1. Introduction
Recently, traffic congestion has become a major concern in urban areas due to rapid urbanization, population growth, and increased vehicle use [
1,
2]. With the rapid expansion of cities, fuel consumption, air pollution, and travel times are exponentially increasing in the existing transportation infrastructure. Traffic Signal Control (TSC) systems are considered effective solutions as they optimize traffic light timings and improve road efficiency to alleviate congestion [
3,
4]. The use of TS controllers is one of the most widely adopted methods for managing traffic at intersections [
5].
These controllers typically fall into four main categories, namely Fixed Traffic Signal Control (FTSC), coordinated signal control, Traffic Actuated Signal Control (TASC), and Adaptive Traffic Signal Control (ATSC) [
6,
7]. However, many traffic control studies primarily depend on traffic volume and flow data. Similarly, the behavioral characteristics of drivers at intersections play an important role in traffic signal control strategy. Behaviors like acceleration patterns, reaction times, and queue discharge dynamics mainly influence intersection performance. The prior study [
8] developed a back-of-queue model of a signal-controlled intersection scheme based on driver behavior. The above-mentioned scheme effectively demonstrated how driver behavior features aid in improving the accuracy and responsiveness of traffic control models. Therefore, significant traffic signal control systems should consider quantitative traffic data as well as qualitative behavioral insights, thereby handling real-world traffic dynamics effectively. Yet, they require regular updates to adapt to changing traffic demands [
9]. These systems may become ineffective without timely updates, contributing to approximately 5–10% of total traffic congestion and delays [
10,
11]. Furthermore, the existing methods employed a fixed-time-based fuzzy controller to diminish the total delay and average queue length in urban intersections [
12]. But the fixed-time traffic signal controller had high maintenance costs and low coverage [
13].
Therefore, Reinforcement Learning (RL) has emerged as a promising technique in recent years due to its ability to learn optimal policies through interaction with the traffic environment [
14,
15]. RL dynamically adapts to changing conditions by receiving feedback in the form of rewards, unlike rule-based systems, enabling more flexible and responsive traffic management [
16,
17]. Likewise, to enhance signal optimization, some conventional works incorporated Machine Learning (ML) and Deep Learning (DL)-based methodologies. Some of the prevailing methods combined graph convolutional networks and deep reinforcement learning to improve the efficiency of dynamic traffic control [
18]. However, these methods still face challenges related to real-time adaptability and flexibility [
19]. Among traditional traffic signal control methods, the Time-of-Day (TOD) approach gained immense popularity owing to its flexibility and cost-effectiveness. TOD strategies involve switching between pre-set signal timing plans according to the predictable traffic demand patterns throughout the day. Moreover, the Time-of-Day (TOD) control strategy predefines signal timings based on expected traffic volumes at different times. TOD is more effective at reducing congestion under stable and predictable conditions. But TOD was not generalized well enough to manage dynamic and non-recurrent traffic patterns (fluctuating pedestrian flows or incidents). The TOD control strategies failed to adapt to the dynamic traffic conditions, thus resulting in restricted signal usage. In addition, none of the conventional traffic control strategy works focused on pedestrians, cyclists, and other non-motorized road users, reducing TSO effectiveness. Therefore, adaptive and multi-objective optimization approaches are essential to handle the varying traffic intensities and multiple intersections [
20,
21]. Thus, this research is motivated by the need to facilitate responsive and real-time intelligent traffic analytics using a multi-object-based framework. This paper proposes a multi-object-based efficient TSO framework via traffic flow analysis and intensity estimation using UCB-MRL-CSFL.
1.1. Problem Statement
The limitations of several conventional methodologies are demonstrated as follows.
None of the conventional approaches concentrated on pedestrians, cyclists, or other non-motorized road users, limiting TSO performance.
The prevailing traffic control framework increased vehicle waiting time, leading to longer queues and congestion at intersections [
22].
The conventional framework used a fixed green light duration, causing delays and reducing system efficiency [
23].
The prior methodology led to uneven traffic flow due to the high-density connected vehicle areas [
24].
Some prevailing works failed to facilitate the smooth flow of emergency vehicles, impacting response efficiency.
Due to the highly variable traffic patterns, the real-time prediction and dynamic adjustment of TSs are challenging.
1.2. Objectives
To surpass the limitations, the proposed framework’s objective is depicted as follows.
The TC-YOLO is applied to detect pedestrians, cyclists, and other non-motorized users.
The traffic intensity is estimated to reduce the waiting time of the vehicles and longer queues at intersections.
The UCB-MRL-CSFL is employed to adjust TSs in real-time traffic conditions.
The CVMKF is used to handle the uneven distribution of traffic flow and congestion with fewer connected devices.
The emergency vehicles are separated based on color segmentation.
The FVOF is applied to analyze the highly dynamic and changing traffic patterns for traffic flow analysis.
The paper’s structure is demonstrated as follows:
Section 2 indicates the literature survey,
Section 3 establishes the proposed methodology,
Section 4 illustrates the results and discussion, and
Section 5 depicts the conclusion with future scope.
2. Literature Survey
A framework for predicting traffic and intelligent signal control in smart cities was presented in [
22]. Primarily, the IoT-enabled traffic data was collected from a relevant dataset, followed by feature extraction. These features were then given to the Optimized Weight Elman Neural Network (OWENN) classifier, which identified areas with higher traffic density. This model achieved a superior F-score of 96.69%, outperforming existing methods. Yet this model increased the vehicles’ waiting time, leading to longer queues at intersections.
A Deep Reinforcement Learning (DRL) approach for TS control was demonstrated in [
23]. This methodology involved designing consistent state and reward pairs of queue length, number of vehicles, and waiting time. By interacting with synthetic traffic scenarios, the agent learned optimal TS phases. The presented approach achieved faster training convergence and stability. As this model fixed the green light duration, the overall efficiency was reduced.
An efficient framework for adaptive TS control using decentralized learning was established in [
24]. This framework utilized an Asymmetric Advantage Actor–Critic (Asym-A2C) algorithm for TSO, followed by coordinated multi-agent control facilitation. As per the experimental analysis, the presented method outperformed existing methods across various traffic demands, penetration rates, and network sizes. This model caused an uneven distribution of traffic flow due to the high density of connected vehicles.
A human-centric DRL model for decentralized adaptive TS control to incentivize ridesharing was presented in [
25]. To prioritize High-Occupancy Vehicles (HOVs), person-level pressure was employed, followed by model enhancement based on Reinforcement Learning and Planning (RLAP). As per the results, the HumanLight model achieved up to a 55% reduction in person delays and queues. Yet excluding the pedestrian waiting time from the reward function might result in increased delays for pedestrians at intersections.
