Abstract
Recent developments in emissions regulations are pushing Non-Road Mobile Machineries manufacturers towards the adoption of more efficient solutions to reduce the amount of pollutants per unit of work performed. Electrification can be a reasonable alternative to traditional powertrain to achieve this goal. The higher complexity of working machines architectures requires, now more than ever, better design and testing methodologies to better integrate electric systems into mechanical and hydraulic layouts. In this work, the attention focused on the use of a Hardware in the Loop (HIL) approach to test performance of an energy management strategy (called load observer) developed specifically for an orchard tractor starting from field characterization. The HIL bench was designed to replicate a scaled architecture of a parallel hybrid electric tractor at mechanical and electrical level. The vehicle behavior was simulated with a personal computer connected on the CAN BUS network designed for the HIL system. Several tasks were simulated starting from data gathered during field measurements of a daily use of the machine. Results showed good performance in terms of load split between the two power sources and stability of the speed control although the variability of the applied load.
1. Introduction
Electric systems have demonstrated their capabilities in improving powertrain efficiency in vehicles applications [1,2]. Their adoption in hybrid electric vehicles (HEVs) and battery electric vehicles (BEVs) is increasing year by year especially in the automotive field contributing to the overall reduction of transportation emissions [3,4].
Recently, the increasing demand for more efficient vehicles involved Non-Road Mobile Machineries (NRMMs) or the wide population of machines used in off road applications. This category comprises construction, handling and agricultural machines, usually powered by diesel engines, known for their contribution to air pollution due to the production of CO, NOx, hydrocarbons and particulate matter [5,6,7]. Emissions regulations [8,9] are pushing original equipment manufacturers (OEMs) towards the adoption of new solutions to meet these strict requirements. There are two available options: the use of exhaust gas after-treatment systems or the overall efficiency improvement of the machine aimed to achieve a lower footprint per unit of work performed. The first solution includes the adoption of filtering systems whose size increases with the amount of exhaust gas to be treated [10]. With this solution, on board vehicle space is used without any improvement with respect to functionalities of the architecture. The second approach aims to reduce the emissions footprint improving the overall performance of the machine. As discussed in literature, NRMMs electrification can improve their efficiency [11,12,13,14]. The adoption of electric machines and battery technologies together with efficient diesel engines or, in some cases, replacing them in full electric configurations can reduce or completely avoid local pollutant emissions [15].
Common characteristics among working machines are usually the more or less intense power requirements related to the tasks they need to accomplish. In many cases, these machines may need to operate more than eight hours per day requiring a high capacity of the energy storage or a fast way to recharge in order to reduce the amount of stop time. Traditional diesel systems do not suffer this problem thanks to the fast refueling time. On the other hand, this requirement becomes the biggest challenge to overcome when it comes to NRMM electrification. Full electric vehicles rely only on the energy stored on their on-board battery pack. Performance in terms of power and energy densities [16] of current lithium-ion technologies available on the market determine the success of an electric NRMM. Not all the NRMMs can be fully electrified and specific design approaches are required to evaluate electrification feasibility [17]. Except for very special cases [18], the architectural topology must be designed defining the best hybridization factor (HF) [11] to optimize performance and emissions. Today, hybrid solutions still represent the most promising option to improve emissions footprint and productivity as well. A hybrid powertrain consists of at least two different types of power sources. In vehicle applications, the most common solutions aim to take advantage of the joint operation of a thermal engine and one or more electric machines to provide power for the mechanical transmission [19,20,21]. Electric machines can be actuated both as motors to provide power to a mechanical path or as generators if the power has to be extracted from the mechanical path. The electric energy provided by or to the electrical system derives from the proper actuation of motors and generators, or can be supplied by or to an energy storage system (ESS), usually the battery pack in a hybrid electric vehicle. The higher the number of components involved in the hybrid architecture, the higher the complexity of the control strategy in charge of the energy management. Indeed, NRMM applications of hybrid powertrains must be able to provide a comparable amount of power on different mechanical paths such as the drivetrain or external devices pulled and powered by the machine. These so called implements must receive power from a power take off (PTO) connection to work properly because they are usually not equipped with an autonomous power source. Several studies in the literature showed the possibility of performance optimization in working vehicles through proper energy management strategies [22,23,24]. However, it must be noted that these techniques are specifically designed for the tasks associated with the specific type of machine. Unlike automotive applications, NRMM cover a wide range of operating fields and it is very rare to have standard testing cycles representative enough to design common solutions. Instead, most of the time, control strategies must focus on a specific set of tasks which better represent the average use of a certain machine. Thus, certain fields still lack comprehensive exploration of proper control strategies for hybrid electric solutions.
The need for energy management strategies for hybrid electric working vehicles requires also proper simulation tools to test algorithms before vehicle implementations [18,25,26,27]. The control architecture must be tested at the software and hardware level in real time environments where all vehicles conditions and signals can be safely simulated to assess performance and stability of the proposed strategy. Using a Model-Based Design approach [28,29,30,31,32] it is possible to test both the software and hardware configuration of the vehicle control unit (VCU) in a Hardware in the Loop (HIL) simulation. As described in [33,34], there are several levels of HIL architectures depending on how many vehicle subsystems are replicated with real hardware and how much of the system is numerically simulated in real time. In this work, the attention focused on an HIL simulation of a hybrid electric orchard tractor to test the proposed load observer energy management strategy. Several studies available in the literature demonstrate the growing interest for tractor electrification [35,36,37,38,39,40] and in general of agriculture machineries. However, low attention is dedicated on the development of software and hardware tools to test specifically designed control strategies which can optimize these new type of powertrains. The HIL simulator developed in this work aimed to replicate a parallel hybrid electric powertrain architecture for an orchard tractor. The hybrid solution consisted of the use of a diesel engine smaller than the one used in the traditional architecture (almost 30% smaller) coupled with an electric motor able to cover peaks in power demand thanks to an electric battery pack. The architecture was replicated on the HIL bench developed in this work while vehicle behavior was entirely simulated adjusting in a closed loop the electric brake, thus the load applied to the hybrid power unit. The simulation framework of the proposed HIL bench must consider the equivalent load related to the two main power paths: the wheels and the PTO devices. The only electric brake available must be controlled to load the hybrid power unit with the same braking torque applied to the traditional diesel power unit which performance were measured on the field. However, to propose a methodology that could be easily replicated with low hardware costs, the characterization was based on parameters provided by the tractor VCU on its CAN BUS network. Thus, measuring the engine load for a given driver set working speed and attached implement, the goal on the bench was to set the braking system in order to load the diesel simulator of the traditional architecture as the working conditions loaded the real tractor during field activities. This was a crucial characteristic for the bench that allowed to directly compare bench performance of the proposed hybrid power unit with field measurements of the traditional diesel powered tractor. Given this software/hardware architecture, the VCU and the proposed control strategy were tested according to working tasks derived from experimental characterization of a real diesel powered orchard tractor.
