
Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities

 , , , and
, , , and
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Topic |
|---|---|---|
| Yang et al. [17] | 2009 |
|
| Parsons et al. [18] | 2014 |
|
| Aydin et al. [19] | 2014 |
|
| Wang et al. [16] | 2017 |
|
| Kwon et al. [20] | 2010 |
|
| Wang et al. [21] | 2009 |
|
| Zhang et al. [22] | 2019 |
|
| Moreda et al. [23] | 2016 |
|
2. Electric Powertrain Architectures in Different Off-Road Equipment Categories
2.1. General Off-Road Equipment
2.2. Construction Equipment


| Reference | Year | EV Type | Components of Interest | Control Algorithm | Implementation Level | Equipment Type |
|---|---|---|---|---|---|---|
| Kwon et al. [20] | 2010 | HEV |
| Balancing power demand between a supercapacitor and the engine at each instance. | Simulation | Excavator |
| Yao et al. [50] | 2013 | HEV |
| Combination of proportional (P) controller and mixed sensitivity controller. | Simulation and Hardware implementation | Excavator |
| Xiao et al. [54] | 2008 | Parallel HEV |
| Dynamic work point. | Simulation | Excavator |
| Lin et al. [51] | 2008 | Parallel HEV, Series HEV |
| Dynamic multi work point controller comprising of direct torque control, and closed loop proportional-integral (PI) control. | Simulation | Excavator |
| Lee et al. [52] | 2013 | Parallel, series, and dual mode power split PHEV |
| Electric motor drives hydraulic pump, powered by battery; battery is charged by the generator run by ICE. | Simulation | Excavator |
| Yoo et al. [53] | 2009 | Parallel, series, and compound HEV |
| Electric swing system, electric power assistance of ICE, regenerated energy stored in SC. | Simulation and hardware implementation | Excavator |
| Ge et al. [55] | 2017 | HEV |
| Variable speed electric motor drives a variable displacement pump to meet the dynamic energy demand. | Simulation and hardware implementation | Excavator |
| Wang et al. [65] | 2013 | HEV |
| Energy regeneration from swing system and boom. | Simulation | Excavator |
| Mazumdar [59] | 2013 | BEV |
| Driven by overhead power supply. Regenerated energy stored in ESS to use in short driving distances. | Simulation | Off-highway truck |
| Esfahanian et al. [57] | 2013 | HEV |
| Road grade data used for dynamic energy management. | - | Off-highway truck |
| Reference | Manufacturer | Model | EV Type | Components of Interest | Control Strategy | Equipment Type | Implementation Level |
|---|---|---|---|---|---|---|---|
| [36,66] | John Deere | 644K Hybrid Wheel Loader | HEV |
| No reverse gear as electric motor can perform this shift in direction, brake resistor consumes and dissipates excess energy generated during regenerative braking. | Skid steer loader/rubber-tired loader | Hardware implementation |
| [37,38] | John Deere | 318E 320E 326E 328E 332E | HEV |
| - | Skid steer loader/rubber-tired loader | Hardware implementation |
| [39] | Tobroco-Giant | GIANT E-skid steer | BEV |
