
Strategic Approach for Electric Vehicle Charging Infrastructure for Efficient Mobility along Highways: A Real Case Study in Spain




Abstract
:1. Introduction
2. Related Work
- Through a series of improvements to the charging infrastructure, an attempt is made to reduce travel time, preferring fast DC recharges to slow AC recharges;
- An innovative charging strategy approach is developed, which tells the EV user how much energy to charge at each CS, thus reducing charging times.
3. Overview of Charging Stations in Europe
4. Methodology
4.1. Input Data
4.2. EV Behavior
- 1 condition: if the compatible variable (EV and CS are compatible) is true, then proceed to the second condition; otherwise, it jumps to the third condition. In particular, the mode and the type of connector of EV are compared with those present in the nearby CS. If there is compatibility, the charging mode and the type of connector with which a possible charge is selected according to a hierarchical process, preferring the fastest charging way.
- 2 condition: if the inequality, i.e., actual range () minus the kilometers to reach the next compatible CS () is greater than the minimum range, which corresponds to 20% of the SoC), is true (1), then the EV proceeds to the third condition; otherwise, to the nearest compatible CS to charge.
- 3 Condition: If the EV reaches the last CS, it proceeds to the destination otherwise to the next checkpoint agent.
- Ways of charging: The primary objective is to outline the conditions under which a vehicle can charge using either alternative current (AC) or direct current (DC). A hierarchical selection process is employed to optimize the charging time, with a preference for the DC mode over the AC mode. This preference stems from the fact that DC charging provides a higher power output compared to AC charging. In the context of “slow charging,” it refers to public AC charging stations with power ratings ranging from 7.4 kW to 11 kW and up to 22 kW. On the other hand, when referring to “high-power” charging, it pertains to direct current charging, where an AC to DC rectifier is positioned upstream at the charging station, bypassing the need for the onboard charger. High-power stations directly supply DC, starting from 50 kW and peaking at 350 kW, enabling rapid charging of electric vehicles. This distinction between slow and high-power charging emphasizes the varying power capabilities and technologies employed to facilitate efficient and expedited charging.
