
Specific Characteristics of Numerical Simulation of Mechatronic Systems with PWM-Controlled Drives

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Problem Statement
- Calculate the function (6) of intersections at the trial step:
- Numerically calculate the increment of function (5) at the current i trial step:
- Determine a predicate for the presence of an event of a given type (increase, decrease, both) at the current trial step. For an increase, the predicate is defined as:For a decrease, the predicate is defined as:
- Calculate the upper limit of the step at the k+1 trial iteration of the integration methodwhere is the step reduction factor at iterations, taken equal to 0.55; is the integration step at the current trial step; is the value of function (5) at the previous accepted integration step; is the minimum specified integration step; is the step obtained by extrapolation method, if the event is not recorded at the intermediate step, which is calculated aswhere the extrapolation estimate of the integration step is calculated by the formulawhereThe step correction is performed based on considerations of gradual approach to the intersection point on the left and conjugation of the predicted step with the integration methods used.
- If the integration step at the next trial step satisfies the calculated upper constraint and exceeds the minimum specified integration step, then the integration method stops executing trial steps and performs the accepted step, provided that the specified accuracy in the dynamic and algebraic state variables is satisfied. If the specified accuracy is not met, the algorithm performs a trial integration step with the calculated limitations.
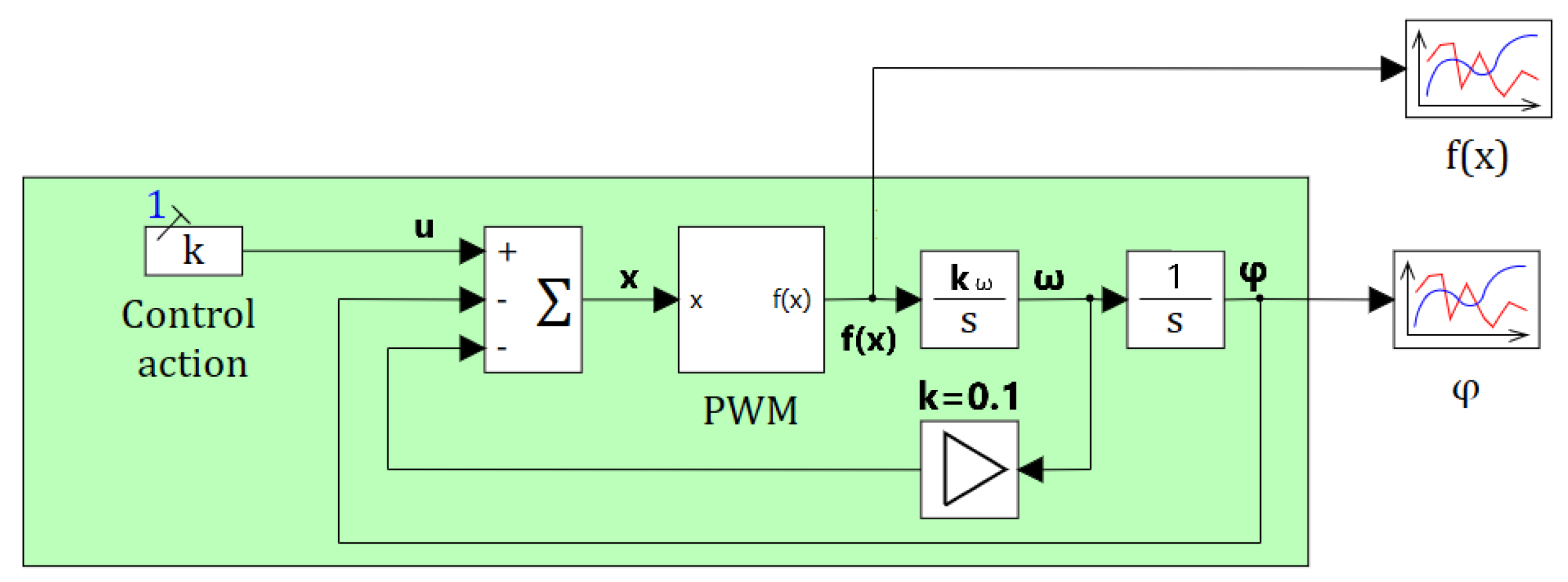
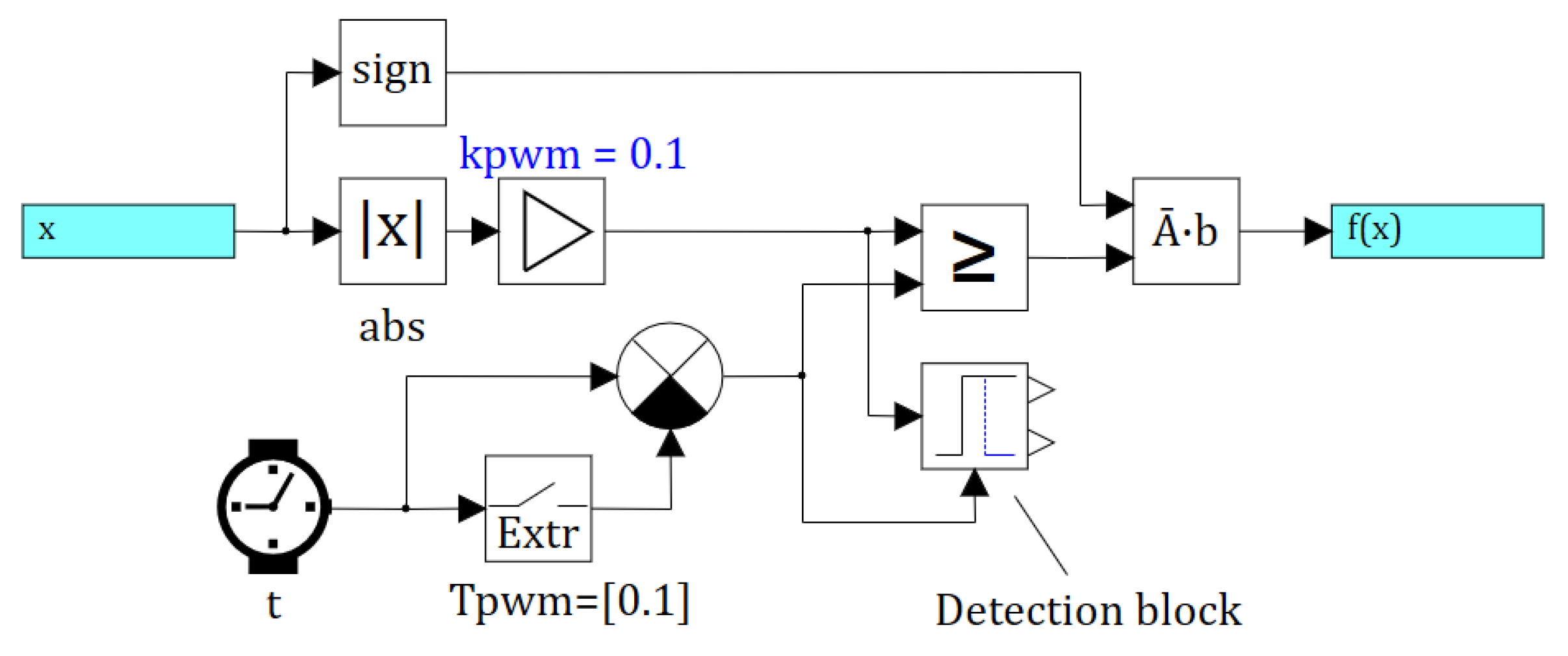
3. Testing the Detection Algorithm
4. Cross-Verification of the Intersection Detection Algorithm
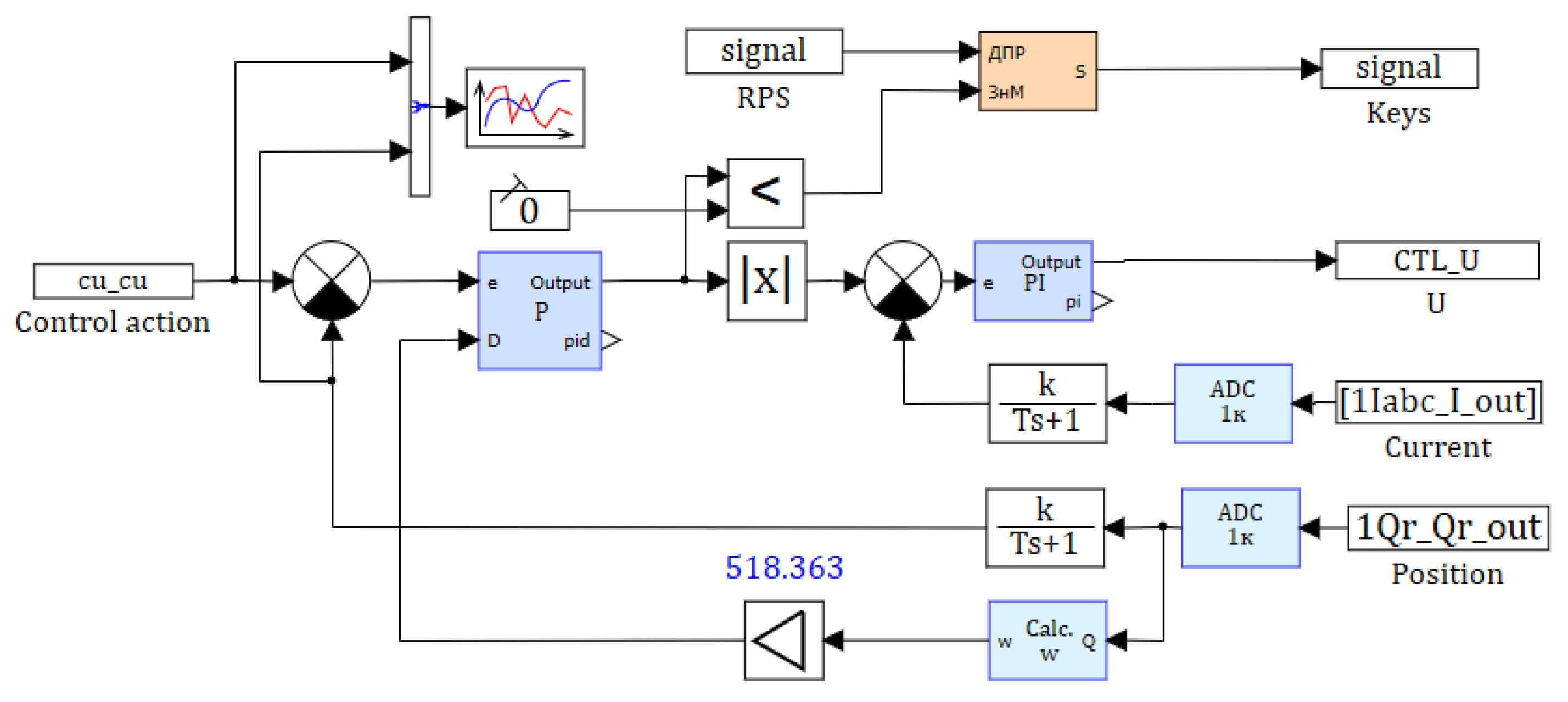
5. A Complex Electric Drive Model
6. Experimental Verification of the Electric Drive Model
- Inverter model;
- Electric motor model;
- Mechanical transmission model.
- No-load test:
- An unloaded motor controlled by rotor position sensor (RPS), with a nominal power supply (54.5 V), accelerated to real idle speed.
- The motor phase speed and current were measured.
- Similar conditions were simulated in SimInTech and the modelling results were compared with the experiment.
- Static load test:
- The RPS controlled motor was loaded to its nominal value using a load machine, with a nominal power supply (54.5 V).
- The motor phase speed and current were measured.
- Similar conditions were modelled in SimInTech and the modelling results were compared with the experiment.
- At the second stage, the mechanical transmission model was verified. The motor was connected to the mechanical transmission of the electric drive, and the dynamic impact response experiment was performed:
- The inverter was powered with a voltage of 54.5 V.
- A torque command was issued to an RPS-controlled motor in the form of a bipolar square wave of maximum amplitude of various frequencies.
- The position of the output rod of the electric drive and the inverter shunt current were measured.
