
Development of a Framework for Wind Turbine Design and Optimization



Abstract
:1. Introduction
- involves all system components, as well as their fully coupled aero-hydro-servo-elastic behavior;
- is based on scientific fundamentals without the need for approximations;
- uses systematic methods;
- can potentially be extended to any level of detail and used for any optimization problem,
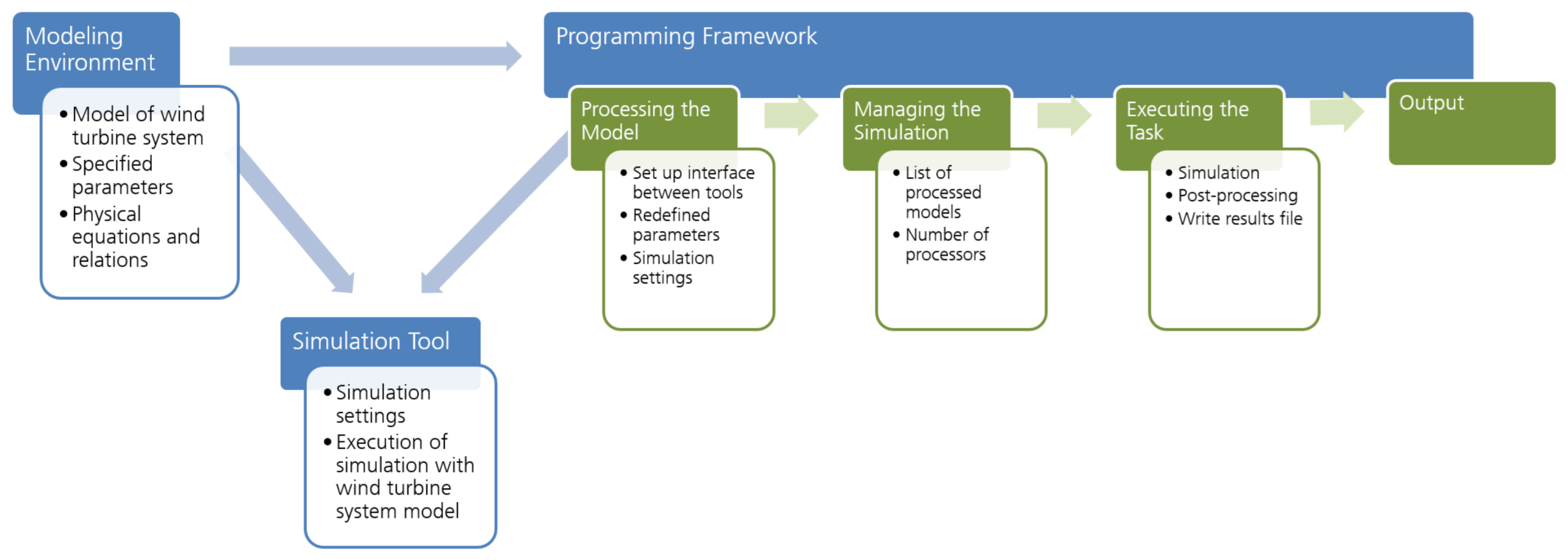
2. Framework for Automated Simulation
2.1. Modeling Environment
- Bladed (https://www.dnvgl.com/energy/generation/software/bladed/index.html, accessed on 12 November 2018) by DNV GL, which is a wind turbine design and simulation software, by which means both the wind turbine and its environment can be modeled [32];
- FAST (https://nwtc.nrel.gov/FAST, accessed on 12 November 2018) (Fatigue, Aerodynamics, Structures, and Turbulence) by NREL (National Renewable Energy Laboratory), which is an aero-elastic simulation tool for horizontal axis wind turbines, based on a code containing models for aero-, hydro-, control, and structural dynamics [33];
- HAWC2 (http://www.hawc2.dk/, accessed on 12 November 2018) (Horizontal Axis Wind turbine simulation Code 2nd generation) developed at Risø National Laboratory in Denmark, which is an aero-elastic code for wind turbine design and load simulation and covers various models for dealing with aero-, hydro-, control, and structural dynamics [34];
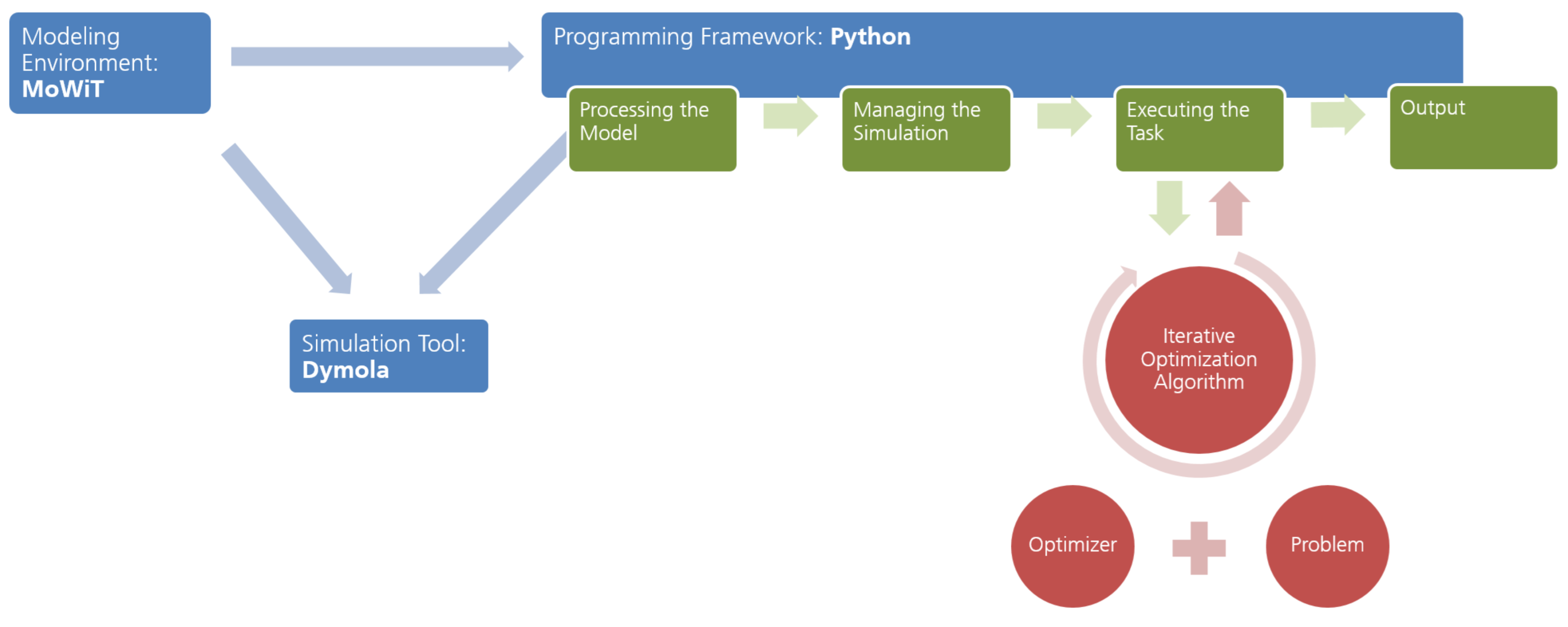
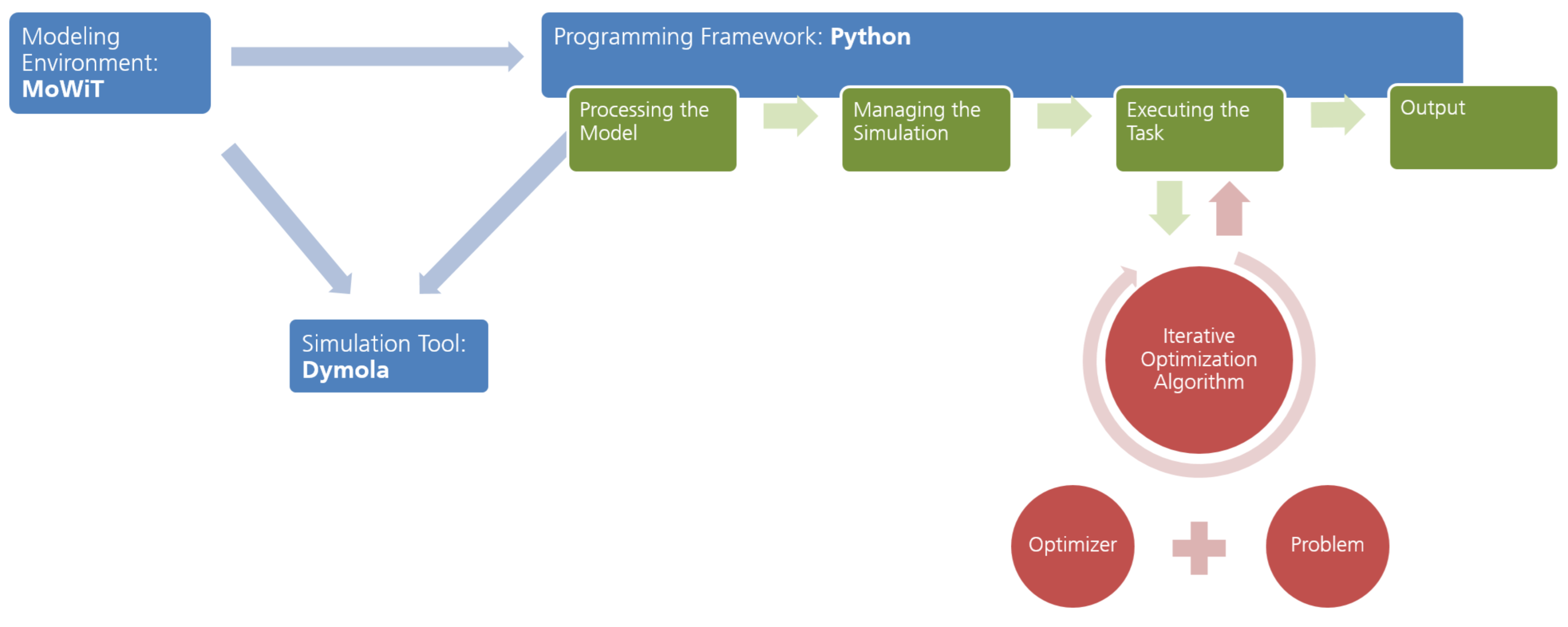
- MoWiT developed at Fraunhofer IWES (Institute for Wind Energy Systems) in Bremerhaven, Germany, which is a library based on the open-source object-oriented and equation-based modeling language Modelica® (https://www.modelica.org/, accessed on 2 October 2019) and by which means the entire wind turbine system can be represented through models for each single component, including the environment and aero-hydro-servo-elastic dynamics [35,36,37].
