
Application of the DMD Approach to High-Reynolds-Number Flow over an Idealized Ground Vehicle


Abstract
1. Introduction
2. DMD Mathematical Framework
3. Methodology
3.1. CFD Simulation Process Details
3.2. Geometry, Domain, and Boundary Conditions
3.3. Discretization Scheme
3.4. Workflow for DMD Analyses
- Step 1: Collect multiple time snapshots of the system of interest.
- Step 2: Create a low-dimensional subspace using the SVD or Truncated SVD (TSVD) method.
- Step 3: Obtain an eigen decomposition of the low-dimensional subspace.
- Step 4: Using the eigen decomposed low-dimensional subspace, assemble the mode shapes and their associated oscillation frequencies, called the “Time Dynamics” (TD).
- Step 5: Use the mode shapes and TD to assemble the DMD output equations.
- Step 6: Use the DMD solution to predict (or reconstruct) the flow field.
3.5. Data Collection Strategy
4. Results
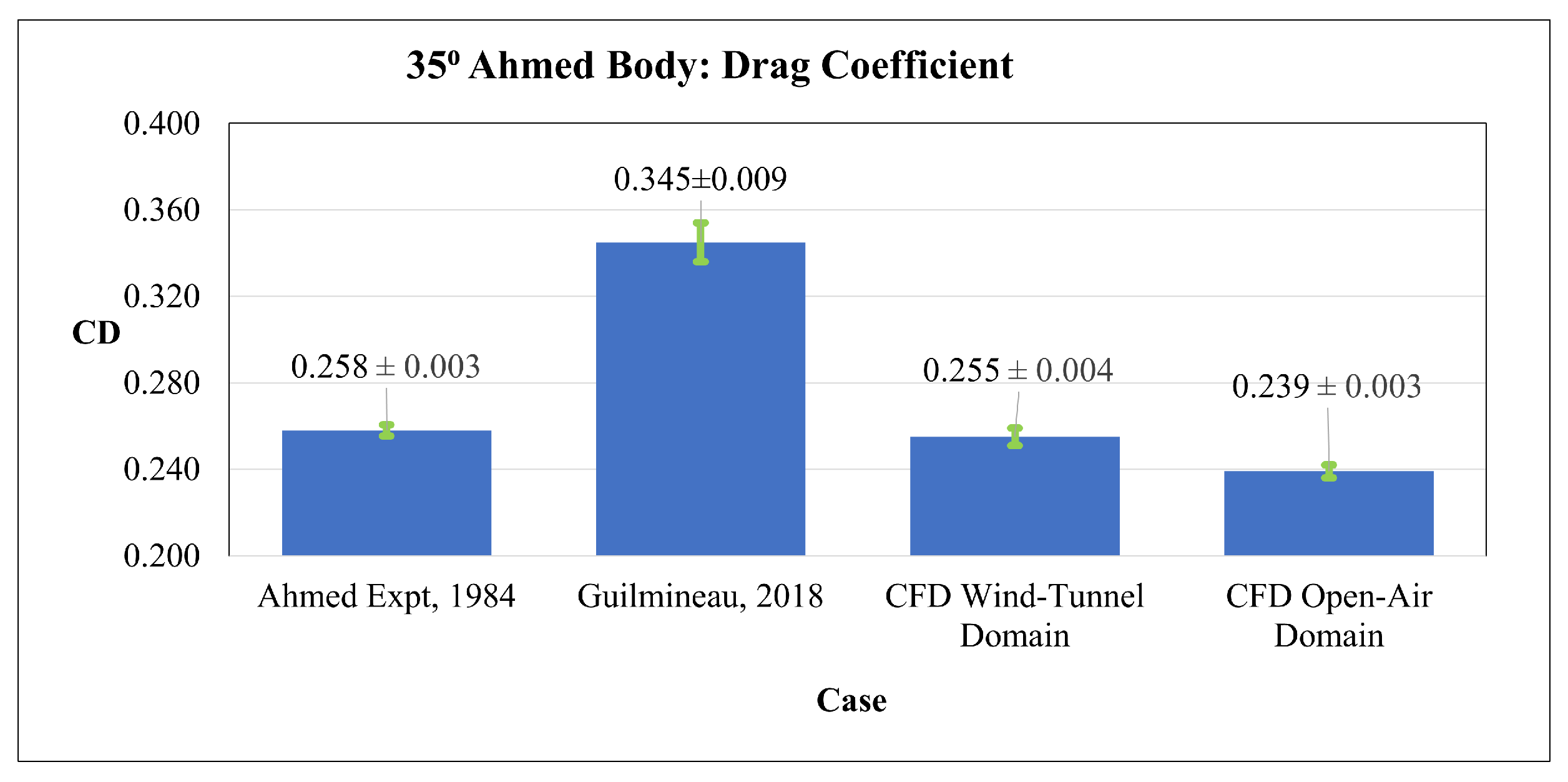
4.1. Validation of CFD Simulation Process
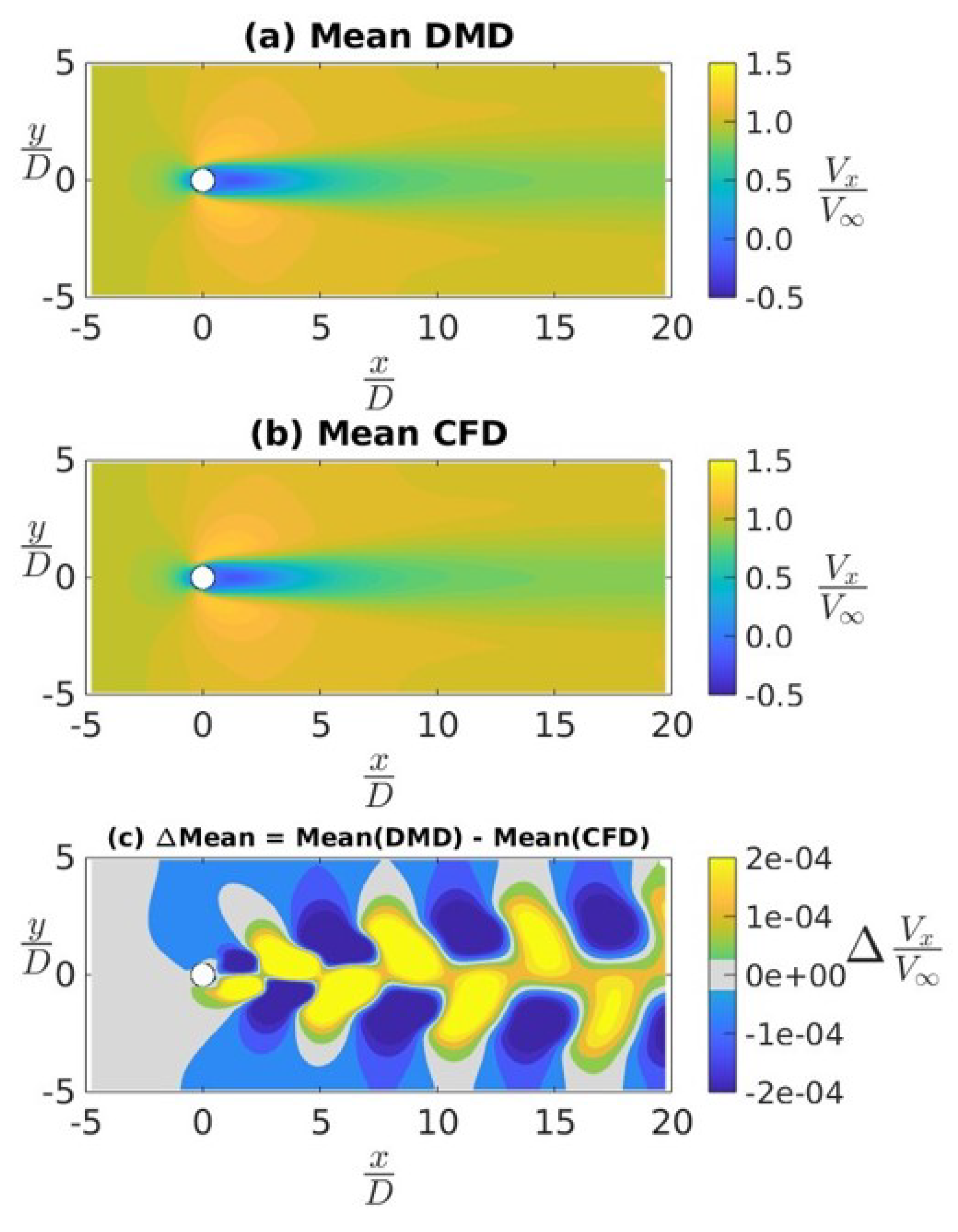
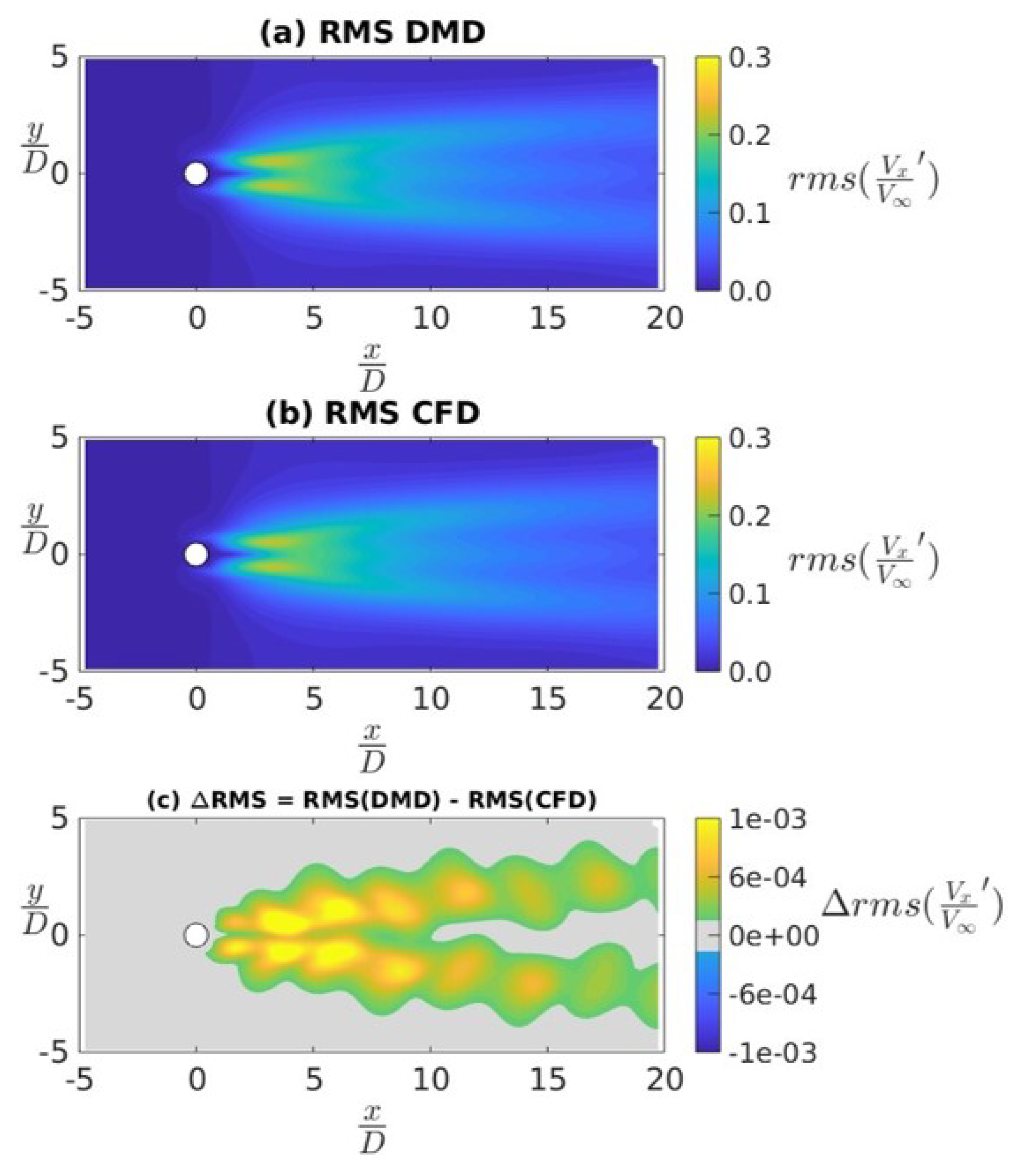
4.2. Application of DMD to a Canonical Flow Case
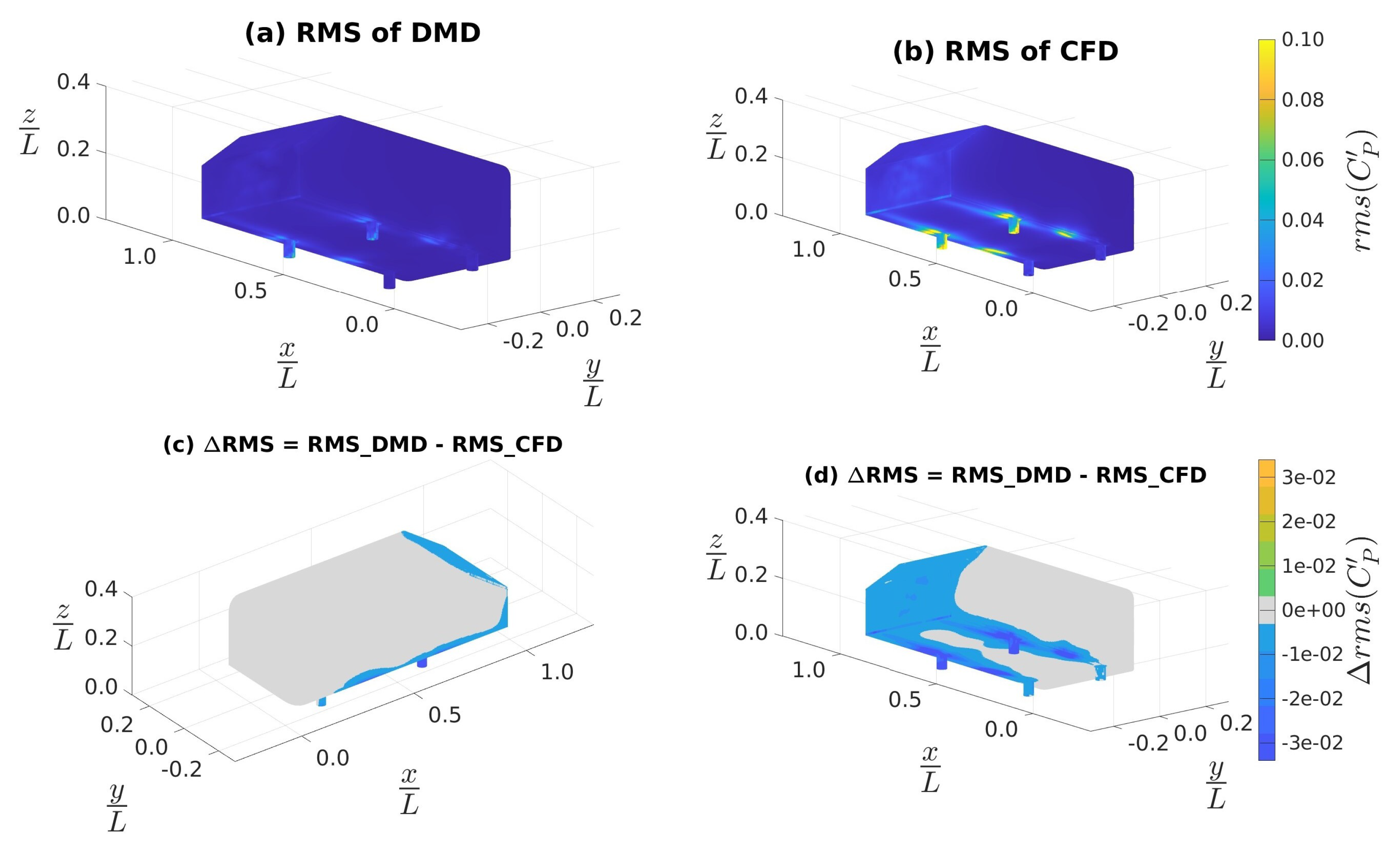
4.3. Ahmed Body Simulations
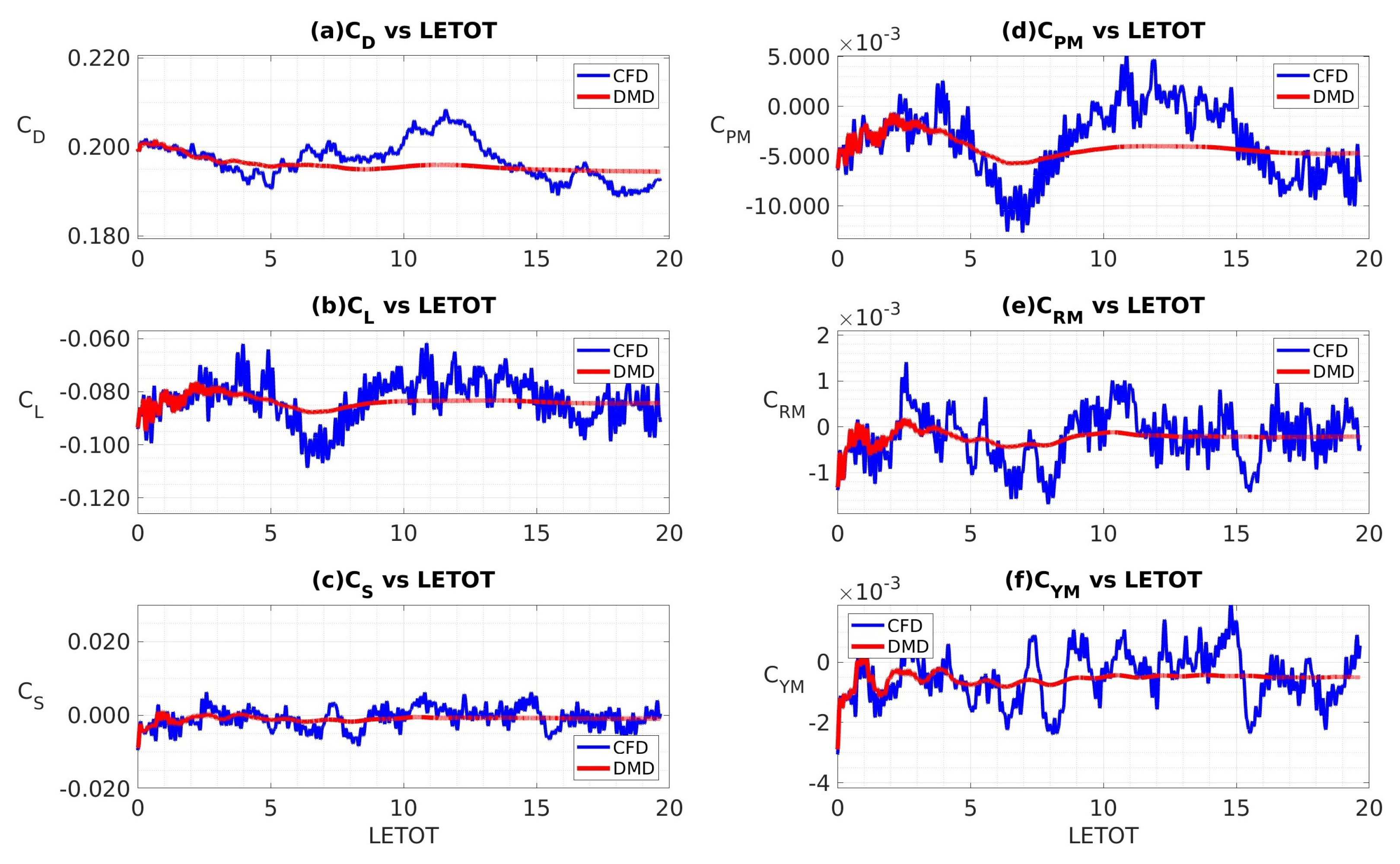