- Charging power: The charging power is determined by two primary factors: the power capacity of the charging point and the maximum power limit accepted by the battery. When selecting the appropriate charging power, if these two values differ, the lower value is always prioritized and considered for charging. This approach ensures that the charging process remains within the constraints of the lower power limit, guaranteeing safe and optimal charging for the battery.
- Charging kilometers: The model also emphasizes determining the required charging distance for electric vehicles at each charging station to minimize the overall travel time and ensure a suitable trip duration per the targeted distance. To achieve this, two distinct methods have been devised and proposed for implementation, as illustrated in Table 1. These methods provide practical approaches to optimize the charging process and enhance the efficiency of EV travel.
4.3. Output Data
5. Case Study
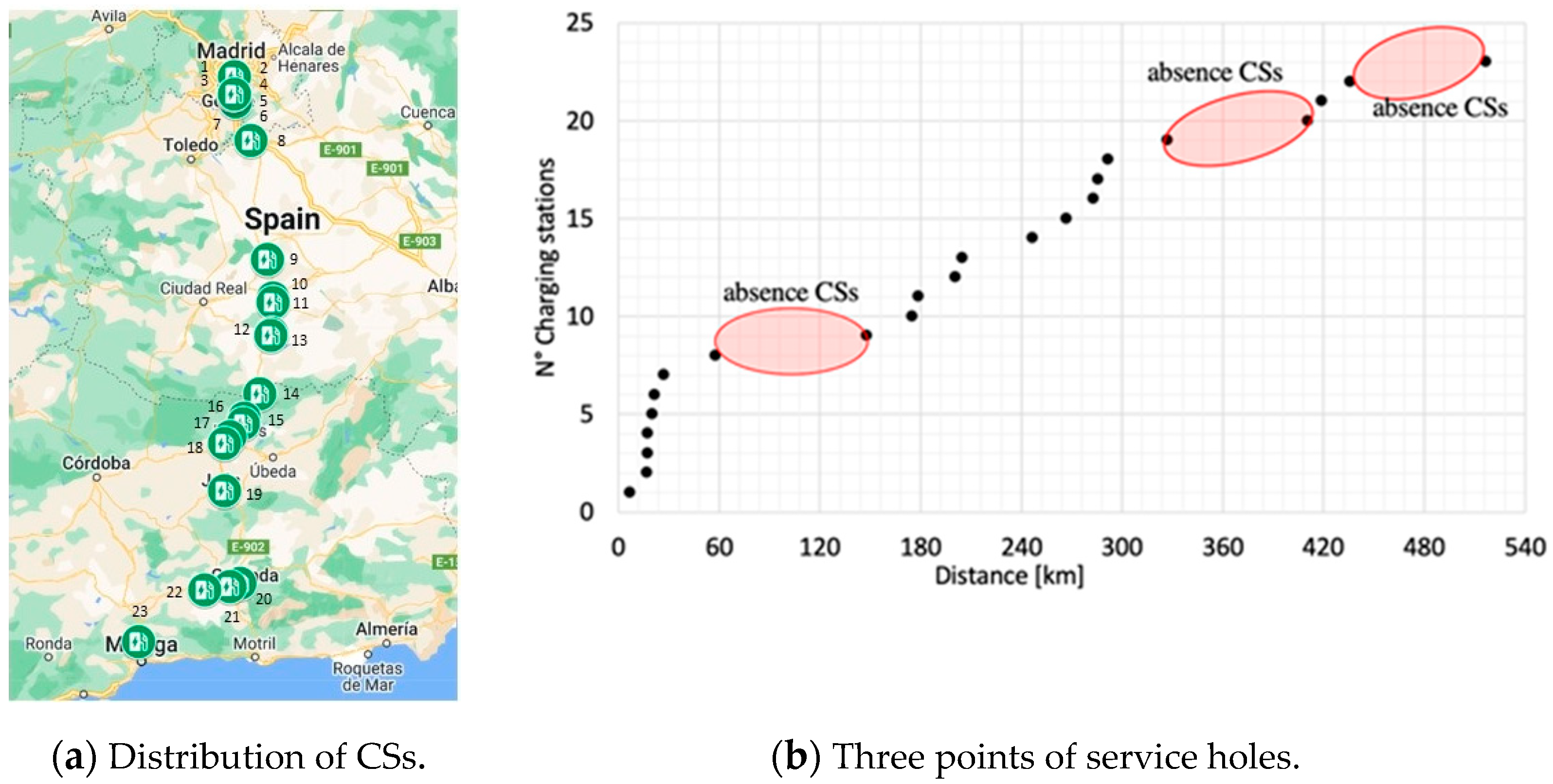
5.1. Charging Infrastructure along the Route
- The CSs located only along the highway are considered, while it is intentionally chosen to ignore those easily accessible off the highway or present in urban areas;
- CSs installed in cities (Madrid and Malaga) are not taken into account;
- The selection of CSs was made considering the type of place: gas stations, public parking lots, hotels, and restaurants. The latter can be defined as public CSs, according to the regulatory framework, in which there is no distinction between private columns open to the public and public charging points;
- The CSs were equipped with slow charging type 2 and fast charging: CCS Combo 2, CHAdeMO, and Supercharge.
5.2. Road Slope
5.3. Traffic Volume
- Regular traffic: is equivalent to 24 EVs per day;
- Intense traffic: an increase of 30% and therefore equal to 31 EVs per day.
5.4. Electric Vehicles
- The battery capacity (kWh);
- Range (km);
- The charging powers AC/DC (kW).
6. Estimation of EV Energy Consumption
6.1. Factor: Weather Conditions
- Cold weather: “worst case” based on a temperature of −10 °C and with the use of heating;
- Mild weather: “best case” based on a temperature of 23 °C and no use of air conditioning.
6.2. Factor: Driving Style
7. Discussion of Results and Optimization
- Regular traffic—Mild/Cold weather;
- Heavy traffic—Mild/Cold weather.
