
Efficient State Synchronization in Distributed Electrical Grid Systems Using Conflict-Free Replicated Data Types

 , ,
, ,  , , and
, , and 
Abstract
:1. Introduction
2. Literature Overview
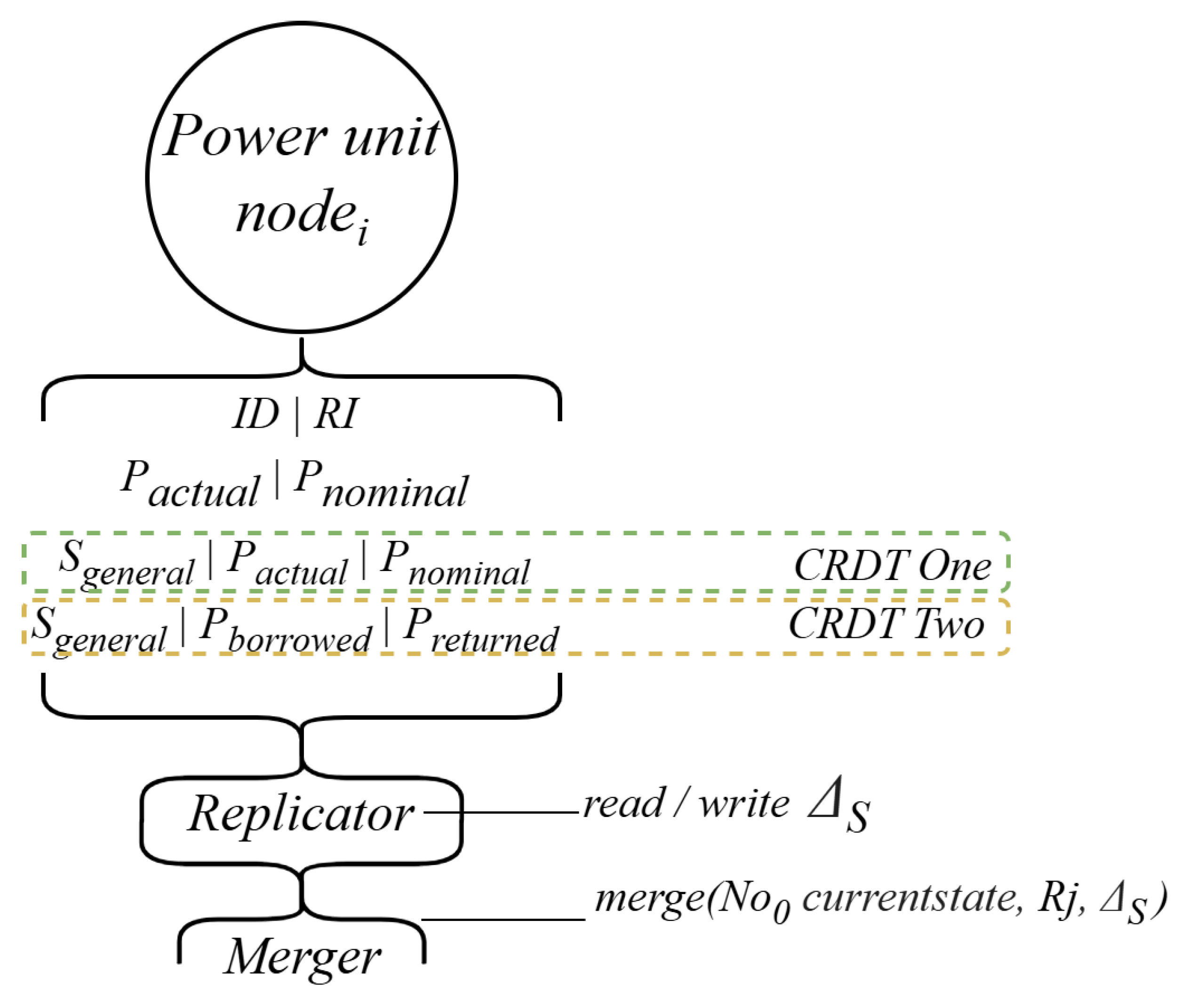
3. General Representation of the Distributed Electrical Grid’s States Using CRDTs
- Node availability: This state can indicate whether nodes in the network are available for data exchange. If a node fails or disconnects, this will affect the network’s state [33].