2. Use Case Description
NRMM is a classification which covers a wide range of working machines mainly, but not only, from construction, handling and agriculture. No standard shared testing procedures are currently available at vehicle level. OEM diesel engine manufacturers usually consider standard loading profiles to test pollutant emissions [41,42] but, to the author’s knowledge, no clear connection can be found in literature between these cycles and field mission profiles in the different sectors of application [8]. To evaluate vehicle performance, NRMM manufacturers usually perform proprietary testing procedures derived from their experience in the field and from customers’ feedback. However, there is still a lack of shared information or standard approaches to define a common baseline for performance evaluations. Thus, field operation analyses of the machine under investigation still remain a crucial requirement when it comes to the exploration of new powertrain solutions. In this work, the attention focused on a special class of agricultural vehicles known as orchard tractors (Figure 1). They are very small tractors used mainly in fruit crops, vineyards and orchards which are known for the narrow distance between each plant row. Technical characteristics of the case study considered in this work are shown in Table 1. Orchard tractors are equipped with relatively small diesel engines which allow to have enough power reservoir for the most common tasks to be accomplished in the aforementioned fields.
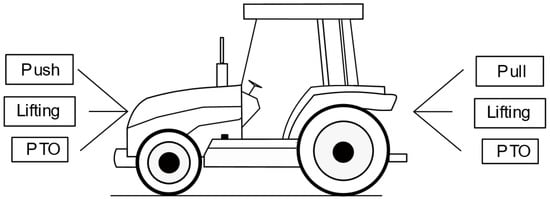
Figure 1.
Tractor’s main duties.

Table 1.
Main characteristics of the orchard tractor.
For the purpose of this work, an orchard tractor was characterized during field operations to establish the main characteristics of the tasks to be simulated on the HIL bench. The attention focused on monitoring tractor engine data and driver commands available on the CAN BUS network of the vehicle according to the SAE J1939 standard [43,44]. The parameters of interest identified as representative of the actual engine and vehicle operating conditions were:
- The driver pedal signal as reference of the desired working speed.
- The engine rotational speed.
- The actual engine load estimated by the VCU according to the characteristic map of the engine.
- Vehicle speed.
It is possible to find these parameters in a CAN BUS stream following the standard SAE J1939 as described in the Table 2. Given the parameter group number (PGN) reference and the start position expressed as Start_Byte.Start_bit (with Start_bit usually omitted if the information is distributed entirely on one or more bytes), it is possible to convert the hexadecimal raw data from the stream into the desired decimal value according to this simple equation:
Table 2.
Parameter of interest according to SAE J1939.
Regarding the tasks identified as candidates to be simulated on the HIL bench, three main activities were considered:
- The use of a shredding tool (Figure 2a).
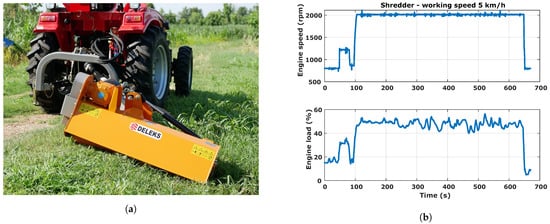 Figure 2. Shredding tool (a) and experimental data from field measurements (b).
Figure 2. Shredding tool (a) and experimental data from field measurements (b). - The use of a rotary harrow (Figure 3a).
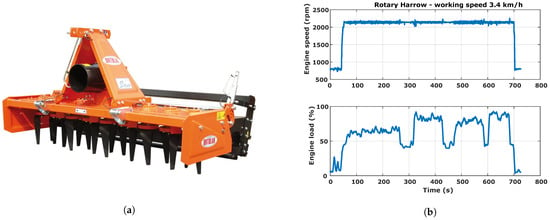 Figure 3. Harrowing tool (a) and experimental data from field measurements (b).
Figure 3. Harrowing tool (a) and experimental data from field measurements (b). - The use of an atomizer (Figure 4a).
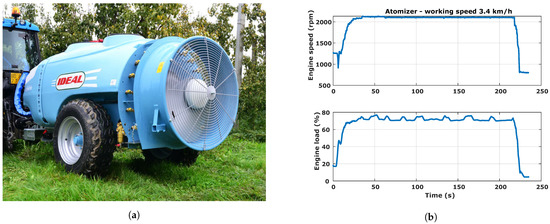 Figure 4. Atomizer (a) and experimental data from field measurements (b).
Figure 4. Atomizer (a) and experimental data from field measurements (b).
All these activities involved the use of the tractor PTO as means to transfer power to those implements which do not come with an autonomous energy source. Moreover, all these tools need to be pulled on the field, involving the driveline with different levels of power effort. The use of a shredding tool (Figure 2a) is usually an activity which barely involves half of the nominal power of the engine output as shown in Figure 2b. Except for very special cases depending on the type of grass to be treated, the average power demand of this task is quite constant during operations. The use of a rotary harrow (Figure 3b) is a very demanding task for the high average level and variability of the power demand. As shown in Figure 3b, except for very special terrain conditions (composition and humidity levels), the average power demand is below the engine nominal power but it is possible to have conditions where full power may be required. Lastly, the atomizer (Figure 4a) is a very common tool in orchards and vineyards to treat plants with proper pesticides to preserve them from bugs attacks. Using an atomizer is generally a task with a very regular power demand with a medium high intensity level of the engine effort. However, also in this case, the power demand is usually well below the nominal power output of the thermal engine as demonstrated in Figure 4b. Table 3 summarizes results from experimental measurements on the three considered PTO tasks performed in the framework of this work. Values show an estimation of the power demand characteristics associated with the PTO power output towards the implement of the tractor. To this, power required to move the vehicle must be added to have the engine load. However, usual working speed for these tasks are very low and regular, with no frequent accelerations and decelerations except for the maneuvers required to approach the following row to be treated.
Table 3.
Power take off (PTO) task statistics—Power (kW).