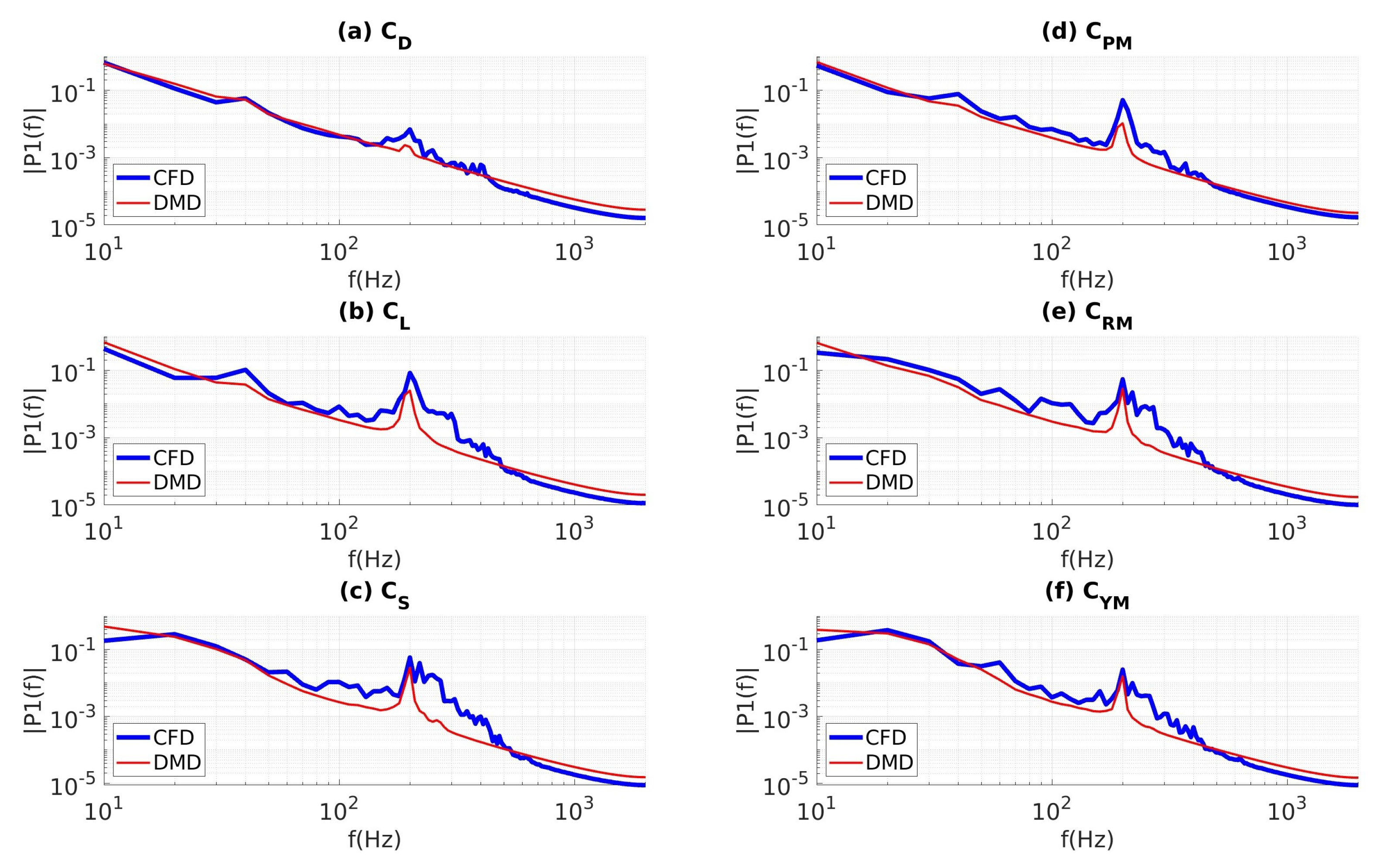
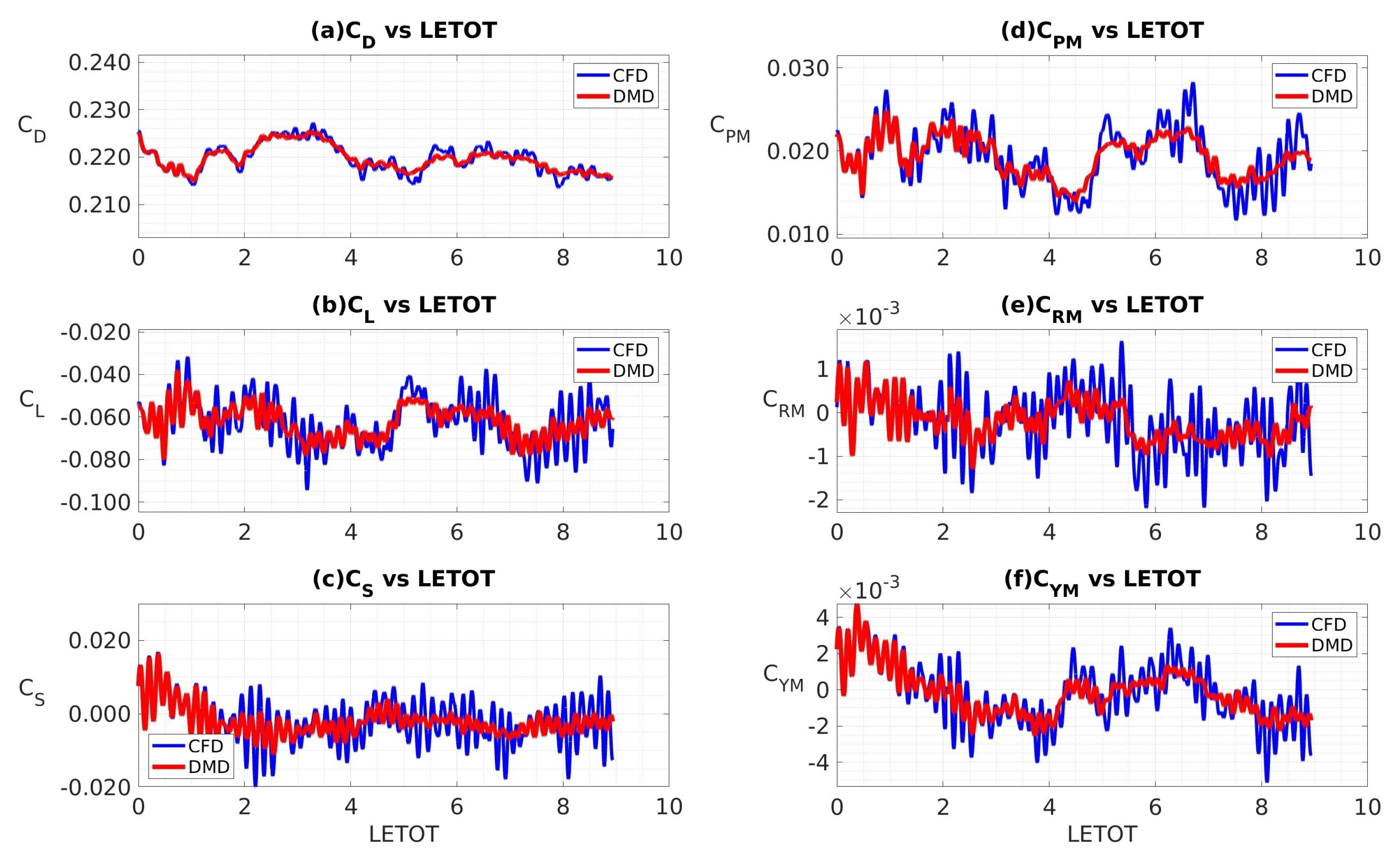
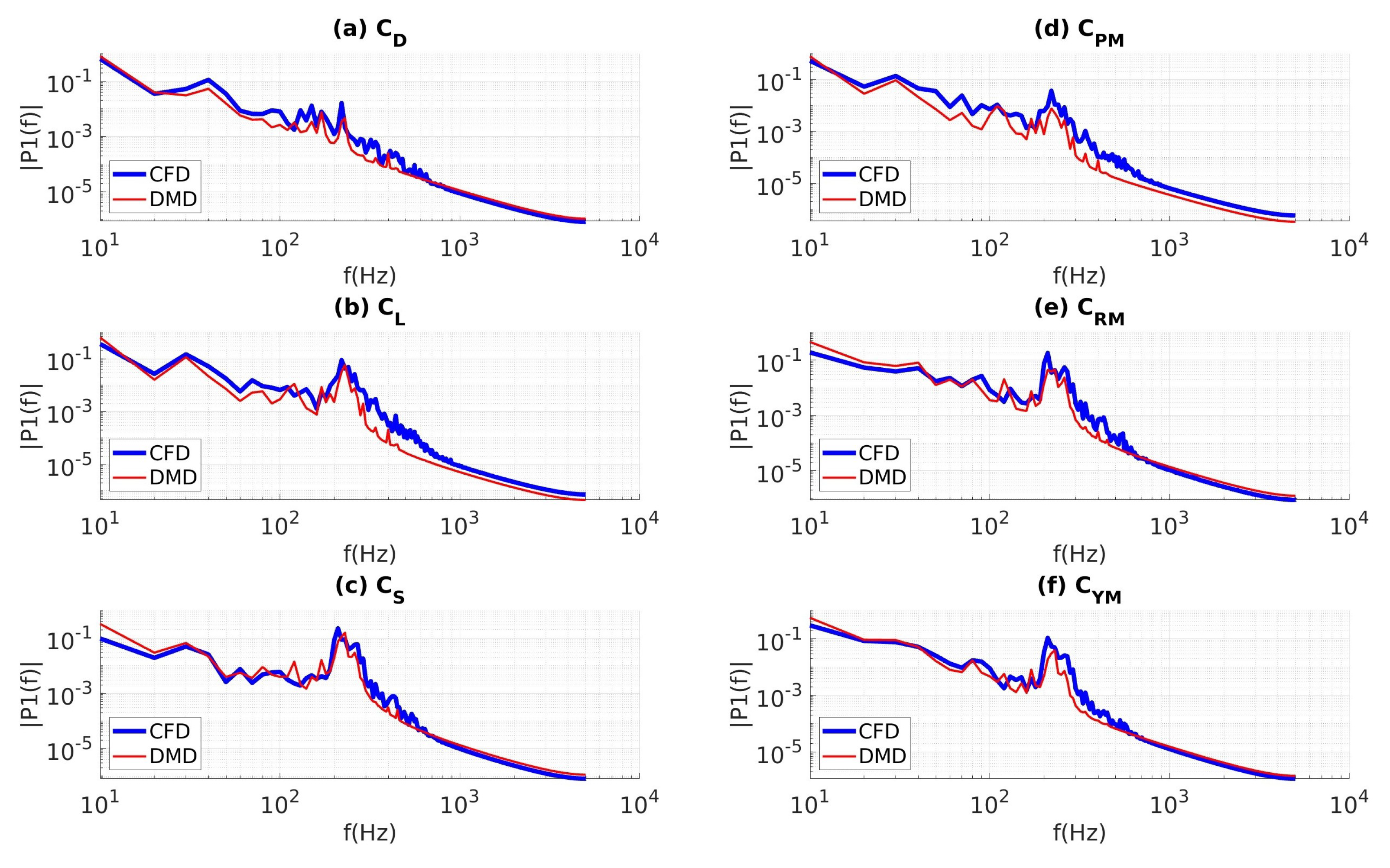
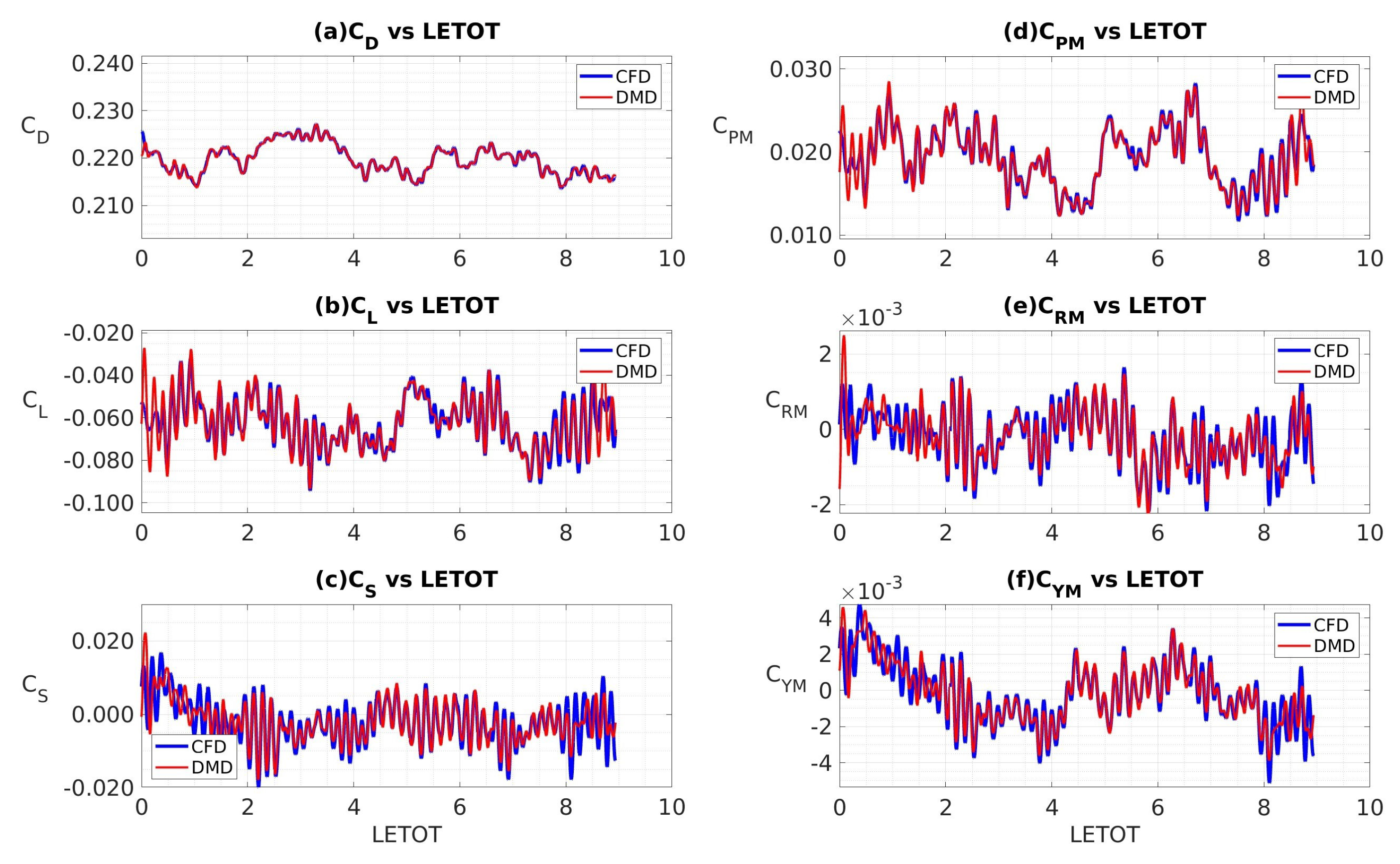
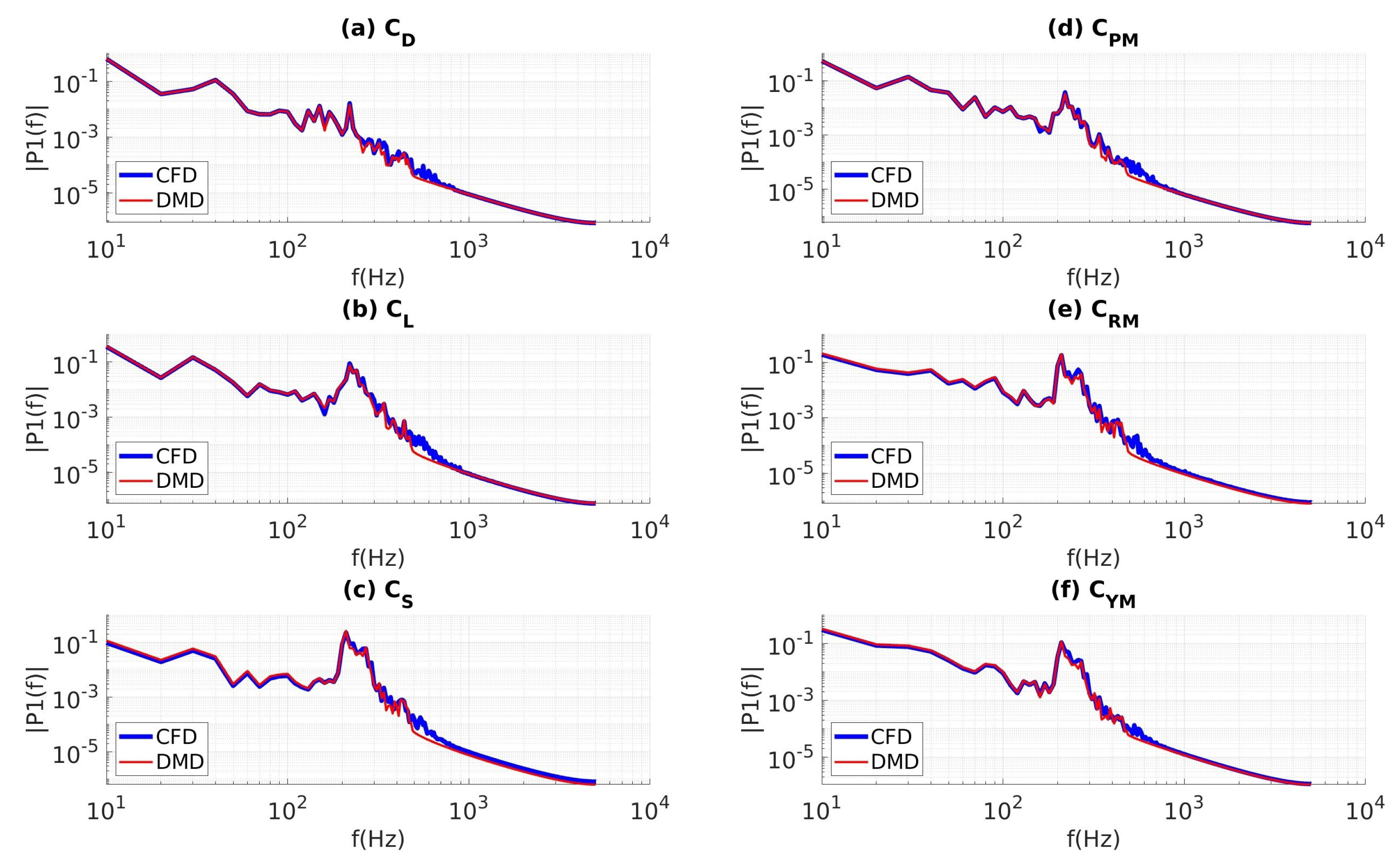
4.3.1. Effectiveness of the DMD Approach Using CFD Data Sampled at 4 kHz
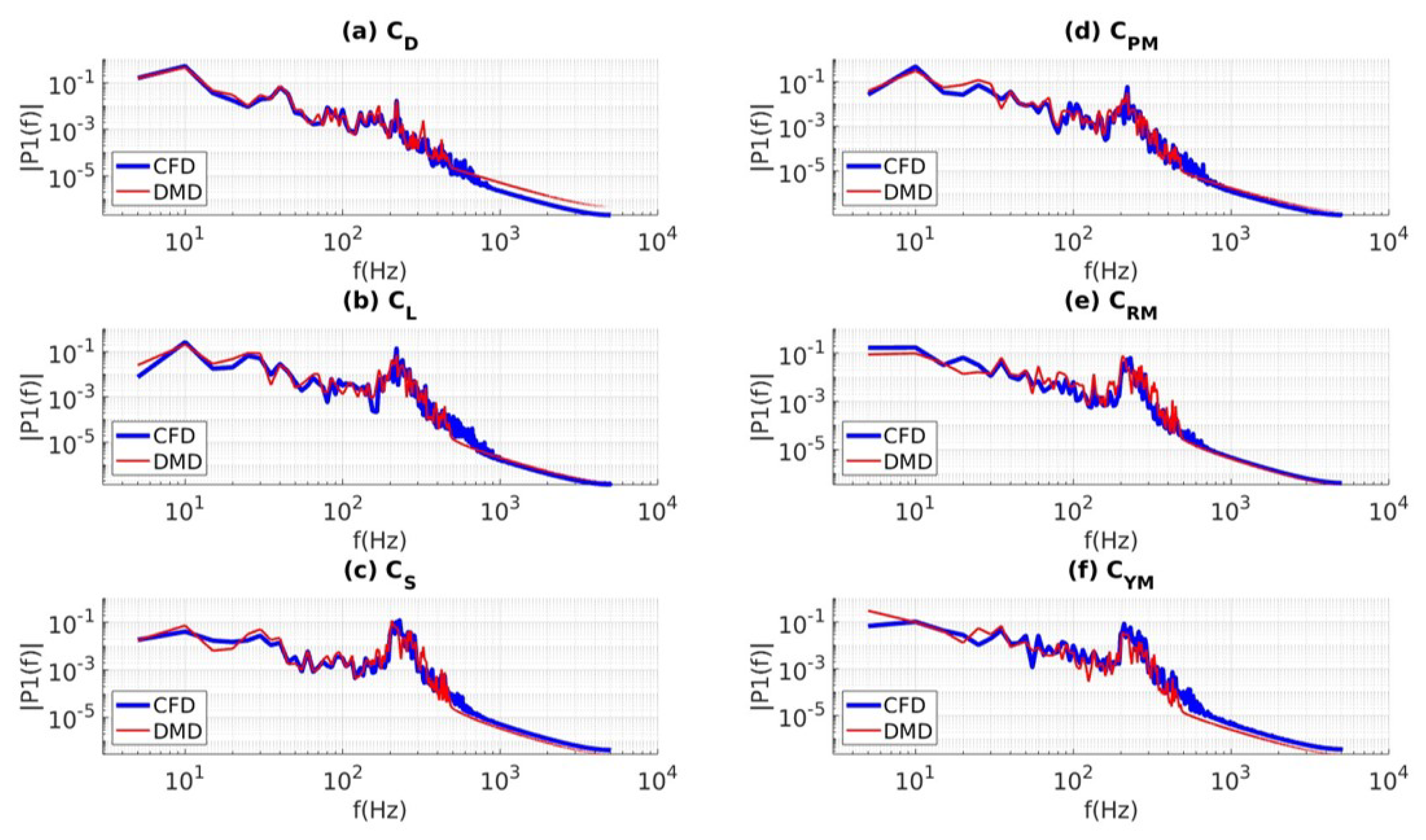
4.3.2. Effectiveness of the DMD Approach Using CFD Data Sampled at 10 kHz