- Total travel time for each EV;
- Time spent in queue versus actual charging time;
- The number of charges for each CS.
7.1. Analysis and Discussion of Results on Worst Case
7.2. Optimization Charging Infrastructure
7.3. Discussion Results after Optimization
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternative Current |
| CS | Charging Station |
| CP | Checkpoint |
| DSM | Demand-Side Management |
| DC | Direct Current |
| EV | Electric Vehicle |
| EVSE | Electric Vehicle Supply Equipment |
| EU | European Union |
| MPDIPA | Modified Primal-Dual Interior Point Algorithm |
| ODBC | Open DataBase Connectivity |
| PV | Photovoltaic |
| RES | Renewable Energy Systems |
| SoC | State of Charge |
| TNDP | Transit Node Design Problem |
| TRDP | The Transit Route Design Problem |
| WHO | World Health Organization |
References
- Emissions of Air Pollutants from Transport—European Environment Agency. Available online: https://www.eea.europa.eu/data-andmaps/indicators/transport-emissions-of-air-pollutants-8/transportemissions-of-air-pollutants-8 (accessed on 16 April 2022).
- CO2 Emissions from Cars: Facts and Figures. 2019. Available online: https://www.europarl.europa.eu/news/en/headlines/society/20190313STO31218/co2-emissions-from-cars-facts-and-figures-infographics (accessed on 16 April 2022).
- Gates, B. How to Avoid a Climate Disaster: The Solutions We Have and the Breakthroughs We Need; Knopf: New York, NY, USA, 2021. [Google Scholar]
- Air Quality Standards. Available online: https://www.who.int/health-topics/air-pollution#tab=tab_1 (accessed on 10 April 2022).
- Foiadelli, F.; Longo, M.; Miraftabzadeh, S. Energy consumption prediction of electric vehicles based on big data approach. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Miraftabzadeh, S.M.; Longo, M.; Foiadelli, F. Estimation Model of Total Energy Consumptions of Electrical Vehicles under Different Driving Conditions. Energies 2021, 14, 854. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Overview of the impacts of plug-in electric vehicles on the power grid. In Proceedings of the 2011 IEEE PES Innovative Smart Grid Technologies, ISGT Asia 2011 Conference: Smarter Grid for Sustainable and Affordable Energy Future, Perth, WA, Australia, 13–16 November 2011. [Google Scholar]
- Fernández, G.; Torres, J.; Cervero, D.; García, E.; Alonso, M.Á.; Almajano, J.; Machín, S.; Bludszuweit, H.; Sanz, J.F. EV charging infrastructure in a petrol station, lessons learned. In Proceedings of the 2018 International Symposium on Industrial Electronics (INDEL), Banja Luka, Bosnia and Herzegovina, 1–3 November 2018. [Google Scholar]
- Sujitha, N.; Krithiga, S. RES based EV battery charging system: A review. Renew. Sustain. Energy Rev. 2017, 75, 978–988. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.-K.; Do, T.D.; Jung, J.-W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Mahmud, K.; Town, G.E.; Morsalin, S.; Hossain, M.J. Integration of electric vehicles and management in the internet of energy. Renew. Sustain. Energy Rev. 2018, 82, 4179–4203. [Google Scholar] [CrossRef]
- Lopez, K.L.; Gagne, C.; Gardner, M.A. Demand-side management using deep learning for smart charging of electric vehicles. IEEE Trans. Smart Grid 2019, 10, 2683–2691. [Google Scholar] [CrossRef]
- Salisbury, M.; Toor, W. How and why leading utilities are embracing electric vehicles. Electr. J. 2016, 29, 22–27. [Google Scholar] [CrossRef]
