

Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach

Abstract
:1. Introduction
- -
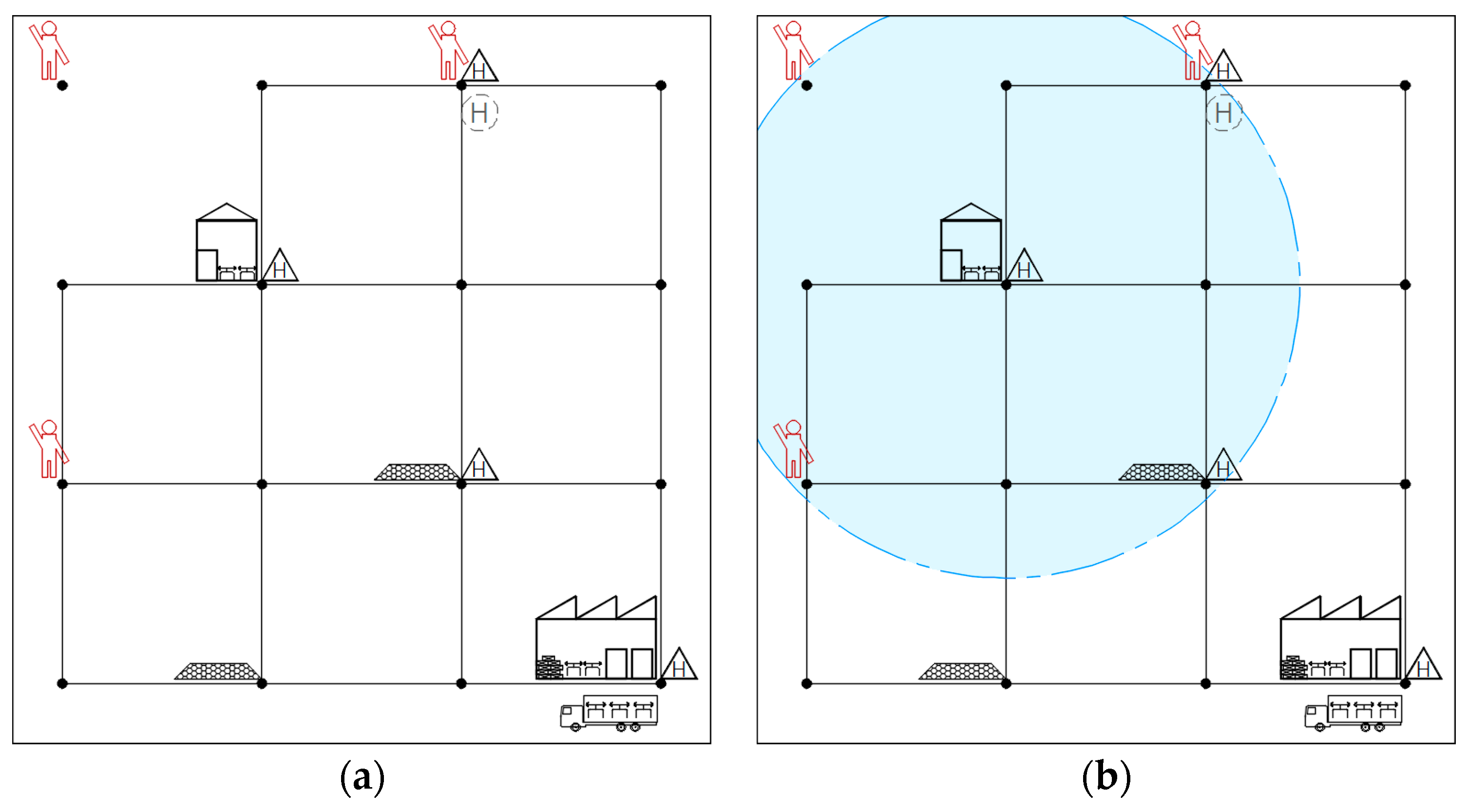
- We are proposing a mix of variable launch sites for LARO, featuring different characteristics among them. Customer locations can be used for CV-based UAV deployment, if local conditions allow (space, safety, airspace restrictions, customer approval, etc.). Virtual Hubs, for example, open spaces, parking lots, etc., can also be used for CV-based LARO. In both of those cases, the CV must wait for all its UAVs to return. UAVs can also be deployed from the Central Depot at the start, without any CV involvement, but also at the end, receiving items from the CV. Remote Depots are another facility type where the CV can leave items for UAV delivery, and LARO is performed by the depot personnel. Not all LARO locations are necessarily used.
- -
- Deliveries can be made both by CV and UAV.
- -
- The CV network is available for routing and LARO, but not all nodes and links are necessarily used. We distinguish the mandatory nodes for actions and routing after the assignment process, creating the so-called “shell network”. This allows for our model to be practically implemented with different demands and infrastructure each time.
- -
- The Assignment and Routing Optimization nested GA is developed specifically for our problem, with its two steps being interconnected and using different methods for the inner and outer GA (discrete values resulting from the service nodes for the assignment process and random keys-based ordering of nodes for routing).
- -
- We have considered the presence of Restricted Zones of any shape and size and adjusted our model to filter out non-reachable locations, either because they are in such zones or because the resulting UAV paths are longer than the UAV range allows.
- -
- We are adjusting the model, incorporating spatial and optimal path analysis with GIS as part of the methodology, and opening to modern methods and input norms.
- -
- The formulation is conveniently simplified but unique to its kind since it must address the specific setup. It creates a modular and open platform that is open to modifications, and we present all the analytical calculations involved. This also helps with strategic planning, e.g., deciding where to establish Remote Depots or Virtual Hubs, by conveniently testing alternative locations.
- -
- The consideration of all the above in a single proposed method, in a comprehensive and holistic approach.
2. Materials and Methods
2.1. General Problem Description
2.2. Assumptions and Constraints
- A single CV is available, departing from the Central Depot and attempting to deliver the items to their destinations.
- The CV is assumed to have adequate capacity for the items, and any UAVs may be needed onboard.
- Vertical Take-off and Landing (VTOL) UAVs are selected.
- Each destination can be visited once for delivery or UAV deployment (or both during the same stop) but can be accessed more than once for routing purposes.
- There is no predefined mode assignment for the items, but there is an option to force one if needed.
- There is no predefined order of visits for the destinations, but there is the option to force one if needed.
- The CD is the start and end node for the conventional vehicle tour.
- Each item is assigned to one vehicle (CV or UAV) for the final step of delivery.
- The CV can be assigned to multiple destinations.
- Each UAV has the capacity for one item.
- Each UAV can travel to and return from one destination per tour (the same UAV can be later re-deployed, but we have assumed enough UAVs for all operations anyway).
- UAVs can be deployed as a fleet from a single station.
- The launch of all UAVs from a launch site is simultaneous, but each one returns at a different time depending on the length of its tour.
- A UAV is recovered at the same location where it was launched.
- Remote Depots can deploy UAVs without the CV having to wait for their return. A certain amount of transshipment time is still required.
- The CD, used at the start of operations, can deploy UAVs without the CV having to wait, and no transshipment time is required.
- Only one transfer between vehicles is allowed per item.
2.3. Mathematical Formulation
- ‘LCVij’: length of road link between points i and j
- ‘SCV’: CV mean speed
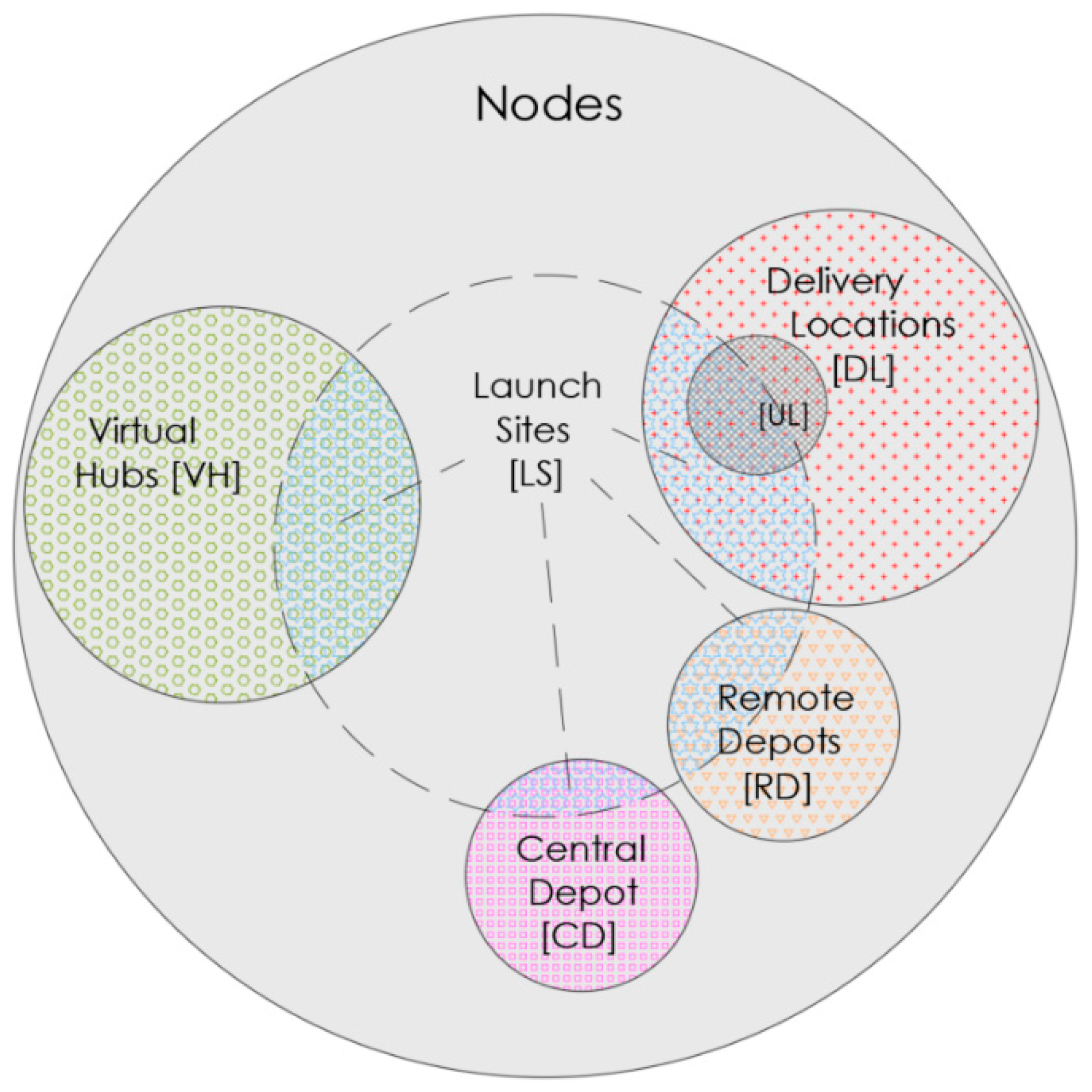
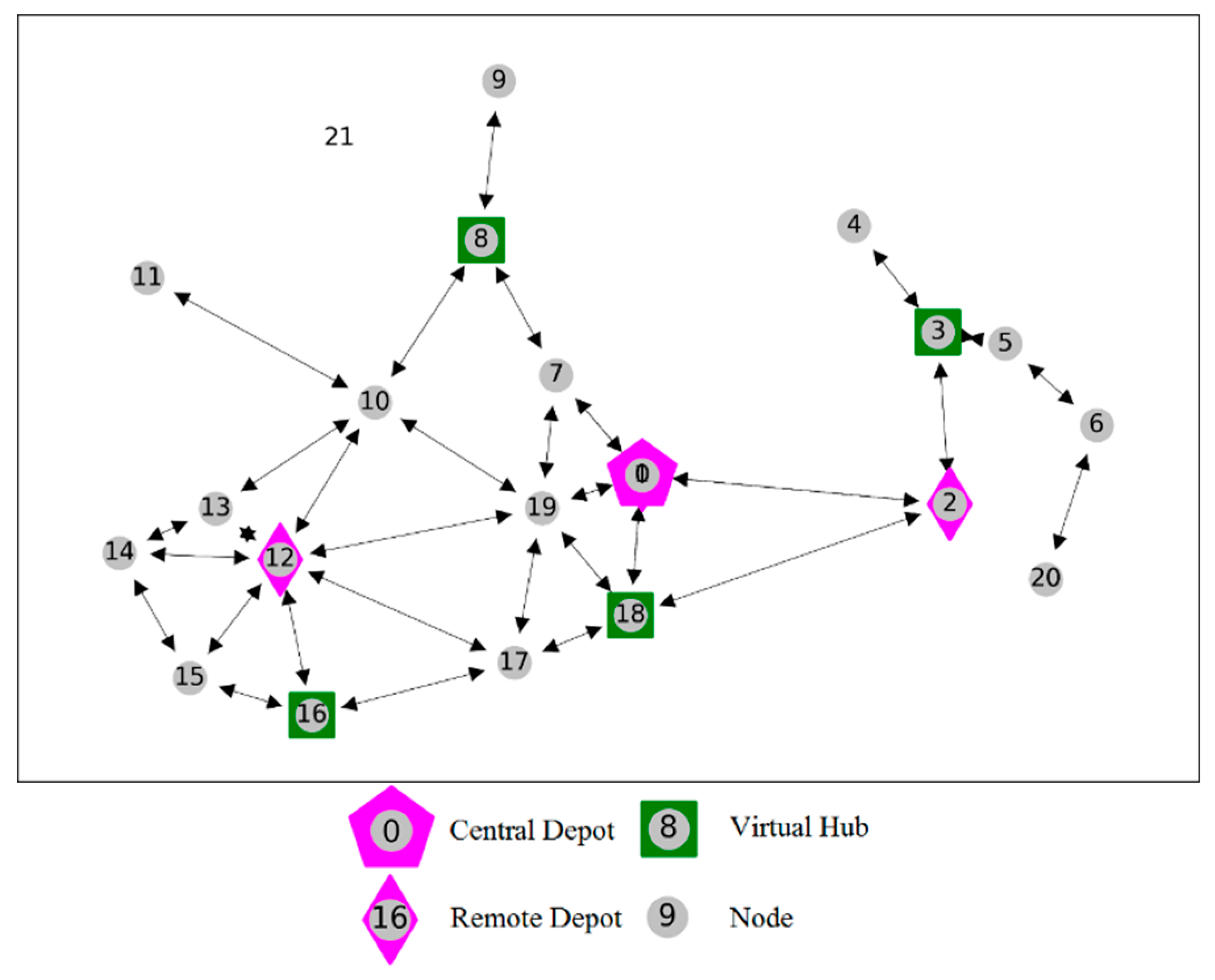
- Central Depots (CDs), forming a subset of vertices, , where . This subset here only contains one vertex, always named “0”.