- High flexibilityDue to the object-oriented and equation-based modeling language Modelica®, its hierarchical programming structure, and its multibody approach, the complex wind turbine system can be represented through component-based computational models. Thus, MoWiT contains six main components (rotor, nacelle, operating control, support structure, wind, and waves), which comprise further subcomponents, such as the hub and blades within the rotor component, the drivetrain and generator within the nacelle component, or within the support structure component the tower, substructure, as well as ballast and mooring lines in case of a floating system. The single components and models are interconnected to represent the fully coupled aero-hydro-servo-elastic behavior of wind turbine systems. By adapting or exchanging single components, any state-of-the-art wind turbine system type (onshore or offshore, bottom-fixed or floating), various environmental conditions, and different simulation settings can be modeled.
- Continuous enhancement and extensionMoWiT is developed by engineers at Fraunhofer IWES. This allows continuous enhancement and extension of the library, including also verification and validation of the code [35,38,39,40,41]. Thus, different theories and approaches are implemented to represent the aero-hydro-servo-elastic dynamics of a wind turbine system and the degree of detail is refined on and on. The current capability of the in-house tool MoWiT is as follows [35,36,37,40]:
- -
- The blade-element-momentum theory with dynamic stall and dynamic wake, or the generalized dynamic wake model with dynamic stall, or stochastic wind and gust models can be utilized to represent unsteady aerodynamics.
- -
- The hydrodynamic loads due to regular or irregular waves can be determined based on the Morison equation or the MacCamy–Fuchs approach, with having different wave theories (linear Airy or non-linear Stokes) available and optionally accounting for wave stretching (Wheeler or linear extrapolation). Additionally, buoyancy loads, as well as loads from different current types (breaking wave induced, wind-generated, or sub-surface), are considered.
- -
- The servo dynamics are represented by means of a built-in operating control or a generic dynamic link library interface.
- -
- Finally, the elastic behavior is addressed with the aid of the multibody approach, using Euler-Bernoulli or Timoshenko beam elements. Blades and tower can as well be represented by modal reduced anisotropic beams, considering deflection and torsion, and even accounting for bent-twist coupling effects in the blades.
- Broad range of applicationsApart from the fully coupled time-domain simulation of wind turbine systems, MoWiT serves as basis for a wide range of other applications, such as
- -
- real-time simulations in a hardware-in-the-loop environment;
- -
- usage of components in MATLAB and Simulink;
- -
- automated simulation of DLCs;
- -
- automated system and component optimization [42].
The latter two are realized by means of the framework for wind turbine design and optimization presented in this work.
2.2. Simulation Tool
- The Bladed software package directly contains modules for executing simulations, results analyses and post-processing, as well as batch calculations [32].