A model for Connected Autonomous Vehicles (CAVs) and cooperative control of traffic light signals using DRL was investigated in [
26]. Initially, to enable decentralized cooperation, action-independent Multi-Agent Reinforcement Learning (MARL) was employed, followed by agent training using Proximal Policy Optimization (PPO). Then, lightweight state information was exchanged, achieving a 30% reduction in travel time and emissions while improving traffic safety. Yet, this model was sensitive to tuning of the hyperparameters, which affected training stability and performance consistency.
A framework for traffic flow detection employing ML methods and camera images in Intelligent Transportation Systems (ITSs) was established in [
27]. A Raspberry Pi-mounted camera captured traffic video, and a sound meter measured ambient noise. Next, You Only Look Once version-2 (YOLOv2) detected and classified vehicles. To estimate noise levels and vehicle counts, traffic flow data were used. Also, the ML improved vehicle classification and traffic data generated noise maps. Therefore, the ITS supported targeted noise mitigation. Yet YOLOv2 struggled with detecting objects of different sizes.
A methodology for analyzing the traffic flow using video image recognition based on DL was discussed in [
28]. Primarily, by using the multi-target tracking algorithm, the vehicles were detected and tracked. Next, to recognize spatiotemporal counting features, an improved Long Short-Term Memory (LSTM) was introduced, attaining 97.62% accuracy. Yet, this model failed to consider some inference factors like overtaking, speeding, mixed traffic flow of motor vehicles, etc., thus limiting overall performance.
A controlling method to optimize TSs centered on the Attention Mechanism, Updated Weights Double Deep Q Network (AMUW-DDQN), was described in [
29]. Initially, by using Discrete Traffic State Encoding (DTSE), this model captured real-time traffic data, followed by agent selection and traffic flow efficiency optimization. Lastly, to enhance the model’s ability, the Squeeze and Excitation Networks (SENets) attention mechanism was incorporated, improving action evaluation accuracy. This model had high computational complexity owing to the utilization of a large number of intersections.
A framework for TS optimization at urban intersections via controlling TS coordination was exhibited in [
30]. Here, to maximize intersection capacity, minimize vehicle delay, and reduce congestion, the multi-objective traffic optimization model was developed. Moreover, by using fuzzy logic, the TSs were dynamically adjusted, followed by parameter fine-tuning using the Differential Evolution Algorithm (DEA). As per the results, this framework attained a 55.4% promotion rate. Yet this model failed to incorporate interdisciplinary collaboration with traffic control and guidance systems, limiting traffic efficiency.
An adaptive–predictive controller for TS optimization in larger-scale urban road networks was utilized in [
31]. Initially, the vehicle information was collected from the traffic system, followed by future traffic condition prediction and optimization problem formulation. Then, near-optimal solutions were found for TS control using quantum annealing and other Ising solvers. As per the results, this model predicted traffic conditions effectively while reducing the waiting vehicle ratio to 60%. This model was inaccurate in TSO due to the reliance on a constant flow rate.
The application of fuzzy logic for the evaluation of Stone Mastic Asphalt (SMA) was investigated in [
32]. SMA served as a resilient module during heavy traffic conditions on the roadside. Here, the fuzzy logic utilized weighted average operations to evaluate performance characteristics like air voids, bulk density, and the permeability coefficient. This framework had higher prominence in controlling road traffic. But this model was specifically designed to support small-scale networks.
An effective traffic control prediction framework using fuzzy logic was implemented in [
33]. Here, a stable Takagi–Sugeno (TS) fuzzy controller was employed to maintain urban traffic. State-space dynamics was used to decide the vehicle’s average waiting time at an isolated intersection. Moreover, the Lyapunov theorem was utilized to ensure the stability of the system. This approach prominently improved the performance of the road intersection. However, this methodology required a considerable amount of processing time.
Freeway traffic control with adjacent arterial traffic analysis based on Q-learning was proposed in [
34]. The Q-learning-based freeway traffic control strategy was designed by considering factors like variable speed limit, lane change control, and ramp metering. Here, the signal timing and demands of adjacent arterial intersections were assumed as state variables. This approach significantly stabilized the vehicle density and reduced the travel time. Nevertheless, this framework had a maximum risk of suboptimal signal timing.
Lane priority-aware multi-agent approach-based diverse traffic environment maintenance was implemented in [
35]. This suggested model enabled fair utilization of priority lanes by considering factors like driving comfort, traffic efficiency, and safety. This methodology had an impressive performance in traffic monitoring. However, this model failed to mitigate the formation of long queues, thus affecting the model’s resilience.
Emergence-aware optimal communication infrastructure for traffic congestion control using reinforcement learning and a non-dominated sorting genetic algorithm was employed in [
36]. An adaptive Q-learning strategy was employed to improve the traffic maintenance via an emergency-aware module. The emergency-aware module utilized real-time data to prioritize emergency vehicles and adjust traffic signals in an effective way. Nevertheless, this approach had scalability issues due to the large urban environments.
An effective freeway traffic control scheme based on model predictive control and deep reinforcement learning was introduced in [
37]. The hierarchical structure included a high-level control component and a low-level control component to handle the dynamic traffic conditions. This approach proficiently improved the traffic control strategies. Yet this framework had a considerable computational cost owing to its hierarchical control components.
The above-mentioned section investigated the numerous traffic control strategy frameworks in terms of their major goal, methodology, findings, and limitations. Basically, the traditional You Only Look Once version-2 (YOLOv2) [
27] was utilized to perform vehicle detection. To effectively track the vehicles in real time, a multi-target tracking algorithm was employed in the conventional approach [
28]. However, the vehicle detection frameworks struggled to detect objects of different sizes. Additionally, in the existing work, OWENN was employed to identify the higher traffic density with a 96.69% F-score [
22]. Furthermore, an improved LSTM was utilized in the existing work to analyze the traffic flow through image recognition. Nevertheless, the aforementioned scheme did not pay direct attention to important factors, such as speed, overtaking, and mixed traffic flow, reducing the overall efficiency. To enable adaptive traffic control, a MARL was introduced in the prevailing schemes [
26]. In the same manner, ref. [
31] established quantum annealing and various Ising solvers to obtain optimal solutions for traffic strategy control. Some of the existing methods utilize fuzzy logic to dynamically adjust the traffic flow. Likewise, ref. [
36] established a reinforcement learning and non-dominated sorting genetic algorithm to handle dynamic traffic conditions. In the same way, ref. [
37] employed adaptive reinforcement learning to ensure freeway traffic control. But the existing studies had limited traffic efficiency due to the lack of collaboration with traffic control and guidance systems. Overall, the existing methods improved the efficiency and stability of the traffic control strategies. However, the traditional frameworks faced several challenges related to the optimal traffic control strategy design. Most of the existing work had considerable vehicle waiting time, thus resulting in vehicle congestion at intersections. Owing to the fixed or static green light duration, the prior frameworks had maximum delay and minimum efficiency. Moreover, the prevailing approaches did not focus on pedestrians, cyclists, or other non-motorized road users, thus affecting the performance and consistency of the traffic strategy optimization. Thus, the research gaps identified in the existing studies are discussed further.