- Remote Depots (RDs), forming a subset of vertices, , . An RD may be a designated location with available UAVs to deploy. As such, a Conventional Vehicle will not have to carry UAVs onboard or wait for any deployed UAVs to return.
- Virtual Hubs (VHs), forming a subset of vertices, , . A Virtual Hub is an initially designated location throughout the conventional network where conventional vehicles are allowed to deploy UAVs (e.g., parking lots, special bases for take-off and landing).
- Delivery Locations (DLs), forming a subset of vertices (, . A Customer Location is a point of demand for a specific item delivery, item collection, or service. UAV-visitable locations (UL) form an additional subset among DLs, , .
- Launch Sites (LSs), forming a subset of vertices , . A Launch Site is ultimately a location where a UAV can be launched or collected, depending on circumstances (UAV range and DL location, flight restrictions, weather, other temporary technical issues). CD, RDs, VHs, and DLs may be Launch Sites or not. A Launch Site is an “allowed” site for launch or collection.
- ‘LUAVij’: distance between points i and j
- ‘SUAV’: UAV mean flight speed
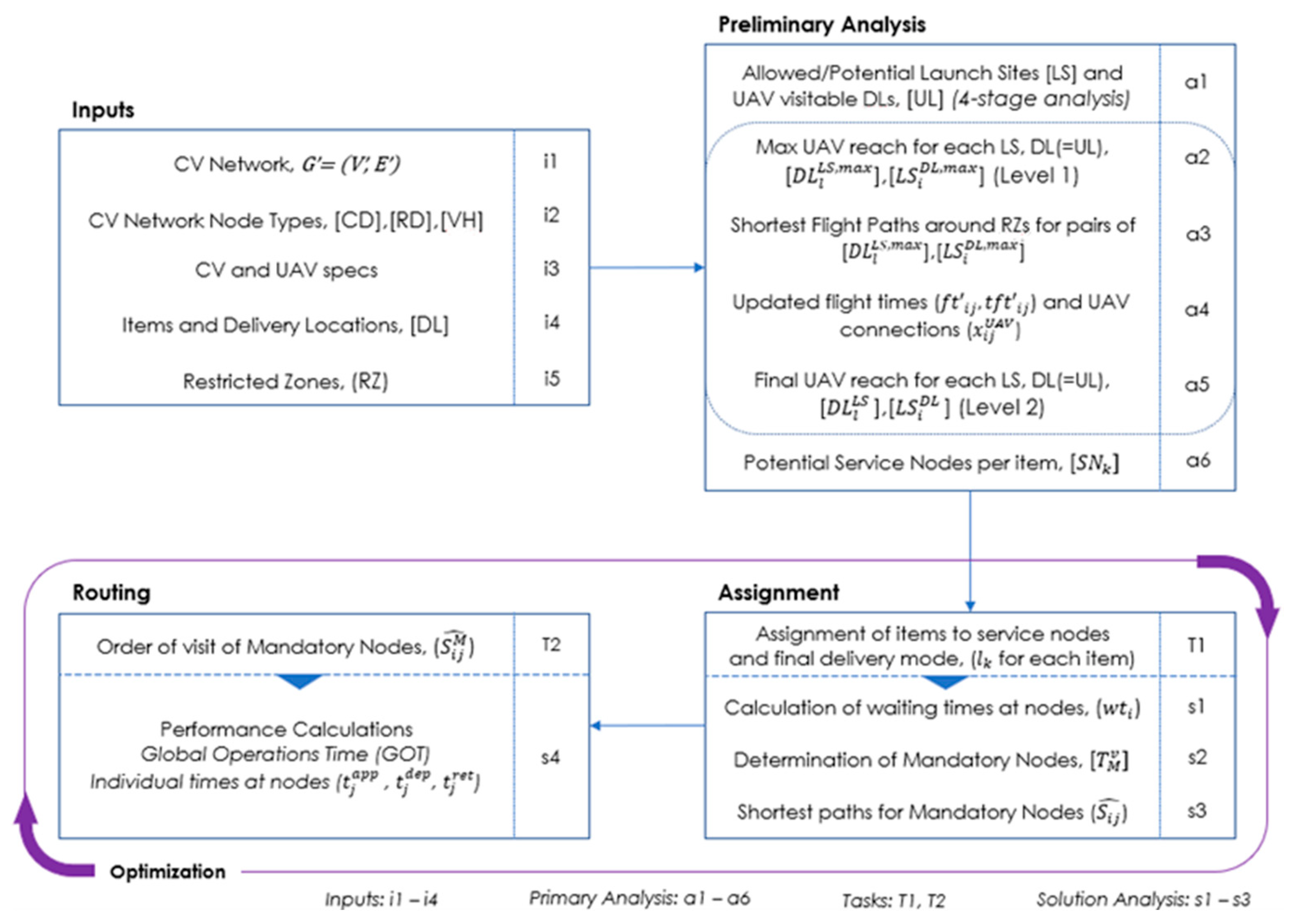
2.4. Preliminary Analysis
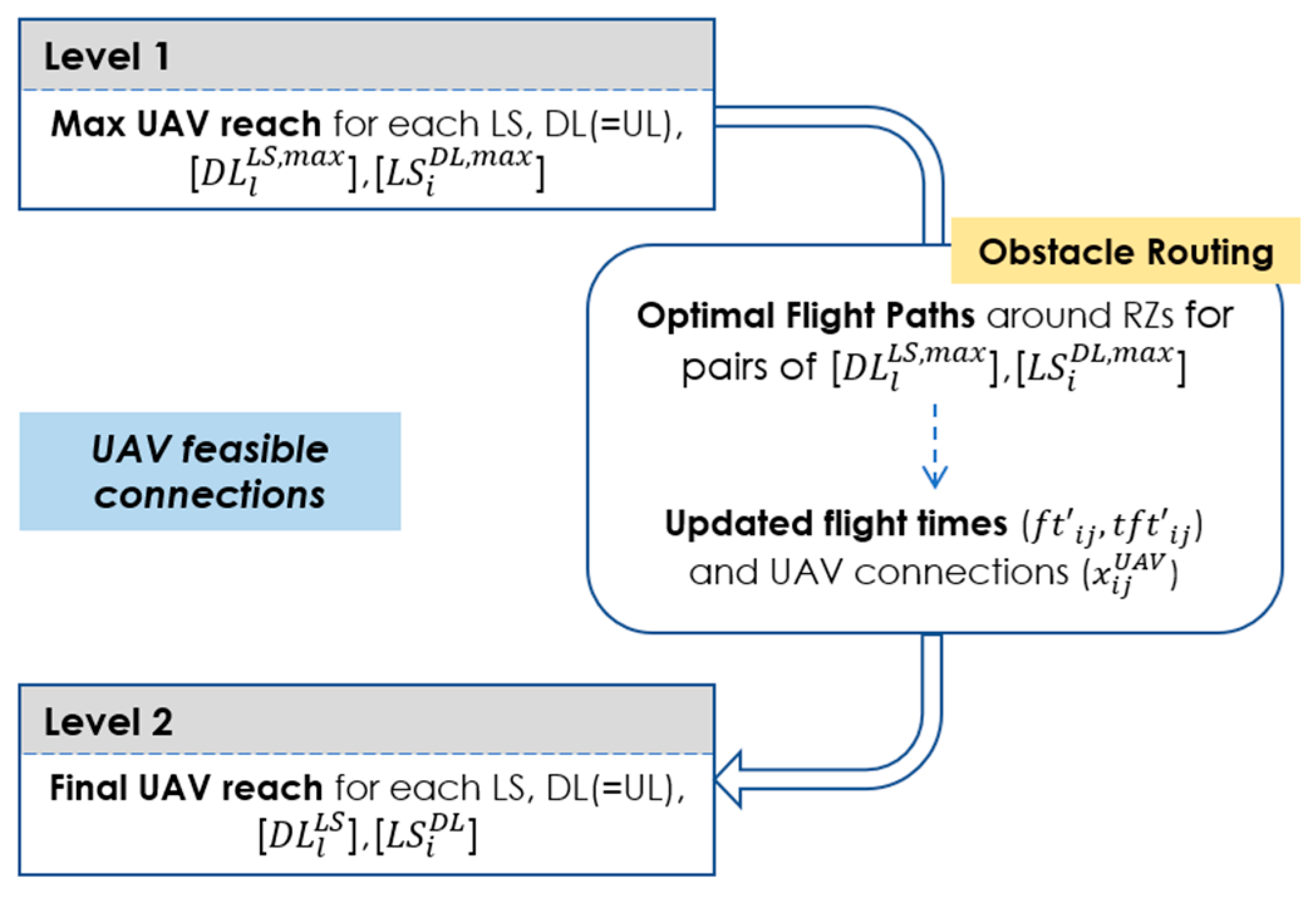
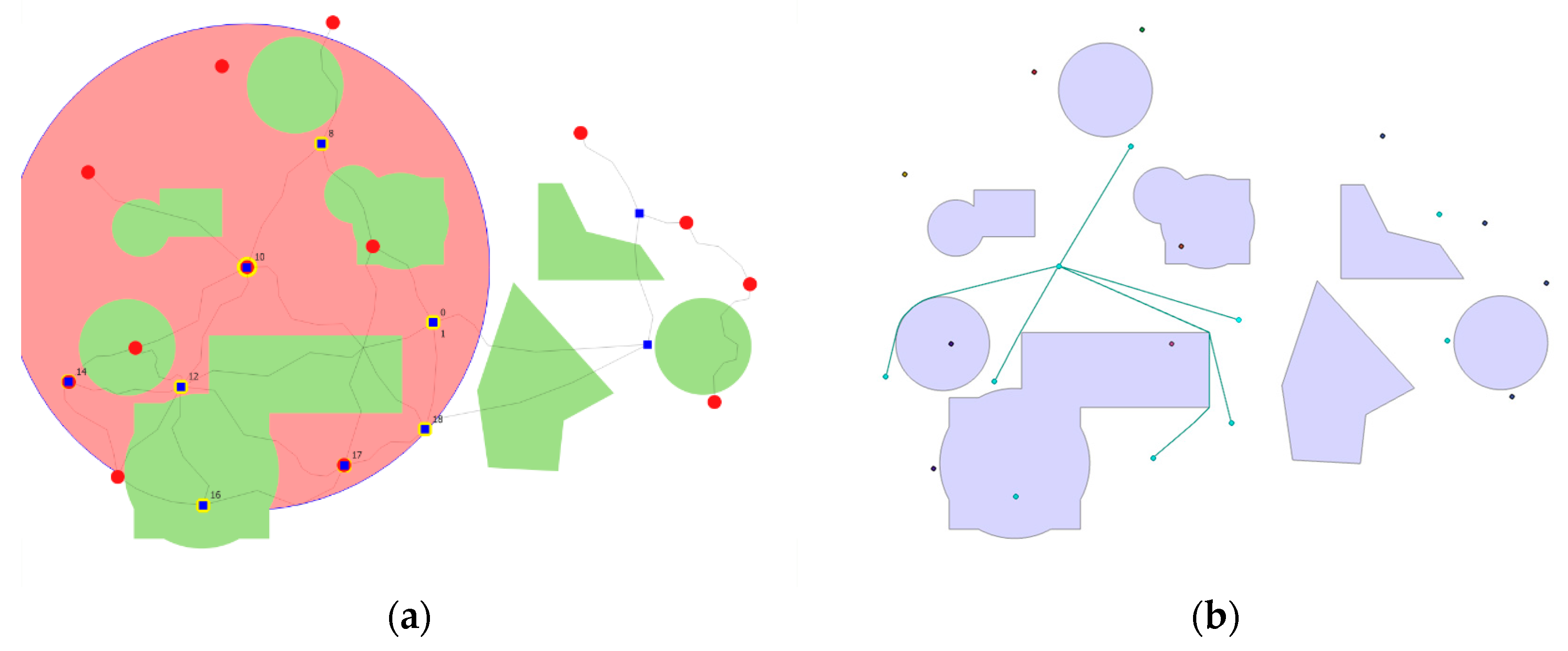
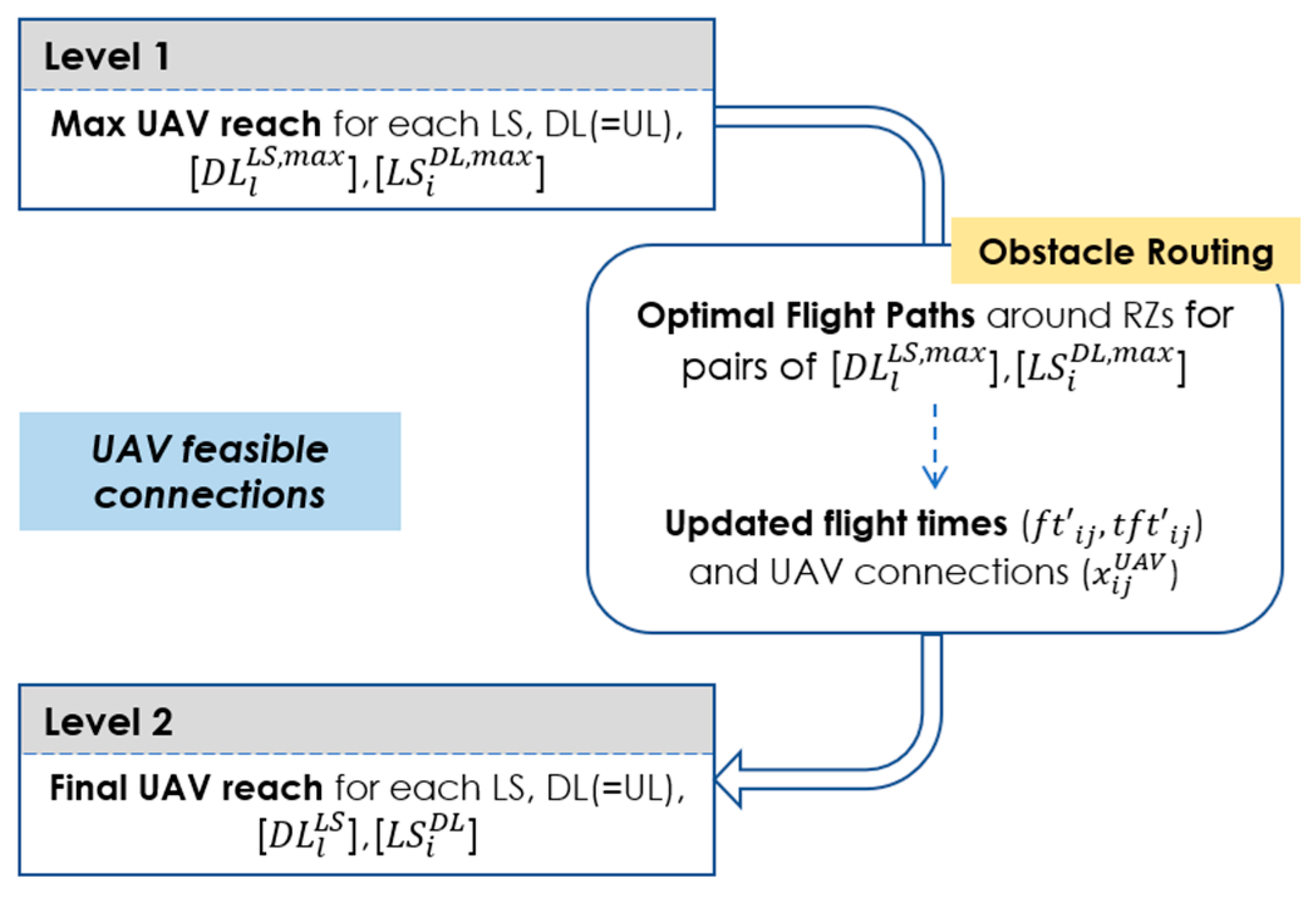
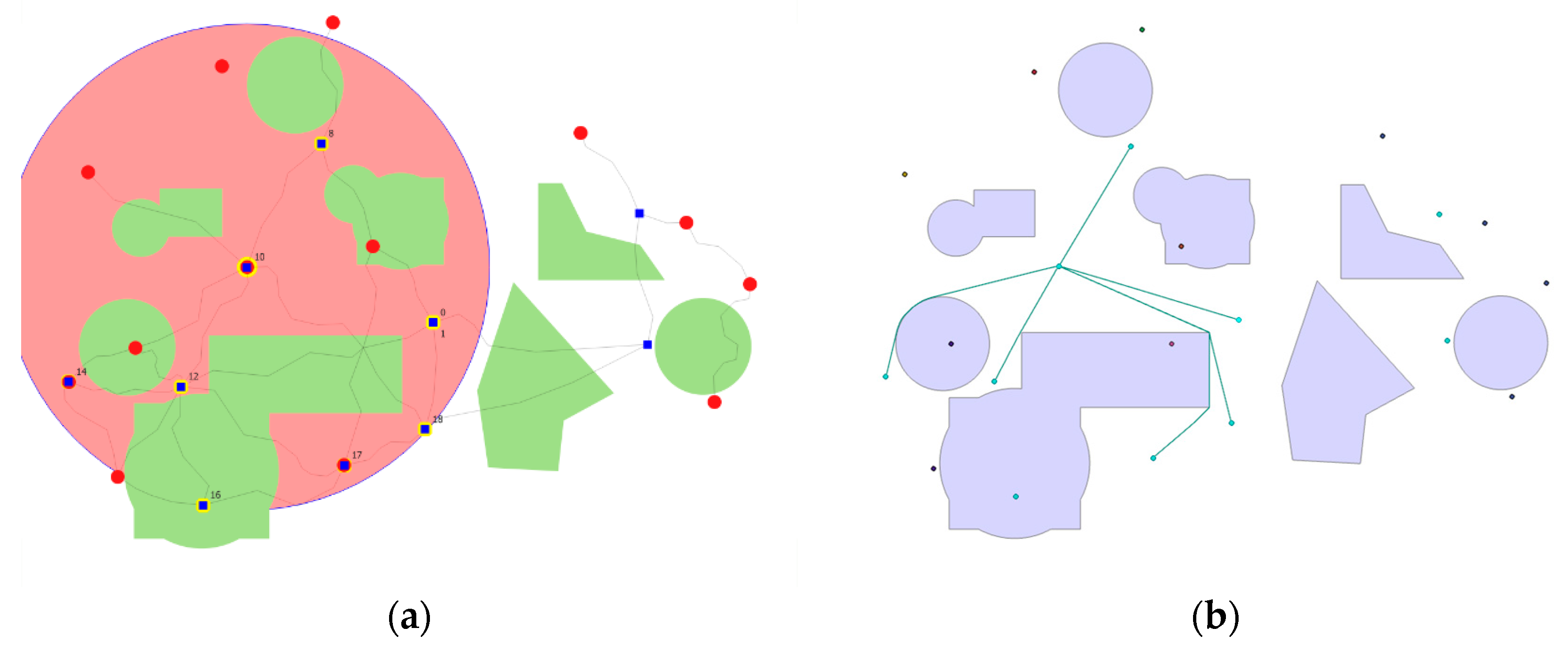
2.4.1. UAV Range and Connections
- Stage 0: Initial Infrastructure (CD, RDs, VHs);
- Stage 1: Physical constraints on emerging DLs (e.g., area characteristics, obstacles, safe room for take-off and landing);
- Stage 2: Operational constraints (e.g., maintenance, time of day, customer choices)
- Stage 3: RZ constraints (an LS or DL falls within an RZ).