- The FAST tool also not only contains code and models, but is as well capable of executing time-domain simulations [33].
- Within the HAWC2 code there is directly a simulation command block which specifies the simulation settings when executing the file [34].
- However, in order to translate and simulate Modelica® models, a separate simulation environment is required. There is a huge number of commercial and free tools (https://www.modelica.org/tools, accessed on 12 November 2018), which can be used together with Modelica®. At Fraunhofer IWES, Dymola® (Dynamic modeling laboratory) by Dassault Systèmes [43,44] is utilized for simulating MoWiT models in time-domain, due to the available interfaces to MATLAB and Simulink and as Dymola® is highly suitable for system models which obey a large number of equations.
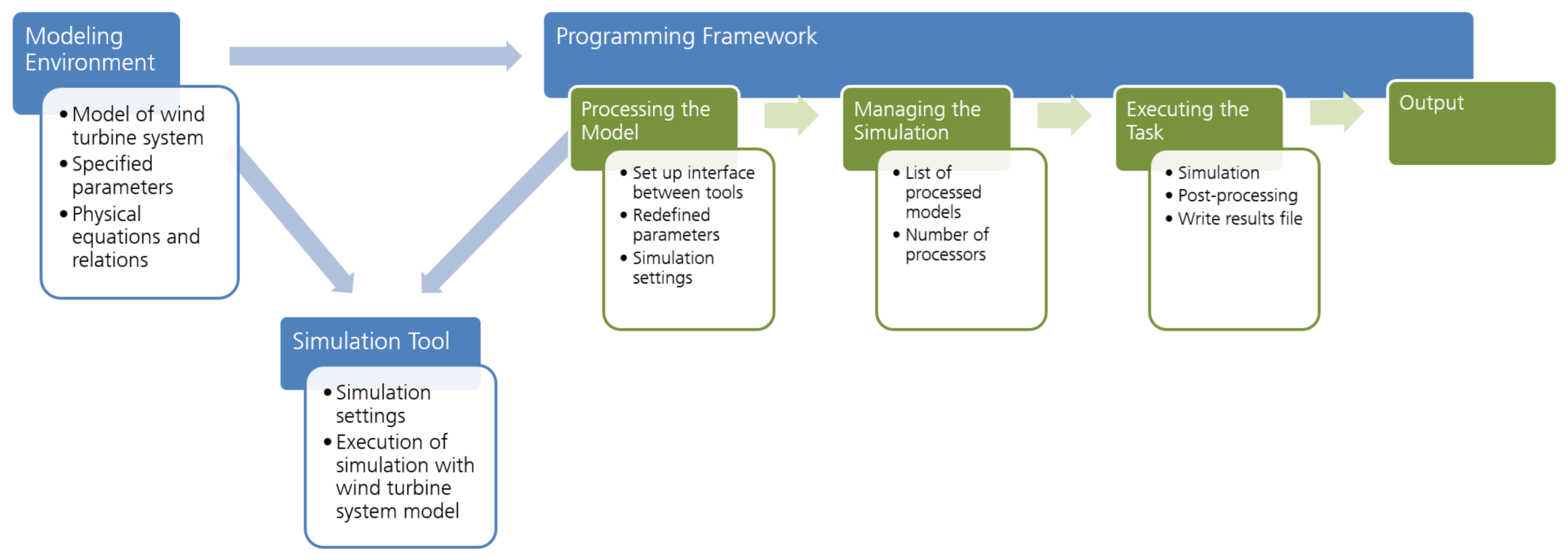
2.3. Programming Framework
2.3.1. Processing the Model
2.3.2. Managing the Simulation
2.3.3. Executing the Task
2.3.4. Output
2.3.5. Exemplary Programming Framework
3. Application to DLC Simulations
3.1. The Role of DLCs for Wind Turbine Systems
3.2. Realization of DLC Simulations with the Framework for Automated Simulation
4. Incorporation of Optimization Functionalities
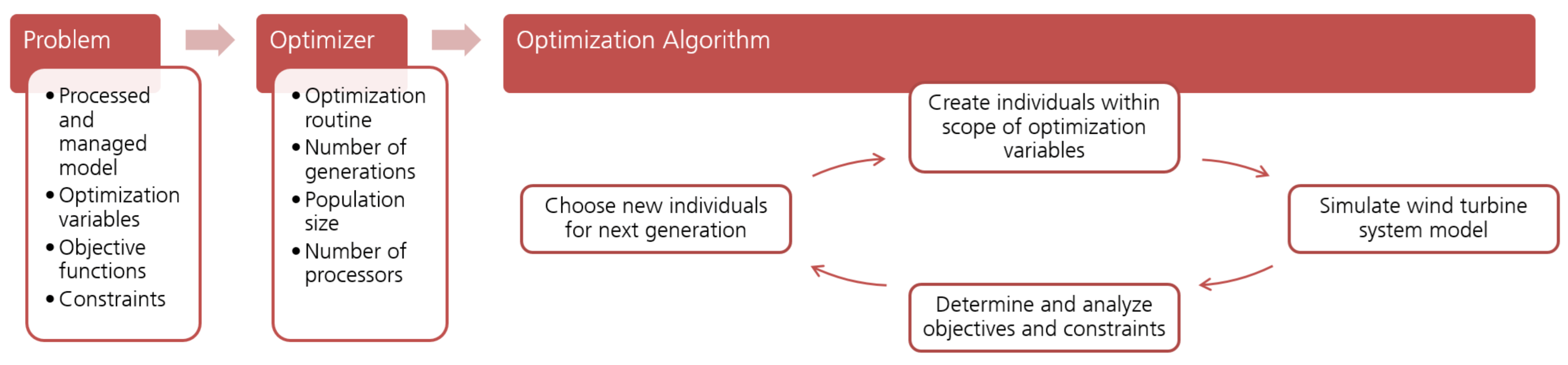
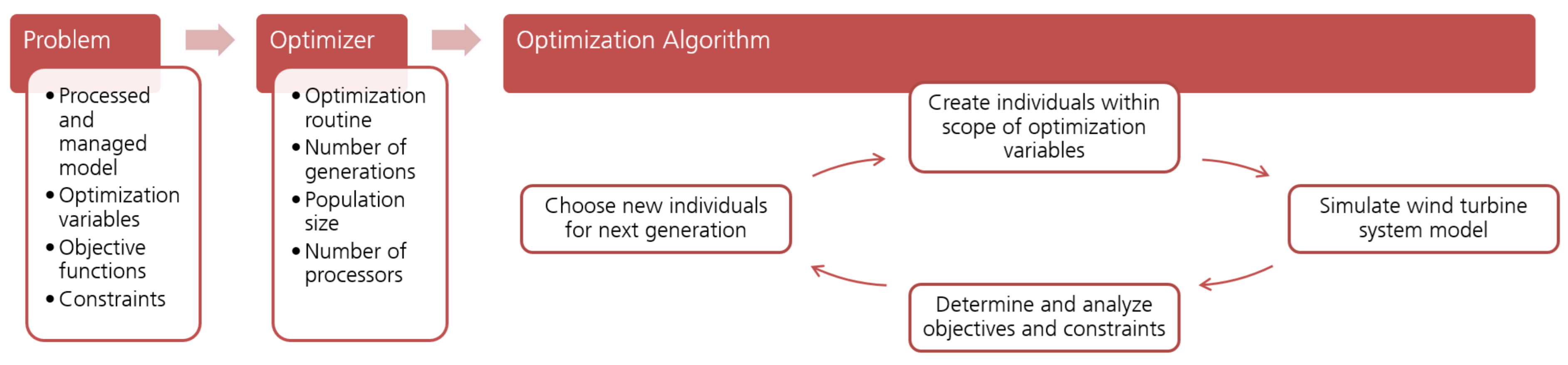
4.1. The Optimization Problem
4.1.1. Optimization Variables
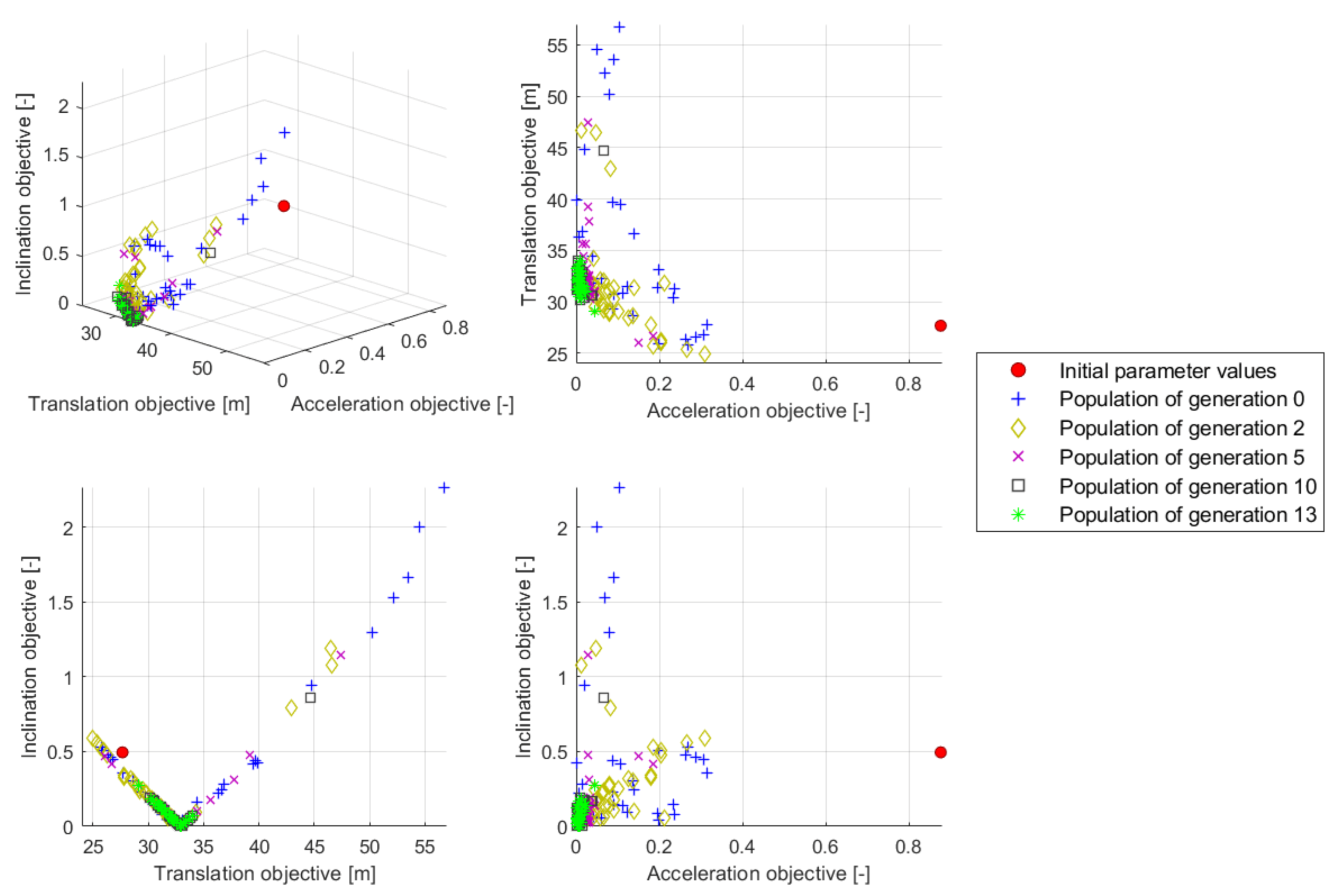
4.1.2. Objective Functions
4.1.3. Constraints
4.2. The Optimizer
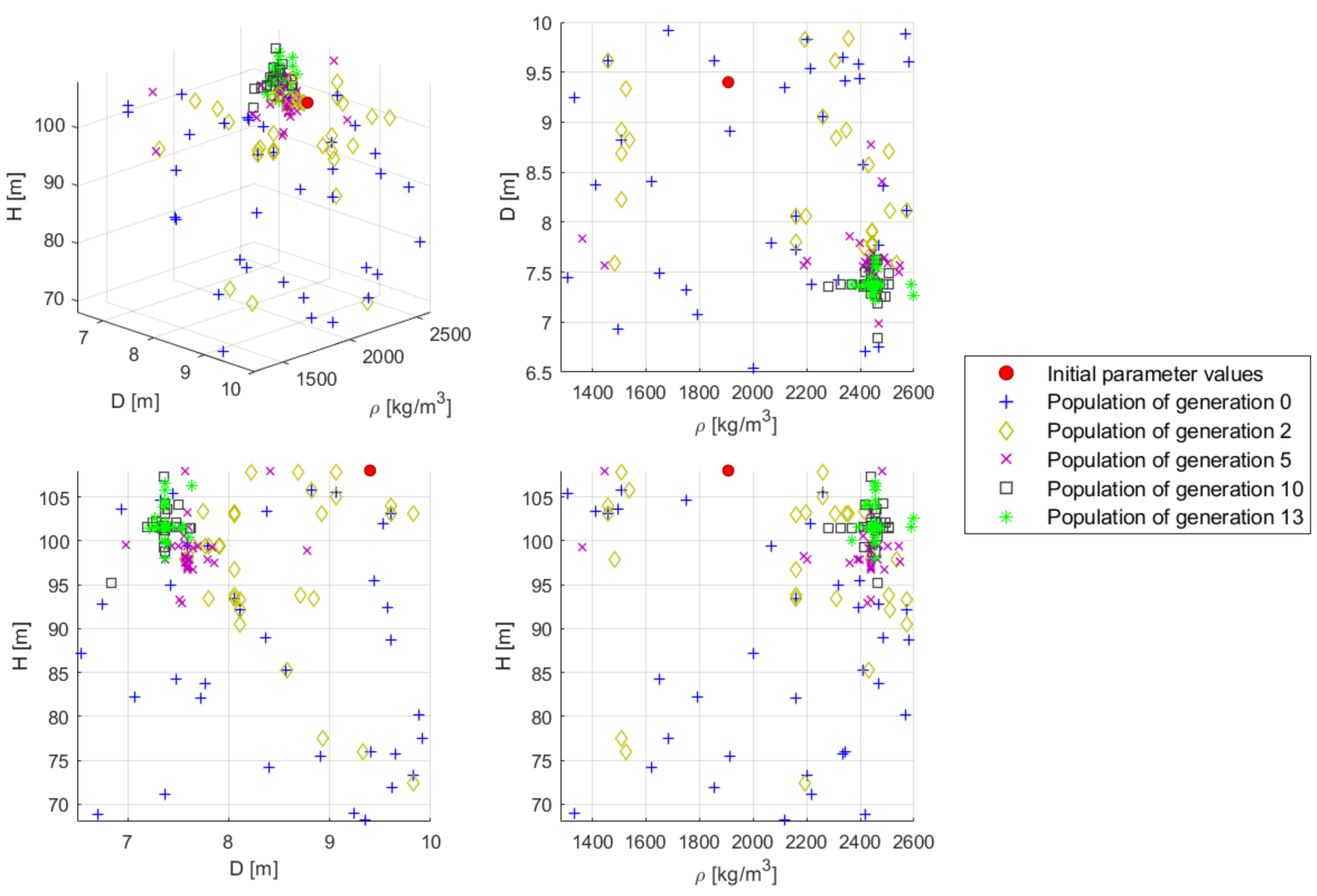
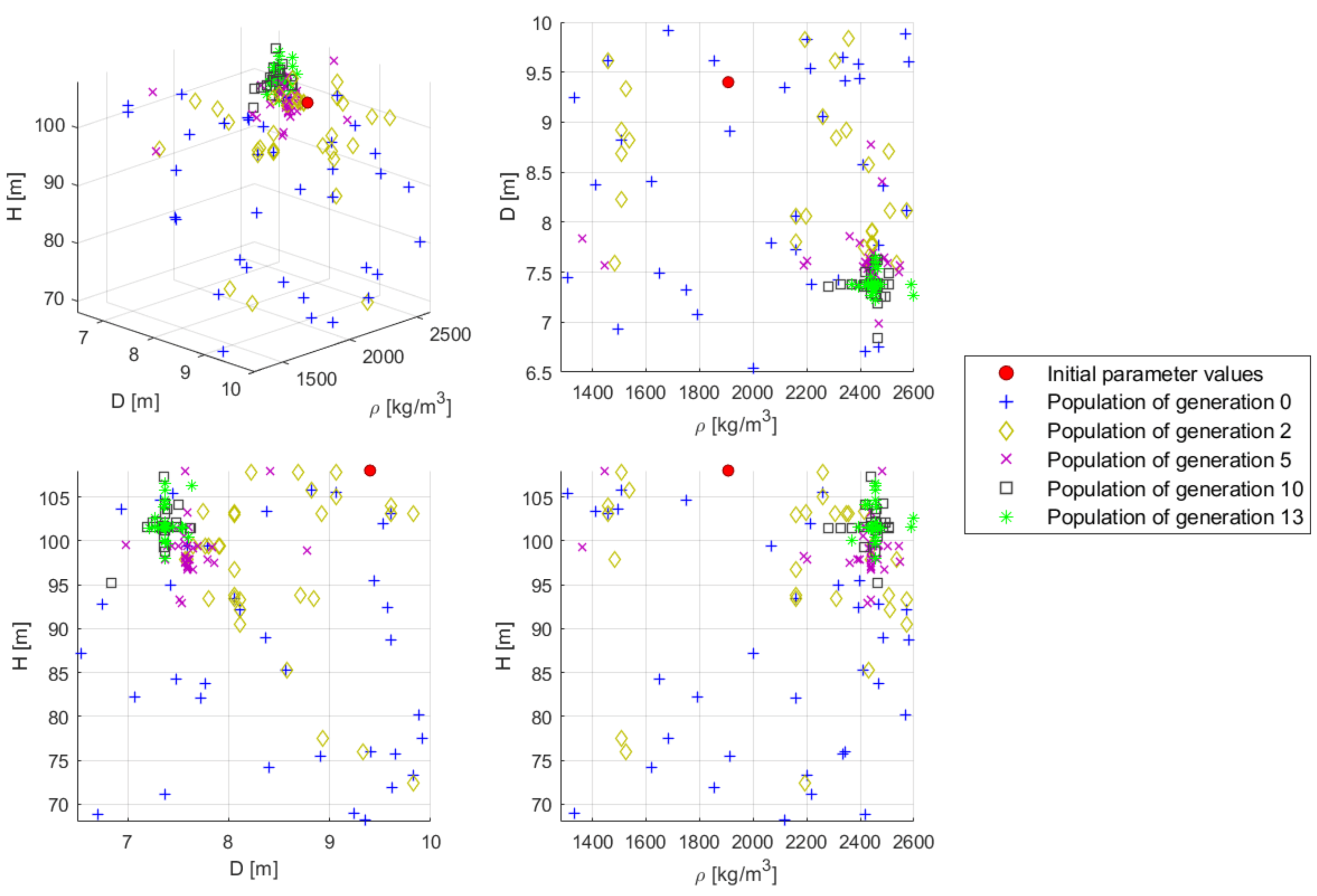
- Population size:As EAs work with populations, in which the individuals are modified from generation to generation, the number of individuals in each generation, meaning the size of the population, has to be provided. According to this number, a randomly distributed start population (generation 0) is created within the prescribed value ranges of the design variables. Depending on the fitness of each individual—meaning how good the individual is in terms of the objectives—as well as its compliance with the specified constraints, some individuals are selected, or recombined, or mutated, and a new set of individuals is created as population of the next generation.
- Number of generations:The iterative generation of populations continues until a stop criterion is reached. This is mostly a maximum number of generations to be created and simulated. Thus, the number of generations has to be specified and given as input to the optimizer.
- Number of processors:With the ability of running simulations in parallel—depending on the capabilities of the programming framework and computer system—the number of processors can be provided as well. This option of multi-processing is highly beneficial for optimization applications, as it allows for parallel simulation of several individuals of one generation.
4.3. The Optimization Algorithm
5. Application of the Framework to Optimization Tasks for Wind Turbine Systems
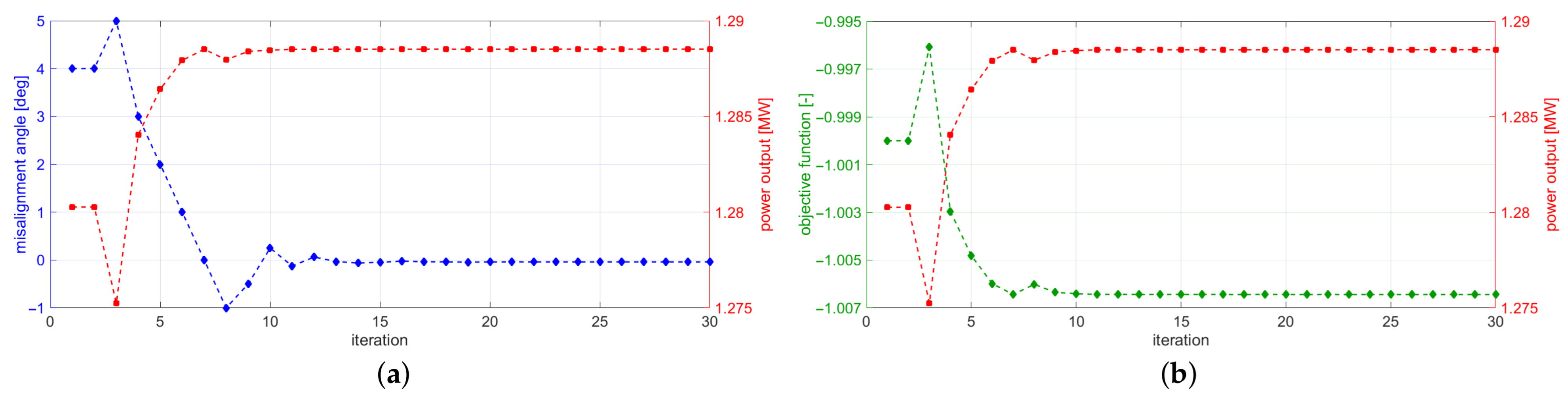
5.1. Plausibility Check of an Optimization Routine
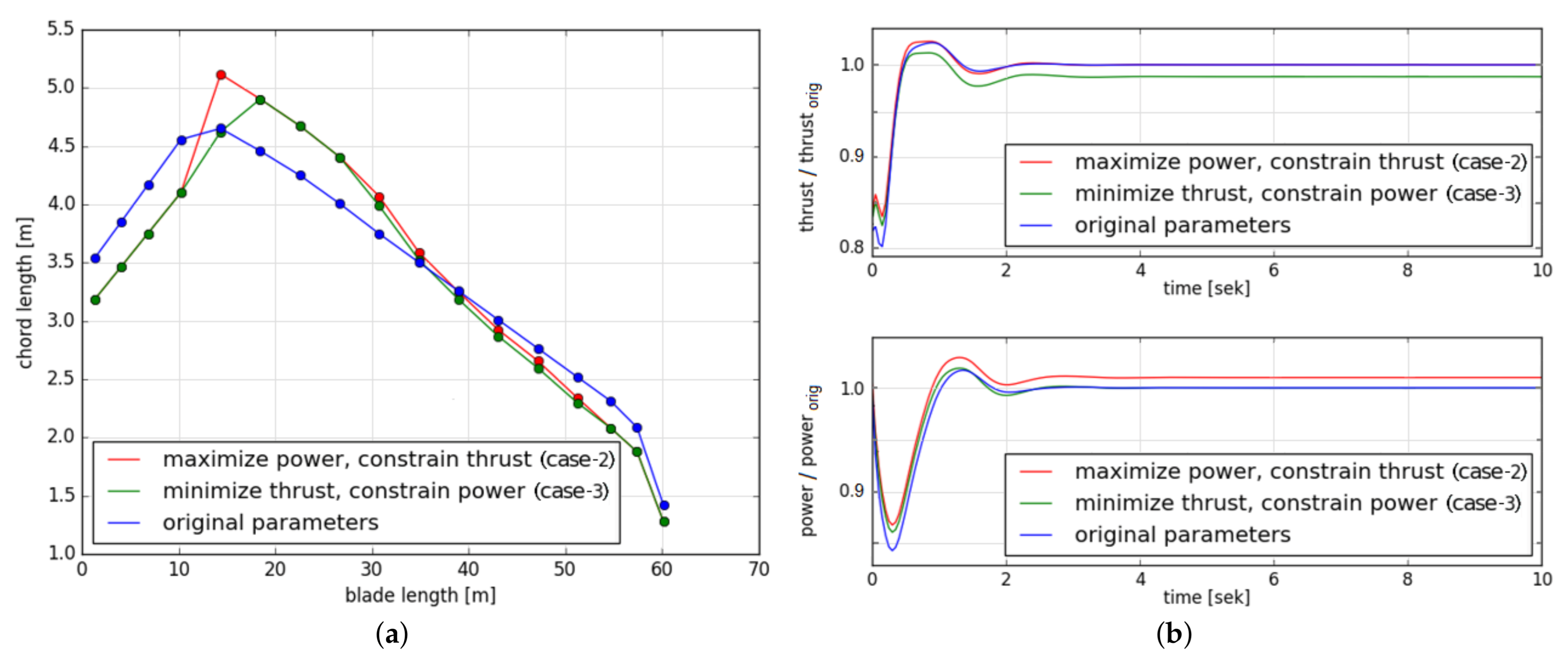
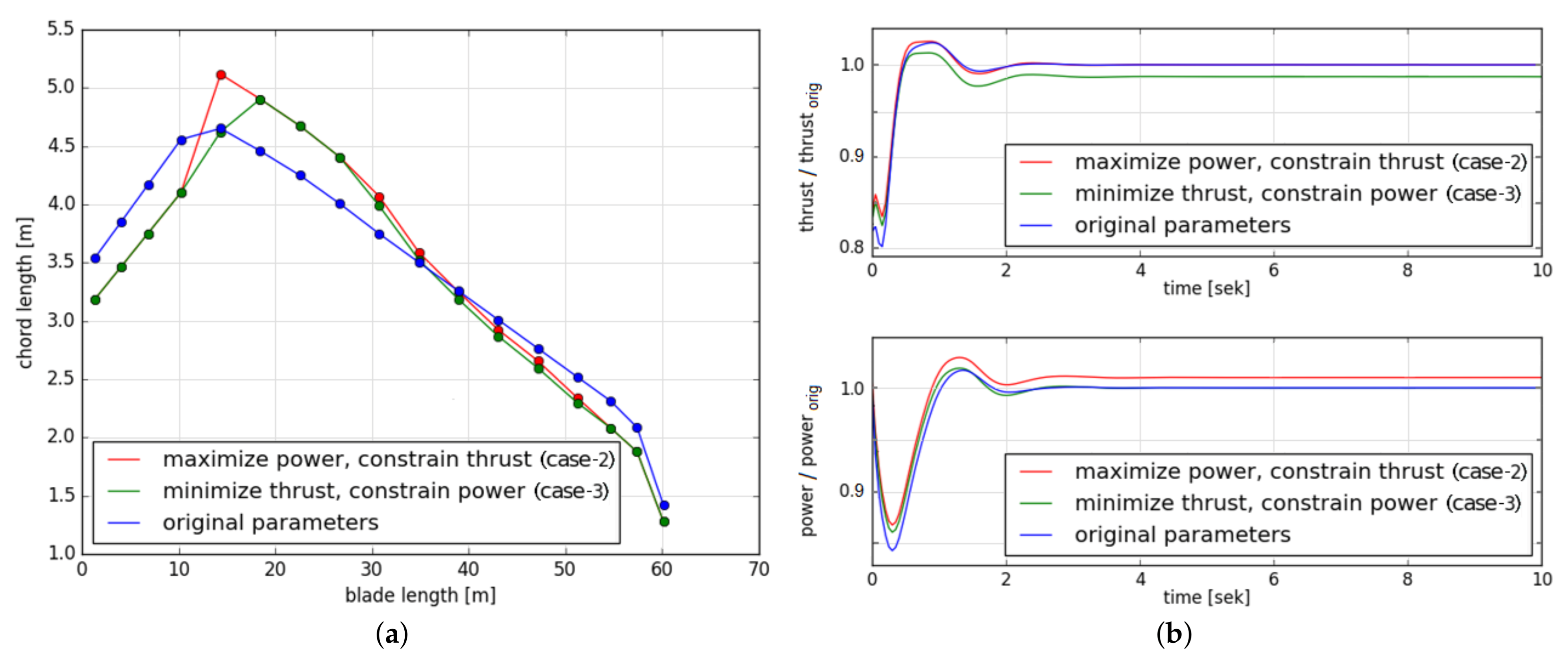
5.2. Power Output vs. Thrust Force
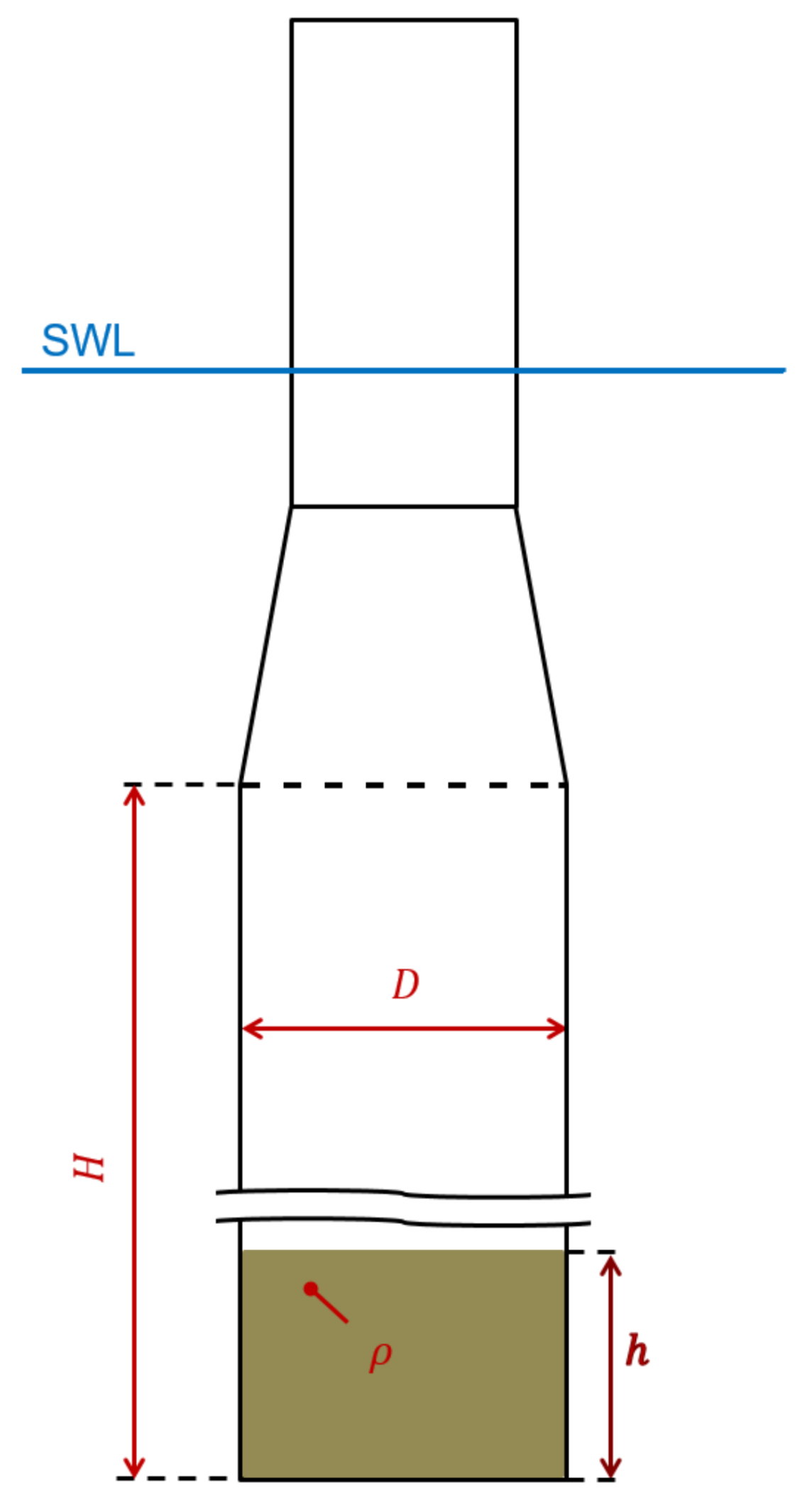
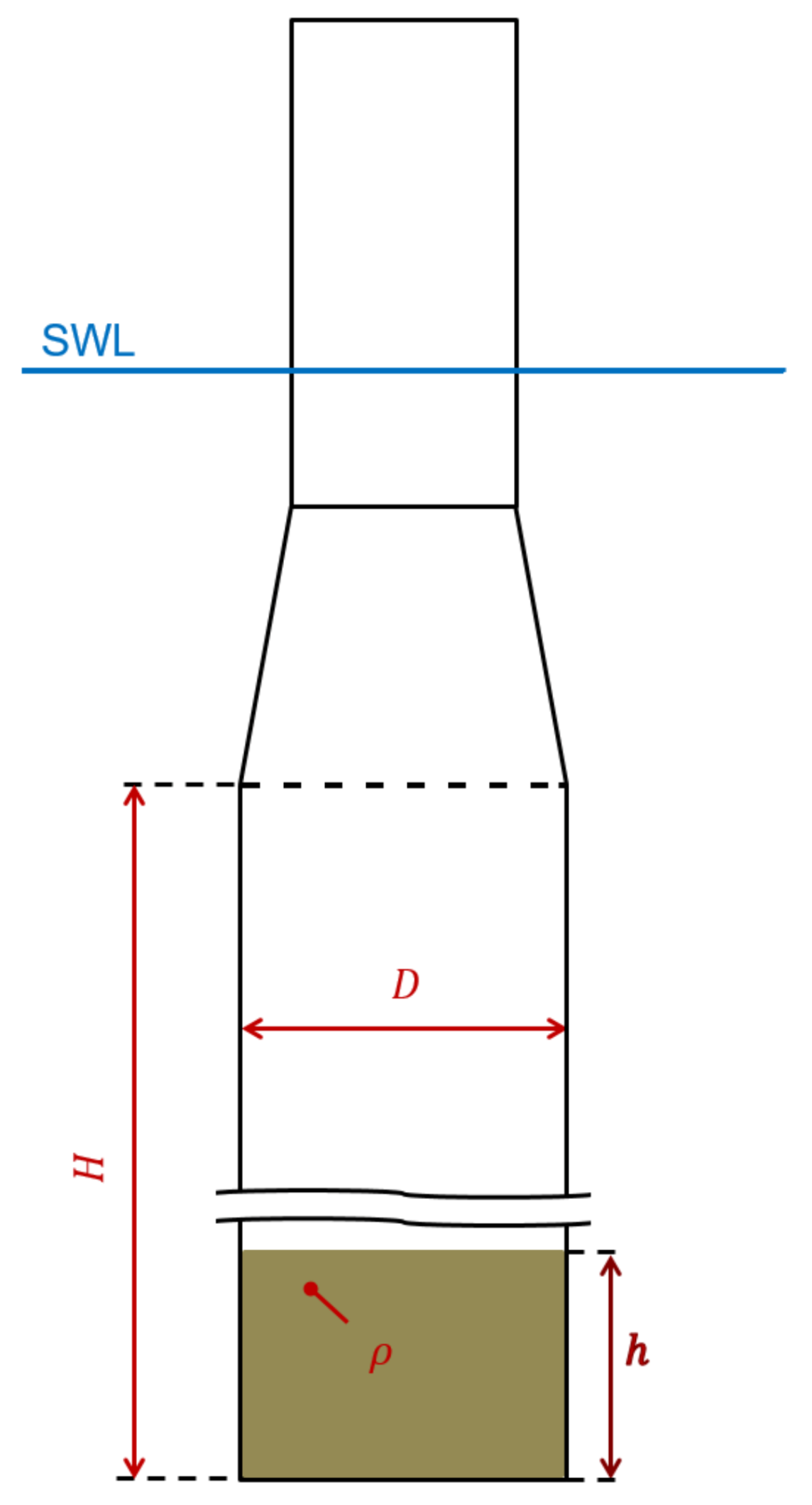
