
Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments

Abstract
1. Introduction
- (1)
- We propose a novel dual noise estimation framework that synergizes prior knowledge and posterior refinement. Specifically, for the GNSS, we develop a joint stochastic model integrating satellite elevation angles and SNR for a priori weighting, combined with Helmert variance component estimation for posterior covariance calibration. For the INS, we establish a bias instability noise accumulation model based on Allan variance analysis within a sliding window, enabling real-time estimation of time-dependent inertial error growth.
- (2)
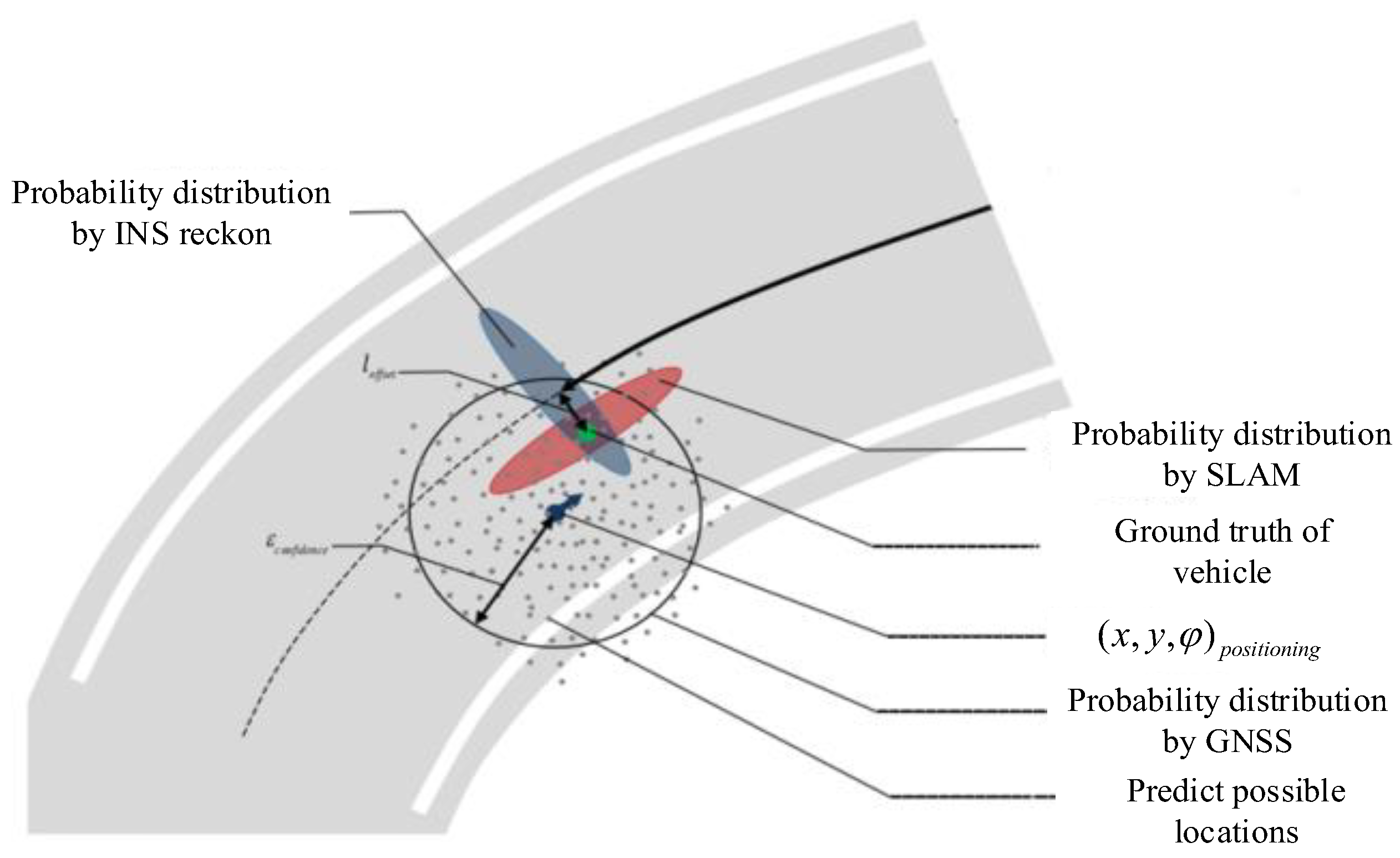
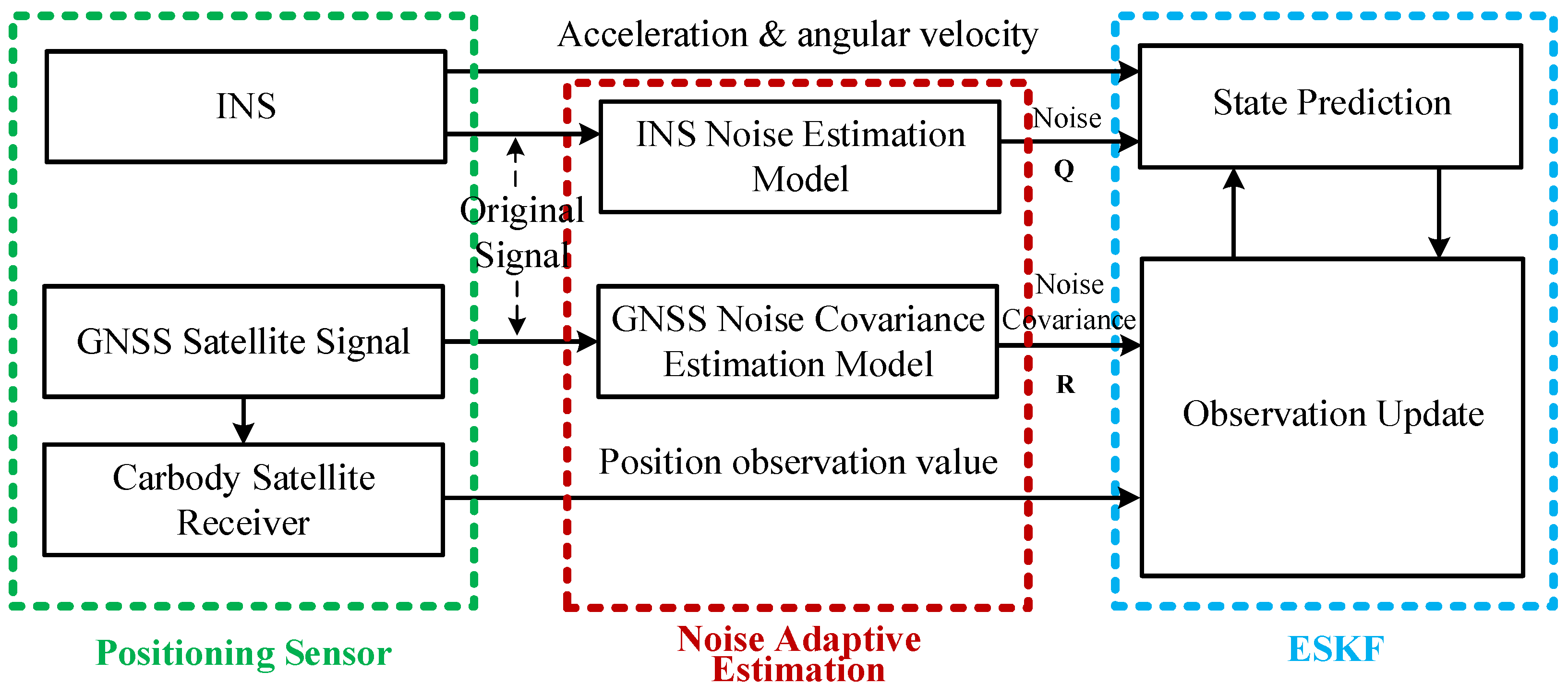
- We integrate these adaptive noise estimates dynamically into an Error-State Kalman Filter. The estimated GNSS position uncertainty covariance matrix and INS process noise characteristics are used to update the observation noise covariance and process noise covariance matrices in real time, allowing the filter to autonomously balance sensor reliability under dynamic environmental conditions.