Starting from the data gathered with field measurements, it is possible to think about a hybrid powertrain for the tractor. One important aspect must be kept in mind when it comes to tractor electrification. Regardless of the specific configuration, the user should be always able to provide power to the two main power path: the wheels to drive the tractor and the PTO for any attached device which could require power. This is a substantial difference with respect to the solutions proposed in the automotive field where the main power user is the driveline that propels the vehicle. However, it is possible to take advantage of the experience reached on road transport electrification to propose solutions compatible with this requirement. Considering the results of the characterization activity, it is reasonable to think about a parallel hybrid electric layout with a smaller diesel engine to provide the average power of the worst working task (the use of a rotary harrow in this case) coupled with an electric motor in parallel to provide the required extra power when needed. The hybrid solution to be investigated considered a diesel engine with a nominal power output of 54 kW at 2300 rpm and an electric motor with 30 kW at 2300 rpm. The overall peak power capability of this hybrid power unit is higher than the traditional diesel power unit of the studied vehicle. The control strategy tested with the HIL system should prove to be able to split the power demand among the two power sources minimizing the amount of electric energy to preserve the slowest rechargeable storage unit on the hybrid vehicle.
3. The Hybrid Control Unit
Modern vehicles can be seen as a network of several nodes/controllers in charge of the management of all the different functionalities available for the final user. These nodes are usually connected on the same communication network to exchange information about vehicle operating conditions or user inputs. In complex systems such as off road vehicles, dedicated controllers are used to manage and actuate each specific subsystem which may come from different suppliers. Thus, a supervisory vehicle controller is usually designed to oversees the operations of the controllers on the network. The vehicle control unit is a controller in charge of supervising and coordinating the operations of the different nodes of the vehicle network. This unit usually collects the user inputs and provide the proper actuation signals or digital commands to the other nodes on the network according to specific strategies decided at manufacturer level.
On a hybrid electric powertrain, several controllers would be in charge of the low level management of each power subsystem:
- The thermal engine would be controlled by its own engine control unit (ECU) usually provided by the OEM manufacturer.
- Each electric machine would be actuated by its own power converter; at least one power control unit (PCU) is required to control the power electronics hardware of each converter.
- A control unit may be required to actuate special mechanical transmissions or power split devices.
- If the system is equipped with a battery pack, at least one battery management system (BMS) is required to guarantee the safe operation of each cell in the pack. Depending on the specific control architecture, several BMS may be used [45]. The communication with the vehicle network can be managed by a master BMS or with a de-centralized approach where each node provides batteries information on the network.
- A dedicated control unit to manage the charging process can be also considered for plug-in vehicles which need to be interfaced with the grid.
In such a complex system, the benefits of a centralized vehicle controller known as hybrid control unit (HCU) are clear. All the mentioned subsystems may be developed independently by different manufacturers. The possibility to receive actuation commands from a common communication network makes it easy to integrate each subsystem in a vehicle. The central HCU would be in charge of their management and coordination depending on the user inputs and the specific energy management strategy developed for the application.
The Load Observer Strategy
An energy management strategy is an algorithm developed to optimize the operating point of each subsystem of the hybrid electric powertrain depending on the working load and on the actual state of the system itself. The development of control strategies for working vehicles is strongly related to the tasks these machines are designed for and to the special characteristics of each of them. Considering the case study of this work, an orchard tractor is a relatively small machine compared to the amount of power it is able to provide. This means that the available on board space is precious and must be carefully used to provide functionalities to the final user. In case of battery powered vehicles, the size of the battery pack is directly related to the amount of energy to be stored. The more the energy management strategy would rely on the electric system to provide power, the higher the on board volume required would be for a proper battery pack able to meet the daily working cycles. For the proposed parallel hybrid tractor architecture, a specific energy management strategy was developed. The primary goal of the strategy was to maximize the use of the thermal engine as primary energy source. This is because farmers need to operate for long working sessions (up to 10 h continuously) limiting as much as possible refueling/recharging time to lower costs and increase productivity. If the power demand is compatible with the nominal power output of the internal combustion engine (ICE), the electric system should be preserved to be ready for future and more demanding tasks.
Figure 5 shows the graphical representation of the control architecture implementing the energy management strategy of the parallel hybrid electric orchard tractor, called load observer. The hybrid system is thought in a Master–Slave configuration, with the ICE as Master node and the electric Traction motor (Tm as in Figure 5) as Slave device. Off-road diesel engines are usually provided by manufacturers with their own ECUs in charge of controlling their speed according to the user input which set the engine speed setpoint. Given this control approach, the higher the mechanical load applied to the engine, the lower its torque reservoir. Thus, the ECU continuously provide an estimation of the current engine load conditions as percentage load with respect to the maximum torque available for a certain speed level. In the proposed Master–Slave configuration, the ECUs determine the desired engine speed according to the speed reference sent by the HCU. However, depending on the actual engine percentage load the amount of torque provided with the electric system is constantly weighted to maximize the engine usage and to track the speed reference set-point. To actually meet these requirements, the electric motor controller implemented on the HCU consisted of the two parallel branches shown in Figure 6. The top branch is a traditional PID controller which determines the ideal torque command for the electric motor given the engine speed set point (accelerator pedal signal) and the feedback measurement of the actual engine rpm. The lower branch is the real load observer section. According to the actual engine rpm and estimated torque, the percentage load is derived. This value is used as input of a polynomial function to determine the weighting factor of the electric motor torque command. Different polynomial functions determines different behavior of the electric system. To low order polynomial functions corresponds a higher use of the electric power. This characteristic can be used to allow the driver to choose between different power settings according to the current working task.
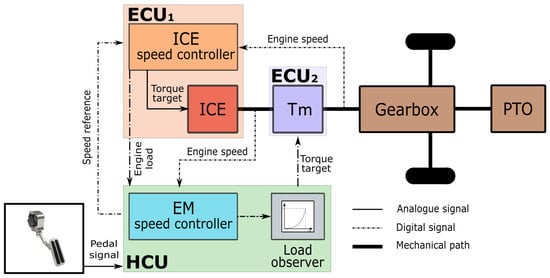
Figure 5.
Master–Slave control strategy with load observer for the parallel hybrid electric orchard tractor.