5.3. Floater Design Optimization
- The diameter D of the spar-buoy column;
- The height H of the spar-buoy column;
- The density of the ballast.
- follows a gradient-free method, which is essential for the highly complex floating wind turbine system considered in this optimization task, as already emphasized in Section 5.1 and Section 5.2;
- is a MO optimizer and, hence, can easily deal with the three distinct objective functions;
- belongs to the category of EAs, which are highly suitable for finding the global optimum, even when dealing with MO optimization problems and highly complex engineering systems, as already highlighted in Section 4.2;
- performed in a preceding comparative study, utilizing as well other gradient-free and MO optimizers from Platypus (such as NSGAIII or SPEA2), best with respect to convergence speed and compliance with the constraints.
6. Future Developments
- As already presented in Section 5.3, design optimization is a key application, useful and required within the design process of a wind turbine system (either the whole system or only single components, such as the tower, support structure, or even the mooring system in case of a floating offshore wind turbine). The focus of interest within such a design optimization could range from costs and material usage, loads and lifetime, as well as system performance and response, as pointed out in Section 1. The presented framework tool can, thus, be used, for example, just for obtaining a fast preliminary design to do a cost estimation for the initial planning of ((floating) offshore) wind turbines or—on the other hand—for a very detailed reliability-based design optimization to improve the system reliability and, this way, reduce the downtime of an offshore (floating) system due to defects and long waiting times for proper weather windows for doing maintenance and repair work.
- Apart from the more structural-based design optimization, also the control system of the wind turbine needs to be tuned and optimized for the specific purpose. The control system is an essential component, which regulates the wind turbine performance. By pitching the blades, the amount of power extracted from the wind, as well as the thrust force acting on the rotor, are influenced. Below rated wind speed, the blades are not pitched so that the maximum possible power can be extracted, while above rated wind speed, the blade pitch angle is regulated to maintain constant power output or generator torque (depending on the wind turbine control method), which at the same time reduces the thrust force on the rotor. Two main parameters are the proportional and integral gains of the PI controller. Thus, with tuning the controller parameters, different optimization goals can be pursued:
- -
- Controller optimization for load reduction:The goal is to reduce oscillations in the sensor generator speed and to achieve as early as possible a steady state. This implies at the same time also reduced oscillations and an earlier steady state in the power output, blade pitch angle, and the loads on the turbine.
- -
