiang, J.; Rehman, A. A Survey on 5G Coverage Improvement Techniques: Issues and Future Challenges. Sensors 2023, 23, 2356. [Google Scholar] [CrossRef] [PubMed]
- Fung, C.C.; Yogarayan, S.; Razak, S.F.A.; Azman, A. A Review Study of IEEE 802.11 p On-Board Unit for V2X Deployment. In Proceedings of the 2023 11th International Conference on Information and Communication Technology (ICoICT), Melaka, Malaysia, 23–24 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 165–171. [Google Scholar]
- Cruz, L.E.P. Visible Light Communication Control in a Platoon Vehicle Environment. Ph.D. Thesis, Université Paris-Saclay, Paris, France, 2022. [Google Scholar]
- Banani, S.; Gordon, S.; Thiemjarus, S.; Kittipiyakul, S. Verifying Safety Messages Using Relative-Time and Zone Priority in Vehicular Ad Hoc Networks. Sensors 2018, 18, 1195. [Google Scholar] [CrossRef]
- Muzahid, A.J.M.; Kamarulzaman, S.F.; Rahman, M.A.; Murad, S.A.; Kamal, M.A.S.; Alenezi, A.H. Multiple vehicle cooperation and collision avoidance in automated vehicles: Survey and an AI-enabled conceptual framework. Sci. Rep. 2023, 13, 603. [Google Scholar] [CrossRef]
- Shabir, B.; Khan, M.A.; Rahman, A.U.; Malik, A.W.; Wahid, A. Congestion Avoidance in Vehicular Networks: A Contemporary Survey. IEEE Access 2019, 7, 173196–173215. [Google Scholar] [CrossRef]
- Malik, S.; Sahu, P. A comparative study on routing protocols for VANETs. Heliyon 2019, 5, e02340. [Google Scholar] [CrossRef]
- Wahid, I.; Ikram, A.A.; Ahmad, M.; Ali, S.; Ali, A. State of the art routing protocols in VANETs: A review. Procedia Comput. Sci. 2018, 130, 689–694. [Google Scholar] [CrossRef]
- Shaaban, K.; Shamim, M.H.M.; Abdur-Rouf, K. Visible light communication for intelligent transportation systems: A review of the latest technologies. J. Traffic Transp. Eng. 2021, 8, 483–492. [Google Scholar] [CrossRef]
- Yin, R.R.; Cui, X.; Liu, S.; Song, X.; Zhu, H.H.; Ma, X. An intelligent clustering algorithm based on hybrid RF/VLC communication model for VANET. In Proceedings of the 2022 13th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 76–81. [Google Scholar]
- Obeed, M.; Salhab, A.M.; Alouini, M.S.; Zummo, S.A. On Optimizing VLC Networks for Downlink Multi-User Transmission: A Survey. IEEE Commun. Surv. Tutor. 2019, 21, 2947–2976. [Google Scholar] [CrossRef]
- Patil, P. A Survey on Emergency Message Transmission Protocol in VANET with Message Type Recognition: A Modified Neural Network Architecture. In Proceedings of the 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 20–22 February 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Abuella, H.; Elamassie, M.; Uysal, M.; Xu, Z.; Serpedin, E.; Qaraqe, K.A.; Ekin, S. Hybrid RF/VLC Systems: A Comprehensive Survey on Network Topologies, Performance Analyses, Applications, and Future Directions. IEEE Access 2021, 9, 160402–160436. [Google Scholar] [CrossRef]
- Bi, Y.; Shan, H.; Shen, X.S.; Wang, N.; Zhao, H. A multi-hop broadcast protocol for emergency message dissemination in urban vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2015, 17, 736–750. [Google Scholar] [CrossRef]
- Dong, W.; Lin, F.; Zhang, H.; Yin, Y. A cluster-based recursive broadcast routing algorithm to propagate emergency messages in city VANETs. In Proceedings of the 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, China, 6–8 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 187–190. [Google Scholar]
- Boucetta, S.I.; Johanyák, Z.C. Optimized ad hoc multi-hop broadcast protocol for emergency message dissemination in vehicular ad hoc networks. Acta Polytech. Hung. 2022, 19, 23–42. [Google Scholar] [CrossRef]
- Tian, D.; Liu, C.; Duan, X.; Sheng, Z.; Ni, Q.; Chen, M.; Leung, V.C. A distributed position-based protocol for emergency messages broadcasting in vehicular ad hoc networks. IEEE Internet Things J. 2018, 5, 1218–1227. [Google Scholar] [CrossRef]