Traditional methods like fixed-time signal plans and TOD control failed to adapt to real-time traffic fluctuations, thus causing suboptimal performance during dynamic conditions. Further, many of the traditional machine learning-based approaches primarily depend on vehicle flow rather than concentrating on the fundamental road users, such as pedestrians, cyclists, and emergency vehicles. Also, an integrated framework that combined object detection, traffic flow analysis, and intensity estimation to offer data-driven decisions was rarely concentrated in the prevailing approaches. Moreover, the computational complexity and scalability are the major concerns for some of the AI-based traffic control systems. Hence, a multi-object-aware and computationally efficient traffic signal optimization framework is required to handle heterogeneous and unpredictable traffic patterns.
Accordingly, the proposed work is designed well enough to mitigate the problems faced in the existing works. In the proposed work, a multi-objective-based effective TSO scheme is implemented through traffic flow analysis and intensity estimation using UCB-MRL-CSFL. The proposed UCB-MRL-CSFL approach integrates multi-agent reinforcement learning, fuzzy logic, and advanced vision-based analysis for real-time and adaptive traffic control. Here, the proposed methodology encompasses fundamental innovations like multi-object detection, real-time traffic flow analysis, intensity estimation, and adaptive traffic signal optimization. Thus, the fusion of optical flow analysis and multi-agent reinforcement learning with fuzzy logic ensures high computational efficiency and adaptability to real-world traffic conditions.
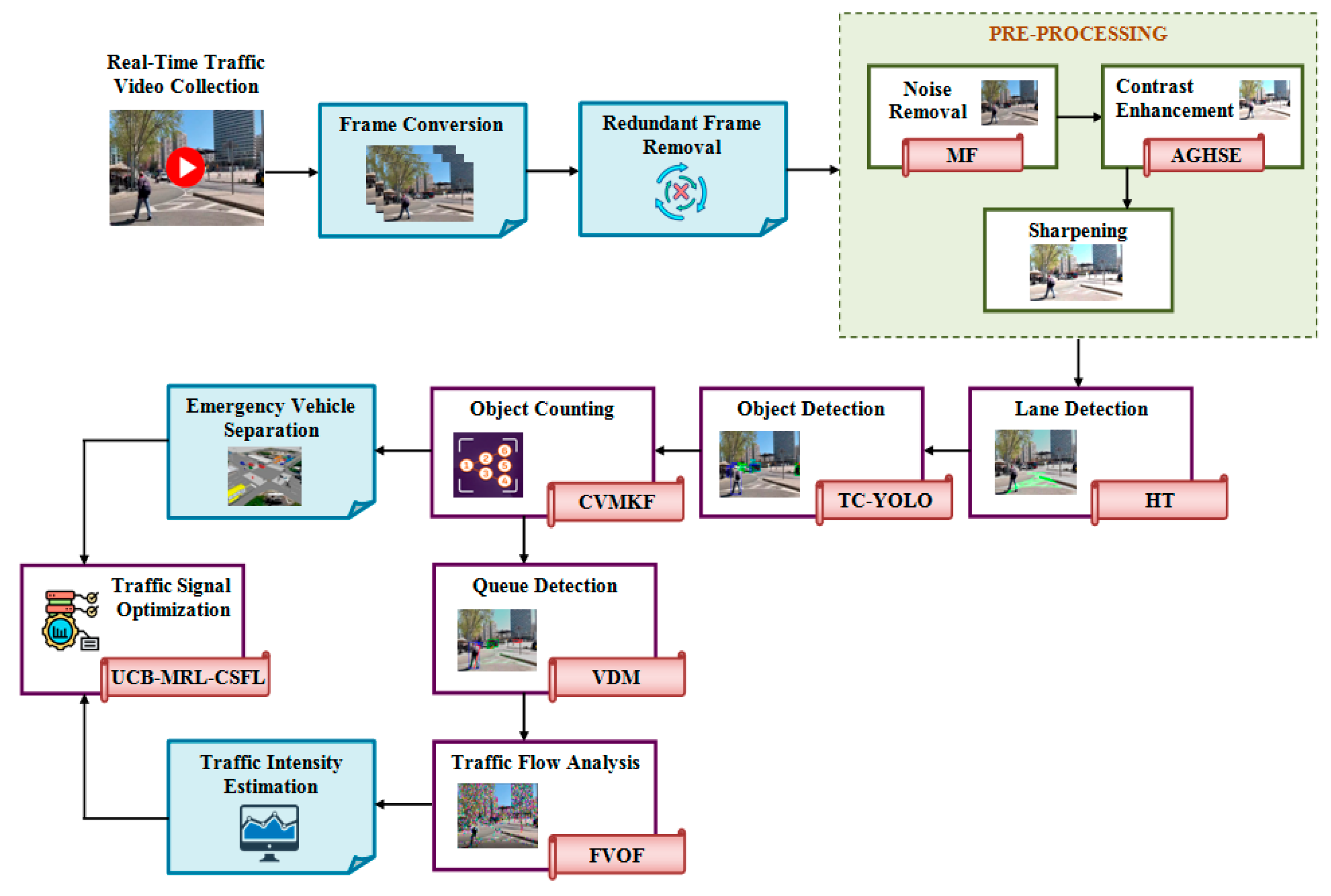
3. Proposed Methodology for the Efficient Multi-Object-Based Traffic Flow Analysis and Intensity Estimation Model for TSO
Here, the proposed methodology for the effective TSO model based on multi-object via traffic flow analysis and intensity estimation using UCB-MRL-CSFL is demonstrated. This framework mainly concentrates on enhancing TSO by focusing not only on the traffic flow but also on pedestrians, cyclists, and other non-motorized road users. The research methodology employs a reinforcement learning-based framework, which supports varying traffic conditions, including free-flow, moderate, and congested scenarios. In
Figure 1, the proposed framework’s structural diagram is illustrated.
