
Customized Orthosis Design Based on Surface Reconstruction from 3D-Scanned Points

 , and
, and
Abstract
1. Introduction
2. Literature Review
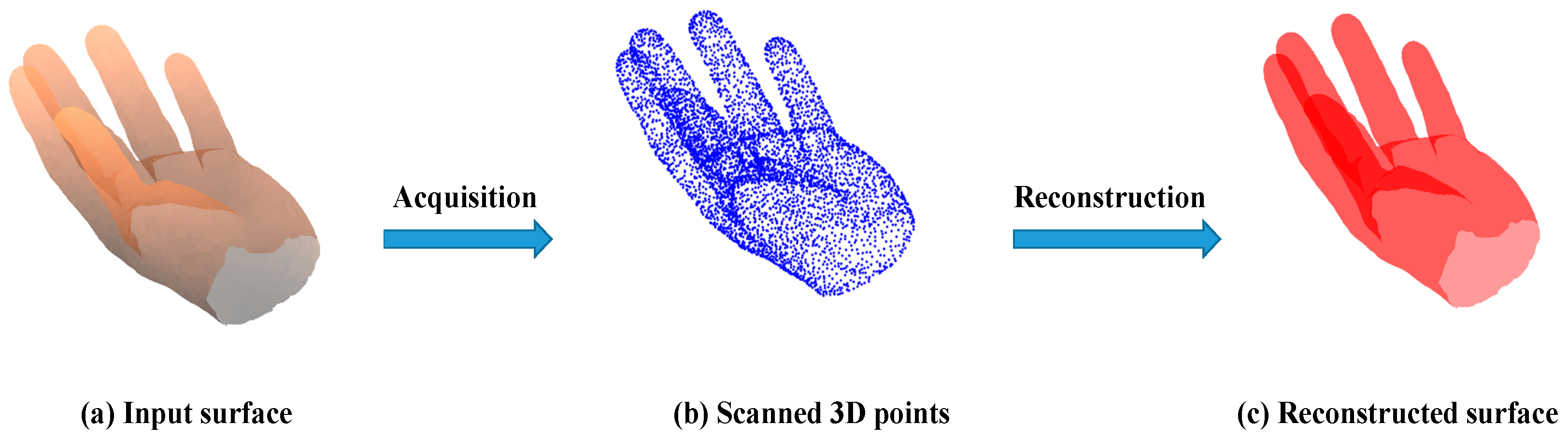
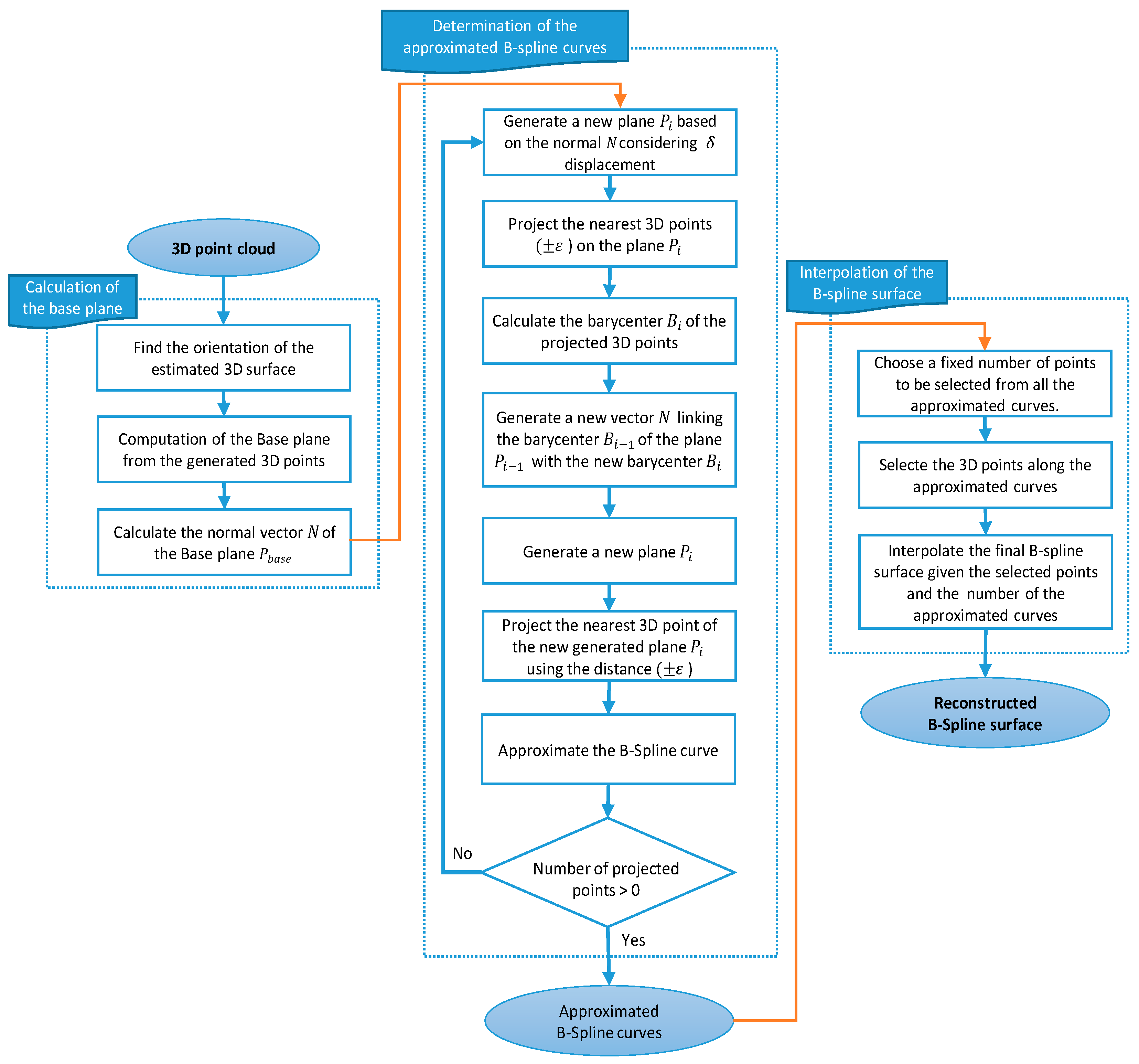
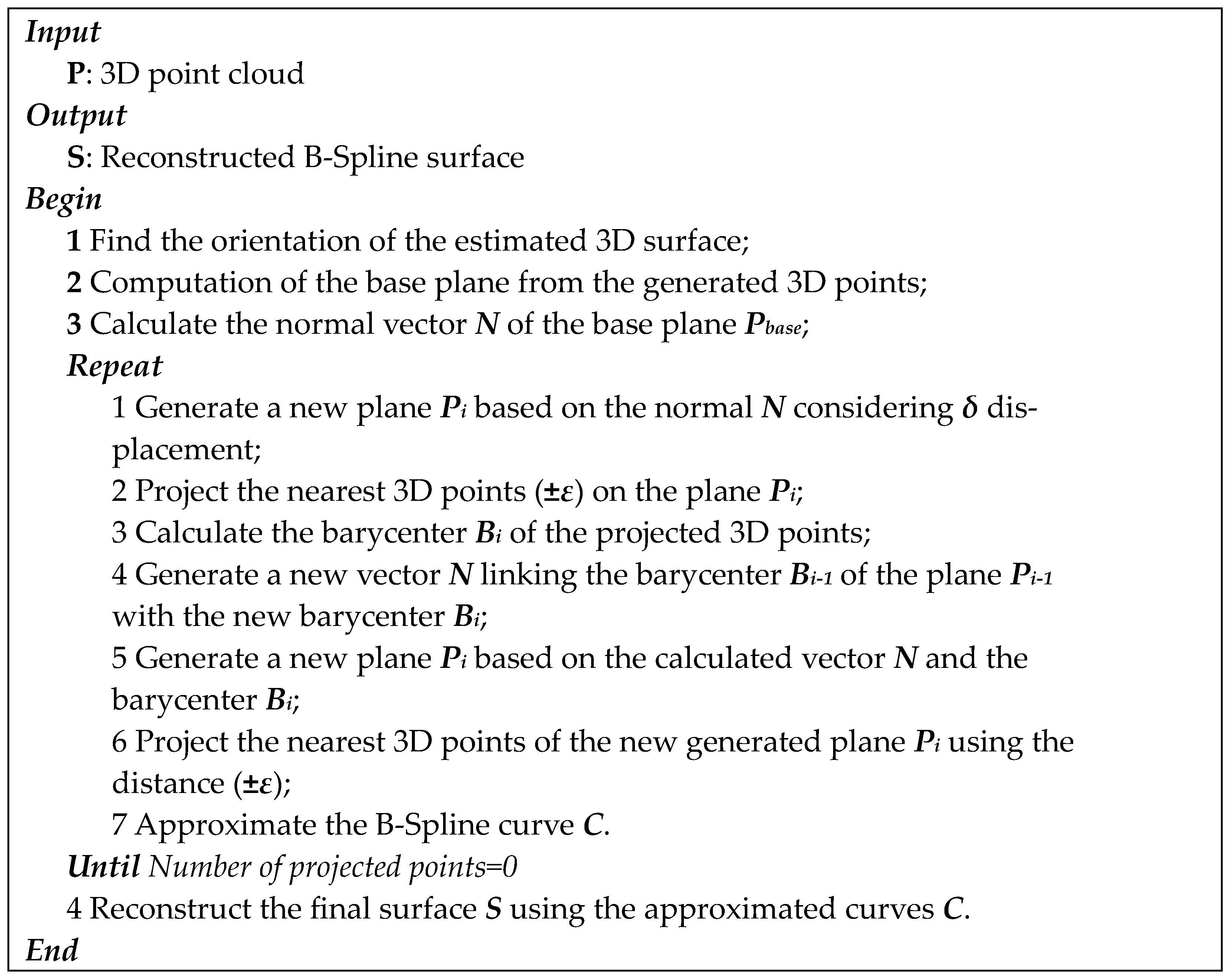
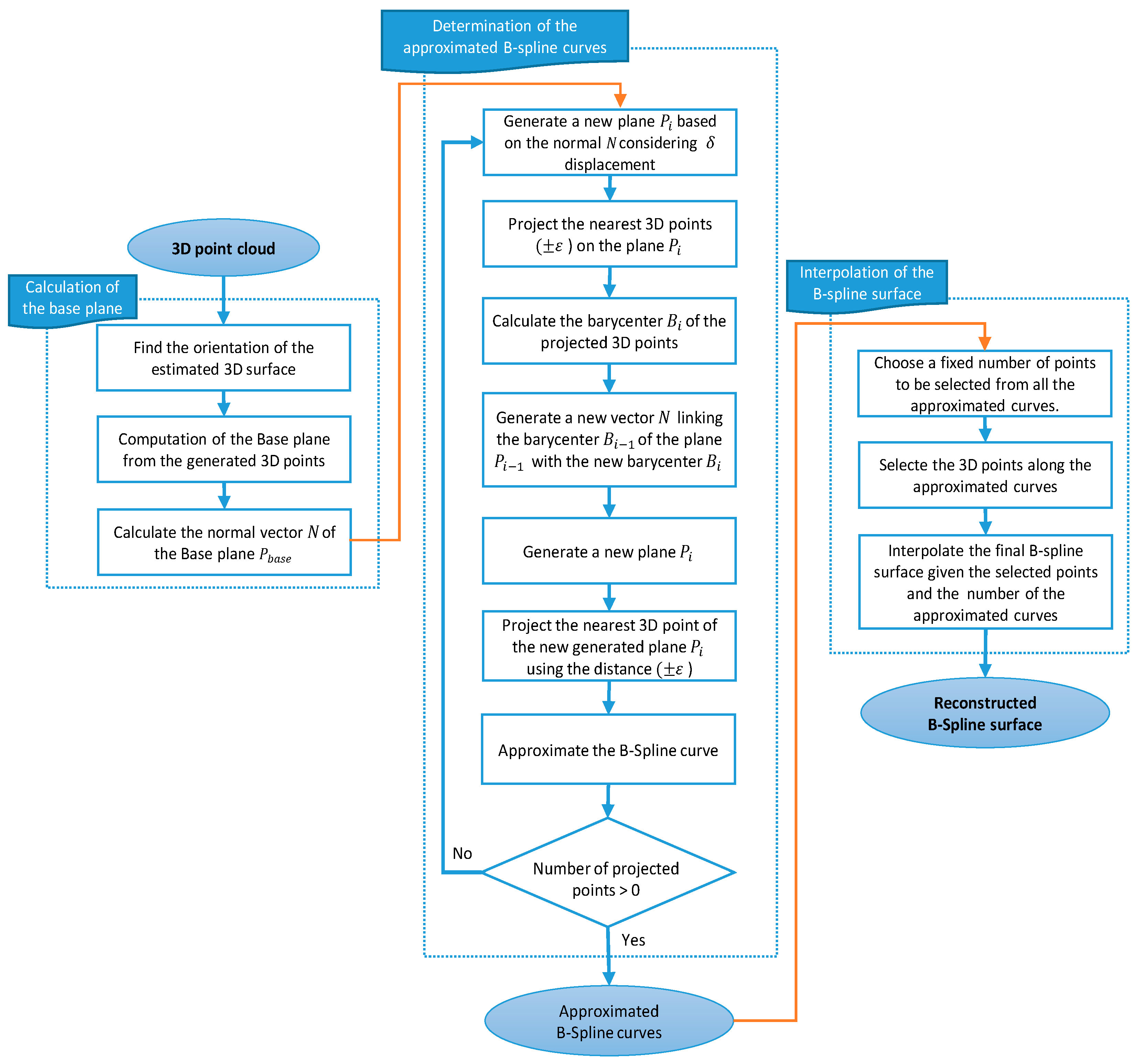