| - | Skid steer loader/rubber-tired loader | Hardware implementation |
| [44] | Caterpillar | R1300G LHD | BEV |
| Electric motor used to run mechanical drivetrain through electric motor. | Rubber-tired loader | Hardware implementation |
| [40,41] | Caterpillar | 988K XE | HEV |
| - | Rubber-tired loader | Hardware implementation |
| [16] | Kobelco (modified) | 70SR | HEV |
| Energy supplied to the electrical load from the battery when needed, and absorbed during braking. | Excavator | - |
| [16,67] | Kobelco | SK80H | HEV |
| Battery charging and discharging limit set according to concurrent state-of-charge to ensure maximum efficiency and lifetime. | Excavator | Simulation |
| [16] | Caterpillar | - | Parallel HEV |
| Operating mode and torque set according to load variation and SOC. | Excavator | - |
| [16] | Komatsu | - | HEV |
| Separate use of hydraulic motor and generator. | Excavator | - |
| [16,67] | Hitachi | - | Parallel HEV |
| Control system comprised of master and slave controllers where the slave is used to monitor and govern the SC charge-discharge. | Excavator | - |
| [16] | Doosan | - | HEV |
| - | Excavator | - |
| [16,48,49] | Kobelco | - | Series HEV |
| ESS assists during heavy load and stores surplus energy under light loads. Engine works in high efficiency region all the time, even stops when ESS energy is sufficient to drive loads. | Excavator | - |
| [16] | Sumitomo | - | HEV |
| SC SoC set to a higher value to drive load at higher voltage with better efficiency. | Excavator | - |
| [56] | Komatsu | 830E (modified) | Series HEV |
| Battery used to recover braking energy to be deployed for power boost or enhanced engine efficiency. | Off-highway truck | Simulation and hardware implementation |
| [58] | Komatsu | 830E-1AC | Series HEV |
| - | Off-highway truck | Commercially available |
| [68] | Komatsu | 930E-4 | Diesel-electric with dynamic braking |
| - | Off-highway truck | Commercially available |
| [69] | Caterpillar | 795F AC Mining Truck | Diesel-electric with dynamic braking |
| - | Off-highway truck | Commercially available |
| [60] | Komatsu | 605-7 (modified) | BEV |
| The battery powers the motor and stores regenerative energy. | Off-highway truck | Hardware implementation |
2.3. Agricultural Equipment

3. Energy Recovery
4. Promises and Concerns of Off-Road Equipment Electrification
4.1. Advantages
4.2. Limitations and Solutions
4.3. Current Barriers
5. Proposals for Off-Road Equipment Electrification
6. Outcomes and Future Works
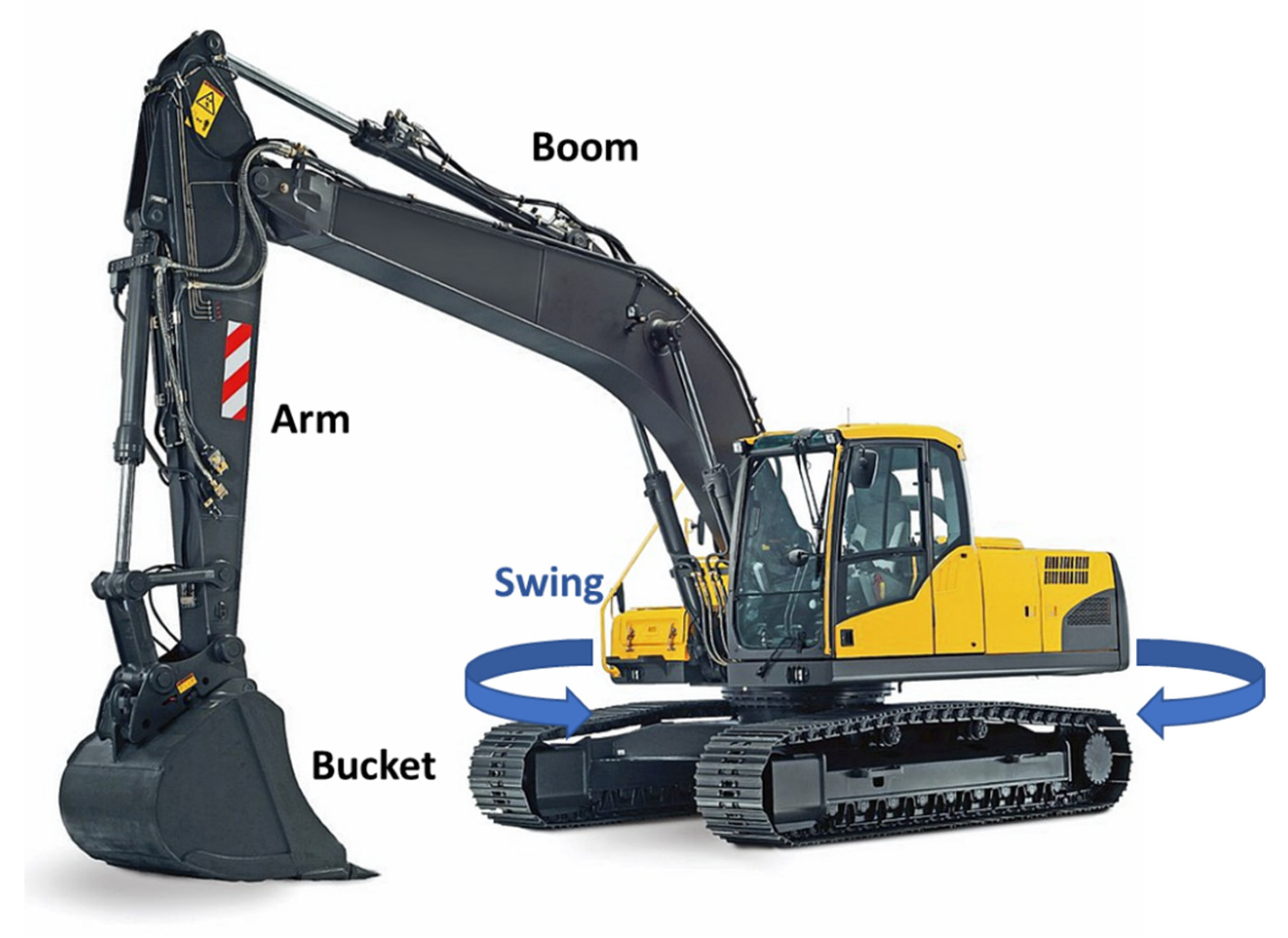
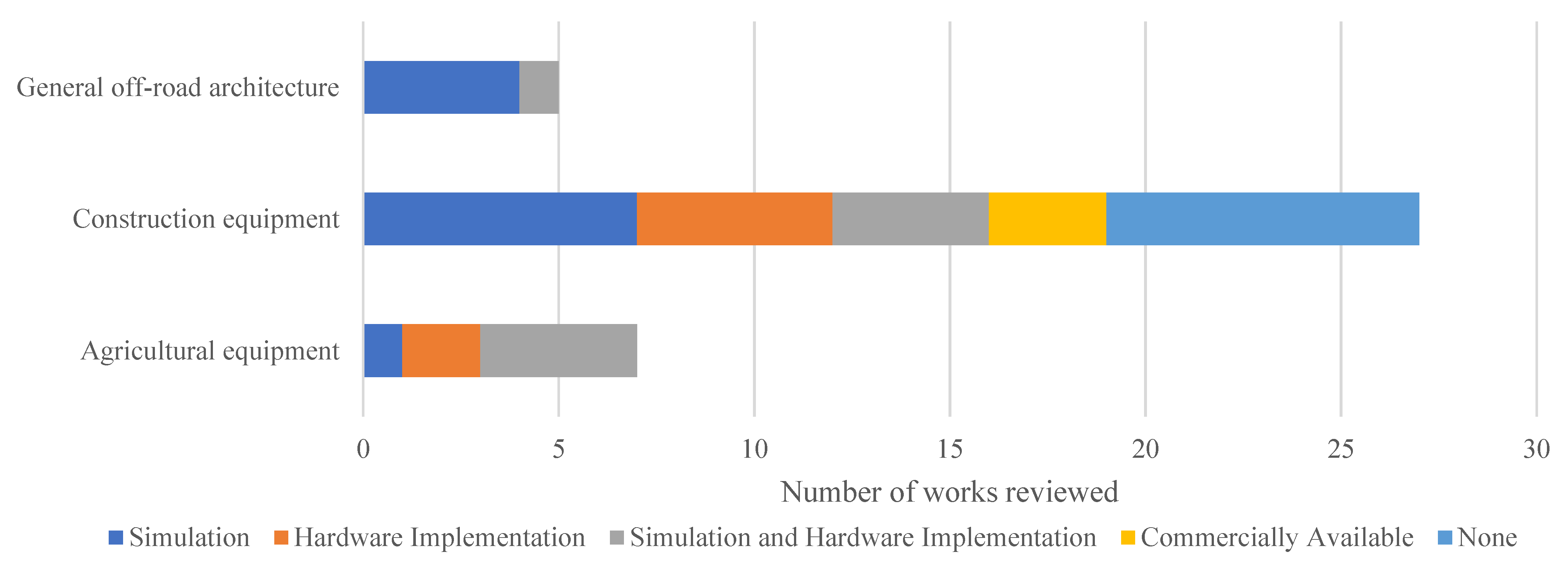
- Among the pieces of construction equipment, excavator and off-highway truck electrification attracted the most attention; efficiency gains and cost reduction have driven the commercialization of diesel-electric off-highway trucks.
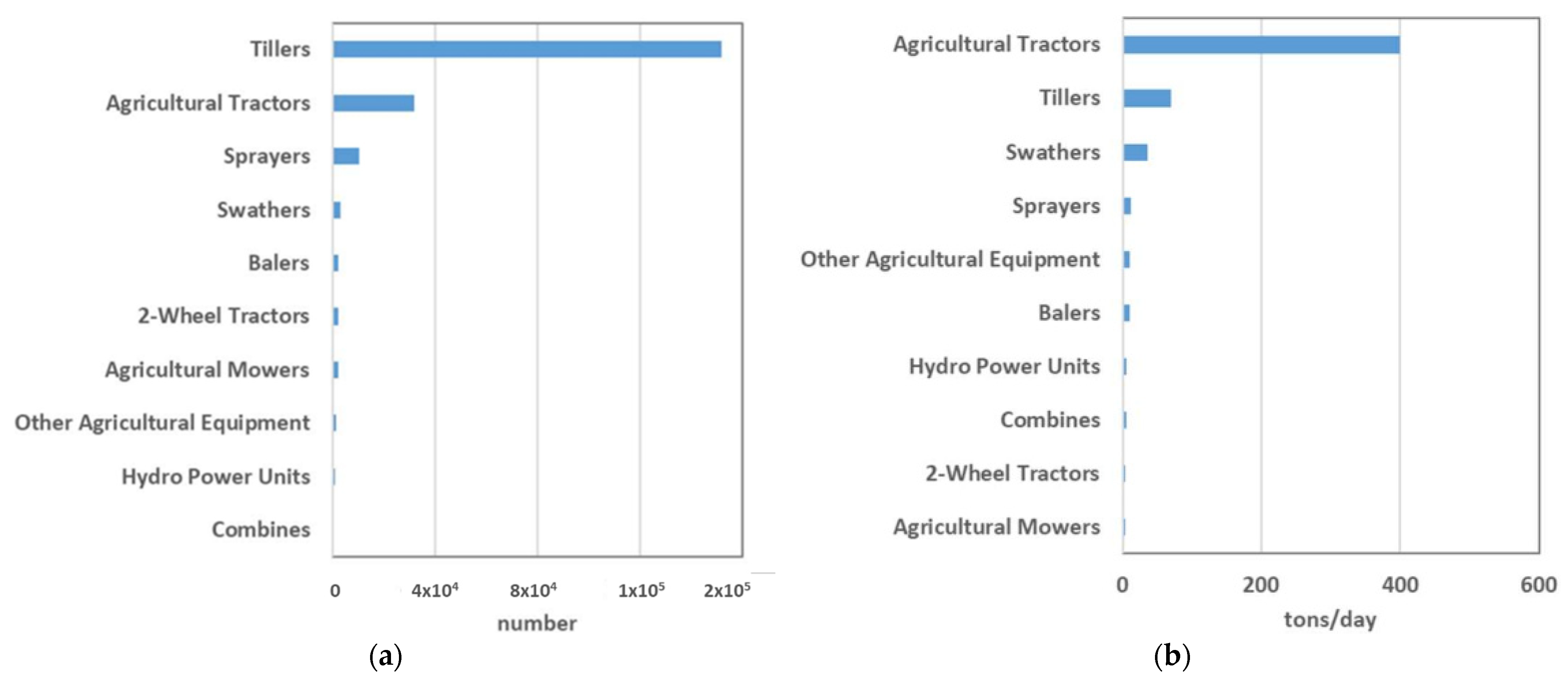
- Tractors were studied in a number of reviewed studies on agricultural equipment.
