
Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study


 ,
,
Abstract
1. Introduction
2. Materials and Methods
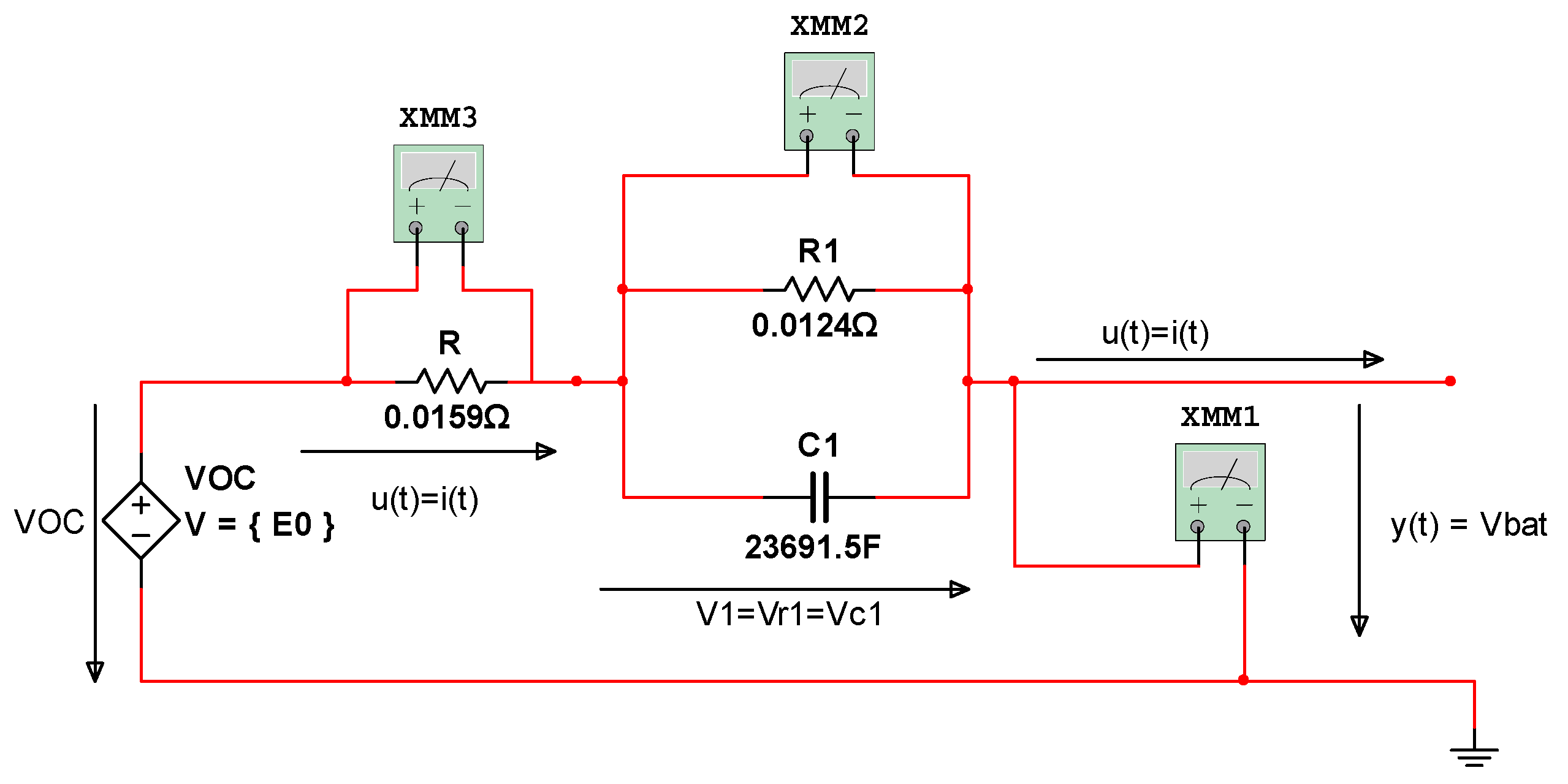
2.1. Li-Ion Battery—Equivalent Electric Circuit Schematics
2.2. Li-Ion Battery—Simulink Simscape Rint Model Simulation
2.3. Li-Ion ECM RC Continuous Model in State-Space Description
2.4. LIBM ECM RC Discrete Time State-Space Representation
2.5. LIBM ECM RC OCV(SOC) ANFIS Model
2.6. EKF SOC Estimator for the LIBM ECM RC Model in Discrete Time State-Space Representation and Model Validation