- Resource information: This state may include information about resources provided by the nodes.
- Network load: This state can indicate the overall load on the network. If many nodes are actively exchanging data, this may lead to network congestion.
- Connection stability: This state can reflect the stability of the connections between nodes. If connections are unstable or nodes frequently lose connectivity, this can impact the network performance.
- Continuous phenomena, meaning deviations from nominal values that occur continuously. These phenomena mainly result from load characteristics, load power variations, or the nonlinear nature of the load.
- Random voltage events, meaning sudden and significant deviations from the normal or desired voltage waveform. These are most likely due to unforeseen events (such as accidents) or external factors (such as weather conditions or actions by third parties).
- The data structures are designed to be commutative and convergent [44]. This means that multiple copies of the same data can be independently updated and then merged together without conflicts [45]. This allows for efficient and accurate data analysis, even in cases where the network is disconnected or has high traffic [46,47].
- The CRDT approach relies on predetermined conflict resolution rules, which dictate their semantics. These rules are typically data structure specific [45]. CRDTs provide a mechanism for detecting and resolving conflicts, ensuring consistency across all copies of the data. This is particularly useful in the electrical grid, where multiple copies of state information can be stored in different locations.
- By choosing a state-based CRDT structure [44], which stores the current state of the data rather than the history of changes, they are suitable for real-time monitoring and analysis of data in the electrical grid.
- Fault tolerance: CRDTs are fault-tolerant, as they allow data to be replicated between nodes and recovered in the event of a failure of one or more nodes [49].
- State-based CRDTs: Convergent Replicated Data Type (CvRDT) [54]—These CRDTs store a complete copy of the state on each network node, which is merged later. These CRDTs support state merge operations to avoid conflicts. A replica periodically propagates its local changes to other replicas by shipping its entire state. A received state is incorporated within the local state via a merge function that deterministically reconciles both states. To maintain convergence, a merge is defined as a join: at least an upper bound over a join semilattice [55]. A major drawback of state-based CRDTs is the communication overhead of shipping the entire state, which can become very large in size [56].
- Operation-based CRDTs: Commutative Replicated Data Type (CmRDT) [57]—These CRDTs store the operations that have been performed on each network node rather than a complete copy of the state. These CRDTs support the execution order of operations to ensure compatibility. The approach ensures that there are no conflicts and, hence, no need for consensus-based concurrency control [43]. CmRDTs have some advantages, as they can allow for simpler implementations, a concise replica state, and smaller messages; however, they are subject to some limitations. First, they assume a message dissemination layer that guarantees reliable exactly-once causal broadcast; these guarantees are hard to maintain, since large logs must be retained to prevent duplication, even if a TCP is used [58]. Second, membership management is a hard task in op-based systems, especially once the number of nodes becomes larger or due to churn problems, since all nodes must be coordinated by the middleware. Third, the op-based approach requires operations to be executed individually (even when batched) on all nodes [56].
- Idempotence: A CRDT consists of a set of all added elements and a set of all removed elements. If an attempt is made to or the same element again, the CRDT remains unmodified. This property avoids duplication and maintains the integrity of the data type, allowing the CRDT to behave consistently across distributed systems by supporting convergence and eventual consistency. Adding ( operation) or removing ( operation) an element from the CRDT can be described using Equation (2), where and are idempotent operations:
- Commutativity: Since the and operations do not depend on each other, the order in which they are executed does not affect the result. This property can be described using Equation (3) as follows:
- Associativity: The result of the operations does not depend on the order in which they are applied, regardless of how these operations are grouped. This property can be described based on Equation (4) as follows:
4. Modelling
- Natural Modelling of Asynchronous Processes: The actor model is ideal for asynchronous programming, where tasks run in parallel and independently. Actors communicate via messages without blocking, making it easy to create parallel processes without the need for thread synchronization.