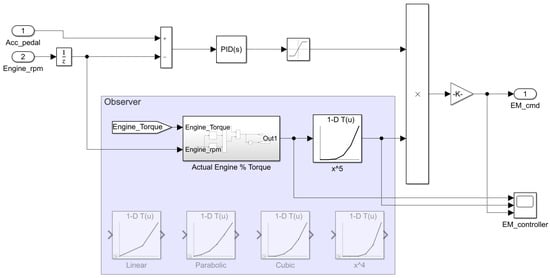
Figure 6.
Motor controller with the load observer strategy.
4. Hardware in the Loop Bench Setup
The Hardware in the Loop (HIL) system proposed in this work was designed for two main reasons: to study the feasibility of a parallel hybrid electric architecture for an orchard tractor in terms of electro-mechanical layout; to test performance of the Master–Slave control architecture with the load observer energy management strategy described in previous sections. The HIL system was configured to replicate a scaled version of the powertrain components. This means that small electric machines were considered for the application on the HIL bench but the torque and power characteristics were configured via software to obtain the same relative performance of the traditional and the suggested hybrid electric architecture. For the purpose of this study, there was no real need to include a scaled inertia element (like a flywheel) on the driveline because of the relatively constant speed nature of PTO working tasks. However, it is worth to mention that, being in a feedback loop configuration, the effect of the inertia contribution could be implemented at simulation level in order to determine correctly the braking torque. The so configured system allowed to validate the control strategy involving both hardware and software which could be used on the real vehicle. Thus, the HCU controller would experience the same feedbacks of a real electric powertrain. In the following sections the HIL bench will be described in its hardware and control parts.
4.1. Electro-Mechanical Layout
The HIL system designed for this activity aimed to replicate the powertrain layout and components that would be involved in a parallel hybrid electric orchard tractor. As shown in Figure 7a, the HIL bench consisted of three electric machines: two electric motors aimed to replicate the behavior of the diesel engine (ICE) and of the Traction motor (Tm) coupled on the same mechanical shaft and an electric brake for the applied load. Between the two motors, an electromagnetic clutch was considered to allow possible full electric operations, decoupling the Traction motor and the driveline from the ICE. The use of the electromagnetic clutch and the transitioning between hybrid and full electric operations would be analyzed in future works. For the purpose of this work, the clutch was always considered engaged. The electric system was powered by a lithium-ion battery pack with a nominal voltage of the DC Bus of 40 V. It is worth to mention that the system was configured in order to recover the braking energy. Thus, the actual energetic contribution of the pack was related to the difference between the motors and brake electro-mechanical energy conversion efficiency and to compensate for transient operations. This layout allowed to have a bench able to run for long testing sessions autonomously and without the need for grid connections. Moreover, the low voltage requirements was mandatory for safe testing conditions in the lab. Table 4 shows the characteristics of the electric machines used for a scaled version of the final architecture. It is worth to note that the electric motors used to simulate both the engine and the Traction motor were not powered at their full potential in order to be compatible with the braking capabilities of the electric brake. The two electric motors were equivalent in terms of nominal capacity. However, the custom controllers discussed in the following sessions allowed to effectively replicate the average behavior of both the ICE and Traction motor managing the relative amount of power to be provided. In Figure 7b, the actual bench in the HIL configuration is shown.
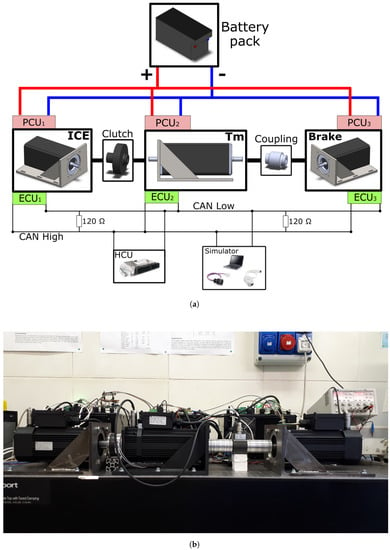
Figure 7.
(a) Hardware-In-the-Loop bench layout, (b) test bench.
Table 4.
Electric motor characteristics.
4.2. Control Architecture
As shown in Figure 7a, the HIL bench was intrinsically developed with a layered control structure as for a real vehicle architecture. The first and lower levels were managed by the power control units (PCUs) in charge of controlling the power converters to provide power to the electric machines. Then, several electronic control units (ECUs), like the one shown in Figure 8, were developed for the specific application to properly manage each electric subsystem. The ECU simulating the engine controller was in charge of providing the correct torque signals to replicate the speed controller behavior of the real diesel engine under different loading conditions. As shown in Figure 9, the behavior of the speed controller was compared against several levels of applied load to verify if the configuration designed for the heaviest condition (full load) was stable enough in case of light load (for example the idle condition during still operations). The ECU dedicated for the simulation of the Traction motor was in charge of converting the digital torque reference into an analogue signal for the corresponding PCU. The actuation commands were designed to be sent on the CAN BUS network by the hybrid control unit (HCU) and by the personal computer in charge of the tractor behavior simulation. The HCU was programmed to send proper actuation commands over the network every 10 ms. These consisted of:
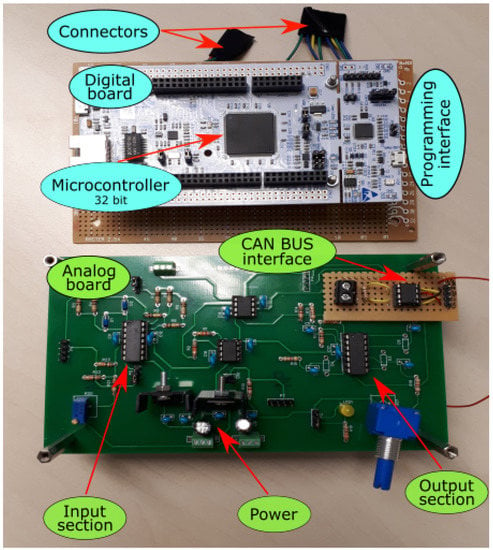
Figure 8.
Custom engine control unit (ECU) architecture.
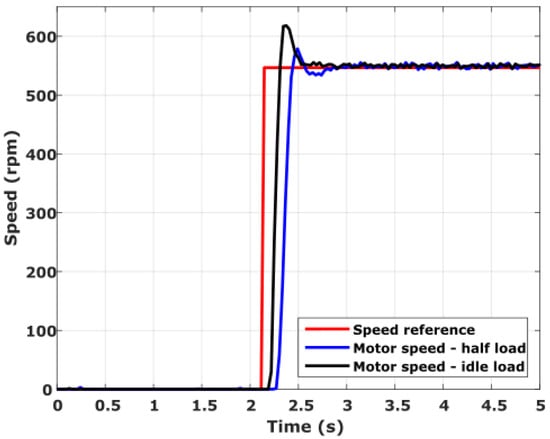
Figure 9.
