
Conflict Detection and Resolution in IoT Systems: A Survey


Abstract
1. Introduction
1.1. Conflict Issues in IoT Systems
1.2. Goals and Relationships to Other Surveys
1.3. Paper Outline
2. Dependencies, Conflicts, and Accessibility in IoT Systems
2.1. IoT System Environment
2.2. Dependencies and Conflicts
2.3. Impact of Multiparty Environment
2.4. An Illustrative Example
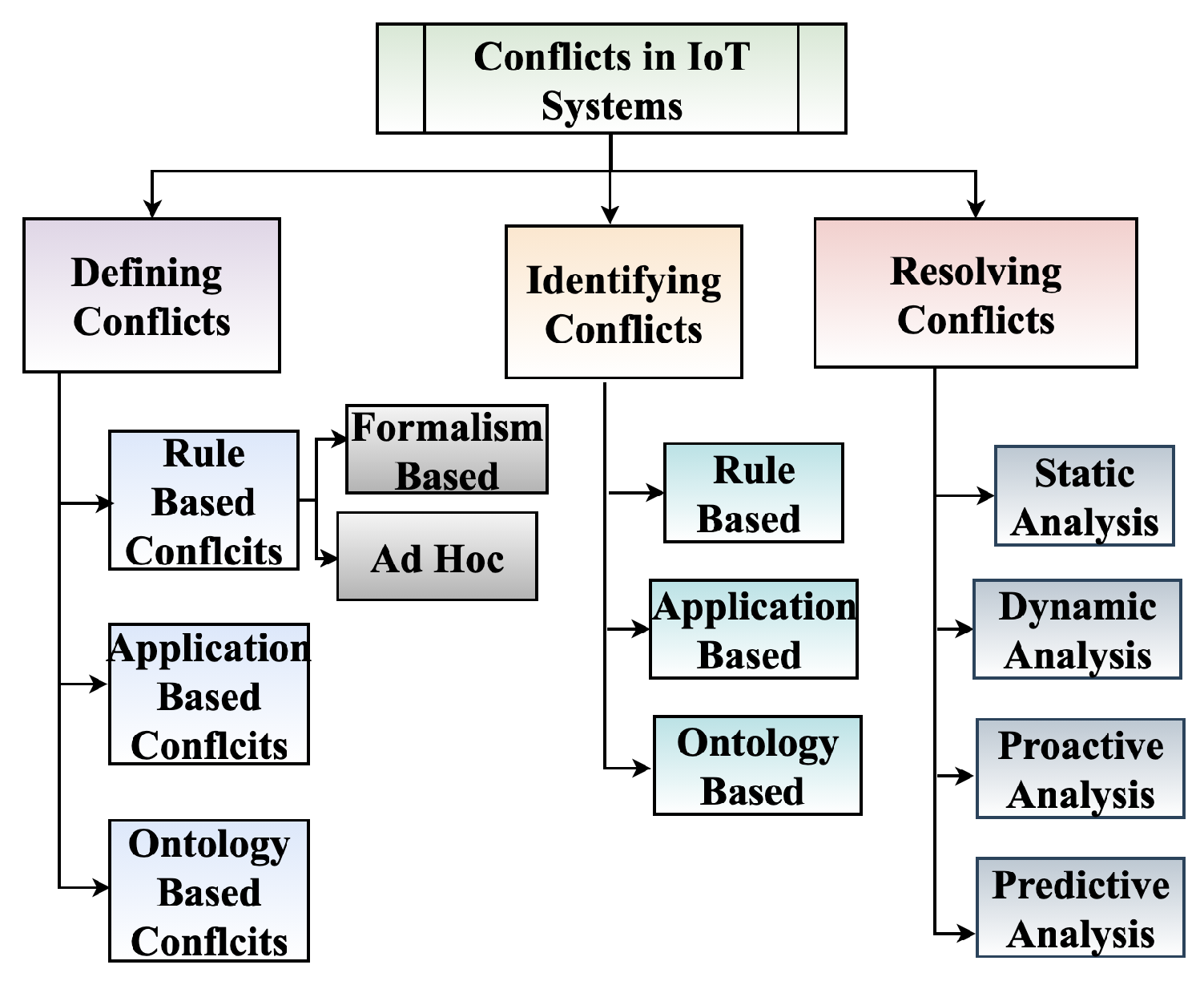
3. Literature Analysis of Conflict Characterization
3.1. Rule-Based Conflicts
3.1.1. Formalism-Based Rule Conflicts
3.1.2. Ad Hoc Rule Conflicts
3.2. Application-Based Conflicts
3.3. Ontology Based Conflicts
4. Literature Analysis of Conflict Identification Methods
4.1. Operational and Conflict Representations
4.2. Rule-Based Tools
4.2.1. Rule-Based Conflict Identification Methods
4.2.2. Formal Methods for Conflict Identification
4.3. Application-Based Tools
Application-Based Conflict Identification Methods
4.4. Ontology-Based Tools
Ontology-Based Conflict Identification Methods