- (3)
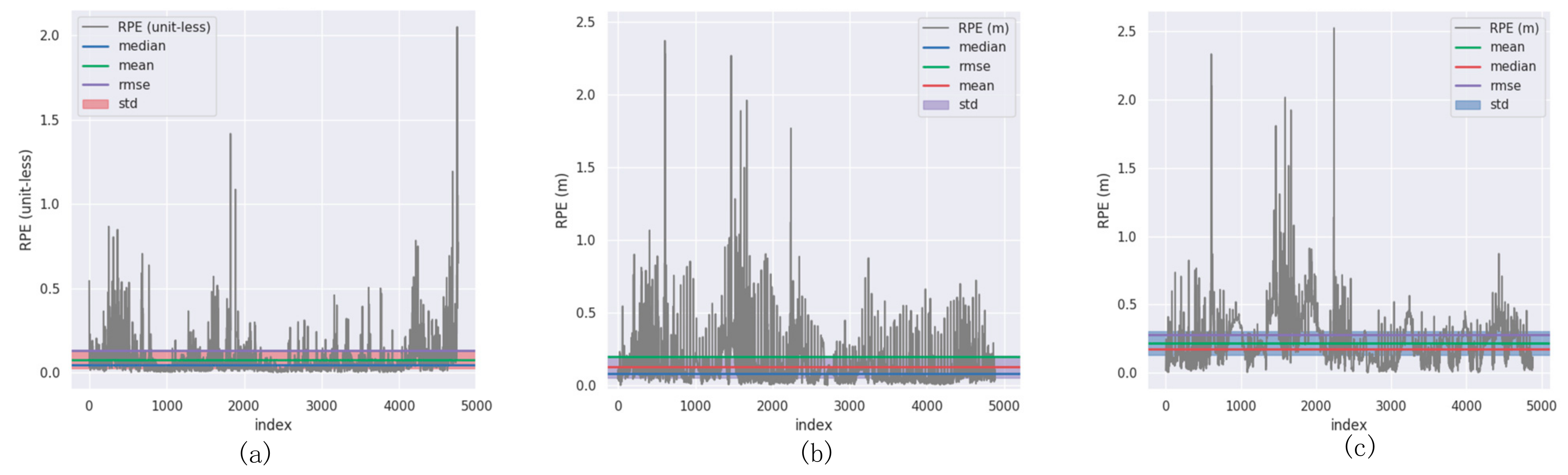
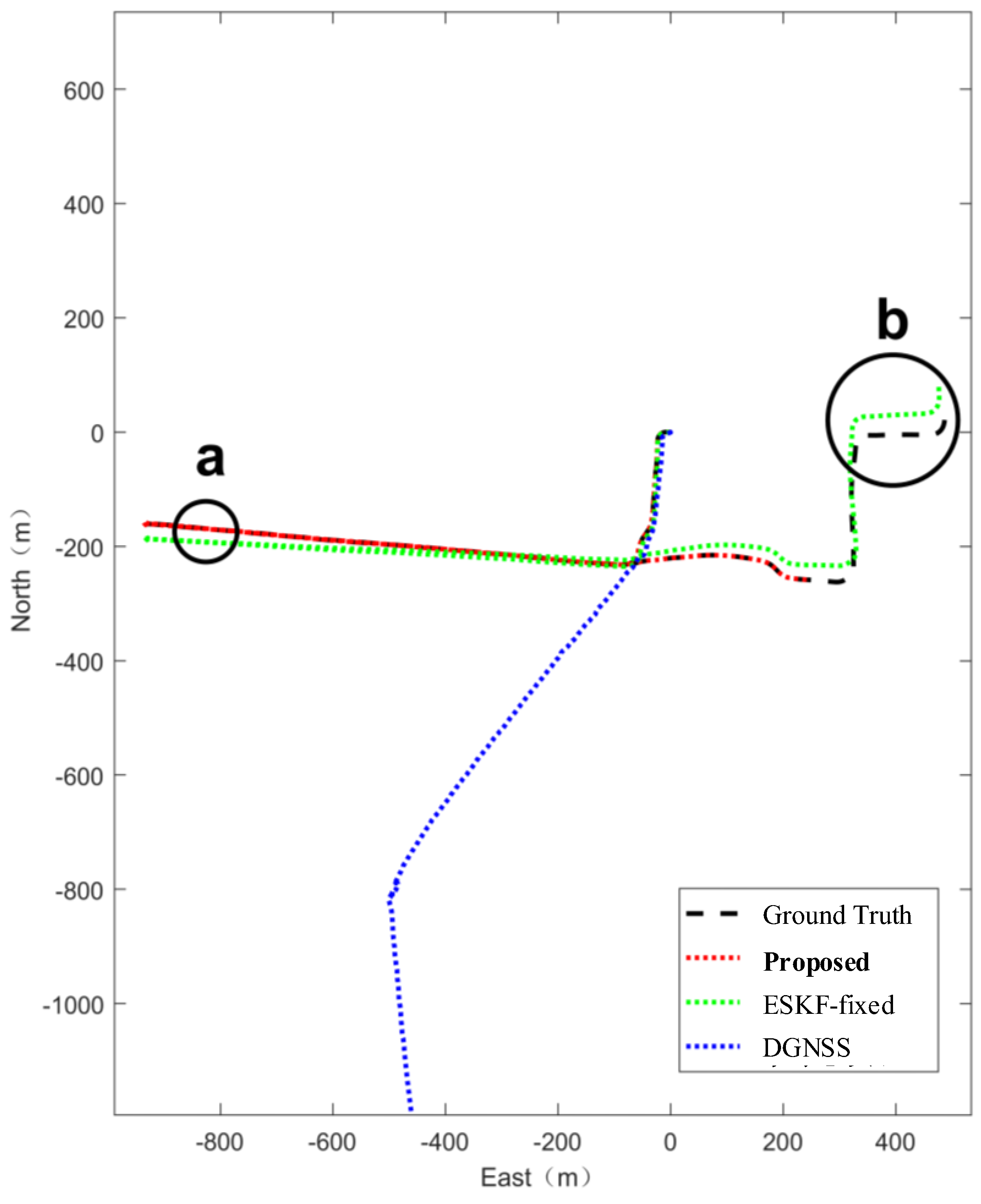
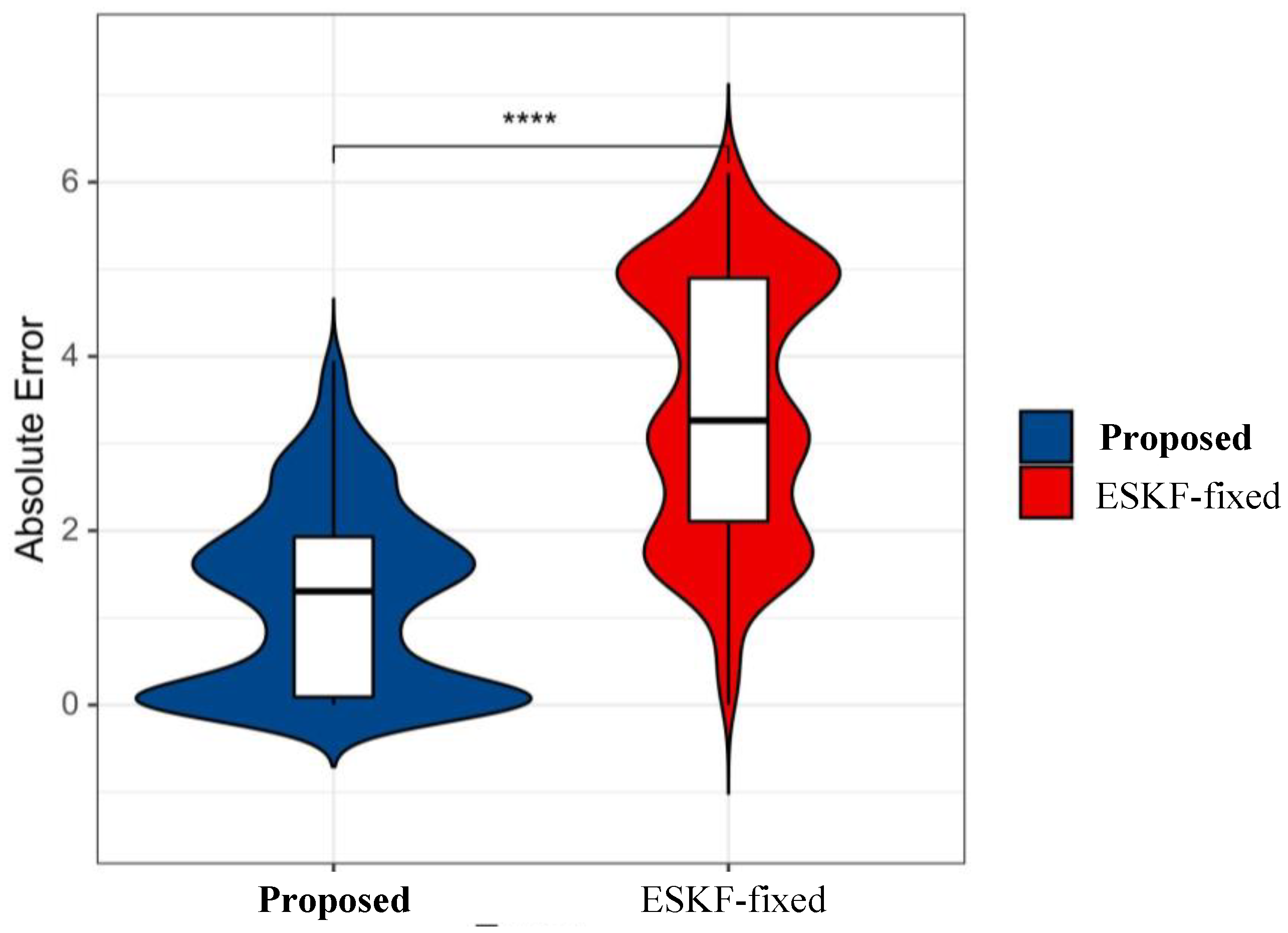
- We conduct extensive field experiments demonstrating significant performance gains. The proposed GNSS noise model achieves 37.7% higher accuracy in quantifying positioning uncertainties compared to conventional elevation-based methods. Furthermore, the integrated GNSS/INS fusion positioning maintains an average absolute trajectory error of less than 0.6 m in challenging unstructured environments with intermittent GNSS outages, outperforming state-of-the-art fixed-weight fusion methods by 36.71% in positioning consistency. This framework effectively bridges the gap between theoretical sensor noise modeling and practical environmental adaptability for autonomous driving.
2. Related Research
3. Proposed Approach
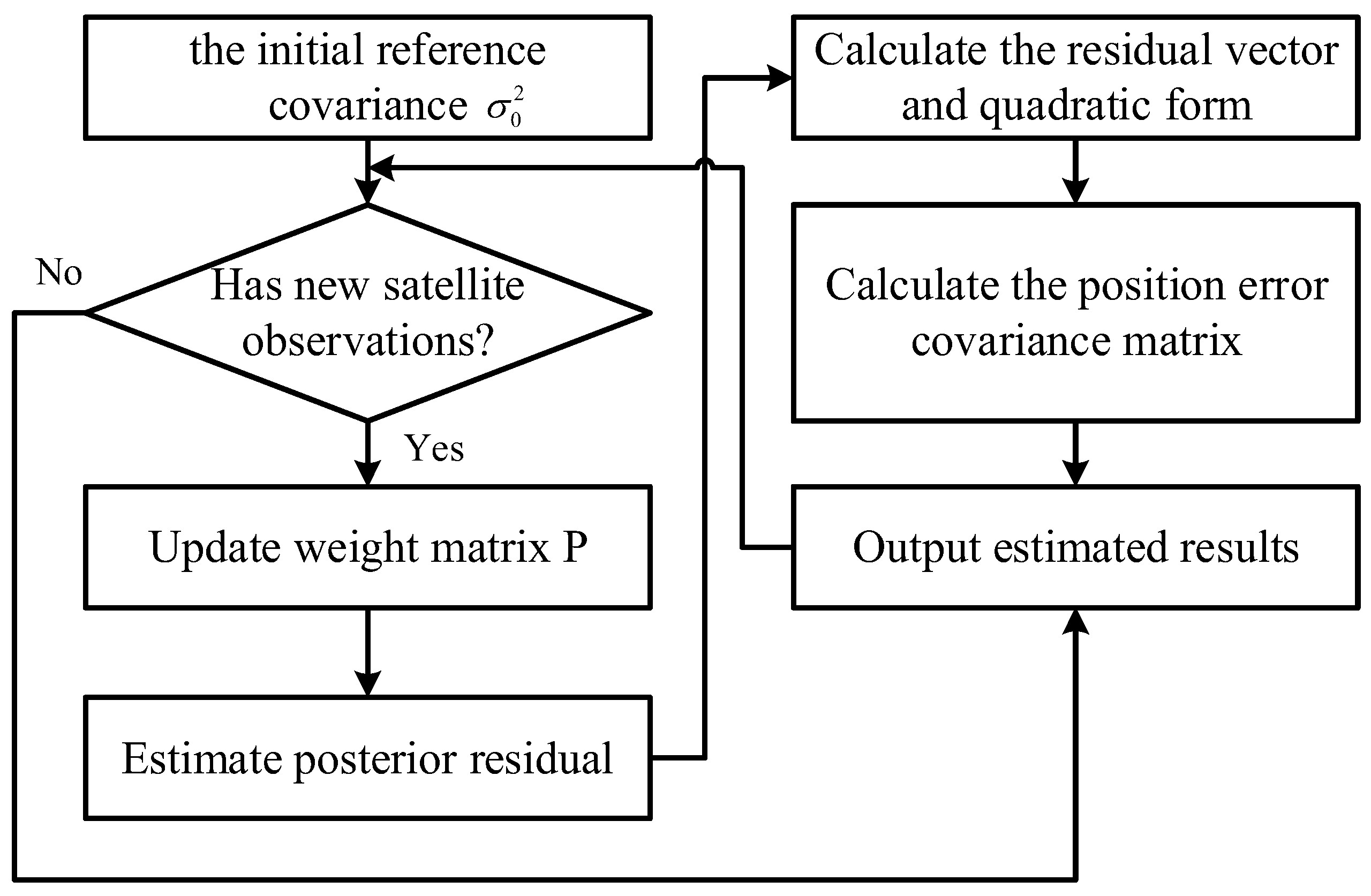
3.1. Noise Covariance Estimation Model for Satellite Positioning
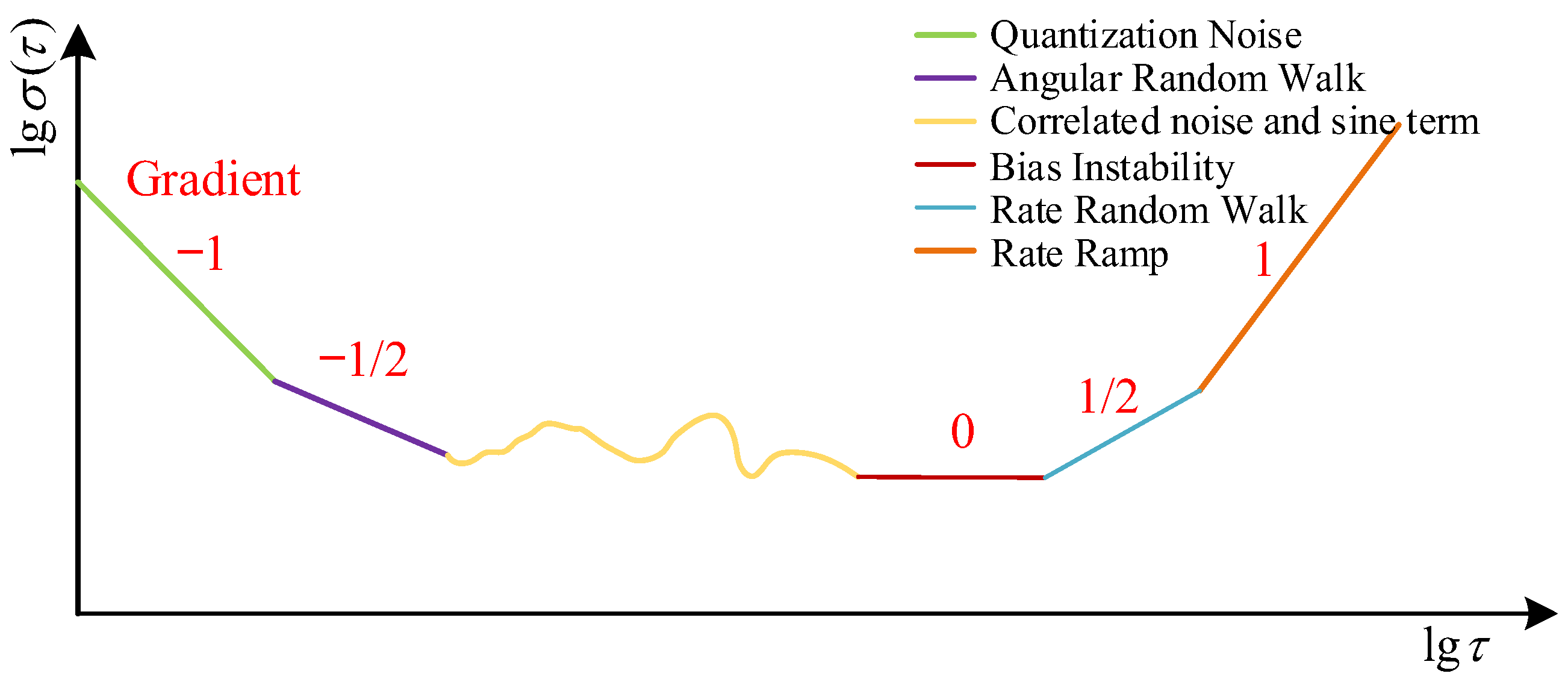
3.2. INS Noise Estimation Model Based on Allan Variance Analysis
- (a)
- Raw IMU data are pre-filtered with a 20 Hz high-pass filter to remove suspension-induced vibrations [19];
- (b)
- Noise estimation is suspended during aggressive maneuvers (lateral acceleration >2 m/s2 or angular rate > 10°/s).
3.3. ESDF-Based State Estimation Using Noise Model
3.3.1. State Equation Construction
3.3.2. Observation Equation Construction
4. Experimental Verification and Result Analysis
4.1. Experimental Platform and Methods
- (1)
- Campus Environment Localization and Noise Estimation Model Validation
- (2)
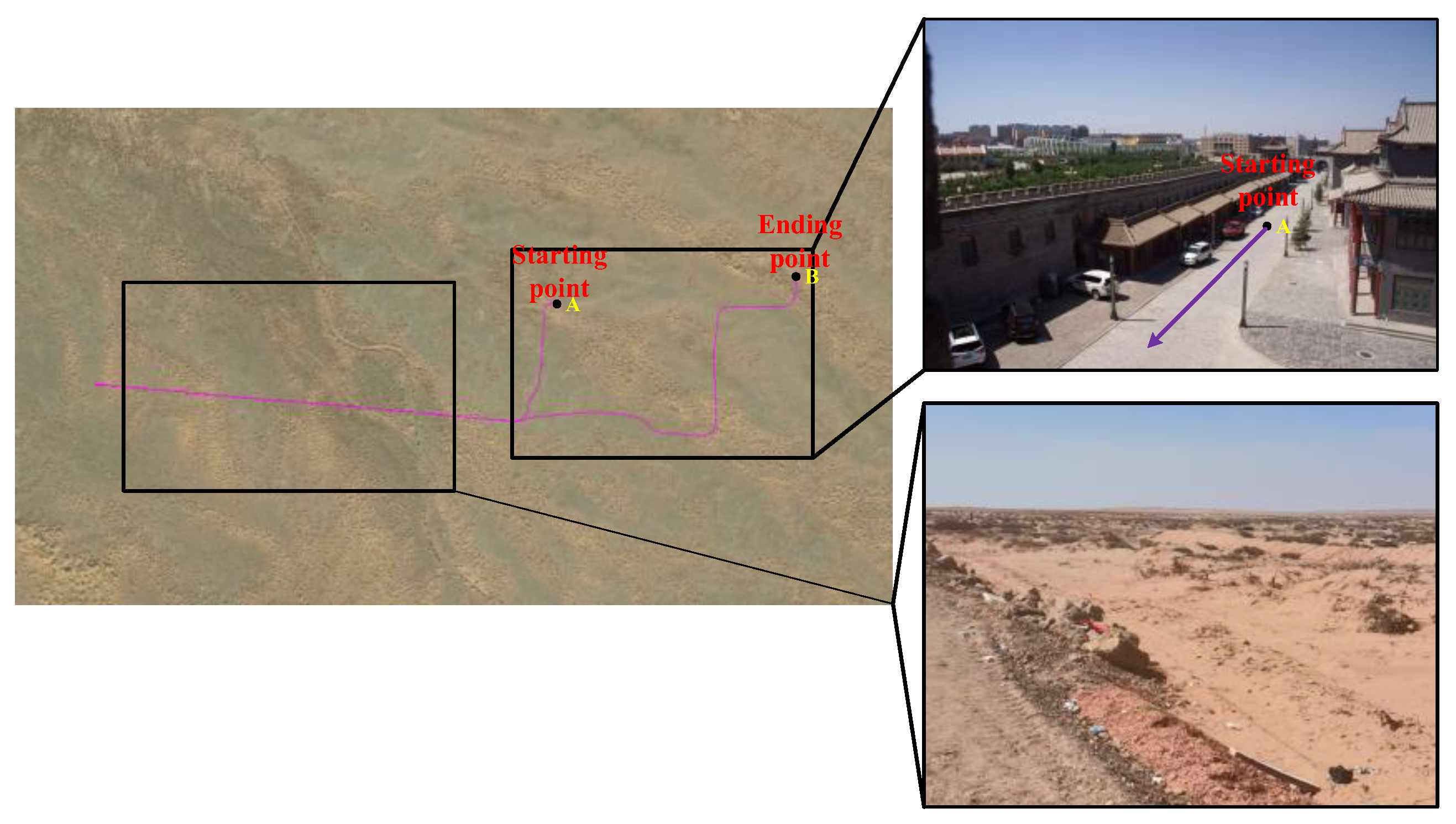
- Urban–Gobi Hybrid Environment Localization Experiment
4.2. Campus Environment Positioning and Verification Experiment