- Improved Scalability: The actor model allows for the addition of new actors or the distribution of actors across nodes with minimal code changes. This makes it possible to scale applications both vertically (on a single server) and horizontally (across multiple servers or nodes).
- State Isolation: Each actor has its own state, which is not directly accessible to other actors. This eliminates the need for locks on shared states, reducing errors related to synchronization. Actors can update their state independently, making the system more robust.
- High Resilience and Self-Recovery: Actors have a built-in supervision system in which one actor can monitor another. If an actor fails, its supervisor can restart it or take other corrective actions, ensuring automatic recovery. This is crucial in distributed systems that need to maintain continuous operation.
- Simplification of Distributed Computing: Since actors communicate through messages, they can exist on different nodes of a distributed system. Actors can interact with each other both locally and over the network, simplifying the development of distributed systems where actors can exchange data regardless of physical location.
- High Performance via Asynchronous Processing: Since actors do not block threads when processing messages, the system can handle a large number of requests simultaneously. This allows for high performance even under heavy loads, as there is no downtime due to resource locking.
- Natural Management of Parallelism: In an actor system, each actor is an isolated unit of parallel computation. This makes it easy to distribute workloads across different CPU cores or even different machines without the complexity that is typically associated with multi-threading.
- Ease of Developing Complex Systems: The actor model is well suited for systems where objects have complex behaviours or interact frequently. Instead of creating complex locking and synchronization mechanisms, actors use messaging to manage their behaviour, simplifying code creation and maintenance.
5. Modelling Results
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Don Chua, W.F.; Lim, C.L.; Koh, Y.Y.; Kok, C.L. A Novel IoT Photovoltaic-Powered Water Irrigation Control and Monitoring System for Sustainable City Farming. Electronics 2024, 13, 676. [Google Scholar] [CrossRef]
- Tsao, Y.C.; Vu, T.L. Power supply chain network design problem for smart grid considering differential pricing and buy-back policies. Energy Econ. 2019, 81, 493–502. [Google Scholar] [CrossRef]
- Dkhili, N.; Eynard, J.; Thil, S.; Grieu, S. A survey of modelling and smart management tools for power grids with prolific distributed generation. Sustain. Energy Grids Netw. 2020, 21, 100284. [Google Scholar] [CrossRef]
- Shan, L.-Z.; Yamane, K.; Ono, T.; Kawamura, T.; Wu, W.C.; Hu, Z.C.; Wang, Q.; Wen, Y.L. Distributed Energy Resource Management System with improved convergence. Appl. Energy 2024, 371, 123566. [Google Scholar] [CrossRef]
- Monaco, R.; Bergaentzle, C.; Leiva Vilaplana, J.A.; Ackom, E.; Nielsen, P.S. Digitalization of power distribution grids: Barrier analysis, ranking and policy recommendations. Energy Policy 2024, 188, 114083. [Google Scholar] [CrossRef]
- Sapatnekar, S.S.; Su, H. Analysis and optimization of power grids. IEEE Des. Test Comput. 2003, 20, 7–15. [Google Scholar] [CrossRef]