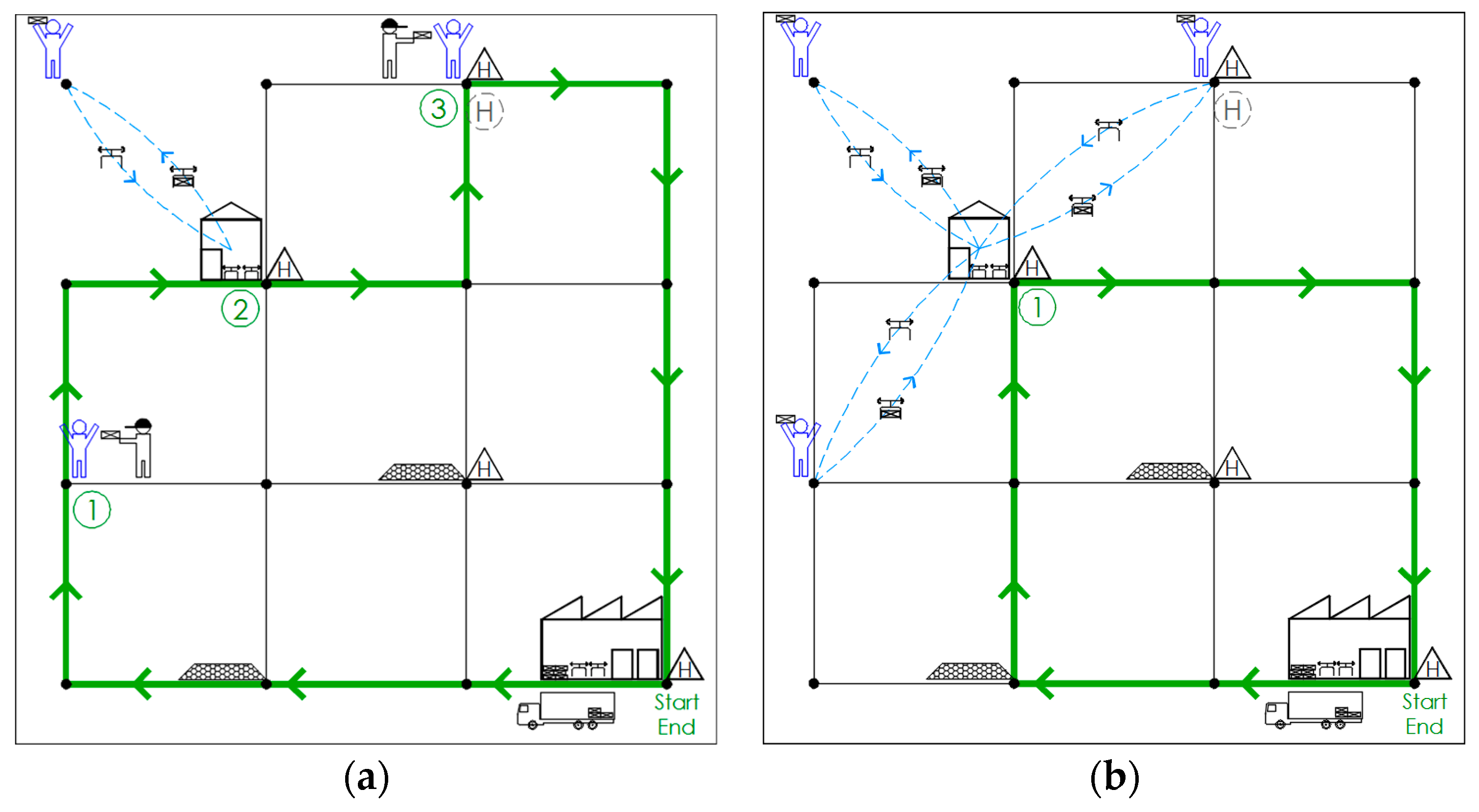
2.4.2. Obstacle Routing and Flight Time Updates
2.4.3. Mode Assignment and Vehicle Routing
Sub-Paths between Mandatory Nodes
2.4.4. Objective Function and Solution Performance Calculations
- The assignment of items to their respective service node ( for each k);
- The order of visit of mandatory nodes (ordered set of ).
2.5. Proposed Solution Optimization Methodology
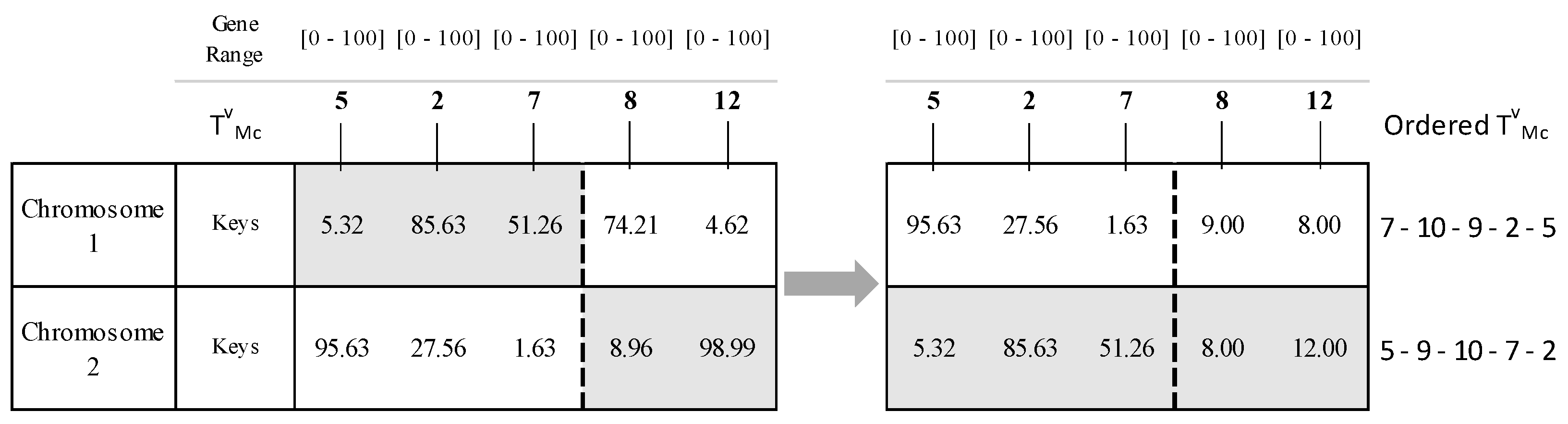
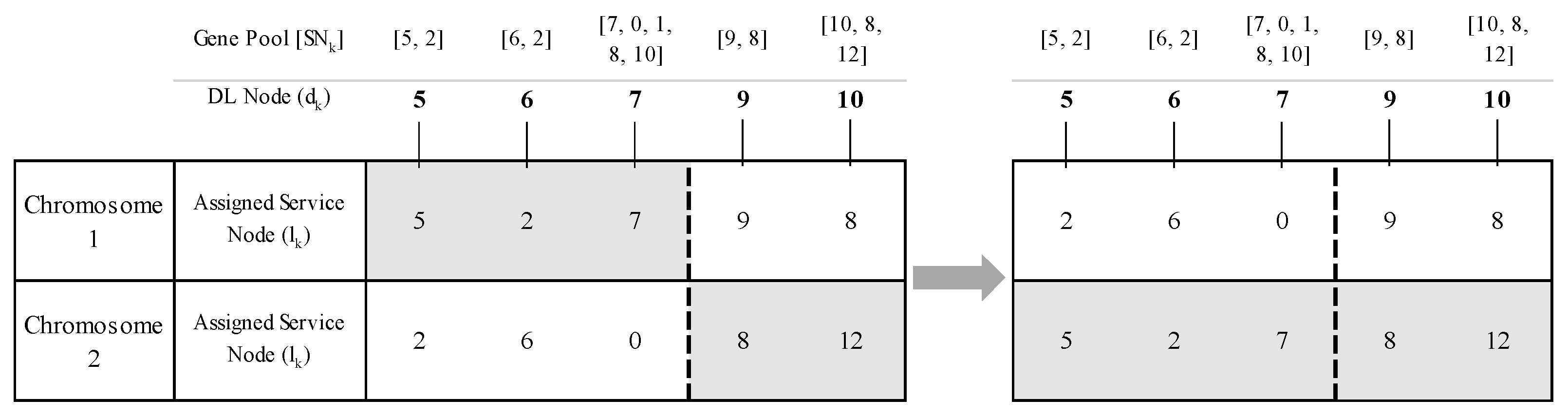