4.5. Static vs. Dynamic Conflict Detection Methods
5. Literature Analysis on Conflict Analysis and Resolution Strategy
5.1. Classification of Conflict Analysis and Resolution
5.2. Proactive Resolution
5.3. Predictive Resolution
5.4. Static Analysis of IoT Systems
5.5. Dynamic Analysis of IoT Systems
6. Proactive Conflict Resolution in IoT Systems
6.1. Proactive Conflict Detection
6.2. Automated Conflict Resolution
HVAC: if [(Temp > 110F ∧ Firealarm_on > 2 min) ∨ (CO2_level > 15% ∧ Firealarm_on > 2 min)], turnon_sprinkler
and the safety property:Security: if (water_level > 15%), turnoff_sprinkler
if (sprinkler_on > 3 min), turnoff_sprinkler
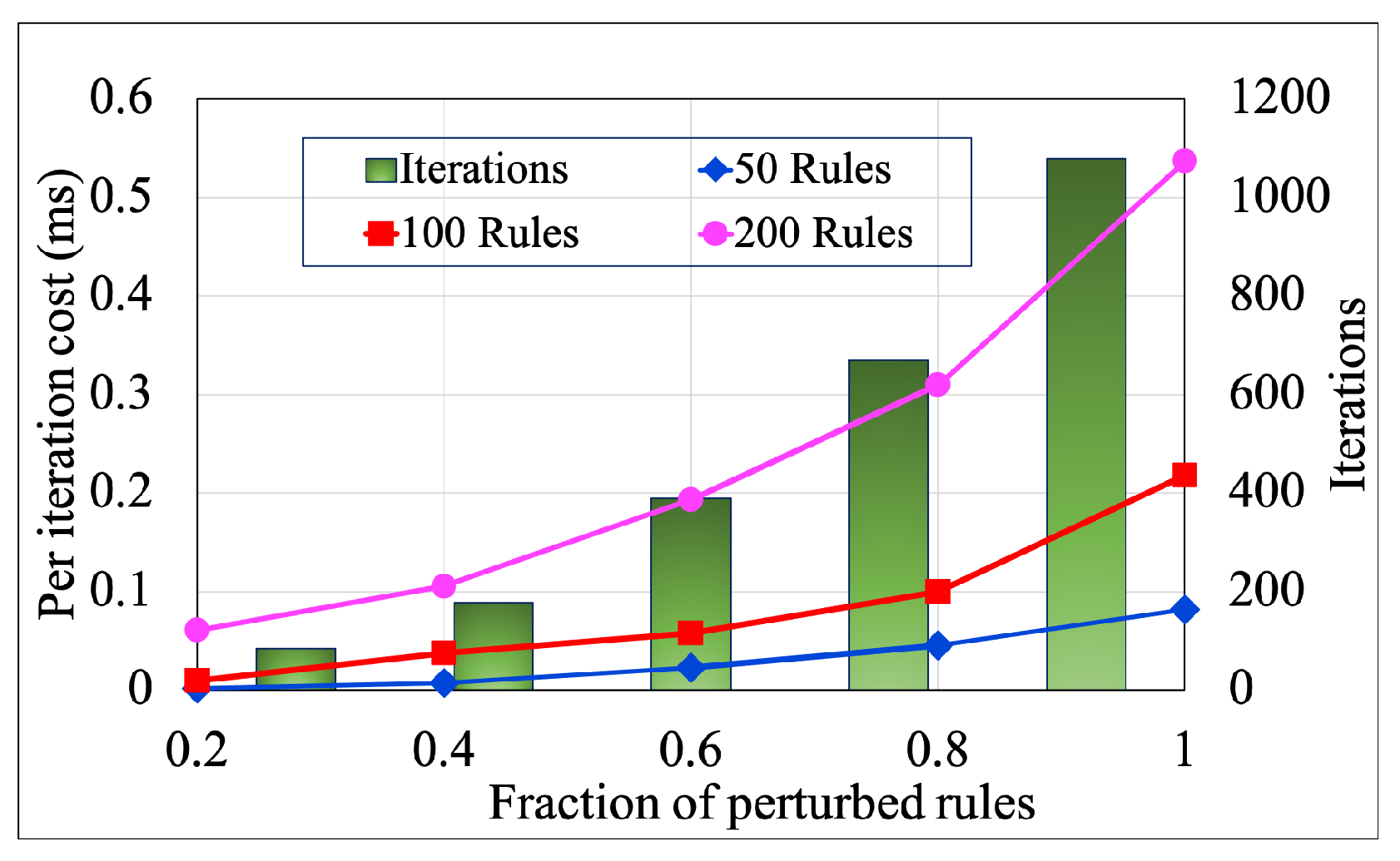
6.3. Combinatorial-Optimization-Based Approach
7. Future Challenges in Conflict Detection and Resolution
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Strategy Analytics. IoT Strategies. Available online: www.strategyanalytics.com (accessed on 30 December 2014).