- Liu, T.; Song, Y.; Zhu, L.; Hill, D.J. Stability and Control of Power Grids. Annu. Rev. Control. Robot. Auton. Syst. 2022, 5, 689–716. [Google Scholar] [CrossRef]
- Chen, Z.; Amani, A.M.; Yu, X.; Jalili, M. Control and Optimisation of Power Grids Using Smart Meter Data: A Review. Sensors 2023, 23, 2118. [Google Scholar] [CrossRef]
- Khan, N.; Shahid, Z.; Alam, M.M.; Abu Bakar Sajak, A.; Mazliham, M.S.; Ahmed Khan, T.; Rizvi, S.S.A. Energy Management Systems Using Smart Grids: An Exhaustive Parametric Comprehensive Analysis of Existing Trends, Significance, Opportunities, and Challenges. Int. Trans. Electr. Energy Syst. 2022, 2022, 1–38. [Google Scholar] [CrossRef]
- Ajaz, W.; Bernell, D. Microgrids and the transition toward decentralized energy systems in the United States: A Multi-Level Perspective. Energy Policy 2021, 149, 112094. [Google Scholar] [CrossRef]
- Carareto, R.; Baptista, M.S.; Grebogi, C. Natural synchronization in power-grids with anti-correlated units. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 1035–1046. [Google Scholar] [CrossRef]
- Taher, H.; Olmi, S.; Scholl, E. Enhancing power grid synchronization and stability through time-delayed feedback control. Phys. Rev. E 2019, 100, 062306. [Google Scholar] [CrossRef] [PubMed]
- Cuadra, L.; Salcedo-Sanz, S.; Del Ser, J.; Jiménez-Fernández, S.; Geem, Z.W. A Critical Review of Robustness in Power Grids Using Complex Networks Concepts. Energies 2015, 8, 9211–9265. [Google Scholar] [CrossRef]
- Budrikis, Z. Stability of power grids. Nat. Rev. Phys. 2022, 4, 635. [Google Scholar] [CrossRef]
- Galesky, L.F.; Rodrigues, L.A.; Duarte, E.P., Jr.; Arantes, L. Efficient Synchronization of CRDTs using VCube-PS. In Proceedings of the 12th Latin-American Symposium on Dependable and Secure Computing (LADC’23), La Paz, Bolivia, 16–18 October 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 50–59. [Google Scholar] [CrossRef]
- Galesky, L.F.; Rodrigues, L.A. Efficient CRDT Synchronization at Scale using a Causal Multicast over a Virtual Hypercube Overlay. In Proceedings of the 11th Latin-American Symposium on Dependable Computing (LADC’22), Fortaleza, Brazil, 21–24 November 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 84–88. [Google Scholar] [CrossRef]
- Simić, M.; Stojkov, M.; Sladić, G.; Milosavljević, B. CRDTs as replication strategy in large-scale edge distributed system: An overview. In Proceedings of the ICIST 2020: Proceedings of the 10th International Conference on Information Systems and Technologies, Lecce, Italy, 4–5 June 2020; Zdravković, M., Konjović, Z., Trajanović, M., Eds.; pp. 46–50. [Google Scholar]
- Zhang, Y.; Wang, J.K.; Han, Y.J. CChain: A high throughput blockchain system. In Proceedings of the Proc. SPIE 12599, Second International Conference on Digital Society and Intelligent Systems (DSInS 2022), 125990K (3 April 2023), Chengdu, China, 2–4 December 2022. [Google Scholar] [CrossRef]
- Shi, P.; Cui, Y.; Xu, K.; Zhang, M.; Ding, L. Data Consistency Theory and Case Study for Scientific Big Data. Information 2019, 10, 137. [Google Scholar] [CrossRef]
- Gilbert, S.; Lynch, N. Brewer’s conjecture and the feasibility of consistent, available, partition-tolerant web services. SIGACT News 2002, 33, 51–59. [Google Scholar] [CrossRef]
- Kleppmann, M. A Critique of the CAP Theorem. arXiv 2015, arXiv:1509.05393. [Google Scholar]