- Paterakis, N.G.; Erdinc, O.; Bakirtzis, A.G.; Catalão, J.P. Optimal household appliances scheduling under day-ahead pricing and load-shaping demand response strategies. IEEE Trans. Ind. Inform. 2015, 11, 1509–1519. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Gönül, Ö.; Duman, A.C.; Güler, Ö. Electric vehicles and charging infrastructure in Turkey: An overview. Renew. Sustain. Energy Rev. 2021, 143, 110913. [Google Scholar] [CrossRef]
- Luo, L.; Gu, W.; Zhou, S.; Huang, H.; Gao, S.; Han, J.; Wu, Z.; Dou, X. Optimal planning of electric vehicle charging stations comprising multi-types of charging facilities. Appl. Energy 2018, 226, 1087–1099, ISSN 0306-2619. [Google Scholar] [CrossRef]
- Micari, S.; Polimeni, A.; Napoli, G.; Andaloro, L.; Antonucci, V. Electric vehicle charging infrastructure planning in a road network. Renew. Sustain. Energy Rev. 2017, 80, 98–108, ISSN 1364-0321. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, Q. The Overview of Dynamic EV Path Planning. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 5874–5880. [Google Scholar] [CrossRef]
- Qing, G.; Zheng, Z.; Yue, X. Path-planning of automated guided vehicle based on improved Dijkstra algorithm. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 7138–7143. [Google Scholar]
- Cheng, L.; Liu, C.; Yan, B. Improved hierarchical A-star algorithm for optimal parking path planning of the large parking lot. In Proceedings of the IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 695–698. [Google Scholar]
- Zhang, X.; Li, P.; Hu, J.; Liu, M.; Wang, G.; Qiu, J.; Chan, K.W. Yen’s Algorithm-Based Charging Facility Planning Considering Congestion in Coupled Transportation and Power Systems. IEEE Trans. Transp. Electrif. 2019, 5, 1134–1144. [Google Scholar] [CrossRef]
- Muhammad, S.; Zhou, Y. Path planning for EVs based on RA-RRT* model. Front. Energy Res. 2023, 10, 996726. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, F.; Ledwich, G. Optimal Planning of Electric-Vehicle Charging Stations in Distribution Systems. IEEE Trans. Power Deliv. 2013, 28, 102–110. [Google Scholar] [CrossRef]
- Shi, L.; Hao, Y.; Lv, S.; Cipcigan, L.; Liang, J. A comprehensive charging network planning scheme for promoting EV charging infrastructure considering the Chicken-Eggs dilemma. Res. Transp. Econ. 2021, 88, 100837, ISSN 0739-8859. [Google Scholar] [CrossRef]
- He, Z.; Yang, X.; Wang, W.; Wu, D.; Ren, Y.; Cao, B.; Zhong, Y.; Su, S. Electric vehicle charging path planning considering the state of EV pile-road-grid. In Proceedings of the Seventh International Conference on Electromechanical Control Technology and Transportation (ICECTT 2022), Guangzhou, China, 26–28 May 2022; Volume 12302. [Google Scholar]
- Wang, G.; Xu, Z.; Wen, F.; Wong, K.P. Traffic-Constrained Multiobjective Planning of Electric-Vehicle Charging Stations. IEEE Trans. Power Deliv. 2013, 28, 2363–2372. [Google Scholar] [CrossRef]
- Hill, G.; Heidrich, O.; Creutzig, F.; Blythe, P. The role of electric vehicles in near-term mitigation pathways and achieving the UK’s carbon budget. Appl. Energy 2019, 251, 113111, ISSN 0306-2619. [Google Scholar] [CrossRef]
- Krause, J.; Thiel, C.; Tsokolis, D.; Samaras, Z.; Rota, C.; Ward, A.; Prenninger, P.; Coosemans, T.; Neugebauer, S.; Verhoeve, W. EU road vehicle energy consumption and CO2 emissions by 2050—Expert-based scenarios. Energy Policy 2020, 138, 111224, ISSN 0301-4215. [Google Scholar] [CrossRef]
- Rabiega, W.; Gorzałczyński, A.; Jeszke, R.; Mzyk, P.; Szczepański, K. How Long Will Combustion Vehicles Be Used? Polish Transport Sector on the Pathway to Climate Neutrality. Energies 2021, 14, 7871. [Google Scholar] [CrossRef]
