Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review and Related Works
- Filter types and their effects on the quality of service: selected filter type directly determines the system limitation on interference mitigation. The amount of transmitted data that is removed by the filter gaps from the desired signal spectrum is an essential point for preserving the quality of service.
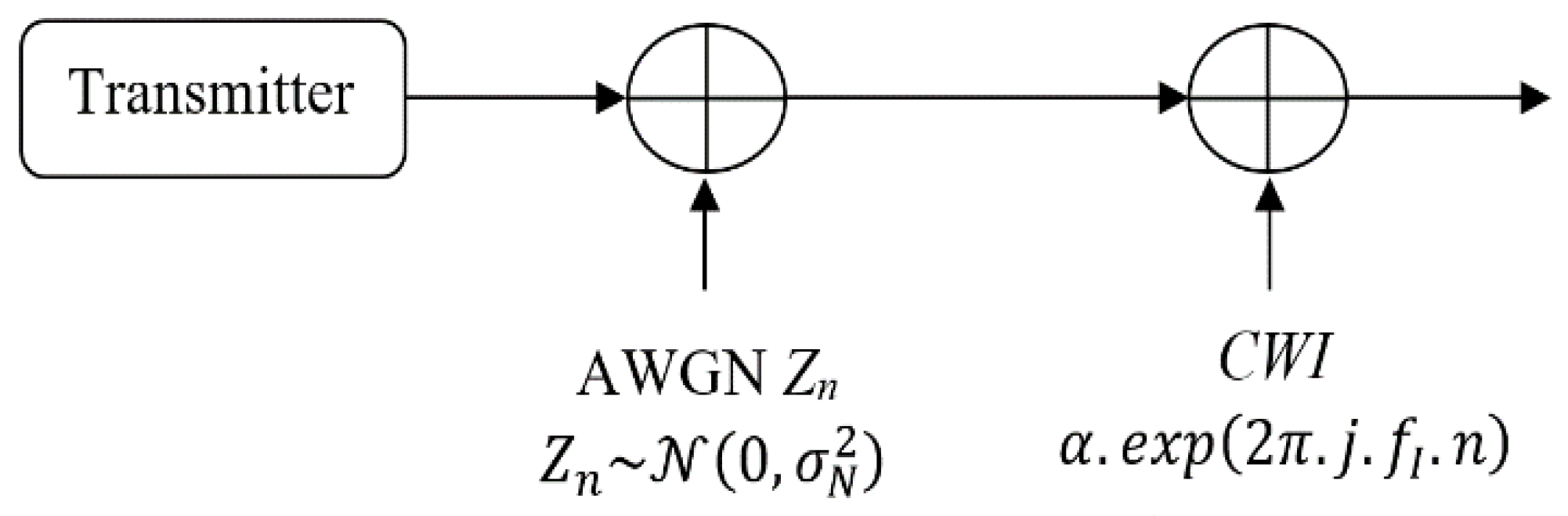
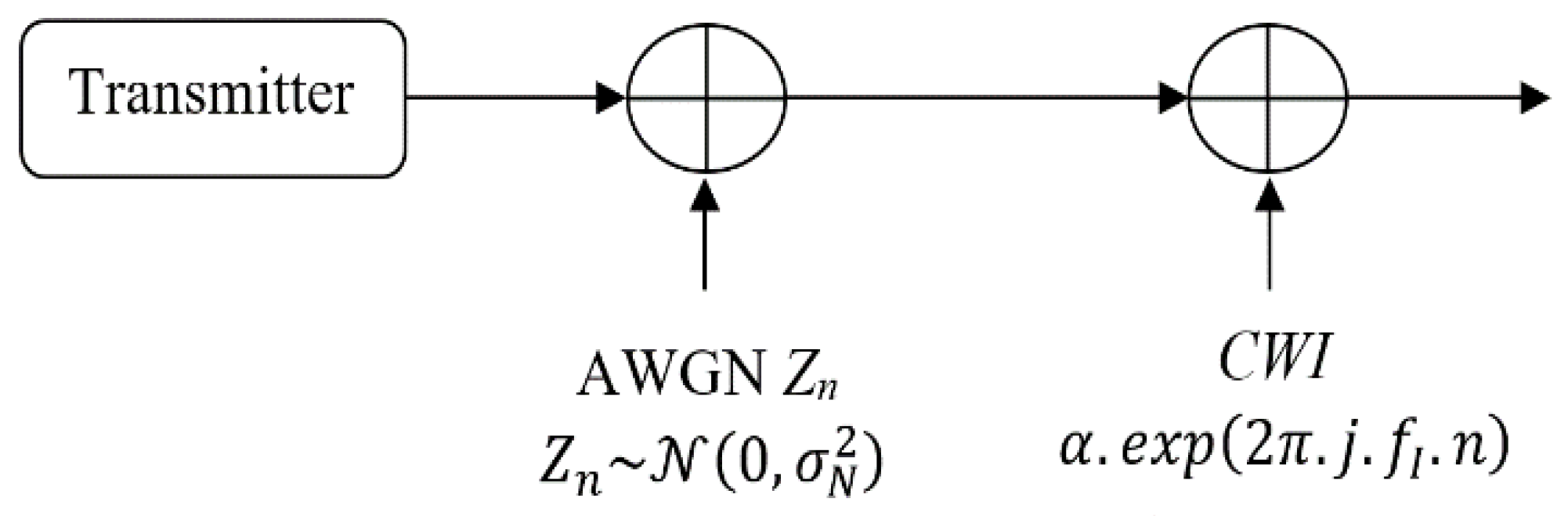
- Considered channel and its effect on the transmitted signal: it should be considered that communication channels almost contain more destructive effects than a simple AWGN channel. The most frequent and famous effects are Doppler (or carrier frequency shift) and variable time delay that exist even for wireless transmitter and receiver with a very short distance. These effects, in the presence of CWI, are more significant and can cause complete packet loss and full crash of the receiver. Caring about just a simple modulator is not sufficient.
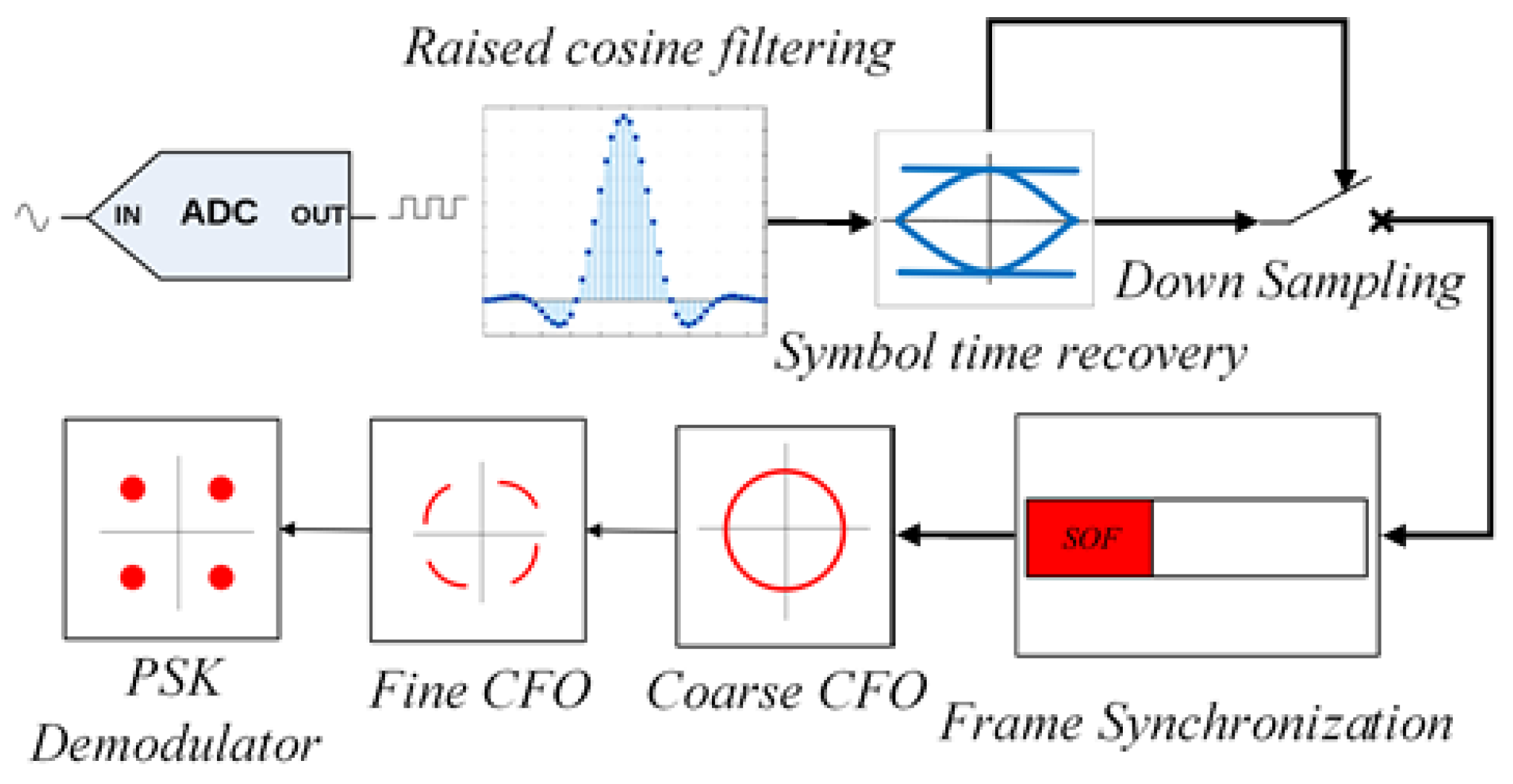
- Typical digital receivers contain more blocks: to handle the real effects of a communication channel, a digital receiver must utilize different signal processing blocks to compensates for each effect individually. These blocks are sensitive to external interference and the amount of damage varies based on the interference parameters.