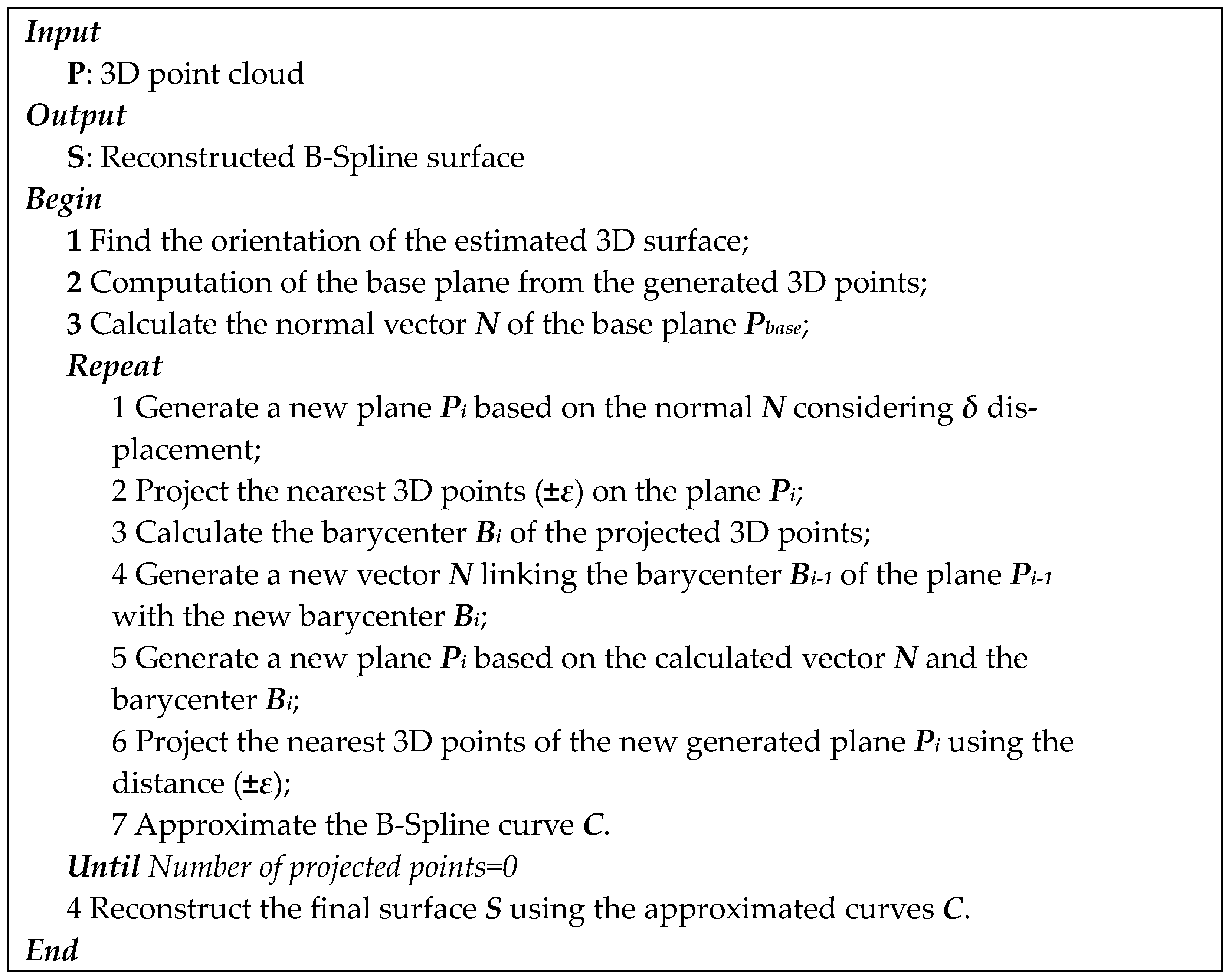
3. Proposed Methodology
3.1. Calculation of the Base Plane
- Determination of the orientation of the estimated 3D surface
- Determination of the base plane
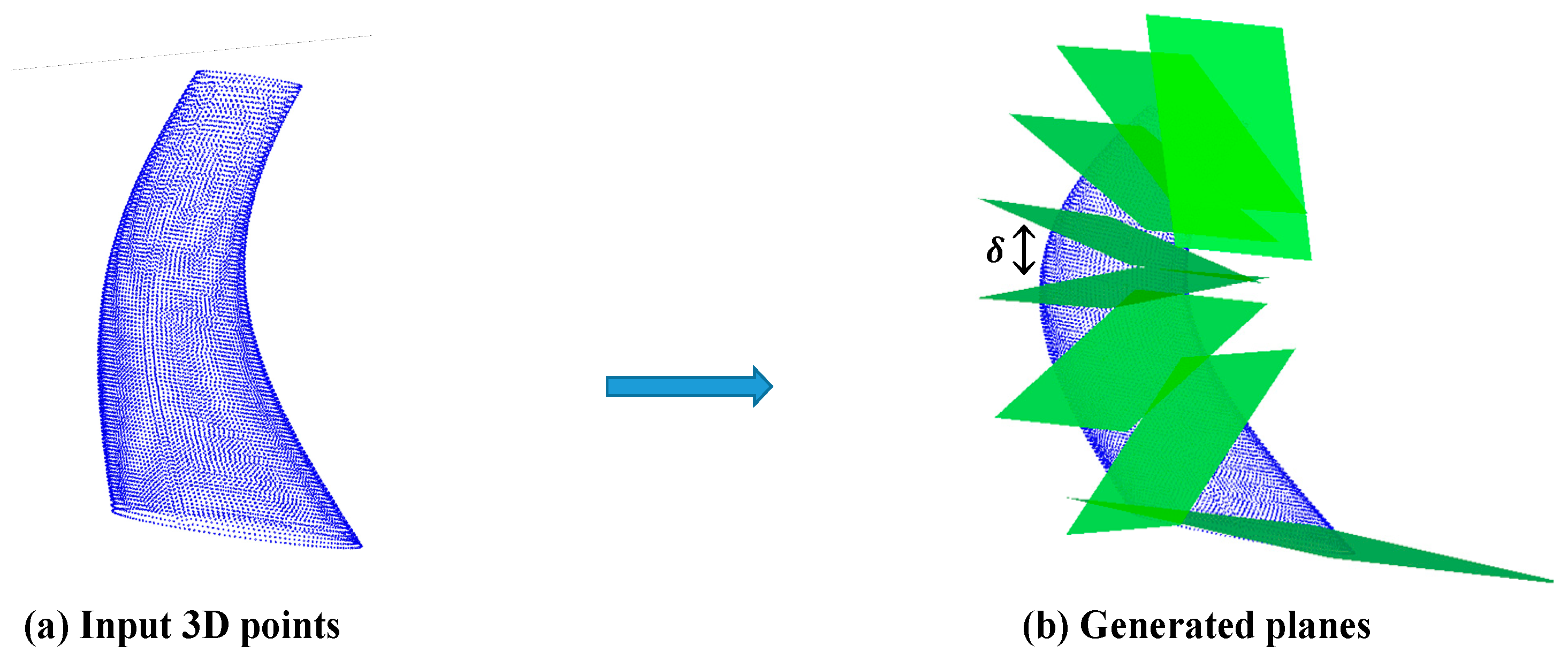
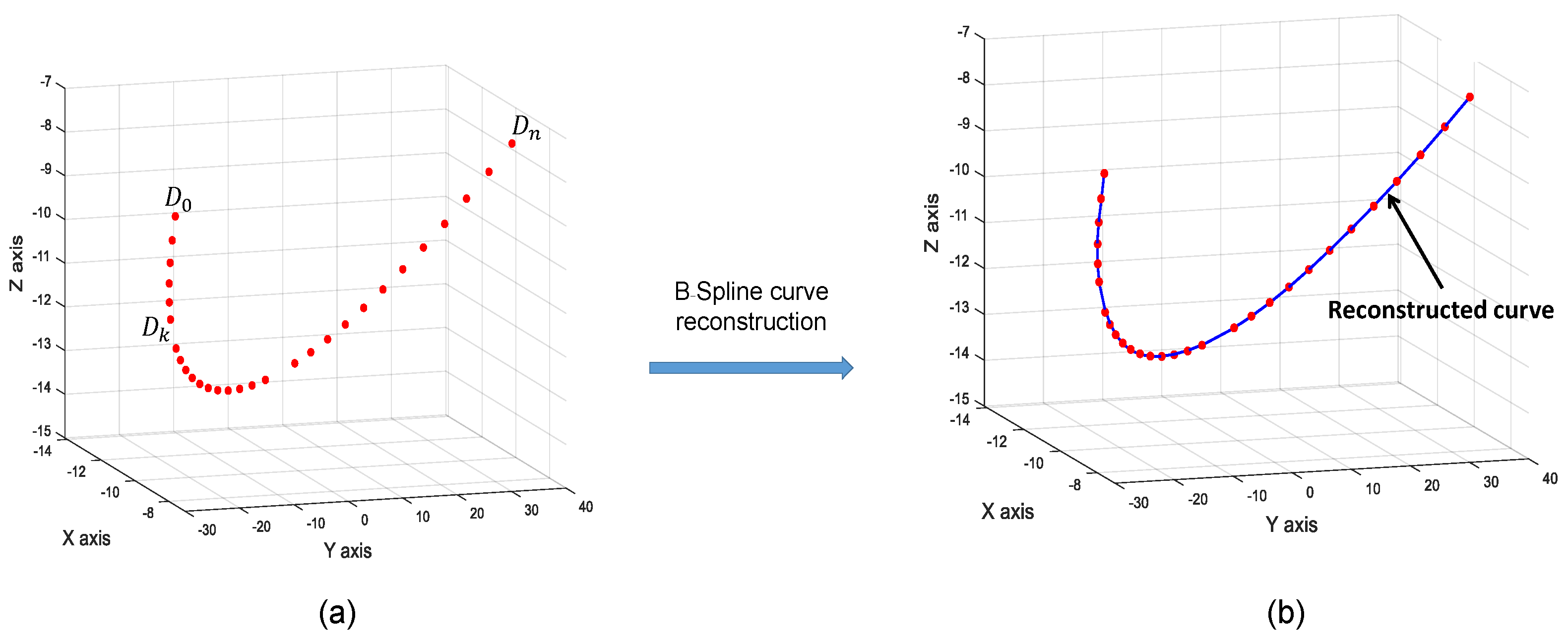
3.2. Determination of the Approximated B-Spline Curves
- B-Spline curve approximation
3.3. Interpolation of the B-Spline Surface
- Choose a fixed number of points to be selected from all the reconstructed curves.
- Generate a perpendicular plane to the base plane.
- Given the barycenter of each approximated curve, the plane is rotated using a calculated angle based on the number of selected points.
- The selected points on each curve are obtained by the intersection of the rotated plane with the corresponding B-Spline curve.
- Interpolate the final B-Spline surface given all the selected points and the number of approximated curves.
