
Numerical Analysis of Composite Stiffened NiTiNOL-Steel Wire Ropes and Panels Undergoing Nonlinear Vibrations

 , , ,
, , ,
Abstract
1. Introduction
2. Dynamic Equations
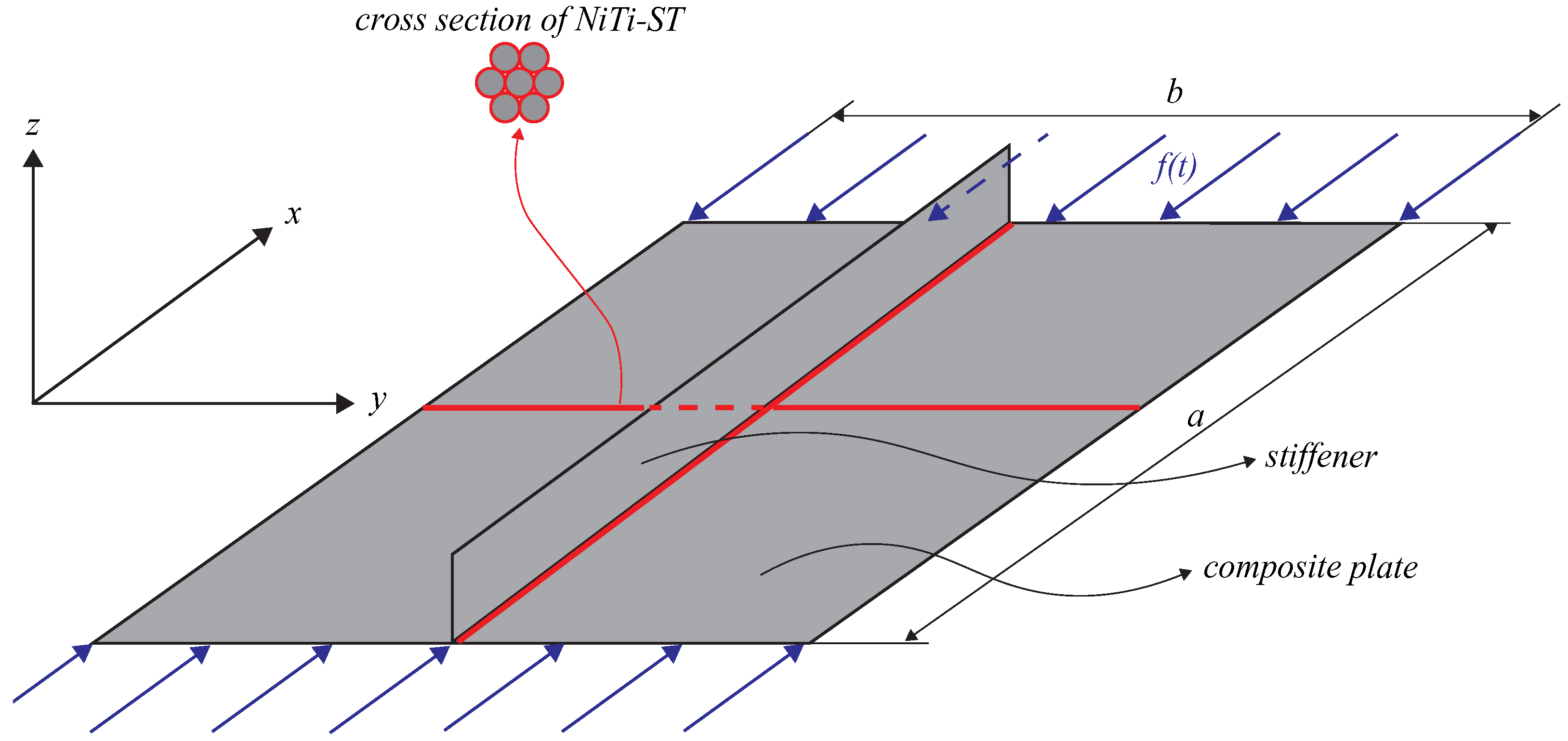
2.1. Mechanical Model
- During deformation, the transverse normal to the composite plate’s mid-surface remains straight, and no strain occurs along the mid-surface.
- The transverse normal remains unextended both prior to and following deformation, maintaining .
- Following deformation, the transverse normal undergoes rotation to maintain its perpendicular orientation to the composite plate’s mid-surface.
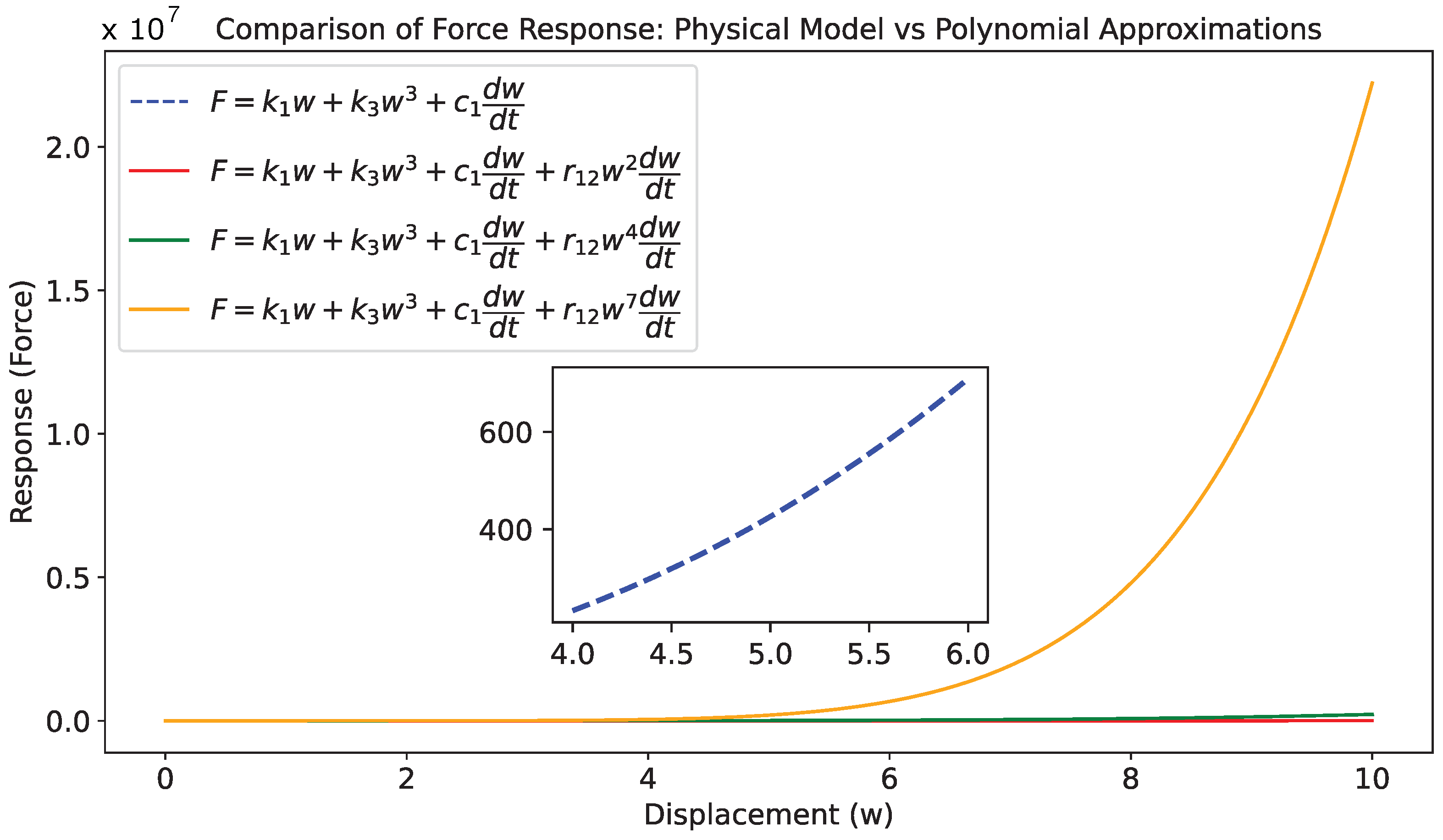
2.2. Constitutive Formulation
3. Mathematical Analysis
3.1. Define the Dynamic Formulation
3.2. Deriving the Dynamic Response
4. Examples
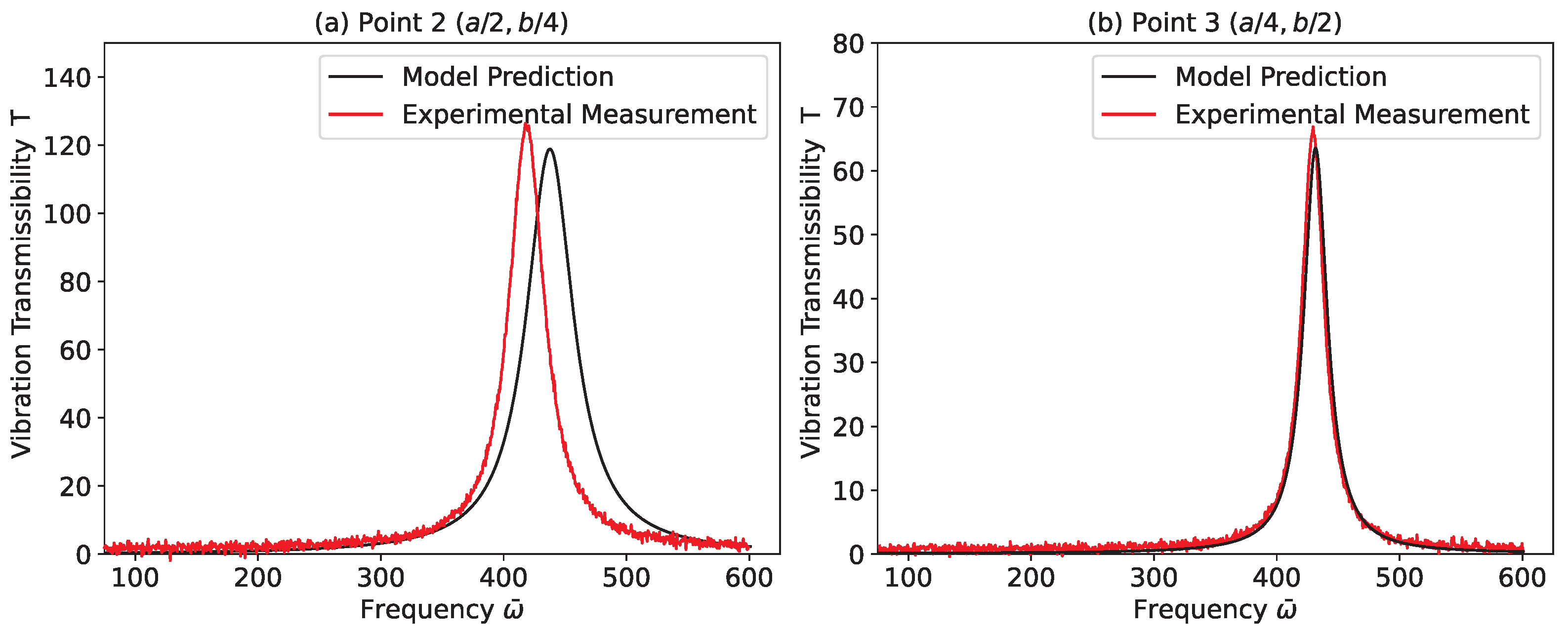
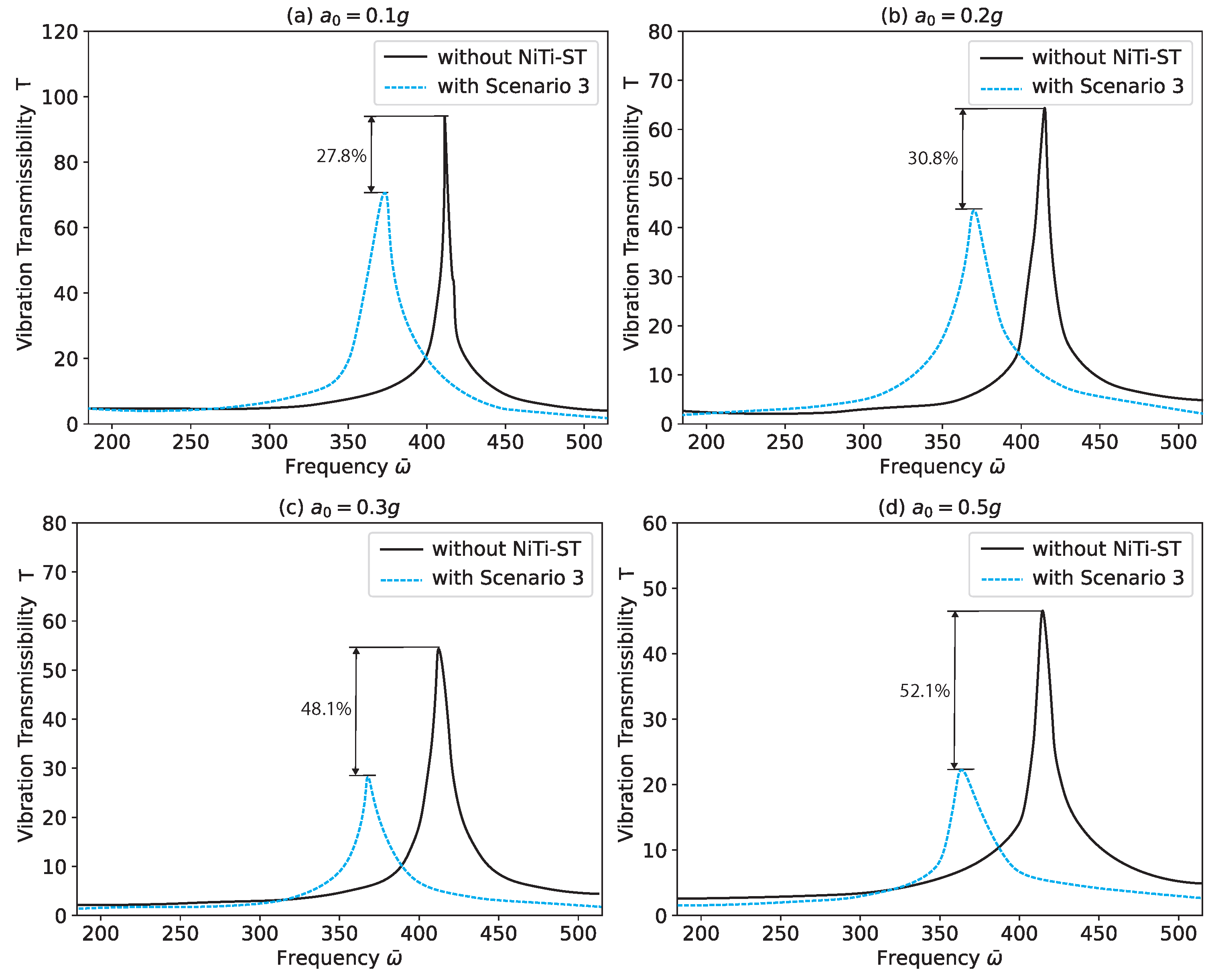
4.1. Vibration Effect Due to NiTi–ST Configurations
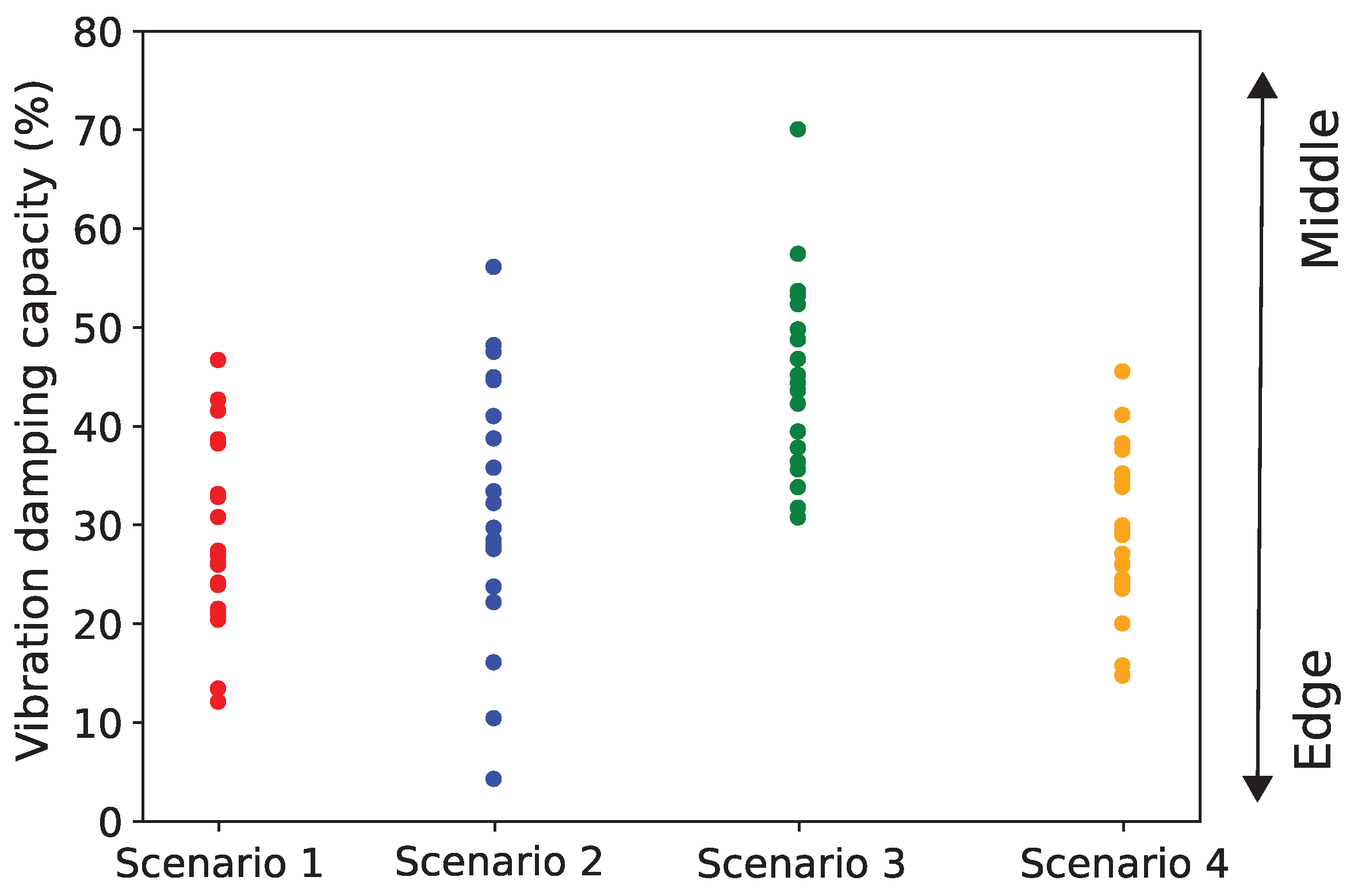
4.2. Effect of Wire Ropes on Vibration Damping
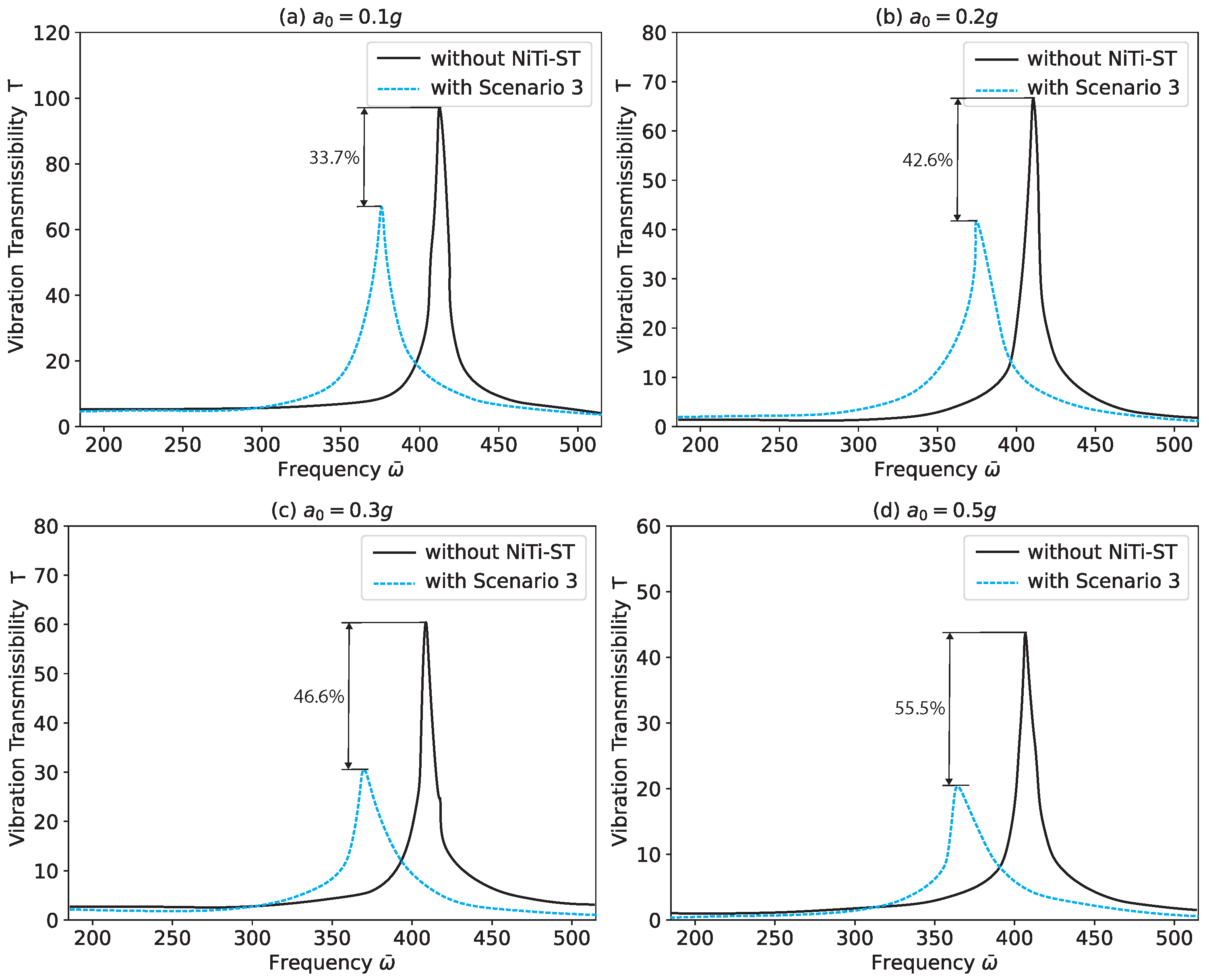
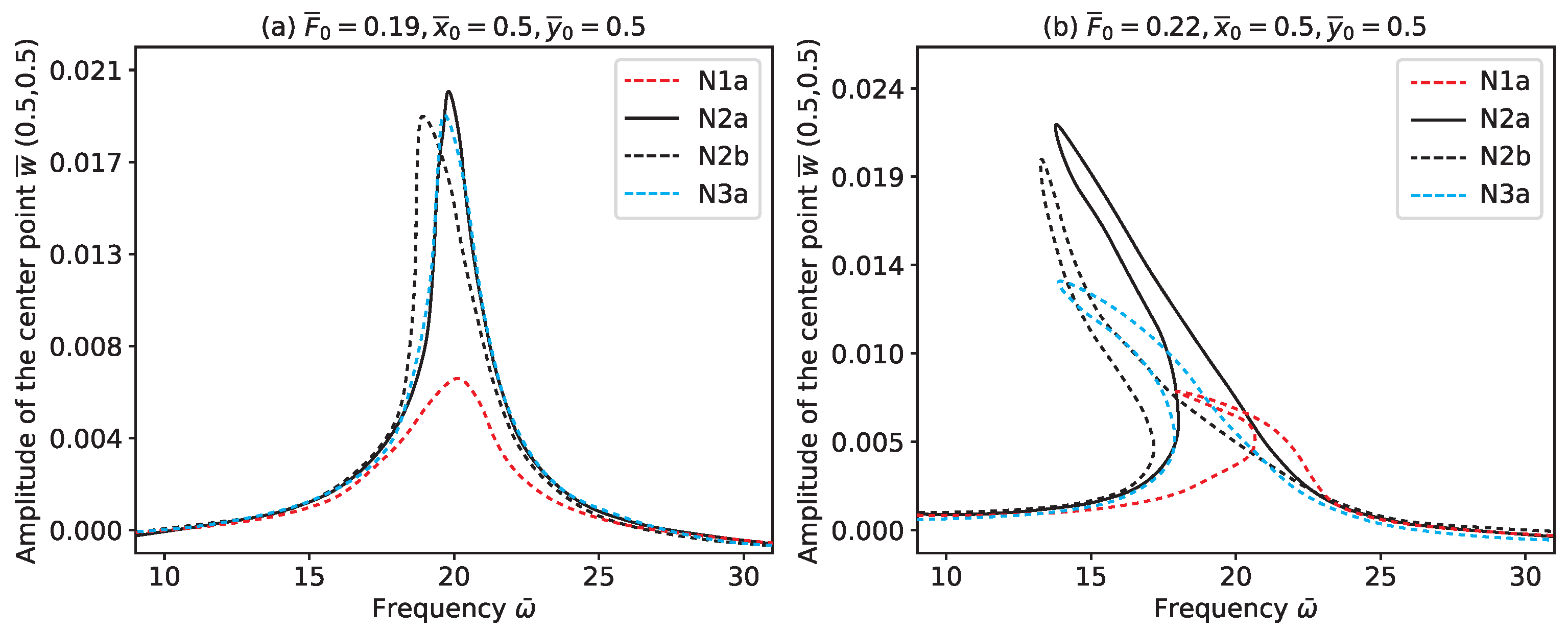
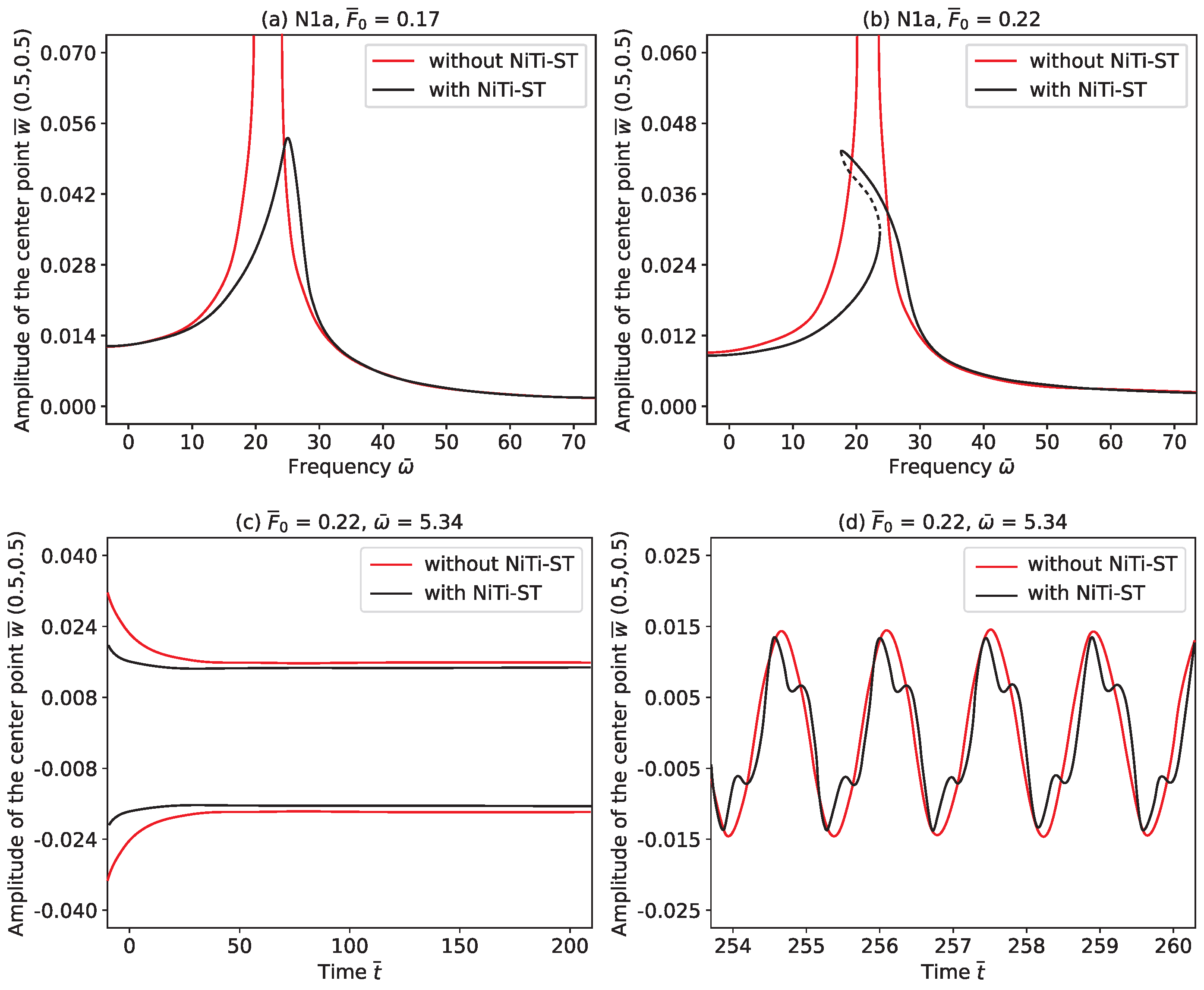
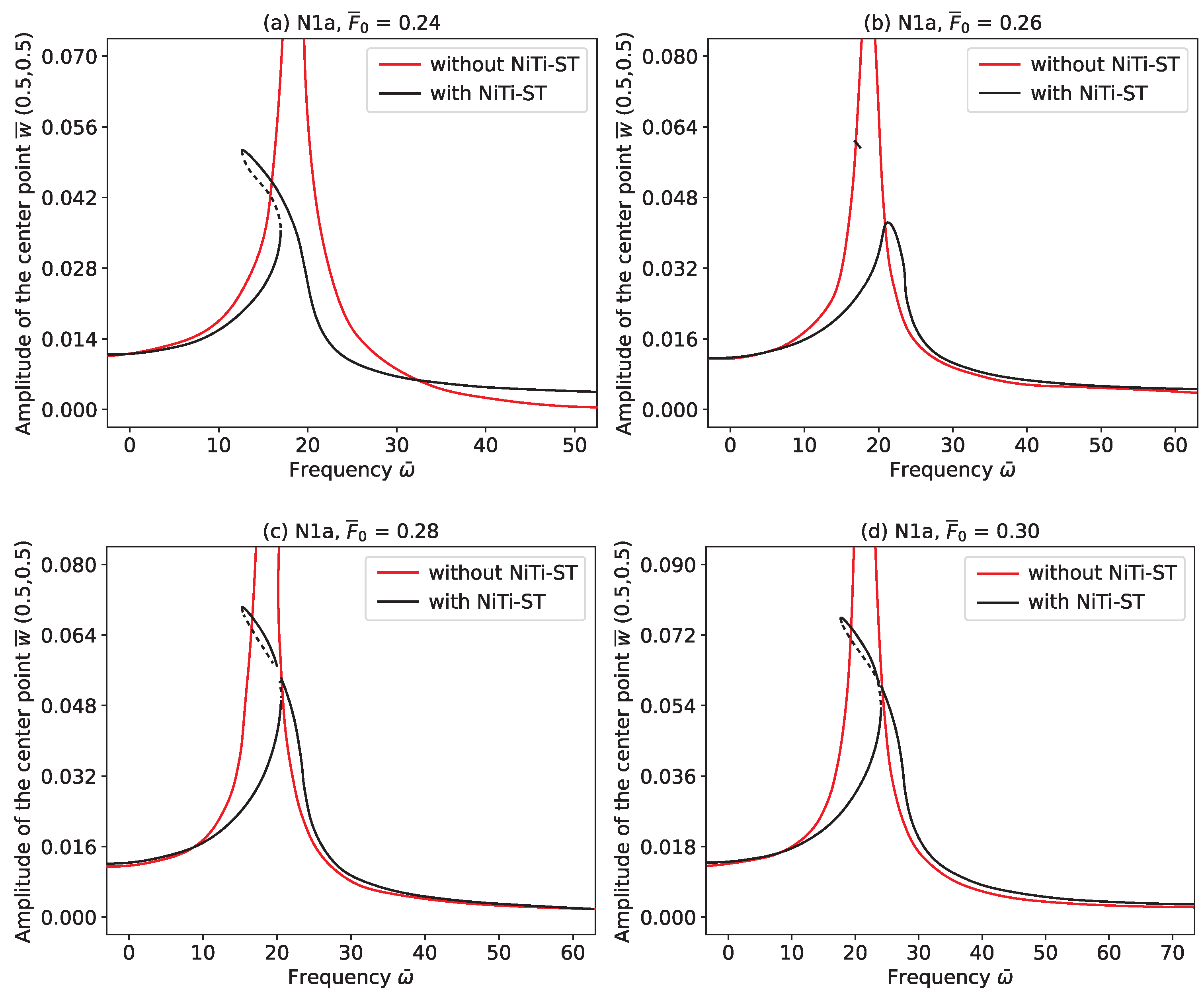
4.3. Effect of Large Excitation on Vibration Response
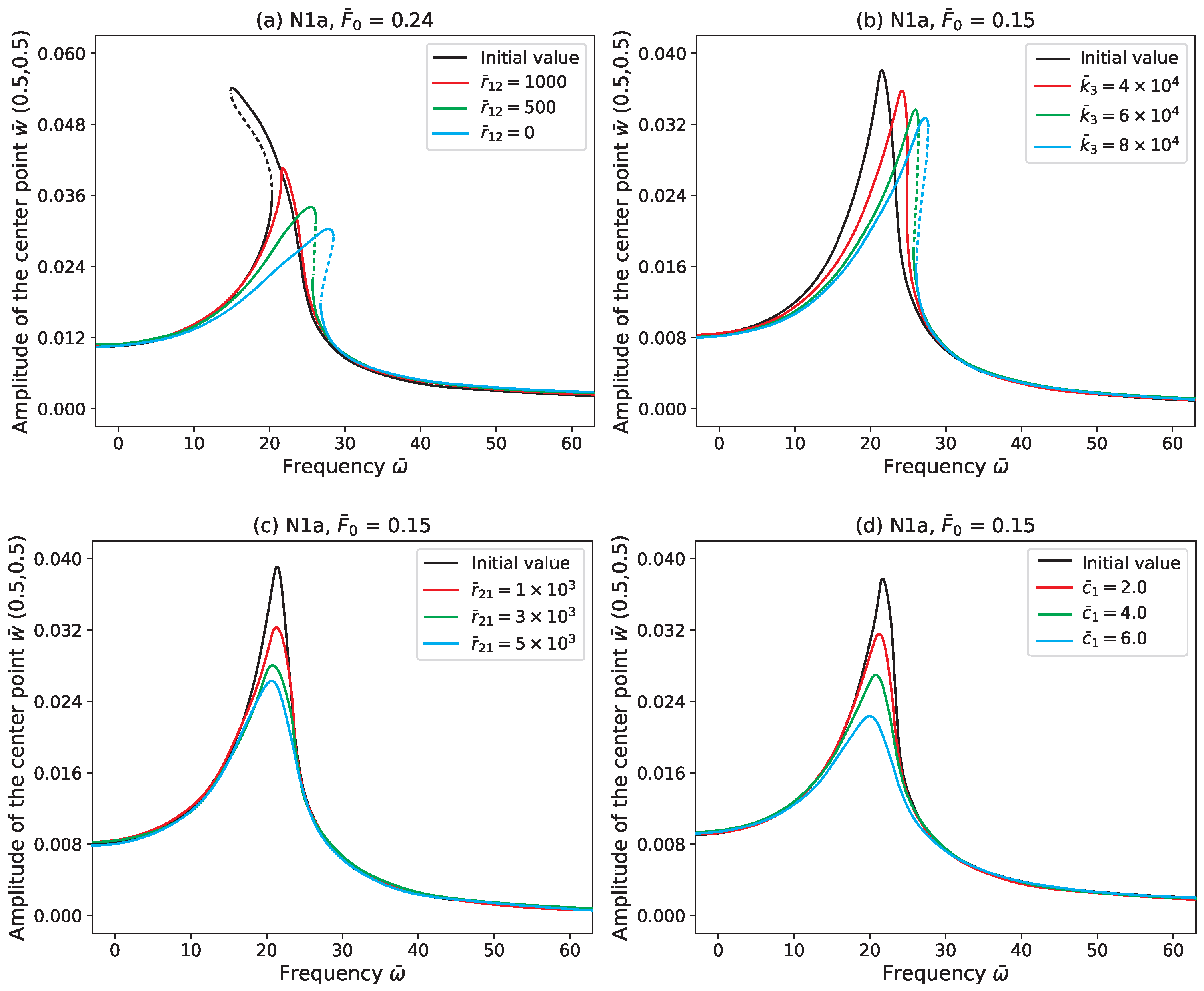
4.4. Effect of Structural Parameter on Vibration Control
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.W.; Zhang, H.; Hou, S.; Xu, K.F.; Chen, L.Q. Vibration suppression of composite laminated plate with nonlinear energy sink. Acta Astronaut. 2016, 123, 109–115. [Google Scholar] [CrossRef]
- Rajak, D.K.; Pagar, D.D.; Kumar, R.; Pruncu, C.I. Recent progress of reinforcement materials: A comprehensive overview of composite materials. J. Mater. Res. Technol. 2019, 8, 6354–6374. [Google Scholar] [CrossRef]