- Criteria to adjust the filter parameters: Prior to this study, most researches are focused on the effects of a narrow band interference on the received signal’s BER. Preserving QoS and also protecting all signal processing blocks require more consideration than the BER for filter adjustment.
- Considering the described shortcoming, the current study tries to fulfill the following study subjects:
- This study brings the first order notch filter in the chain of a digital receiver as a protector against narrowband interference and explains how it could be utilized beside other blocks.
- It considers more essential channel effects on the transmitted signal. As a drawback, the physical layer of the receiver must contain all required blocks for receiving data in real situations. The behavior of blocks is deeply analyzed in the presence of CWI. Deviation from the optimum work is explained in the term of packet loss or error from the correct detection. Thus, signal constellation vulnerability and system degradation caused by the other blocks are described mathematically and by simulation.
- It introduces more systematic parameters measurements for adjusting the r parameter and simple models are presented to clarify how to measure and define them. For example, the amount of residual interference after filtering is very important to know for digital receivers that have more sensitive blocks.
3. The Effects of Interference
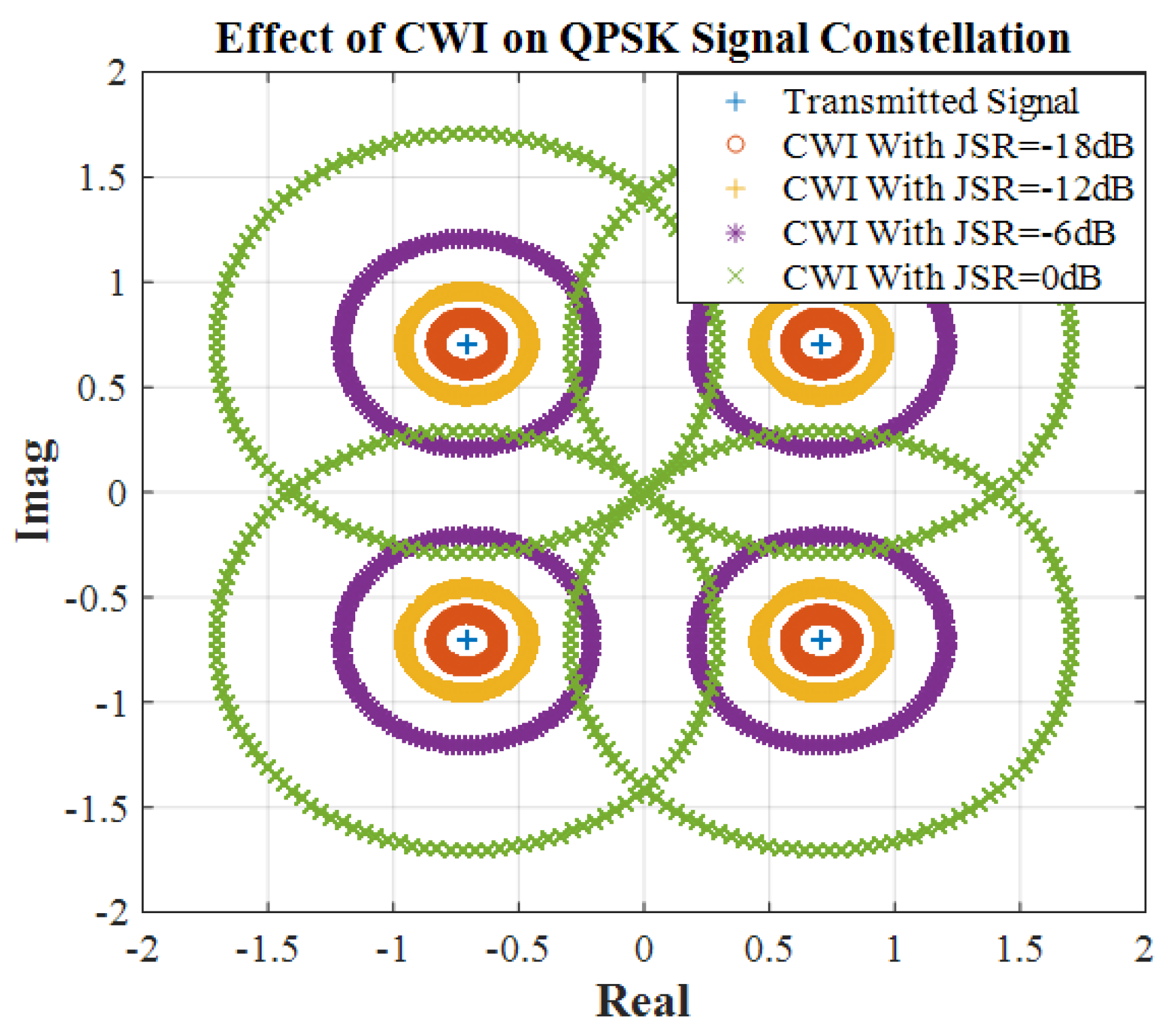
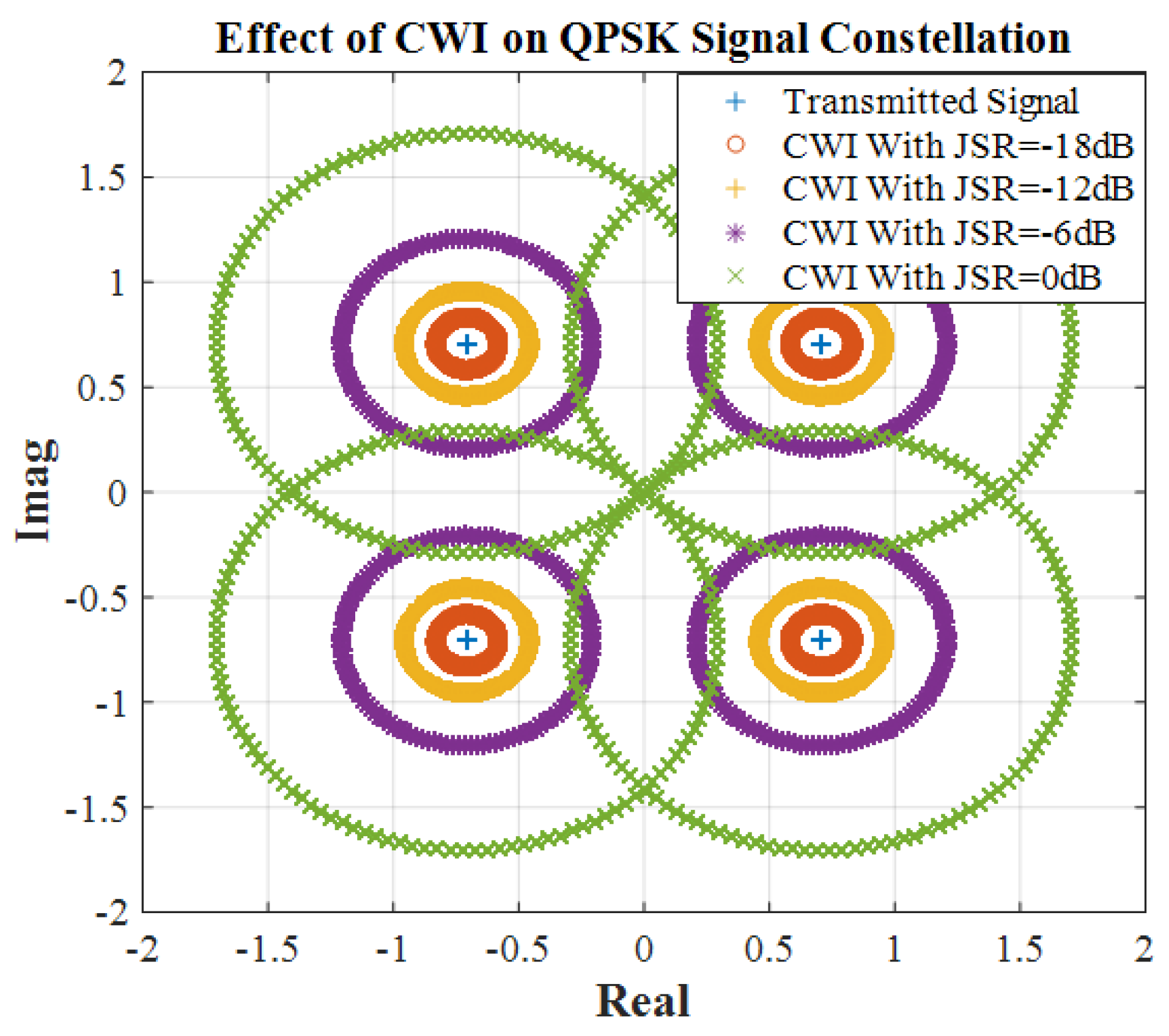
3.1. Signal Constellation
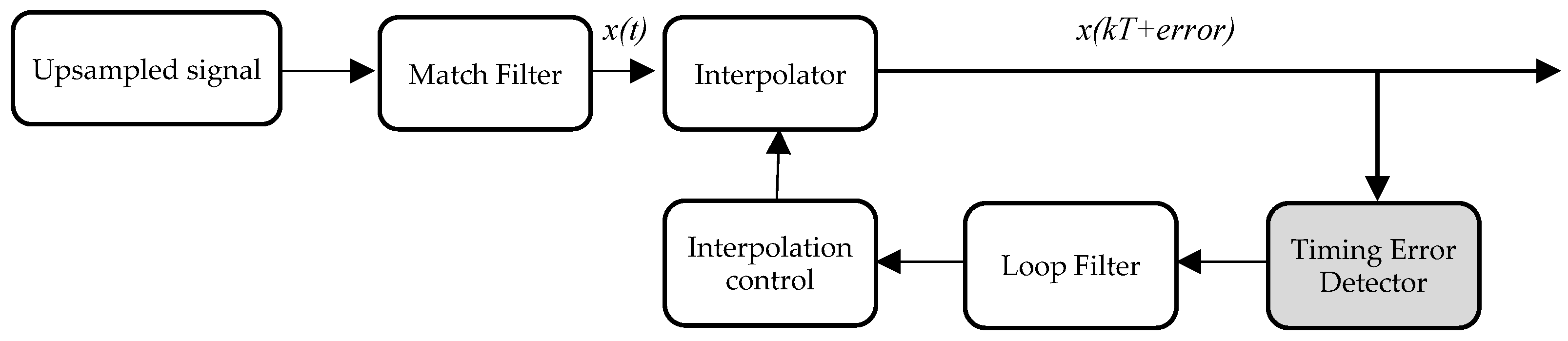
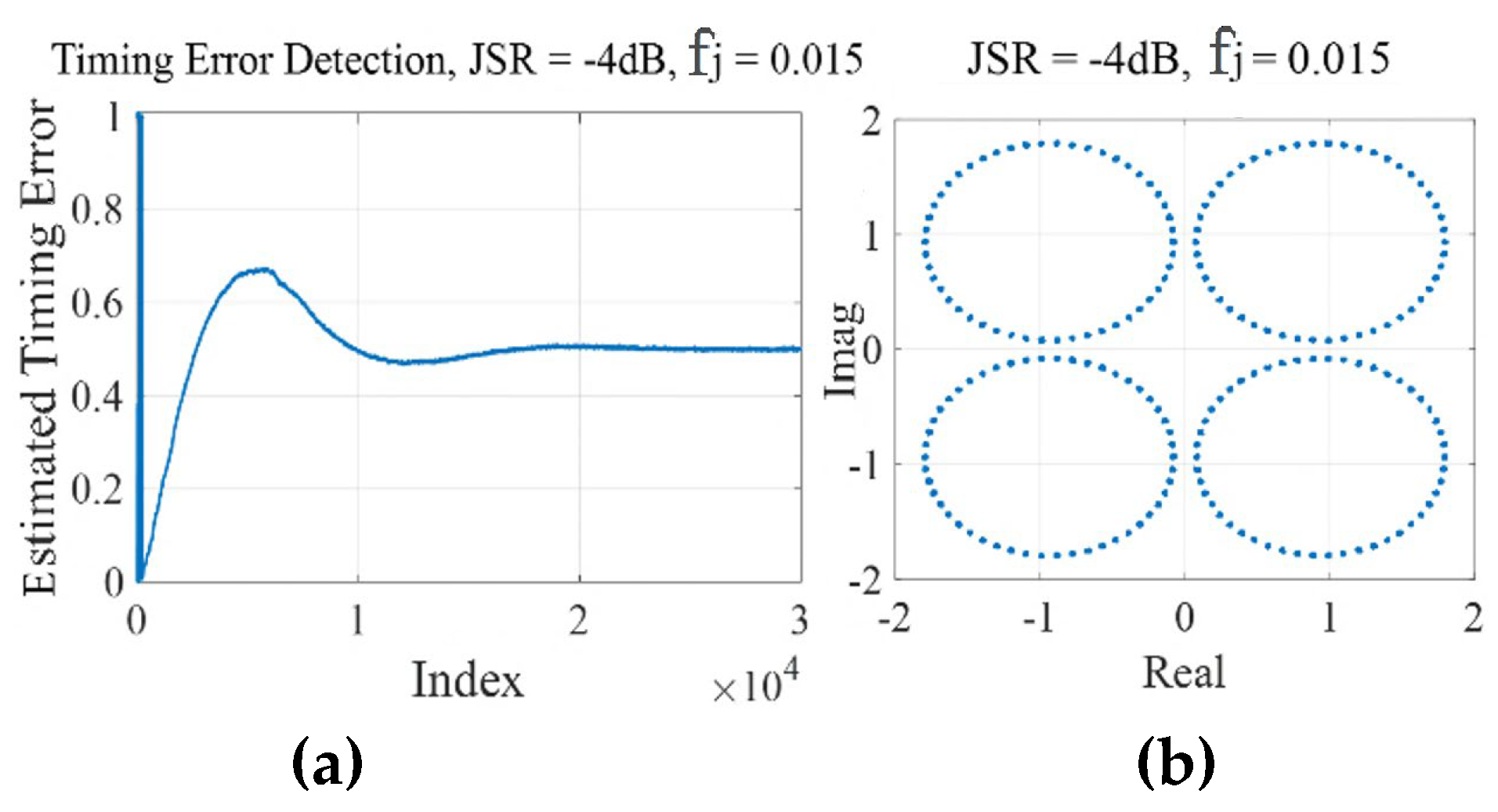
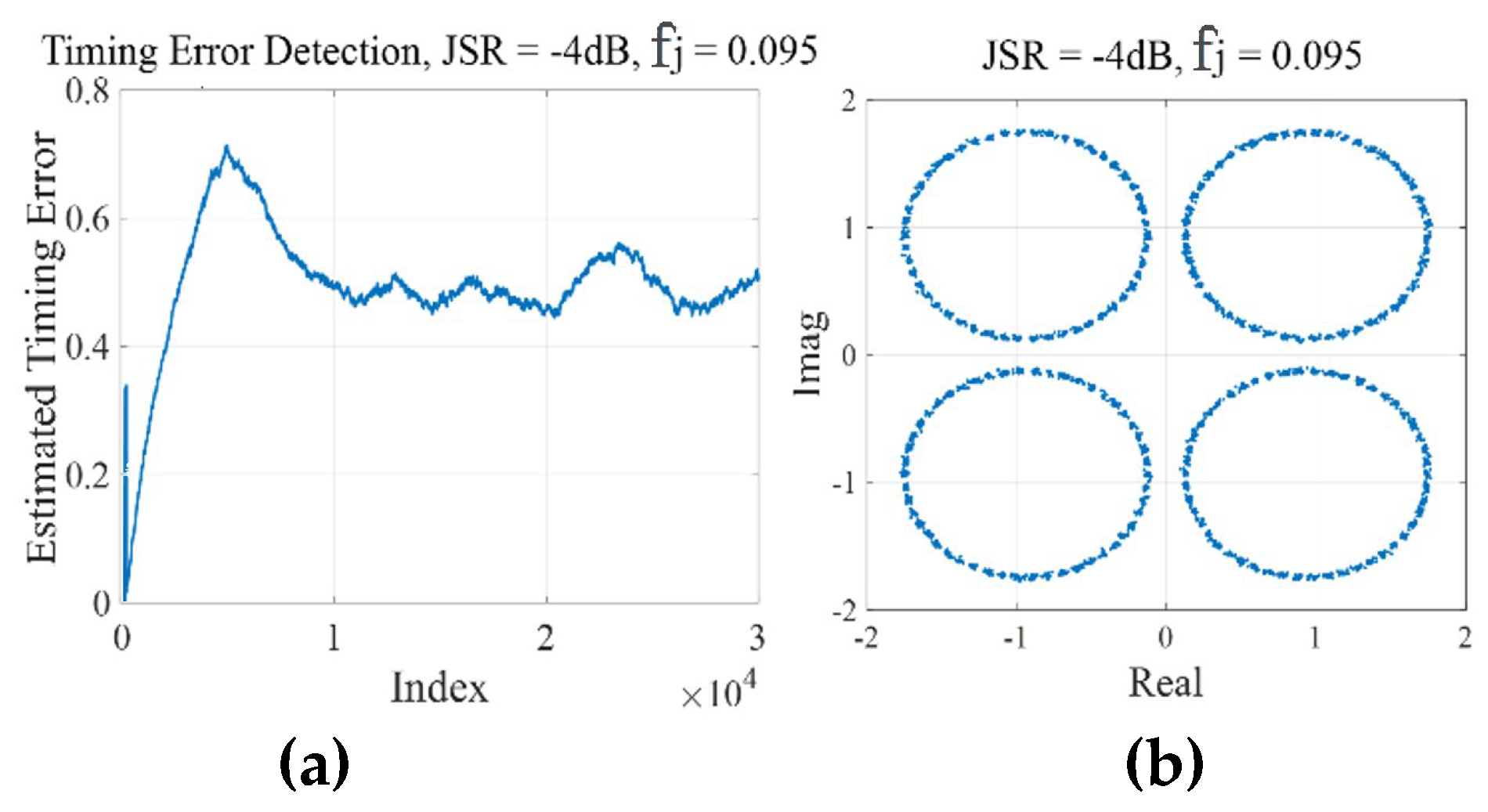
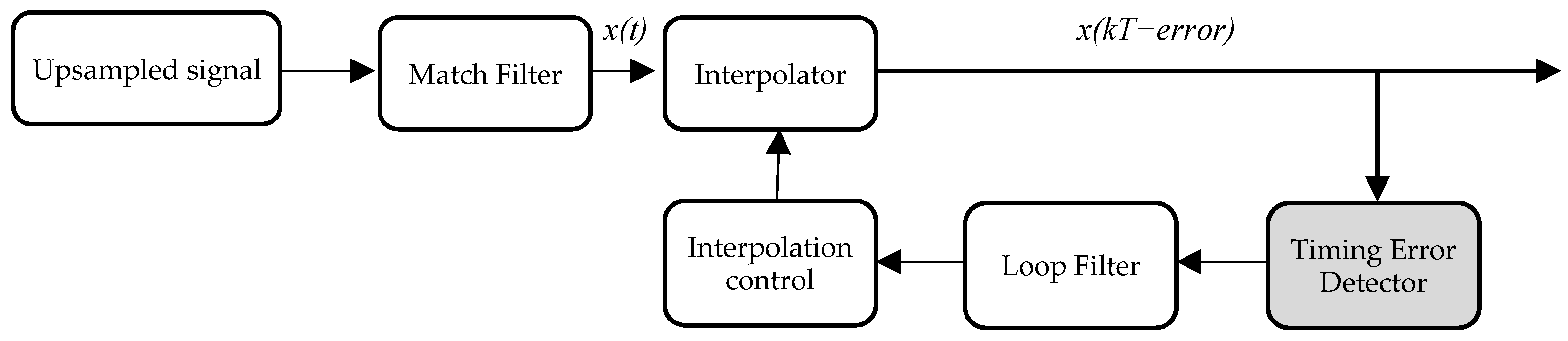
3.2. Symbol Timing Recovery
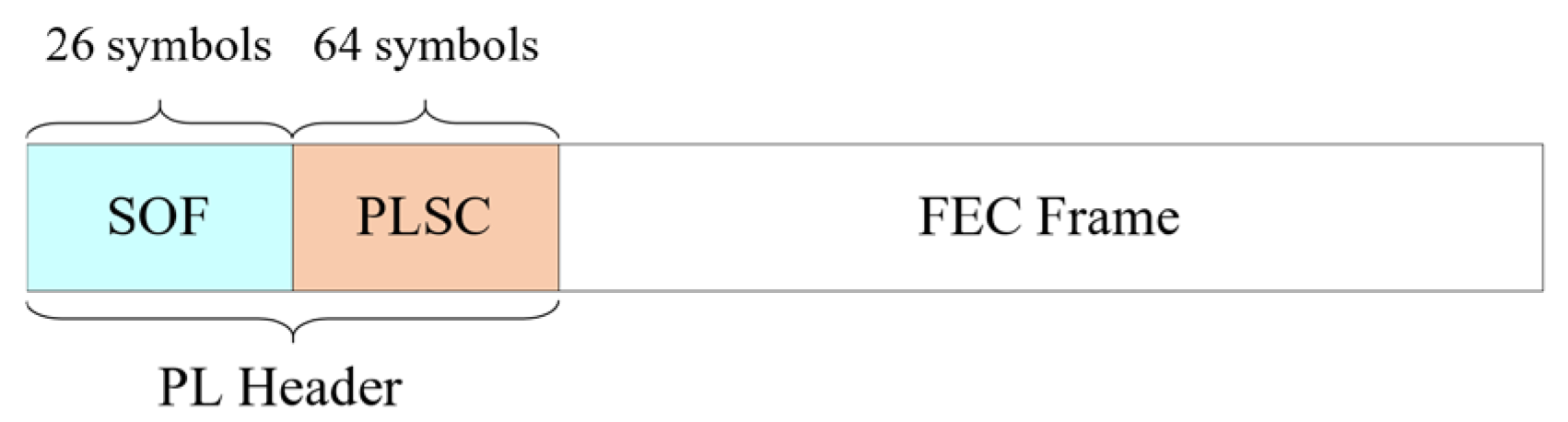
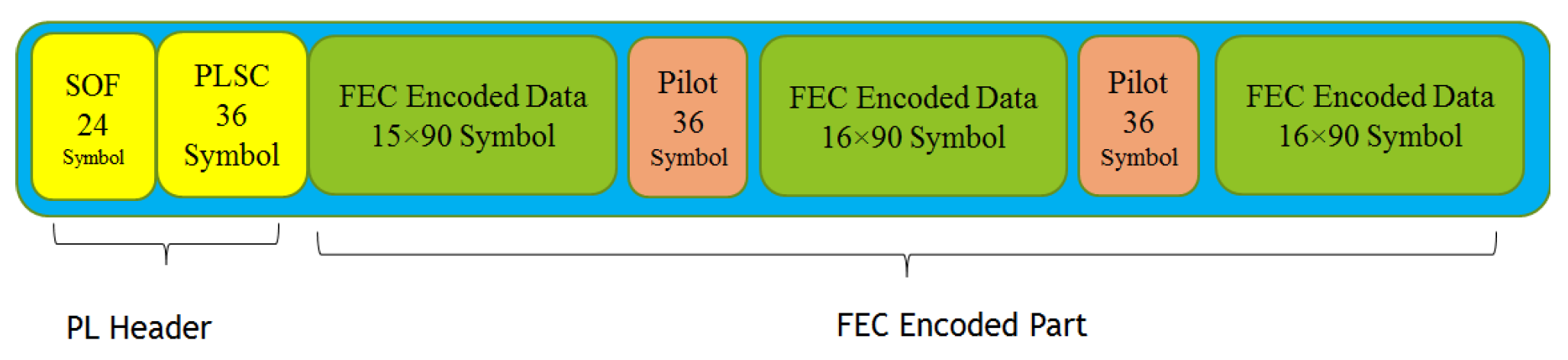
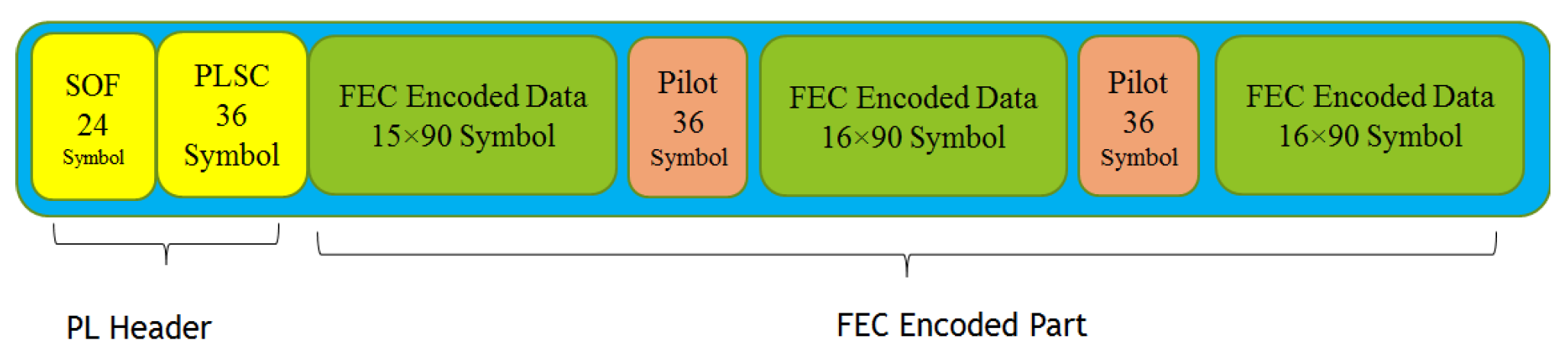
3.3. Frame Synchronization