4. Experimental Results on Quality Assessment
5. Surface Reconstruction Results
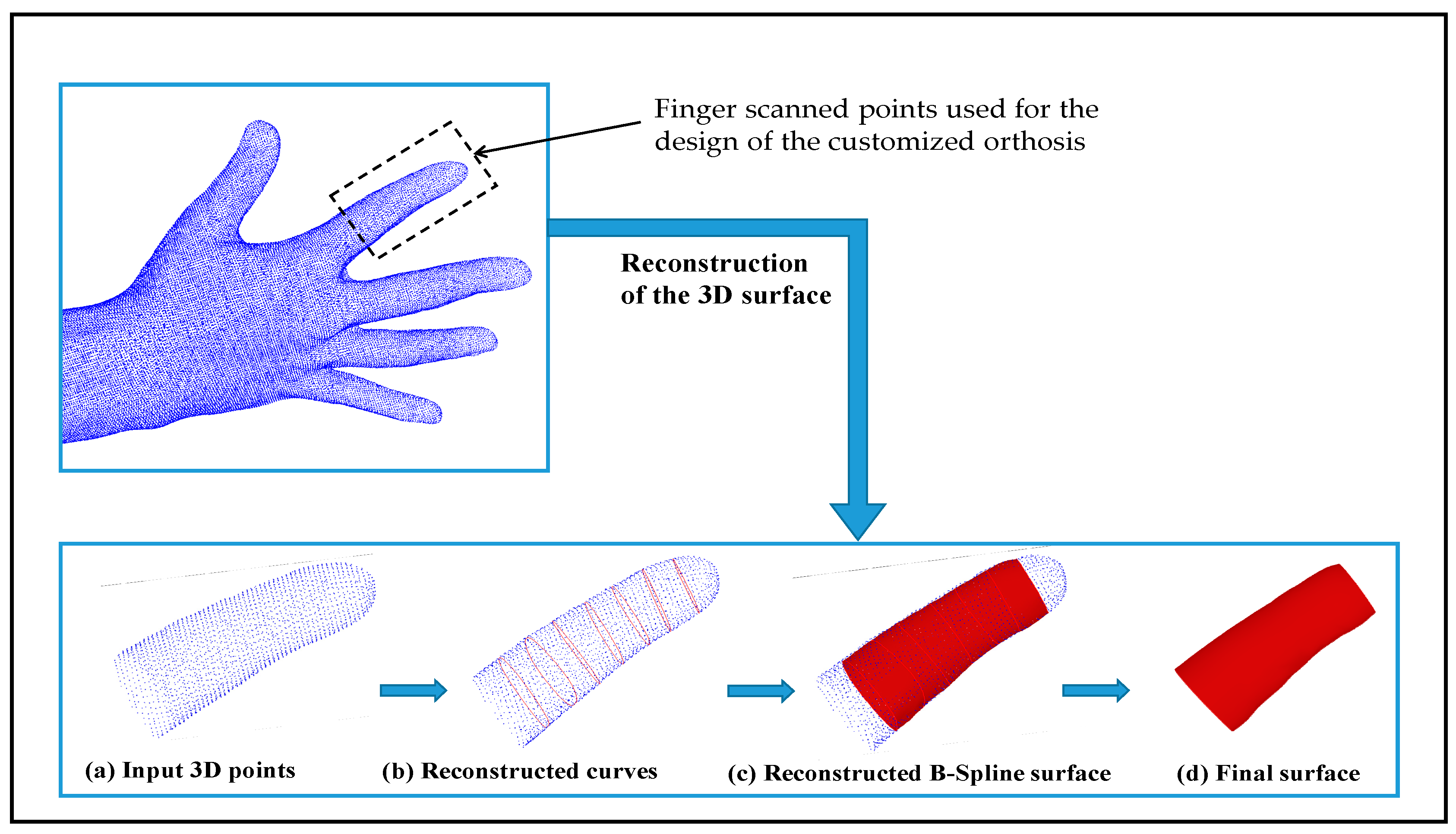
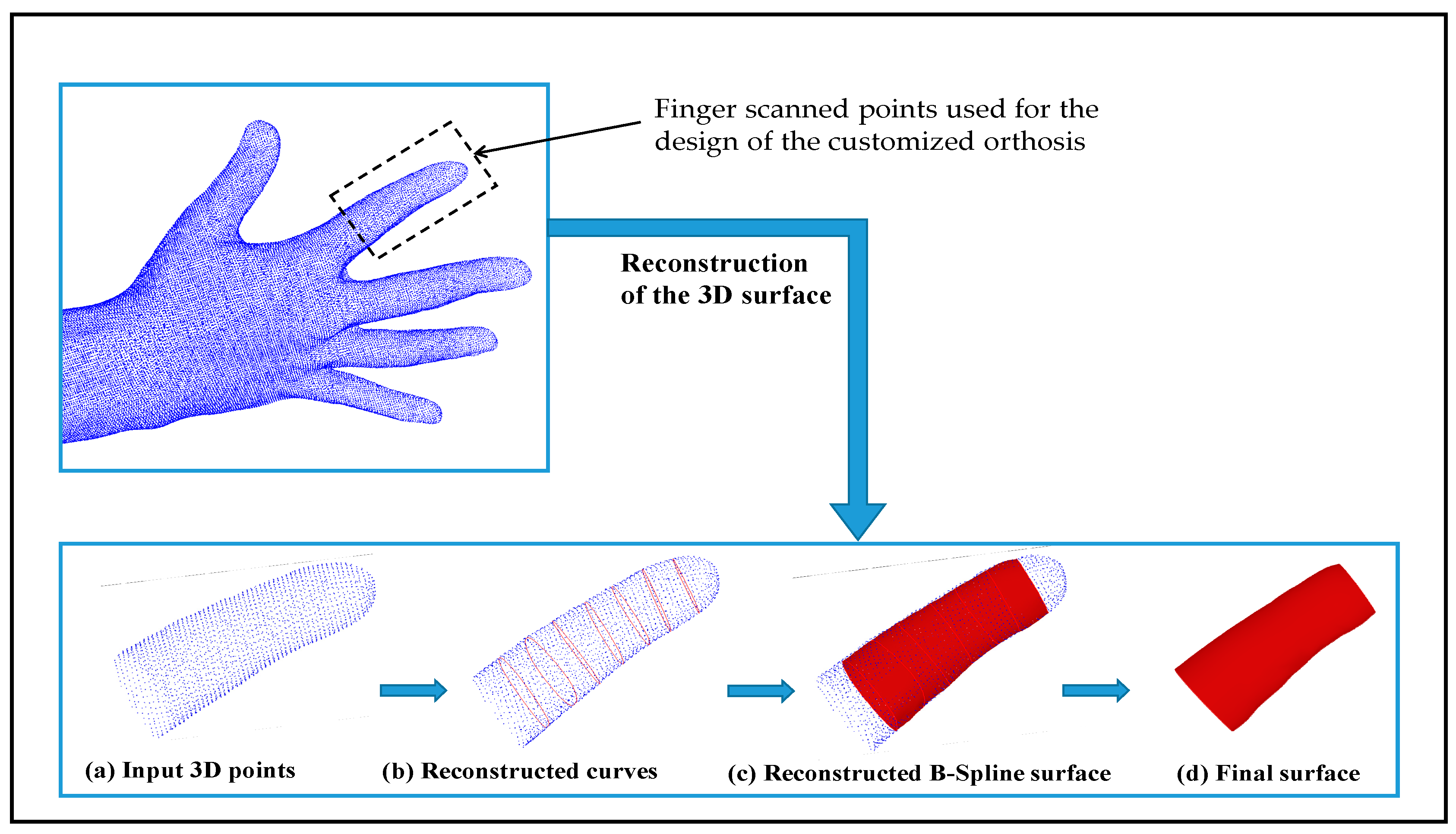
5.1. Surface Reconstruction for Customized Finger Orthosis Design
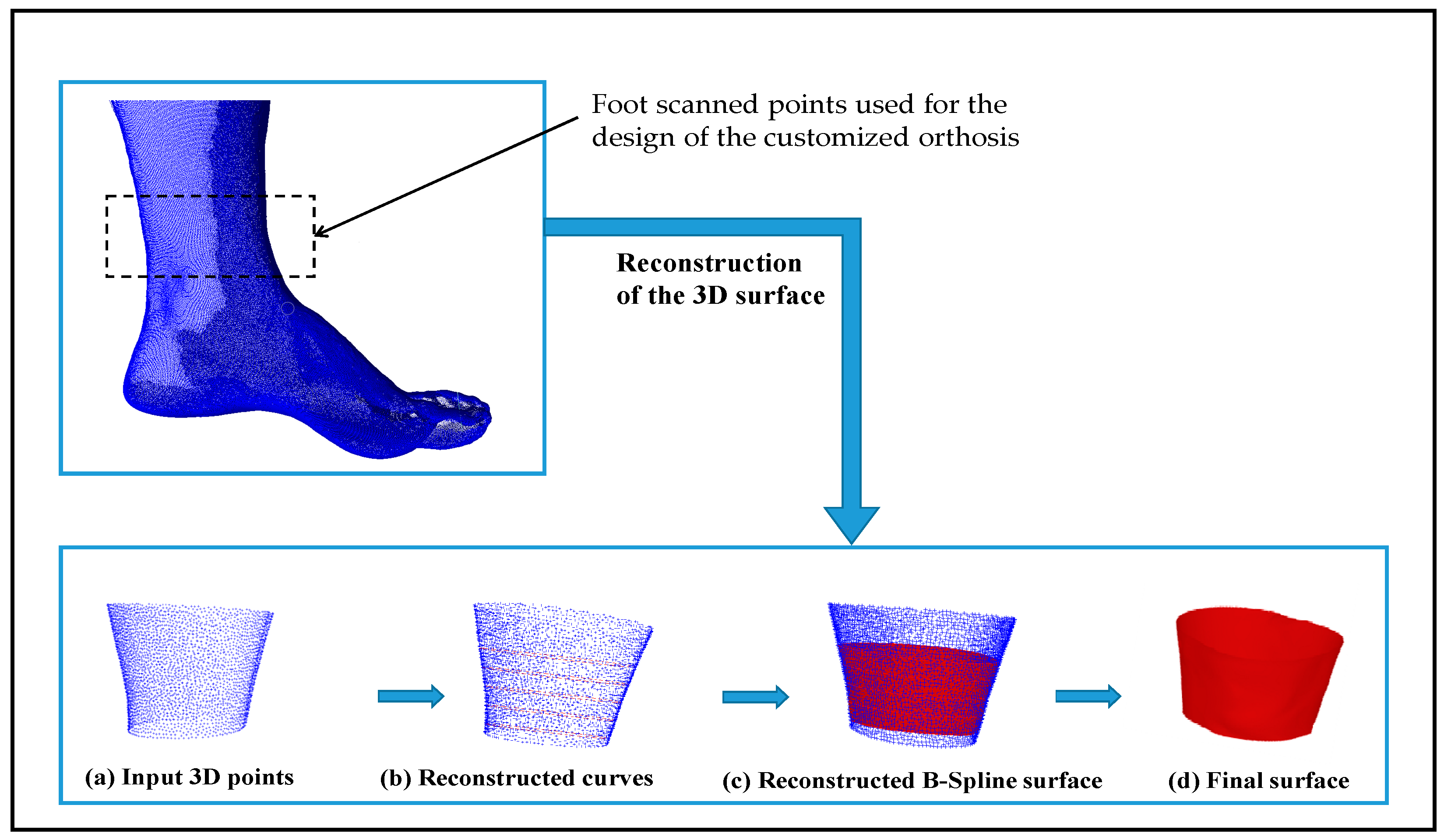
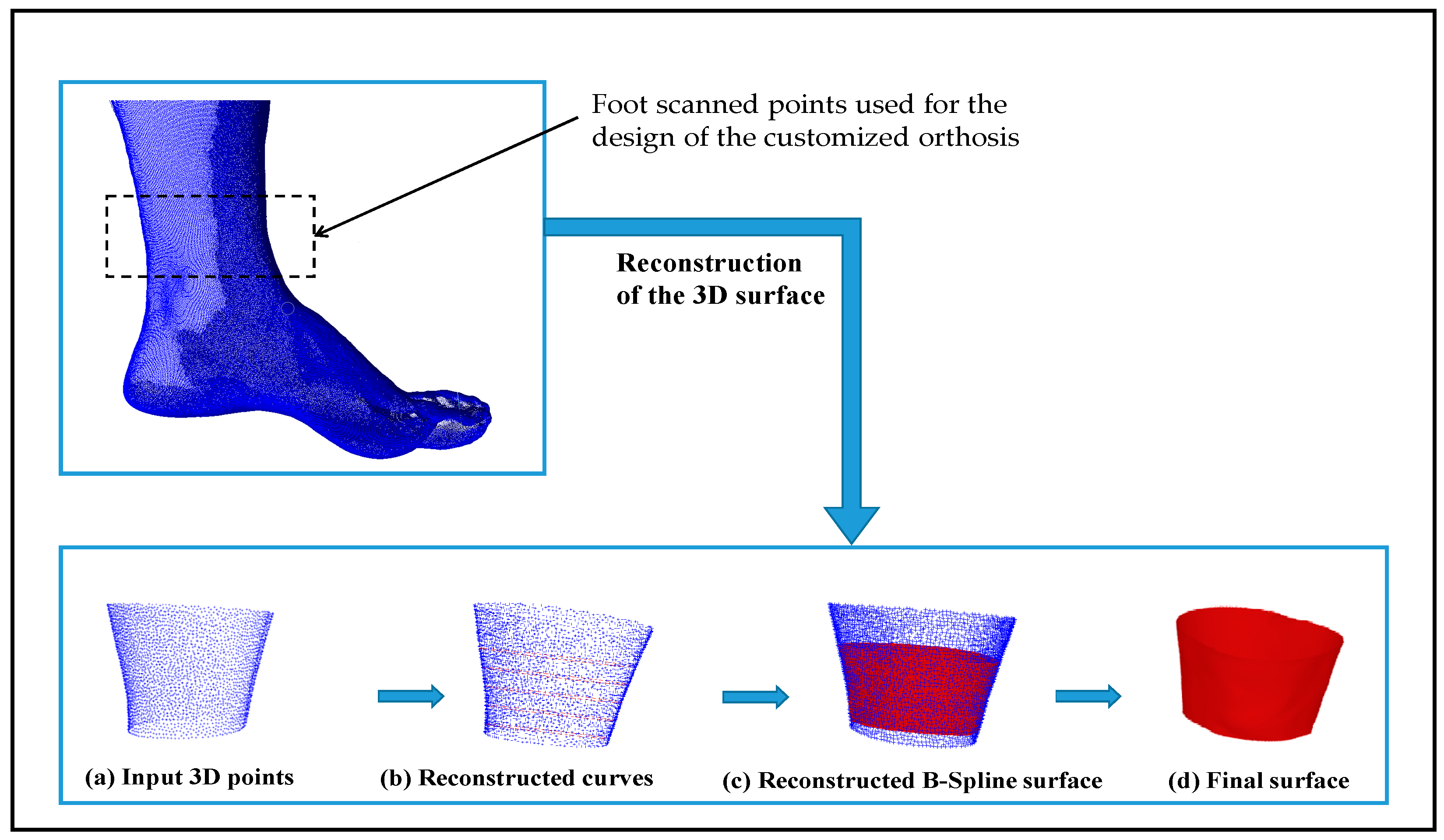
5.2. Surface Reconstruction for Customized Orthosis Design of Part of Foot
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Disability and Health. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 15 November 2022).
- Stein, R.B.; Everaert, D.G.; Thompson, A.K.; Chong, S.L.; Whittaker, M.; Robertson, J.; Kuether, G. Long-Term Therapeutic and Orthotic Effects of a Foot Drop Stimulator on Walking Performance in Progressive and Nonprogressive Neurological Disorders. Neurorehabilit. Neural Repair 2010, 24, 152–167. [Google Scholar] [CrossRef] [PubMed]
- Mavroidis, C.; Ranky, R.G.; Sivak, M.L.; Patritti, B.L.; DiPisa, J.; Caddle, A.; Gilhooly, K.; Govoni, L.; Sivak, S.; Lancia, M.; et al. Patient Specific Ankle-Foot Orthoses Using Rapid Prototyping. J. Neuroeng. Rehabil. 2011, 8, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Fitzpatrick, A.P.; Mohanned, M.I.; Collins, P.K.; Gibson, I. Design of a Patient Specific, 3D Printed Arm Cast. In Proceedings of the International Conference on Design and Technology, Geelong, Australia, 5–8 December 2016. [Google Scholar] [CrossRef]
- Blaya, F.; Pedro, P.S.; Pedro, A.B.S.; Lopez-Silva, J.; Juanes, J.A.; D’amato, R. Design of a Functional Splint for Rehabilitation of Achilles Tendon Injury Using Advanced Manufacturing (AM) Techniques. Implementation Study. J. Med. Syst. 2019, 43, 122. [Google Scholar] [CrossRef] [PubMed]
- Popescu, D.; Zapciu, A.; Tarba, C.; Laptoiu, D. Fast Production of Customized Three-Dimensional-Printed Hand Splints. Rapid Prototyp. J. 2020, 26, 134–144. [Google Scholar] [CrossRef]
- Commean, P.K.; Smith, K.E.; Vannier, M.W. Design of a 3-D Surface Scanner for Lower Limb Prosthetics: A Technical Note. J. Rehabil. Res. Dev. 1996, 33, 267–278. [Google Scholar] [PubMed]
- Palousek, D.; Rosicky, J.; Koutny, D.; Stoklásek, P.; Navrat, T. Pilot Study of the Wrist Orthosis Design Process. Rapid Prototyp. J. 2014, 20, 27–32. [Google Scholar] [CrossRef]
- Choi, W.S.; Jang, W.H.; Kim, J.B. A Pilot Study for Usefulness of Customized Wrist Splint By Thermoforming Manufacture Method Using 3D Printing: Focusing on Comparative Study with 3D scanning Manufacture Method. J. Rehabil. Welf. Eng. Assist. Technol. 2018, 12, 149–158. [Google Scholar] [CrossRef]