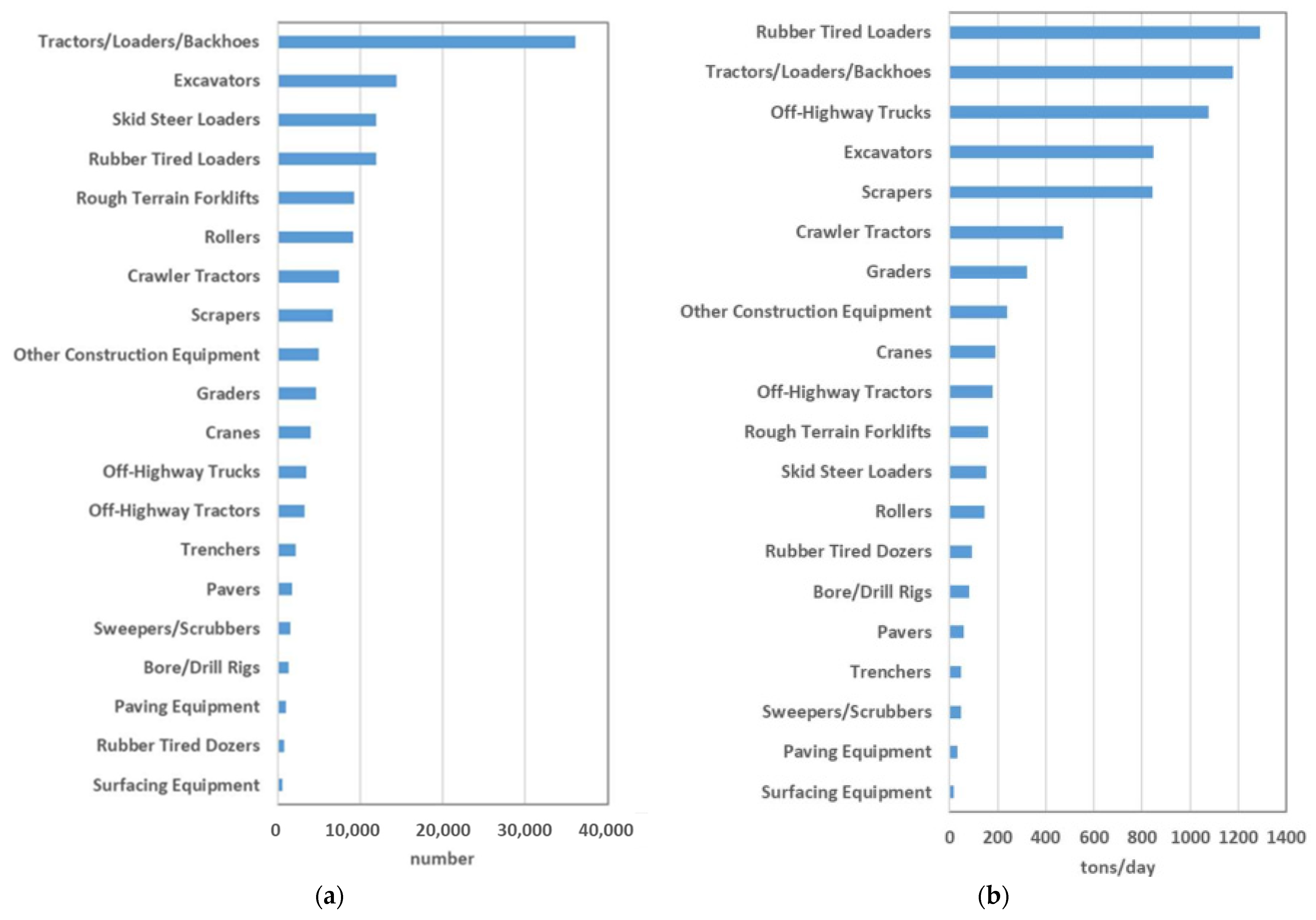
- Tractor–loader–backhoes, loaders, and scrapers in the construction equipment category, and tractors from the agricultural equipment sector demand increased research on electrification potential due to their high population and impact on emissions.
- With current technology, hybrids can appear useful for immediate implementation.