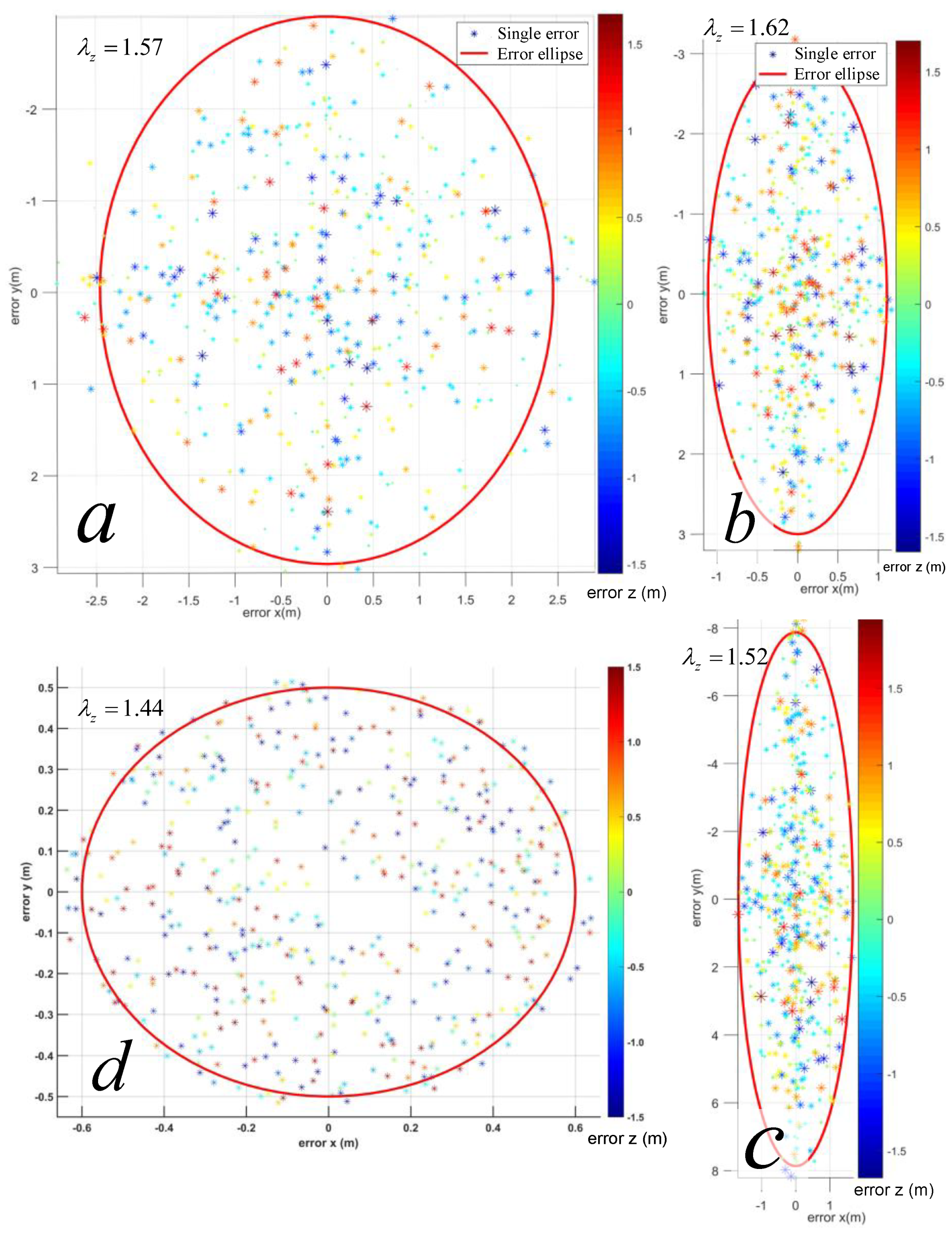
4.2.1. GNSS Positioning Noise Estimation Model Validation Experiment
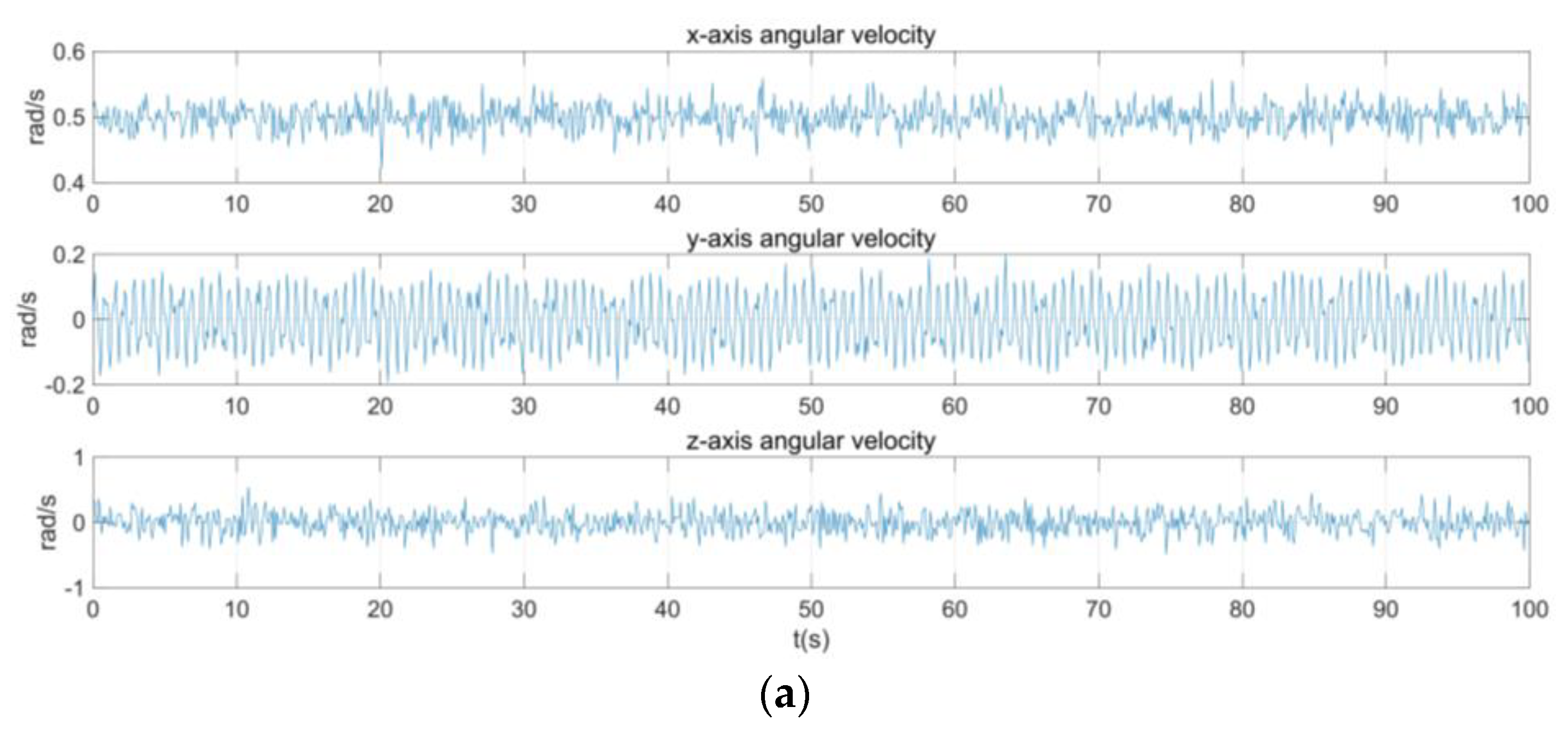
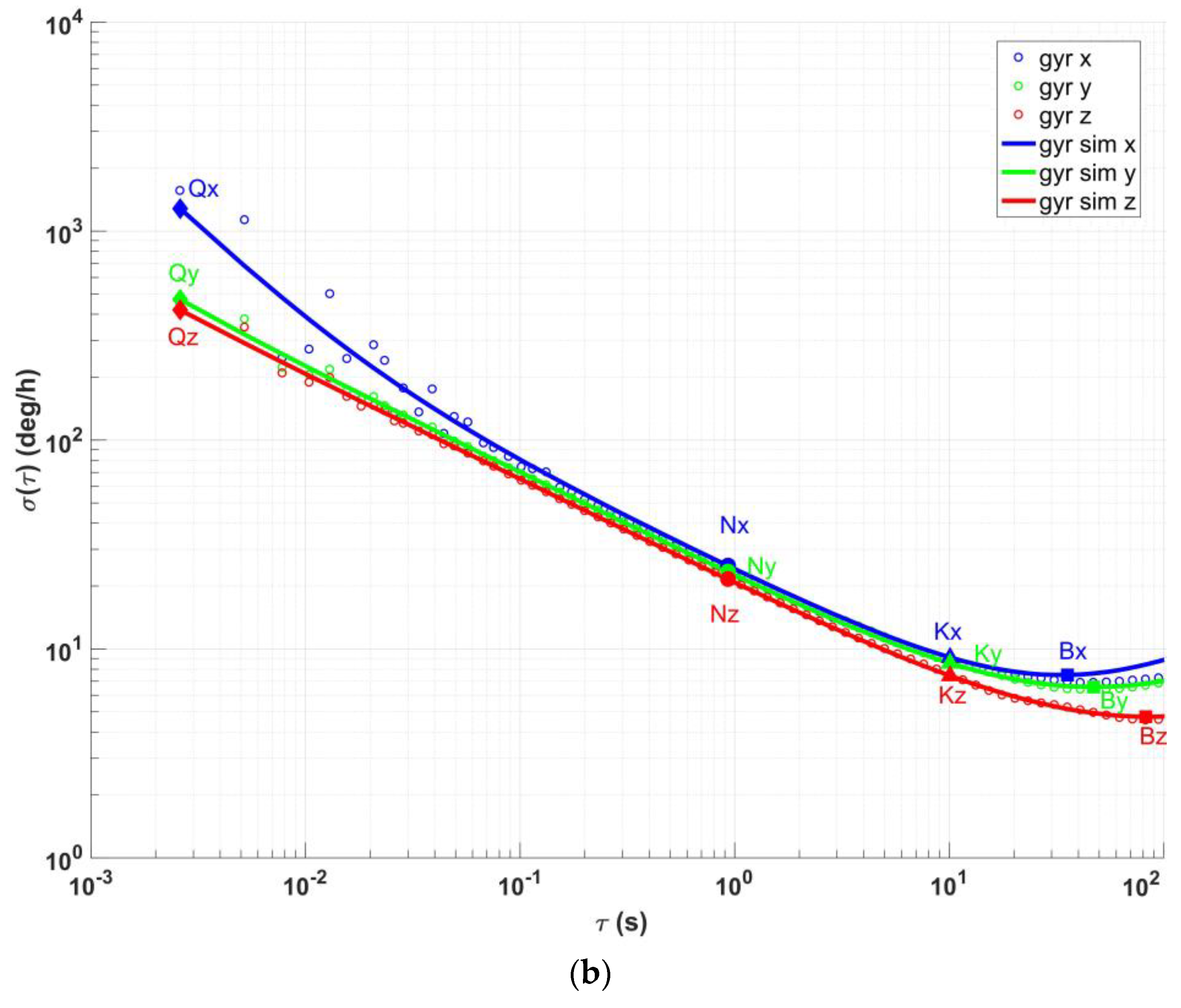
4.2.2. INS Noise Estimation Model Validation Experiment
4.2.3. Fusion Positioning Comparison Experiment
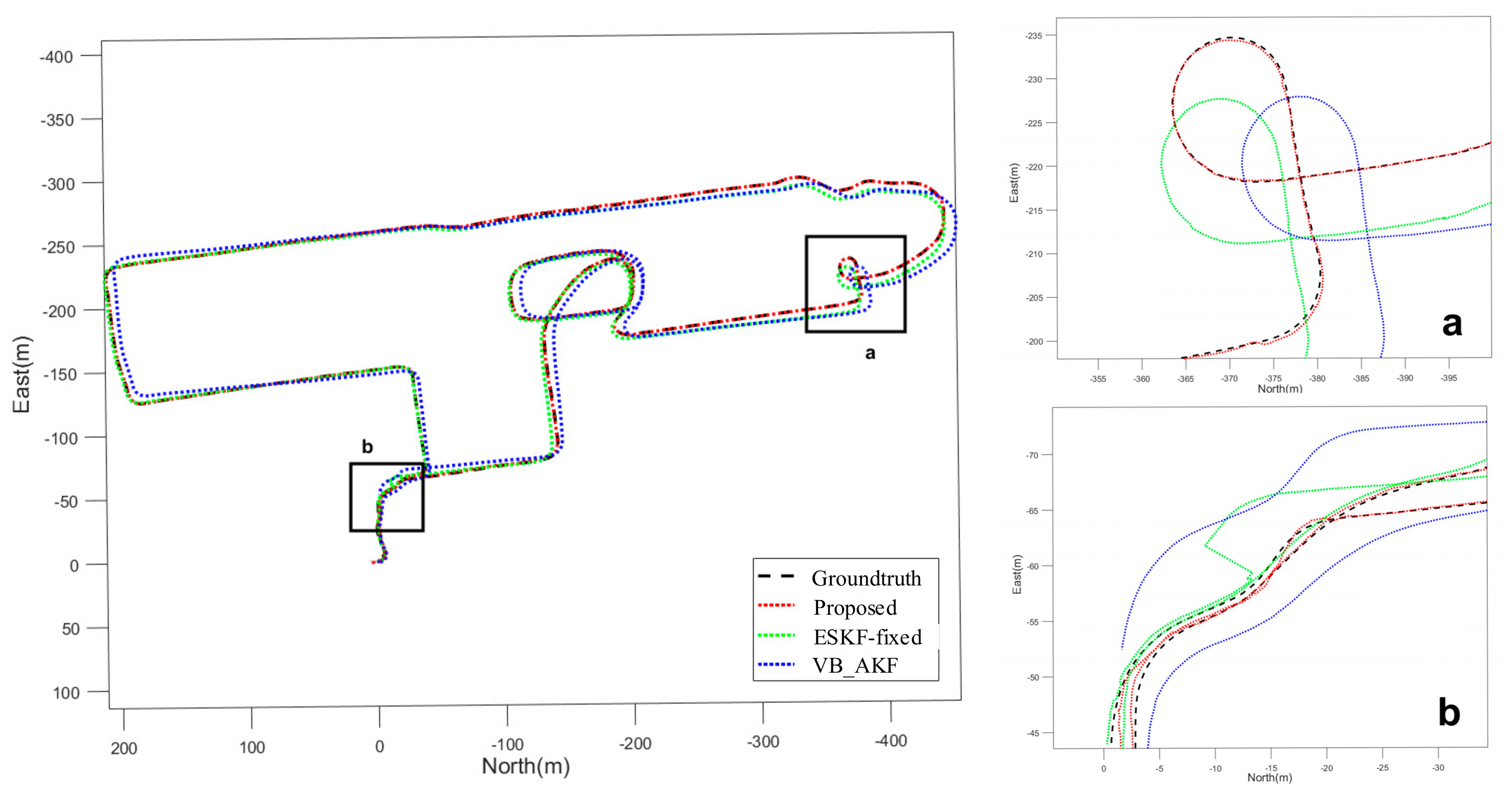
4.3. Comparison of Localization in Urban–Gobi Mixed Environments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
DURC Statement
Conflicts of Interest
References
- Wang, E.; He, H.; Jia, C. Evaluation Methods of Satellite Navigation System Performance; IntechOpen: London, UK, 2019. [Google Scholar] [CrossRef]
- Zhen, W.; Zeng, S.; Soberer, S. Robust localization and localizability estimation with a rotating laser scanner. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6240–6245. [Google Scholar]
- Li, X.; Chen, L.; Lu, Z.; Wang, F.; Liu, W.; Xiao, W.; Liu, P. Overview of Jamming Technology for Satellite Navigation. Machines 2023, 11, 768. [Google Scholar] [CrossRef]
- Tan, H.S.; Huang, J. DGPS-Based Vehicle-to-Vehicle Cooperative Collision Warning: Engineering Feasibility Viewpoints. IEEE Trans. Intell. Transp. Syst. 2006, 7, 415–428. [Google Scholar] [CrossRef]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. R-lins: A robocentric LiDAR-inertial state estimator for robust and efficient navigation. arXiv 2019, arXiv:1907.02233. [Google Scholar]
- Xing, Z.; Xia, Y. Multi-sensor optimal distributed weighted Kalman filter fusion over unreliable networks. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China; 2016; pp. 4926–4931. [Google Scholar] [CrossRef]