Response of the internal combustion engine (ICE) ECU simulator—speed controller.
- The reference speed for the ICE simulator derived from a simulated pedal signal replicating the driver behavior during field measurements.
- The reference torque for the Tm simulator organized a percentage value of its nominal torque at a given rotational speed.
The same principle was applied to the tractor simulator. Reading the feedback signals over the CAN BUS regarding speed and actual percentage load of the two electric motors, a numerical model running on the personal computer (the simulator in Figure 7a) was able to determine the amount of torque to apply through the electric brake according to the desired mission profile (the PTO tests in this case). As for the electric motors, the brake was actuated through a percentage value of the nominal torque sent over the same CAN BUS network by the personal computer and its CAN BUS interface. The choice of this communication protocol was mainly related to the need of replicating as much as possible the architectural characteristics of a possible industrial machine.
5. Tests and Results
The HIL testing activity proposed in this work focused on replicating a scaled version of a parallel hybrid electric orchard tractor to test feasibility of the electro-mechanical solution and performance of the energy management strategy. The analysis focused on working scenarios derived from field observations of a real daily tractor use where three different implement were considered: a shredding tool, a rotary harrow and an atomizer whose characteristics were already discussed in previous chapters. However, these tasks represent three different power demand profiles to which the power unit should be able to withstand. Thus, they were considered a good testing scenario for the energy management strategy. In the following sections, the author will refer to the orchard tractor with the 75 kW diesel engine as the traditional tractor architecture and to the parallel hybrid electric solution as hybrid architecture.
5.1. Preliminary Setup
The hybrid architecture was designed to at least achieve comparable performance with the traditional diesel tractor but using a smaller ICE engine coupled in parallel to an electric Traction motor. To provide a common loading scenario on the HIL simulator, the system was initially configured to replicate the behavior of the traditional tractor architecture. Disengaging the clutch, the mechanical layout connected one motor (now simulating the 75 kW diesel engine) with the electric break. Experimental data were used to set the software simulation in charge of controlling the electric brake to simulate the desired working task. Data were collected from a 75 kW power unit, thus the brake needed to be controlled to load one single electric motor as the measured task power demand loaded the traditional diesel engine. As shown in Figure 10, the bench motor was loaded with an equivalent braking torque to replicate the percentage engine load of the real system. The input of the system was the driver signal pedal as representative of the desired working speed of the operator (directly related to the engine speed for a certain configuration of engaged gears). This signal was synchronized with the load data from the engine as both were read from the same Tractor ECU. The vehicle simulator was in charge of continuously monitoring the electric motor actual percentage load adjusting the braking torque to meet the load characteristics of the measured working task. For the purpose of this study, the amount of effective torque to be applied was not relevant because of the scaled nature of the bench itself and because the load observer strategy focuses the attention on a normalized parameter of the actual engine load. In addition, differences in terms of speed range between the real diesel engines and the motors on the bench are not relevant. Thanks to Equation (2), it is easy to linearly convert the engine reference speed set by the driver (ndiesel) and registered during field into a speed reference (Speedref,ICE) compatible with the bench ICE simulator characteristics.
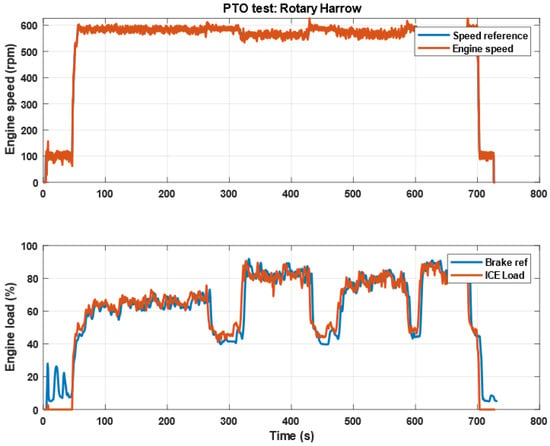
Figure 10.
Rotary harrow simulation diesel 75 kW (equivalent).
The idle speed was simulated as well at 100 rpm on the electric motor: an excessive drop in the motor speed would have automatically shut down the motor itself. This preliminary activity was repeated for the three different working tasks to prepare the common loading scenario between the diesel tractor simulator and the hybrid tractor simulator.
To simulate and test the hybrid architecture, the motors control settings were changed accordingly. The electric motor in charge of the engine simulation was configured to provide 75% of the nominal scaled torque used in the previous configuration for the diesel simulator motor to setup the electric brake (previously described). The electric motor in charge of the Traction motor simulation was configured to provide 40% of the same torque. In this way, the same motors were used to replicate the behavior of two different architectural configurations given the flexibility of the HIL simulator layout. Of course, during HIL simulations of the hybrid architecture, the clutch was engaged to connect the ICE simulator to the Traction motor. Finally, it is worth to mention that the brake configuration was not changed between simulations of the traditional and hybrid architecture to be sure that the same mission profile and load had been given to both the power units. Otherwise, no useful comparison could be performed between the two cases.
5.2. HIL Simulation of the Hybrid Architecture
For the proposed set of experimental tests the implemented load observer strategy was configured with a quadratic weighting function to manage the electric boost of the Traction motor. All three tests with the hybrid configuration of the HIL bench used the driver pedal signal as input of the HCU and shared the same braking strategy of the corresponding simulation representative of the traditional diesel powered tractor architecture to prove the compliance in terms of power capabilities. Results of the first test regarding the use of an atomizer are shown in Figure 11. This loading scenario is representative of a medium-high power demand with very low variability with respect of the average value. During this test, the system was able to satisfy the power demand of the proposed task with a very stable behavior. As demonstrated by the speed record, the driver speed set point and the actual motor’s speed are in good agreement; thus, the Slave branch of the control architecture well followed the ICE simulator speed. Moreover, the torque contribution of the Traction motor simulator was approximately 25% of its nominal capacity. This means that the load observer managed well the power split between the two power sources in favor of the ICE use which was involved for almost 75% of its nominal capacity. A higher contribution of the ICE could be achieved using a different weighting function. However, continuous operations above 80% of the nominal capacity should be well investigated. This condition could preserve the on board electric energy, but could shorten the ICE life if the engine is not designed for continuous high power output. From the energetic point, working as close as possible to the nominal power is the most efficient condition. However, the engine should be mechanically compliant to such type of operating condition.