2.5.1. Assignment and Routing Optimization Nested Genetic Algorithm
Outer GA (Mode and Service Node Assignment of Items)
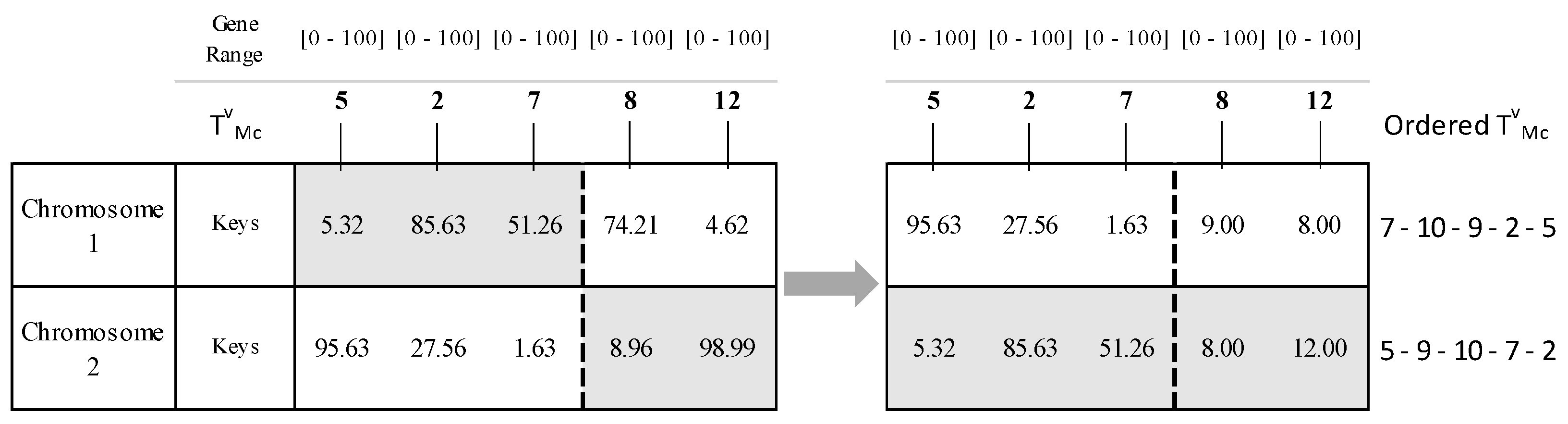
Inner GA (Conventional Vehicle Routing)
3. Application and Results
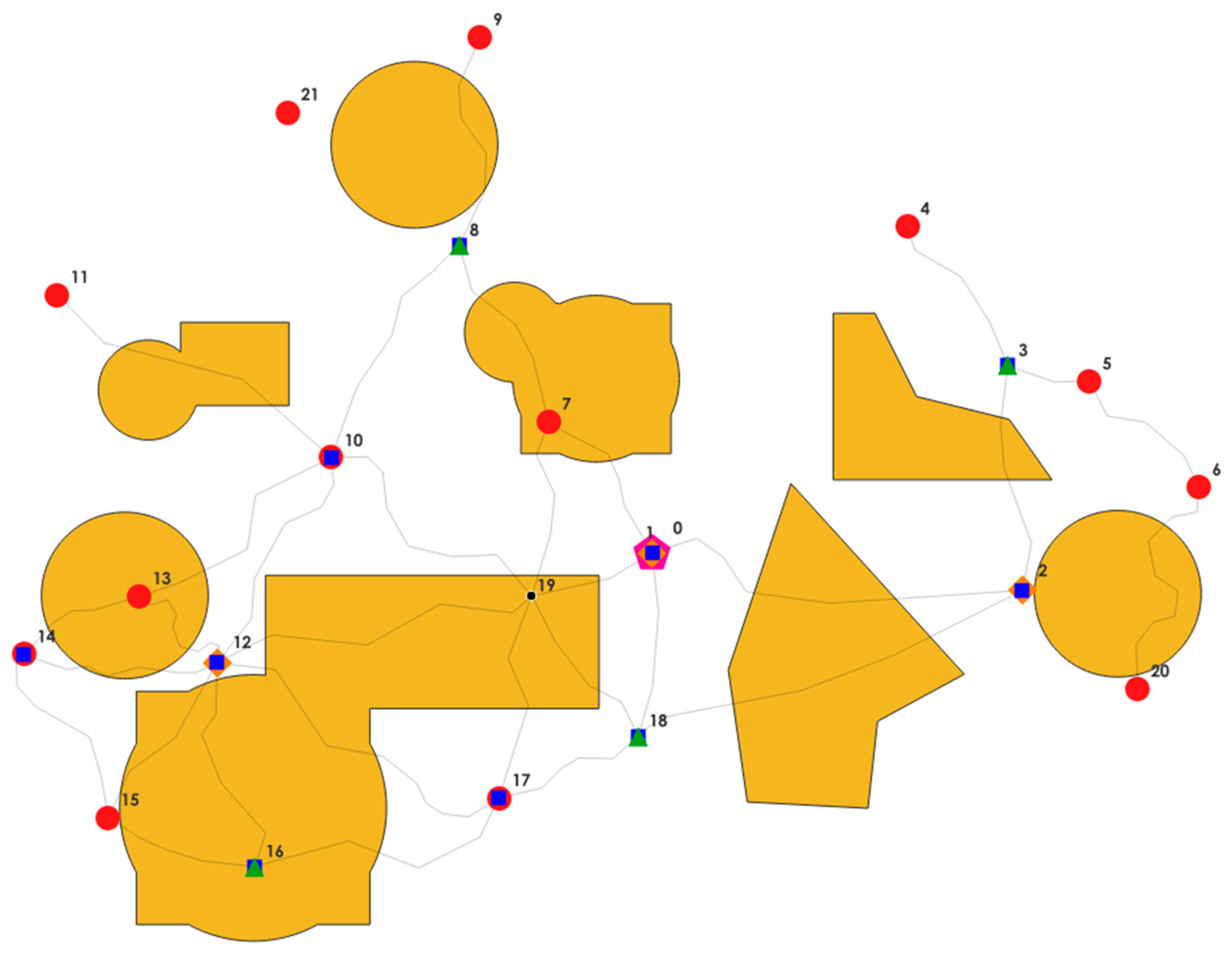
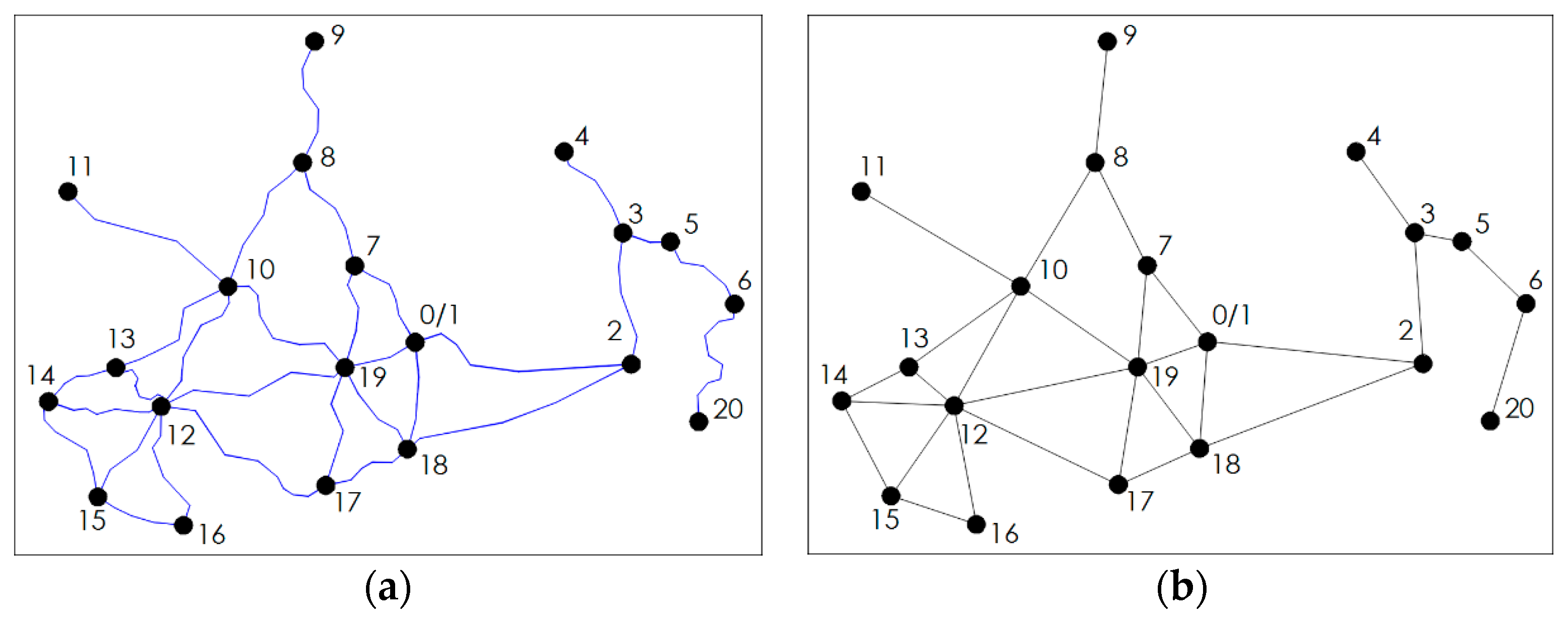
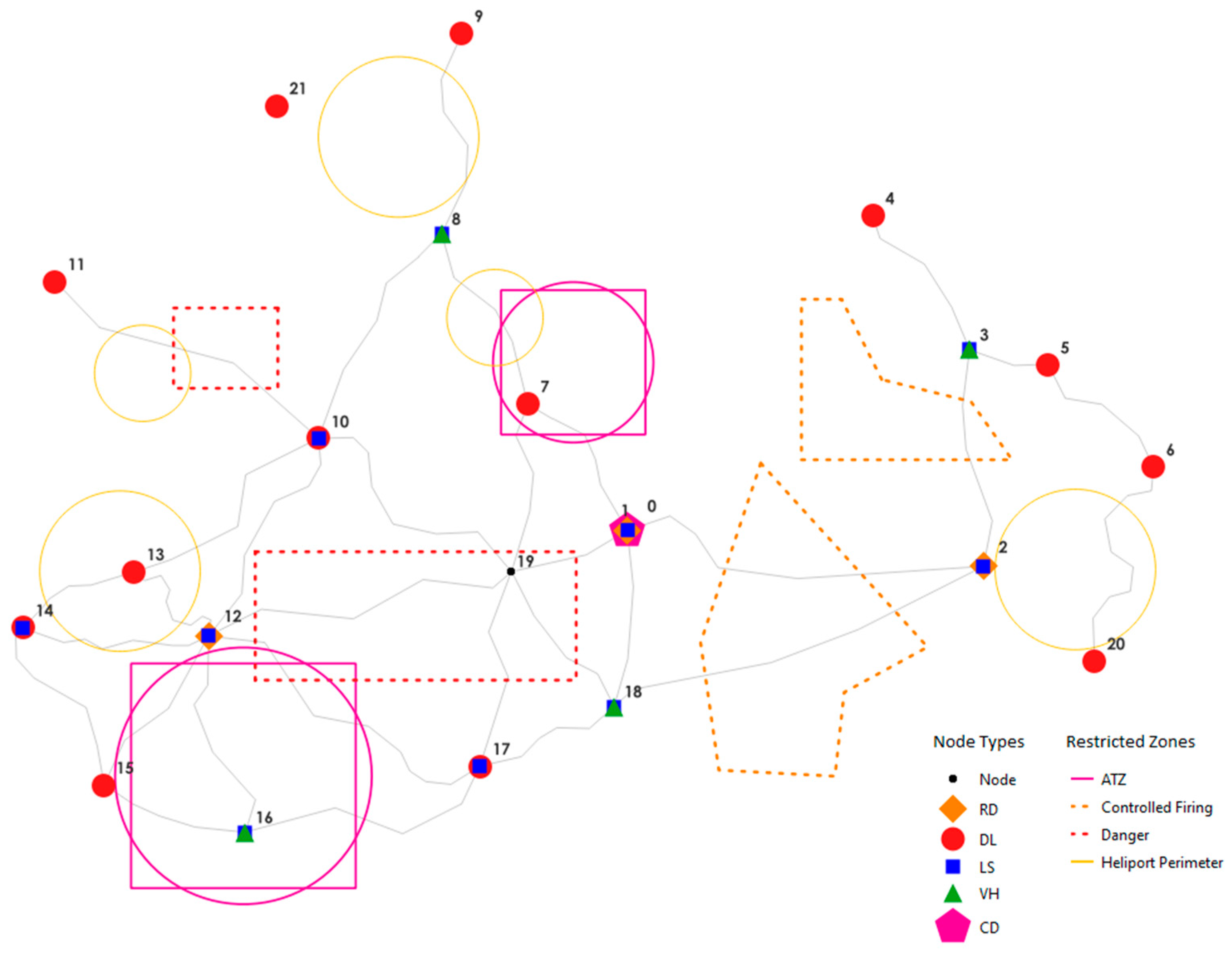
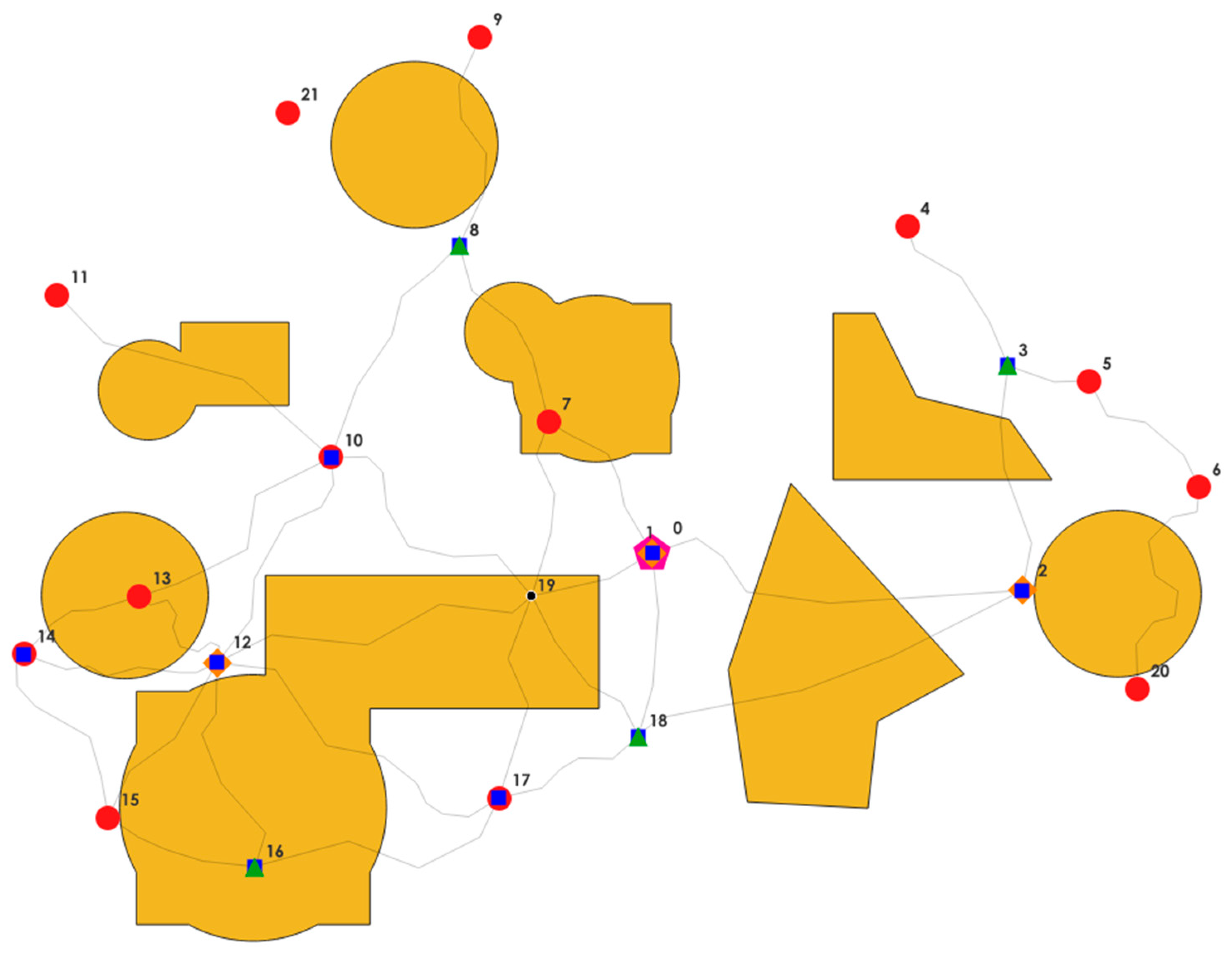
3.1. Base Network
3.1.1. Input Data
- The geographical size of the network should resemble that of a large city or the distances between neighboring cities.