- Mahmood, N.; Camallil, O.; Tardi, T. Multiviews Reconstruction for Prosthetic Design. Int. Arab. J. Inf. Technol. 2012, 9, 49–55. [Google Scholar]
- Venkateswaran, N.; Hans, W.J.; Padmapriya, N. 3D Design of Orthotic Casts and Braces in Medical Applications. Adv. Mater. Process. Technol. 2021, 7, 136–149. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.D.M.; Martinello, K.; Fucile, S.; Cafolla, D. User-Tailored Orthosis Design for 3D Printing with Plactive: A Quick Methodology. Crystals 2021, 11, 561. [Google Scholar] [CrossRef]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface Reconstruction from Unorganized Points. Comput. Graph. (ACM) 1992, 26, 71–78. [Google Scholar] [CrossRef]
- Dinh, H.Q.; Turk, G.; Slabaugh, G. Reconstructing Surfaces Using Anisotropic Basis Functions. In Proceedings of the Eighth IEEE International Conference on Computer Vision. ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 2, pp. 606–613. [Google Scholar] [CrossRef]
- Carr, J.C.; Beatson, R.K.; Cherrie, J.B.; Mitchell, T.J.; Fright, W.R.; McCallum, B.C.; Evans, T.R. Reconstruction and Representation of 3D Objects with Radial Basis Functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques-SIGGRAPH ’01, Los Angeles, CA, USA, 12–17 August 2001; ACM Press: New York, NY, USA, 2001; pp. 67–76. [Google Scholar] [CrossRef]
- Hornung, A.; Leif, K. Robust Reconstruction of Watertight 3D Models from Non-Uniformly Sampled Point Clouds without Normal Information. In Eurographics Symposium on Geometry Processing; Konrad, P., Alla, S., Eds.; The Eurographics Association: Sardinia, Italy, 2006; pp. 41–50. [Google Scholar] [CrossRef]
- Alliez, P.; David, C.-S.; Tong, Y.; Desbrun, M. Voronoi-Based Variational Reconstruction of Unoriented Point Sets. In Symposium on Geometry Processing; Belyaev, A., Garland, M., Eds.; The Eurographics Association: Barcelona, Spain, 2007; Volume 67, pp. 39–48. [Google Scholar] [CrossRef]
- Huang, H.; Li, D.; Zhang, H.; Ascher, U.; Cohen-Or, D. Consolidation of Unorganized Point Clouds for Surface Reconstruction. ACM Trans. Graph. 2009, 28, 1–7. [Google Scholar] [CrossRef]
- Rouhani, M.; Sappa, A.D.; Boyer, E. Implicit B-Spline Surface Reconstruction. IEEE Trans. Image Process. 2015, 24, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Louhichi, B.; Nizar, A.; Mounir, H.; Abdelmajid, B.; Vincent, F. An Optimization-based Computational Method for Surface Fitting to Update the Geometric Information of An Existing B-Rep CAD Model. Int. J. CAD/CAM 2010, 9, 17–24. [Google Scholar]