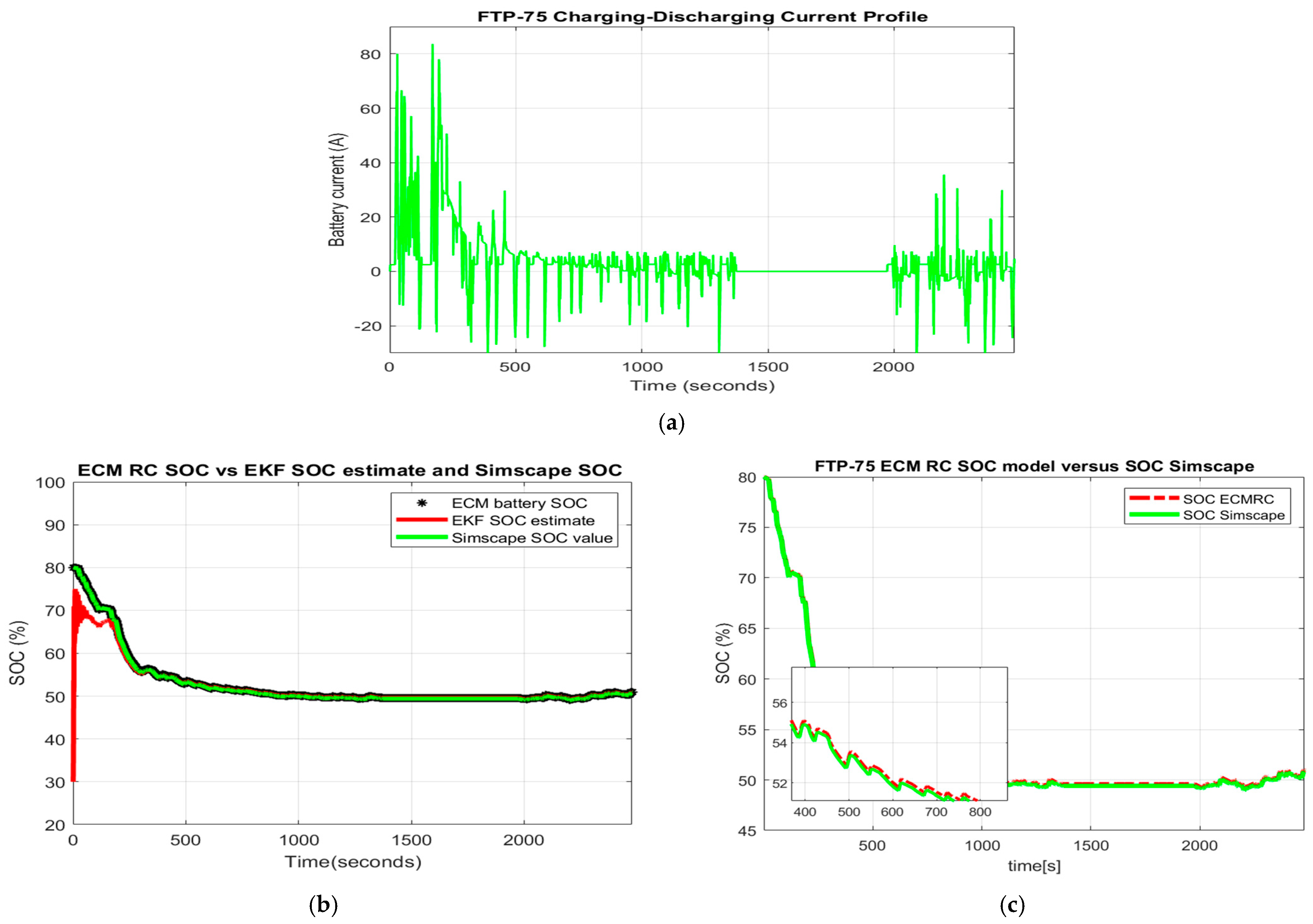
2.6.1. FTP-75 Driving Current Test Profile
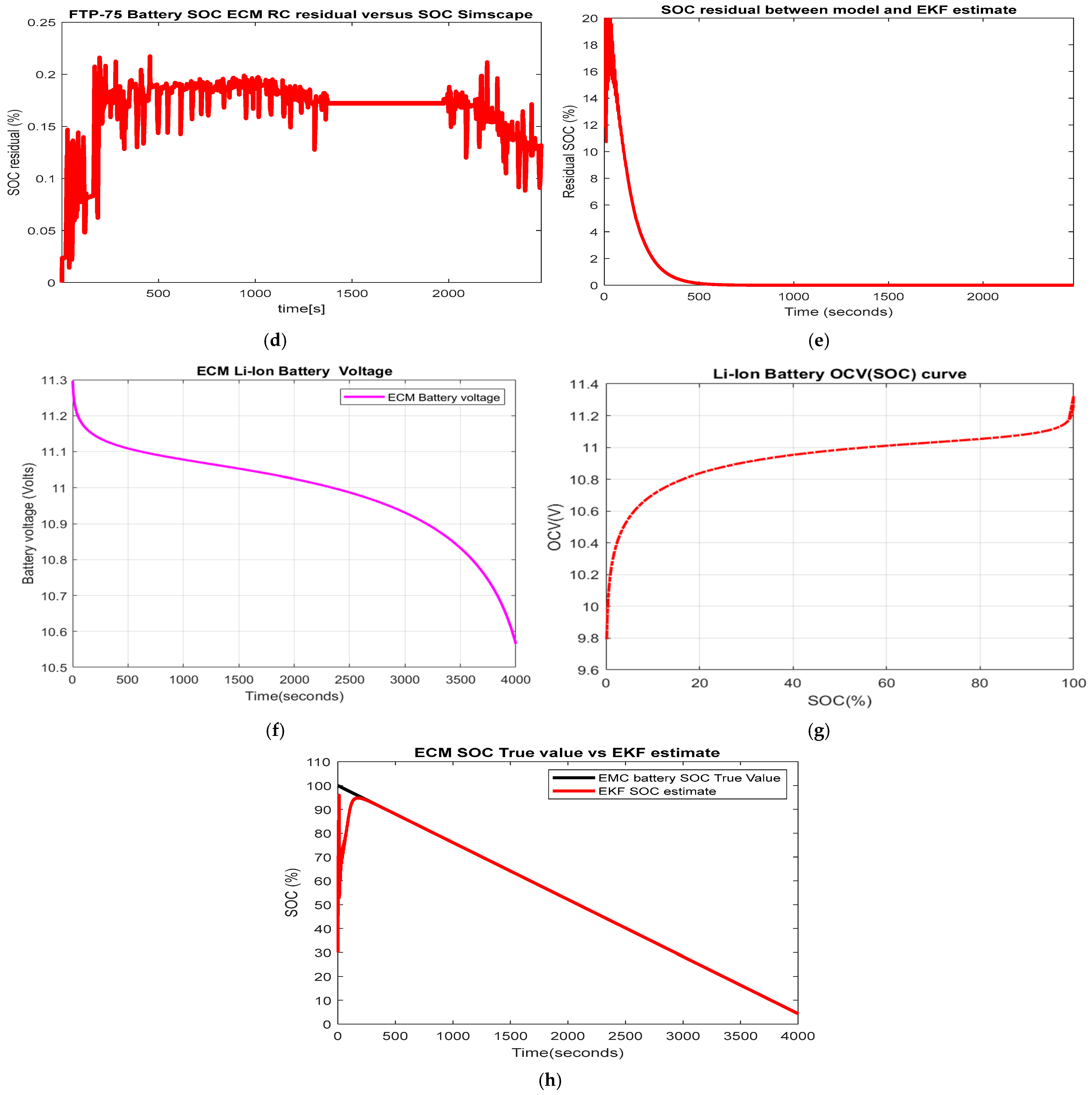
2.6.2. WLTC Class 3 Driving Current Test Profile
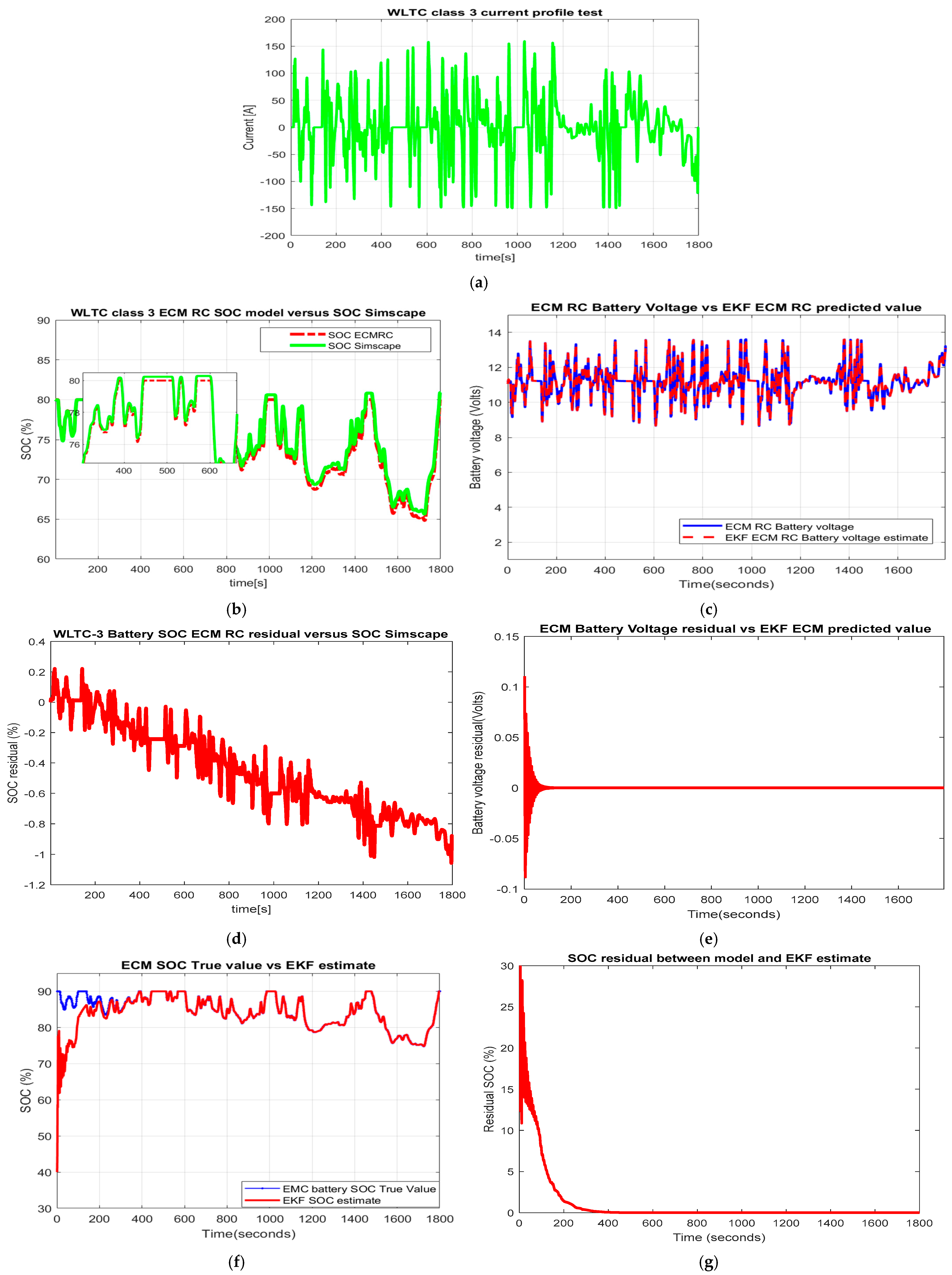
2.6.3. NEDC Driving Current Test Profile
2.6.4. EKF SOC Estimator and Terminal Voltage Prediction Using OCV ANFIS Mod–l–MATLAB Simulink Simulation Results for FTP-75 Driving Cycle Current Profile Test
2.7. NOE SOC Estimator for the LIBM ECM RC Model in Discrete Time State-Space Representation