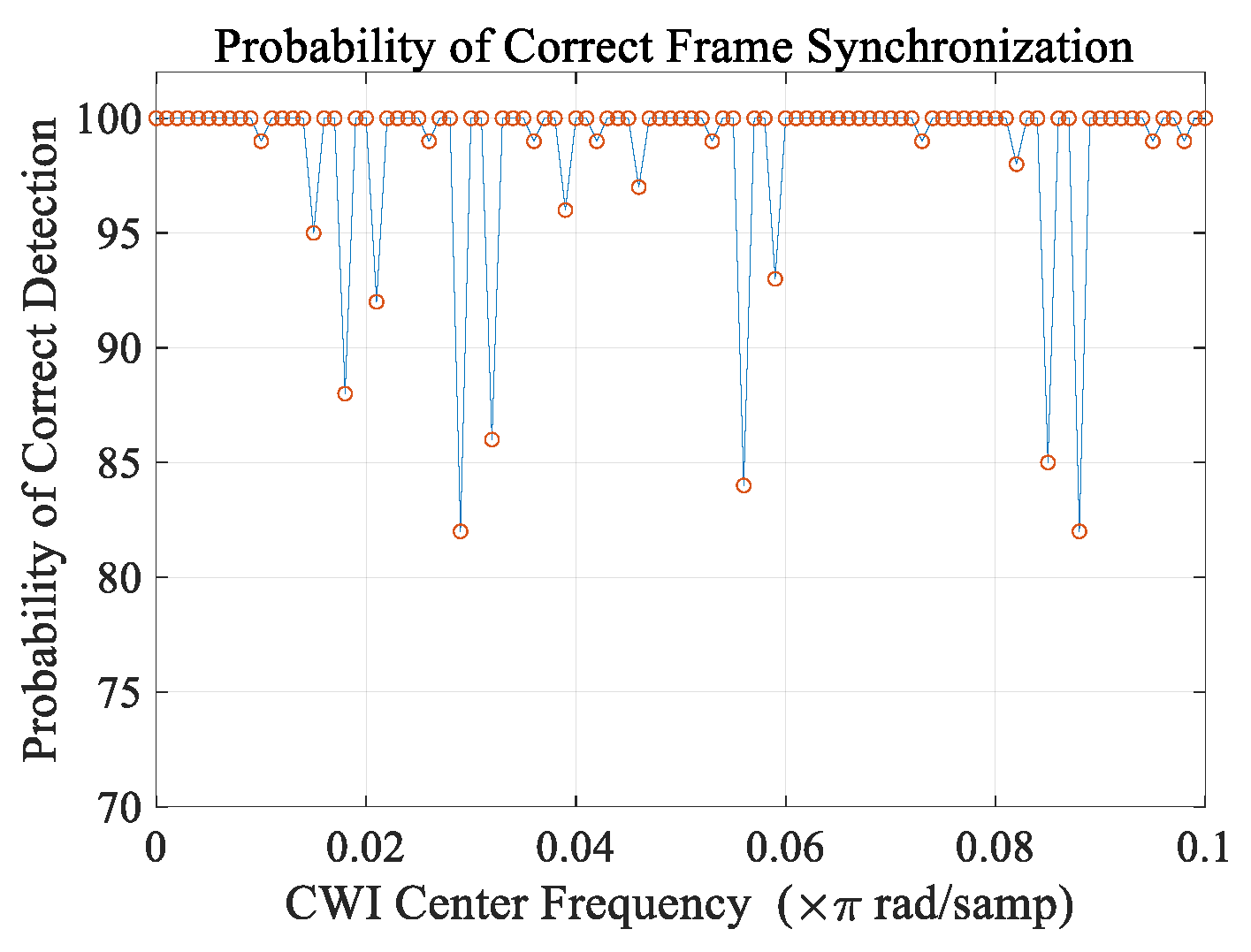
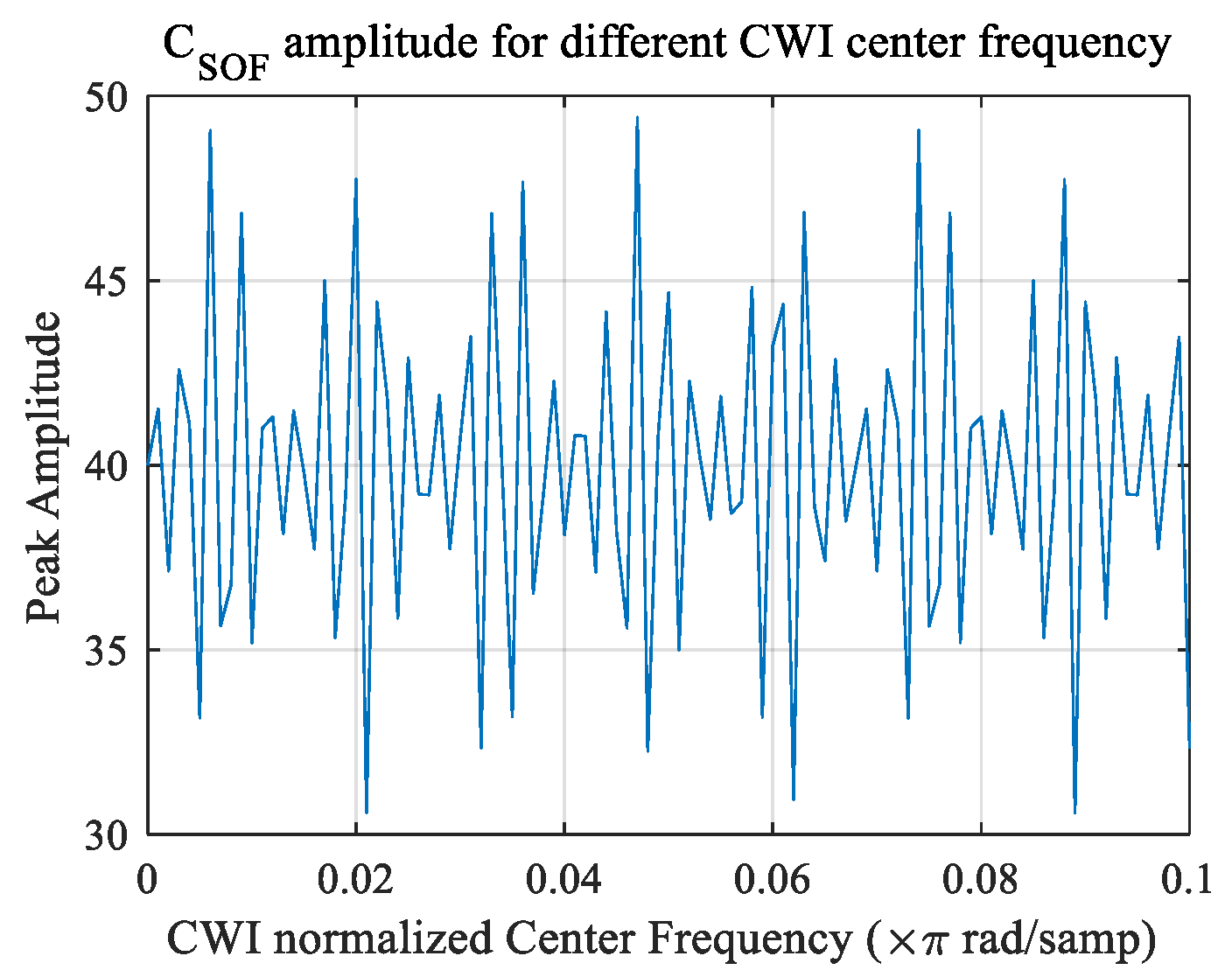
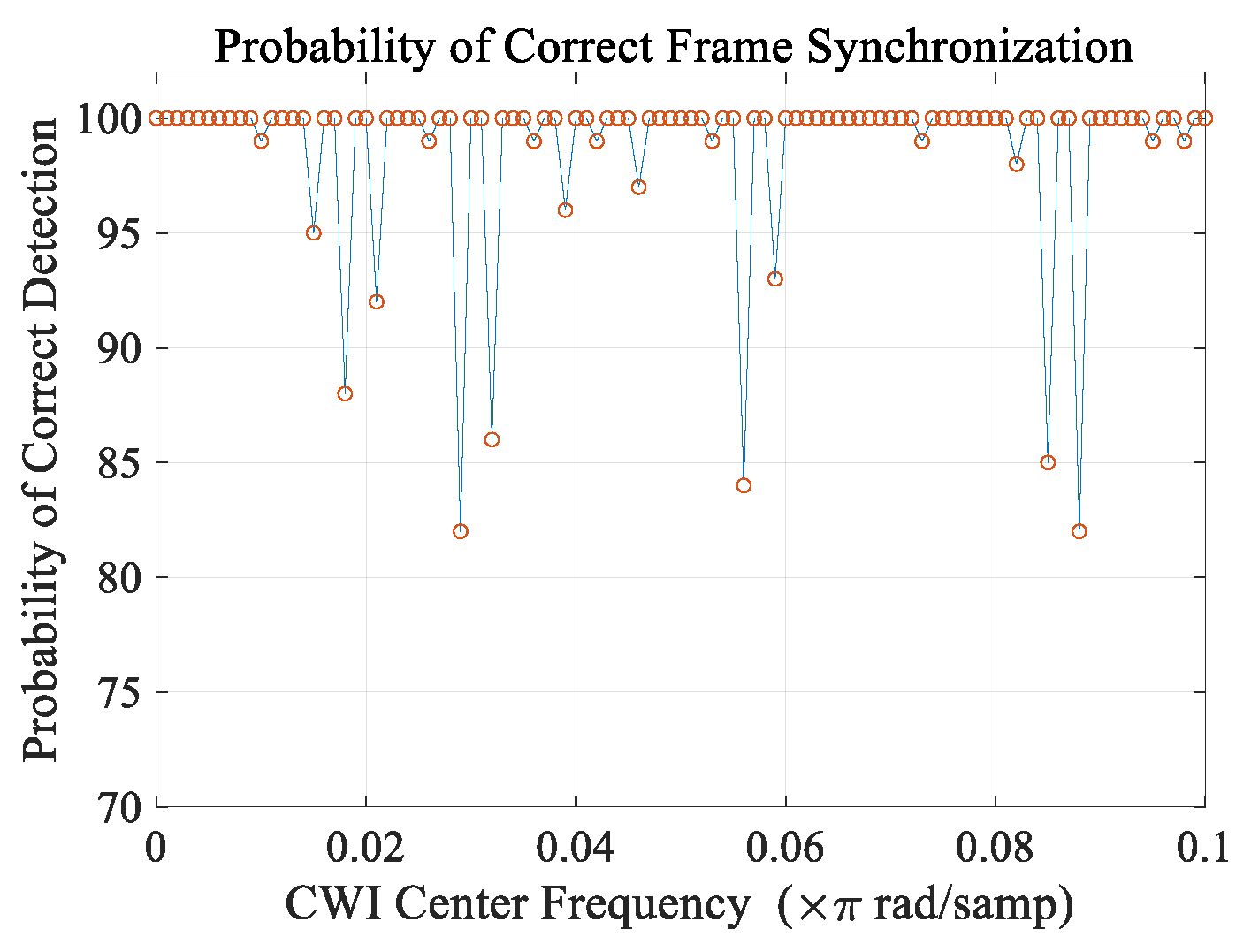
- At some frequency, it damages the shape of the differential coefficients , therefore, peak amplitude, which indicates the start of the frame, decreases severely. Figure 12 represents the peak amplitude based on the CWI center frequency. Peak amplitude fluctuates between highly detectable amplitudes and critically low amplitudes for detection depending on the CWI center frequency as shown in Figure 12. Where the peak amplitude has its local minimums, correct detection probability is decreased as described in Figure 11.