- Controller adaption for floating systems:Wind turbine controllers measure the wind speed in certain intervals. In case of a floating system, the measured speed is not undisturbed but the resulting wind speed due to wind inflow and motion of the floating system. A common onshore or bottom-fixed offshore wind turbine controller is much faster than the floating platform motions. This means that the time intervals for taking measurements are so small, that the controller would perceive a decreasing wind speed (corresponding to a decreasing rotor thrust) if the floating system moves with the wind. The reaction of the controller would then be to pitch the blades into the wind to avoid a reduction of the power output. This, however, will increase the thrust force and the system will continue moving backwards. This negative damping effect, which would be introduced when using a common onshore-type wind turbine controller for a floating offshore system, therefore leads to an unstable system behavior. For this reason, the controller parameters would have to be adjusted. Thus, the optimization goal in this case is to tune the controller in order to obtain a stable floating system, with a controller frequency lower than the smallest eigenfrequency of the floating wind turbine system. This tuning can be done through running iterative simulations within an optimization algorithm [69].
- Considering an entire wind farm, the framework tool can also be applied to optimize the wind farm layout with regard to the space utilized and power extracted, as already outlined in Section 1. Another option for maximizing the power output of the entire wind farm—having a fixed layout—is to adjust the control and operational management of the single wind turbines by, for instance, changing the yaw angle of the first rows’ turbines to influence the wake direction and the flow condition reaching the turbines behind.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALPSO | Augmented Lagrangian PSO |
| BFGS | Broyden-Fletcher-Goldfarb-Shanno |
| CMAES | Covariance Matrix Adaptation Evolution Strategy |
| COBYLA | Constrained Optimization BY Linear Approximation |
| CONMIN | CONstrained function Minimization |
| DLC | Design Load Case |
| Dymola® | Dynamic modeling laboratory |
| EA | Evolutionary Algorithm |
| EpsMOEA | Steady-state Epsilon-MOEA |
| FAST | Fatigue, Aerodynamics, Structures, and Turbulence |
| FSQP | Feasible SQP |
| GA | Genetic Algorithm |
| GDE3 | Generalized Differential Evolution 3 |
| HAWC2 | Horizontal Axis Wind turbine simulation Code 2nd generation |
| IBEA | Indicator-Based EA |
| IEC | International Electrotechnical Commission |
| IPOPT | Interior Point OPTimizer |
| IWES | Institute for Wind Energy Systems |
| L-BFGS-B | Limited-memory BFGS with Box constraints |
| MO | Multi-Objective |
| MOEAD | MO EA based on Decomposition |
| MoWiT | Modelica® library for Wind Turbines |
| Newton-CG | Newton Conjugate Gradient |
| NOMAD | Non-linear Optimization by Mesh Adaptive Direct search |
| NREL | National Renewable Energy Laboratory |
| NSGAII | Non-dominated Sorting GA II |
| NSGAIII | Non-dominated Sorting GA III |
| OC3 | Offshore Code Comparison Collaboration |
| OMOPSO | Our multi-objective PSO |
| OpenMDAO | Open-source Multi-disciplinary Design, Analysis, and Optimization |
| PEAS | Parallel EAs |
| PESA2 | Pareto Envelope-based Selection Algorithm |
| PSO | Particle Swarm Optimization |
| PSQP | Preconditioned SQP |
