Closed-Form Solution of a Special Case of a Vehicle Longitudinal Motion Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
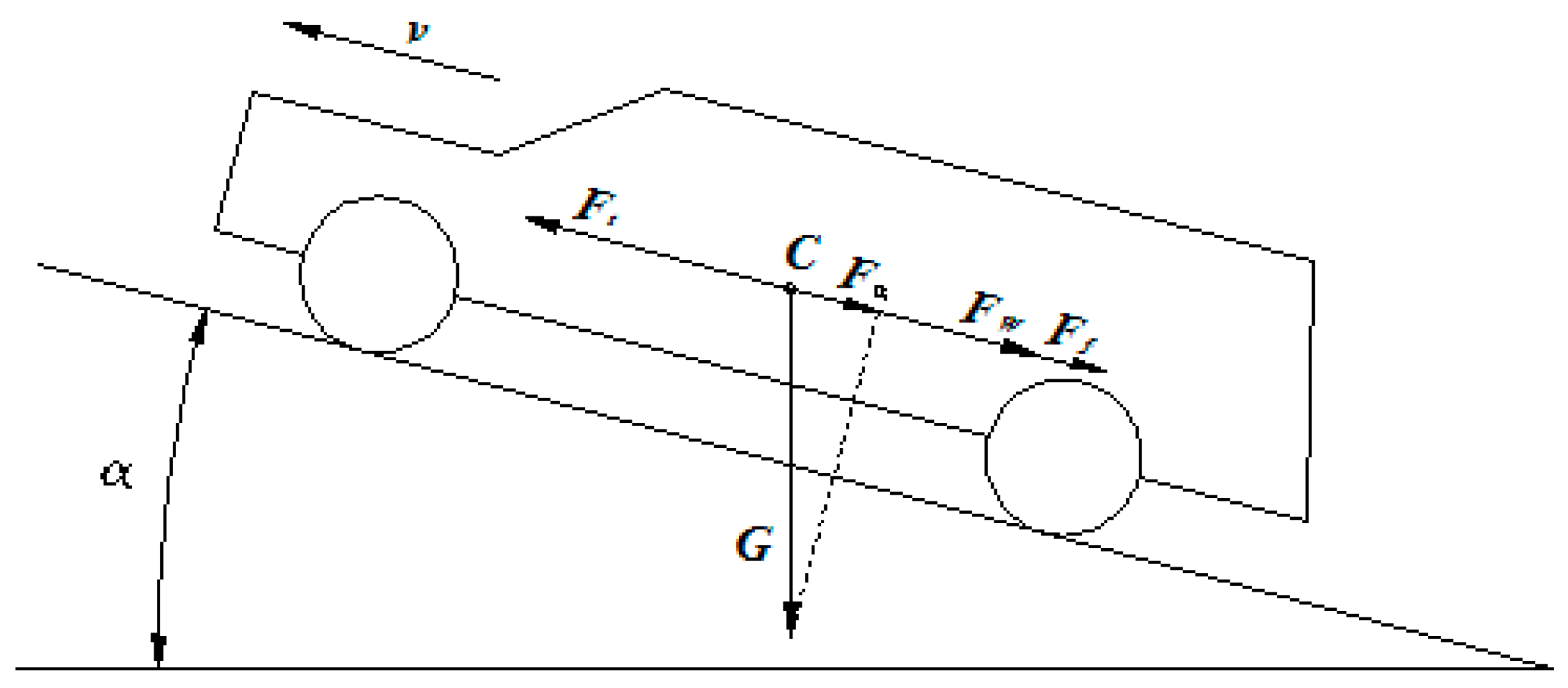
2. Model Description
- Total traction force Ft;
- Total rolling resistance Ff;
- Climbing resistance Fα;
- Air drag resistance FW.