- Prabowo, A.R.; Sohn, J.M.; Putranto, T. Crashworthiness performance of stiffened bottom tank structure subjected to impact loading conditions: Ship-rock interaction. Curved Layer. Struct. 2019, 6, 245–258. [Google Scholar] [CrossRef]
- Wang, S.; Rolland, Y.; Soares, C.G. Analytical and numerical analysis of slamming induced vibrations on composite plates. Ocean Eng. 2022, 258, 111643. [Google Scholar] [CrossRef]
- Peças, P.; Carvalho, H.; Salman, H.; Leite, M. Natural fibre composites and their applications: A review. J. Compos. Sci. 2018, 2, 66. [Google Scholar] [CrossRef]
- Putranto, T.; Kõrgesaar, M.; Tabri, K. Application of Equivalent Single Layer Approach for Ultimate Strength Analyses of Ship Hull Girder. J. Mar. Sci. Eng. 2022, 10, 1530. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, W.; Li, B.; Zhu, J.; Wang, C.; Song, G.; Wu, G.; Yang, X.; Huang, Y.; Ma, L. Recent advances of interphases in carbon fiber-reinforced polymer composites: A review. Compos. Part B Eng. 2022, 233, 109639. [Google Scholar] [CrossRef]
- Putranto, T. Equivalent single layer approach for ultimate strength analysis of box girder under bending load. Ocean Eng. 2024, 292, 116535. [Google Scholar] [CrossRef]
- Diatmaja, H.; Prabowo, A.R.; Muhayat, N.; Tuswan, T.; Putranto, T. Fast ship prototype design simulation with fin stabilizer on hydrodynamic characteristics for ship realization planning. IOP Conf. Ser. Earth Environ. Sci. 2023, 1166, 012048. [Google Scholar] [CrossRef]
- Ibrahim, R.A. Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 2008, 314, 371–452. [Google Scholar] [CrossRef]
- Wu, M.Q.; Zhang, W.; Chronopoulos, D. Nonlinear vibrations and dynamic snap-through behaviors of four-corner simply supported bistable asymmetric laminated composite square shell. Mech. Syst. Signal Process. 2022, 173, 109023. [Google Scholar] [CrossRef]