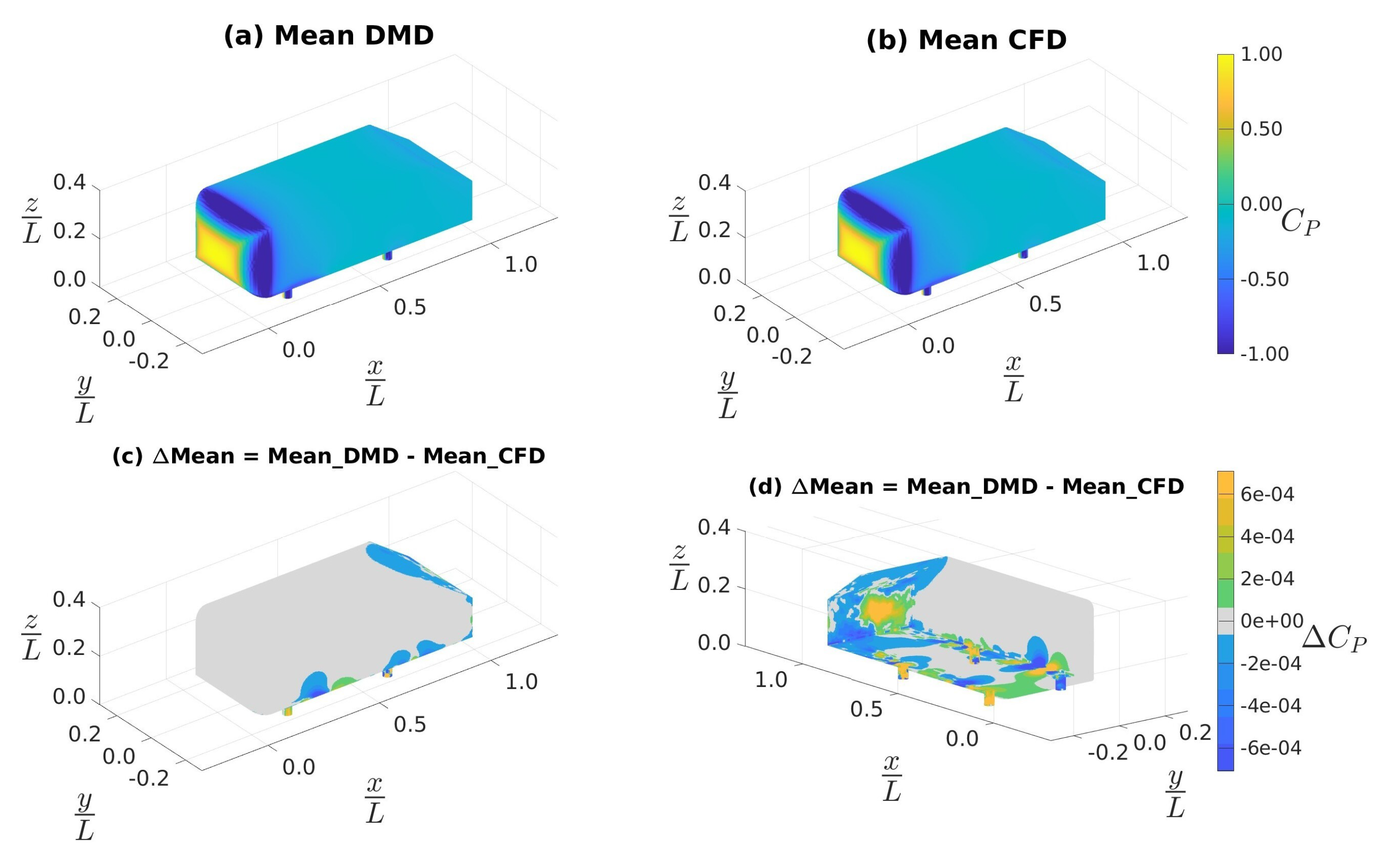
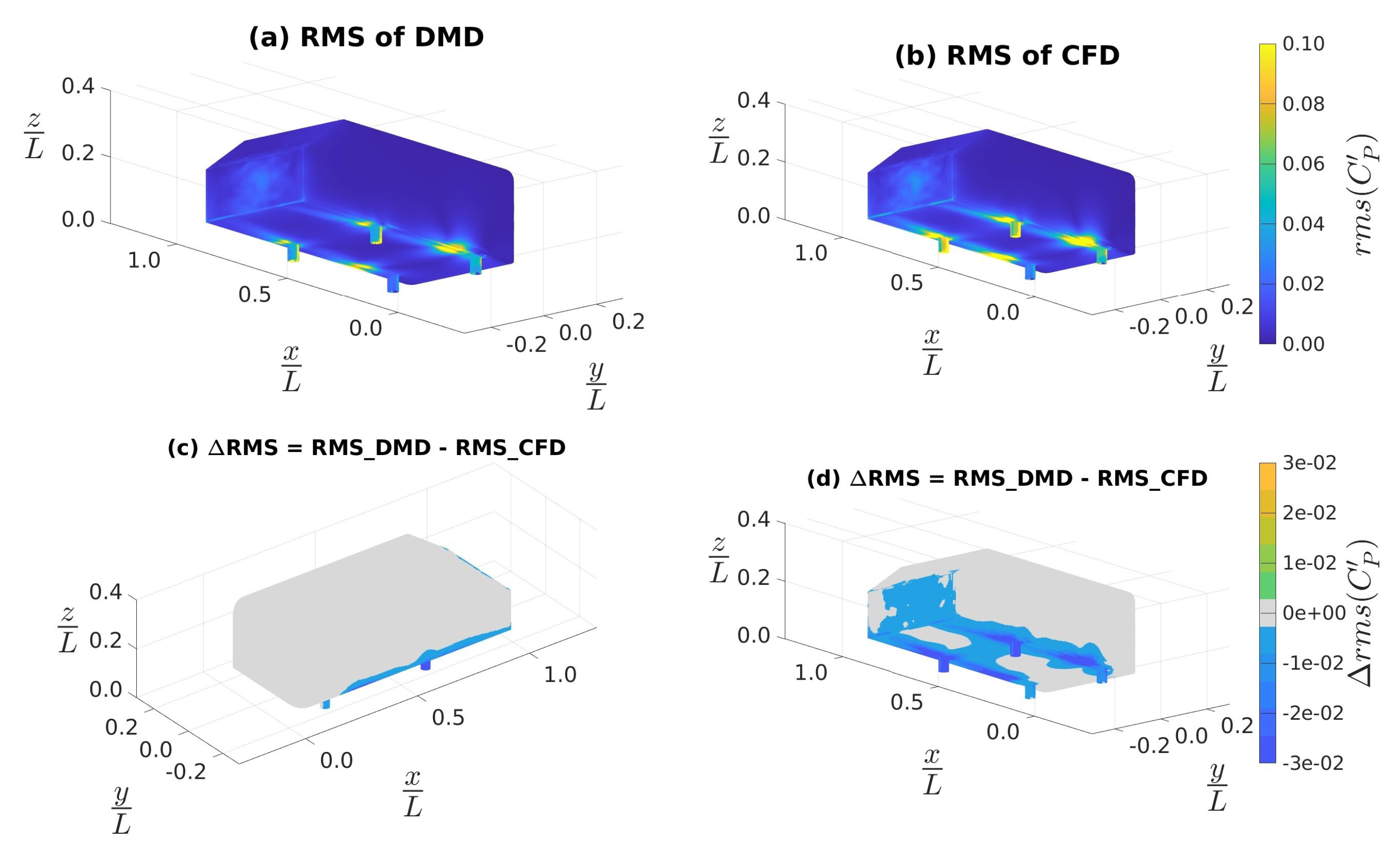
4.3.3. Custom Filtering with Data Sampled at 10 kHz
- The first filter was a low-pass filter applied to the modes, identified based on their maximum instantaneous amplitude in the time dynamics term as obtained from Equation (5). The modes with a maximum instantaneous amplitude greater than of the zero-frequency mode were removed.