| SLSQP | Sequential Least Squares Quadratic Programming |
| SMPSO | Speed-constrained multi-objective PSO |
| SNOPT | Sparse Nonlinear OPTimizer |
| SPEA2 | Strength Pareto EA 2 |
| SQP | Sequential Quadratic Programming |
| TNC | Truncated Newton |
References
- International Electrotechnical Commission. Wind Energy Generation Systems—Part 3-2: Design Requirements for Floating Offshore Wind Turbines: Technical Specification IEC TS 61400-3-2; International Electrotechnical Commission: Geneva, Switzerland, 2019. [Google Scholar]
- International Electrotechnical Commission. Wind Energy Generation Systems—Part 3-1: Design Requirements for Fixed Offshore Wind Turbines: International Standard IEC 61400-3-1; International Electrotechnical Commission: Geneva, Switzerland, 2019. [Google Scholar]
- DNV GL AS. Loads and Site Conditions for Wind Turbines: Standard DNVGL-ST-0437; DNV GL AS: Oslo, Norway, 2016. [Google Scholar]
- Baños, R.; Manzano-Agugliaro, F.; Montoya, F.G.; Gil, C.; Alcayde, A.; Gómez, J. Optimization methods applied to renewable and sustainable energy: A review. Renew. Sust. Energ Rev. 2011, 15, 1753–1766. [Google Scholar] [CrossRef]
- Momoh, J.A.; Surender Reddy, S. Review of optimization techniques for Renewable Energy Resources. In Proceedings of the PEMWA 2014, Milwaukee, WI, USA, 24–26 July 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Härer, A. Optimierung von Windenergieanlagen-Komponenten in Mehrkörpersimulationen zur Kosten- und Lastreduktion. Master’s Thesis, Stiftungslehrstuhl Windenergie Universität, Stuttgart, Germany, 2013. [Google Scholar]
- Mytilinou, V.; Kolios, A.J. A multi-objective optimisation approach applied to offshore wind farm location selection. J. Ocean Eng. Mar. Energy 2017, 3, 265–284. [Google Scholar] [CrossRef] [Green Version]
- Mytilinou, V.; Lozano-Minguez, E.; Kolios, A. A Framework for the Selection of Optimum Offshore Wind Farm Locations for Deployment. Energies 2018, 11, 1855. [Google Scholar] [CrossRef] [Green Version]
- Mytilinou, V.; Kolios, A.J. Techno-economic optimisation of offshore wind farms based on life cycle cost analysis on the UK. Renew. Energy 2019, 132, 439–454. [Google Scholar] [CrossRef]
- Muskulus, M.; Schafhirt, S. Design Optimization of Wind Turbine Support Structures—A Review. J. Ocean. Wind. Energy 2014, 1, 12–22. [Google Scholar]
- Lemmer, F.; Müller, K.; Yu, W.; Schlipf, D.; Cheng, P.W. Optimization of Floating Offshore Wind Turbine Platforms with a Self-Tuning Controller. In Proceedings of the OMAE 2017, Trondheim, Norway, 25–30 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Sandner, F.; Schlipf, D.; Matha, D.; Cheng, P.W. Integrated Optimization of Floating Wind Turbine Systems. In Proceedings of the OMAE 2014, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Kolios, A.; Luengo, M.M.; Liu, X. Structural optimisation of wind turbine towers based on finite element analysis and genetic algorithm. Wind Energy Sci. Discuss. 2016, 1–26. [Google Scholar] [CrossRef]
- Fylling, I.; Berthelsen, P.A. WINDOPT: An Optimization Tool for Floating Support Structures for Deep Water Wind Turbines. In Proceedings of the OMAE 2011, Rotterdam, The Netherlands, 19–24 June 2011; pp. 767–776. [Google Scholar] [CrossRef]
