Experimental Analysis of a Novel, Magnetic-Driven Tactile Feedback Device



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Results
2.1. Percentage of Correct Responses
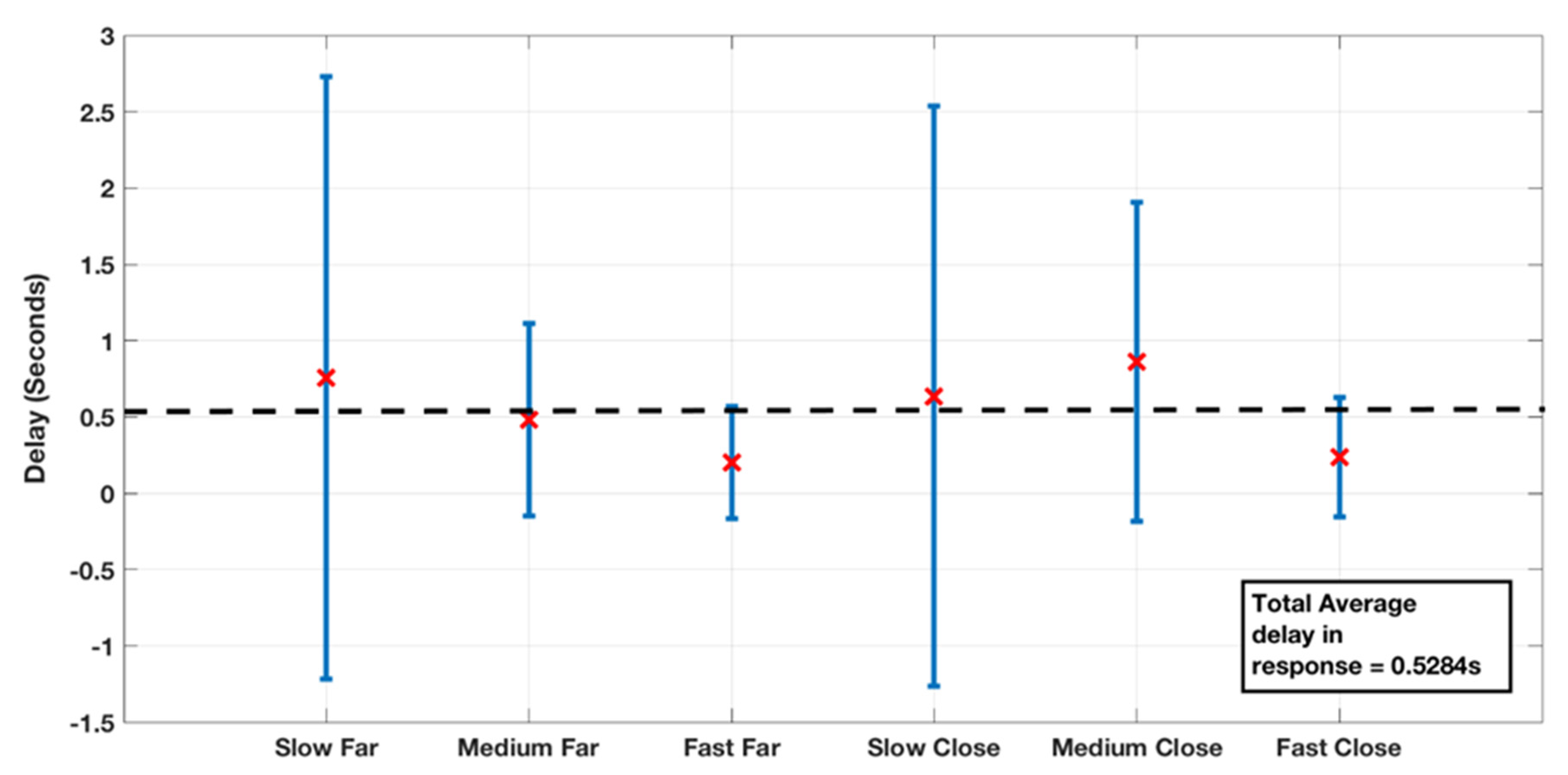
2.2. Delay in Response
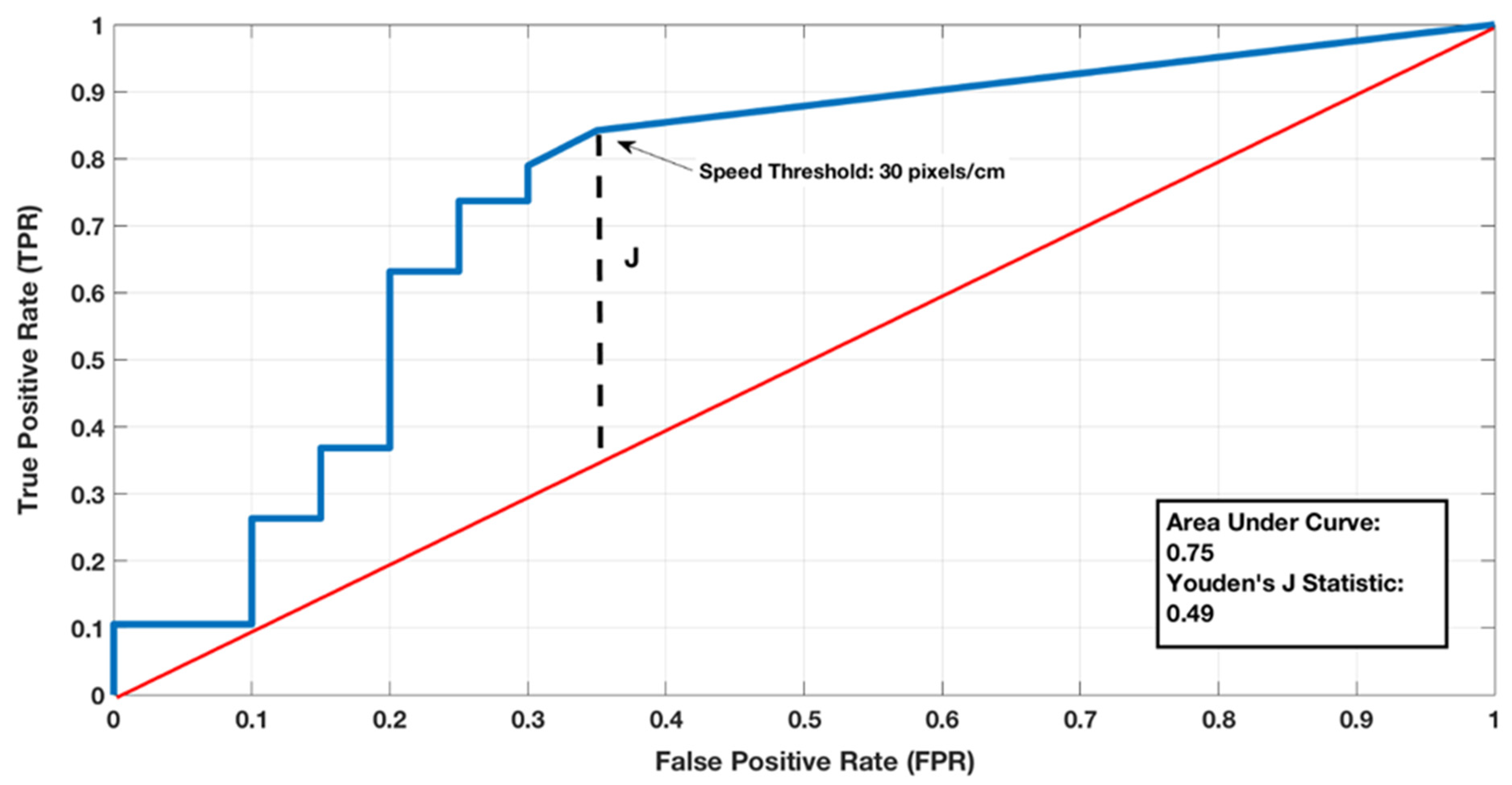
2.3. Receiver Operator Characteristic Analysis
3. Discussion
4. Materials and Methods
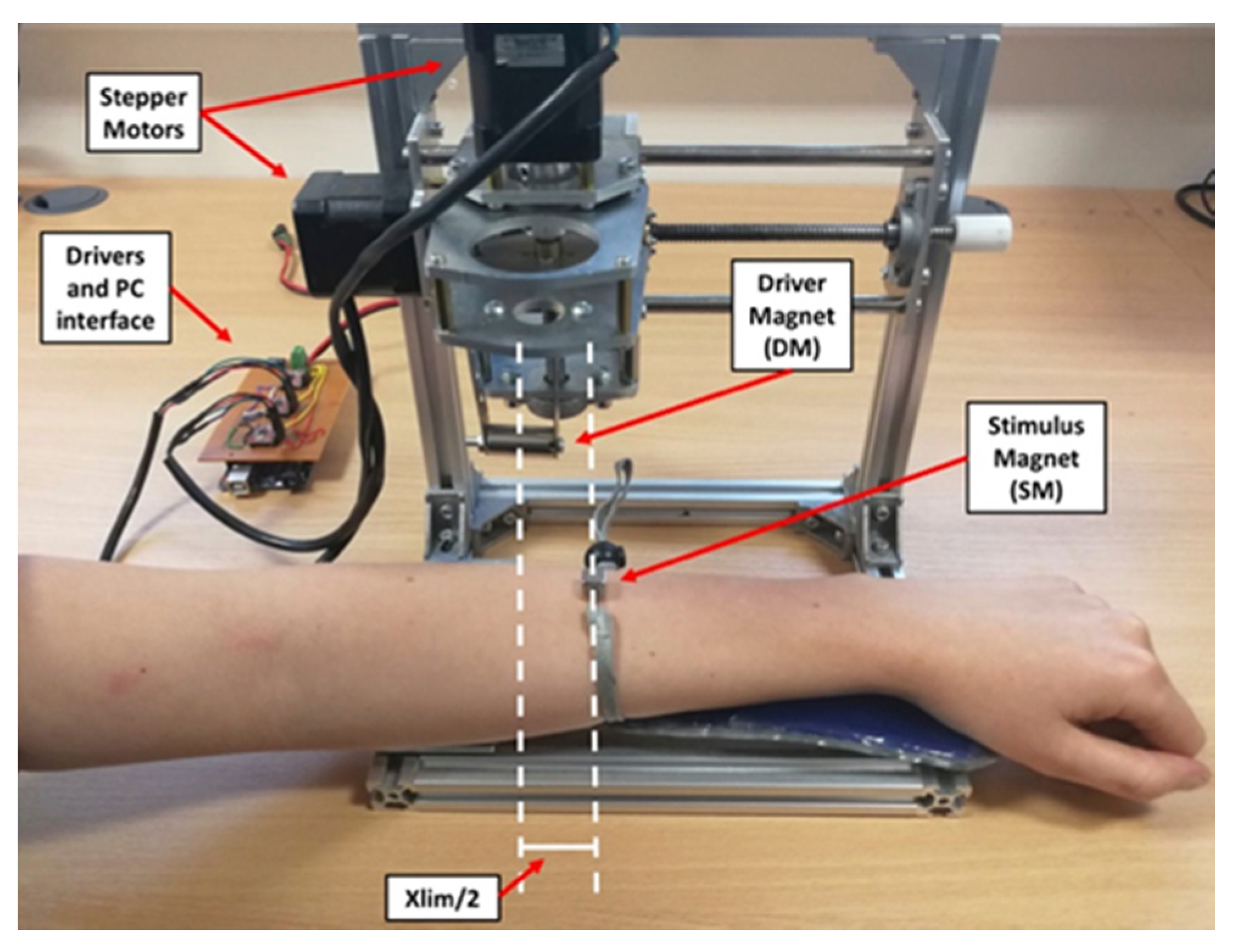
4.1. Rig Development
4.2. Specifications
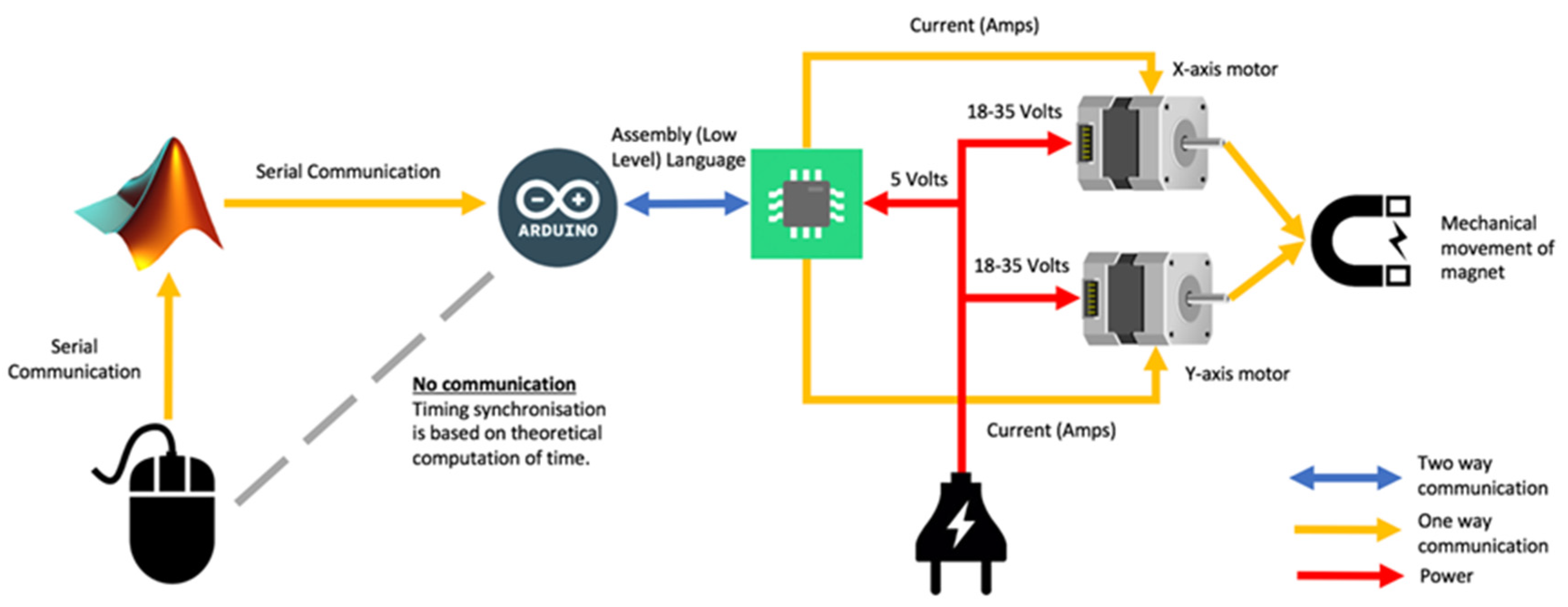
4.3. System Design
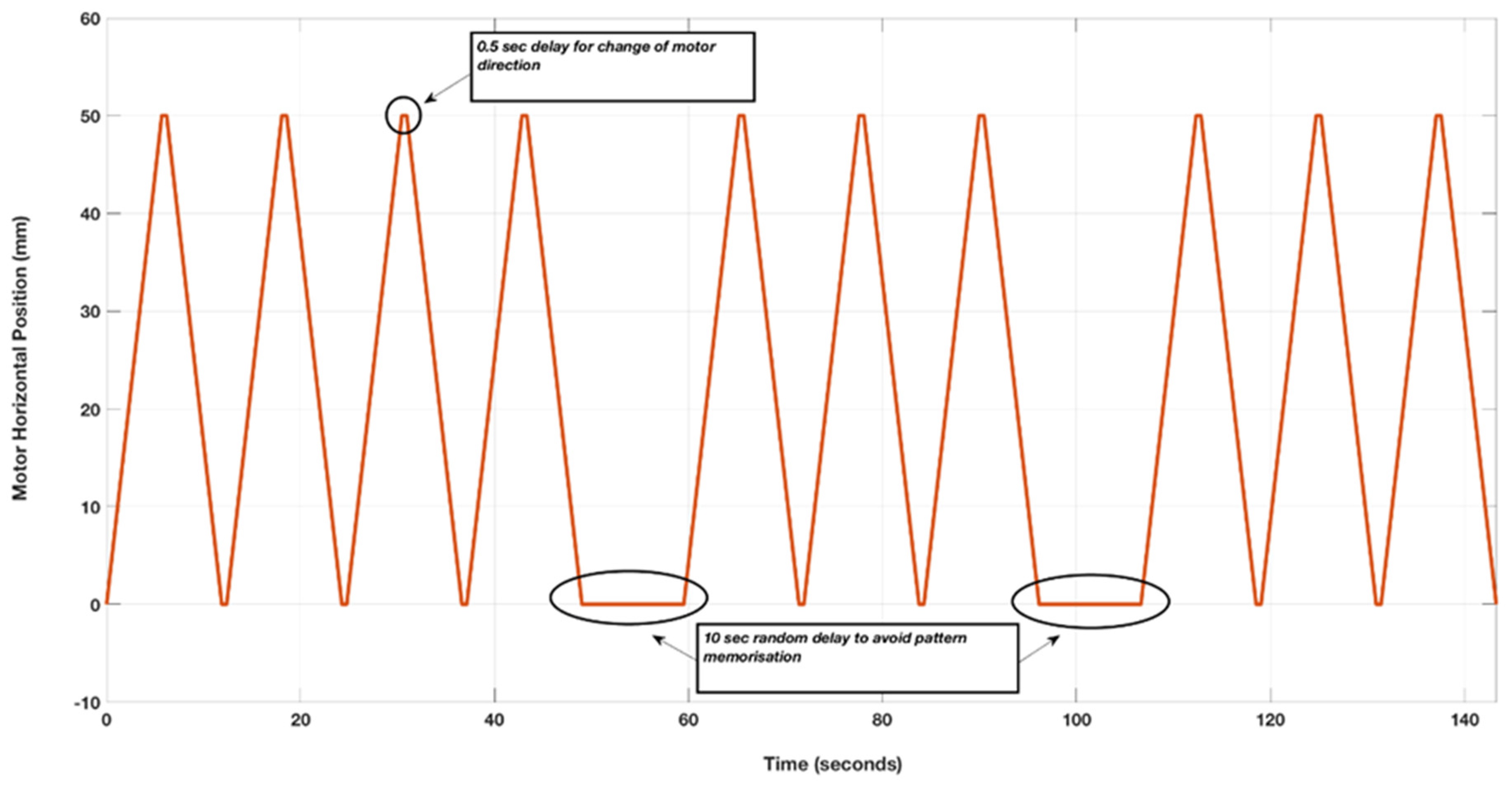
4.4. Experimental Protocol
4.5. Participants
4.6. Data Processing and Statistical Analysis
- There a significant difference between conditions in the percentage of correct responses;
- There a significant difference between conditions in the delay of response time;
- There a significant difference between different conditions in the area under the curve (AUC) from the receiver operator curve (ROC).