- The second filter was applied to the modes based on their frequency and their amplitude, given by the RMS version of Equation (14). The second filter was designed to remove high-frequency modes with non-physically excessive energy. To accomplish this, the modes were plotted in frequency space against the amplitudes; among the high-frequency modes ( Hz), the spurious modes were identified using a clustering-based anomaly-detection algorithm. Outliers were defined as modes with an amplitude greater than a moving mean of 10 samples by more than a single local standard deviation. The outliers thus identified had their associated modes removed.
- The third filter was designed to remove modes that contribute negligible energy to the system. The remaining modes were sorted based on their contribution toward the total cumulative energy in the system. In this example, modes contributing collectively less than to total energy were removed; we suspect that these modes may arise from the numerical noise. However, this aspect and the effects of the mode cut-off energy limit need to be further investigated.
4.4. Future State Predictions Using DMD
4.5. A Note on Computational Resource Requirements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CFD | Computational Fluid Dynamics |
| DDES | Delayed Detached Eddy Simulation |
| DES | Detached Eddy Simulation |
| DMD | Dynamic Mode Decomposition |
| DNS | Direct Numerical Simulation |
| GV | Ground Vehicle |
| GVSC | Ground Vehicles Systems Center |
| IDDES | Improved Delayed Detached Eddy Simulation |
| LES | Large Eddy Simulation |
| POD | Proper Orthogonal Decomposition |
| PSD | Power Spectral Density |
| RANS | Reynolds-Averaged Navier–Stokes |
| Reynolds Number | |
| RMS | Root Mean Squared |
| ROM | Reduced Order Method |
| SGS | Sub Grid Scale |
| SRS | Scale Resolved Simulation |
| SST | Shear Stress Transport |
| SVD | Singular Value Decomposition |
| TD | Time Dynamics |
| VWT | Virtual Wind Tunnel |
| WT | Wind Tunnel |
References
- Ahani, H.; Nielsen, J.; Uddin, M. The Proper Orthogonal and Dynamic Mode Decomposition of Wake behind a Fastback DrivAer Model; SAE WCX Technical Paper Number 2022-01-0888; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Ikeda, J.; Matsumoto, D.; Tsubokura, M.; Uchida, M.; Hasegawa, T.; Kobayashi, R. Dynamic mode decomposition of flow around a full-scale road vehicle using unsteady CFD. In Proceedings of the 34th AIAA Applied Aerodynamics Conference, Washington, DC, USA, 13–17 June 2016; p. 3727. [Google Scholar]
- Jacuzzi, E.; Granlund, K. Passive flow control for drag reduction in vehicle platoons. J. Wind Eng. Ind. Aerodyn. 2019, 189, 104–117. [Google Scholar] [CrossRef]
- Mohammadikalakoo, B.; Schito, P.; Mani, M. Passive flow control on Ahmed body by rear linking tunnels. J. Wind Eng. Ind. Aerodyn. 2020, 205, 104330. [Google Scholar] [CrossRef]
- Hanfeng, W.; Yu, Z.; Chao, Z.; Xuhui, H. Aerodynamic drag reduction of an Ahmed body based on deflectors. J. Wind Eng. Ind. Aerodyn. 2016, 148, 34–44. [Google Scholar] [CrossRef]
- Siddiqui, N.; Chaab, M. A simple passive device for the drag reduction of an Ahmed body. J. Appl. Fluid Mech. 2020, 14, 147–164. [Google Scholar]
- Tian, J.; Zhang, Y.; Zhu, H.; Xiao, H. Aerodynamic drag reduction and flow control of Ahmed body with flaps. Adv. Mech. Eng. 2017, 9, 1687814017711390. [Google Scholar] [CrossRef]
- Zhang, B.; Liu, K.; Zhou, Y.; To, S.; Tu, J. Active drag reduction of a high-drag Ahmed body based on steady blowing. J. Fluid Mech. 2018, 856, 351–396. [Google Scholar] [CrossRef]
- Joseph, P.; Amandolese, X.; Aider, J.L. Drag reduction on the 25° slant angle Ahmed reference body using pulsed jets. Exp. Fluids 2012, 52, 1169–1185. [Google Scholar] [CrossRef]
- Joseph, P.; Amandolese, X.; Edouard, C.; Aider, J.L. Flow control using MEMS pulsed micro-jets on the Ahmed body. Exp. Fluids 2013, 54, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Cui, W.; Jia, Q.; Li, Q.; Yang, Z.; Morzyński, M.; Noack, B.R. Explorative gradient method for active drag reduction of the fluidic pinball and slanted Ahmed body. J. Fluid Mech. 2022, 932, A7. [Google Scholar] [CrossRef]
- Bruneau, C.H.; Creusé, E.; Depeyras, D.; Gilliéron, P.; Mortazavi, I. Coupling active and passive techniques to control the flow past the square back Ahmed body. Comput. Fluids 2010, 39, 1875–1892. [Google Scholar] [CrossRef]
- Sudin, M.N.; Abdullah, M.A.; Shamsuddin, S.A.; Ramli, F.R.; Tahir, M.M. Review of research on vehicles aerodynamic drag reduction methods. Int. J. Mech. Mechatron. Eng. 2014, 14, 37–47. [Google Scholar]
- Mukut, A.M.I.; Abedin, M.Z. Review on aerodynamic drag reduction of vehicles. Int. J. Eng. Mater. Manuf. 2019, 4, 1–14. [Google Scholar] [CrossRef]
- Bounds, C.P.; Rajasekar, S.; Uddin, M. Development of a Numerical Investigation Framework for Ground Vehicle Platooning. Fluids 2021, 6, 404. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, T.; Yan, F.; Qiao, S.; Wang, X. Analysis and design on intervehicle distance control of autonomous vehicle platoons. ISA Trans. 2020, 100, 446–453. [Google Scholar] [CrossRef]
- Sivanandham, S.; Gajanand, M. Platooning for sustainable freight transportation: An adoptable practice in the near future? Transp. Rev. 2020, 40, 581–606. [Google Scholar] [CrossRef]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Dynamic mode decomposition with control. SIAM J. Appl. Dyn. Syst. 2016, 15, 142–161. [Google Scholar] [CrossRef]
- Tennekes, H.; Lumley, J.L. A First Course in Turbulence; MIT Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Liu, K.; Zhang, B.; Zhang, Y.; Zhou, Y. Flow structure around a low-drag Ahmed body. J. Fluid Mech. 2021, 913, A21. [Google Scholar] [CrossRef]
- Misar, A.S.; Uddin, M.; Pandaleon, T.; Wilson, J. Scale-Resolved and Time-Averaged Simulations of the Flow over a NASCAR Cup Series Racecar; SAE WCX Technical Paper Number 2023-01-0735; SAE International: Warrendale, PA, USA, 2023. [Google Scholar]