3. Shallow SISO and MISO Neural Network Estimators for SOC and Terminal Voltage of Li-Ion Battery
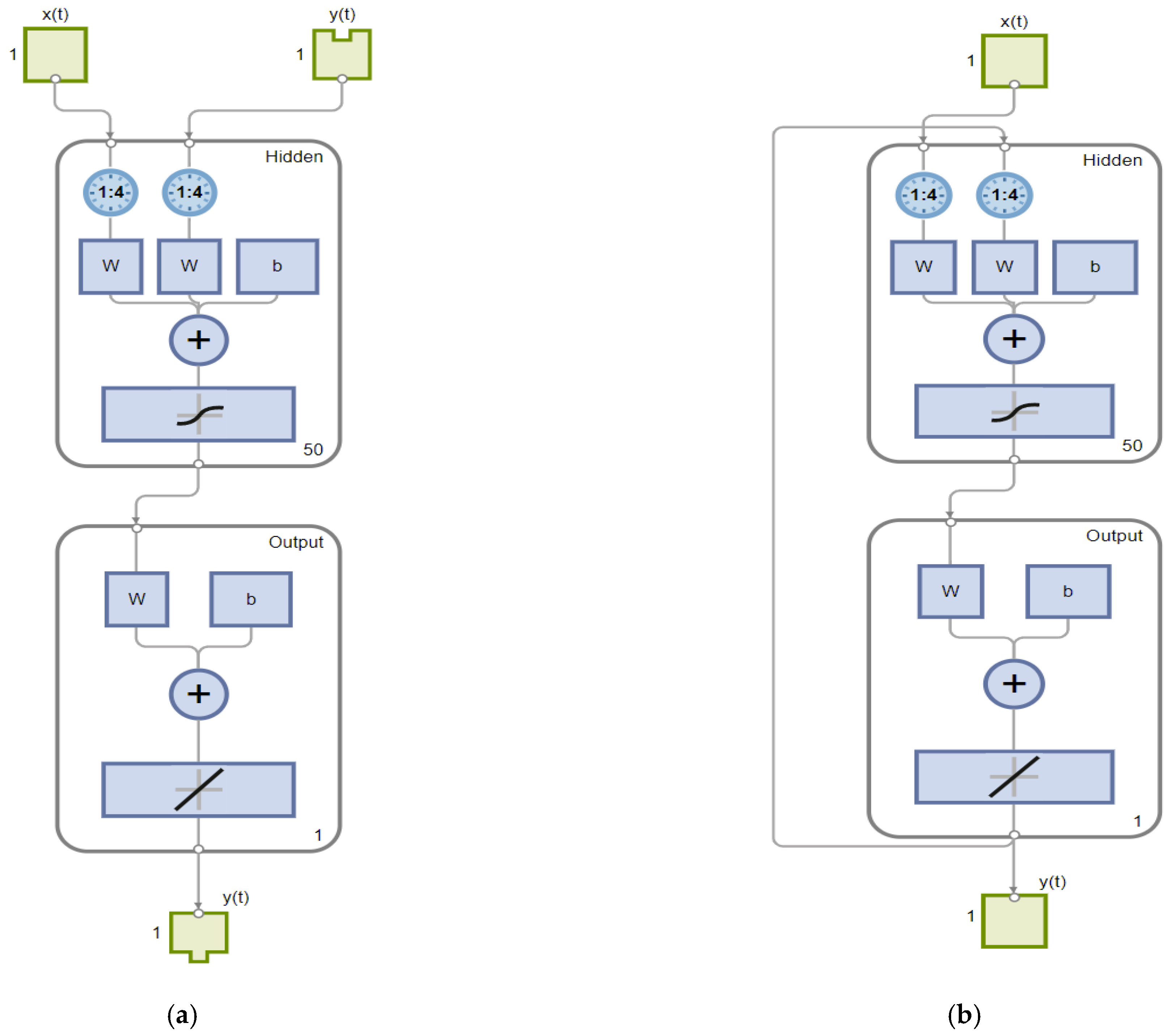
3.1. Time Series NARX Feedback SNN as LIB SOC Estimator—MATLAB Design and Implementation
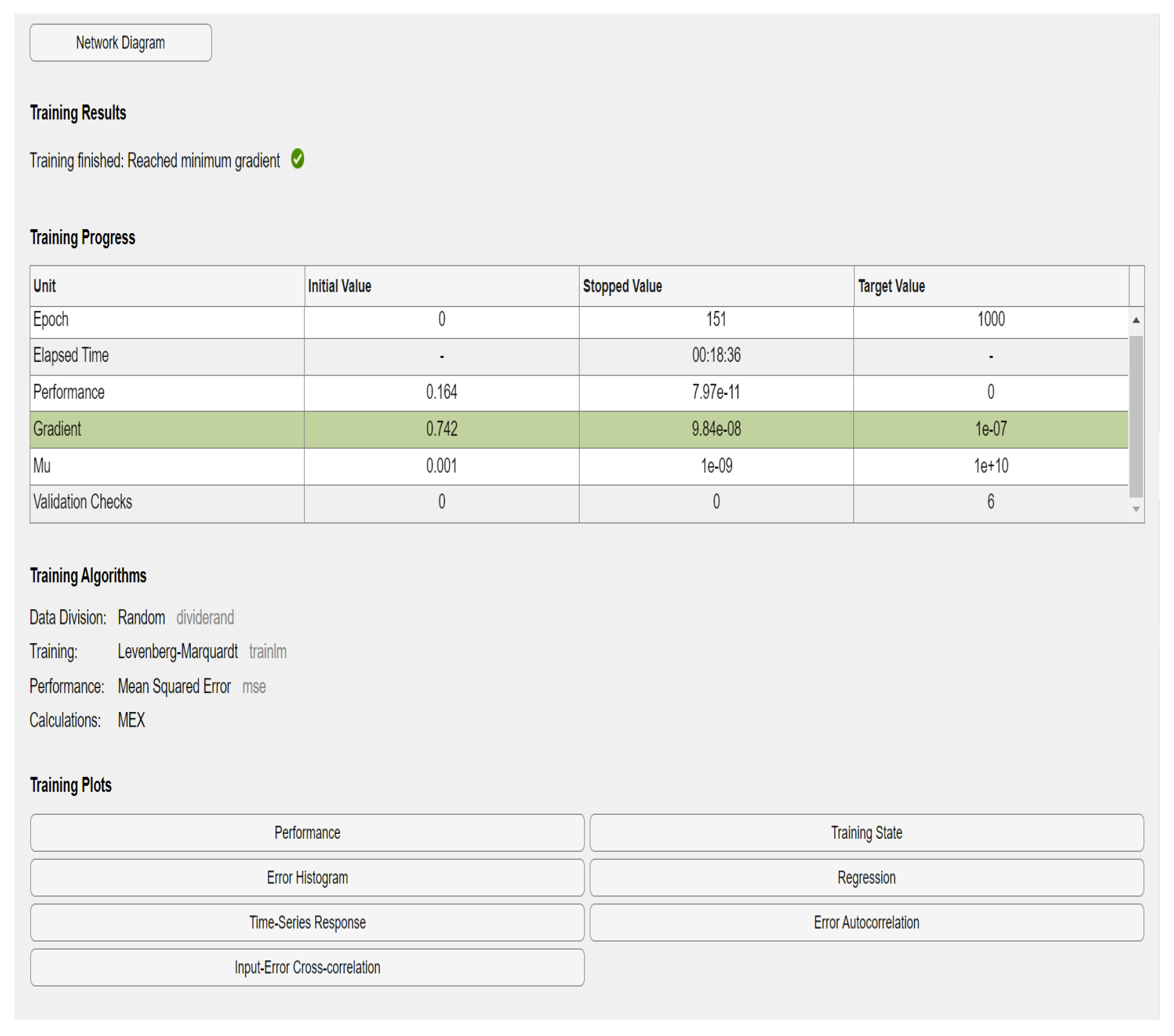
3.2. Shallow MISO Neural Network Terminal Voltage Estimator of LIB
- using the Simulink Neural Net Fitting app, which can be opened using the Simulink Toolbox “nftool” command, as a line in the MATLAB command window, or as a code line in script, as well as in a live script.
- 3.