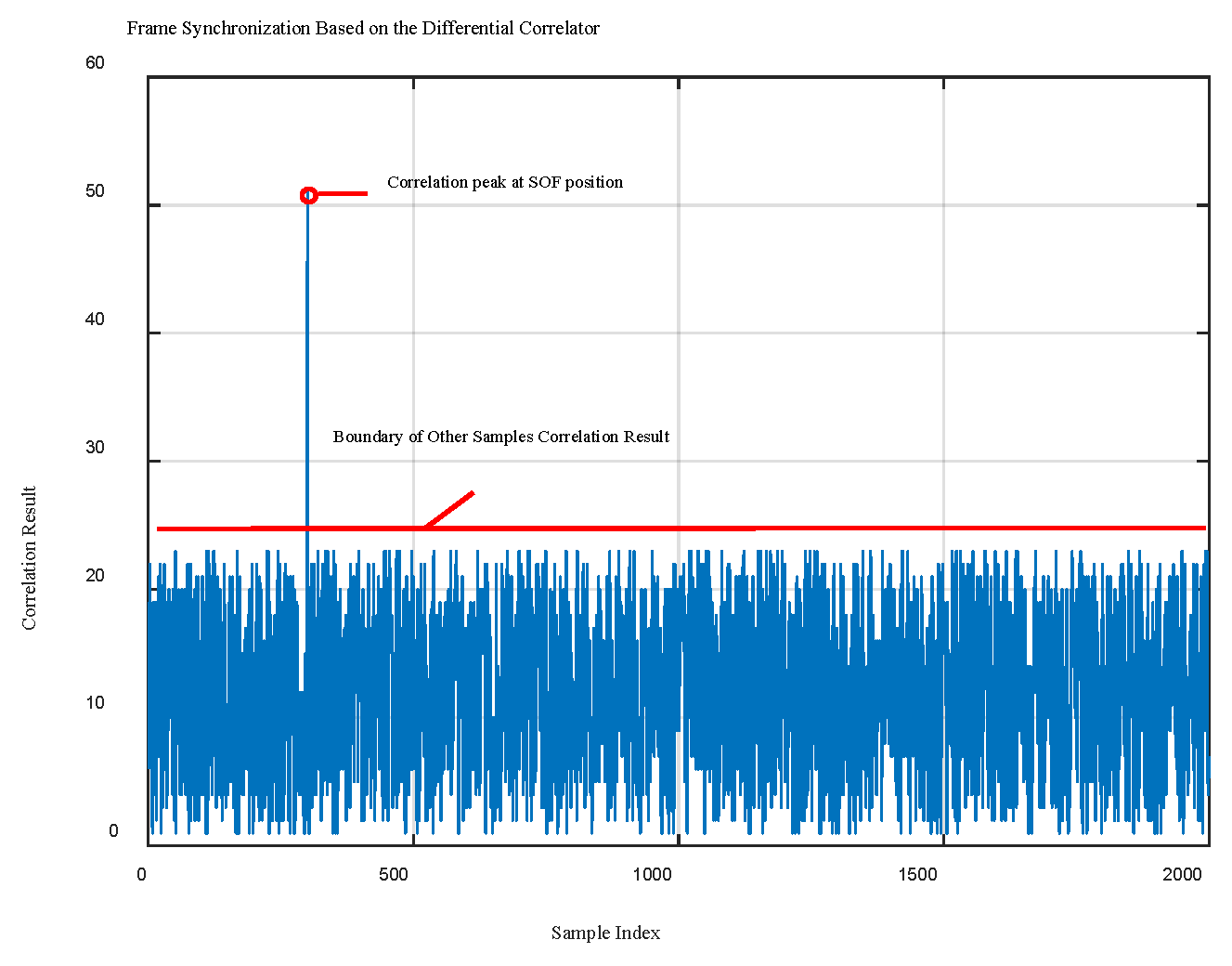
- Another important factor for correct detection is the result of correlation with other samples. The structure of SOF in the DVB-S2 packet is in the way that, correlation with other samples is not large, thus, the start of the frame can be found by the receiver even in noisy conditions. In performed simulations, we observe that in normal situations, the result of correlation for other samples (rather than the header) is under 25 that displayed in Figure 10 as a red line. After repeating the simulation, in the same situation with a CWI with an JSR = −7 dB, it was observed that this amount is increased by 50%.
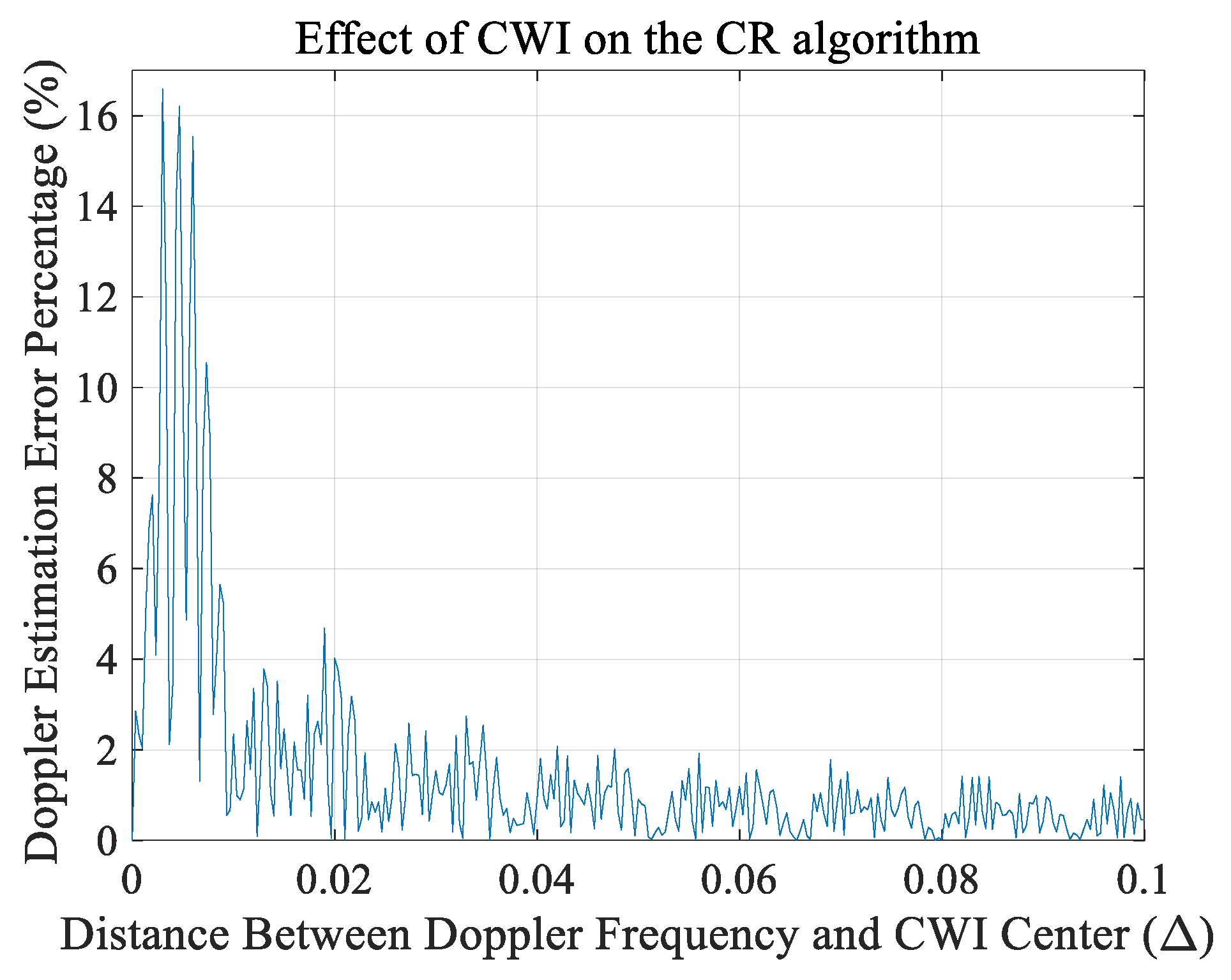
3.4. Carrier Frequency Recovery
3.4.1. Data Aided Carrier Frequency Recovery
3.4.2. Blind Carrier Recovery
4. Proposed Solution and Efficiency Analysis
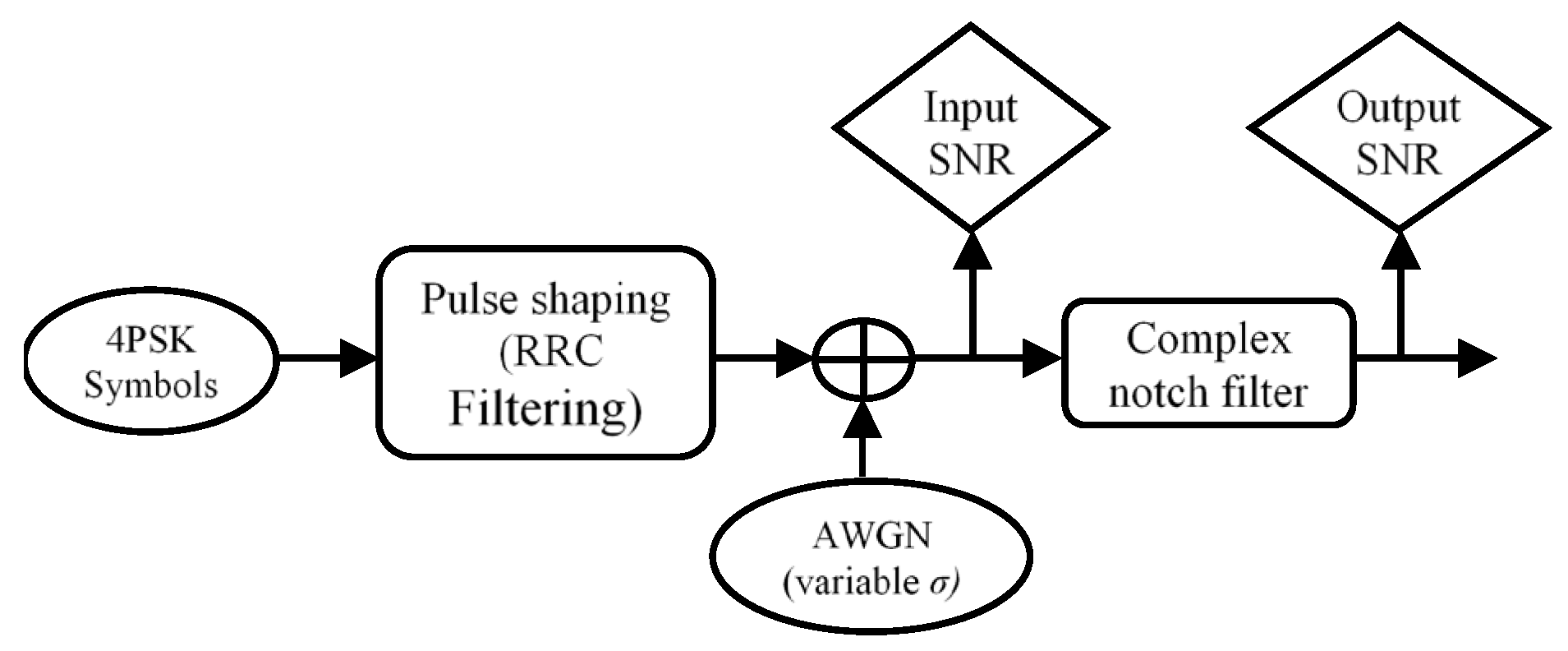
4.1. Notch Filter
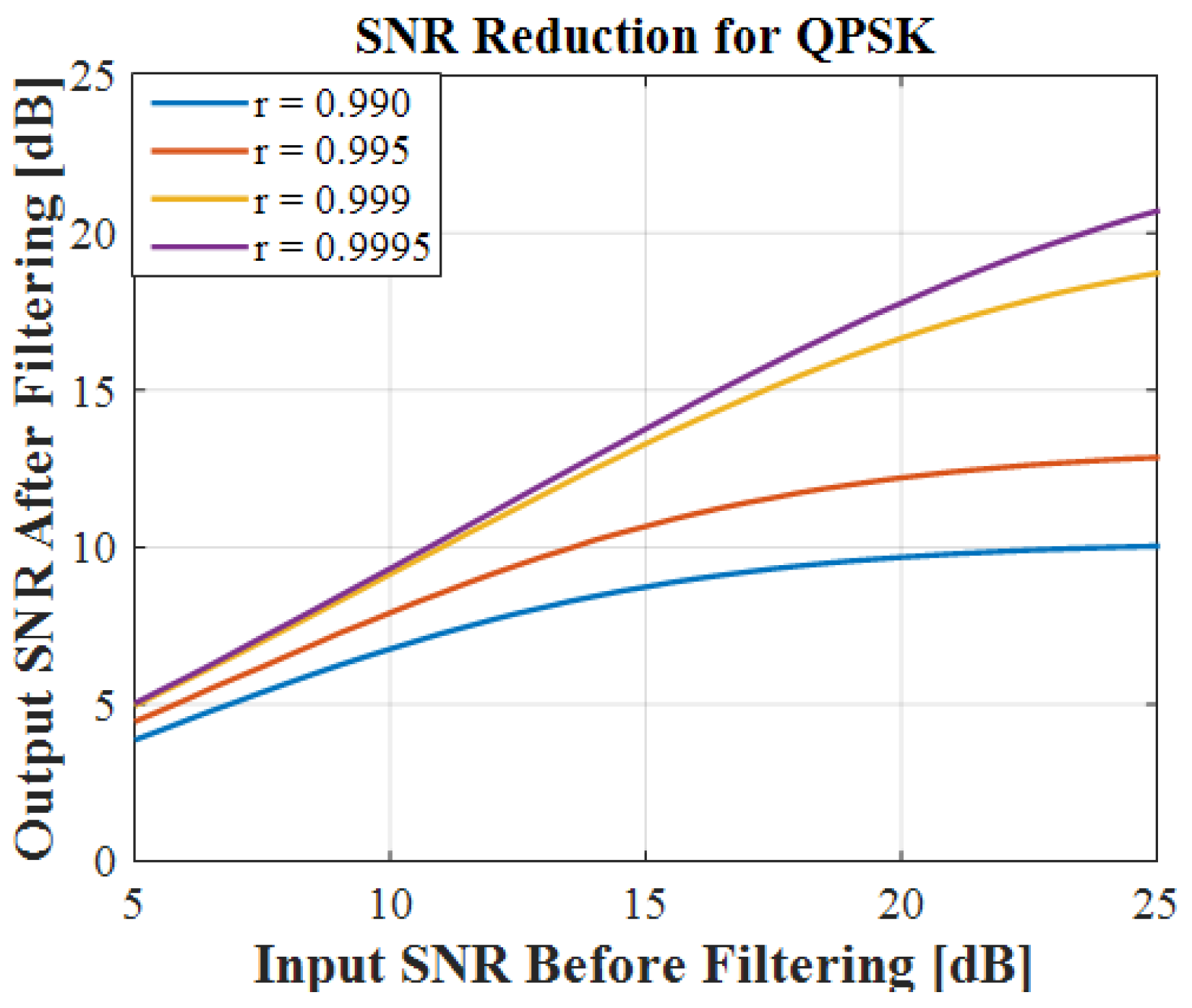
4.2. Effects of Notch Filtering and CWI Removal
4.3. Bit Error Rate (BER)
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xu, D.; Zhang, G.; Ding, X. Analysis of Co-channel Interference in Low-orbit Satellite Internet of Things. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 136–139. [Google Scholar]
- Wu, R.; Wang, W.; Lu, D.; Wang, L.; Jia, Q. Adaptive Interference Mitigation in GNSS; Springer Science and Business Media LLC: Berlin, Germany, 2018. [Google Scholar]
- Idris, A.N.; Suldi, A.M.; Hamid, J.R.A.; Sathyamoorthy, D. Effect of radio frequency interference (RFI) on the Global Positioning System (GPS) signals. In Proceedings of the 2013 IEEE 9th International Colloquium on Signal Processing and its Applications, Kuala Lumpur, Malaysia, 8–10 March 2013; pp. 199–204. [Google Scholar]
- Rashdan, I.; Schmidhammer, M.; Mueller, F.D.P.; Sand, S. Performance Evaluation of Vehicle-to-Vehicle Communication for Cooperative Collision Avoidance at Urban Intersections. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, USA, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Kim, J.; Iyamabo, P. Exact BER calculation of TCM-MAPSK using product trellis algorithm for DVB applications. In Proceedings of the 2017 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Cagliari, Italy, 7–9 June 2017; pp. 1–7. [Google Scholar]
- Andrenacci, S. Physical Layer Performance of Multi-User Detection in Broadband Multi-Beam Systems based on DVB-S2. In Proceedings of the 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014; pp. 1–5. [Google Scholar]
- Debbah, M.; Gallinaro, G.; Müller, R.; Rinaldo, R.; Vernucci, A. Interference mitigation for the reverse-link of interactive satellite networks. In Proceedings of the 9th International Workshop on Signal Processing for Space Communications (SPSC), Berlin, Germany, 10–12 September 2018. [Google Scholar]
- Ye, F.; Tian, H.; Che, F. CW interference effects on the performance of GPS receivers. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 66–72. [Google Scholar]
- Howard, R.M. The Power Spectral Density. In Principles of Random Signal Analysis and Low Noise Design; Wiley: Hoboken, NJ, USA, 2003; pp. 59–91. [Google Scholar]
- Digital Video Broadcasting (DVB). Second generation framing structure channel coding and modulation systems for broadcasting Interactive Services News Gathering and Other Broadband Satellite Applications; ETSI: Sophia Antipolis, France, 2009; pp. 12–67. [Google Scholar]