- Zhao, X.; Haller, P. Replicated data types that unify eventual consistency and observable atomic consistency. J. Log. Algebr. Methods Program. 2020, 114, 100561. [Google Scholar] [CrossRef]
- Barreto, A.; Paulino, H.; Silva, J.A.; Preguiça, N. PS-CRDTs: CRDTs in highly volatile environments. Future Gener. Comput. Syst. 2023, 141, 755–767. [Google Scholar] [CrossRef]
- Lv, X.; He, F.; Cheng, Y.; Wu, Y. A novel CRDT-based synchronization method for real-time collaborative CAD systems. Adv. Eng. Inform. 2018, 38, 381–391. [Google Scholar] [CrossRef]
- Acher, Q.; Ignat, C.; Ibrahim, S. Quantifying the Performance of Conflict-free Replicated Data Types in InterPlanetary File System. In Proceedings of the 4th International Workshop on Distributed Infrastructure for the Common Good (DICG’23), Bologna, Italy, 11–15 December 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 19–24. [Google Scholar] [CrossRef]
- Li, C.; Porto, D.; Clement, A.; Gehrke, J.; Preguiça, N.M.; Rodrigues, R. Making geo-replicated systems fast as possible, consistent when necessary. In Proceedings of the 10th USENIX Symposium on Operating Systems Design and Implementation (OSDI 12), Hollywood, CA, USA, 8–10 October 2012; USENIX Association: Berkeley, CA, USA, 2012; pp. 265–278. [Google Scholar]
- Cai, W.; He, F.; Lv, X. Multi-core accelerated CRDT for large-scale and dynamic collaboration. J. Supercomput. 2022, 78, 10799–10828. [Google Scholar] [CrossRef]
- Gomes, V.B.F.; Kleppmann, M.; Mulligan, D.P.; Beresford, A.R. Verifying strong eventual consistency in distributed systems. Proc. ACM Program. Lang. (PACMPL) 2017, 1, 1–28. [Google Scholar] [CrossRef]
- Ahuja, A.; Gupta, G.; Sidhanta, S. Edge Applications: Just Right Consistency. In Proceedings of the 2019 38th Symposium on Reliable Distributed Systems (SRDS), Lyon, France, 1–4 October 2019; pp. 351–3512. [Google Scholar] [CrossRef]
- Al-Darrab, A.I.; Rushdi, A.M.A. Multi-State Reliability Evaluation of Local Area Networks. In Proceedings of the 2021 National Computing Colleges Conference (NCCC), Taif, Saudi Arabia, 27–28 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Weikert, D.; Steup, C.; Mostaghim, S. Availability-Aware Multiobjective Task Allocation Algorithm for Internet of Things Networks. IEEE Internet Things J. 2022, 9, 12945–12953. [Google Scholar] [CrossRef]
- Tariverdi, A.; Torresen, J. Rafting Towards Consensus: Formation Control of Distributed Dynamical Systems. arXiv 2023. [Google Scholar] [CrossRef]
- Alahmad, Y.; Agarwal, A. Multiple objectives dynamic VM placement for application service availability in cloud networks. J. Cloud Comp. 2024, 13, 46. [Google Scholar] [CrossRef]
- DSTU EN 50160:2014; Voltage Characteristics of Electricity Supplied by Public Electricity Networks. State Standard of Ukraine (DSTU). Derzhspozhyvstandart Ukrainy: Kyiv, Ukraine, 2024. Available online: https://dnaop.com/html/61662/doc-%D0%94%D0%A1%D0%A2%D0%A3_EN_50160_2014 (accessed on 27 November 2024).
- IEEE 1547-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. Available online: https://standards.ieee.org/ieee/1547/5915/ (accessed on 27 November 2024).
- IEEE C37.90-2005; IEEE Standard for Relays and Relay Systems Associated with Electric Power Apparatus. Available online: https://standards.ieee.org/ieee/C37.90/3284/ (accessed on 27 November 2024).