- Similar conditions were simulated in SimInTech and the modelling results were compared with the experiment.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Meng, X.; Duan, Q.; Sha, G.; Wang, H.; Wang, X.; Lan, Z. An Efficiency Improvement Strategy for Triple-Active-Bridge-Based DC Energy Routers in DC Microgrids. Electronics 2024, 13, 1172. [Google Scholar] [CrossRef]
- Hakam, Y.; Gaga, A.; Tabaa, M.; El Hadadi, B. Enhancing Electric Vehicle Charger Performance with Synchronous Boost and Model Predictive Control for Vehicle-to-Grid Integration. Energies 2024, 17, 1787. [Google Scholar] [CrossRef]
- Kim, J.; Nguyen, M.-H.; Kwak, S.; Choi, S. Lifetime Extension Method for Three-Phase Voltage Source Converters Using Discontinuous PWM Scheme with Hybrid Offset Voltage. Machines 2023, 11, 612. [Google Scholar] [CrossRef]
- Zahaf, A.; Bouden, S.; Chadli, M.; Boulkaibet, I.; Neji, B.; Khezami, N. Dynamic Sensorless Control Approach for Markovian Switching Systems Applied to PWM DC–DC Converters with Time-Delay and Partial Input Saturation. Sensors 2023, 23, 6936. [Google Scholar] [CrossRef] [PubMed]
- Sakharuk, T.A.; Lehman, B.; Stankovic, A.M.; Tadmor, G. Effects of finite switching frequency and computational delay on PWM controlled servo DC drives. In Proceedings of the IAS ′97. Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; Volume 1, pp. 699–706. [Google Scholar] [CrossRef]
- Zeng, S.; Zhou, Q.; Yu, S.; Zhu, L.; Zhu, J.; Fu, H. A Three-Level RF-PWM Method Based on Phase-Shift Control and MPWM for ADTx. Electronics 2022, 11, 2905. [Google Scholar] [CrossRef]
- Zhou, Z.; Song, J.; Yu, Y.; Xu, Q.; Zhou, X. Research on High-Quality Control Technology for Three-Phase PWM Rectifier. Electronics 2023, 12, 2417. [Google Scholar] [CrossRef]
- Abdullah, R.; Smida, M.B.; Thamallah, A.; Khalaf, A.; Sakly, A. Novel DQ-Based Multicarrier PWM Strategy for a Single-Phase F-Type Inverter. Electronics 2023, 12, 2972. [Google Scholar] [CrossRef]
- Madhavan, M.; Nallaperumal, C.; Hossain, M.J. Segment Reduction-Based Space Vector Pulse Width Modulation for a Three-Phase F-Type Multilevel Inverter with Reduced Harmonics and Switching States. Electronics 2023, 12, 4035. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Mansour, A.S.; Sergeant, P. Comparison of 2L + 2M and 6L SVPWM for Five-Phase Inverter to Reduce Common Mode Voltage. Electronics 2023, 12, 3979. [Google Scholar] [CrossRef]
- Fernandez, M.; Robles, E.; Aretxabaleta, I.; Cortabarria, I.; Andrew, J.; Martín, J.L. A 3D Reduced Common Mode Voltage PWM Algorithm for a Five-Phase Six-Leg Inverter. Machines 2023, 11, 532. [Google Scholar] [CrossRef]
- Lim, S.-K.; Park, J.-H.; Jun, H.-S.; Hwang, K.-B.; Hwangbo, C.; Lee, J.-H. High-Speed Tracking Controller for Stable Power Control in Discontinuous Charging Systems. Electronics 2023, 13, 183. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Q.; Wang, M.; Fu, H. An Outphasing Architecture Based on Parallel Radio Frequency–Pulse Width Modulation Method for All-Digital Transmitter. Electronics 2024, 13, 263. [Google Scholar] [CrossRef]
- Hou, B.; Qi, J.; Li, H. Robust Direct Power Control of Three-Phase PWM Rectifier with Mismatched Disturbances. Electronics 2024, 13, 1476. [Google Scholar] [CrossRef]
- Guo, X.; Qiao, J.; Li, Y.; Jiao, S. A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters. Energies 2024, 17, 1832. [Google Scholar] [CrossRef]