- Vehicle is considered a rigid body, with one degree of freedom. The only coordinate required to identify its position is distance travelled (s);
- Vehicle moves through still air, in a straight line, on an even road surface with a constant gradient;
- For simplicity, and because of linear motion, all vectors are treated as scalars. Forces are positive if they act in the same direction as the vehicle velocity. If they act in the opposite direction, their values are negative. The same applies to acceleration;
- Total traction force Ft, total rolling resistance Ff, and climbing resistance Fα are all constant forces, whereas air drag resistance FW is a function of the vehicle speed.
3. Model Solution
3.1. Case When K2 > 0
3.1.1. Case When v > K3
3.1.2. Case When v < K3
3.2. Case When K2 < 0
4. Analysis of the Results
4.1. Case When K2 > 0
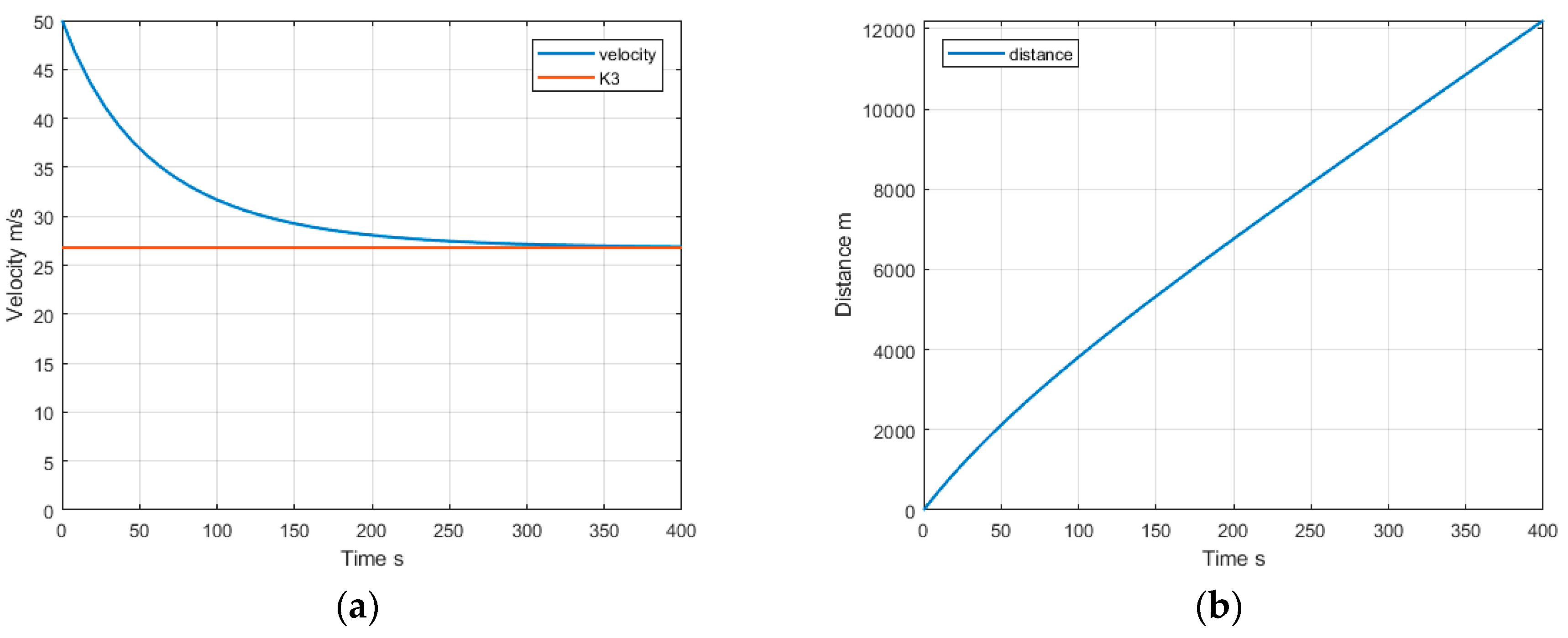
4.1.1. Case When v > K3
- If the sum of three forces (K2 = Ff + Fα + Ft) is positive but the vehicle decelerates, the absolute value of air resistance FW, which is greater than the sum according to (35), will also decrease;
- At some point, the absolute value of FW will become equal to the sum of the other three forces, when deceleration stops and velocity reaches a constant value;
- It takes infinite time to reach this point.