- Pevec, D.; Babic, J.; Carvalho, A.; Ghiassi-Farrokhfal, Y.; Ketter, W.; Podobnik, V. Electric Vehicle Range Anxiety: An Obstacle for the Personal Transportation (R)evolution? In Proceedings of the 2019 4th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 18–21 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Akakpo, A.; Gyasi, E.A.; Oduro, B.; Akpabot, S. Foresight organization policies and management strategies in electric vehicle technology advances at tesla. In Futures Thinking and Organizational Policy; Springer: Berlin/Heidelberg, Germany, 2019; pp. 57–69. [Google Scholar]
- Mashhoodi, B.; van der Blij, N. Drivers’ range anxiety and cost of new EV chargers in Amsterdam: A scenario-based optimization approach. Ann. GIS 2021, 27, 87–98. [Google Scholar] [CrossRef]
- Pevec, D.; Babic, J.; Kayser, M.A.; Carvalho, A.; Ghiassi-Farrokhfal, Y.; Podobnik, V. A data-driven statistical approach for extending electric vehicle charging infrastructure. Int. J. Energy Res. 2018, 42, 3102–3120. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, Z.; Xing, Q.; Ji, Z.; Zhang, T. Evaluation of the multi-dimensional growth potential of China’s public charging facilities for electric vehicles through 2030. Util. Policy 2022, 75, 101344, ISSN 0957-1787. [Google Scholar] [CrossRef]
- Gnann, T.; Plötz, P.; Wietschel, M. Can public slow charging accelerate plug-in electric vehicle sales? A simulation of charging infrastructure usage and its impact on plug-in electric vehicle sales for Germany. Int. J. Sustain. Transp. 2019, 13, 7. [Google Scholar] [CrossRef]
- Hall, D.; Wappelhorst, S.; Mock, P.; Lutsey, N. European Electric Vehicle Factbook 2019/2020. 17 July 2020. Available online: https://theicct.org/wp-content/uploads/2021/06/EV-EU-Factbook-2020.pdf (accessed on 24 May 2022).
- García-Martínez, E.; Muñoz-Cruzado-Alba, J.; Sanz-Osorio, J.F.; Perié, J.M. Design and Experimental Validation of Power Electric Vehicle Emulator for Testing Electric Vehicle Supply Equipment (EVSE) with Vehicle-to-Grid (V2G) Capability. Appl. Sci. 2021, 11, 11496. [Google Scholar] [CrossRef]
- Mineeshma, G.R.; Bhavya, Y.V.; Chandrasekar, V. Electric Vehicle Supply Equipment: An Overview on Design Requirements as per AIS-138. In Proceedings of the 2022 2nd International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 21–22 January 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Shariff, S.M.; Alam, M.S.; Faraz, S.; Khan, M.A.; Abbas, A.; Amir, M. Economic Approach to Design of a Level 2 Residential Electric Vehicle Supply Equipment. In Advances in Power and Control Engineering; Singh, S., Pandey, R., Panigrahi, B., Kothari, D., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2020; Volume 609. [Google Scholar] [CrossRef]
- Trivedi, N.; Gujar, N.S.; Sarkar, S.; Pundir, S.P.S. Different fast charging methods and topologies for EV charging. In Proceedings of the 2018 IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- The European Standard IEC 62196. Available online: https://www.dalroad.com (accessed on 8 February 2022).
- Raff, R.; Golub, V.; Pelin, D.; Topić, D. Overview of charging modes and connectors for the electric vehicles. In Proceedings of the 2019 7th International Youth Conference on Energy (IYCE), Bled, Slovenia, 3–6 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- CHAdeMO Europe Installation. Available online: https://www.chademo.com/chademo-surpasses-20k-mark-with-europe-leading-in-installation/ (accessed on 8 February 2022).