- Guilmineau, E.; Deng, G.; Leroyer, A.; Queutey, P.; Visonneau, M.; Wackers, J. Assessment of hybrid RANS-LES formulations for flow simulation around the Ahmed body. Comput. Fluids 2018, 176, 302–319. [Google Scholar] [CrossRef]
- Ashton, N.; West, A.; Lardeau, S.; Revell, A. Assessment of RANS and DES methods for realistic automotive models. Comput. Fluids 2016, 128, 1–15. [Google Scholar] [CrossRef]
- Kutz, J.N.; Brunton, S.L.; Brunton, B.W.; Proctor, J.L. Dynamic Mode Decomposition: Data-Driven Modeling of Complex Systems; SIAM: Philadelphia, PA, USA, 2016. [Google Scholar]
- Schmid, P.J. Dynamic mode decomposition and its variants. Annu. Rev. Fluid Mech. 2022, 54, 225–254. [Google Scholar] [CrossRef]
- Schmidt, O.T.; Colonius, T. Guide to spectral proper orthogonal decomposition. AIAA J. 2020, 58, 1023–1033. [Google Scholar] [CrossRef]
- Muld, T.W.; Efraimsson, G.; Henningson, D.S. Flow structures around a high-speed train extracted using proper orthogonal decomposition and dynamic mode decomposition. Comput. Fluids 2012, 57, 87–97. [Google Scholar] [CrossRef]
- Sieber, M.; Paschereit, C.O.; Oberleithner, K. Spectral proper orthogonal decomposition. J. Fluid Mech. 2016, 792, 798–828. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Taira, K.; Brunton, S.L.; Dawson, S.T.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Modal analysis of fluid flows: An overview. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Schmid, P.J.; Li, L.; Juniper, M.P.; Pust, O. Applications of the dynamic mode decomposition. Theor. Comput. Fluid Dyn. 2011, 25, 249–259. [Google Scholar] [CrossRef]
- Schmid, P.J.; Violato, D.; Scarano, F. Decomposition of time-resolved tomographic PIV. Exp. Fluids 2012, 52, 1567–1579. [Google Scholar] [CrossRef]
- Wynn, A.; Pearson, D.; Ganapathisubramani, B.; Goulart, P.J. Optimal mode decomposition for unsteady flows. J. Fluid Mech. 2013, 733, 473–503. [Google Scholar] [CrossRef]
- Sakai, M.; Sunada, Y.; Imamura, T.; Rinoie, K. Experimental and numerical flow analysis around circular cylinders using POD and DMD. In Proceedings of the 44th AIAA Fluid Dynamics Conference, Atlanta, GA, USA, 16–20 June 2014; p. 3325. [Google Scholar]
- Hemati, M.S.; Rowley, C.W.; Deem, E.A.; Cattafesta, L.N. De-biasing the dynamic mode decomposition for applied Koopman spectral analysis of noisy datasets. Theor. Comput. Fluid Dyn. 2017, 31, 349–368. [Google Scholar] [CrossRef]
- Erichson, N.B.; Mathelin, L.; Kutz, J.N.; Brunton, S.L. Randomized dynamic mode decomposition. SIAM J. Appl. Dyn. Syst. 2019, 18, 1867–1891. [Google Scholar] [CrossRef]
- Jovanović, M.R.; Schmid, P.J.; Nichols, J.W. Sparsity-promoting dynamic mode decomposition. Phys. Fluids 2014, 26, 024103. [Google Scholar] [CrossRef]
- Guéniat, F.; Mathelin, L.; Pastur, L.R. A dynamic mode decomposition approach for large and arbitrarily sampled systems. Phys. Fluids 2015, 27, 025113. [Google Scholar] [CrossRef]
- Mengmeng, W.; Zhonghua, H.; Han, N.; Wenping, S.; Le Clainche, S.; Ferrer, E. A transition prediction method for flow over airfoils based on high-order dynamic mode decomposition. Chin. J. Aeronaut. 2019, 32, 2408–2421. [Google Scholar]
- Qiu, R.; Huang, R.; Wang, Y.; Huang, C. Dynamic mode decomposition and reconstruction of transient cavitating flows around a Clark-Y hydrofoil. Theor. Appl. Mech. Lett. 2020, 10, 327–332. [Google Scholar] [CrossRef]
- Heft, A.I.; Indinger, T.; Adams, N.A. Experimental and numerical investigation of the DrivAer model. In Fluids Engineering Division Summer Meeting; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 44755, pp. 41–51. [Google Scholar]
- Matsumoto, D.; Haag, L.; Indinger, T. Investigation of the unsteady external and underhood airflow of the DrivAer model by dynamic mode decomposition methods. Int. J. Autom. Eng. 2017, 8, 55–62. [Google Scholar] [CrossRef]
- Ahmed, S.R.; Ramm, G.; Faltin, G. Some salient features of the time-averaged ground vehicle wake. SAE Trans. 1984, 93, 473–503. [Google Scholar]
- Uddin, M.; Nichols, S.; Hahn, C.; Misar, A.; Desai, S.; Tison, N.; Korivi, V. Aerodynamics of Landing Maneuvering of an Unmanned Aerial Vehicle in Close Proximity to a Ground Vehicle; SAE Technical Paper 2023-01-0118; SAE International: Warrendale, PA, USA, 2023. [Google Scholar]
- Lienhart, H.; Becker, S. Flow and turbulence structure in the wake of a simplified car model. SAE Trans. 2003, 112, 785–796. [Google Scholar]
- Misar, A. Insight into the Aerodynamics of Race and Idealized Road Vehicles Using Scale-Resolved and Scale-Averaged CFD Simulations. Ph.D. Thesis, The University of North Carolina at Charlotte, Charlotte, NC, USA, 2023. [Google Scholar]
- Dylewsky, D.; Tao, M.; Kutz, J.N. Dynamic mode decomposition for multiscale nonlinear physics. Phys. Rev. E 2019, 99, 063311. [Google Scholar] [CrossRef]
- Tu, J.H. Dynamic Mode Decomposition: Theory and Applications. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 2013. [Google Scholar]
- Kou, J.; Zhang, W. An improved criterion to select dominant modes from dynamic mode decomposition. Eur. J. Mech. B Fluids 2017, 62, 109–129. [Google Scholar] [CrossRef]
- Misar, A.S.; Uddin, M. Effects of Solver Parameters and Boundary Conditions on RANS CFD Flow Predictions over a Gen-6 NASCAR Racecar; SAE WCX Technical Paper 2022-01-0372; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Shur, M.L.; Spalart, P.R.; Strelets, M.K.; Travin, A.K. A hybrid RANS-LES approach with delayed-DES and wall-modelled LES capabilities. Int. J. Heat Fluid Flow 2008, 29, 1638–1649. [Google Scholar] [CrossRef]
- Gritskevich, M.S.; Garbaruk, A.V.; Schütze, J.; Menter, F.R. Development of DDES and IDDES formulations for the k-ω shear stress transport model. Flow Turbul. Combust. 2012, 88, 431. [Google Scholar] [CrossRef]
- Spalart, P.R. Comments on the Feasibility of LES for Wings and on the Hybrid RANS/LES Approach. In Proceedings of the First AFOSR International Conference on DNS/LES, Ruston, LA, USA, 4–8 August 1997; pp. 137–147. [Google Scholar]
- Spalart, P.R.; Streett, C. Young-Person’s Guide to Detached-Eddy Simulation Grids; 21076-1320; NASA STI Help Desk, NASA Center for AeroSpace Information: Hanover, MD, USA, 2001.