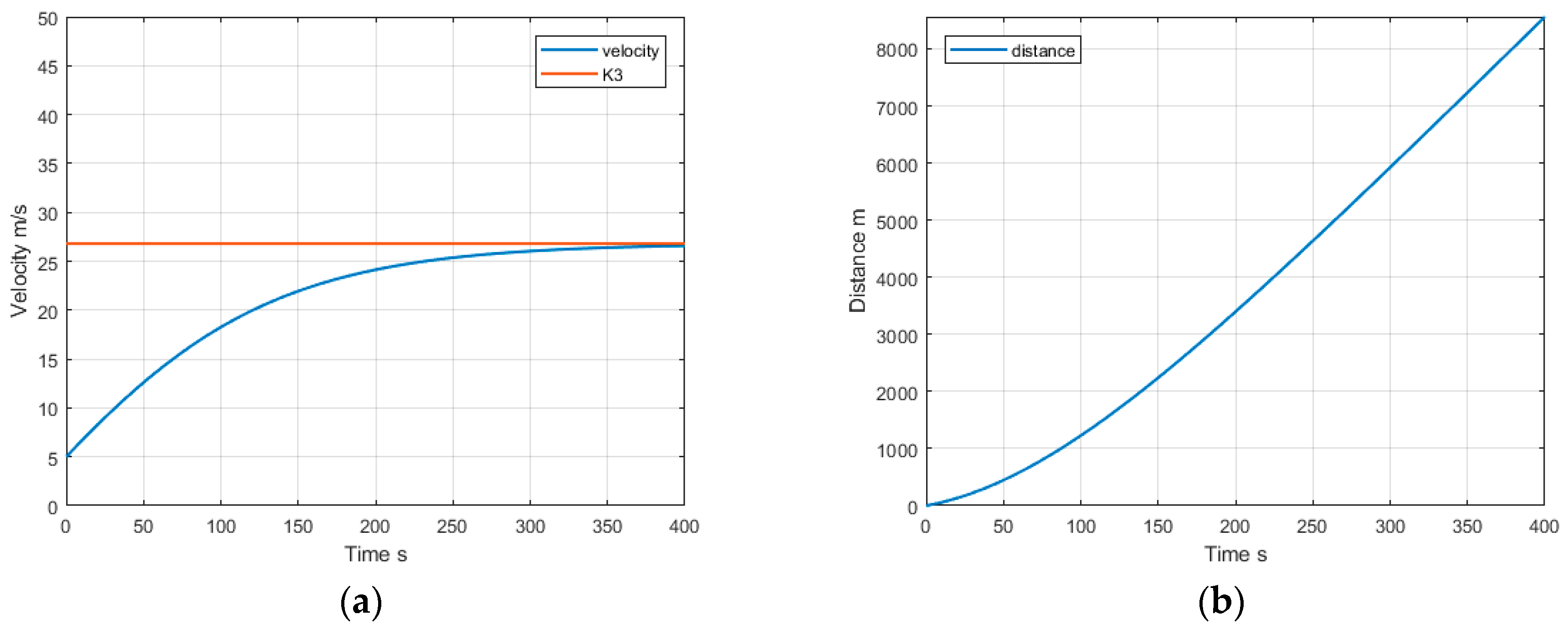
4.1.2. Case When v < K3
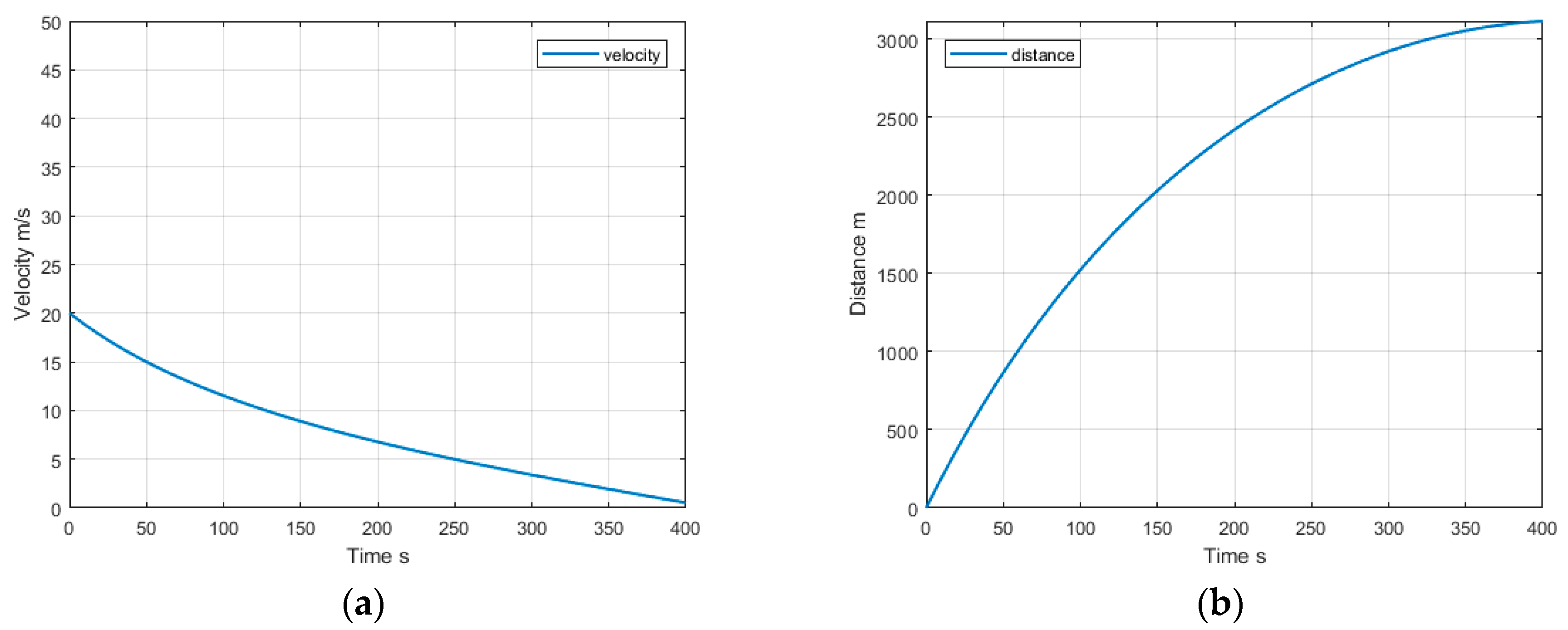
4.2. Case When K2 < 0
5. Conclusions
- It derives a new set of equations that represent the exact solution (closed-form solution) of the mathematical model, describing a special case of vehicle longitudinal motion;
- It analyses the equations and reveals how relations between the four acting forces and initial velocity determine the nature of the longitudinal motion.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| m | equivalent vehicle mass, which includes rotational masses. |
| v | vehicle velocity. |
| s | distance travelled. |
| t | time parameter. |
| g | gravitational acceleration. |
| Cw | vehicle aerodynamic coefficient. |
| A | frontal projection area of the vehicle. |
| ρ | air density. |
| f | coefficient of rolling resistance. |
| Fα | climbing resistance. |
| FW | air drag resistance. |
| Ft | total traction force (from all wheels). |
| Ff | total rolling resistance (from all wheels). |
| α | road gradient angle. |
| Ki | introduced constants to simplify expressions (i = 1–5). |
| Ci | constants of integration (i = 1–6). |
| ABS | anti–lock brake system. |
Appendix A. Vehicle Details
| m = 1500 | equivalent vehicle mass, including rotational masses (kg). |
| f = 0.02 | coefficient of rolling resistance. |
| g = 9.81 | gravitational acceleration (m/s2). |
| Cw = 0.3 | vehicle aerodynamic coefficient. |
| α = 0.01 | road gradient angle (rad). |