- Louhichi, B.; Abenhaim, G.N.; Tahan, A.S. CAD/CAE Integration: Updating the CAD Model after a FEM Analysis. Int. J. Adv. Manuf. Technol. 2014, 76, 391–400. [Google Scholar] [CrossRef]
- Ben Makhlouf, A.; Louhichi, B.; Mahjoub, M.A.; Deneux, D. Reconstruction of a CAD Model from the Deformed Mesh Using B-Spline Surfaces. Int. J. Comput. Integr. Manuf. 2019, 32, 669–681. [Google Scholar] [CrossRef]
- Wang, T.-R.; Liu, N.; Yuan, L.; Wang, K.-X.; Sheng, X.-J. Iterative Least Square Optimization for the Weights of NURBS Curve. Math. Probl. Eng. 2022, 2022, 1–12. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book, 1st ed.; Monographs in Visual Communications; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar] [CrossRef]
- Niu, Y.; Zhong, Y.; Guo, W.; Shi, Y.; Chen, P. 2D and 3D Image Quality Assessment: A Survey of Metrics and Challenges. IEEE Access 2018, 7, 782–801. [Google Scholar] [CrossRef]
- Li, F.; Longstaff, A.P.; Fletcher, S.; Myers, A. Rapid and Accurate Reverse Engineering of Geometry Based on a Multi-Sensor System. Int. J. Adv. Manuf. Technol. 2014, 74, 369–382. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Differences | Limitations |
|---|---|---|
| Hoppe et al. [13] | Approximated 3D surface reconstruction from unorganized 3D point cloud | Need for improvement in method accuracy |
| Commean et al. [7] | Multiple camera setup for simultaneous capture of the lower limb | Complex process and difficult to achieve high accuracy |
| Dinh et al. [14] | Surface reconstruction technique based on tensor field-driven anisotropic basis functions | Captures sharp features, no need for prior knowledge about surface topology, moderate accuracy (average Euclidean distance error of 0.0120) |
| Carr et al. [15] | Surface reconstruction using radial basis functions (RBF) and hole-filling | Efficient and accurate reconstruction, especially for large datasets |
| Hornung and Kobbelt [16] | Unsigned distance function-based surface reconstruction with resilience to noise | Reconstruction without normal information, resilience to misalignment noise |
| Alliez et al. [17] | Voronoi algorithm-based surface reconstruction using surface normal computation | Surface normal and tensor field computation using Voronoi diagram |
| Huang et al. [18] | Weighted locally optimal projection and principal component analysis for surface reconstruction | Denoising of input 3D point cloud, normal estimation, priority-guided normal propagation, moderate accuracy |