- Evans, D. The Internet of Things—How the Next Evolution of the Internet Is Changing Everything. Available online: www.cisco.com (accessed on 30 December 2014).
- Ibrahim, H.; Khattab, S.; Elsayed, K.; Badr, A.; Nabil, E. A formal methods-based Rule Verification Framework for end-user programming in campus Building Automation Systems. Build. Environ. 2020, 181, 106983. [Google Scholar] [CrossRef]
- Ibrahim, H.; Hassan, H.; Nabil, E. A conflicts’ classification for IoT-based services: A comparative survey. PeerJ Comput. Sci. 2021, 7, e480. [Google Scholar] [CrossRef] [PubMed]
- Kho, J. The Next Wave in Lighting and the Internet of Things. Available online: www.forbes.com (accessed on 30 December 2014).
- Philips. Hue Personal Wireless Lighting. Available online: www2.meethue.com (accessed on 30 December 2014).
- Nest. The Brighter Way to Save Energy. Available online: https://nest.com/ (accessed on 30 December 2014).
- Farber, D. Dacor Bakes Android Tablet into Wall Oven. Available online: http://www.cnet.com/ (accessed on 30 December 2014).
- Schramm, M. CES Unveiled: The HAPIfork Aims to Help You Track Your Eating Habits with Bluetooth. Available online: http://www.tuaw.com/ (accessed on 30 December 2014).
- Gizmag. Butterfleye Smart Surveillance Camera Keeps Watch with Your iPhone. Available online: http://www.gizmag.com (accessed on 30 December 2014).
- Samsung. Smart Home. Intelligent Living. Available online: www.kickstarter.com/ (accessed on 30 December 2014).
- Supermechanical. Listen to Your Home Wherever You Are. Available online: supermechanical.com/twine/ (accessed on 30 December 2014).
- Vipersecurity. Control, Track, Locate, and Start Your Car from Virtually Anywhere with Your Smartphone. Available online: www.vipersecurity.com.au/ (accessed on 30 December 2014).
- Haj-Assaad, S. QNX Previews Tesla-Sized Touch Screen in a Bentley. Available online: www.autoguide.com/ (accessed on 30 December 2014).
- Vermesan, O.; Friess, P. Internet of Things—Converging Technologies for Smart Environments and Integrated Ecosystems. Available online: www.internet-of-things-research.eu (accessed on 30 December 2014).
- Information Communication Development Authority of Singapore. The Internet of Things. Available online: www.ida.gov.sg (accessed on 30 December 2014).