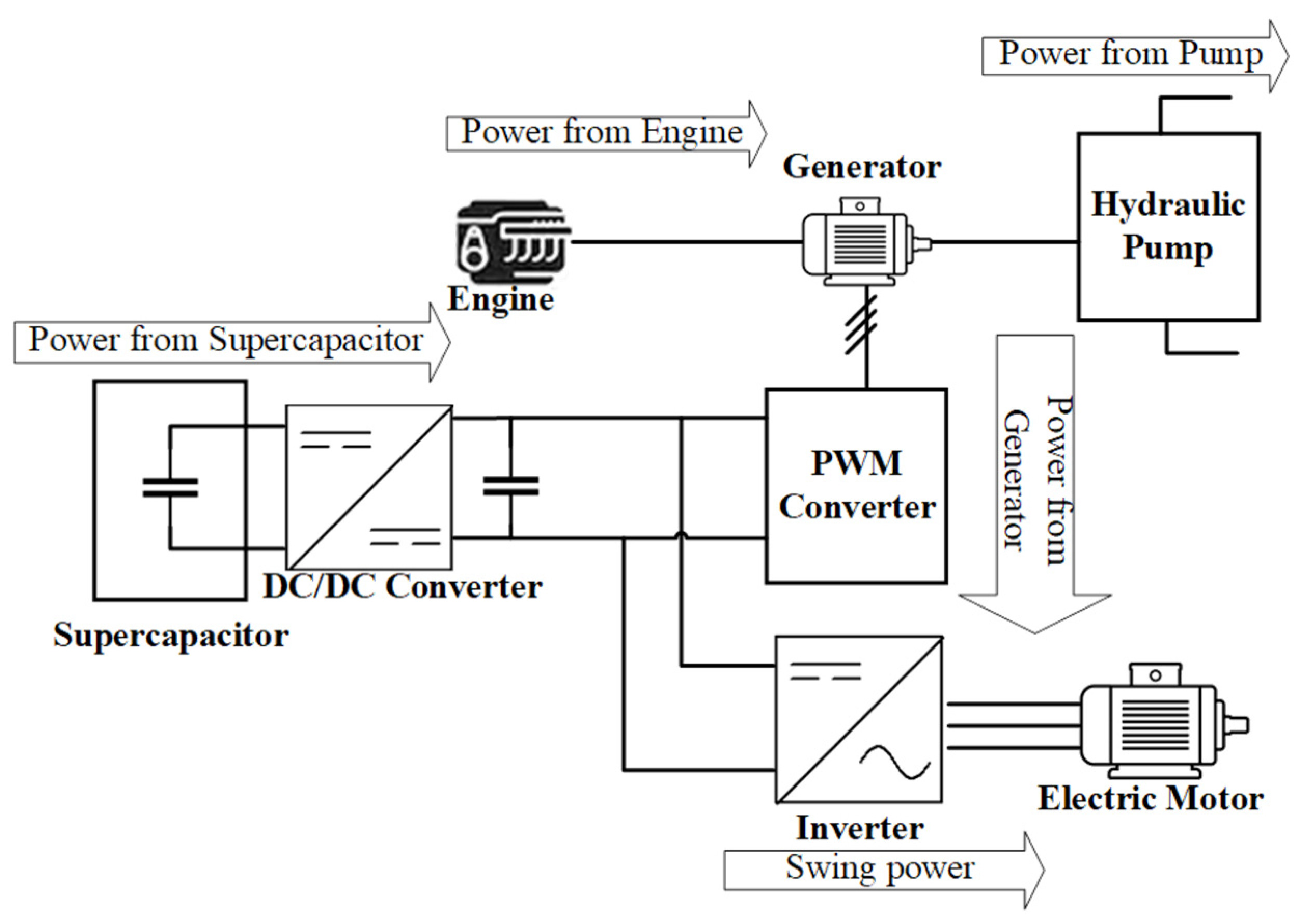
- Along with batteries, supercapacitors attracted significant attention, as the equipment tends to have a high power requirement. For the same reason, intermediate hydraulic energy storage and hybrid energy storage employing batteries and supercapacitors can prove beneficial for heavy-duty equipment usage.
- Along with the braking system, there are opportunities for energy regeneration from power tools employed by off-road equipment; prominent examples being the boom and swing of excavators.
- Electrification of off-road equipment can offer significant benefits in terms of increased efficiency and lower operating cost.
- The general shortcomings of EVs, including short range and long charging time, can translate into concerns about decreased downtime for off-road equipment. The higher cost further challenges their acceptance in a competitive market. However, increased research and development can aid in overcoming the current issues.
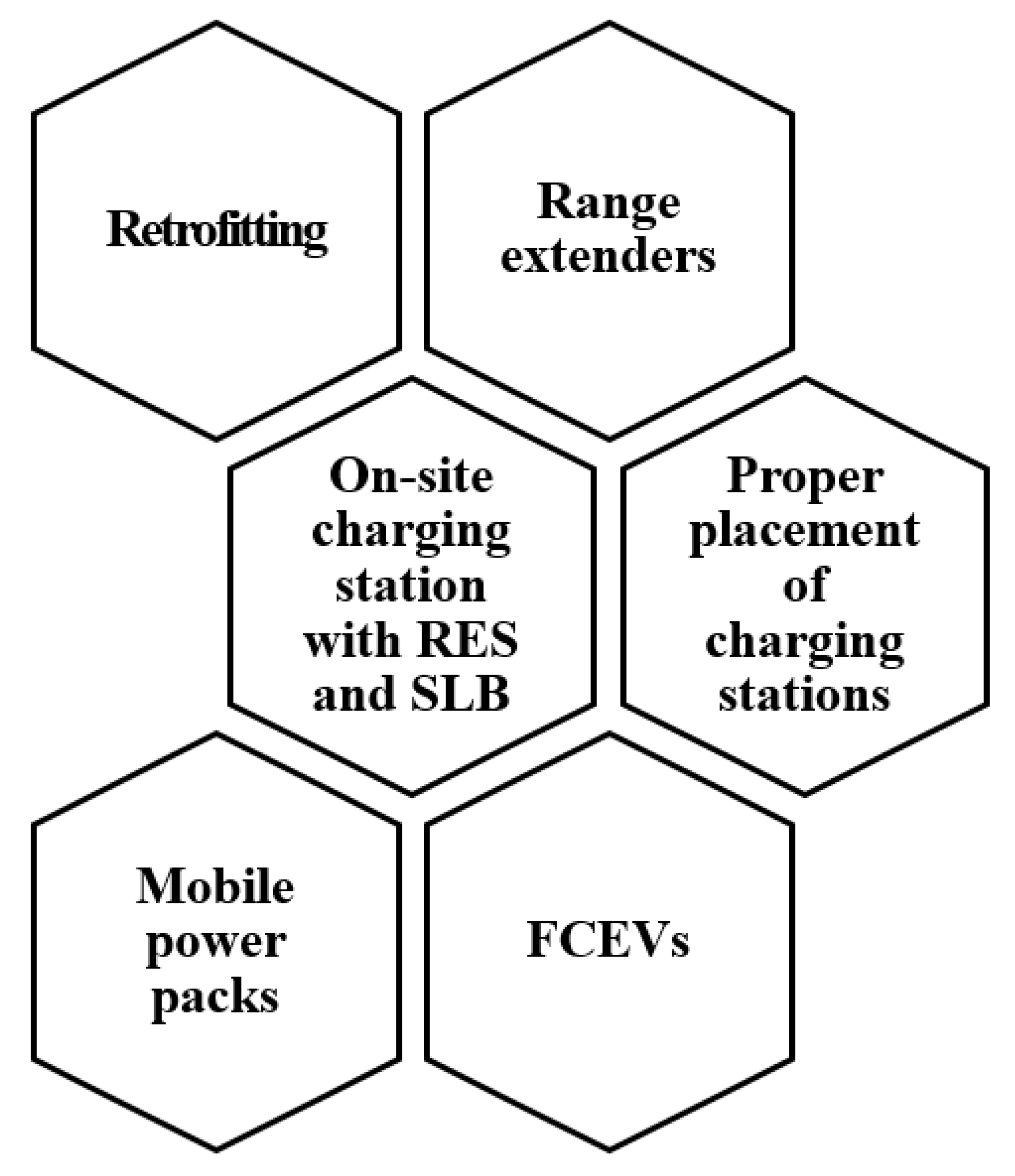
- An immediate solution to facilitating successful electrification of off-road equipment is retrofitting along with the use of range extenders, on-site power generation, and mobile chargers.