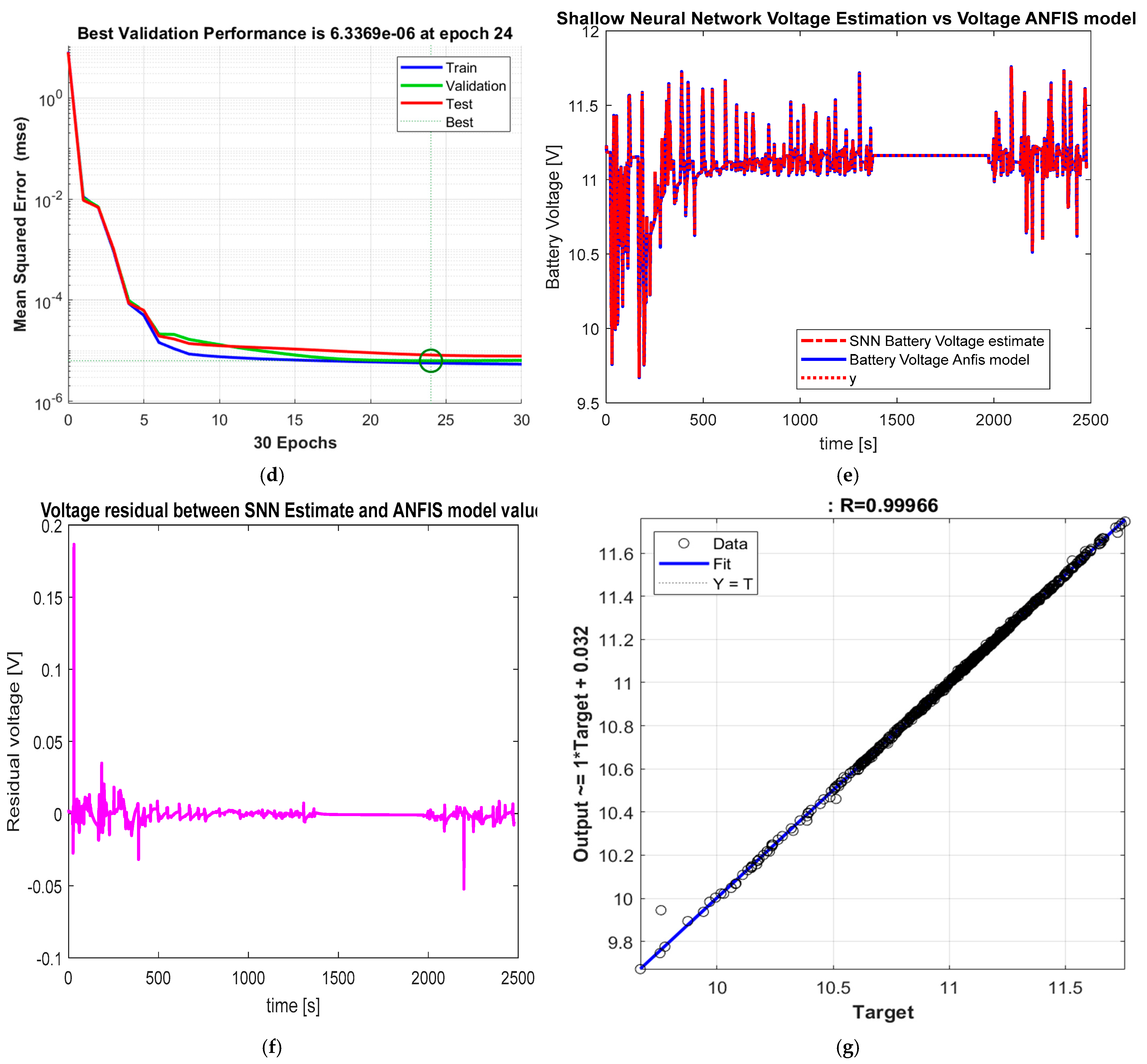
- plotperform(tr) with the simulation results shown in Figure 13d;
- 4.
- plottrainstate(tr), which is similar to the previous Figure 12d for NARX SNN;
- 5.
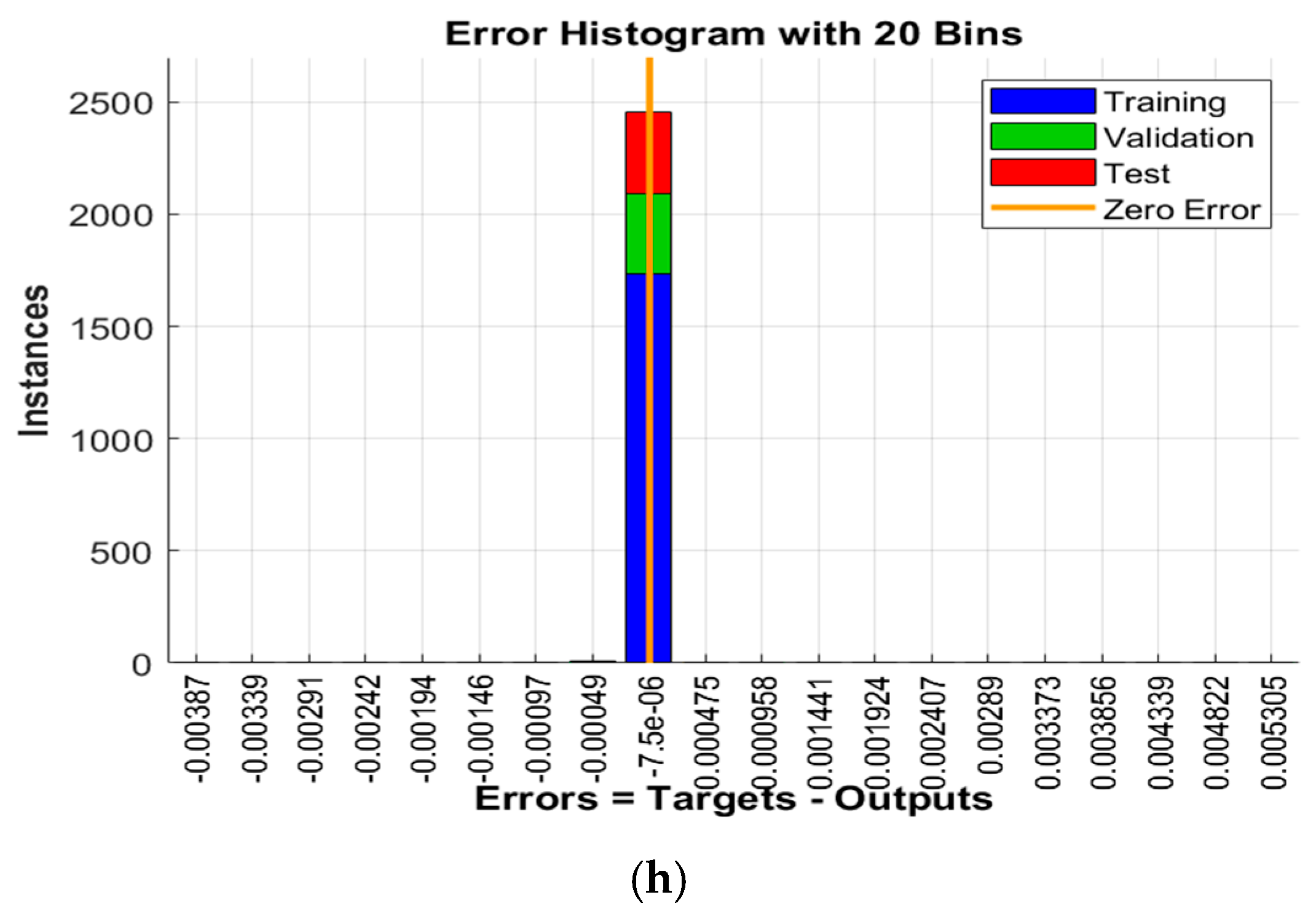
- ploterrhist (Error) with the simulation result shown in Figure 13c;
- 6.
- plot regression (Target_T, Y), as is depicted in Figure 13g;
- 7.
- All these graphs have the same meaning as for NARX SNN in open-loop configuration, represented previously in Figure 12.
- 8.
- Step 9. Analyze the results.
4. Discussion
5. Conclusions
- (a)
- Model selection—a pre-set Li-ion cobalt oxide (LiCO2) Rint Simscape generic model of 6 Ah and 11 V nominal voltage, ECM RC nonlinear model, simple, practical, accurate, easy to implement in real time in MATLAB environment, and validated using an experimental Simulink setup (Section 2.2).