3.1. Real-Time Traffic Video Collection
Primarily, the real-time traffic video samples are collected from publicly accessible sources for efficient TSO.
Here, demonstrates the maximum number of collected video samples . Now, are transferred to the cloud for real-time TSO.
3.2. Frame Conversion
Then, the frame conversion is involved to decompose
into a sequence of frames for accurate traffic flow analysis and object detection, leading to faster convergence. Here, each
is divided into a continuous set of image frames
.
Here, represents the maximum number of .
3.3. Redundant Frame Removal
Now, the redundant frames are removed from
to ensure efficient processing and reduce computational overhead. Redundant frames
are duplicate frames of the original frame that have minimal or no changes.
where
portrays the redundant frames removed frame set.
3.4. Preprocessing
Now, often contains various imperfections, such as noise, lighting variations, and motion blur, affecting the accuracy of object detection for efficient TSO. Thus, preprocessing steps like noise removal, contrast enhancement, and sharpening are carried out for each , enhancing the image quality for better signal optimization.
Noise removal: Initially, the quality of each
is enhanced by removing the unwanted random variations in image pixels
using a Median Filter (MF). The MF replaces each
of
with the median value
in its neighborhood, removing noise while maintaining the original sharpness of the edges.
Here, and show the noise-removed frames and coordinates of , respectively.
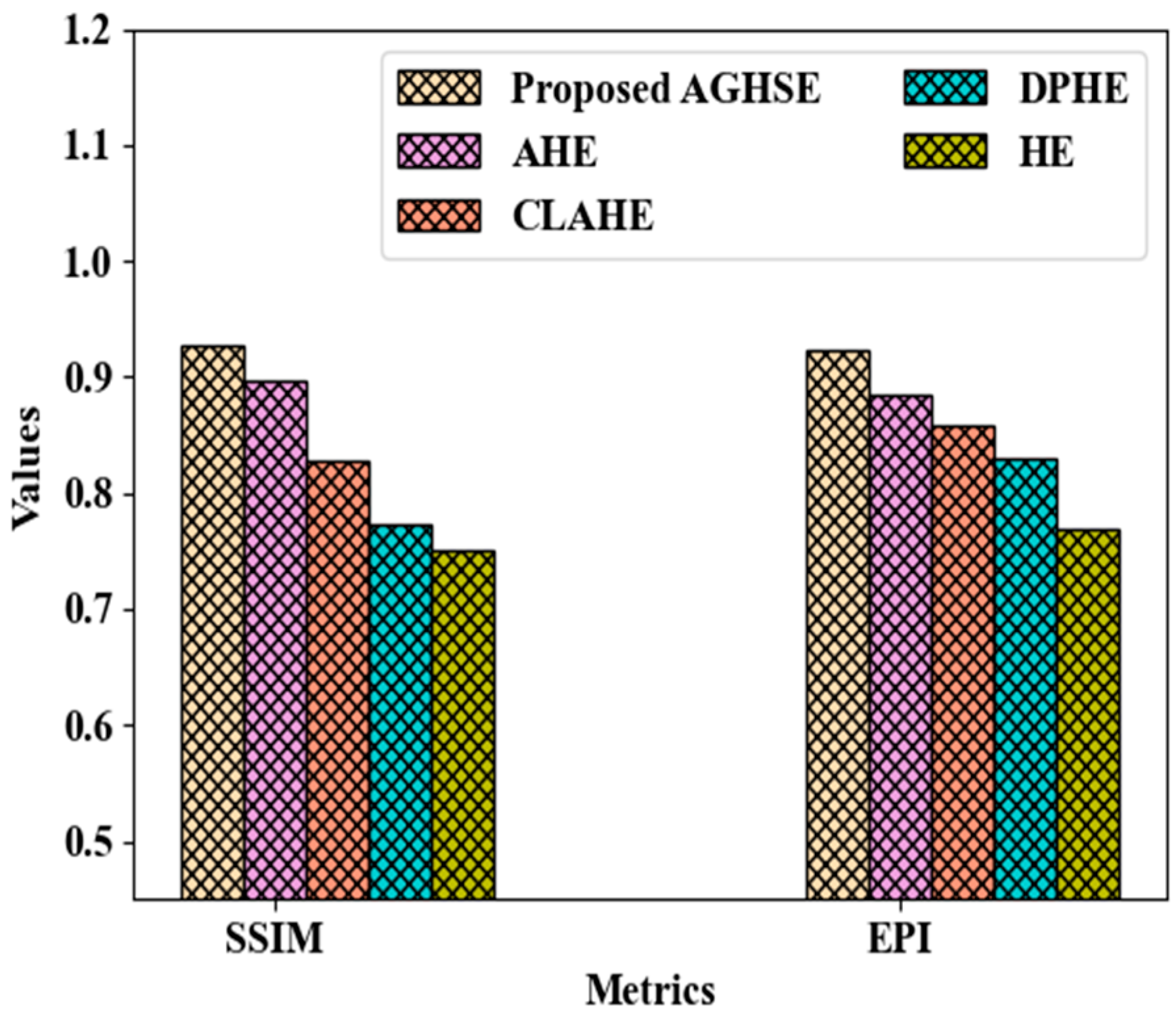
Contrast Enhancement: Then, the Adaptive Gaussian Histogram Smoothing Equalization (AGHSE) is used to improve the visibility of each for accurate object detection and tracking in video analysis. Conventional Adaptive Histogram Equalization (AHE) enhances the contrast of video frames by focusing mainly on the local region of the image instead of the entire frame, improving the contrast in areas that are too dark or too light while preserving the natural appearance of other areas. Yet it adjusts pixel intensities in local regions and abrupt transitions between regions, causing unnatural visual effects like halos around bright objects. Thus, to address the above-mentioned limitation, Gaussian Smoothing of Local Contrast Map (GSLCM) is introduced. The GSLCM helps to reduce the likelihood of harsh transitions or halos around high-contrast edges by smoothing the contrast difference between adjacent regions.
where
demonstrates the grayscale-converted grids.
Here, portrays the maximum number of pixels .
The GSLCM is applied based on
to redistribute
with each
, reducing the halos effect and smoothing edges.
where and specify the mapped grids and standard deviation, respectively.
Therefore, AGHSE enhances the contrast for each while preserving important information for effective TSO and object detection.
Sharpening: lastly, sharpening is applied to enhance the fine details in each
, increasing edge clarity and obtaining preprocessed frames
.