- Renz, E.C.; Turso, J. Toward the Application of Pulse Width Modulated (PWM) Inverter Drive-Based Electric Propulsion to Ice Capable Ships. Energies 2022, 15, 8217. [Google Scholar] [CrossRef]
- Diaz, R.I.V.; Cruz, N.V.; Ramírez, J.S. A Polynomial Synthesis Approach to Design and Control of an LCL-Filter-Based PWM Rectifier with Extended Functions Validated by SIL Simulations. Energies 2023, 16, 7382. [Google Scholar] [CrossRef]
- Ma, B.; Chai, L.; Lu, J.; Sun, S. Pulse Width Modulation-Controlled Switching Impedance for Wireless Power Transfer. Energies 2023, 16, 8103. [Google Scholar] [CrossRef]
- Do, T.A.; Nguyen, Q.D.; Vu, P.; Ngo, M.D.; Ahn, S.-J. Comparative Analysis of PWM Techniques for Interleaved Full Bridge Converter in an AC Battery Application. Energies 2024, 17, 375. [Google Scholar] [CrossRef]
- Kroičs, K.; Būmanis, A. BLDC Motor Speed Control with Digital Adaptive PID-Fuzzy Controller and Reduced Harmonic Content. Energies 2024, 17, 1311. [Google Scholar] [CrossRef]
- Achitaev, A.A.; Suslov, K.V.; Nazarychev, A.N.; Volkova, I.O.; Kozhemyakin, V.E.; Voloshin, A.A.; Minakov, A.V. Application of Electromagnetic Continuous Variable Transmission in Hydraulic Turbines to Increase Stability of an Off-Grid Power System. Renew. Energy 2022, 196, 125–136. [Google Scholar] [CrossRef]
- Suvorov, A.; Askarov, A.; Bay, Y.; Maliuta, B.; Achitaev, A.; Suslov, K. Comparative Small-Signal Stability Analysis of Voltage-Controlled and Enhanced Current-Controlled Virtual Synchronous Generators under Weak and Stiff Grid Conditions. Int. J. Electr. Power Energy Syst. 2023, 147, 108891. [Google Scholar] [CrossRef]
- Chemodanov, B.K.; Blaze, E.S.; Zimin, A.V.; Ivanov, E.S. Servo drives: In 3 Volumes—2nd ed., Add. and Processed. Vol. 1: Theory and Design of Servo Drives [Sledyashchie Privody: V 3 t./Pod red. B. K. Chemodanova.—2. izd., Dop. i Pererab. T. 1: Teoriya i Proektirovanie Sledyashchih Privodov]; Publishing House of MSTU im. N. E. Bauman: Moscow, Russia, 1999; 903p, ISBN 5-7038-1383-2. Available online: https://search.rsl.ru/en/record/01000622429 (accessed on 29 September 2024). (In Russian)
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations II: Stiff and Differential Algebraic Problems, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Skvortsov, L.M. Numerical Solution of Ordinary Differential and Differential-Algebraic Equations [Chislennoye Resheniye Obyknovennykh Differentsial’nykh i Differentsial’no-algebraicheskikh Uravneniy]; DMK Press: Moscow, Russia, 2018; pp. 5–225. ISBN 978-5-97060-636-0. (In Russian) [Google Scholar]
- Popov, E.A.; Shornikov, Y.V. Detection of events of various types in hybrid dynamic systems [Detektsiya sobytiy raznogo tipa v gibridnykh dinamicheskikh sistemakh]. Data Anal. Process. Syst. 2020, 4, 159–176. (In Russian) [Google Scholar]
- Kartashov, B.A.; Shabaev, E.A.; Kozlov, O.S.; Shchekaturov, A.M. The Environment for Dynamic Modeling of Technical Systems SimInTech: A Workshop on Modeling Automatic Control Systems [Sreda Dinamicheskogo Modelirovaniya Tekhnicheskikh Sistem SimInTech: Praktikum po Modelirovaniyu Sistem Avtomaticheskogo Regulirovaniya]; DMK Press: Moscow, Russia, 2017; pp. 90–200. ISBN 978-5-97060-482-3. (In Russian) [Google Scholar]
- Novikov, E.A.; Shornikov, Y.V. Computer Simulation of Stiff Hybrid Systems: Monograph [Komp`yuternoe Modelirovanie Zhestkix Gibridny`x Sistem: Monografiya]; Publishing House—NSTU: Novosibirsk, Russia, 2013; 451p, ISBN 978-5-7782-2023-2. (In Russian) [Google Scholar]