- Jiang, C.; Wang, Z.; Liang, H.; Zhang, S.; Tan, S. Motion State Estimation Based on Multi-sensor Fusion and Noise Covariance Estimation. Proceedings of 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021). ICAUS 2021; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Lecture Notes in Electrical Engineering. Springer: Singapore, 2022; Volume 861. [Google Scholar] [CrossRef]
- Gu, T.; Chen, S.; Tan, J.; Wang, C.; Chen, A. Research on Multi source Integrated Navigation Algorithm of SINS/GNSS/OD/Altimeter Based on Federated Filtering. Navig. Position. Timing 2021, 8, 20–26. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 5135–5142. [Google Scholar] [CrossRef]
- Ye, H.; Chen, Y.; Liu, M. Tightly Coupled 3D Lidar Inertial Odometry and Mapping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3144–3150. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Ratti, C.; Rus, D. LVI-SAM: Tightly-coupled LiDAR-Visual-Inertial Odometry via Smoothing and Mapping. arXiv 2021, arXiv:2104.10831. [Google Scholar]
- Huang, Z.; Chai, H.; Xiang, M.; Du, Z. AUV multi-source information fusion localization method based on robust factor graph. Acta Geod. Cartogr. Sin. 2023, 52, 1278–1285. [Google Scholar] [CrossRef]
- Gao, X.; Chen, J.; Tao, D.; Li, X. Multi-Sensor Centralized Fusion without Measurement Noise Covariance by Variational Bayesian Approximation. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 718–772. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, H.; Ge, B. Adaptive Unscented Kalman Filter for Target Tacking with Time-Varying Noise Covariance Based on Multi-Sensor Information Fusion. Sensors 2021, 21, 5808. [Google Scholar] [CrossRef] [PubMed]
- Duník, J.; Kost, O.; Straka, O. Design of measurement difference autocovariance method for estimation of process and measurement noise covariances. Automatica 2018, 90, 16–24. [Google Scholar] [CrossRef]