Here, establishes the maximum number of . Therefore, the proposed framework improves the frame quality for accurate detection of vehicles, pedestrians, and cyclists during traffic flow analysis by using enhanced preprocessing approaches.
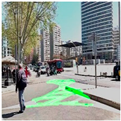
3.5. Lane Detection
Now, the lanes are detected from to accurately identify the driving lanes on the road using the Hough Transform (HT) for structured traffic flow analysis and TSO. The HT is a powerful technique used to identify lines, which represent lane marking in road images. Also, it can detect lanes accurately even in challenging conditions like low lighting or varying road textures.
Initially, the edges
of each
are detected; also, the parameter space is defined in terms of polar coordinates
to detect lines. Here,
are defined by the perpendicular distance from the origin to the line in
and an angle, respectively. Then, the equation for the detected line is depicted as
Then, the corresponding value of is calculated for a range of , resulting in a curve in the parameter space for .
Now, the accumulator array
is updated based on
to vote possible lines in
, followed by local maxima calculation to find the peak parameter pair
of the detected line.
Lastly, the lanes are detected by reconstructing
in the image space using inverse polar transformation.
Here, represents the maximum number of lanes detected in images . Therefore, the proposed framework effectively detects the lanes for accurate object detection in estimating efficient TSO.
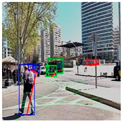
3.6. Object Detection
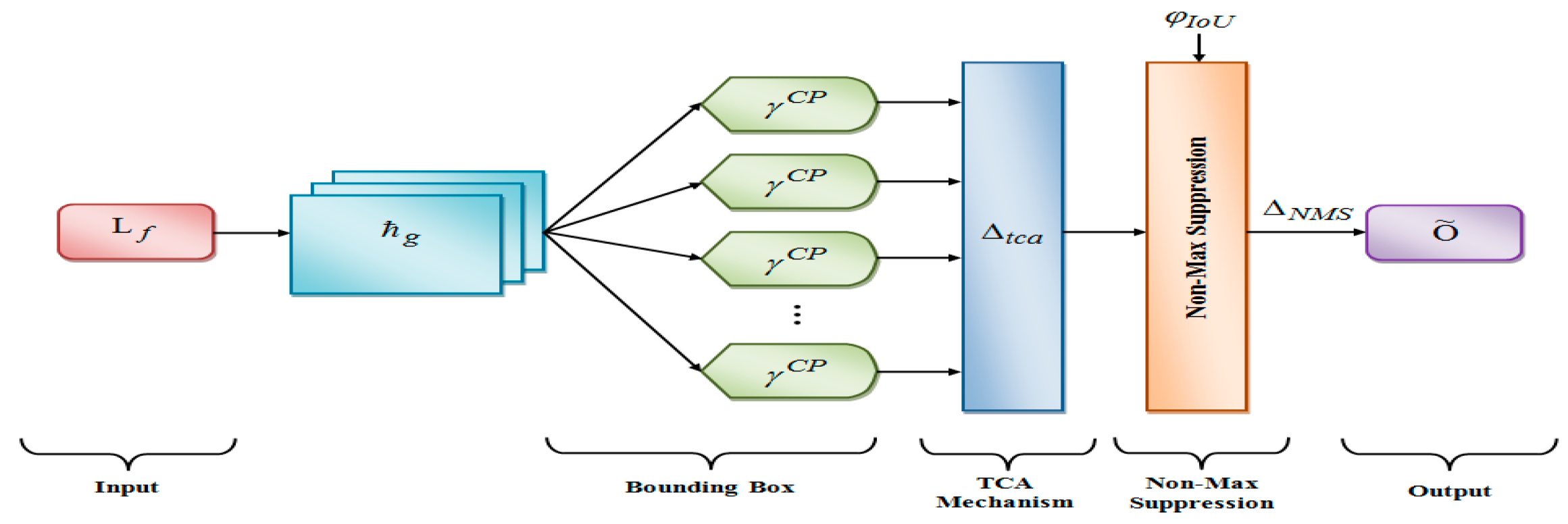
Object detection is employed to identify and locate various road users, such as vehicles, pedestrians, cyclists, and other non-motorized entities from
for efficient TSO once the lanes are detected. For this purpose, the proposed framework uses TC-YOLO. Traditional You Only Look Once (YOLO) processes the whole image in a single pass, enabling real-time object detection and overlapping objects [
38]. Likewise, it employs a regression-centric approach to improve the accuracy of bounding box predictions, resulting in precise object localization. However, YOLO struggles to detect small objects in images or video frames, particularly when they are located in crowded scenes. Therefore, the Temporal Context Attention (TCA) mechanism is introduced to detect smaller objects. TCA helps YOLO to identify small objects even if they are occluded or difficult to detect in single frames by focusing on regions in which small objects are moving over time. In
Figure 2, the TC-YOLO classifier’s diagram is depicted.
where
and
represent the intersection over the union operation and the weight value of TCA, correspondingly.
Lastly, the objects in the lanes like vehicles, pedestrians, cyclists, and other non-motorized entities are detected accurately based on . Next, the detected objects are indicated as .
The pseudo-code for the TC-YOLO is depicted as follows.
| Pseudo-code for the proposed TC-YOLO |
Output: Object detected frames |
Begin
do
Calculate class probabilities
Detect small objects #Using TCA
#using non-max suppression
End For
End While
Return:
End |
Therefore, the TC-YOLO not only accurately detects objects in each lane but also detects small objects and partially occluded road users to estimate efficient TSO.
3.7. Object Counting
The proposed framework counts and tracks the number of objects from in each lane for analyzing traffic flow and estimating traffic intensity efficiently using the CVMKF. The prevailing Kalman Filter (KF) helps to predict the next state of vehicles based on their current and past states, reducing the risk of misidentification or loss of track, particularly in high-traffic scenarios. The KF’s predictions may be biased and inaccurate owing to the reliance on accurate initial state estimates at the start of the tracking process. Therefore, the Cumulative Vehicle Motion (CVM) is applied over a short period for initial velocity estimation. The CVM results in better initial tracking and provides precise predictions about the vehicles’ position, improving the overall tracking process.
Chiefly, from
, initial velocity
over a short period
is estimated using the CVM, followed by system state
and system state error covariance
initialization. In basic, velocity is measured in meters per second (m/s).