- Esposito, J.; Kumar, V.; Pappas, G.J. Accurate event detection for simulating hybrid systems. In Hybrid Systems: Computation and Control (HSCC); Springer: Berlin/Heidelberg, Germany, 1998; Volume LNCS 2034. [Google Scholar]
- Skvortsov, L.M. Construction and analysis of explicit adaptive one-step methods for numerical solution of stiff problems [Postroyeniye i analiz yavnykh adaptivnykh odnoshagovykh metodov chislennogo resheniya zhestkikh zadach]. J. Comput. Math. Math. Phys. [Z. Vychislitel’noy Mat. Mat. Fiz.] 2020, 60, 1111–1125. (In Russian) [Google Scholar] [CrossRef]
- Ali, H.J.; Shary, D.K.; Abbood, H.D. A Review of Intelligent Techniques Based Speed Control of Brushless DC Motor (BLDC). Basrah J. Eng. Sci. 2024, 24, 109–119. [Google Scholar]
- Boustead, R. Special stability analysis for the Shichman formula. Electron. Lett. 1971, 7, 127–129. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ISMA 2007 | SimInTech Reference | SimInTech without Detection | SimInTech with Intersection Refinement | SimInTech with Intersection Refinement and Specification of Step for Discrete Blocks |
|---|---|---|---|---|---|
| Integration method | STEKS | ARK32v1 | |||
| Number of function calls | 6425 | 3028 | 2195 | 1630 | 1865 |
| Number of integration steps | 1285 | 1109 | 479 | 330 | 377 |
| Number of trial steps | n/a | 169 | 202 | 22 | 22 |
| Standard deviation | n/a | 0 | 0.03011187 | 0.015199124 | 0.0000393341 |
| Method | Euler | ARK21 with Detection | SimInTech without Detection |
|---|---|---|---|
| Position at the end of the modelling | 0.00999914934636218 | 0.0100026831685805 | 0.0100020459415512 |
| 4,530,403 | 1,701,481 | 1,133,284 | |
| , s | 60.7 | 18.29 | 11.98 |
| Parameter | Value |
|---|---|
| Winding resistance | 0.3 ohm |
| Winding inductance | 0.00027 H |
| Rotor flux linkage | 0.0137 Wb |
| Number of pole pairs | 2 |
| Moment of inertia | 4.45 × 10 −6 kg m2 |
| Parameter | Value |
|---|---|
| Friction coefficient on the motor shaft | 0.00001 |
| Motor—gearbox backlash | 0.013 (rad) |
| Gearbox moment of inertia | 0.00000276 kg m2 |
| Gearbox transmission ratio | 3.3 |
| Gearbox—ball screw backlash | 0.0063 |
| Ball screw moment of inertia | 0.00000914 kg m2 |
| Ball screw transmission ratio | 1 571 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Achitaev, A.; Timofeev, K.; Suslov, K.; Kalachev, Y.; Shornikov, Y. Specific Characteristics of Numerical Simulation of Mechatronic Systems with PWM-Controlled Drives. Modelling 2024, 5, 1375-1394. https://doi.org/10.3390/modelling5040071
Achitaev A, Timofeev K, Suslov K, Kalachev Y, Shornikov Y. Specific Characteristics of Numerical Simulation of Mechatronic Systems with PWM-Controlled Drives. Modelling. 2024; 5(4):1375-1394. https://doi.org/10.3390/modelling5040071
Chicago/Turabian StyleAchitaev, Andrey, Konstantin Timofeev, Konstantin Suslov, Yuri Kalachev, and Yuri Shornikov. 2024. "Specific Characteristics of Numerical Simulation of Mechatronic Systems with PWM-Controlled Drives" Modelling 5, no. 4: 1375-1394. https://doi.org/10.3390/modelling5040071
APA StyleAchitaev, A., Timofeev, K., Suslov, K., Kalachev, Y., & Shornikov, Y. (2024). Specific Characteristics of Numerical Simulation of Mechatronic Systems with PWM-Controlled Drives. Modelling, 5(4), 1375-1394. https://doi.org/10.3390/modelling5040071