- Feasible existing and emerging technologies, and approaches for off-road equipment electrification considering the duty cycles, load factors, use case, and infrastructure requirement of different pieces of equipment.
- Ways to efficiently recapture energy in off-road equipment.
- Feasibility of mobile ICE and fuel cell generators for off-road equipment charging.
- Impact of regulations and incentives on the off-road equipment market.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Kast, J.; Vijayagopal, R.; Gangloff Jr, J.J.; Marcinkoski, J. Clean commercial transportation: Medium and heavy duty fuel cell electric trucks. Int. J. Hydrogen Energy 2017, 42, 4508–4517. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Onat, N.C.; Kucukvar, M.; Tatari, O. Carbon and energy footprints of electric delivery trucks: A hybrid multi-regional input-output life cycle assessment. Transp. Res. Part D Transp. Environ. 2016, 47, 195–207. [Google Scholar] [CrossRef]
- Bollinger Motors. Introducing the B2 Pickup Truck. Available online: https://www.bollingermotors.com/ (accessed on 24 February 2019).
- Rivian R1S. Available online: https://rivian.com/r1s (accessed on 21 July 2022).
- Rivian R1T. Available online: https://rivian.com/r1t (accessed on 21 July 2022).
- Mousazadeh, H.; Keyhani, A.; Mobli, H.; Bardi, U.; Lombardi, G.; el Asmar, T. Technical and economical assessment of a multipurpose electric vehicle for farmers. J. Clean. Prod. 2009, 17, 1556–1562. [Google Scholar] [CrossRef]
- Sharrard, A.L.; Matthews, H.S.; Roth, M. Environmental implications of construction site energy use and electricity generation. J. Constr. Eng. Manag. 2007, 133, 846–854. [Google Scholar] [CrossRef] [Green Version]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. Life-cycle assessment of a Solar Assist Plug-in Hybrid electric Tractor (SAPHT) in comparison with a conventional tractor. Energy Convers. Manag. 2011, 52, 1700–1710. [Google Scholar] [CrossRef]
- Monnay, C. Potential and Trends in Off-Highway Vehicles’ Electrification; Semcon: Vasteras, Sweden, 2017. [Google Scholar]
- DieselNet United States: Nonroad Diesel Engines. Available online: https://dieselnet.com/standards/us/nonroad.php#tier3 (accessed on 20 July 2022).
- DieselNet EU: Nonroad Engines. Available online: https://dieselnet.com/standards/eu/nonroad.php (accessed on 20 July 2022).
- Executive Department State of California. Executive Order N-79-20. Available online: https://www.gov.ca.gov/wp-content/uploads/2020/09/9.23.20-EO-N-79-20-Climate.pdf (accessed on 20 July 2022).
- Lin, T.; Wang, Q.; Hu, B.; Gong, W. Development of hybrid powered hydraulic construction machinery. Autom. Constr. 2010, 19, 11–19. [Google Scholar] [CrossRef]
- Yoo, B.S.; Cho, J.; Hwang, C.M.; Joh, J. Development of a simulation program for conceptual design of hybrid excavators. In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011; pp. 318–322. [Google Scholar]
- Wang, H.; Wang, Q.; Hu, B. A review of developments in energy storage systems for hybrid excavators. Autom. Constr. 2017, 80, 1–10. [Google Scholar] [CrossRef]
- Yang, C.; McCollum, D.; McCarthy, R.; Leighty, W. Meeting an 80% reduction in greenhouse gas emissions from transportation by 2050: A case study in California. Transp. Res. Part D Transp. Environ. 2009, 14, 147–156. [Google Scholar] [CrossRef] [Green Version]
- Parsons, M.B.; Mepsted, G.O. Development of off-road hybrid-electric powertrains and review of emerging battery chemistries. In Proceedings of the 5th IET Hybrid and Electric Vehicles Conference (HEVC 2014), London, UK, 5–6 November 2014; pp. 1–7. [Google Scholar]
- Aydin, M.; Guven, M.K. Comparing various PM synchronous generators: A feasible solution for high-power, off-highway, series hybrid, electric traction applications. IEEE Veh. Technol. Mag. 2014, 9, 36–45. [Google Scholar] [CrossRef]
- Kwon, T.S.; Lee, S.W.; Sul, S.K.; Park, C.G.; Kim, N.I.; Kang, B.I.; Hong, M.S. Power control algorithm for hybrid excavator with supercapacitor. IEEE Trans. Ind. Appl. 2010, 46, 1447–1455. [Google Scholar] [CrossRef]
- Wang, D.; Guan, C.; Pan, S.; Zhang, M.; Lin, X. Performance analysis of hydraulic excavator powertrain hybridization. Autom. Constr. 2009, 18, 249–257. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Du, S.; Ma, H.; Zhao, W.; Li, H. Energy management strategies for hybrid construction machinery: Evolution, classification, comparison and future trends. Energies 2019, 12, 2024. [Google Scholar] [CrossRef] [Green Version]
- Moreda, G.P.; Muñoz-García, M.A.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- California Air Resources Board OFFROAD2017—ORION. Available online: https://www.arb.ca.gov/orion/ (accessed on 15 July 2020).
- Gonzalez-de-Soto, M.; Emmi, L.; Benavides, C.; Garcia, I.; Gonzalez-de-Santos, P. Reducing air pollution with hybrid-powered robotic tractors for precision agriculture. Biosyst. Eng. 2016, 143, 79–94. [Google Scholar] [CrossRef]
- Wagh, R.V.; Sane, N. Electrification of heavy-duty and off-road vehicles. In Proceedings of the 2015 IEEE International Transportation Electrification Conference (ITEC), Chennai, India, 27–29 August 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Zhang, B.J.; Deng, Y.W.; Yu, D.J. An investigation on energy management system of CJY6470 parallel hybrid electric off-road vehicle with fuzzy logic. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference (VPPC), Harbin, China, 3–5 September 2008. [Google Scholar] [CrossRef]
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K.; Ho, H.F. Battery-management system (BMS) and SOC development for electrical vehicles. IEEE Trans. Veh. Technol. 2010, 60, 76–88. [Google Scholar] [CrossRef]
- Jackson, A.; Crolla, D.; Woodhouse, A.; Parsons, M. Improving performance of a 6×6 off-road vehicle through individual wheel control. SAE Technol. Pap. 2002, 2002, 724. [Google Scholar] [CrossRef]
- Sinkko, S.; Montonen, J.; Tehrani, M.G.; Pyrhönen, J.; Sopanen, J.; Nummelin, T. Integrated hub-motor drive train for off-road vehicles. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–11. [Google Scholar] [CrossRef]
- Baronti, F.; Fantechi, G.; Roncella, R.; Saletti, R.; Pede, G.; Vellucci, F. Design of the battery management system of LiFePO4 batteries for electric off-road vehicles. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Saeks, R.; Cox, C.J.; Neidhoefer, J.; Mays, P.R.; Murray, J.J. Adaptive Control of a Hybrid Electric Vehicle. IEEE Trans. Intell. Transp. Syst. 2002, 3, 213–233. [Google Scholar] [CrossRef]
- Escorts. Available online: https://www.escortsgroup.com/ (accessed on 1 February 2019).