5. Limitations and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Waris, A.; Niazi, I.; Jamil, M.; Gilani, O.; Englehart, K.; Jensen, W.; Shafique, M.; Kamavuako, E. The effect of time on EMG classification of hand motions in able-bodied and trans-radial amputees. J. Electromyogr. Kinesiol. 2018, 40, 72–80. [Google Scholar] [CrossRef] [PubMed]
- Biddiss, E.A.; Chau, T.T. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthet. Orthot. Int. 2007, 31, 236–257. [Google Scholar] [CrossRef]
- Johnson, K. The roles and functions of cutaneous mechanoreceptors. Curr. Opin. Neurobiol. 2001, 11, 455–461. [Google Scholar] [CrossRef]
- Johnson, K.; Yoshioka, T.; Vega-Bermudez, F. Tactile functions of mechanoreceptive afferents innervating the hand. J. Clin. Neurophysiol. 2000, 17, 539–558. [Google Scholar] [CrossRef] [PubMed]
- Edin, B.B. Quantitative analysis of static strain sensitivity in human mechanoreceptors from hairy skin. J. Neurophysiol. 1992, 67, 1105–1113. [Google Scholar] [CrossRef] [PubMed]
- Olausson, H.; Wessberg, J.; Kakuda, N. Tactile directional sensibility: Peripheral neural mechanisms in man. Brain Res. 2000, 866, 178–187. [Google Scholar] [CrossRef]