- Gao, Z.; Zhong, Y.; Zong, H.; Gao, G. Adaptive Random Weighted H∞ Estimation for System Noise Statistics. Int. J. Adapt. Control. Signal Process. 2025, 39, 214–230. [Google Scholar] [CrossRef]
- Gao, Z.; Zong, H.; Zhong, Y.; Gao, G. Limited Memory-Based Random-Weighted Kalman Filter. Sensors 2024, 24, 3850. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wang, Y.; Yan, Y.; Ren, Y.; Wang, Y.; Yin, G. Estimation of Vehicle State Based on Limited Memory Random Weighted Unscented Kalman Filter. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Gao, Z.; Mu, D.; Gao, S.; Zhong, Y.; Gu, C. Adaptive unscented Kalman filter based on maximum posterior and random weighting. Aerosp. Sci. Technol. Vol. 2017, 71, 12–24. [Google Scholar] [CrossRef]
- Gao, S.; Hu, G.; Zhong, Y. Windowing and random weighting-based adaptive unscented Kalman filter. Int. J. Adapt. Control. Signal Process. 2015, 29, 201–223. [Google Scholar] [CrossRef]
- Hu, G.; Gao, B.; Zhong, Y.; Gu, C. Unscented kalman filter with process noise covariance estimation for vehicular ins/gps integration system. Inf. Fusion 2020, 64, 194–204. [Google Scholar] [CrossRef]
- Gao, B.; Gao, S.; Hu, G.; Zhong, Y.; Gu, C. Maximum likelihood principle and moving horizon estimation based adaptive unscented Kalman filter. Aerosp. Sci. Technol. 2018, 73, 184–196. [Google Scholar] [CrossRef]
- Duan, S.; Sun, W.; Wu, Z. Application of robust adaptive EKFin INS/GNSStight combination. J. Univ. Electron. Sci. Technol. China 2019, 48, 216–220. [Google Scholar] [CrossRef]
- Yang, L.; Lin, X.; Hou, Y.; Ren, J.; Wang, M. Application of an Improved Adaptive Unscented Kalman Filter in Vehicle Driving State Parameter Estimation. Int. J. Adapt. Control. Signal Process. 2025, 39, 1021–1035. [Google Scholar] [CrossRef]