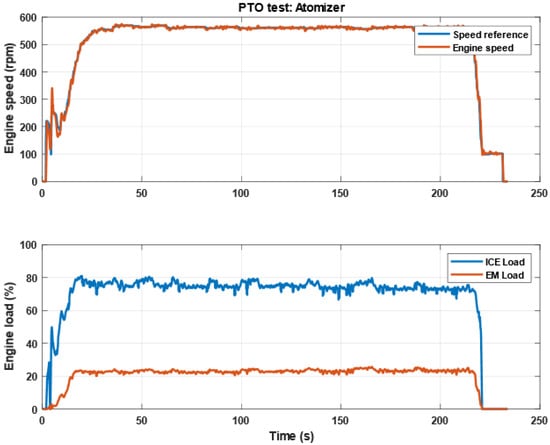
Figure 11.
HIL—atomizer test hybrid tractor.
Figure 12 better shows the influence of the load observer strategy. Shredding activities are usually characterized by a medium-low power demand, with peaks in case of grass with different textures which may require higher cutting power. Working speeds are generally low and constant to optimize the cutting performance of the implement. Thus, the amount of power required to propel the vehicle is not so critical. Results show the energy split between the two power sources. The ICE simulator was involved in average for the 60% of its nominal capabilities while the Traction motor simulator for the 16%. These results show an interesting scenario. During these testing activities, a common weighting function for the load observer was used to have a performance baseline between the three different HIL simulations. However, it is clear that in case of vehicle implementation some sort of performance options should be available to the operator. Depending on the amount of electric energy stored on board, it is not useful to have the intervention of the electric system if the ICE still has power reservoir to accomplish the task. In this case, the ICE should be more involved to preserve the electric system for more intense tasks. In general, tasks like shredding often require a fraction of the installed ICE power. This is the reason why smaller ICE in hybrid configuration can represent a feasible alternative.
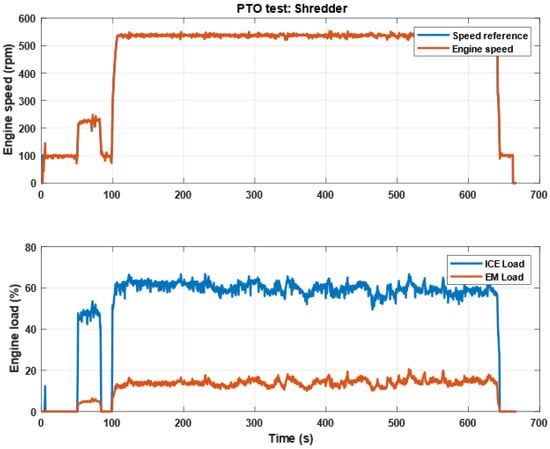
Figure 12.
HIL—shredding test hybrid tractor.
Finally, Figure 13 shows the HIL simulation of the harrowing test. This was the most demanding working scenario among the ones considered in this study. The hybrid configuration was able to meet the power requirement given the working speed and the applied load. In this case the ICE simulator was pushed closer to its limit, with peaks around 85% of the torque reservoir. Due to the higher power demand, also the electric system was more involved, almost 35% with respect of its capabilities. Two considerations can be made out of these results. The first is that although the ICE engine is smaller, the proposed hybrid configuration has higher power capabilities; thus, more demanding tasks and scenarios can be overcome with respect to a traditional powertrain. The second is that more weighting functions must be considered to better optimize the overall performance of the hybrid system. In this case, tractors usually encounter soil blocks with different characteristics especially in terms of humidity which makes them harder to approach. A more aggressive weighting function could compensate with the faster response of the electric system which could also optimize the ICE working condition and the overall tractor performance. However, it is worth to mention that boost capabilities should be always compliant with the amount of on board energy storage which must be carefully designed to not prevent the user to finish its dailies tasks.
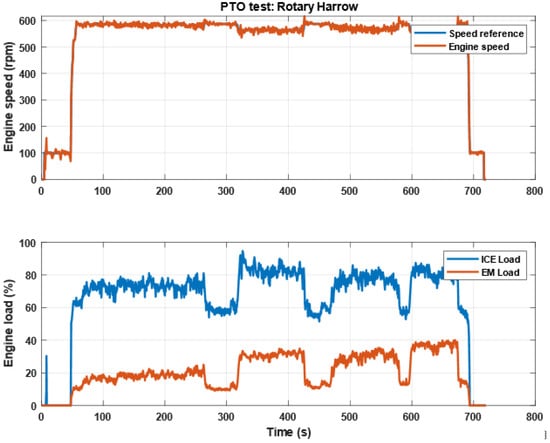
Figure 13.
HIL—harrowing test hybrid tractor.
Looking at the results obtained in all the simulations summarized in Figure 14, the nominal size of the electric motor could be considered overestimated. Smaller electric traction motors with less than 20 kW nominal power could be considered for the hybrid configuration. However, the size investigated in this work was chosen to allow for full electric light operations which are very common in traditional farms. The adoption of a clutch between the Traction motor and the ICE could disengage the latter to allow operations in low emission zones like closed environment. Moreover, full electric operations could improve the overall quality of the products which would be not involved by the harmful pollutants of the tractor exhaust gases.
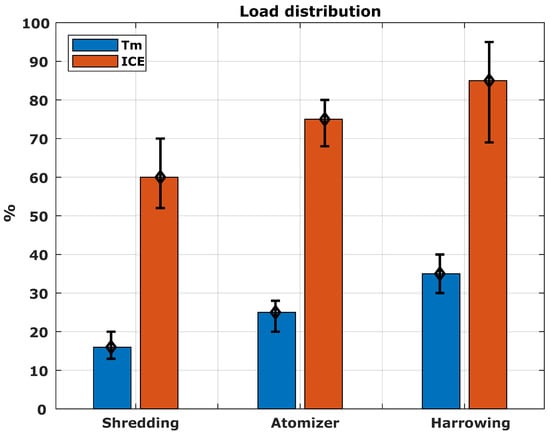
Figure 14.
Load distribution due to the load observer strategy.