- Srinivasan, M.A.; Whitehouse, J.M.; LaMotte, R.H. Tactile detection of slip: Surface microgeometry and peripheral neural codes. J. Neurophysiol. 1990, 63, 1323–1332. [Google Scholar] [CrossRef]
- Macefield, V.G.; Hager-Ross, C.; Johansson, R.S. Control of grip force during restraint of an object held between finger and thumb: Responses of cutaneous afferents from the digits. Exp. Brain Res. 1996, 108, 155–171. [Google Scholar] [CrossRef]
- Brisben, A.J.; Hsiao, S.S.; Johnson, K.O. Detection of vibration transmitted through an object grasped in the hand. J. Neurophysiol. 1999, 81, 1548–1558. [Google Scholar] [CrossRef]
- Li, T.; Huang, H.; Antfolk, C.; Justiz, J.; Koch, V. Tactile display on the remaining hand for unilateral hand amputees. Curr. Dir. BioMed. Eng. 2016, 2, 399–403. [Google Scholar] [CrossRef]
- Markovic, M.; Schweisfurth, M.; Engels, L.; Bentz, T.; Wustefeld, D.; Farina, D.; Dosen, S. The clinical relevance of advanced artificial feedback in the control of a multifunctional myoelectric prosthesis. J. Neuroeng. Rehabil. 2018, 15, 28. [Google Scholar] [CrossRef]