- Youssef, B.; Khalid, S.; Hajar, C.; Ahmad, B.; Abdelhamid, B.; Driss, M. Measurement and test of a DVB-S2 satellite broadcast. In Proceedings of the 2019 7th Mediterranean Congress of Telecommunications (CMT), Fes, Morocco, 24–25 October 2019; pp. 1–5. [Google Scholar]
- Chi, Y.; Chen, L.; Lv, C. A symbol timing recovery algorithm of M-PSK signals for burst modem applications with small packet size. China Commun. 2016, 13, 138–146. [Google Scholar] [CrossRef]
- Wu, H.; Sha, Z.; Huang, Z.; Zhou, Y. Frame synchronization for DVB-S2 based on scrambling sequence. In Proceedings of the 2014 International Symposium on Wireless Personal Multimedia Communications (WPMC), Sydney, Australia, 7–10 September 2014. [Google Scholar]
- Wang, H.; Yan, C.; Kuang, J.; Wu, N.; Fei, Z.; Zheng, M. Design and Analysis of Data-Aided Coarse Carrier Frequency Recovery in DVB-S2. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–2. [Google Scholar]
- Yehoshuva, C.; Veeryya, J.; Vereendra, P.; Sumit, K.; Kumar, P. Mansoor New approach of tunable notch filter for blocker suppression of multi-mode wireless devices. In Proceedings of the 2017 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 5–7 January 2017; pp. 1–6. [Google Scholar]
- Wang, G.; Shu, Z.; Chen, G.; Tian, X.; Shen, D.; Pham, K.; Nguyen, T.M.; Blasch, E. Performance evaluation of SATCOM link in the presence of radio frequency interference. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–10. [Google Scholar]
- Lv, Q.; Qin, H. A Novel Algorithm for Adaptive Notch Filter to Detect and Mitigate the CWI for GNSS Receivers. In Proceedings of the 2018 IEEE 3rd International Conference on Signal and Image Processing (ICSIP), Shenzhen, China, 13–15 July 2018; pp. 444–451. [Google Scholar]
- Song, N.; De Lamare, R.C.; Haardt, M.; Wolf, M. Adaptive Widely Linear Reduced-Rank Interference Suppression Based on the Multistage Wiener Filter. IEEE Trans. Signal. Process. 2012, 60, 4003–4016. [Google Scholar] [CrossRef]
- Fors, K.M.; Wiklundh, K.C.; Stenumgaard, P. On the Mismatch of Emission Requirements for CW Interference against OFDM Systems. IEEE Trans. Electromagn. Compat. 2017, 60, 1555–1561. [Google Scholar] [CrossRef]
- Raasakka, J.; Orejas, M. Analysis of notch filtering methods for narrowband interference mitigation. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1282–1292. [Google Scholar]
- Zou, D.; Chen, Y.; Li, Z.; Li, F.; Ding, L.; Sun, Y.; Li, J.; Sui, Q.; Yi, X.; Li, Z. Comparison of null-subcarriers reservation and adaptive notch filter for narrowband interference cancellation in intra-data center interconnect with DMT signal transmission. Opt. Express 2019, 27, 5696–5702. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Zou, D.; Ding, L.; Sun, Y.; Li, J.; Sui, Q.; Li, L.; Yi, X.; Li, Z. 100 Gbit/s PAM4 signal transmission and reception for 2-km interconnect with adaptive notch filter for narrowband interference. Opt. Express 2018, 26, 24066–24074. [Google Scholar] [CrossRef] [PubMed]
- Kang, H.; No, J.-S. Narrow-Band Interference Removing Filter for Mobile Communication Systems. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 603–606. [Google Scholar]