- There must be dead-end edges, i.e., edges that are connected to a single node at one end (to resemble last-mile cases with limited connections).
- A node is not necessarily connected to all its closest ones (to emulate missing links).
- At some point, there must be a series of consecutive edges with a single node connection in between (to resemble possible stops along a single corridor).
- There must be a CD and at least one RD (apart from the CD duplicate) away from it.
- There must be a few Virtual Hubs, distributed evenly throughout the network (not all Virtual Hubs will necessarily serve as allowed Launch Sites).
- There must be at least one Delivery Location outside the given CV network where only a UAV can be of service.
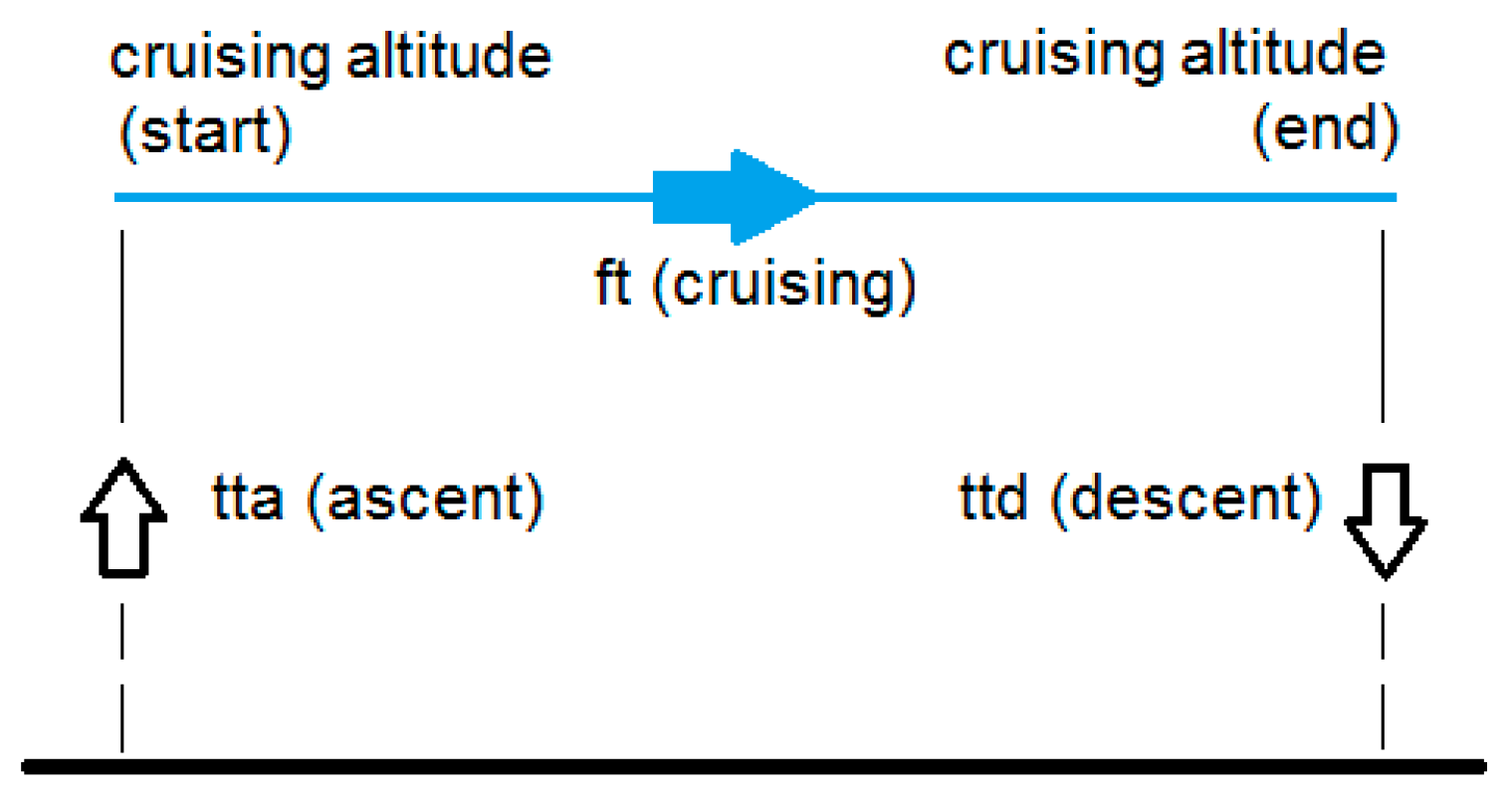
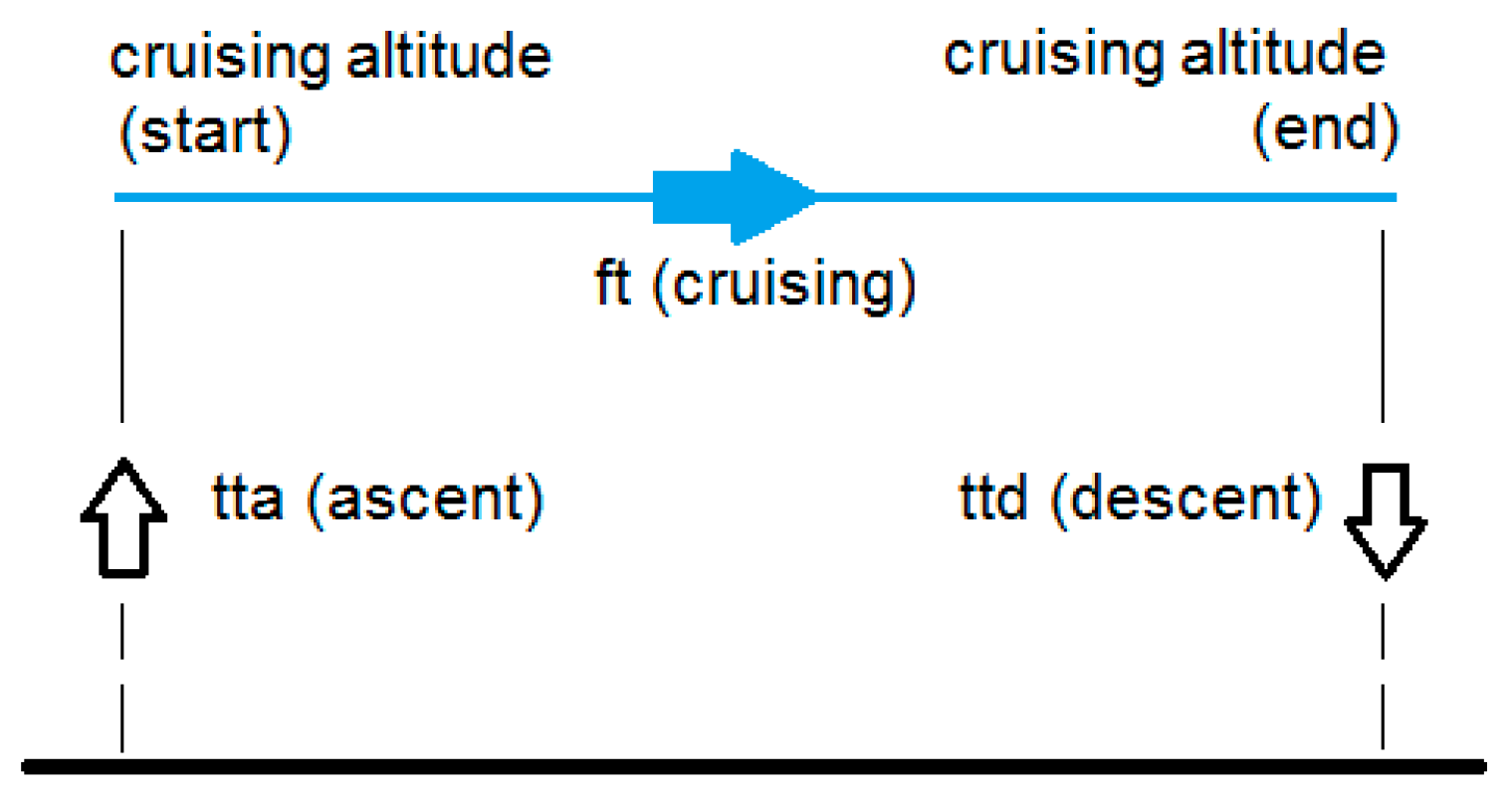
- SCV = 40 km/h, HUAV = 120 m, SUAV = 14.45 m/s
- SUAVasc = 4.25 m/s (tta = 28.2 s, for HUAV = 120 m)
- SUAVdes = 3.4 m/s (ttd = 35.3 s, for HUAV = 120 m)
- RUAV = 60 min (2400 s)
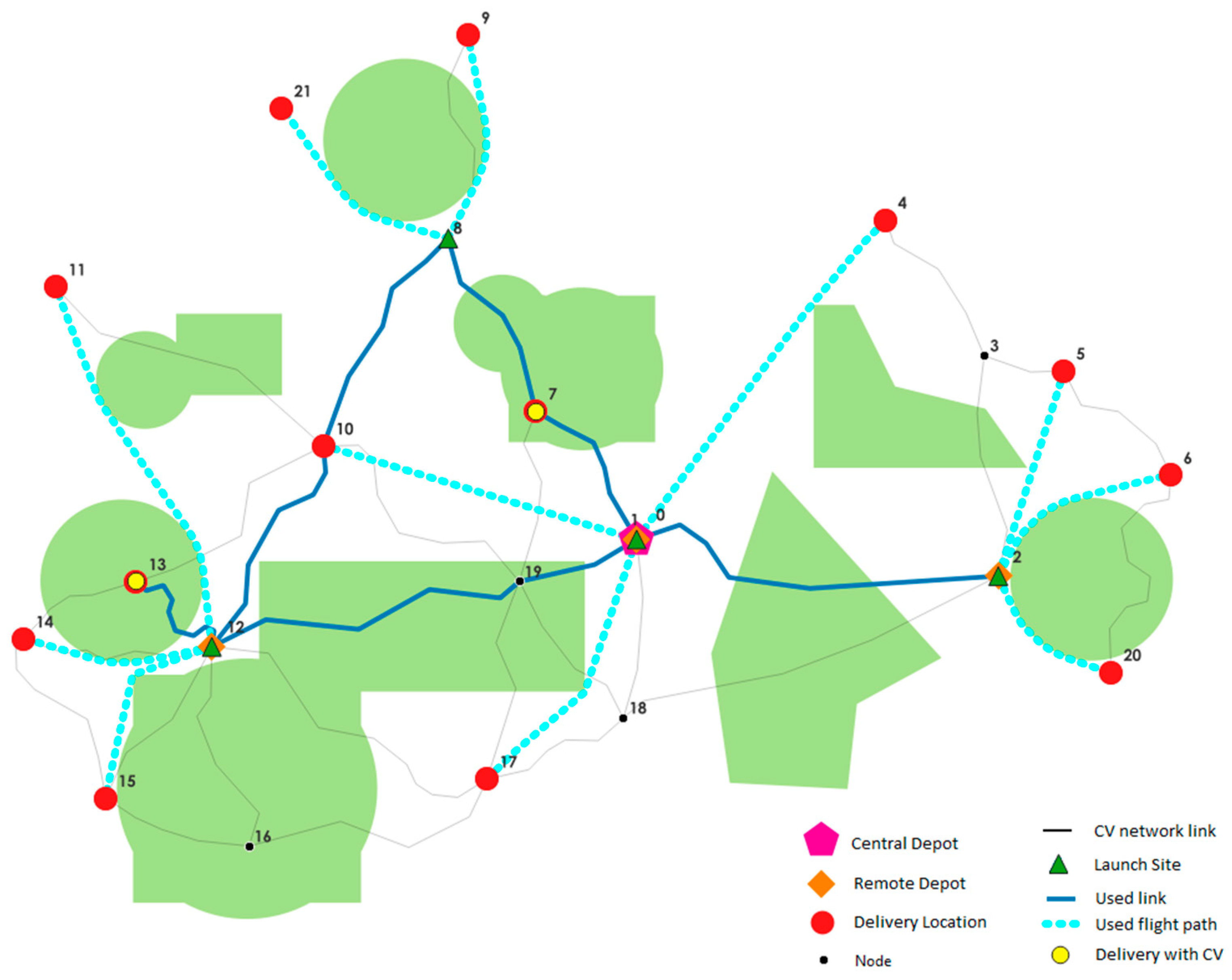
3.1.2. Application and Solution
4. Conclusions
Author Contributions
Funding

Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| vi | x | y | vi | x | y |
|---|---|---|---|---|---|
| 0 | 0.000 | 0.000 | 11 | −35,652.764 | 15,493.993 |
| 1 | 0.000 | 0.000 | 12 | −26,081.454 | −6588.331 |
| 2 | 22,200.500 | −2246.434 | 13 | −30,736.252 | −2595.080 |
| 3 | 21,339.640 | 11,254.890 | 14 | −37,656.441 | −6082.275 |
| 4 | 15,305.796 | 19,590.346 | 15 | −32,594.951 | −15,883.915 |
| 5 | 26,209.829 | 10,341.626 | 16 | −23,794.972 | −18,816.222 |
| 6 | 32,795.242 | 3940.702 | 17 | −9184.639 | −14,708.946 |
| 7 | −6200.316 | 7871.878 | 18 | −814.285 | −10,979.538 |
| 8 | −11,565.366 | 18,473.235 | 19 | −7208.515 | −2587.391 |
| 9 | −10,318.214 | 30,943.160 | 20 | 29,121.346 | −8156.159 |
| 10 | −19,235.476 | 5729.837 |
| Lij | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 0 | 0 | 0 | 23,899 | inf | inf | inf | inf | 10,611 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 11,133 | 7752 | inf |
| 1 | 0 | 0 | 23,899 | inf | inf | inf | inf | 10,611 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 11,133 | 7752 | inf |
| 2 | 23,899 | 23,899 | 0 | 13,880 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 24,885 | inf | inf |
| 3 | inf | inf | 13,880 | 0 | 10,717 | 5038 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 4 | inf | inf | inf | 10,717 | 0 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 5 | inf | inf | inf | 5038 | inf | 0 | 9870 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 6 | inf | inf | inf | inf | inf | 9870 | 0 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 16,017 |
| 7 | 10,611 | 10,611 | inf | inf | inf | inf | inf | 0 | 12,358 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 11,020 | inf |
| 8 | inf | inf | inf | inf | inf | inf | inf | 12,358 | 0 | 13,583 | 15,285 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 9 | inf | inf | inf | inf | inf | inf | inf | inf | 13,583 | 0 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 10 | inf | inf | inf | inf | inf | inf | inf | inf | 15,285 | inf | 0 | 19,703 | 15,115 | 15,413 | inf | inf | inf | inf | inf | 16,914 | inf |
| 11 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 19,703 | 0 | inf | inf | inf | inf | inf | inf | inf | inf | inf |
| 12 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 15,115 | inf | 0 | 8641 | 12,129 | 11,621 | 13,828 | 21,266 | inf | 20,338 | inf |
| 13 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 15,413 | inf | 8641 | 0 | 8088 | inf | inf | inf | inf | inf | inf |
| 14 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 12,129 | 8088 | 0 | 12,523 | inf | inf | inf | inf | inf |
| 15 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 11,621 | inf | 12,523 | 0 | 9433 | inf | inf | inf | inf |
| 16 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 13,828 | inf | inf | 9433 | 0 | inf | inf | inf | inf |
| 17 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 21,266 | inf | inf | inf | inf | 0 | 9629 | 12,908 | inf |
| 18 | 11,133 | 11,133 | 24,885 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 9629 | 0 | 10,852 | inf |
| 19 | 7752 | 7752 | inf | inf | inf | inf | inf | 11,020 | inf | inf | 16,914 | inf | 20,338 | inf | inf | inf | inf | 12,908 | 10,852 | 0 | inf |
| 20 | inf | inf | inf | inf | inf | inf | 16,017 | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | inf | 0 |
References
- European Commission. Emission Performance Standards for New Passenger Cars and for New Light Commercial Vehicles; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- Witkamp, B.; van Gijlswijk, R.; Bolech, M.; Coosemans, T.; Hooftman, N.S. The Transition to a Zero Emission Vehicles Fleet for Cars in the EU by 2050: Pathways and Impacts: An Evaluation of Forecasts and Backcasting the COP21 Commitments; European Alternative Fuels Observatory: Brussels, Belgium, 2017. [Google Scholar]
- Davies, C. The Carbon Cost of Home Delivery and How to Avoid It. Horizon: The EU Research & Innovation Magazine. 17 February 2020. Available online: https://ec.europa.eu/research-and-innovation/en/horizon-magazine/carbon-cost-home-delivery-and-how-avoid-it (accessed on 14 March 2023).
- ITF. Ready for Take Off? Integrating Drones into the Transport System; OECD Publishing: Paris, France, 2021. [Google Scholar]
- Roland Berger Gmbh. Cargo Drones: The Future of Parcel Delivery (USD 5.5 Billion Market). Roland Berger Gmbh, 19 February 2020. Available online: https://www.rolandberger.com/en/Point-of-View/Cargo-drones-The-future-of-parcel-delivery.html (accessed on 10 September 2022).