- Marasco, P.D.; Hebert, J.S.; Sensinger, J.W.; Shell, C.E.; Schofield, J.S.; Thumser, Z.C.; Gill, S. Illusory movement perception improves motor control for prosthetic hands. Sci. Transl. Med. 2018, 10, eaao6990. [Google Scholar] [CrossRef]
- Chaubey, P.; Rosenbaum-Chou, T.; Daly, W.; Boone, D. Closed-loop vibratory haptic feedback in upper-limb prosthetic users. J. Prosthet. Orthot. 2014, 26, 120–127. [Google Scholar] [CrossRef]
- Kim, K.; Colgate, J.E.; Santos-Munne, J.J.; Makhlin, A.; Peshkin, M.A. On the Design of Miniature Haptic Devices for Upper Extremity Prosthetics. IEEE ASME Trans. Mechatron. 2010, 15, 27–39. [Google Scholar]
- Hines, L.; Petersen, K.; Lum, G.Z.; Sitti, M. Soft actuators for small-scale robotics. J. Adv. Mater. 2017, 29. [Google Scholar] [CrossRef]
- Erb, R.; Martin, J.; Soheilian, R.; Pan, C.; Barber, J. Actuating soft matter with magnetic torque. J. Adv. Funct. Mater. 2016, 26, 3859–3880. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-invasive sensory feedback methods for transradial prosthetic hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]