- Ghadge, R.; Ghorpade, R.; Joshi, S. Multi-disciplinary design optimization of composite structures: A review. Compos. Struct. 2022, 280, 114875. [Google Scholar] [CrossRef]
- Jung, D.; Yu, W.-R.; Ahn, H.; Na, W. New b-value parameter for quantitatively monitoring the structural health of carbon fiber-reinforced composites. Mech. Syst. Signal Process. 2022, 165, 108328. [Google Scholar] [CrossRef]
- Chandra, S.; Maeder, M.; Bienert, J.; Beinersdorf, H.; Jiang, W.; Matsagar, V.A.; Marburg, S. Identification of temperature-dependent elastic and damping parameters of carbon–epoxy composite plates based on experimental modal data. Mech. Syst. Signal Process. 2023, 187, 109945. [Google Scholar] [CrossRef]
- Wu, M.; Jia, L.; Chen, Z.; Wang, J.; Yan, R. Synergetic enhancement of interfacial properties and impact resistant of UHMWPE fiber reinforced composites by oxygen plasma modification. Compos. Struct. 2022, 292, 115663. [Google Scholar] [CrossRef]
- Zeng, X.; Zhao, B.; Liu, X.; Yu, Y.; Guo, J.; Qing, X. Lamb wave-based damage assessment for CFRP composite structures using a CHMM-based damage localization algorithm and a damage quantitative expression. Mech. Syst. Signal Process. 2023, 184, 109750. [Google Scholar] [CrossRef]
- Yang, X.; Ai, J.; Zhu, H.; Du, X.-B.; Li, D.-S.; Jiang, L.; Fang, D.-N. Multi-directional compression behaviors and failure mechanisms of 3D orthogonal woven composites: Parametric modeling and strength prediction. Mater. Des. 2022, 222, 111108. [Google Scholar] [CrossRef]
- Song, M.; Yang, J.; Kitipornchai, S. Bending and buckling analyses of functionally graded polymer composite plates reinforced with graphene nanoplatelets. Compos. Part B Eng. 2018, 134, 106–113. [Google Scholar] [CrossRef]