- McKinsey & Company. Up in the Air: How Do Consumers View Advanced Air Mobility? McKinsey Global Publishing, May 2021. Available online: https://www.mckinsey.com/industries/aerospace-and-defense/our-insights/up-in-the-air-how-do-consumers-view-advanced-air-mobility (accessed on 1 June 2021).
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Ferrandez, S.M.; Harbison, T.; Weber, T.; Sturges, R.; Rich, R. Optimization of a Truck-drone in Tandem Delivery Network Using K-means and Genetic Algorithm Sergio. J. Ind. Eng. Manag. 2016, 9, 374–388. [Google Scholar]
- MacQueen, J.B. Some Methods for Classification and Analysis of Multivariate Observations. Berkeley Symp. Math. Stat. Probab. 1967, 5, 281–297. [Google Scholar]
- Moshref-Javadi, M.; Lee, S.; Winkenbach, M. Design and evaluation of a multi-trip delivery model with truck and drones. Transp. Res. E Logist. Transp. Rev. 2020, 136, 101887. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transp. Res. E Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]
- Marinelli, M.; Caggiani, L.; Ottomanelli, M.; Dell, M. En route truck–drone parcel delivery for optimal vehicle routing strategies. IET Intell. Transp. Syst. 2017, 12, 253–261. [Google Scholar] [CrossRef]
- Chang, Y.S.; Lee, H.J. Optimal delivery routing with wider drone-delivery areas along a shorter truck-route. Expert Syst. Appl. 2018, 104, 307–317. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization Approaches for the Traveling Salesman Problem with Drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Gonzalez-R, P.L.; Canca, D.; Andrade-Pineda, J.L.; Calle, M.; Leon-Blanco, J.M. Truck-drone team logistics: A heuristic approach to multi-drop route planning. Transp. Res. C Emerg. Technol. 2020, 114, 657–680. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Song, B.D.; Lee, S. Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. Int. J. Prod. Econ. 2019, 214, 220–233. [Google Scholar] [CrossRef]
- Zhou, H.; Qin, H.; Cheng, C.; Rousseau, L.-M. An exact algorithm for the two-echelon vehicle routing problem with drones. Transp. Res. B Methodol. 2023, 168, 124–150. [Google Scholar] [CrossRef]
- Momeni, M.; Al-E-Hashem, S.M.J.M.; Heidari, A. A new truck-drone routing problem for parcel delivery by considering energy consumption and altitude. Ann. Oper. Res. 2023, 1–47. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Chen, J.; Wang, F.; Zhao, Y. Truck and drone routing problem with synchronization on arcs. Nav. Res. Logist. 2022, 69, 884–901. [Google Scholar] [CrossRef]
- Leon-Blanco, J.M.; Gonzalez-R, P.; Andrade-Pineda, J.L.; Canca, D.; Calle, M. A multi-agent approach to the truck multi-drone routing problem. Expert Syst. Appl. 2022, 195, 116604. [Google Scholar] [CrossRef]
- Li, H.; Wang, F. Branch-price-and-cut for the truck–drone routing problem with time windows. Nav. Res. Logist. 2022, 70, 184–204. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Rardin, R.L. Optimization in Operations Research, 2nd ed.; Pearson Higher Education, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]
- Dantzig, G.; Fulkerson, R.; Johnson, S. Solution of a large-scale Traveling Salesman Problem. Oper. Res. 1954, 2, 393–410. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming Treatment of the Travelling Salesman Problem. J. ACM 1962, 9, 61–63. [Google Scholar] [CrossRef]
- Little, J.D.; Murty, K.G.; Sweeney, D.W.; Karel, C. An algorithm for the traveling salesman problem. Oper. Res. 1963, 11, 972–989. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to NP-Completeness; WH Freeman: New York, NY, USA, 1979. [Google Scholar]
- Applegate, D.; Bixby, R.; Chvátal, V.; Cook, W. Finding Cuts in the TSP (A Preliminary Report); Center for Discrete Mathematics & Theoretical Computer Science: Piscataway, NJ, USA, 1995. [Google Scholar]
- Applegate, D.; Bixby, R.; Chvátal, V.; Cook, W. The Traveling Salesman Problem. In Combinatorial Optimization: Theory and Algorithms, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 21, pp. 527–562. [Google Scholar]
- Held, M.; Karp, R.M. A dynamic programming approach to sequencing problems. J. Soc. Ind. Appl. Math. 1962, 10, 196–210. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Holland, J.H. Adaptation in Natural and Artificial Systems; Arbor, A., Ed.; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Glover, F. Tabu Search—Part I. ORSA J. Comput. 1989, 1, 190–206. [Google Scholar] [CrossRef]
- Glover, F. Search—Part II. ORSA J. Comput. 1990, 2, 4–32. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Korf, R.E. Depth-first iterative-deepening: An optimal admissible tree search. Artif. Intell. 1985, 27, 97–109. [Google Scholar] [CrossRef]
- Koenig, S.; Likhachev, M.; Furcy, D. Lifelong Planning A∗. Artif. Intell. 2004, 155, 93–136. [Google Scholar] [CrossRef]
- ICAO. Annex 11 to the Convention on International Civil Aviation—Air Traffic Services; International Civil Aviation Organization: Montreal, QC, Canada, 2018. [Google Scholar]
- EASA. Easy Access Rules for Unmanned Aircraft Systems; European Union: Brussels, Belgium, 2022. [Google Scholar]
- ICAO. Annex 2 to the Convention on Civil Aviation—Rules of the Air, 10th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- FAA. Chapter 15—Airspace. In Pilots Handbook of Aeronautical Knowledge; Federal Aviation Administration: Washington, DC, USA, 2016. [Google Scholar]
- FAA. Aeronautical Information Publication (AIP); Federal Aviation Administration: Washington, DC, USA, 2022. [Google Scholar]
- HCAA. Drone Aware—GR (DAGR). Hellenic CAA. 2023. Available online: https://dagr.hasp.gov.gr/ (accessed on 1 June 2023).