Here,
and
portray the maximum number of
and
, respectively, and
and
exemplify the transformation matrix and index of
, correspondingly. Now,
and
are predicted based on
to count and track objects.
where
signify the predicted
and
, respectively,
illustrate the state transition matrix and control input matrix, correspondingly,
indicates the transpose function, and
depict the control vector and process noise covariance, respectively. Next, the Kalman gain
is calculated to minimize the estimation error for accurate object counting.
where
and
designate the measurement matrix and covariance matrix, correspondingly. Lastly, by estimating
and
, the objects counted and tracked frames
are obtained based on
.
where
and
signify
and
estimated using
, respectively, and
illustrates the maximum number of
. Thus, the proposed framework effectively counts and tracks the objects that are present in each lane based on
and
, thereby enabling accurate traffic flow analysis and intensity estimation of efficient TSO.
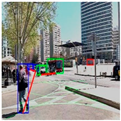
3.8. Queue Detection
Then, the formations of vehicle queues are identified from to analyze congestion levels and optimizing TSs dynamically using Vehicle Density Mapping (VDM). The VMD helps to accurately identify traffic congestion and queues in real time by providing a spatial representation of the vehicle concentration for each lane.
Initially, the Region of Interest (ROI)
is defined for each
to extract vehicle positions, followed by vehicle density
computation. Here, vehicle position is measured in meters (m), and vehicle density is quantified as vehicles per kilometer.
Here,
and
represent the top-left corner and bottom-right corner coordinates of
, respectively, and
illustrates the area of
. Essentially, the area is measured in square kilometers (km
2). Now, based on
, the queue
is detected, followed by queue length
estimation. Thus, the queue length is measured in meters (m).
where
and
represent the maximum number of queued vehicles and the average length of vehicles in
, respectively. Lastly, by generating a spatial vehicle density map from
, the queue-detected frames
are obtained, providing a real-time visualization of traffic congestion levels for efficient TSO.
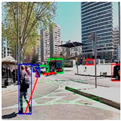
3.9. Traffic Flow Analysis
Now, to understand the movement patterns of vehicles, pedestrians, cyclists, and other non-motorized road users across various lanes, the traffic flow is analyzed from for effective TSO. For this purpose, the proposed framework uses FVOF. The conventional Optical Flow (OF) provides real-time updates on vehicle speeds and traffic density, enabling it to handle complex traffic scenarios like crowded scenes and varied vehicle types. However, if vehicles are blocked by another vehicle or an object, then they struggle with occlusions and may misinterpret motion or fail to track individual vehicles. Therefore, feature detectors like Harris corner detection, Scale-Invariant Feature Transform (SIFT), and Speeded Up Robust Features (SURF) are utilized to track key features of vehicles across frames, detecting potential occlusions based on the change in visual features between consecutive frames.
Primarily, the key features
like Harris corner detection, SIFT, and SURF are extracted from
, followed by the brightness constancy assumption for each
.
where
shows the
frame gradient at the
location,
exemplify the spatial coordinates of
, and
notate the displacement vectors (unit—meters) of
. Now, the optical flow constraint equation is obtained by using the first-order Taylor series expansion to estimate the dense motion field.
Lastly, this constraint is applied to all to compute their motion vector. The resulting dense motion field is used to generate traffic flow analyzed frames . Thus, the proposed framework effectively analyzes the traffic flow, thereby allowing a better understanding of the movement patterns of vehicles, pedestrians, and other non-motorized road users.
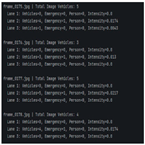
3.10. Traffic Intensity Estimation
After analyzing the traffic flow, the traffic intensity is estimated for a dynamic and efficient TSO based on
. The traffic intensity represents the number of vehicles and other road users passing through each lane over a specific
. Here, the traffic intensity is quantified as vehicles per hour or time.
Here, portrays the number of objects in and demonstrates the estimated traffic intensity. The proposed framework can assess the real-time traffic load in each lane by calculating the traffic intensity, thereby enabling dynamic adjustment of TSs to reduce congestion and optimize traffic flow. The integration of traffic intensity into the decision-making process enhances the adaptability of the traffic control system.
3.11. Emergency Vehicle Separation
Now, the emergency vehicles on the road are separated based on the siren flashlight colors from
, enhancing public safety and system responsiveness. Thus, the proposed model uses the color segmentation-based approach to identify emergency vehicles, such as ambulances, fire trucks, and police vehicles, which typically use red and blue siren lights. Here,
are transformed in Hue, Saturation, and Value (HSV) color space to extract red and blue regions.
Here,
implies the HSV color-spaced frames. Next, to recognize the shape of a fire truck or ambulance, contour detection is applied. Now, ordinary vehicles
with red or blue reflections are filtered out by analyzing the area, shape, and size (unit –square meters) of the vehicles. Lastly, the detected emergency vehicles are separated from
.
where
validates the emergency vehicles presented images. Therefore, the proposed framework efficiently separates emergency vehicles, contributing to safer and more responsive TS controls.
3.12. Traffic Signal Optimization
Lastly, the proposed framework optimizes the TSs using the UCB-MRK-CSFL based on
and
and the pedestrian information
from
. Conventional Fuzzy Logic (FL) effectively handles imprecise and uncertain information, allowing for smooth decision-making in ambiguous environments [
39]. Yet it lacks adaptability in highly dynamic and distributed systems, where traffic conditions fluctuate rapidly. Thus, MARL is incorporated with the fuzzy logic system, which is a decision-making system that allows for smooth, continuous control of TSs and prevents abrupt changes [
40]. It enables more nuanced actions and allows for more fine-grained control over signal timing, leading to better traffic flow and fewer disruptions. Yet, it is prone to non-stationary due to the interactions of multiple agents, making it difficult for agents to converge on an optimal solution, particularly when there is a high variability in traffic patterns. Therefore, the Upper Confidence Bound (UCB) strategy is applied to balance exploration and exploitation during the learning phase, adapting to the dynamic nature of the traffic system. Likewise, the Cubic Spline (CS) membership function is applied in fuzzy logic to accurately model complex, multimodal, or non-linear relationships between the input variables and membership grades.
The proposed UCB-MRL-CSFL approach incorporates the presence of non-motorized road users into the traffic optimization process. Also, the detected pedestrians and cyclists are included in the system’s state representation, allowing the agents to consider their density and wait times. Moreover, the reward function is designed to penalize excessive delays for non-motorized users, thereby allocating the fair signal timing across all user types. Furthermore, fuzzy logic rules are applied to dynamically prioritize the users based on real-time conditions, ensuring adaptive traffic signal control. The detailed modeling of the proposed UCB-MRL-CSFL is given below.