- Masood, F.; Faridi, A.R. Consensus Algorithms In Distributed Ledger Technology For Open Environment. In Proceedings of the 2018 4th International Conference on Computing Communication and Automation (ICCCA), Greater Noida, India, 14–15 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Tanenbaum, A.S.; van Steen, M. Distributed Systems: Principles and Paradigms, 2nd ed.; CreateSpace: Scotts Valley, CA, USA, 2016. [Google Scholar]
- Preguiça, N. Conflict-free Replicated Data Types: An Overview. arXiv 2018, arXiv:1806.10254. [Google Scholar]
- Saito, Y.; Shapiro, M. Optimistic replication. ACM Comput. Surv. 2005, 37, 42–81. [Google Scholar] [CrossRef]
- Almeida, P.S. Approaches to Conflict-free Replicated Data Types. arXiv 2024, arXiv:2310.18220. [Google Scholar] [CrossRef]
- Shapiro, M.; Preguiça, N.; Baquero, C.; Zawirski, M. Conflict-Free Replicated Data Types; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 386–400. [Google Scholar] [CrossRef]
- Letia, M.; Preguiça, N.; Shapiro, M. CRDTs: Consistency without Concurrency Control. arXiv 2009, arXiv:0907.0929. [Google Scholar]
- Shapiro, M.; Preguiça, N.; Baquero, C.; Zawirski, M. A Comprehensive Study of Convergent and Commutative Replicated Data Types; RR-7506, Inria—Centre Paris-Rocquencourt; INRIA: Le Chesnay, France, 2011; p. 50. Available online: https://hal.inria.fr/file/index/docid/555588/filename/techreport.pdf (accessed on 27 November 2024).
- Saquib, N.; Krintz, C.; Wolski, R. Log-Based CRDT for Edge Applications. In Proceedings of the 2022 IEEE International Conference on Cloud Engineering (IC2E), Pacific Grove, CA, USA, 26–30 September 2022; pp. 126–137. [Google Scholar] [CrossRef]
- Qayyum, O.; Yu, W. Coordination-Free Replicated Datalog Streams with Application-Specific Availability. In Advances in Databases and Information Systems. ADBIS 2024; Tekli, J., Gamper, J., Chbeir, R., Manolopoulos, Y., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2024; Volume 14918, pp. 155–169. [Google Scholar] [CrossRef]
- Kleppmann, M.; Mulligan, D.P.; Gomes, V.B.; Beresford, A.R. A Highly-Available Move Operation for Replicated Trees. IEEE Trans. Parallel Distrib. Syst. 2022, 33, 1711–1724. [Google Scholar] [CrossRef]
- Biletskyy, B.O. Horizontal and vertical scalability of machine learning methods. Probl. Program. 2019, 2, 69–80. [Google Scholar] [CrossRef]
- Balazinska, M.; Balakrishnan, H.; Madden, S.R.; Stonebraker, M. Fault tolerance in the borealis distributed stream processing system. ACM Trans. Database Syst. 2018, 33, 1–44. [Google Scholar] [CrossRef]
- Ongaro, D.; Ousterhout, J. In search of an understandable consensus algorithm. In Proceedings of the 2014 USENIX Conference on USENIX Annual Technical Conference (USENIX ATC’14), Philadelphia PA, USA, 19–20 June 2014; Association for Computing Machinery: Philadelphia, PA, USA, 2024; pp. 305–320. [Google Scholar]
- Bolosky, W.J.; Bradshaw, D.; Haagens, R.B.; Kusters, N.P.; Li, P. Paxos replicated state machines as the basis of a high-performance data store. In Proceedings of the 8th USENIX Conference on Networked Systems Design and Implementation (NSDI’11), Boston, MA, USA, 30 March–1 April 2011; USENIX Association: Boston, MA, USA, 2011; pp. 141–154. [Google Scholar]
- Oshnoei, A.; Peyghami, S.; Mokhtari, H.; Blaabjerg, F. Grid Synchronization for Distributed Generations. In Encyclopedia of Sustainable Technologies, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2024; pp. 517–537. [Google Scholar] [CrossRef]
- Olmi, S.; Gambuzza, L.V.; Frasca, M. Multilayer control of synchronization and cascading failures in power grids. Chaos Solitons Fractals 2024, 180, 517–537. [Google Scholar] [CrossRef]
- Enes, V.; Almeida, P.S.; Baquero, C.; Leitão, J. Efficient Synchronization of State-Based CRDTs. In Proceedings of the 2019 IEEE 35th International Conference on Data Engineering (ICDE), Macao, China, 8–11 April 2019; pp. 148–159. [Google Scholar] [CrossRef]
- Nation, J.B. Semilattices, Lattices and Complete Lattices. In Revised Notes on Lattice Theory; University of Hawaii Math Department: Honolulu, HI, USA, 1990; Available online: https://math.hawaii.edu/~jb/books.html (accessed on 27 November 2024).