- (b)
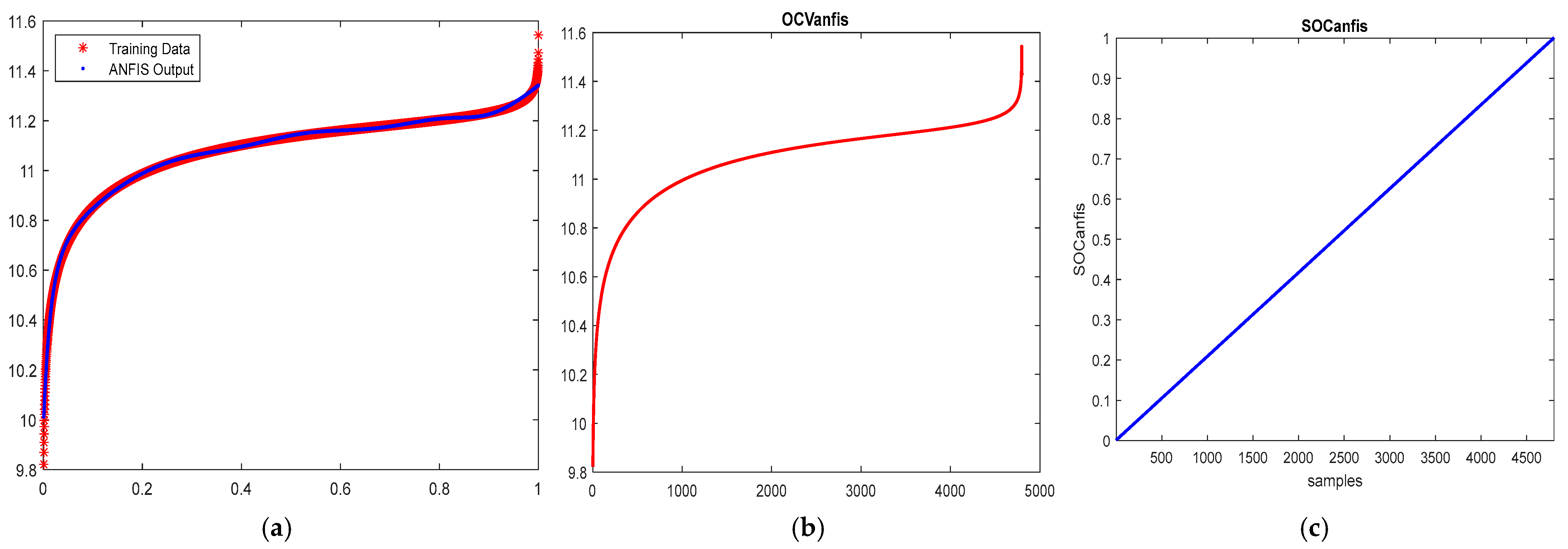
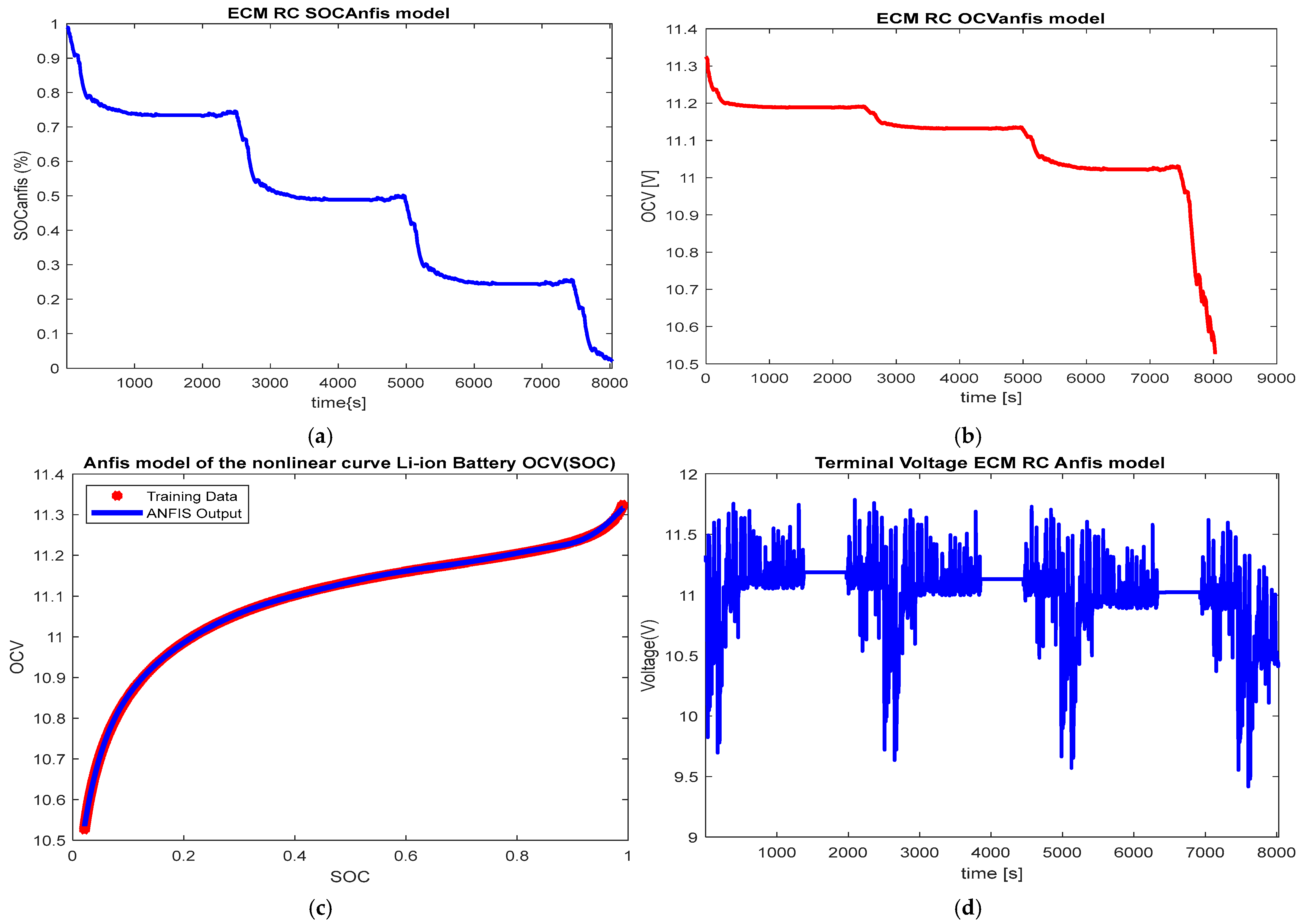
- Model hybridization including the most accurate ANFIS model of OCV(SOC) (Section 2.5, Appendix A.2, Figure 3 and Figure 4).
- (c)
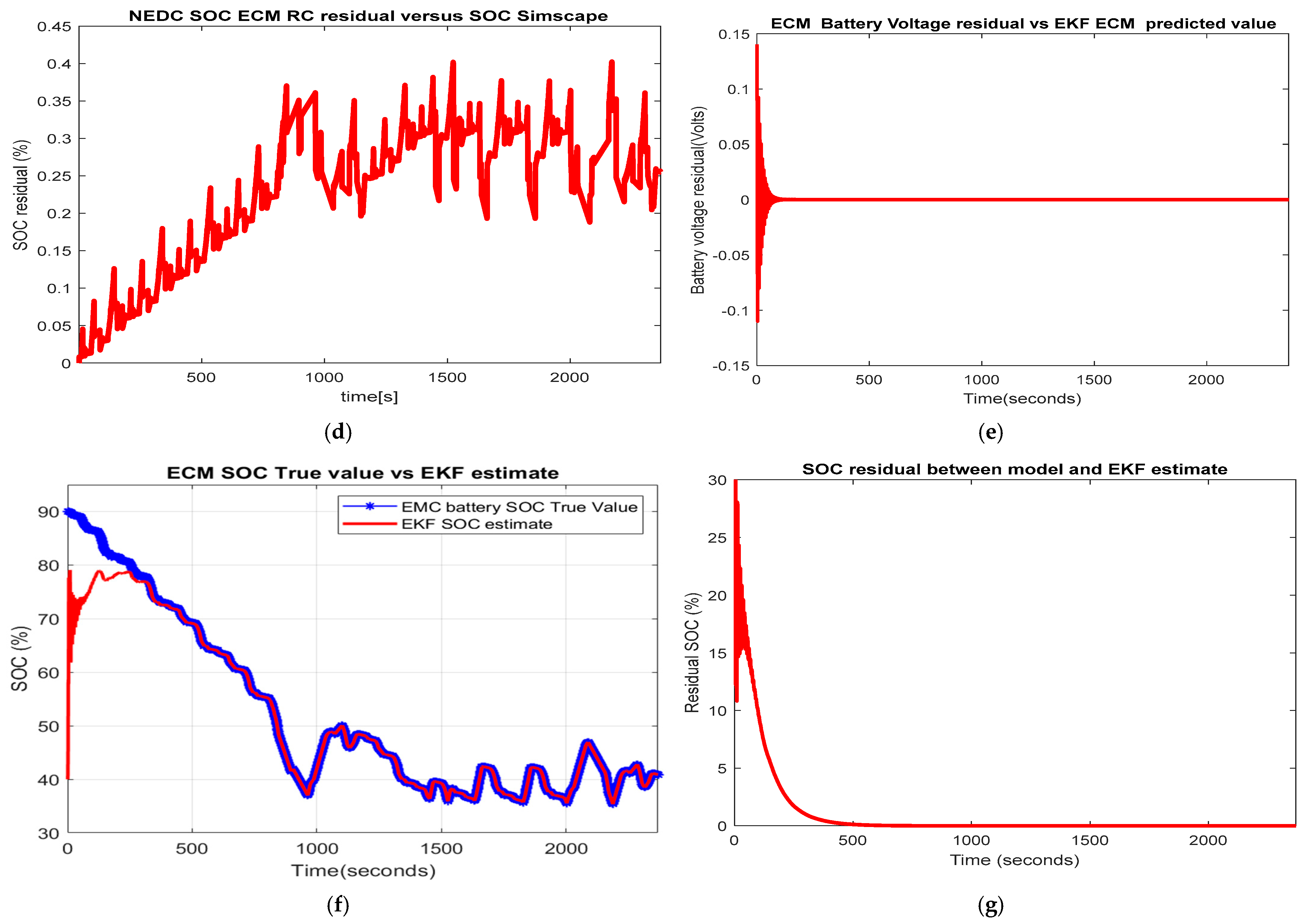
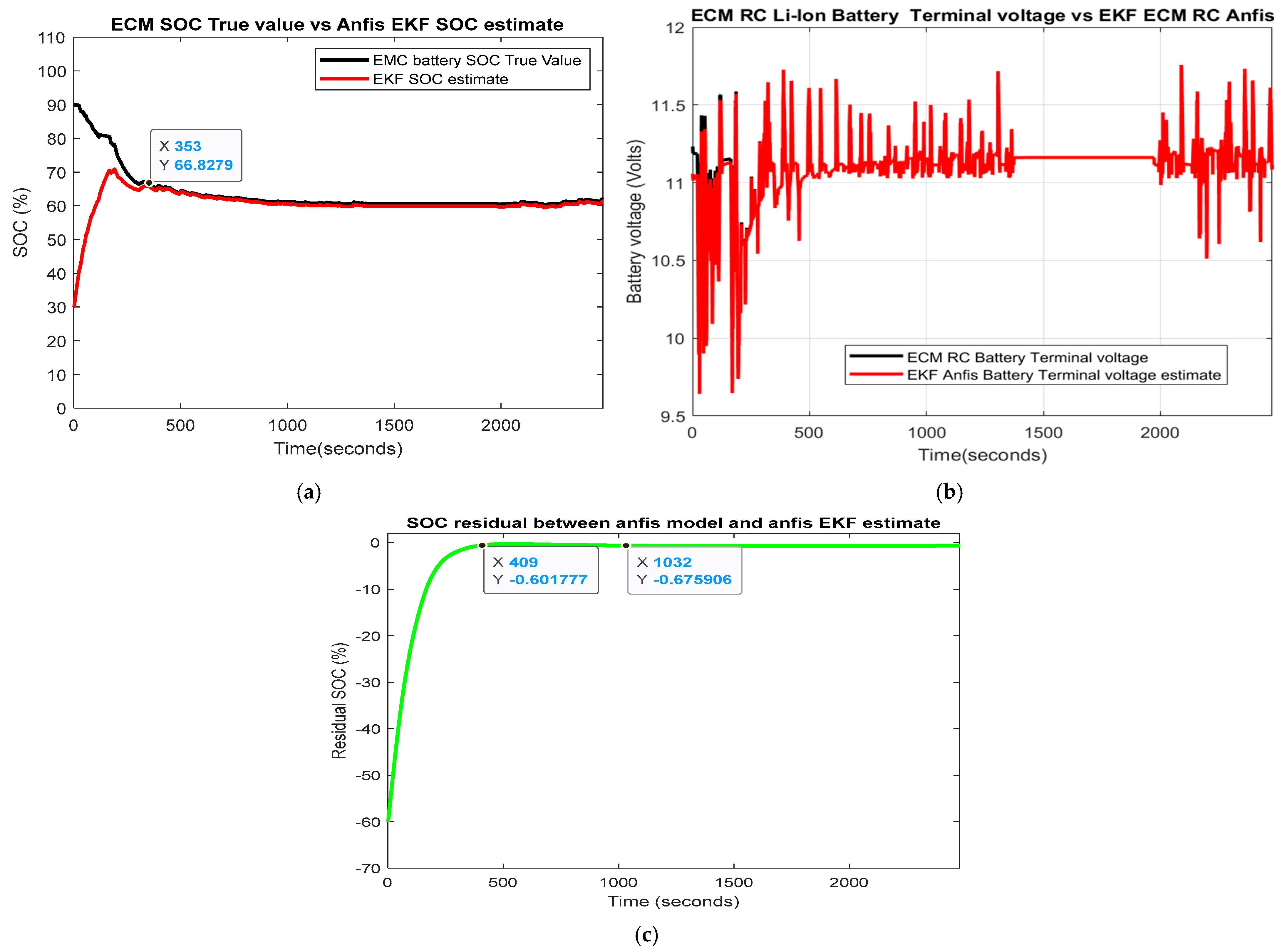
- Extended Kalman filter SOC estimator design and MATLAB implementation (Section 2.5, Appendix A.1) for original and ANFIS models (Section 2.6, Figure 5, Figure 6 and Figure 7).
- (d)
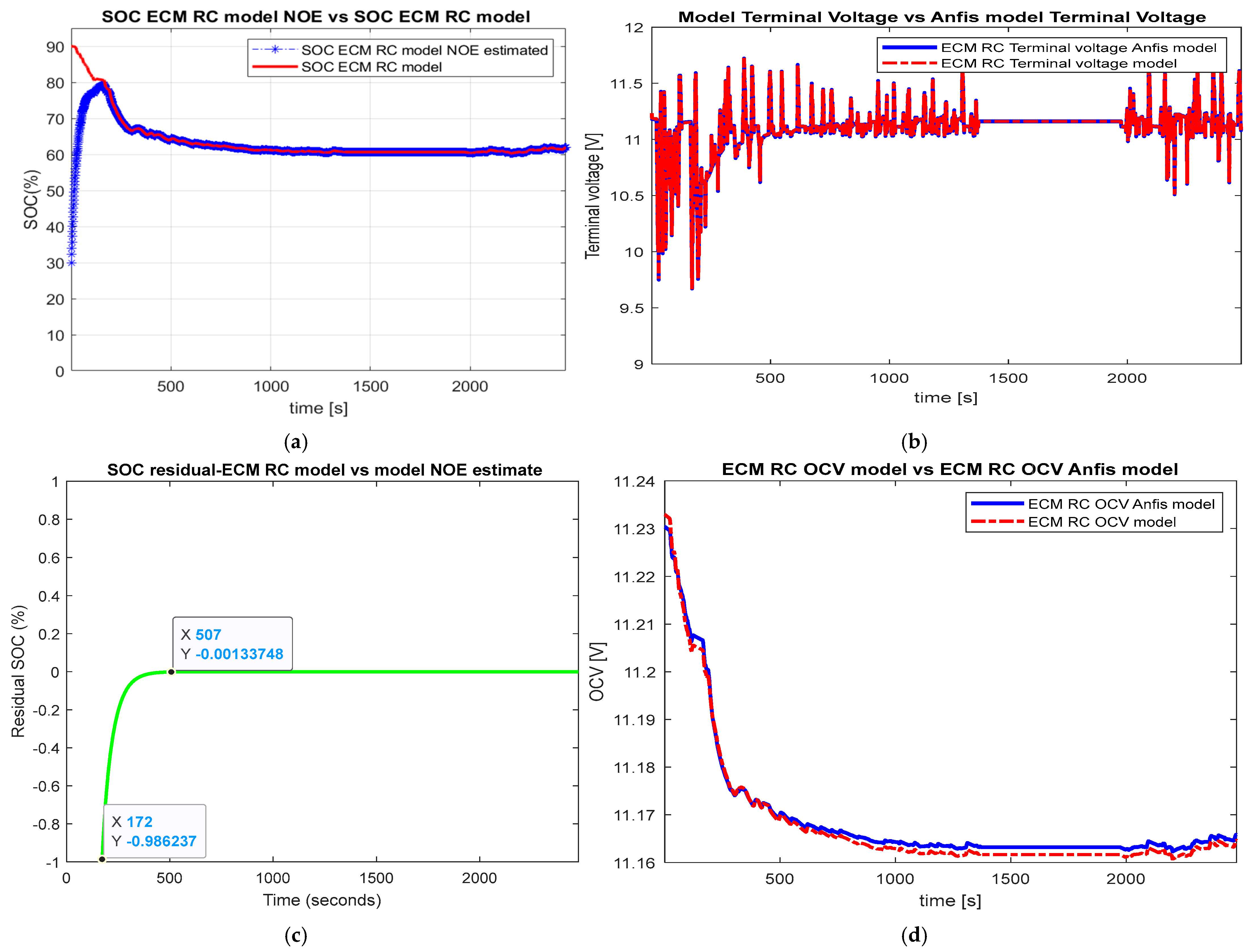
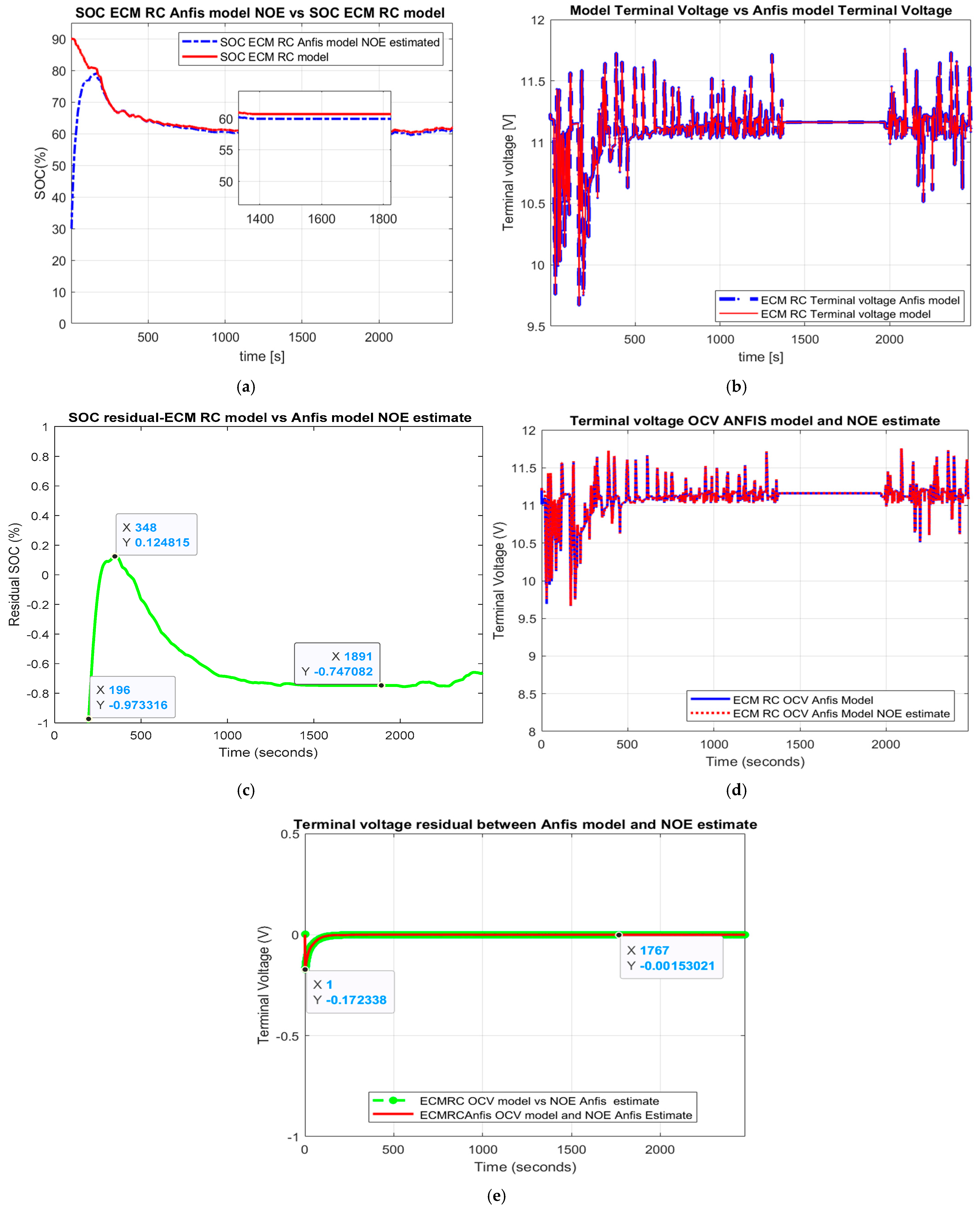
- Adaptive nonlinear observer SOC (Section 2.7, Appendix B) and MATLAB SOC simulations Figure 8 and Figure 9).
- (e)
- Performance analysis benchmark (SOC accuracy and robustness)—Table 1 for statistical errors RMSE, MSE, and MAE. The LIB ECM RC original and ANFIS models are both of high simplicity and SOC accuracy, easy to be implemented in real-time, and provide beneficial support in building two real-time EKF and ANOE SOC estimators. The robustness and accuracy of both SOC estimators was investigated for one of the most used driving cycle tests in the automotive industry FTP-75 and changes in the SOC initial value (“guess” value) from 0.9 to 0.3. Based on the statistical errors calculated for each driving cycle test in terms of RMSE, MSE, and MAE, it was possible to choose from both traditional competitors the most suitable SOC estimator. The result of the overall performance analysis indicated that the ANOE SOC estimator for the ANFIS model performed better than the EKF SOC estimator ANFIS model.