- Sayed, M.; Mousa, A.A.; Mustafa, I.H. Stability analysis of a composite laminated piezoelectric plate subjected to combined excitations. Nonlinear Dyn. 2016, 86, 1359–1379. [Google Scholar] [CrossRef]
- Mousa, A.A.; Sayed, M.; Eldesoky, I.M.; Zhang, W. Nonlinear stability analysis of a composite laminated piezoelectric rectangular plate with multi-parametric and external excitations. Int. J. Dyn. Control. 2014, 2, 494–508. [Google Scholar] [CrossRef]
- Song, M.; Kitipornchai, S.; Yang, J. Free and forced vibrations of functionally graded polymer composite plates reinforced with graphene nanoplatelets. Compos. Struct. 2017, 159, 579–588. [Google Scholar] [CrossRef]
- Lu, J.; Wang, P.; Zhan, Z. Active vibration control of thin-plate structures with partial SCLD treatment. Mech. Syst. Signal Process. 2017, 84, 531–550. [Google Scholar] [CrossRef]
- Sun, Y.; Song, Z.; Li, F. Theoretical and experimental studies of an effective active vibration control method based on the deflection shape theory and optimal algorithm. Mech. Syst. Signal Process. 2022, 170, 108650. [Google Scholar] [CrossRef]
- Chen, H.Y.; Mao, X.Y.; Ding, H.; Chen, L.Q. Elimination of multimode resonances of composite plate by inertial nonlinear energy sinks. Mech. Syst. Signal Process. 2020, 135, 106383. [Google Scholar] [CrossRef]
- Fang, Z.W.; Zhang, Y.W.; Li, X.; Ding, H.; Chen, L.Q. Integration of a nonlinear energy sink and a giant magnetostrictive energy harvester. J. Sound Vib. 2017, 391, 35–49. [Google Scholar] [CrossRef]
- Hu, W.; Gao, Y.; Yang, B. Semi-active vibration control of two flexible plates using an innovative joint mechanism. Mech. Syst. Signal Process. 2019, 130, 565–584. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Z.; Li, H.; Wong, P.K.; Xie, Z. Semi-active control for the nonlinear vibration suppression of square-celled sandwich plate with multi-zone MRE filler core. Mech. Syst. Signal Process. 