- Ashuri, T.; Zaaijer, M.B.; Martins, J.; van Bussel, G.; van Kuik, G. Multidisciplinary design optimization of offshore wind turbines for minimum levelized cost of energy. Renew. Energy 2014, 68, 893–905. [Google Scholar] [CrossRef] [Green Version]
- Hou, P.; Zhu, J.; Ma, K.; Yang, G.; Hu, W.; Chen, Z. A review of offshore wind farm layout optimization and electrical system design methods. J. Mod. Power Syst. Clean Energy 2019, 7, 975–986. [Google Scholar] [CrossRef] [Green Version]
- Herbert-Acero, J.; Probst, O.; Réthoré, P.E.; Larsen, G.; Castillo-Villar, K. A Review of Methodological Approaches for the Design and Optimization of Wind Farms. Energies 2014, 7, 6930–7016. [Google Scholar] [CrossRef]
- Valverde, P.S.; Sarmento, A.J.N.A.; Alves, M. Offshore Wind Farm Layout Optimization - State of the Art. J. Ocean. Wind. Energy 2014, 1, 23–29. [Google Scholar]
- Bottasso, C.L.; Bortolotti, P.; Croce, A.; Gualdoni, F. Integrated aero-structural optimization of wind turbines. Multibody Syst. Dyn. 2016, 38, 317–344. [Google Scholar] [CrossRef] [Green Version]
- Bottasso, C.L.; Campagnolo, F.; Croce, A. Multi-disciplinary constrained optimization of wind turbines. Multibody Syst. Dyn. 2012, 27, 21–53. [Google Scholar] [CrossRef]
- Shen, X.; Chen, J.G.; Zhu, X.C.; Liu, P.Y.; Du, Z.H. Multi-objective optimization of wind turbine blades using lifting surface method. Energy 2015, 90, 1111–1121. [Google Scholar] [CrossRef] [Green Version]
- Mo, Q.Y.; Deng, F.; Li, S.S.; Zhang, K.Y. Multidisciplinary Design Optimization for Small Vertical Wind Turbine Design. Appl. Mech. Mater. 2014, 571–572, 1083–1086. [Google Scholar] [CrossRef]
- Bortolotti, P.; Sartori, L.; Croce, A.; Bottasso, C.L. Multi-MW wind turbine CoE reduction via a multi- disciplinary design process. In Proceedings of the EWEA 2015, Paris, France, 17–20 November 2015. [Google Scholar]
- Deshmukh, A.P.; Allison, J.T. Multidisciplinary dynamic optimization of horizontal axis wind turbine design. Struct. Multidiscip. Optim. 2016, 53, 15–27. [Google Scholar] [CrossRef]
- Chew, K.H.; Tai, K.; Ng, E.; Muskulus, M. Analytical gradient-based optimization of offshore wind turbine substructures under fatigue and extreme loads. Mar. Struct. 2016, 47, 23–41. [Google Scholar] [CrossRef] [Green Version]
- Pavese, C.; Tibaldi, C.; Zahle, F.; Kim, T. Aeroelastic multidisciplinary design optimization of a swept wind turbine blade. Wind Energy 2017, 20, 1941–1953. [Google Scholar] [CrossRef]
- Clauss, G.F.; Birk, L. Hydrodynamic shape optimization of large offshore structures. Appl. Ocean Res. 1996, 18, 157–171. [Google Scholar] [CrossRef]
- Bottasso, C.L.; Campagnolo, F.; Croce, A. Multi-disciplinary constrained optimization of wind turbines. In Proceedings of the EWEC 2010, Warsaw, Poland, 20–23 April 2010; pp. 2241–2250. [Google Scholar]
- Jureczko, M.; Mężyk, A. Multidisciplinary optimization of wind turbine blades. In Proceedings of the EACWE 2005, Prague, Czech Republic, 11–15 July 2005; pp. 162–163. [Google Scholar]
- Lemmer, F.; Müller, K.; Yu, W.; Guzman, R.F.; Kretschmer, M. Qualification of Innovative Floating Substructures for 10 MW Wind Turbines and Water Depths Greater than 50 m: Deliverable D4.3 Optimization Framework and Methodology for Optimized Floater Design. 2016. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5af3aacba&appId=PPGMS (accessed on 12 February 2021).