- Escorts Unveils India’s First Electric & Hydrostatic Tractor and 100-HP Backhoe Loader. Available online: https://www.nbmcw.com/equipments/earthmoving-equipment/37066-escorts-unveils-india-s-first-electric-hydrostatic-tractor-and-100-hp-backhoe-loader.html (accessed on 1 February 2019).
- John Deere John Deere 644K Hybrid Wheel Loader. Available online: https://www.deere.com/en/loaders/wheel-loaders/644k-hybrid-wheel-loader/ (accessed on 7 February 2019).
- John Deere 326E Skid Steer. Available online: http://www.deere.com/en_US/docs/construction/skid_steer/326e/326E_Web_04_16_13_final.pdf (accessed on 7 February 2019).
- E-SERIES SKID STEER LOADERS. Available online: https://secure.viewer.zmags.com/services/DownloadPDF?publicationID=239afba9&selectedPages=all&pubVersion=33&print=true (accessed on 7 February 2019).
- Rountree, D. Tobroco-Giant gears up for its first CONEXPO-CON/AGG show. Available online: https://www.totallandscapecare.com/landscaping-equipment/tobroco-giant-gears-up-for-its-first-conexpo-conagg-show/ (accessed on 7 February 2019).
- Caterpillar New Electric Drive Cat® 988K XE Wheel Loader Offers Higher Fuel Efficiency and Lower Total Cost of Ownership. Available online: https://www.cat.com/en_US/news/machine-press-releases/new-electric-drive-cat-988kxe-wheel-loader-offers.html (accessed on 1 February 2019).
- Caterpillar 988K XE Wheel Loader. Available online: ttps://s7d2.scene7.com/is/content/Caterpillar/CM20170815-25630-31787 (accessed on 1 February 2019).
- Lion, S.; Michos, C.N.; Vlaskos, I.; Rouaud, C.; Taccani, R. A review of waste heat recovery and Organic Rankine Cycles (ORC) in on-off highway vehicle Heavy Duty Diesel Engine applications. Renew. Sustain. Energy Rev. 2017, 79, 691–708. [Google Scholar] [CrossRef]
- Achten, P.; Bv, I. A serial hydraulic hybrid drive train for off-road vehicles. Proc. Natl. Conf. Fluid Power 2008, 51, 515–521. [Google Scholar]
- Caterpillar Caterpillar Developing Battery-Electric Loader. Available online: https://www.constructionequipment.com/caterpillar-developing-battery-electric-loader (accessed on 13 February 2019).
- Caterpillar. Caterpillar to unveil new Cat® R1700 XE LHD battery electric vehicle with MEC500 Mobile Equipment Charger at MINExpo. Available online: https://www.cat.com/en_US/news/machine-press-releases/caterpillar-to-unveil-new-Cat-R1700XELHD-battery-electric-vehicle-with-MEC500-Mobile-Equipment-Charger-at-MINExpo.html (accessed on 4 August 2022).
- Yoon, J.I.; Truong, D.Q.; Ahn, K.K. A generation step for an electric excavator with a control strategy and verifications of energy consumption. Int. J. Precis. Eng. Manuf. 2013, 14, 755–766. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Li, Y.; Zhang, X.; Yang, J. A novel hydraulic excavator boom driving system with high efficiency and potential energy regeneration capability. Energy Convers. Manag. 2018, 166, 308–317. [Google Scholar] [CrossRef]
- Xiao, Y.; Guan, C.; Lai, X. Research on the design and control strategy for a flow-coupling-based hydraulic hybrid excavator. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1675–1687. [Google Scholar] [CrossRef]
- Kagoshima, M. Development of hybrid power train control system for excavator. In Proceedings of the Conference on Society of Automotive Engineers of Japan, Yokohama, Japan, 19–22 May 2003. [Google Scholar]
- Kagoshima, M.; Komiyama, M.; Nanjo, T.; Tsutsui, A. Development of new hybrid excavator. Kobelco Technol. Rev. 2007, 27, 39–42. [Google Scholar]
- Yao, H.; Wang, Q. Control strategy for hybrid excavator swing system driven by electric motor. IFAC Proc. Vol. 2013, 46, 109–115. [Google Scholar] [CrossRef]
- Lin, X.; Pan, S.X.; Wang, D.Y. Dynamic simulation and optimal control strategy for a parallel hybrid hydraulic excavator. J. Zhejiang Univ. Sci. A 2008, 9, 624–632. [Google Scholar] [CrossRef]
- Lee, S.; Lee, J.; Lee, H.; Lee, S.H. Modeling and control of Plug-In Hybrid Excavator. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 4653–4659. [Google Scholar] [CrossRef]
- Yoo, S.; An, S.; Park, C.G.; Kim, N. Design and control of hybrid electric power system for a hydraulically actuated excavator. SAE Int. J. Commer. Veh. 2010, 2, 264–273. [Google Scholar] [CrossRef]
- Xiao, Q.; Wang, Q.; Zhang, Y. Control strategies of power system in hybrid hydraulic excavator. Autom. Constr. 2008, 4, 361–367. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Zhang, X.; Zhao, B.; Yang, J. Efficiency improvement and evaluation of electric hydraulic excavator with speed and displacement variable pump. Energy Convers. Manag. 2017, 150, 62–71. [Google Scholar] [CrossRef]
- Richter, T.; Slezak, L.; Johnson, C.; Young, H.; Funcannon, D. Advanced Hybrid Propulsion and Energy Management System for High Efficiency, Off Highway, 240 Ton Class, Diesel Electric Haul Trucks; General Electric Co.: Boston, MA, USA, 2008; pp. 1–11. [Google Scholar]
- Esfahanian, E.; Meech, J.A. Hybrid Electric Haulage Trucks for Open Pit Mining. In Proceedings of the 16th IFAC Symposium on Automation in Mining, Mineral and Metal Processing, San Diego, CA, USA, 25–28 August 2013; Volume 46, pp. 104–109, ISBN 9783902823427. [Google Scholar] [CrossRef]
- Komatsu Komatsu Electric Drive Truck 830E-1AC. Available online: https://www.komatsuamerica.com/equipment/trucks/electric/830e-1ac (accessed on 12 February 2020).
- Mazumdar, J. All electric operation of ultraclass mining haul trucks. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Kwak, S.; Kim, T.; Park, G. Phase-redundant-based reliable direct AC/AC converter drive for series hybrid off-highway eeavy electric vehicles. IEEE Trans. Veh. Technol. 2010, 59, 2674–2688. [Google Scholar] [CrossRef]
- Lambert, F. This dumper truck is the world’s largest electric vehicle with a massive 700 kWh battery pack. Available online: https://electrek.co/2017/09/17/electric-dumper-truck-worlds-largest-ev-battery-pack/ (accessed on 12 February 2019).
- Mirzaei, S.; Fernandez, A. Retard system solution on electric mining trucks. In Proceedings of the 3rd IEEE International Symposium on Sensorless Control for Electrical Drives (SLED 2012), Milwaukee, WI, USA, 21–22 September 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Abolhasani, S.; Frey, H.C.; Kim, K.; Rasdorf, W.; Lewis, P.; Pang, S. Real-world in-use activity, fuel use, and emissions for nonroad construction vehicles: A case study for excavators. J. Air Waste Manage. Assoc. 2008, 58, 1033–1046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mashadi, B.; Emadi, S.A.M. Dual-mode power-split transmission for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2010, 59, 3223–3232. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q.; Lin, T. Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery. Autom. Constr. 2013, 30, 161–169. [Google Scholar] [CrossRef]
- Barbaccia, T.G. Deere’s bright ideas: Hybrid diesel-electric wheel loader, new line of skid steers and compact track loaders. Available online: https://www.equipmentworld.com/deeres-bright-ideas-hybrid-diesel-electric-wheel-loader-new-line-of-skid-steers-and-compact-track-loaders/ (accessed on 7 February 2019).