- Feng, B.; Fu, M.; Ma, H.; Xia, Y.; Wang, B. Kalman Filter with Recursive Covariance Estimation—Sequentially Estimating Process Noise Covariance. IEEE Trans. Ind. Electron. 2014, 61, 6253–6263. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2020, 20, 250–260. [Google Scholar] [CrossRef]
- Zhou, G.; Du, Z.; Xie, L.; Wang, T.; Liu, X. Attitude calculation based on Allan variance adaptive algorithm. Ordnance Autom. 2018, 37, 32–36. (In Chinese) [Google Scholar] [CrossRef]
- Shang, M.; Gao, H.; Chang, Q.; Xu, Y.; Wu, J.; Zhang, J. Weighting Method for GPS/GLONASS/BDS Three System Integrated Positioning. J. Terahertz Sci. Electron. Inf. 2014, 3, 374–379. (in Chinese). [Google Scholar] [CrossRef]
- Ma, Q. Research on Differential Estimation of GPS/BDS/DORIS/SLR Observation Noise. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2016. (In Chinese). [Google Scholar]
- Brossard, M.; Barrau, A.; Bonnabel, S. AI-IMU dead-reckoning. IEEE Trans. Intell. Veh. 2020, 5, 585–595. [Google Scholar] [CrossRef]
- Li, Y.; Huang, D.; Li, M.; Zhu, D. BDS/GPS Stochastic Model Refinement and Assessment Using Satellite Elevation Angle and SNR. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume I; Lecture Notes in Electrical Engineering; Sun, J., Liu, J., Fan, S., Lu, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 340. [Google Scholar] [CrossRef]
- Lemmon, T.R.; Gerdan, G.P. The Influence of the Number of Satellites on the Accuracy of RTK GPS Positions. Aust. Surv. 1999, 44, 64–70. [Google Scholar] [CrossRef]
- Bilich, A.; Larson, K.M. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR). Radio Sci. 2007, 42, 42–58. [Google Scholar] [CrossRef]