- Antfolk, C.; Cipriani, C.; Carrozza, M.C.; Balkenius, C.; Björkman, A.; Lundborg, G.; Sebelius, F. Transfer of tactile input from artificial hand to the forearm: Experiments in amputees and able-bodied volunteers. Disabil. Rehabil. Assist. Technol. 2013, 8, 249–254. [Google Scholar] [CrossRef]
- Dong, Y.; Mihalas, S.; Kim, S.; Yoshioka, T.; Bensmaia, S.; Niebur, E. A simple model of mechanotransduction in primate glabrous skin. J. Neurophysiol. 2013, 109, 1350–1359. [Google Scholar] [CrossRef]
- Gerling, G.J.; Rivest, I.I.; Lesniak, D.R.; Scanlon, J.R.; Wan, L. Validating a population model of tactile mechanotransduction of slowly adapting type I afferents at levels of skin mechanics, single-unit response and psychophysicis. IEEE Trans. Haptics 2014, 7, 216–228. [Google Scholar] [CrossRef]
- Wettels, N.; Parnandi, A.R.; Moon, J.; Loeb, G.E.; Sukhatme, G.S. Grip control using biomimetic tactile sensing systems. IEEE Trans. Mechatron. 2009, 14, 718–723. [Google Scholar] [CrossRef]
- Powers, D. Evaluation: From precision, recall and f-measure to ROC, informedness, markedness & correlation. J. Mach. Learn. Technol. 2011, 2. [Google Scholar]