- Arabsalmanabadi, B.; Tashakor, N.; Javadi, A.; Al-Haddad, K. Charging Techniques in Lithium-Ion Battery Charger: Review and New Solution. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5731–5738. [Google Scholar] [CrossRef]
- Hong, S.; Kang, M.; Jeong, H.; Baek, J. State of Health Estimation for Lithium-Ion Batteries Using Long-Term Recurrent Convolutional Network. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 1929–1934. [Google Scholar] [CrossRef]
- Maximum Speed on the Highway in Spain. Available online: https://www.aci.it/il-club/soci-in-viaggio/per-chi-va-allestero/guidare-in-europa/spagna.html (accessed on 15 March 2022).
- Travel Time Taken to Reach Malaga from Madrid. Available online: https://www.google.it/maps/dir/Madrid (accessed on 2 April 2022).
- Google Map Charging Stations—Google Maps. Available online: https://www.google.com/maps/search/google+map+electric+charging+stations/ (accessed on 23 June 2023).
- Szumska, E.M.; Jurecki, R. The Effect of Aggressive Driving on Vehicle Parameters. Energies 2020, 13, 6675. [Google Scholar] [CrossRef]
- Varia, M.V.; Duarte, G.O.; Varella, R.A.; Farias, T.L.; Baptista, P.C. How do road grade, road type and driving aggressiveness impact vehicle fuel consumption? Assessing potential fuel savings in Lisbon, Portugal. Transp. Res. Part D Transp. Environ. 2019, 72, 148–161. [Google Scholar]
- Liu, K.; Yamamoto, T.; Morikawa, T. Impact of road gradient on energy consumption of electric vehicles. Transp. Res. Part D Transp. Environ. 2017, 54, 74–81. [Google Scholar] [CrossRef]
- Traffic Flow Data in Spain. 2019. Available online: https://mapas.fomento.gob.es/mapatrafico (accessed on 10 April 2022).
- Passenger Cars in Use, by Fuel Type in Spain. 2019. Available online: https://www.acea.auto/figure/passenger-car-fleet-by-fuel-type (accessed on 1 February 2022).
- The Technical Data of Electric Vehicles, Declared by the Respective Car Manufacturers. Available online: https://www.e-station.it/guida-alle-auto-elettriche.html (accessed on 17 April 2022).
- How Temperature Affects EV Range. Available online: https://www.recurrentauto.com/research/how-temperature-affects-ev-range (accessed on 27 April 2022).
- Di Martino, A.; Miraftabzadeh, S.M.; Longo, M. Strategies for the Modelisation of Electric Vehicle Energy Consumption: A Review. Energies 2022, 15, 8115. [Google Scholar] [CrossRef]
- Estimation of the Driving Range. Available online: https://ev-database.org/#sort:path~type~order=.rank~number~desc|range-slider-range:prev~next=0~1200|range-slider-acceleration:prev~next=2~23|range-slider-topspeed:prev~next=110~350|range-slider-battery:prev~next=10~200|range-slider-towweight:prev~next=0~2500|range-slider-fastcharge:prev~next=0~1500|paging:currentPage=0|paging:number=9 (accessed on 27 April 2022).