- Brian, E.G.; Mark, A.B. A Least-Squares Normalized Error Regression Algorithm with Application to the Allan Variance Noise Analysis Method. In Proceedings of the 2006 IEEE/ION Position, Location, And Navigation Symposium, Coronado, CA, USA, 25–27 April 2006. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methodology | Core Mechanism | Representative Studies | Key Advantages | Main Limitations |
|---|---|---|---|---|
| Filter-Based | Recursive Bayesian estimation (e.g., KF, EKF, UKF, ESKF). Predict-Update cycle. | [4,5,6,7,8] | Computational efficiency, suitability for real-time applications, well-established theory. | Assumes fixed noise statistics, susceptible to error accumulation, sensitive to outliers/degradation (centralized). |
| FGO-Based | Formulate estimation as graph optimization. States as nodes, measurements as edges. Solve for optimal configuration. | [9,10,11,12] | Handles diverse constraints effectively, achieves global consistency, robust to local minima with loop closures. | Higher computational cost (especially for large graphs), potential challenges for strict real-time performance. |
| Adaptive Filtering | Dynamically estimate process (Q) and/or measurement (R) noise covariance online. | [13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30] | Enhances robustness to sensor degradation, environmental changes, and outliers. Improves accuracy under dynamic noise. | Estimation lag (especially posterior methods), sensitivity to initialization/tuning, potential complexity increase, may rely on specific noise models. |
| Noise Type | X-Axis | Y-Axis | Z-Axis | Unit |
|---|---|---|---|---|
| Quantization Noise (Q) | 1.926 | 0.708 | 0.631 | |