| A = 2 | frontal projection area of the vehicle (m2). |
| ρ = 1.2 | air density (kg/m3). |
| Ft = 700 or 400 | total traction force (from all wheels) (N). |
| s1 = 0 | initial distance travelled (m). |
| v1 = 50 or 5 | initial velocity (m/s). |
References
- White, R.A.; Korst, H.H. The Determination of Vehicle Drag Contributions from Coast down Tests. SAE Trans. 1972, 81, 354–359. [Google Scholar] [CrossRef]
- Roussillon, G. Contribution to accurate measurement of aerodynamic drag on a moving vehicle from coast–down tests and determination of actual rolling resistance. J. Wind Eng. Ind. Aerodyn. 1981, 9, 33–48. [Google Scholar] [CrossRef]
- Vantsevich, V.V. Road and off-road vehicle system dynamics. Understanding the future from the past. Veh. Syst. Dyn. 2015, 53, 137–153. [Google Scholar] [CrossRef]
- Kutluay, E.; Winner, H. Validation of vehicle dynamics simulation models—A review. Veh. Syst. Dyn. 2014, 52, 186–200. [Google Scholar] [CrossRef]
- Arnold, M.; Burgermeister, B.; Führer, C.; Hippmann, G.; Rill, G. Numerical methods in vehicle system dynamics: State of the art and current developments. Veh. Syst. Dyn. 2011, 49, 1159–1207. [Google Scholar] [CrossRef]
- Lugner, P.; Plochl, M. Modelling in vehicle dynamics of automobiles. J. Appl. Math. Mech. 2004, 84, 219–236. [Google Scholar] [CrossRef]
- Majdoub, K.E.; Giri, F.; Ouadi, H.; Dugard, L.; Chaoui, F.Z. Vehicle longitudinal motion modelling for nonlinear control. Contr. Eng. Pract. 2011, 20, 69–81. [Google Scholar] [CrossRef][Green Version]