- Lumelsky, V.; Stepanov, A.A. Path-planning strategies for a point mobile automaton moving amidst unknown obstacles of arbitrary shape. Algorithmica 1987, 2, 403–430. [Google Scholar] [CrossRef]
- Kamon, I.; Rimon, E.; Rivlin, E. TangentBug: A Range-Sensor-Based Navigation Algorithm. Int. J. Robot. Res. 1998, 17, 934–953. [Google Scholar] [CrossRef]
- Kamon, I.; Rivlin, E.; Rimon, E. A New Range-Sensor Based Globally Convergent Navigation Algorithm for Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996. [Google Scholar]
- Rashid, A.T.; Ali, A.A.; Frasca, M.; Fortuna, L. Path Planning and Obstacle Avoidance Based on Shortest Distance Algorithm. In Proceedings of the Second Al-Sadiq International Conference on Multidisciplinary in IT and Communication Science and Applications, Baghdad, Iraq, 22–23 November 2017. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Iliopoulou, C.; Kepaptsoglou, K.; Karlaftis, M.G. Route Planning for a Sea Plane Service: The Case of the Greek Islands. Comput. Oper. 2015, 59, 66–77. [Google Scholar] [CrossRef]
- Lenstra, J.K.; Kan, A.H.G.R. Complexity of vehicle routing and scheduling problems. Networks 1981, 11, 221–227. [Google Scholar] [CrossRef]
- DJI. DJI Matrice 300 RTK Specs. 2023. Available online: https://enterprise.dji.com/matrice-300/specs (accessed on 15 August 2023).
- Flying Basket. FB3—The Most Compact Drone in the World Able to Carry 100 kg. 2023. Available online: https://flyingbasket.com/fb3 (accessed on 15 August 2023).
- Matternet. Matternet—M2. 2023. Available online: https://www.engineeringforchange.org/solutions/product/matternet-m2/ (accessed on 15 August 2023).
- ESRI. “Flow Direction”. 2023. Available online: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-analyst-toolbox/flow-direction.htm (accessed on 1 August 2023).
- Jenson, S.K.; Domingue, J.O. Extracting Topographic Structure from Digital Elevation Data for Geographic Information System Analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Qin, C.; Zhu, A.X.; Pei, T.; Li, B.; Zhou, C.; Yang, L. N adaptive approach to selecting a flow partition exponent for a multiple flow direction algorithm. Int. J. Geogr. Inf. Sci. 2007, 21, 443–458. [Google Scholar] [CrossRef]
- Tarboton, D.G. A new method for the determination of flow directions and upslope areas in grid digital elevation models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef]
- Douglas, D.H. Least-cost Path in GIS Using an Accumulated Cost Surface and Slopelines. Cartogr. Int. J. Geogr. Inf. Geovisualization 1994, 31, 37–51. [Google Scholar] [CrossRef]



| Abbreviations | |
| CV: Conventional Vehicle (truck, train, vessel, here: truck) UAV: Unmanned Aerial Vehicle (aka drone) VTOL: Vertical Take-Off and Landing (UAV type) CVN: Physical (fixed) network of CV operation RZ: Restricted Zone (no-fly) CD: Central Depot, forming subset CD′: Central Depot Duplicate, forming subset RD: Remote Depots, forming subset | VH: Virtual Hubs, forming subset DL: Delivery Locations, forming subset UL: UAV visitable DLs, forming subset LS: Launch Sites, forming subset SN: Service Nodes for item : Total time of travel for the CV (since start) : Global Operations Time, when all vehicles have completed their tasks and have returned to their intended base (since start) |
| Parameters | |
| SCV′: CV mean speed SUAV: mean UAV speed at cruising altitude SUAVasc: mean UAV speed of ascend SUAVdes: mean UAV speed of descend | RUAV: UAV range of operation (time) HUAV: UAV cruising altitude : transshipment cost (time to deploy UAV) : service time |
| Variables | |
| : Binary variable (0,1) indicating node type “Central Depot” : Binary variable (0,1) indicating node type “Remote Depot” : Binary variable (0,1) indicating node type “Virtual Hub” : Binary variable (0,1) indicating node type “Delivery Location” : Binary variable (0,1) indicating node type “Launch Site” : Length of CVN edge : UAV flight time at cruising altitude : Length of UAV edge, at cruising altitude : Time to ascend (take-off to cruising altitude) : Time to descend (cruising altitude to landing) : Total UAV airtime from take-off to landing : binary variable (0,1) for the existence of direct UAV connection (in range), : binary variable (0,1) indicating final delivery with CV | : number of items assigned to launch site : time for UAV deployment-to-home : waiting time of CV on node : binary variable (0,1) indicating whether a node is either type of depots : cost (time) for shortest path between two mandatory nodes : binary variable for access of node by CV : binary variable for edge traveled by UAV : binary variable for edge traveled by CV : cumulative passes over edge by CV : time of CV approach to node : time of CV departure from node : time of return of last UAV, when the launch site is a depot (since start) : time of delivery of item (since start) |
| Item (k) | Node (dk) | Service Nodes Pool (SNk) | Assigned Service Node (lk) | Mode | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 4 | 4 | 0 | 2 | 3 | 0 | UAV | |
| 2 | 5 | 5 | 2 | 3 | 2 | UAV | ||
| 3 | 6 | 6 | 2 | 3 | 2 | UAV | ||
| 4 | 7 | 7 | 7 | CV | ||||
| 5 | 9 | 9 | 8 | 8 | UAV | |||
| 6 | 10 | 10 | 0 | 8 | 12 | 14 | 0 | UAV |
| 7 | 11 | 11 | 8 | 10 | 12 | 14 | 12 | UAV |
| 8 | 13 | 13 | 13 | CV | ||||
| 9 | 14 | 14 | 10 | 12 | 12 | UAV | ||
| 10 | 15 | 15 | 12 | 14 | 12 | UAV | ||
| 11 | 17 | 17 | 0 | 18 | 0 | UAV | ||
| 12 | 20 | 20 | 2 | 3 | 2 | UAV | ||
| 13 | 21 | 8 | 10 | 8 | UAV | |||
| [‘0’, ‘2’, ‘7’, ‘8’, ‘12’, ‘13’] | Mandatory nodes with action | |
| [‘0’, ‘1’, ‘2’, ‘7’, ‘8’, ‘12’, ‘13’] | Mandatory nodes | |
| [‘0’, ‘2’, ‘13’, ‘12’, ‘8’, ‘7’, ‘1’] | Path of mandatory nodes | |
| [(‘0’, ‘2’), (‘2’, ‘13’), (‘13’, ‘12’), (‘12’, ‘8’), (‘8’, ‘7’), (‘7’, ‘1’)] | Sequence of shell edges, through mandatory nodes | |
| [[‘0’, ‘2’], [‘2’, ‘0’, ‘19’, ‘12’, ‘13’], [‘13’, ‘12’], [‘12’, ‘10’, ‘8’], [‘8’, ‘7’], [‘7’, ‘1’]] | Full path of nodes | |
| [(‘0’, ‘2’), (‘2’, ‘0’), (‘0’, ‘19’), (‘19’, ‘12’), (‘12’, ‘13’), (‘13’, ‘12’), (‘12’, ‘10’), (‘10’, ‘8’), (‘8’, ‘7’), (‘7’, ‘1’)] | Full sequence of edges |
| ORDER | 1 (CD) | 2 | 3 | 4 | 5 | 6 | 7 (CD/RD) |
|---|---|---|---|---|---|---|---|
| MANDATORY NODE | 0 | 2 | 13 | 12 | 8 | 7 | 1 |
| PASS THROUGH | 0, 9, 12 | 10 | |||||
| ACTION | Delivery | Delivery | |||||
| Launch | Launch | Launch | Launch | (end) | |||
| TAPP | 0.0 | 2150.9 | 7787.7 | 8625.5 | 2736.0 | 15,325.8 | 16,340.8 |
| 0.0 | 2150.9 | 5456.8 | 777.7 | 2736.0 | 1112.3 | 955.0 | |
| WI | 0.0 | 180.0 | 60.0 | 180.0 | 2672.1 | 60.0 | 0.0 |
| TDEP | 0.0 | 2330.9 | 7847.7 | 8805.5 | 14,213.6 | 15,385.8 | 16,340.8 |
| TRET | 4530.3 | 5248.7 | 0.0 | 13,281.0 | 0.0 | 0.0 | 0.0 |
| GOT (S) | 16,340.8 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouretas, K.; Kepaptsoglou, K. Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach. Vehicles 2023, 5, 1060-1086. https://doi.org/10.3390/vehicles5030058
Kouretas K, Kepaptsoglou K. Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach. Vehicles. 2023; 5(3):1060-1086. https://doi.org/10.3390/vehicles5030058
Chicago/Turabian StyleKouretas, Konstantinos, and Konstantinos Kepaptsoglou. 2023. "Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach" Vehicles 5, no. 3: 1060-1086. https://doi.org/10.3390/vehicles5030058
APA StyleKouretas, K., & Kepaptsoglou, K. (2023). Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach. Vehicles, 5(3), 1060-1086. https://doi.org/10.3390/vehicles5030058