- Conover, W.J. Practical Nonparametric Statistics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1980. [Google Scholar]
- Hochberg, Y.; Tamhane, A.C. Multiple Comparison Procedures; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1987. [Google Scholar]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshaibani, F.; Thompson, M.S.; Bergmann, J.H. Experimental Analysis of a Novel, Magnetic-Driven Tactile Feedback Device. Prosthesis 2020, 2, 25-38. https://doi.org/10.3390/prosthesis2010003
Alshaibani F, Thompson MS, Bergmann JH. Experimental Analysis of a Novel, Magnetic-Driven Tactile Feedback Device. Prosthesis. 2020; 2(1):25-38. https://doi.org/10.3390/prosthesis2010003
Chicago/Turabian StyleAlshaibani, Fahad, Mark S Thompson, and Jeroen HM Bergmann. 2020. "Experimental Analysis of a Novel, Magnetic-Driven Tactile Feedback Device" Prosthesis 2, no. 1: 25-38. https://doi.org/10.3390/prosthesis2010003
APA StyleAlshaibani, F., Thompson, M. S., & Bergmann, J. H. (2020). Experimental Analysis of a Novel, Magnetic-Driven Tactile Feedback Device. Prosthesis, 2(1), 25-38. https://doi.org/10.3390/prosthesis2010003