- Almeida, P.S.; Shoker, A.; Baquero, C. Delta State Replicated Data Types. J. Parallel Distrib. Comput. 2018, 111, 162–173. [Google Scholar] [CrossRef]
- Baquero, C.; Almeida, P.S.; Shoker, A. Making Operation-Based CRDTs Operation-Based. In Proceedings of the 14th IFIP International Conference on Distributed Applications and Interoperable Systems, DAIS 2014, Berlin, Germany, 3–5 June 2014; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8460, pp. 126–140. [Google Scholar] [CrossRef]
- Helland, P. Idempotence Is Not a Medical Condition: An essential property for reliable systems. Queue 2012, 10, 30–46. [Google Scholar] [CrossRef]
- Preguiça, N.; Baquero, C.; Shapiro, M. Conflict-Free Replicated Data Types (CRDTs). In Encyclopedia of Big Data Technologies; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Jannes, K.; Lagaisse, B.; Joosen, W. Secure replication for client-centric data stores. In Proceedings of the DICG 2022, Quebec, QC, Canada, 7 November 2022; ACM: New York, NY, USA, 2022; pp. 31–36. [Google Scholar] [CrossRef]
- Portela, B.; Pacheco, H.; Jorge, P.; Pontes, R. General-Purpose Secure Conflict-free Replicated Data Types. In Proceedings of the 2023 IEEE 36th Computer Security Foundations Symposium (CSF), Dubrovnik, Croatia, 10–14 July 2023; pp. 521–536. [Google Scholar] [CrossRef]
- An Optimized Conflict-Free Replicated Set. Available online: https://hal.inria.fr/file/index/docid/738680/filename/RR-8083.pdf (accessed on 27 November 2024).
- Hewitt, C. Actor Model of Computation: Scalable Robust Information Systems. arXiv 2015, arXiv:1008.1459. [Google Scholar]
- Akka Toolkit. Available online: https://akka.io/ (accessed on 27 November 2024).
- The Reactive Manifesto. Available online: https://www.reactivemanifesto.org/ (accessed on 27 November 2024).
- Pereira, F.d.A.; Katsigarakis, K.; Rovas, D.; Pritoni, M.; Shaw, C.; Paul, L.; Prakash, A.; Martin-Toral, S.; Finn, D.; O’Donnell, J. A semantics-driven framework to enable demand flexibility control applications in real buildings. Adv. Eng. Inform. 2025, 64, 103049. [Google Scholar] [CrossRef]
- Janczykowski, M.; Turek, W.; Malawski, M.; Byrski, A. Large-scale urban traffic simulation with Scala and high-performance computing system. J. Comput. Sci. 2019, 35, 91–101. [Google Scholar] [CrossRef]
- Bujas, J.; Dworak, D.; Turek, W.; Byrski, A. High-performance computing framework with desynchronized information propagation for large-scale simulations. J. Comput. Sci. 2019, 32, 70–86. [Google Scholar] [CrossRef]
- Garnock-Jones, T. History of Actor, Lecture Notes Harvard University. 2016. Available online: https://groups.seas.harvard.edu/courses/cs252/2016fa/12.pdf (accessed on 27 November 2024).
- Camilleri, C.; Vella, J.G.; Nezval, V. Horizontally Scalable Implementation of a Distributed DBMS Delivering Causal Consistency via the Actor Model. Electronics 2024, 13, 3367. [Google Scholar] [CrossRef]
- Agha, G.A.; Mason, I.A.; Smith, S.F.; Talcott, C.L. A foundation for actor computation. J. Funct. Program. 1997, 7, 1–72. [Google Scholar] [CrossRef]
- Vigilant Hawk. Available online: https://github.com/ipk0/vigilant-hawk (accessed on 27 November 2024).