- Saldarini, A.; Barelli, L.; Pelosi, D.; Miraftabzadeh, S.; Longo, M.; Yaici, W. Different Demand for Charging Infrastructure along a Stretch of Highway: Italian Case Study. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June 2022–1 July 2022; pp. 1–6. [Google Scholar]
- Colombo, C.G.; Miraftabzadeh, S.M.; Saldarini, A.; Longo, M.; Brenna, M.; Yaici, W. Literature Review on Wireless Charging Technologies: Future Trend for Electric Vehicle? In Proceedings of the 2022 Second International Conference on Sustainable Mobility Applications, Renewables and Technology (SMART), Cassino, Italy, 23–25 November 2022; pp. 1–5. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | Charging Mode Selected | ||
|---|---|---|---|
| 1° Method | CS = AC ˄ EV = AC ˄ DC | AC | |
| 2° Method | CS = AC ˄ EV = AC | AC | |
| CS = DC ˄ EV = DC | DC |
| Section’s Trip | Slope [%] | Parameter [kWh/km] | Distance [km] | Consumption [kWh] | |
|---|---|---|---|---|---|
| Madrid to 1 | −1.4 | −0.073 | 6.4 |  | −0.467 |
| 3 to 4 | −1.1 | −0.073 | 1.5 | −0.109 | |
| 12 to 13 | −1.1 | −0.073 | 2.2 | −0.160 | |
| 15 to 16 | −3.3 | −0.121 | 5 | −0.605 | |
| 22 to Malaga | −1.7 | −0.073 | 26.9 | −1.963 | |
| Tot: | −3.3 |
| Model | Matriculation (%) | Capacity (kWh) | Driving Range (km) | Charging DC (kW) | Charging AC (kW) |
|---|---|---|---|---|---|
| Tesla: | |||||
| Model 3 | 8 | 75 | 560 | 120 | 11 |
| Volkswagen: | |||||
| E-Up | 8 | 36.8 | 260 | 40 | 7.4 |
| e-Golf | 6 | 35.8 | 300 | 50 | 7.4 |
| ID.3 | 7 | 58 | 420 | 100 | 11 |
| Renault: | |||||
| Zoe | 18 | 41 | 370 | \ | 44 |
| Nissan: | |||||
| Leaf | 15 | 40 | 270 | 50 | 7.4 |
| MINI: | |||||
| Cooper SE | 9 | 32.6 | 261 | 50 | 11 |
| KIA: | |||||
| e-Niro | 16 | 64 | 455 | 70 | 11 |
| Hyundai: | |||||
| Kona | 6 | 64 | 484 | 100 | 11 |
| Seat: | |||||
| Mii | 7 | 35.8 | 250 | 40 | 7.4 |
| Charging Stations | No Charging Points—Before Optimization | No Charging Points—After Optimization | Charging Stations | No Charging Points—Before Optimization | No Charging Points—After Optimization |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 14 | 1 | 1 |
| 2 | 2 | 2 | 15 | 1 | 1 |
| 3 | 2 | 2 | 16 | 1 | 1 |
| 4 | 8 | 8 | 17 | 1 | 2 |
| 5 | 1 | 1 | 18 | 10 | 10 |
| 6 | 2 | 2 | 19 | 1 | 1 |
| 7 | 1 | 1 | 20 | 1 | 2 |
| 8 | 2 | 2 | 21 | null | 2 |
| 9 | null | 3 | 22 | 2 | 2 |
| 10 | 1 | 2 | 23 | 1 | 4 |
| 11 | 4 | 4 | 24 | 1 | 1 |
| 12 | 1 | 1 | 25 | null | 2 |
| 13 | 2 | 2 | 26 | 2 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saldarini, A.; Miraftabzadeh, S.M.; Brenna, M.; Longo, M. Strategic Approach for Electric Vehicle Charging Infrastructure for Efficient Mobility along Highways: A Real Case Study in Spain. Vehicles 2023, 5, 761-779. https://doi.org/10.3390/vehicles5030042
Saldarini A, Miraftabzadeh SM, Brenna M, Longo M. Strategic Approach for Electric Vehicle Charging Infrastructure for Efficient Mobility along Highways: A Real Case Study in Spain. Vehicles. 2023; 5(3):761-779. https://doi.org/10.3390/vehicles5030042
Chicago/Turabian StyleSaldarini, Alessandro, Seyed Mahdi Miraftabzadeh, Morris Brenna, and Michela Longo. 2023. "Strategic Approach for Electric Vehicle Charging Infrastructure for Efficient Mobility along Highways: A Real Case Study in Spain" Vehicles 5, no. 3: 761-779. https://doi.org/10.3390/vehicles5030042
APA StyleSaldarini, A., Miraftabzadeh, S. M., Brenna, M., & Longo, M. (2023). Strategic Approach for Electric Vehicle Charging Infrastructure for Efficient Mobility along Highways: A Real Case Study in Spain. Vehicles, 5(3), 761-779. https://doi.org/10.3390/vehicles5030042