Primarily, the traffic network is modeled with the
number of agents
from
,
, and
using the Markov game. Here, each traffic signal is treated as an agent in a multi-agent environment. Each agent observes the current state and selects a suitable action. Then, the agent receives a reward based on traffic efficiency and non-motorized user satisfaction.
Here,
,
, and
represent the action space, transition probability function, and reward function for
, respectively. Here, the action space includes changing signal phase, extending green time, prioritizing a specific lane, extending pedestrian crossing time, prioritizing walk signals, and allocating exclusive pedestrian phases. Therefore, the agent initiates targeted actions for non-motorized users. Now,
select the actions
using UBC, handling the non-stationary environment by balancing both exploration and exploitation.
where
,
,
, and
demonstrate the mean reward of
, tunable constant, number of selections across all actions by
, and the number of times that particular action is selected, correspondingly.
The state space includes traffic density, queue length, object count (vehicles, pedestrians, and cyclists), and emergency vehicle presence for each lane. Here, the state space ensures that the agent’s perception includes all types of road user.
The modeled network transitions to new states to receive corresponding rewards based on
. This reward is used to update each
. Thus, a reward signal aids in penalizing congestion, long queues, and non-motorized user delays. Agents learn a near-optimal policy over time for adaptive traffic signal control. Next, by using the CS membership function, the updated agents
are converted into fuzzy sets
.
where
illustrate the parameters of
.
Now, the fuzzy rules
are created from
to optimize TSs.
where
and
validate the emergency vehicles and pedestrians, correspondingly.
gets a green signal as the first priority if the lane
with
is detected. The green signal is activated as the second priority if
with
is detected. Likewise, the green signal is activated as the third priority if
with high
is detected.
Next, the inference system calculates the inferred data
based on
for efficient TSO.
Lastly, the TS-optimized results are obtained by performing the defuzzification process
.
The TSs are effectively optimized by dynamically adjusting the green, yellow, and red timing centered on by using the UCB-MRL-CSFL.
The pseudo-code for the UCB-MRL-CSFL is depicted as follows.
| Pseudo-code for the proposed UCB-MRL-CSFL |
Input: Pedestrian information , estimated intensity , and emergency vehicle-separated images
Output: Optimized traffic signals |
Begin
Initialize , , , , iteration , and maximum iteration
Set
While
For each , and do
Model traffic network #with agents
Select actions #Using UBC
Update
Use CS membership function
Apply fuzzy rule
If
{
}
Else If
{
}
Else If
{
}
Else
{
}
End If
Calculate
Perform Defuzzification
End For
End While
Return:
End |
Reinforcement learning enables agents to continuously learn and adapt their decisions based on the dynamic environment by observing real-time traffic states and receiving feedback through the reward function. This adaptability allows the system to optimize signal timings effectively across a wide range of traffic patterns, ensuring scalable performance.