2022, 172, 108953. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, Y.Q.; Zhou, S.X. Multistage oscillators for ultra-low frequency vibration isolation and energy harvesting. Sci. China Technol. Sci. 2022, 65, 631–645. [Google Scholar] [CrossRef]
- Ma, X.; Zhou, S. A review of flow-induced vibration energy harvesters. Energy Convers. Manag. 2022, 254, 115223. [Google Scholar] [CrossRef]
- Carboni, B.; Lacarbonara, W.; Brewick, P.T.; Masri, S.F. Dynamical response identification of a class of nonlinear hysteretic systems. J. Intell. Mater. Syst. Struct. 2018, 29, 2795–2810. [Google Scholar] [CrossRef]
- Carboni, B.; Lacarbonara, W.; Auricchio, F. Hysteresis of multiconfiguration assemblies of nitinol and steel strands: Experiments and phenomenological identification. J. Eng. Mech. 2015, 141, 04014135. [Google Scholar] [CrossRef]
- Brewick, P.T.; Masri, S.F.; Carboni, B.; Lacarbonara, W. Data-based nonlinear identification and constitutive modeling of hysteresis in NiTiNOL and steel strands. J. Eng. Mech. 2016, 142, 04016107. [Google Scholar] [CrossRef]
- Brewick, P.T.; Masri, S.F.; Carboni, B.; Lacarbonara, W. Enabling reduced-order data-driven nonlinear identification and modeling through naïve elastic net regularization. Int. J. Non-Linear Mech. 2017, 94, 46–58. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, K.; Zang, J.; Ni, Z.; Zhu, Y.; Chen, L. Dynamic design of a nonlinear energy sink with NiTiNOL-steel wire ropes based on nonlinear output frequency response functions. Appl. Math. Mech. 2019, 40, 1791–1804. [Google Scholar] [CrossRef]
- Liu, Z.; Niu, J.; Jia, R. Dynamic analysis of arbitrarily restrained stiffened plate under moving loads. Int. J. Mech. Sci. 2021, 200, 106414. [Google Scholar] [CrossRef]