| Angular Random Walk (N) | 24.969 | 23.344 | 21.520 | |
| Angular Rate Random Walk (K) | 4.964 | 4.666 | 4.059 | |
| Bias Instability (B) | 7.508 | 6.576 | 4.733 |
| Method | Maximum Error (m) | Average Error (m) | Root Mean Square (m) | Sum of Variance (m2) |
|---|---|---|---|---|
| Proposed | 2.0472 | 0.0788 | 0.1319 | 82.8566 |
| ESKF-fixed | 2.3688 | 0.1245 | 0.1955 | 186.4935 |
| VB_AKF | 2.5258 | 0.2205 | 0.2809 | 385.0484 |
| Module | Frequency (Hz) | Avg. Time (ms) | Max Time (ms) |
|---|---|---|---|
| GNSS Noise Estimation | 10 | 0.87 | 1.54 |
| INS Noise Estimation | 0.01 (1/100) | 15.52 | 25.28 |
| ESKF Prediction | 100 | 0.05 | 0.12 |
| ESKF Update | 10 | 0.18 | 0.33 |
| Method | Maximum Error (m) | Average Error (m) | Root Mean Square (m) | Sum of Variance (m2) |
|---|---|---|---|---|
| Proposed | 0.7310 | 0.0919 | 0.1097 | 11.4267 |
| ESKF-fixed | 0.8809 | 0.1016 | 0.1240 | 18.3227 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Qiu, M.; Wang, T.; Yao, X.; Cong, H.; Zhang, Y. Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments. Vehicles 2025, 7, 77. https://doi.org/10.3390/vehicles7030077
Feng X, Qiu M, Wang T, Yao X, Cong H, Zhang Y. Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments. Vehicles. 2025; 7(3):77. https://doi.org/10.3390/vehicles7030077
Chicago/Turabian StyleFeng, Xingyang, Mianhao Qiu, Tao Wang, Xinmin Yao, Hua Cong, and Yu Zhang. 2025. "Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments" Vehicles 7, no. 3: 77. https://doi.org/10.3390/vehicles7030077
APA StyleFeng, X., Qiu, M., Wang, T., Yao, X., Cong, H., & Zhang, Y. (2025). Noise-Adaptive GNSS/INS Fusion Positioning for Autonomous Driving in Complex Environments. Vehicles, 7(3), 77. https://doi.org/10.3390/vehicles7030077