| Mahmood et al. [10] | Surface reconstruction from video image data using a pinhole camera | Complex process based on video frames, challenging to achieve high accuracy |
| Rouhani et al. [19] | Implicit B-Spline surface-based reconstruction algorithm | No parameterization required, solving a system of linear equations |
| Louhichi et al. [21] | Weighted displacement estimation-based surface reconstruction for deformed mesh | Improved algorithm for control point approximation in B-Spline surface reconstruction, comparison of error with existing methods |
| Makhlouf et al. [22] | Enhanced weighted displacement estimation-based surface reconstruction algorithm for deformed mesh | Improved control point approximation in B-Spline surface reconstruction, comparison with existing methods for efficiency validation |
| Venkateswaran et al. [11] | Microsoft Kinect sensor-based 3D reconstruction method using RGB and depth images | Significant reconstruction errors |
| Chaparro-Rico et al. [12] | 3D scan of the limb using MATLAB software, boundary surface generation using SolidWorks software | Accuracy not specified |
| Overall | Ongoing improvement in the quality of resulting surfaces | Current methods need further progress in result robustness and accuracy to meet medical device design requirements |
| Number of Points | Reconstruction Error (mm) | |
|---|---|---|
| 1st case | 6294 | 0.06821 × 10−6 |
| 2nd case | 6365 | 3.204 × 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alrasheedi, N.H.; Ben Makhlouf, A.; Louhichi, B.; Tlija, M.; Hajlaoui, K. Customized Orthosis Design Based on Surface Reconstruction from 3D-Scanned Points. Prosthesis 2024, 6, 93-106. https://doi.org/10.3390/prosthesis6010008
Alrasheedi NH, Ben Makhlouf A, Louhichi B, Tlija M, Hajlaoui K. Customized Orthosis Design Based on Surface Reconstruction from 3D-Scanned Points. Prosthesis. 2024; 6(1):93-106. https://doi.org/10.3390/prosthesis6010008
Chicago/Turabian StyleAlrasheedi, Nashmi H., Aicha Ben Makhlouf, Borhen Louhichi, Mehdi Tlija, and Khalil Hajlaoui. 2024. "Customized Orthosis Design Based on Surface Reconstruction from 3D-Scanned Points" Prosthesis 6, no. 1: 93-106. https://doi.org/10.3390/prosthesis6010008
APA StyleAlrasheedi, N. H., Ben Makhlouf, A., Louhichi, B., Tlija, M., & Hajlaoui, K. (2024). Customized Orthosis Design Based on Surface Reconstruction from 3D-Scanned Points. Prosthesis, 6(1), 93-106. https://doi.org/10.3390/prosthesis6010008