- Mouritz, A.P.; Gellert, E.; Burchill, P.; Challis, K. Review of advanced composite structures for naval ships and submarines. Compos. Struct. 2001, 53, 21–42. [Google Scholar] [CrossRef]
- Prusty, B.G. Free vibration and buckling response of hat-stiffened composite panels under general loading. Int. J. Mech. Sci. 2008, 50, 1326–1333. [Google Scholar] [CrossRef]
- Shao, C.; Huang, Y. Advances in Shape Memory Alloy-Based Reinforcement in Steel Structures: A Review. Buildings 2023, 13, 2760. [Google Scholar] [CrossRef]
- Li, X.; Jin, G.; Deng, M. Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy. Sensors 2023, 23, 1133. [Google Scholar] [CrossRef]
- Tabrizikahou, A.; Kuczma, M.; Łasecka-Plura, M.; Farsangi, E.N.; Noori, M.; Gardoni, P.; Li, S. Application and modelling of Shape-Memory Alloys for structural vibration control: State-of-the-art review. Constr. Build. Mater. 2022, 342, 127975. [Google Scholar] [CrossRef]
- Zang, J.; Liu, P.P.; Zhang, Y.W.; Chen, L.Q. The performance of nonlinear vibration control via NiTiNOL–Steel wire ropes. Commun. Nonlinear Sci. Numer. Simul. 2023, 118, 107058. [Google Scholar] [CrossRef]
- Xue, J.R.; Zhang, Y.W.; Niu, M.Q.; Chen, L.Q. Vibration reduction in a composite laminated cylindrical shell via embedded NiTiNOL-steel wire ropes. Nonlinear Dyn. 2023, 111, 7181–7197. [Google Scholar] [CrossRef]
- Carboni, B.; Lacarbonara, W. Nonlinear dynamic characterization of a new hysteretic device: Experiments and computations. Nonlinear Dyn. 2016, 83, 23–39. [Google Scholar] [CrossRef]
- Zheng, L.H.; Zhang, Y.W.; Ding, H.; Chen, L.Q. Nonlinear vibration suppression of composite laminated beam embedded with NiTiNOL-steel wire ropes. Nonlinear Dyn. 2021, 103, 2391–2407. [Google Scholar] [CrossRef]