- Kagoshima, M. The development of an 8 tonne class hybrid hydraulic excavator SK80H. Kobelco Technol. Rev. 2012, 31, 6–11. [Google Scholar]
- Komatsu Electric Drive Truck 930E-4. Available online: https://www.komatsuamerica.com/equipment/trucks/electric/930e-4 (accessed on 12 February 2020).
- Caterpillar 795F AC Mining Truck. Available online: https://www.cat.com/en_US/products/new/equipment/off-highway-trucks/mining-trucks/18232553.html (accessed on 12 February 2019).
- Ueka, Y.; Yamashita, J.; Sato, K.; Doi, Y. Study on the development of the electric tractor-Specifications and traveling and tilling performance of a prototype electric tractor. Eng. Agric. Environ. Food 2013, 6, 160–164. [Google Scholar] [CrossRef]
- Florentsev, S.; Izosimov, D.; Makarov, L.; Baida, S.; Belousov, A. Complete traction electric equipment sets of electro-mechanical drive trains for tractors. In Proceedings of the 2010 IEEE Region 8 International Conference on Computational Technologies in Electrical and Electronics Engineering (SIBIRCON), Irkutsk, Russia, 11–15 July 2010; pp. 611–616. [Google Scholar] [CrossRef]
- Usinin, U.; Gladyshev, S.; Grigoryev, M.; Shishkov, A.; Bychkov, A.; Belousov, E. Electric drive of an industrial tractor. SAE Technol. Pap. 2013, 9. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. Optimal power and energy modeling and range evaluation of a solar assist plug-in hybrid electric tractor (SAPHT). Trans. ASABE 2010, 53, 1025–1035. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Keyhani, A.; Javadi, A.; Mobli, H.; Abrinia, K.; Sharifi, A. Evaluation of alternative battery technologies for a solar assist plug-in hybrid electric tractor. Transp. Res. Part D Transp. Environ. 2010, 15, 507–512. [Google Scholar] [CrossRef]
- Rossi, C.; Pontara, D.; Casadei, D. e-CVT power split transmission for off-road hybrid-electric vehicles. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Puhovoy, A.A. Agricultural tractor with pure electromechanical drivetrain. SAE Int. J. Commer. Veh. 2011, 4, 275–285. [Google Scholar] [CrossRef]
- Applications, M. New Holland’s NH2 fuel cell powered tractor to enter service. Fuel Cells Bull. 2012, 2012, 3–4. [Google Scholar] [CrossRef]
- Zhitkova, S.; Felden, M.; Franck, D.; Hameyer, K. Design of an electrical motor with wide speed range for the in-wheel drive in a heavy duty off-road vehicle. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1076–1082. [Google Scholar] [CrossRef]
- Singh, B.N.; Wanner, K.D. Novel and ruggedized power electronics for off-highway vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 1043–1048. [Google Scholar]
- Singh, B. Novel and ruggedized power electronics for off-highway vehicles. IEEE Electrif. Mag. 2014, 2, 31–41. [Google Scholar] [CrossRef]
- Minav, T.A.; Laurila, L.I.E.; Pyrhönen, J.J. Analysis of electro-hydraulic lifting system’s energy efficiency with direct electric drive pump control. Autom. Constr. 2013, 30, 144–150. [Google Scholar] [CrossRef]
- Ho, T.H.; Ahn, K.K. Design and control of a closed-loop hydraulic energy-regenerative system. Autom. Constr. 2012, 22, 444–458. [Google Scholar] [CrossRef]
- Xia, L.; Quan, L.; Ge, L.; Hao, Y. Energy efficiency analysis of integrated drive and energy recuperation system for hydraulic excavator boom. Energy Convers. Manag. 2018, 156, 680–687. [Google Scholar] [CrossRef]
- Lin, T.; Huang, W.; Ren, H.; Fu, S.; Liu, Q. New compound energy regeneration system and control strategy for hybrid hydraulic excavators. Autom. Constr. 2016, 68, 11–20. [Google Scholar] [CrossRef]
- Lin, T.; Wang, Q.; Hu, B.; Gong, W. Research on the energy regeneration systems for hybrid hydraulic excavators. Autom. Constr. 2010, 19, 1016–1026. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q. Efficiency analysis and evaluation of energy-saving pressure-compensated circuit for hybrid hydraulic excavator. Autom. Constr. 2014, 47, 62–68. [Google Scholar] [CrossRef]
- Chen, M.; Zhao, D. The gravitational potential energy regeneration system with closed-circuit of boom of hydraulic excavator. Mech. Syst. Signal Process. 2017, 82, 178–192. [Google Scholar] [CrossRef]
- Yu, S.; Du, Q.; Diao, H.; Shu, G.; Jiao, K. Effect of vehicle driving conditions on the performance of thermoelectric generator. Energy Convers. Manag. 2015, 96, 363–376. [Google Scholar] [CrossRef]
- Åman, R.; Handroos Pavel Ponomarev, H.; Pyrhönen, J. Utilisation of Electro - Hydraulic Hybrid Actuator Systems in Off—Highway Working Vehicles. In Proceedings of the 8th International Conference on Fluid Power Transmission and Control, Hangzhou, China, 9–11 April 2013. [Google Scholar]
- Redpath, D.A.G.; McIlveen-Wright, D.; Kattakayam, T.; Hewitt, N.J.; Karlowski, J.; Bardi, U. Battery powered electric vehicles charged via solar photovoltaic arrays developed for light agricultural duties in remote hilly areas in the Southern Mediterranean region. J. Clean. Prod. 2011, 19, 2034–2048. [Google Scholar] [CrossRef]
- Sujitha, N.; Krithiga, S. RES based EV battery charging system: A review. Renew. Sustain. Energy Rev. 2017, 75, 978–988. [Google Scholar] [CrossRef]
- Bhatti, A.R.; Salam, Z.; Ashique, R.H. Electric Vehicle Charging Using Photovoltaic based Microgrid for Remote Islands. Energy Procedia 2016, 103, 213–218. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel solar powered electric vehicle charging station with the capability of vehicle-to-grid. Sol. Energy 2017, 142, 136–143. [Google Scholar] [CrossRef]
- Goli, P.; Shireen, W. PV powered smart charging station for PHEVs. Renew. Energy 2014, 66, 280–287. [Google Scholar] [CrossRef]
- Bhatti, A.R.; Salam, Z.; Aziz, M.J.B.A.; Yee, K.P.; Ashique, R.H. Electric vehicles charging using photovoltaic: Status and technological review. Renew. Sustain. Energy Rev. 2016, 54, 34–47. [Google Scholar] [CrossRef]
- Robalino, D.M.; Kumar, G.; Uzoechi, L.O.; Chukwu, U.C.; Mahajan, S.M. Design of a docking station for solar charged electric and fuel cell vehicles. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; pp. 655–660. [Google Scholar]
- van der Kam, M.; van Sark, W. Smart charging of electric vehicles with photovoltaic power and vehicle-to-grid technology in a microgrid; a case study. Appl. Energy 2015, 152, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Laserna, E.; Sarasketa-Zabala, E.; Sarria, I.V.; Stroe, D.-I.; Swierczynski, M.; Warnecke, A.; Timmermans, J.-M.; Goutam, S.; Omar, N.; Rodriguez, P. Technical viability of battery second life: A study from the ageing perspective. IEEE Trans. Ind. Appl. 2018, 54, 2703–2713. [Google Scholar] [CrossRef]
- Hossain, E.; Murtaugh, D.; Mody, J.; Faruque, H.M.R.; Sunny, M.S.H.; Mohammad, N. A comprehensive review on second-life batteries: Current state, manufacturing considerations, applications, impacts, barriers & potential solutions, business strategies, and policies. IEEE Access 2019, 7, 73215–73252. [Google Scholar]
- Freewire Technologies MOBI CHARGER SERIES. Available online: https://freewiretech.com/ev-charging (accessed on 22 July 2022).