- Karpagalakshmi, R.C.; Vijayalakshmi, P.; Gowsic, K.; Rathi, R. An Effective Traffic Management System Using Connected Dominating Set Forwarding (CDSF) Framework for Reducing Traffic Congestion in High Density VANETs. Wirel. Pers. Commun. 2021, 119, 2725–2754. [Google Scholar] [CrossRef]
- Khan, A.; Siddiqui, A.A.; Ullah, F.; Bilal, M.; Piran, M.J.; Song, H. VP-CAST: Velocity and position-based broadcast suppression for VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18512–18525. [Google Scholar] [CrossRef]
- Ramya Devi, M.; Jasmine Selvakumari Jeya, I.; Lokesh, S. Adaptive scheduled partitioning technique for reliable emergency message broadcasting in VANET for intelligent transportation systems. Automatika 2023, 64, 341–354. [Google Scholar] [CrossRef]
- Su, B.; Tong, L. Transmission Protocol of Emergency Messages in VANET Based on the Trust Level of Nodes. IEEE Access 2023, 11, 68243–68256. [Google Scholar] [CrossRef]
- Momen, M.M.A.; Fayed, H.A.; Aly, M.H.; Ismail, N.E.; Mokhtar, A. An efficient hybrid visible light communication/radio frequency system for vehicular applications. Opt. Quantum Electron. 2019, 51, 364. [Google Scholar] [CrossRef]
- Farahneh, H.; Mekhiel, C.; Khalifeh, A.; Farjow, W.; Fernando, X. Shadowing effects on visible light communication channels. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Farahneh, H.; Hussain, F.; Fernando, X. Performance analysis of adaptive OFDM modulation scheme in VLC vehicular communication network in realistic noise environment. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 243. [Google Scholar] [CrossRef]
- Fernando, X.; Farahneh, H. Visible Light Communications; IOP Publishing: Bristol, UK, 2019; pp. 2053–2563. [Google Scholar] [CrossRef]
- Schulze, H. Frequency-domain simulation of the indoor wireless optical communication channel. IEEE Trans. Commun. 2016, 64, 2551–2562. [Google Scholar] [CrossRef]
- Hlawatsch, F.; Matz, G. Wireless Communications over Rapidly Time-Varying Channels; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Klozar, L.; Prokopec, J. Propagation path loss models for mobile communication. In Proceedings of the 21st International Conference Radioelektronika 2011, Brno, Czech Republic, 19–20 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–4. [Google Scholar]
- Council, N.S. Type of Crash. 2021. [Google Scholar]
- Nadeem, T.; Dashtinezhad, S.; Liao, C.; Iftode, L. TrafficView: Traffic data dissemination using car-to-car communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 6–19. [Google Scholar] [CrossRef]
- Mazaré, P.E.; Dehwah, A.H.; Claudel, C.G.; Bayen, A.M. Analytical and grid-free solutions to the Lighthill–Whitham–Richards traffic flow model. Transp. Res. Part B Methodol. 2011, 45, 1727–1748. [Google Scholar] [CrossRef]
- Qiu, S.; Abdelaziz, M.; Abdellatif, F.; Claudel, C.G. Exact and grid-free solutions to the Lighthill–Whitham–Richards traffic flow model with bounded acceleration for a class of fundamental diagrams. Transp. Res. Part B Methodol. 2013, 55, 282–306. [Google Scholar] [CrossRef]
- Ley-Bosch, C.; Medina-Sosa, R.; Alonso-González, I.; Sánchez-Rodríguez, D. Implementing an IEEE802. 15.7 physical layer simulation model with OMNET++. In Proceedings of the Distributed Computing and Artificial Intelligence, 12th International Conference, Salamanca, Spain, 3–5 June 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 251–258. [Google Scholar]
- Liu, S.; Yang, Y.; Wang, W. Research of AODV routing protocol for ad hoc networks1. AASRI Procedia 2013, 5, 21–31. [Google Scholar] [CrossRef]
- Royer, E.M.; Perkins, C.E. An implementation study of the AODV routing protocol. In Proceedings of the 2000 IEEE Wireless Communications and Networking Conference, Conference Record (Cat. No. 00TH8540), Chicago, IL, USA, 23–28 September 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 3, pp. 1003–1008. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).