- Gardner, F. A BPSK/QPSK Timing-Error Detector for Sampled Receivers. IEEE Trans. Commun. 1986, 34, 423–429. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, X.; Fan, W.; Han, J.; Zeng, X. Robust and reliable frame synchronization method for DVB-S2 system. In Proceedings of the 2010 Wireless Telecommunications Symposium (WTS), Tampa, FL, USA, 21–23 April 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Luise, M.; Reggiannini, R. Carrier frequency recovery in all-digital modems for burst-mode transmissions. IEEE Trans. Commun. 1995, 43, 1169–1178. [Google Scholar] [CrossRef]
- Rice, M.; Dick, C.; Harris, F. Maximum likelihood carrier phase synchronization in FPGA-based software defined radios. Inst. Electr. Electron. Eng. 2002, 2, 889–892. [Google Scholar]
- De Lima, E.R.; Queiroz, A.F.R.; Alves, D.C.; Da Silva, G.S.; Chaves, C.G.; Mertes, J.G.; Marson, T.M. A detailed DVB-S2 receiver implementation: FPGA prototyping and preliminary ASIC resource estimation. In Proceedings of the 2014 IEEE Latin-America Conference on Communications (LATINCOM), Cartagena de Indias, Colombia, 5–7 November 2014. [Google Scholar]
- Deng, X.; Tian, M.; Luo, Y.; Li, J. Optimization and Implementation of Programmable Demodulator for MPSK MPSK MPSK/16 QAM Signals. Int. J. Digit. Content Technol. Its Appl. (JDCTA) 2012, 6, 91–98. [Google Scholar] [CrossRef]
- Hou, Y.; Xiong, H.; Xiang, H.; Ma, B.; Xiong, J. Simulation Analysis of Multipath Fading Channel Characteristics in Satellite Communication System. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1367–1370. [Google Scholar]
- Varshney, N.; Jain, R.C. An adaptive notch filter for narrow band interference removal. In Proceedings of the 2013 National Conference on Communications (NCC), New Delhi, India, 15–17 February 2013; pp. 1–5. [Google Scholar]
- DiPietro, R. An FFT based technique for suppressing narrow-band interference in PN spread spectrum communications systems. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Orlando, FL, USA, 13–17 May 2002. [Google Scholar]
- Zhang, J.; Lohan, E. Effect and mitigation of narrowband interference on Galileo E1 signal acquisition and tracking accuracy. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 36–41. [Google Scholar]
- Borio, D.; Camoriano, L.; Presti, L.L. Two-Pole and Multi-Pole Notch Filters: A Computationally Effective Solution for GNSS Interference Detection and Mitigation. IEEE Syst. J. 2008, 2, 38–47. [Google Scholar] [CrossRef]
- Baotic, P.; Draganic, M.; Bundalo, D.; Kesegic, I.; Tralic, D.; Grgic, S. Simulation model of DVB-S2 system. In Proceedings of the ELMAR-2013, Zadar, Croatia, 25–27 September 2013; pp. 227–231. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Same, M.H.; Gandubert, G.; Ivanov, P.; Landry, R., Jr.; Gleeton, G. Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard. Telecom 2020, 1, 242-265. https://doi.org/10.3390/telecom1030017
Same MH, Gandubert G, Ivanov P, Landry R Jr., Gleeton G. Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard. Telecom. 2020; 1(3):242-265. https://doi.org/10.3390/telecom1030017
Chicago/Turabian StyleSame, Mohammad Hossein, Gabriel Gandubert, Preslav Ivanov, René Landry, Jr., and Gabriel Gleeton. 2020. "Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard" Telecom 1, no. 3: 242-265. https://doi.org/10.3390/telecom1030017
APA StyleSame, M. H., Gandubert, G., Ivanov, P., Landry, R., Jr., & Gleeton, G. (2020). Effects of Interference and Mitigation Using Notch Filter for the DVB-S2 Standard. Telecom, 1(3), 242-265. https://doi.org/10.3390/telecom1030017