- To, Q.; Soto, J.; Markl, V. A Survey of State Management in Big Data Processing Systems. arXiv 2018, arXiv:1702.01596. [Google Scholar] [CrossRef]
- ACTORS: A Model of Concurrent Computation in Distributed Systems. Available online: https://dspace.mit.edu/handle/1721.1/6952 (accessed on 27 November 2024).
- Fu, L. An adaptive routing algorithm for in-vehicle route guidance systems with real-time information. Transp. Res. Part B Methodol. 2001, 35, 749–765. [Google Scholar] [CrossRef]
- Bakhshi, R.; Gavidia, D.; Fokkink, W.; van Steen, M. An analytical model of information dissemination for a gossip-based protocol. Comput. Netw. 2009, 53, 2288–2303. [Google Scholar] [CrossRef]
- Barbosa, M.; Ferreira, B.; Marques, J.; Portela, B.; Preguiça, N. Secure Conflict-free Replicated Data Types. In Proceedings of the 22nd International Conference on Distributed Computing and Networking, ICDCN 21, Nara, Japan, 5–8 January 2021; ACM: New York, NY, USA, 2021; pp. 6–15. [Google Scholar] [CrossRef]
- Biener, W.; Garcia Rosas, K.R. Grid reduction for energy system analysis. Electr. Power Syst. Res. 2020, 185, 106349. [Google Scholar] [CrossRef]
- Priesmann, J.; Nolting, L.; Praktiknjo, A. Are complex energy system models more accurate? An intra-model comparison of power system optimization models. Appl. Energy 2019, 255, 113783. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | S3 | |
|---|---|---|---|
| S1 | 0 | f2 | f2 |
| S2 | f1 | 0 | f2 |
| S3 | f1 | f1 | 0 |
| Criterion | CRDT-Based | Lock/Consensus-Based |
|---|---|---|
| Consistency Model | Eventual consistency | Strong consistency |
| Latency | Low (local updates) | Higher (requires coordination) |
| Availability | High | Dependent on quorum/leader |
| Conflict Handling | Automatic and deterministic | Explicit locking or quorum decisions |
| Scalability | High | Moderate |
| Use Cases | Collaborative, real-time systems | Mission-critical, transactional systems |
| Aspect | State-Based (CvRDT) | Operation-Based (CmRDT) |
|---|---|---|
| Communication | Full state exchanges | Operation deltas |
| Complexity | Simple (state merge function) | Complex (requires reliable, causal operation delivery) |
| Overhead | High (state size grows with dataset) | Low (operation size) |
| Consistency | Idempotence and associativity ensure eventual consistency | Operations commute to ensure consistency |
| Message Loss | Resilient (full state re-propagation handles loss) | Vulnerable unless using reliable delivery mechanisms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prymushko, A.; Puchko, I.; Yaroshynskyi, M.; Sinko, D.; Kravtsov, H.; Artemchuk, V. Efficient State Synchronization in Distributed Electrical Grid Systems Using Conflict-Free Replicated Data Types. IoT 2025, 6, 6. https://doi.org/10.3390/iot6010006
Prymushko A, Puchko I, Yaroshynskyi M, Sinko D, Kravtsov H, Artemchuk V. Efficient State Synchronization in Distributed Electrical Grid Systems Using Conflict-Free Replicated Data Types. IoT. 2025; 6(1):6. https://doi.org/10.3390/iot6010006
Chicago/Turabian StylePrymushko, Arsentii, Ivan Puchko, Mykola Yaroshynskyi, Dmytro Sinko, Hryhoriy Kravtsov, and Volodymyr Artemchuk. 2025. "Efficient State Synchronization in Distributed Electrical Grid Systems Using Conflict-Free Replicated Data Types" IoT 6, no. 1: 6. https://doi.org/10.3390/iot6010006
APA StylePrymushko, A., Puchko, I., Yaroshynskyi, M., Sinko, D., Kravtsov, H., & Artemchuk, V. (2025). Efficient State Synchronization in Distributed Electrical Grid Systems Using Conflict-Free Replicated Data Types. IoT, 6(1), 6. https://doi.org/10.3390/iot6010006