- (f)
- NARX SNN LIB SOC estimator design and MATLAB implementation (Section 3.1, Figure 10) and SNN LIB terminal voltage design and MATLAB implementation.
- (g)
- Intelligent shallow NARX SNN SOC estimator that performs better than the traditional winner ANOE SOC estimator for the ANFIS model.
- (h)
- The second SNN performed better than the ANOE for the LIB terminal voltage prediction ANFIS model, with the comparison based on the MSE performance reached during the training phase.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Li-ion Co | lithium-ion cobalt |
| EV | electric vehicle |
| HEV | hybrid electric vehicle |
| BMS | battery management system |
| LIB | lithium-ion battery |
| EMC RC | equivalent circuit model with resistor-capacitor cell |
| ADVISOR | advanced vehicle simulator |
| EPA | environmental protection agency |
| UDDS | urban dynamometer driving schedule. |
| FTP-75 | federal test procedure at 75 F |
| NEDC | New European Driving Cycle |
| WLTP | Worldwide Harmonized Light Vehicle Test Procedure |
| WLTC | Worldwide Harmonized Light Vehicle Test Cycles |
| ANOE | adaptive nonlinear observer estimator |
| RMSE | root mean squared error |
| MSE | mean squared error |
| MAE | mean absolute error |
| OCV | open-circuit voltage |
| SOC | state of charge SOE state of energy |
| NREL | National Renewable Energy Laboratory |
| EKF | extended Kalman filter |
| AI | artificial intelligence |
| SNN | shallow neural network |
| NARX | nonlinear autoregressive with exogenous input time-series |
| MIMO | multi-input, multi-output systems |
| MISO | multi-input, single-output systems |
Appendix A
Appendix A.1. Extended Kalman Filter (EKF) Algorithm—Summary Steps [11,12,13,14,15]
- Initialization of the states x1 (SOCini = 0.3) and x2 (Voltage polarization, x20 = 0), covariance matrix of the states Px, and tuning values for covariance matrices for the process noise Qw and measurement noise Rv.For k = 1, 2, 3, …, 2478 DO:
- Prediction step
- Prediction equations (forecast):
- Prediction state covariance:
- Correction step (measurement update)
- Kalman filter gain computation:
- Correction estimates equation with a new measurement:
- Update the state covariance matrix:
- Update the output estimate:
Appendix A.2. Adaptive Neural Fuzzy Inference System (ANFIS) Model of LIB OCV(SOC) [11,18]
Appendix B
- Initialization of the states x1 (SOCini = 0.3) and x2 (voltage polarization, x20 = 0), observer filter gain L0For k = 1, 2, 3, …, 2478 DO:
- NOE LIB dynamics equations2.1 Observer estimator gain adaptive law.