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A new version of detached-eddy simulation, resistant to ambiguous grid densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Piomelli, U.; Balaras, E. Wall-layer models for large-eddy simulations. Annu. Rev. Fluid Mech. 2002, 34, 349–374. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Menter, F. Zonal two equation kω turbulence models for aerodynamic flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993; p. 2906. [Google Scholar]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Zhang, C.; Bounds, C.P.; Foster, L.; Uddin, M. Turbulence modeling effects on the CFD predictions of flow over a detailed full-scale sedan vehicle. Fluids 2019, 4, 148. [Google Scholar] [CrossRef]
- Aultman, M.; Wang, Z.; Duan, L. Effect of time-step size on flow around generic car models. J. Wind Eng. Ind. Aerodyn. 2021, 219, 104764. [Google Scholar] [CrossRef]
- Misar, A.S.; Bounds, C.; Ahani, H.; Zafar, M.U.; Uddin, M. On the Effects of Parallelization on the Flow Prediction around a Fastback DrivAer Model at Different Attitudes; SAE WCX Technical Paper 2021-01-0965; SAE International: Warrendale, PA, USA, 2021. [Google Scholar]
- Daily, J.W.; James, W.; Harleman, D.R. Fluid Dynamics; Addison-Wesley: London, UK, 1966. [Google Scholar]
- Fu, C.; Bounds, C.P.; Selent, C.; Uddin, M. Turbulence modeling effects on the aerodynamic characterizations of a NASCAR Generation 6 racecar subject to yaw and pitch changes. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2019, 233, 3600–3620. [Google Scholar] [CrossRef]
- Hunt, J.C.; Wray, A.A.; Moin, P. Eddies, streams, and convergence zones in turbulent flows. In Studying Turbulence Using Numerical Simulation Databases, 2. Proceedings of the 1988 Summer Program; Center for Turbulence Research: Stanford, CA, USA, 1988. [Google Scholar]
- Fu, C.; Uddin, M.; Zhang, C. Computational Analyses of the Effects of Wind Tunnel Ground Simulation and Blockage Ratio on the Aerodynamic Prediction of Flow over a Passenger Vehicle. Vehicles 2020, 2, 318–341. [Google Scholar] [CrossRef]
- Altinisik, A.; Kutukceken, E.; Umur, H. Experimental and numerical aerodynamic analysis of a passenger car: Influence of the blockage ratio on drag coefficient. J. Fluids Eng. 2015, 137, 081104. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Value from CFD | 0.220 | −0.062 | −0.002 | 0.019 | 0.000 | 0.000 |
| Mean Value from DMD | 0.220 | −0.062 | −0.002 | 0.019 | 0.000 | 0.000 |
| RMS Value from CFD | 0.003 | 0.012 | 0.006 | 0.004 | 0.002 | 0.001 |
| RMS Value from DMD | 0.003 | 0.012 | 0.006 | 0.004 | 0.001 | 0.002 |
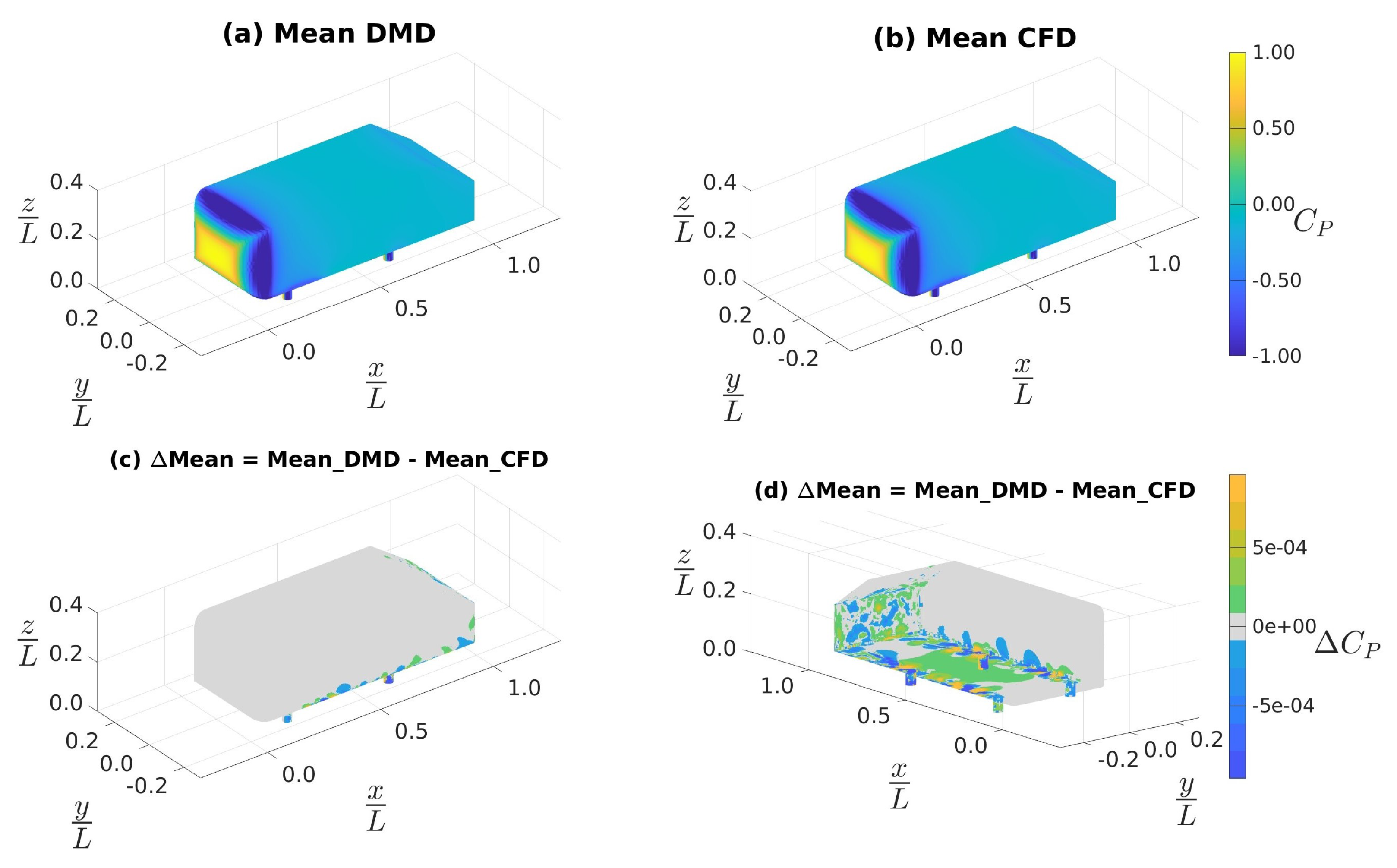
| Mean (CFD) | 0.220 | −0.059 | −0.001 | 0.022 | 0.000 | −0.001 |
| Mean (DMD) | 0.218 | −0.065 | −0.001 | 0.018 | 0.000 | −0.001 |
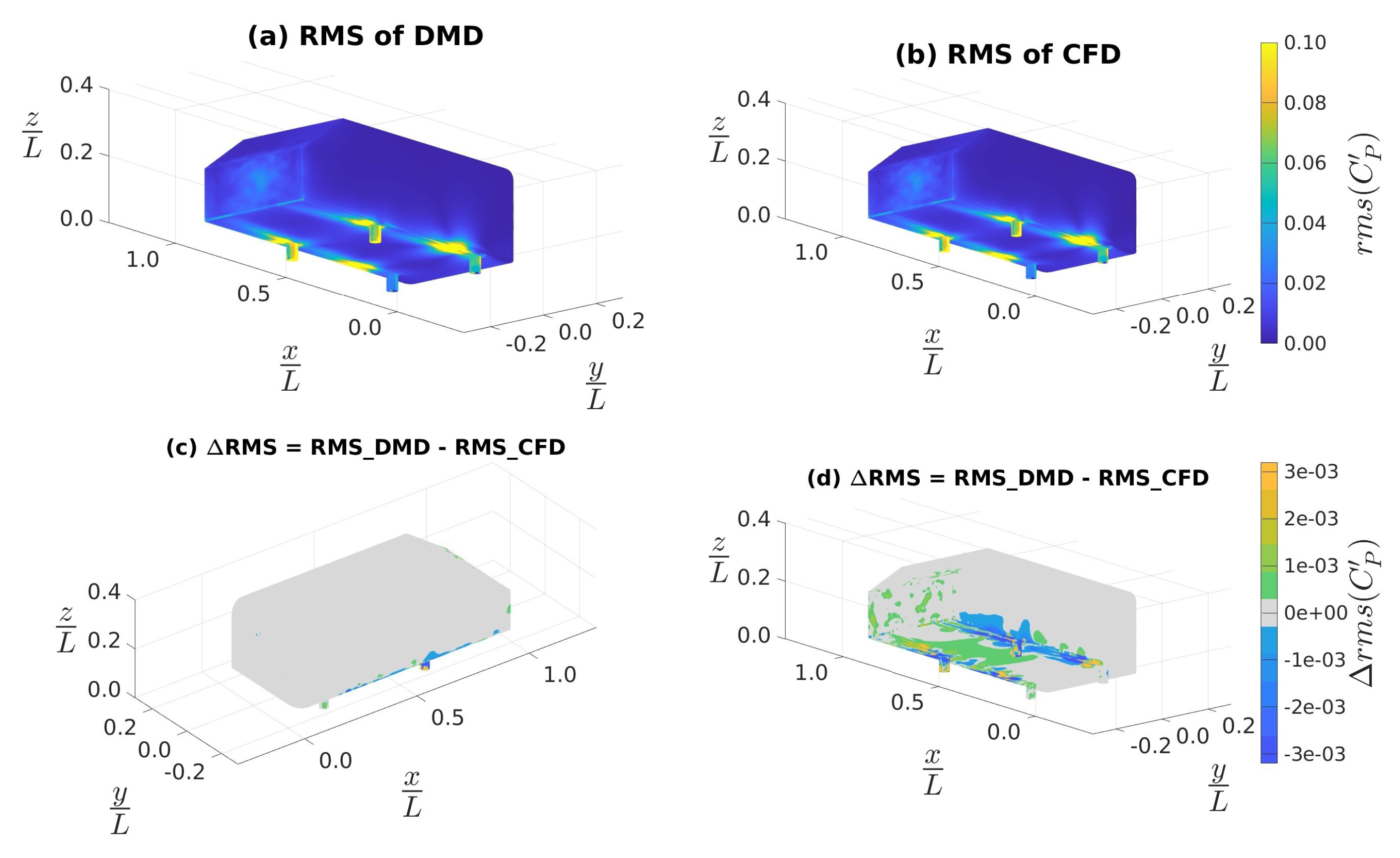
| RMS (CFD) | 0.002 | 0.011 | 0.005 | 0.003 | 0.001 | 0.001 |
| RMS (DMD) | 0.001 | 0.011 | 0.005 | 0.003 | 0.001 | 0.001 |
| Parameter | CFD | DMD |
|---|---|---|
| Processors | 144 | 1 |
| CPU time for the entire time-series | 100 h | <15 s |
| CPU time for a single time snapshot | 5 s | <0.01 s |
| Storage needed | 20 GB | <0.20 GB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misar, A.; Tison, N.A.; Korivi, V.M.; Uddin, M. Application of the DMD Approach to High-Reynolds-Number Flow over an Idealized Ground Vehicle. Vehicles 2023, 5, 656-681. https://doi.org/10.3390/vehicles5020036
Misar A, Tison NA, Korivi VM, Uddin M. Application of the DMD Approach to High-Reynolds-Number Flow over an Idealized Ground Vehicle. Vehicles. 2023; 5(2):656-681. https://doi.org/10.3390/vehicles5020036
Chicago/Turabian StyleMisar, Adit, Nathan A. Tison, Vamshi M. Korivi, and Mesbah Uddin. 2023. "Application of the DMD Approach to High-Reynolds-Number Flow over an Idealized Ground Vehicle" Vehicles 5, no. 2: 656-681. https://doi.org/10.3390/vehicles5020036
APA StyleMisar, A., Tison, N. A., Korivi, V. M., & Uddin, M. (2023). Application of the DMD Approach to High-Reynolds-Number Flow over an Idealized Ground Vehicle. Vehicles, 5(2), 656-681. https://doi.org/10.3390/vehicles5020036