6. Conclusions
The rise of hybrid and electric powertrains increased the need for advanced design and testing methodologies. A Model-Based Design approach where Hardware in the Loop benches represent at the same time design and testing tools to verify and validate control strategies as well as architectural solutions, well fit the need for high level tools to be used for electrification activities. In this work, the HIL approach was proposed to replicate a hybrid electric architecture of an orchard tractor. The architectural solution was designed as a consequence of an extensive experimental activity where a traditional diesel powered tractor was monitored during its daily activities. This was a necessary step because standard testing procedures and working scenarios are rarely available when it comes to NRMM machines. The proposed HIL configuration replicated the designed hybrid tractor at powertrain level, considering electric machines simulating both the ICE and the Traction motor of the vehicle depending on the control configuration loaded into specifically designed control boards. A third electric machine was used to apply a braking torque determined by the simulation subsystem which adapted the load according to the driver pedal signal (derived from experimental measurement) and the power demand profile the power unit should be able to satisfy to perform at least as the traditional tractor. For this work, three tasks were considered as case studies due to their power characteristics. The main goal of the HIL tests was to understand performance of the load observer energy management strategy. This control architecture where the Traction motor is in a Slave configuration with respect to the ICE has the goal to minimize as much as possible the amount of electric power required. This may seem counter-intuitive but is necessary when the architecture is considered as part of a working machine. Orchard tractors are very small and narrow machines, thus the available on board space for electric storage would be very limited. If the energy management strategy is properly configured, for most of the common tasks a system with a smaller ICE could still perform as well as the traditional vehicles. However, for those tasks where power capabilities may be required, the electric system should be ready to boost the powertrain. Results shown demonstrate that for common tasks the ICE of the hybrid unit could be capable to perform with very low use of the electric system. Moreover, if the driver is able to choose among different power configurations, performance for given working tasks can be further improved. More aggressive weighting function can be used for the most demanding tasks as shown by the harrowing test. However, these configurations should be carefully addressed according to the actual on board energy storage capabilities. This work shows that orchard tractor electrification can be considered as a viable option for improvements in agriculture. Still this field needs attention from the academic and industrial community to make agriculture electrification a reality.
Funding
This research received no external funding.
Conflicts of Interest
The author declares no conflict of interest.
References
- Kim, H.; Wi, J.; Yoo, J.; Son, H.; Park, C.; Kim, H. A Study on the Fuel Economy Potential of Parallel and Power Split Type Hybrid Electric Vehicles. Energies 2018, 11, 2103. [Google Scholar] [CrossRef]
- Babu, A.; Ashok, S. Energy and fuel efficient parallel mild hybrids for urban roads. Energy Convers. Manag. 2016, 121, 305–320. [Google Scholar] [CrossRef]
- Ferrero, E.; Alessandrini, S.; Balanzino, A. Impact of the electric vehicles on the air pollution from a highway. Appl. Energy 2016, 169, 450–459. [Google Scholar] [CrossRef]
- Cubito, C.; Millo, F.; Boccardo, G.; Di Pierro, G.; Ciuffo, B.; Fontaras, G.; Serra, S.; Otura Garcia, M.; Trentadue, G. Impact of Different Driving Cycles and Operating Conditions on CO2 Emissions and Energy Management Strategies of a Euro-6 Hybrid Electric Vehicle. Energies 2017, 10, 1590. [Google Scholar] [CrossRef]
- Zheng, X.; Wu, Y.; Zhang, S.; Baldauf, R.W.; Zhang, K.M.; Hu, J.; Li, Z.; Fu, L.; Hao, J. Joint measurements of black carbon and particle mass for heavy-duty diesel vehicles using a portable emission measurement system. Atmos. Environ. 2016, 141, 435–442. [Google Scholar] [CrossRef]
- Krishnamurthy, M.; Carder, D.K.; Thompson, G.; Gautam, M. Cost of lower NOx emissions: Increased CO2 emissions from heavy-duty diesel engines. Atmos. Environ. 2007, 41, 666–675. [Google Scholar] [CrossRef]
- Grigoratos, T.; Fontaras, G.; Giechaskiel, B.; Zacharof, N. Real world emissions performance of heavy-duty Euro VI diesel vehicles. Atmos. Environ. 2019, 201, 348–359. [Google Scholar] [CrossRef]
- European Parliament—Council of the European Union. Regulation (EU) 2016/1628. 2016. [Google Scholar]
- European Parliament—Council of the European Union. Directive 97/68/EC. 1997. [Google Scholar]
- Xin, Q.; Xin, Q. Diesel aftertreatment integration and matching. Diesel Engine Syst. Des. 2013, 503–525. [Google Scholar] [CrossRef]
- Somà, A.; Bruzzese, F.; Mocera, F.; Viglietti, E. Hybridization Factor and Performance of Hybrid Electric Telehandler Vehicle. IEEE Trans. Ind. Appl. 2016, 52, 5130–5138. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Y.; Yin, C.; Zhang, H.; Wang, C. Hardware-in-the-loop simulation for the design and verification of the control system of a series–parallel hybrid electric city-bus. Simul. Model. Pract. Theory 2012, 25, 148–162. [Google Scholar] [CrossRef]
- Banjac, T.; Trenc, F.; Katrašnik, T. Energy conversion efficiency of hybrid electric heavy-duty vehicles operating according to diverse drive cycles. Energy Convers. Manag. 2009, 50, 2865–2878. [Google Scholar] [CrossRef]
- Finesso, R.; Spessa, E.; Venditti, M. Layout design and energetic analysis of a complex diesel parallel hybrid electric vehicle. Appl. Energy 2014, 134, 573–588. [Google Scholar] [CrossRef]
- Lajunen, A.; Sainio, P.; Laurila, L.; Pippuri-Mäkeläinen, J.; Tammi, K. Overview of Powertrain Electrification and Future Scenarios for Non-Road Mobile Machinery. Energies 2018, 11, 1184. [Google Scholar] [CrossRef]