- NOE dynamics equations
References
- Moshirvaziri, A. Lithium-Ion Battery Modelling for Electric Vehicles and Regenerative Cell Testing Platform. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2013. [Google Scholar]
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric Vehicle Battery Technologies—Chapter 2. In Electric Vehicle Integration into Modern Power Networks, 1st ed.; Garcia-Valle, R., Peças Lopes, J., Eds.; Springer: New York, NY, USA, 2013; pp. 15–26. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Xu, J.; Cao, B. Battery Management System for Electric Drive Vehicle-Modeling State Estimation and Balancing—Chapter 4. In New Applications of Electric Drives, 1st ed.; Chomat, M., Ed.; INTECH: Rijeka, Croatia, 2015; pp. 87–113. [Google Scholar] [CrossRef]
- Xia, B.; Zheng, W.; Zhang, R.; Lao, Z.; Sun, Z. A Novel Observer for Lithium-Ion Battery State of Charge Estimation in Electric Vehicles Based on a Second-Order Equivalent Circuit Model. Energies 2017, 10, 1150. [Google Scholar] [CrossRef]
- Cui, X.; Shen, W.; Zhang, Y.; Hu, C. A Novel Active Online State of Charge Based Balancing Approach for Lithium-Ion Battery Packs during Fast Charging Process in Electric Vehicles. Energies 2017, 10, 1766. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Shen, W. Lithium-Ion Battery Pack State of Charge and State of Energy Estimation Algorithms Using a Hardware-in-the-Loop Validation. IEEE Trans. Power Electron. 2016, 32, 4421–4431. [Google Scholar] [CrossRef]
- Zhang, R.; Xia, B.; Li, B.; Cao, L.; Lai, Y.; Zheng, W.; Wang, H.; Wang, W. State of the Art of Lithium-Ion Battery SOC Estimation for Electrical Vehicles. Energies 2018, 11, 1820. [Google Scholar] [CrossRef]
- Tudoroiu, R.-E.; Zaheeruddin, M.; Radu, S.-M.; Tudoroiu, N. Real-Time Implementation of an Extended Kalman Filter and a PI Observer for State Estimation of Rechargeable Li-Ion Batteries in Hybrid Electric Vehicle Applications—A Case Study. Batteries 2018, 4, 19. [Google Scholar] [CrossRef]
- Tudoroiu, R.-E.; Zaheeruddin, M.; Radu, S.-M.; Tudoroiu, N. Estimation Techniques for State of Charge in Battery Management Systems on Board of Hybrid Electric Vehicles Implemented in a Real-Time MATLAB/SIMULINK Environment. In New Trends in Electrical Vehicle Powertrains; IntechOpen: London, UK, 2019; Chapter 4. [Google Scholar] [CrossRef]
- Tudoroiu, R.-E.; Zaheeruddin, M.; Tudoroiu, N.; Radu, S.-M. Investigations of using an Intelligent ANFIS Modelling Approach for a Li-ion Battery in MATLAB–mplementation-Case Study. In Smart Mobility-Recent Advances, New Perspectives and Applications; IntechOpen: London, UK, 2022. [Google Scholar] [CrossRef]
- Farag, M. Lithium-Ion Batteries, Modeling and State of Charge Estimation. Master’s Thesis, University of Hamilton, ON, Canada, 2013. [Google Scholar]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Tudoroiu, N.; Radu, S.M.; Tudoroiu, E.-R. Improving Nonlinear State Estimation Techniques by Hybrid Structures, 1st ed.; LAMBERT Academic Publishing: Saarbrucken, Germany, 2017; 56p, ISBN 978-3-330-04418-0. [Google Scholar]
- Simon, J.J.; Uhlmann, J.K. A New Extension of the Kalman Filter to Nonlinear Systems. In Process of AeroSense, Proceedings of the 11th International Symposium on Aerospace/Defense Sensing, Simulation and Controls, Orlando, FL, USA, 20–25 April 1997. [Google Scholar]
- Konsoulas Ilias, S. Adaptive Neuro-Fuzzy Inference Systems (ANFIS) Library for Simulink. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/36098-adaptive-neuro-fuzzy-inference-systems-anfis-library-for-simulink (accessed on 19 January 2022).
- MathWorks MATLAB Version R2021b Online Documentation. Neuro-Adaptive Learning and ANFIS. Available online: https://www.mathworks.com/help/fuzzy/neuro-adaptive-learning-and-anfis.html (accessed on 27 March 2023).
- Vidal, C.; Kollmeyer, P.; Naguib, M.; Malysz, P.; Gross, O.; Emadi, A. Robust xEV Battery State-of-Charge Estimator Design Using a Feedforward Deep Neural Network. SAE Int. J. Adv. Curr. Prac. Mobil. 2020, 2, 2872–2880. [Google Scholar] [CrossRef]
- MathWorks MATLAB Version R2021b Online Documentation. Neuro-Fuzzy Designer. Available online: https://www.mathworks.com/help/fuzzy/neurofuzzydesigner-app.html (accessed on 27 March 2023).
- MathWorks MATLAB Version R2023a Online Documentation. Design Time Series NARX Feedback Neural Networks. Available online: https://www.mathworks.com/help/deeplearning/ug/design-time-series-narx-feedback-neural-networks.html (accessed on 28 March 2023).
- MathWorks MATLAB Version R2023a Online Documentation. Available online: https://www.mathworks.com/help/ident/ref/arx.html (accessed on 28 March 2023).
- Ezzeldin, R.; Hatata, A. Application of NARX neural network model for discharge prediction through lateral orifices. Alex. Eng. J. 2018, 57, 2991–2998. [Google Scholar] [CrossRef]
- MathWorks MATLAB Version R2023a Online Documentation. Multistep Neural Network Prediction. Available online: https://www.mathworks.com/help/deeplearning/ug/multistep-neural-network-prediction.html (accessed on 29 March 2023).
- MathWorks MATLAB Version R2023a Online Documentation. Fit data with a Shallow Neural Network. Available online: https://www.mathworks.com/help/deeplearning/gs/fit-data-with-a-neural-network.html (accessed on 29 March 2023).
- Zhang, D.; Zhong, C.; Xu, P.; Tian, Y. Deep Learning in the State of Charge Estimation for Li-Ion Batteries of Electric Vehicles: A Review. Machines 2022, 10, 912. [Google Scholar] [CrossRef]
- Kollmeyer, P.; Vidal, C.; Naguib, M.; Skells, M. LG 18650HG2 Li-Ion Battery Data and Example Deep Neural Network XEV SOC Estimator Script. Mendeley Data 2020, 3, 2020. [Google Scholar] [CrossRef]
- MathWorks Documentation. Battery State of Charge Estimation in Simulink Using Deep Learning Network. Available online: https://www.mathworks.com/help/deeplearning/ug/battery-state-of-charge-estimation-simulink-deep-learning.html (accessed on 23 April 2023).
- Chandran, V.; Patil, C.K.; Karthick, A.; Ganeshaperumal, D.; Rahim, R.; Ghosh, A. State of Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Machine Learning Algorithms. World Electr. Veh. J. 2021, 12, 38. [Google Scholar] [CrossRef]
- Johnson, V. Battery performance models in ADVISOR. J. Power Sources 2001, 110, 321–329. [Google Scholar] [CrossRef]
- Wipke, K.B.; Cuddy, R.M. Using an Advanced Vehicle Simulator (ADVISOR) to Guide Hybrid Vehicle Propulsion System Development; National Renewable Energy Laboratory: Golden, CO, USA, August 1996; Research Gate Net. Available online: https://www.nrel.gov/docs/legosti/fy96/21615.pdf (accessed on 1 March 2020).
- DieselNet-Emission Test Cycles. Worldwide Harmonized Light Vehicles Test Cycles (WLTC). Available online: https://dieselnet.com/standards/cycles/wltp.php (accessed on 22 April 2023).
- WLTC_class_3. Available online: https://unece.org/DAM/trans/doc/2012/wp29grpe/WLTP-DHC-12-07e.xls (accessed on 22 April 2023).
- Micari, S.; Foti, S.; Testa, A.; De Caro, S.; Sergi, F.; Andaloro, L.; Aloisio, D.; Leonardi, S.G.; Napoli, G. Effect of WLTP CLASS 3B Driving Cycle on Lithium-Ion Battery for Electric Vehicles. Energies 2022, 15, 6703. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimates vs. Observations | RMSE | MSE | MAE |
|---|---|---|---|
| SOC EKF ECM RC model vs. SOC ECM RC model | 0.0867 | 0.0075 | 0.0284 |
| Terminal voltage EKF ECM model vs. terminal voltage ECM RC model | 0.0071 | 5.0707 × 10−5 | 7.5499 × 10−4 |
| Terminal voltage EKF ECM model vs. terminal voltage ECM RC ANFIS model | 0.0072 | 5.242 × 10−5 | 0.0019 |
| Terminal voltage NOE ECM ANFIS model vs. terminal voltage ECM RC ANFIS model | 0.0137 | 1.885 × 10−4 | 0.0035 |
| SOC NOE ECM RC ANFIS model vs. SOC ECM RC ANFIS model | 0.0562 | 0.0031 | 0.0157 |
| SOC ADVISOR Rint model vs. SOC ECM RC model | 0.0652 | 0.004 | 0.0330 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.-E.; Radu, M.S.; Chammas, H. Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study. Vehicles 2023, 5, 535-564. https://doi.org/10.3390/vehicles5020030
Tudoroiu N, Zaheeruddin M, Tudoroiu R-E, Radu MS, Chammas H. Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study. Vehicles. 2023; 5(2):535-564. https://doi.org/10.3390/vehicles5020030
Chicago/Turabian StyleTudoroiu, Nicolae, Mohammed Zaheeruddin, Roxana-Elena Tudoroiu, Mihai Sorin Radu, and Hana Chammas. 2023. "Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study" Vehicles 5, no. 2: 535-564. https://doi.org/10.3390/vehicles5020030
APA StyleTudoroiu, N., Zaheeruddin, M., Tudoroiu, R.-E., Radu, M. S., & Chammas, H. (2023). Intelligent Deep Learning Estimators of a Lithium-Ion Battery State of Charge Design and MATLAB Implementation—A Case Study. Vehicles, 5(2), 535-564. https://doi.org/10.3390/vehicles5020030