- Zang, J.; Zhang, Y.W. Responses and bifurcations of a structure with a lever-type nonlinear energy sink. Nonlinear Dyn. 2019, 98, 889–906. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Notation | Value | Unit |
|---|---|---|---|
| Length of composite plate | a | 600 | mm |
| Width of composite plate | b | 600 | mm |
| Thickness of composite plate | 8 | mm | |
| Web height of stiffener | 150 | mm | |
| Flange width of stiffener | 50 | mm | |
| Total layer | k | 10 | - |
| Density | 1760 | kg/ | |
| Young’s modulus in the x-direction | 110.3 | GPa | |
| Young’s modulus in the y-direction | 6.5 | GPa | |
| Poisson’s ratio | 0.23 | - | |
| Stiffness modulus | 12 | GPa |
| Item | (N/m) | (N/m3) | (Ns/m) | (Ns/m3) | (Ns2/m3) |
|---|---|---|---|---|---|
| N1a | - | 118.2 | |||
| N2a | 5966 | - | 52.1 | 9876 | |
| N2b | 4523 | - | 16.5 | 2608 | |
| N3a | 6016 | 50.0 |
| Scenario | Description | NiTi–ST Configuration | Number of NiTi–ST Elements | Placement | Damping Performance |
|---|---|---|---|---|---|
| Scenario 1 | Basic configuration with three NiTi–ST elements along the lengthwise direction. | NiTi–ST in lengthwise direction | 3 | Placed along the panel length | 22.2% damping efficiency |
| Scenario 2 | Increased damping with six NiTi–ST elements in the lengthwise direction. | NiTi–ST in lengthwise direction | 6 | Placed along the panel length | 11.1% damping efficiency |
| Scenario 3 | Optimized configuration with six NiTi–ST elements, three along the length and three along the width. | NiTi–ST in length and width directions | 6 | Three along the length and three along the width | 33.5% damping efficiency |
| Scenario 4 | Maximized vibration reduction with 12 NiTi–ST elements, six in both lengthwise and widthwise directions. | NiTi–ST in length and width directions | 12 | Evenly distributed, six in length and six in width | 15.7% damping efficiency |