Therefore, the proposed framework effectively ensures dynamic, real-time TS optimization based on both traffic intensity and the presence of emergency vehicles, thereby reducing congestion, minimizing vehicle waiting times, and enhancing the overall efficiency and safety of road networks.
5. Conclusions
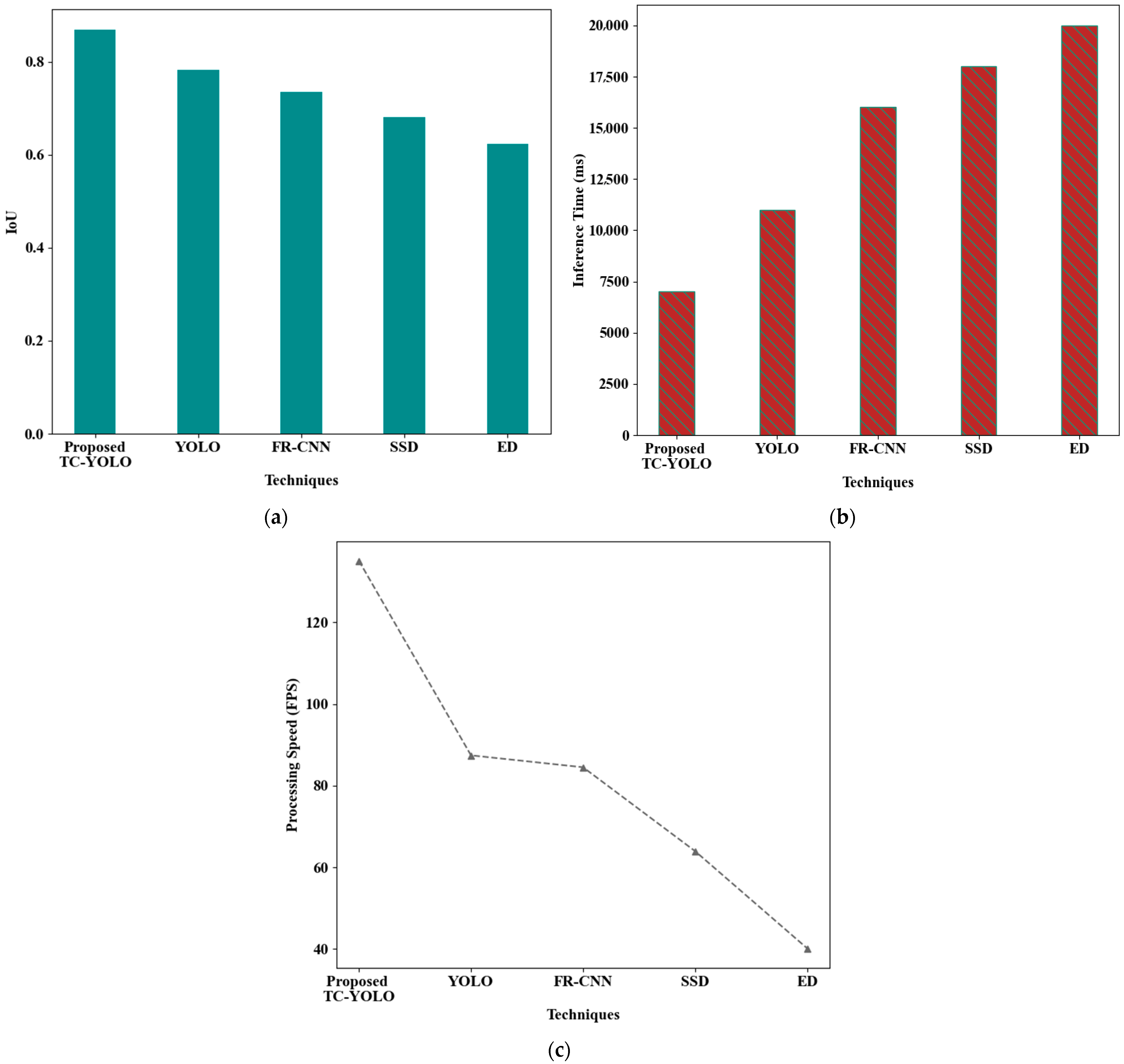
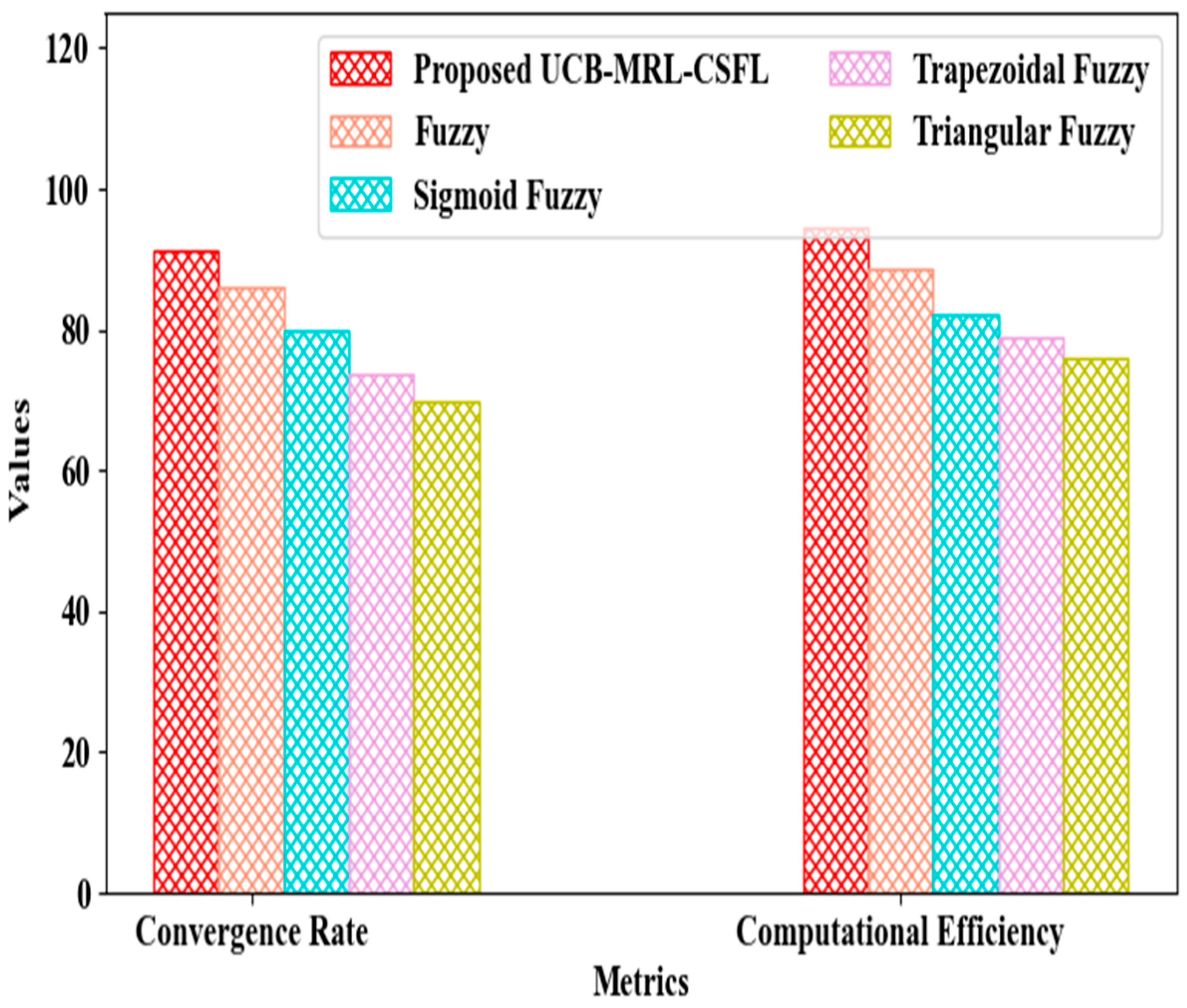
Here, a multi-object-based efficient TSO framework was proposed via an analysis of traffic flow and intensity using UCB-MRL-CSFL. This model effectively optimized the TSs not only by considering the traffic flow and intensity, but also by focusing on emergency vehicles, pedestrians, cyclists, and other non-motorized road users. Likewise, this framework accurately processed the real-time traffic surveillance video with regard to frame conversion, redundant frame removal, and preprocessing. The lanes were accurately detected, followed by object detection using TC-YOLO, which accurately detected objects like vehicles, emergency vehicles, pedestrians, cyclists, and non-motorized users with 135.081476 FPS processing time. In addition, CVMKF counted the objects in each lane, and VDM detected queues. Based on the queue, the proposed framework analyzed the traffic flow using FVOF, attaining 34.48dB SNR. Also, traffic intensity was estimated, and emergency vehicles were separated to perform TSO. Lastly, the proposed framework effectively optimized the signals based on estimated intensity, emergency vehicles, and pedestrian information using UCB-MRL-CSRL, attaining a 91.26% convergence rate. Therefore, the proposed framework provided a real-time TSO solution capable of handling complex, multimodal urban traffic scenarios.
Limitations: The proposed UCB-MRL-CSFL approach demonstrates enhanced efficiency in traffic signal optimization by integrating multi-agent reinforcement learning and fuzzy logic. However, the proposed methodology faces several constraints compared to traditional fuzzy logic systems and AI-based approaches. The proposed approach faces deployment challenges during the integration of multiple components, such as TC-YOLO-based object detection, CVMKF-based tracking, and UCB-MRL-CSFL-based decision-making. Contrarily, standard fuzzy logic systems require simple maintenance. In general, traditional AI-based systems had lightweight computations in low-resource environments. However, the reinforcement learning component requires substantial training time and high-quality data to converge to optimal policies. In real time, extending the proposed work to large-scale traffic networks with multiple intersections causes scalability issues.
Future scope: Our proposed framework overlooked environmental factors, although it performed TSO effectively by focusing on pedestrians, non-motorized road users, etc. Thus, in the future, we will present a multi-objective model that considers environmental factors like rain, snow, fog, and changes in daylight hours to enhance safety, efficiency, and sustainability in signal control strategies. Furthermore, the proposed framework will be extended to support multi-intersection coordination across smart cities. Moreover, edge computing will be integrated with the proposed work to ensure real-time scalability.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}