- Leimeister, M. Python-Modelica Framework for Automated Simulation and Optimization. In Proceedings of the 13th International Modelica Conference, Regensburg, Germany, 4–6 March 2019; Linköping University Electronic Press: Linköping, Sweden, 2019; pp. 51–58. [Google Scholar] [CrossRef] [Green Version]
- DNV GL. Bladed User Manual: Version 4.8; DNV GL: Oslo, Norway, 2016. [Google Scholar]
- Jonkman, J.; Buhl, M. FAST User’s Guide; Technical Report NREL/EL-500-38230; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Larsen, T.J.; Hansen, A.M. How 2 HAWC2, the User’s Manual; Risø-R-Report Risø-R-1597; Risø National Laboratory: Roskilde, Denmark, 2015. [Google Scholar]
- Leimeister, M.; Thomas, P. The OneWind Modelica Library for Floating Offshore Wind Turbine Simulations with Flexible Structures. In Proceedings of the 12th International Modelica Conference, Prague, Czech Republic, 15–17 May 2017; Linköping University Electronic Press: Linköping, Sweden, 2017; pp. 633–642. [Google Scholar] [CrossRef] [Green Version]
- Thomas, P.; Gu, X.; Samlaus, R.; Hillmann, C.; Wihlfahrt, U. The OneWind Modelica Library for Wind Turbine Simulation with Flexible Structure—Modal Reduction Method in Modelica. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; Linköping University Electronic Press: Linköping, Sweden, 2014; pp. 939–948. [Google Scholar] [CrossRef] [Green Version]
- Strobel, M.; Vorpahl, F.; Hillmann, C.; Gu, X.; Zuga, A.; Wihlfahrt, U. The OnWind Modelica Library for Offshore Wind Turbines—Implementation and First Results. In Proceedings of the 8th International Modelica Conference, Dresden, Germany, 20–22 March 2011; Linköping University Electronic Press: Linköping, Sweden, 2011; pp. 603–609. [Google Scholar] [CrossRef] [Green Version]
- Popko, W.; Robertson, A.; Jonkman, J.; Wendt, F.; Thomas, P.; Müller, K.; Kretschmer, M.; Hagen, T.R.; Galinos, C.; Le Dreff, J.B.; et al. Validation of Numerical Models of the Offshore Wind Turbine From the Alpha Ventus Wind Farm Against Full-Scale Measurements Within OC5 Phase III. J. Offshore Mech. Arct. Eng. 2021, 143, 82. [Google Scholar] [CrossRef]
- Robertson, A.N.; Gueydon, S.; Bachynski, E.; Wang, L.; Jonkman, J.; Alarcón, D.; Amet, E.; Beardsell, A.; Bonnet, P.; Boudet, B.; et al. OC6 Phase I: Investigating the underprediction of low-frequency hydrodynamic loads and responses of a floating wind turbine. J. Phys. Conf. Ser. 2020, 1618, 032033. [Google Scholar] [CrossRef]
- Leimeister, M.; Kolios, A.; Collu, M. Development and Verification of an Aero-Hydro-Servo-Elastic Coupled Model of Dynamics for FOWT, Based on the MoWiT Library. Energies 2020, 13, 1974. [Google Scholar] [CrossRef]
- Popko, W.; Huhn, M.L.; Robertson, A.; Jonkman, J.; Wendt, F.; Müller, K.; Kretschmer, M.; Vorpahl, F.; Hagen, T.R.; Galinos, C.; et al. Verification of a Numerical Model of the Offshore Wind Turbine from the Alpha Ventus Wind Farm within OC5 Phase III. In Proceedings of the OMAE 2018, Madrid, Spain, 17–22 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Leimeister, M.; Kolios, A.; Collu, M.; Thomas, P. Design optimization of the OC3 phase IV floating spar-buoy, based on global limit states. Ocean Eng. 2020, 202. [Google Scholar] [CrossRef]
- Dassault Systèmes. Dymola: Dynamic Modeling Laboratory: User Manual Volume 1; Dassault Systèmes: Royal Velizy, France, 2015. [Google Scholar]
- Dassault Systèmes. Dymola: Dynamic Modeling Laboratory: User Manual Volume 2; Dassault Systèmes: Royal Velizy, France, 2015. [Google Scholar]
- McKinney, W. Python for Data Analysis; O’Reilly: Sebastopol, CA, USA, 2013. [Google Scholar]
- Jonkman, B.J. TurbSim User’s Guide, Version 1.50; Technical Report NREL/TP-500-46198; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- International Electrotechnical Commission. Wind Turbines—Part 1: Design Requirements; International standard IEC 61400-1; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- DNV GL AS. Floating Wind Turbine Structures: Standard DNVGL-ST-0119; DNV GL AS: Oslo, Norway, 2018. [Google Scholar]
- Det Norske Veritas AS. Design of Offshore Wind Turbine Structures: Offshore Standard DNV-OS-J101; DNV GL AS: Oslo, Norway, 2014. [Google Scholar]
- Stieng, L.E.S.; Muskulus, M. Load case reduction for offshore wind turbine support structure fatigue assessment by importance sampling with two–stage filtering. Wind Energy 2019, 22, 1472–1486. [Google Scholar] [CrossRef] [Green Version]
- Krieger, A.; Ramachandran, G.K.V.; Vita, L.; Alonso, P.G.; Almería, G.G.; Berque, J.; Aguirre, G. Qualification of Innovative Floating Substructures for 10 MW Wind Turbines and Water Depths Greater than 50 m: Deliverable D7.2 Design Basis. 2015. Available online: http://lifes50plus.eu/wp-content/uploads/2015/11/D72_Design_Basis_Retyped-v1.1.pdf (accessed on 12 February 2021).
- Matha, D.; Sandner, F.; Schlipf, D. Efficient critical design load case identification for floating offshore wind turbines with a reduced nonlinear model. J. Phys. Conf. Ser. 2014, 555. [Google Scholar] [CrossRef] [Green Version]
- Bachynski, E.E.; Etemaddar, M.; Kvittem, M.I.; Luan, C.; Moan, T. Dynamic Analysis of Floating Wind Turbines During Pitch Actuator Fault, Grid Loss, and Shutdown. Energy Proc. 2013, 35, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Hayman, G.; Buhl, M. MLife User’s Guide for Version 1.00: Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2012. [Google Scholar]
- Hayman, G. MLife Theory Manual for Version 1.00: Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2012. [Google Scholar]
- Gosavi, A. Simulation-Based Optimization: Parametric Optimization Techniques and Reinforcement Learning, 2nd ed.; Springer: Boston, MA, USA, 2015. [Google Scholar]
- openmdao.org. Optimizer. 2016. Available online: http://openmdao.org/twodocs/versions/latest/tags/Optimizer.html#optimizer (accessed on 12 February 2021).
- Hadka, D. Platypus Documentation, Release. 2015. Available online: https://platypus.readthedocs.io/en/latest/ (accessed on 12 February 2021).
- Izzo, D.; Biscani, F. Welcome to PyGMO. 2015. Available online: https://esa.github.io/pygmo/index.html (accessed on 12 February 2021).
- Mishra, S.; Sahoo, S.; Das, M. Genetic Algorithm: An Efficient Tool for Global Optimization. Adv. Comput. Sci. Technol. 2017, 10, 2201–2211. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Leimeister, M.; Kolios, A.; Collu, M. Critical review of floating support structures for offshore wind farm deployment. J. Phys. Conf. Ser. 2018, 1104. [Google Scholar] [CrossRef]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; Technical Report NREL/TP-500-47535; National Renewable Energy Laboratory: Golden, CO, USA, 2010. [Google Scholar]
- Huijs, F.; Mikx, J.; Savenije, F.; de Ridder, E.J. Integrated design of floater, mooring and control system for a semi-submersible floating wind turbine. In Proceedings of the EWEA Offshore 2013, Frankfurt, Germany, 19–21 November 2013. [Google Scholar]
- Kolios, A.; Borg, M.; Hanak, D. Reliability analysis of complex limit states of floating wind turbines. JECM 2015, 2, 6–9. [Google Scholar]
- Katsouris, G.; Marina, A. Cost Modelling of Floating Wind Farms; ECN-E-15-078; ECN: Petten, The Netherlands, 2016. [Google Scholar]
- Nejad, A.R.; Bachynski, E.E.; Moan, T. On Tower Top Axial Acceleration and Drivetrain Responses in a Spar-Type Floating Wind Turbine. In Proceedings of the OMAE 2017, Trondheim, Norway, 25–30 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K.; Yamaguchi, H.; Akase, M.; Imakita, A.; Ishihara, T.; Fukumoto, Y.; Oyama, T. Initial Design of Tension Leg Platform for Offshore Wind Farm. J. Fluid Sci. Technol. 2011, 6, 372–381. [Google Scholar] [CrossRef] [Green Version]
- Larsen, T.J.; Hanson, T.D. A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine. J. Phys. Conf. Ser. 2007, 75. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Optimizer | Meaning | Gradient- | MO |
|---|---|---|---|---|
| Quasi-Newton method | Newton-CG | Newton Conjugate Gradient | based | |
| TNC | Truncated Newton | based | ||
| Powell | based | |||
| BFGS | Broyden-Fletcher-Goldfarb-Shanno | based | ||
| L-BFGS-B | Limited-memory BFGS with Box constraints | based | ||
| SQP | FSQP | Feasible SQP | based | |
| PSQP | Preconditioned SQP | based | ||
| SLSQP | Sequential Least Squares Quadratic Programming | based | ||
| EA | GA | Genetic Algorithm | free | x |
| NSGAII | Non-dominated Sorting GA II | free | x | |
| NSGAIII | Non-dominated Sorting GA III | free | x | |
| EpsMOEA | Steady-state Epsilon-MO EA | free | x | |
| MOEAD | MO EA based on Decomposition | free | x | |
| GDE3 | Generalized Differential Evolution 3 | free | x | |
| SPEA2 | Strength Pareto EA 2 | free | x | |
| IBEA | Indicator-Based EA | free | x | |
| PEAS | Parallel EAs | free | x | |
| PESA2 | Pareto Envelope-based Selection Algorithm | free | x | |
| CMAES | Covariance Matrix Adaptation Evolution Strategy | free | ||
| PSO | ALPSO | Augmented Lagrangian PSO | free | |
| OMOPSO | Our multi-objective PSO | free | x | |
| SMPSO | Speed-constrained multi-objective PSO | free | x | |
| Others | NOMAD | Non-linear Optimization by Mesh Adaptive Direct search | free | x |
| SNOPT | Sparse Nonlinear OPTimizer | based | ||
| CONMIN | CONstrained function Minimization | based | ||
| IPOPT | Interior Point OPTimizer | based | ||
| Nelder-Mead | free | |||
| COBYLA | Constrained Optimization BY Linear Approximation | free |
| Type | Parameter | Constraint |
|---|---|---|
| Design variables | D | between 6.5 m and 10.0 m |
| H | between 68.0 m and 108.0 m | |
| between 1281.0 kg/m3 and 2600.0 kg/m3 | ||
| Objectives | Inclination | target 10° subject to ≤10° |
| Acceleration | target 1.962 m/s2 subject to ≤1.962 m/s2 | |
| Translation | minimize |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leimeister, M.; Kolios, A.; Collu, M. Development of a Framework for Wind Turbine Design and Optimization. Modelling 2021, 2, 105-128. https://doi.org/10.3390/modelling2010006
Leimeister M, Kolios A, Collu M. Development of a Framework for Wind Turbine Design and Optimization. Modelling. 2021; 2(1):105-128. https://doi.org/10.3390/modelling2010006
Chicago/Turabian StyleLeimeister, Mareike, Athanasios Kolios, and Maurizio Collu. 2021. "Development of a Framework for Wind Turbine Design and Optimization" Modelling 2, no. 1: 105-128. https://doi.org/10.3390/modelling2010006
APA StyleLeimeister, M., Kolios, A., & Collu, M. (2021). Development of a Framework for Wind Turbine Design and Optimization. Modelling, 2(1), 105-128. https://doi.org/10.3390/modelling2010006