- Schmuch, R.; Wagner, R.; Hörpel, G.; Placke, T.; Winter, M. Performance and cost of materials for lithium-based rechargeable automotive batteries. Nat. Energy 2018, 3, 267–278. [Google Scholar] [CrossRef]
- Mocera, F.; Vergori, E.; Soma, A. Battery Performance Analysis for Working Vehicle Applications. IEEE Trans. Ind. Appl. 2020, 56, 644–653. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Working Cycle requirements for an electrified architecture of a vertical feed mixer vehicle. Procedia Struct. Integr. 2018, 12, 213–223. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Peng, Y.; Zhang, Y.; Wang, J. Research on energy saving control strategy of parallel hybrid loader. Autom. Constr. 2014, 38, 100–108. [Google Scholar] [CrossRef]
- Borthakur, S.; Subramanian, S.C. Optimized Design and Analysis of a Series-Parallel Hybrid Electric Vehicle Powertrain for a Heavy Duty Truck. IFAC-PapersOnLine 2018, 51, 184–189. [Google Scholar] [CrossRef]
- Wang, D.; Guan, C.; Pan, S.; Zhang, M.; Lin, X. Performance analysis of hydraulic excavator powertrain hybridization. Autom. Constr. 2009, 18, 249–257. [Google Scholar] [CrossRef]
- Chen, Q.; Lin, T.; Ren, H. Parameters optimization and control strategy of power train systems in hybrid hydraulic excavators. Mechatronics 2018, 56, 16–25. [Google Scholar] [CrossRef]
- Dinh, T.; Marco, J.; Niu, H.; Greenwood, D.; Harper, L.; Corrochano, D. A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part B: A Real-Time Comparative Study. Energies 2017, 10, 1250. [Google Scholar] [CrossRef]
- Kim, H.; Yoo, S.; Cho, S.; Yi, K. Hybrid control algorithm for fuel consumption of a compound hybrid excavator. Autom. Constr. 2016, 68, 1–10. [Google Scholar] [CrossRef]
- Petersen, L.; Iov, F.; Tarnowski, G.C. A Model-Based Design Approach for Stability Assessment, Control Tuning and Verification in Off-Grid Hybrid Power Plants. Energies 2019, 13, 49. [Google Scholar] [CrossRef]
- Mocera, F.; Soma, A. Study of a Hardware-In-the-Loop bench for hybrid electric working vehicles simulation. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11–13 April 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Moore, J.D.; Molen, G.M. SIL, HIL, and Vehicle Fuel Economy Analysis of a Pre-Transmission Parallel PHEV. World Electr. Veh. J. 2013, 6, 445–451. [Google Scholar] [CrossRef]
- Gao, H.; Zhang, T.; Chen, H.; Zhao, Z.; Song, K. Application of the X-in-the-Loop Testing Method in the FCV Hybrid Degree Test. Energies 2018, 11, 433. [Google Scholar] [CrossRef]
- Mayet, C.; Delarue, P.; Bouscayrol, A.; Chattot, E. Hardware-In-the-Loop Simulation of Traction Power Supply for Power Flows Analysis of Multitrain Subway Lines. IEEE Trans. Veh. Technol. 2017, 66, 5564–5571. [Google Scholar] [CrossRef]
- Castaings, A.; Lhomme, W.; Trigui, R.; Bouscayrol, A. Comparison of energy management strategies of a battery/supercapacitors system for electric vehicle under real-time constraints. Appl. Energy 2016, 163, 190–200. [Google Scholar] [CrossRef]
- Nibert, J.; Herniter, M.; Chambers, Z. Model-Based System Design for MIL, SIL, and HIL. World Electr. Veh. J. 2012, 5, 1121–1130. [Google Scholar] [CrossRef]
- Allegre, A.L.; Bouscayrol, A.; Verhille, J.N.; Delarue, P.; Chattot, E.; El-Fassi, S. Reduced-Scale-Power Hardware-in-the-Loop Simulation of an Innovative Subway. IEEE Trans. Ind. Electron. 2010, 57, 1175–1185. [Google Scholar] [CrossRef]
- Bouscayrol, A. Different types of Hardware-In-the-Loop simulation for electric drives. In Proceedings of the 2008 IEEE International Symposium on Industrial Electronics, Cambridge, UK, 30 June–2 July 2008; pp. 2146–2151. [Google Scholar] [CrossRef]
- Bouscayrol, A.; Guillaud, X.; Delarue, P.; Lemaire-Semail, B. Energetic Macroscopic Representation and Inversion-Based Control Illustrated on a Wind-Energy-Conversion System Using Hardware-in-the-Loop Simulation. IEEE Trans. Ind. Electron. 2009, 56, 4826–4835. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Analysis of a Parallel Hybrid Electric Tractor for Agricultural Applications. Energies 2020, 13, 3055. [Google Scholar] [CrossRef]
- Moreda, G.; Muñoz-García, M.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Stoss, K.J.; Sobotzik, J.; Shi, B.; Kreis, E.R. Tractor Power for Implement Operation—Mechanical, Hydraulic, and Electrical: An Overview. In Proceedings of the Agricultural Equipment Technology Conference, Kansas City, MO, USA, 28–30 January 2013; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2013; pp. 1–25. [Google Scholar]
- Troncon, D.; Alberti, L.; Mattetti, M. A Feasibility Study for Agriculture Tractors Electrification: Duty Cycles Simulation and Consumption Comparison. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Caban, J.; Vrabel, J.; Šarkan, B.; Zarajczyk, J.; Marczuk, A. Analysis of the market of electric tractors in agricultural production. MATEC Web Conf. 2018, 244, 03005. [Google Scholar] [CrossRef]
- KannusamyMY, L.; Ravindran, V.; Rao, N. Analysis of Multiple Hybrid Electric Concept in Agricultural Tractor through Simulation Technique; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Jiang, Y.; Yang, J.; Cocker, D.; Karavalakis, G.; Johnson, K.C.; Durbin, T.D. Characterizing emission rates of regulated pollutants from model year 2012 + heavy-duty diesel vehicles equipped with DPF and SCR systems. Sci. Total Environ. 2018, 619–620, 765–771. [Google Scholar] [CrossRef] [PubMed]
- Briggs, I.; Murtagh, M.; Kee, R.; McCulloug, G.; Douglas, R. Sustainable non-automotive vehicles: The simulation challenges. Renew. Sustain. Energy Rev. 2017, 68, 840–851. [Google Scholar] [CrossRef]
- Voss, W. A Comprehensible Guide to Controller Area Network; Copperhill Technologies Corporation: Greenfield, IN, USA, 2005. [Google Scholar]
- Voss, W. A Comprehensible Guide to J1939; Copperhill Technologies Corporation: Greenfield, IN, USA, 2008. [Google Scholar]
- Xiong, R.; Li, L.; Tian, J. Towards a smarter battery management system: A critical review on battery state of health monitoring methods. J. Power Sources 2018, 405, 18–29. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).