| Average Efficiency (%) | Point 1 | Point 2 | Point 3 | Point 4 |
|---|---|---|---|---|
| Scenario 1 | 1.76 | 4.17 | 5.25 | 1.42 |
| Scenario 2 | 2.29 | 4.88 | 4.90 | 1.58 |
| Scenario 3 | 2.00 | 4.06 | 5.89 | 1.50 |
| Scenario 4 | 1.82 | 5.29 | 5.69 | 1.77 |
| Item | (N/m) | (N/) | (N·s/m) | (N·s/m3) | (N/) | R-Square |
|---|---|---|---|---|---|---|
| N1a | – | 120.40 | 0.9817 | |||
| N2a | 6166 | – | 55.09 | 9986 | 0.9966 | |
| N2b | 4623 | – | 18.49 | 2828 | 0.9943 | |
| N3a | 6316 | 52.96 | 0.9986 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Putranto, T.; Yulianto, T.; Sujiatanti, S.H.; Setyawan, D.; Zakki, A.F.; Muis Alie, M.Z.; Wibowo, W. Numerical Analysis of Composite Stiffened NiTiNOL-Steel Wire Ropes and Panels Undergoing Nonlinear Vibrations. Modelling 2025, 6, 77. https://doi.org/10.3390/modelling6030077
Putranto T, Yulianto T, Sujiatanti SH, Setyawan D, Zakki AF, Muis Alie MZ, Wibowo W. Numerical Analysis of Composite Stiffened NiTiNOL-Steel Wire Ropes and Panels Undergoing Nonlinear Vibrations. Modelling. 2025; 6(3):77. https://doi.org/10.3390/modelling6030077
Chicago/Turabian StylePutranto, Teguh, Totok Yulianto, Septia Hardy Sujiatanti, Dony Setyawan, Ahmad Fauzan Zakki, Muhammad Zubair Muis Alie, and Wibowo Wibowo. 2025. "Numerical Analysis of Composite Stiffened NiTiNOL-Steel Wire Ropes and Panels Undergoing Nonlinear Vibrations" Modelling 6, no. 3: 77. https://doi.org/10.3390/modelling6030077
APA StylePutranto, T., Yulianto, T., Sujiatanti, S. H., Setyawan, D., Zakki, A. F., Muis Alie, M. Z., & Wibowo, W. (2025). Numerical Analysis of Composite Stiffened NiTiNOL-Steel Wire Ropes and Panels Undergoing Nonlinear Vibrations. Modelling, 6(3), 77. https://doi.org/10.3390/modelling6030077