- Chen, K.; Pei, X.; Ma, G.; Guo, X. Longitudinal/Lateral Stability Analysis of Vehicle Motion in the Nonlinear Region. Math. Prob. Eng. 2016, 2016, 3419108. [Google Scholar] [CrossRef]
- Blagojevic, M. A Research of Possibilities of Realising of Motor Vehicle Braking without Blocking the Wheels. Magistar Thesis, University of Banja Luka, Banja Luka, Bosnia and Herzegovina, 2004. [Google Scholar]
- Meywerk, M. Vehicle Dynamics; John Wiley & Sons Incorporated: New York, NY, USA, 2015. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science Business Media Inc.: New York, NY, USA, 2006. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blagojevic, M.; Djudurovic, M.; Bajic, B. Closed-Form Solution of a Special Case of a Vehicle Longitudinal Motion Model. Vehicles 2019, 1, 116-126. https://doi.org/10.3390/vehicles1010007
Blagojevic M, Djudurovic M, Bajic B. Closed-Form Solution of a Special Case of a Vehicle Longitudinal Motion Model. Vehicles. 2019; 1(1):116-126. https://doi.org/10.3390/vehicles1010007
Chicago/Turabian StyleBlagojevic, Miroslav, Milan Djudurovic, and Borislav Bajic. 2019. "Closed-Form Solution of a Special Case of a Vehicle Longitudinal Motion Model" Vehicles 1, no. 1: 116-126. https://doi.org/10.3390/vehicles1010007
APA StyleBlagojevic, M., Djudurovic, M., & Bajic, B. (2019). Closed-Form Solution of a Special Case of a Vehicle Longitudinal Motion Model. Vehicles, 1(1), 116-126. https://doi.org/10.3390/vehicles1010007