- Power Mobile. Available online: https://www.nio.com/nio-power (accessed on 31 August 2020).
- Volkswagen. Electrifying World Premiere: Volkswagen offers First Glimpse of Mobile Charging Station. Available online: https://www.volkswagen-newsroom.com/en/press-releases/electrifying-world-premiere-volkswagen-offers-first-glimpse-of-mobile-charging-station-4544 (accessed on 22 February 2020).
- Robledo, C.B.; Oldenbroek, V.; Abbruzzese, F.; van Wijk, A.J.M. Integrating a hydrogen fuel cell electric vehicle with vehicle-to-grid technology, photovoltaic power and a residential building. Appl. Energy 2018, 215, 615–629. [Google Scholar] [CrossRef]
- Hyundai 2022 NEXO Fuel Cell. Available online: https://www.hyundaiusa.com/us/en/vehicles/nexo (accessed on 22 July 2022).

| Reference | Year | EV Type | Components of Interest | Control Algorithm | Potential Vehicle Application | Implementation Level |
|---|---|---|---|---|---|---|
| Saeks et al. [32] | 2002 | FCEV |
|
|
| Simulation |
| Zhang et al. [27] | 2008 | Parallel PHEV |
|
|
| Simulation |
| Baronti et al. [31] | 2013 | General |
| - |
| Simulation |
| Parsons et al. [18] | 2014 | Series HEV |
| - |
| Simulation andHardware implementation |
| Sinkko et al. [30] | 2014 | HEV |
| - |
| Simulation |
| Reference | Year | EV Type | Components of Interest | Control Algorithm | Implementation Level | Equipment Type |
|---|---|---|---|---|---|---|
| Usinin et al. [72] | 2013 | Series HEV |
| Separate excitation for generator and motor, motor torque control by controlling armature current and magnetic flux. | Simulation | Tractor |
| Mousazadeh et al. [73] | 2010 | BEV |
| Solar panel supplied 18% of required power, rest taken from grid. | Simulation and hardware implementation | Tractor |
| Ueka et al. [70] | 2013 | BEV |
| A rotary tiller along with the four wheels driven by the motor through reduction gear. | Simulation and hardware implementation | Tractor |
| Rossi et al. [75] | 2014 | Parallel HEV |
| Set up for using ICE’s maximum torque operating region. | Simulation and hardware implementation | Tractor |
| Gonzalez-de-Soto et al. [25] | 2016 | ICE vehicle with fuel cell-powered PTO |
| The fuel cell system powers the PTO, while ICE runs the drivetrain. Battery stores excess energy. | Simulation and hardware implementation | Tractor |
| Reference | Manufacturer | Model | EV Type | Components of Interest | Control Strategy | Equipment Type | Implementation Level |
|---|---|---|---|---|---|---|---|
| [71] | Ruselprom | Belarus-3023 | Series HEV |
| ICE powered electric drivetrain, electricity driven PTO. | Tractor | Pre-production versions produced |
| [77] | New Holland | NH2 | FCEV |
| Traction and PTO operation handled by separate motors. | Tractor | Hardware implementation |
| Reference | Year | Regenerative Component | Vehicle Application | Implementation Level | Equipment Type |
|---|---|---|---|---|---|
| Minav et al. [81] | 2013 | Lift | Construction | Simulation | Forklift |
| Mazumdar [58] | 2013 | Brake | Construction | Simulation | Off-highway truck |
| Esfahanian et al. [57] | 2013 | Brake | Construction | - | |
| [60] | 2017 | Brake | Construction | Hardware implementation | |
| Yoon et al. [45] | 2013 | Boom | Construction | Simulation | Excavator |
| Wang et al. [86] | 2014 | Hydraulic cylinder | Construction | Simulation | |
| Lin et al. [84] | 2016 | Boom | Construction | Simulation and hardware implementation | |
| Lin et al. [85] | 2010 | Boom | Construction | Simulation | |
| Chen et al. [87] | 2017 | Boom | Construction | Simulation and hardware implementation | |
| Yoo et al. [53] | 2009 | Swing | Construction | Simulation and hardware implementation | |
| Wang et al. [65] | 2013 | Swing and boom | Construction | Simulation | |
| Singh et al. [80] | 2009 | Turbocharger | Construction Agriculture | - | All turbocharged equipment |
| Yu et al. [88] | 2015 | Turbocharger | Construction Agriculture | - | |
| Åman et al. [89] | 2013 | Electro-hybrid actuator | Construction Agriculture | Simulation | Off-highway equipment |
| Implication | Environmental | Operational | Economic | |
|---|---|---|---|---|
| Advantage | ||||
|
|
|
| |
|
|
|
| |
|
|
|
| |
| - |
|
| |
| Concern | Solution | |
|---|---|---|
| Technical issues | Short range |
|
| Long charging time |
| |
| Dynamic and high power requirement |
| |
| Logistics issues | Lack of research |
|
| Inadequate charging infrastructure |
| |
| Charging station placement |
| |
| Market issues | Cost |
|
| Competition |
| |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Un-Noor, F.; Wu, G.; Perugu, H.; Collier, S.; Yoon, S.; Barth, M.; Boriboonsomsin, K. Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities. Vehicles 2022, 4, 780-807. https://doi.org/10.3390/vehicles4030044
Un-Noor F, Wu G, Perugu H, Collier S, Yoon S, Barth M, Boriboonsomsin K. Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities. Vehicles. 2022; 4(3):780-807. https://doi.org/10.3390/vehicles4030044
Chicago/Turabian StyleUn-Noor, Fuad, Guoyuan Wu, Harikishan Perugu, Sonya Collier, Seungju Yoon, Mathew Barth, and Kanok Boriboonsomsin. 2022. "Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities" Vehicles 4, no. 3: 780-807. https://doi.org/10.3390/vehicles4030044
APA StyleUn-Noor, F., Wu, G., Perugu, H., Collier, S., Yoon, S., Barth, M., & Boriboonsomsin, K. (2022). Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities. Vehicles, 4(3), 780-807. https://doi.org/10.3390/vehicles4030044