- Al-Farooq, A.; Al-Shaer, E.; Kant, K. A Formal Method for Detecting Rule Conflicts in Large Scale IoT Systems. In Proceedings of the IFIP/IEEE International Symposium on Integrated Network Management (IM 2019), Washington, DC, USA, 8–12 April 2019. [Google Scholar]
- Pradeep, P.; Pal, A.; Kant, K. Automating Conflict Detection and Mitigation in Large-Scale IoT Systems. In Proceedings of the 2021 IEEE/ACM 21st International Symposium on Cluster, Cloud and Internet Computing (CCGrid), Melbourne, Australia, 10–13 May 2021. [Google Scholar]
- Hsu, K.H.; Chiang, Y.H.; Hsiao, H.C. Safechain: Securing trigger-action programming from attack chains. IEEE Trans. Inf. Forensics Secur. 2019, 14, 2607–2622. [Google Scholar] [CrossRef]
- Ma, M.; Preum, S.M.; Stankovic, J.A. Cityguard: A watchdog for safety-aware conflict detection in smart cities. In Proceedings of the Second International Conference on Internet-of-Things Design and Implementation, Pittsburgh, PA, USA, 18–21 April 2017; pp. 259–270. [Google Scholar]
- Liu, R.; Wang, Z.; Garcia, L.; Srivastava, M. RemedioT: Remedial actions for internet-of-things conflicts. In Proceedings of the 6th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, New York, NY, USA, 13–14 November 2019; pp. 101–110. [Google Scholar]
- Celik, Z.B.; Tan, G.; McDaniel, P.D. IoTGuard: Dynamic Enforcement of Security and Safety Policy in Commodity IoT; NDSS: San Diego, CA, USA, 2019. [Google Scholar]
- Shah, T.; Venkatesan, S.; Ngo, T.; Neelamegam, K. Conflict detection in rule based IoT systems. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 0276–0284. [Google Scholar]
- Chaki, D.; Bouguettaya, A.; Mistry, S. A Conflict Detection Framework for IoT Services in Multi-resident Smart Homes. arXiv 2020, arXiv:cs.CY/2004.12702. [Google Scholar]
- Abusafia, A.; Bouguettaya, A. Reliability Model for Incentive-Driven IoT Energy Services. arXiv 2021, arXiv:cs.DC/2011.06159. [Google Scholar]
- Lakhdari, A.; Bouguettaya, A.; Mistry, S.; Neiat, A.G.; Suleiman, B. Elastic Composition of Crowdsourced IoT Energy Services. arXiv 2020, arXiv:cs.DC/2011.06771. [Google Scholar]
- Huang, B.; Dong, H.; Bouguettaya, A. Conflict Detection in IoT-based Smart Homes. arXiv 2021, arXiv:2107.13179. [Google Scholar]
- Perumal, T.; Sulaiman, M.N.; Datta, S.K.; Ramachandran, T.; Leong, C.Y. Rule-based conflict resolution framework for Internet of Things device management in smart home environment. In Proceedings of the 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–2. [Google Scholar]
- Oh, H.; Ahn, S.; Choi, J.K.; Yang, J. Mashup service conflict detection and visualization method for Internet of Things. In Proceedings of the 2017 IEEE 6th global conference on consumer electronics (GCCE), Nara, Japan, 9–12 October 2018; IEEE: Piscataway, NJ, USA, 2017; pp. 1–2. [Google Scholar]
- Sun, Y.; Wang, X.; Luo, H.; Li, X. Conflict detection scheme based on formal rule model for smart building systems. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 215–227. [Google Scholar] [CrossRef]
- Ahmed, M.O.; Elfaki, S.E.E. Adaptation Conflicts of Heterogeneous Devices in IOT Smart-Home. Am. Acad. Sci. Res. J. Eng. Technol. Sci. 2021, 81, 64–78. [Google Scholar]
- Nakamura, M.; Igaki, H.; Matsumoto, K.I. Feature interactions in integrated services of networked home appliances. In Proceedings of the International Conference on Feature Interactions in Telecommunication Networks and Distributed Systems (ICFI’05), Leicester, UK, 28–30 June 2005; pp. 236–251. [Google Scholar]
- Leelaprute, P.; Matsuo, T.; Tsuchiya, T.; Kikuno, T. Detecting feature interactions in home appliance networks. In Proceedings of the 2008 Ninth ACIS International Conference on Software Engineering, Artificial Intelligence, Networking, and Parallel/Distributed Computing, Phuket, Thailand, 6–8 August 2008; IEEE: Phuket, Thailand, 2008; pp. 895–903. [Google Scholar]
- Leelaprute, P. Resolution of feature interactions in integrated services of home network system. In Proceedings of the 2007 Asia-Pacific Conference on Communications, Bangkok, Thailand, 18–20 October 2007; IEEE: Bangkok, Thailand, 2007; pp. 363–366. [Google Scholar]
- Igaki, H.; Nakamura, M. Modeling and detecting feature interactions among integrated services of home network systems. IEICE Trans. Inf. Syst. 2010, 93, 822–833. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Shen, X. DIAC: An Inter-app Conflicts Detector for Open IoT Systems. ACM Trans. Embed. Comput. Syst. (TECS) 2020, 19, 1–25. [Google Scholar] [CrossRef]
- Camacho, R.; Carreira, P.; Lynce, I.; Resendes, S. An ontology-based approach to conflict resolution in Home and Building Automation Systems. Expert Syst. Appl. 2014, 41, 6161–6173. [Google Scholar] [CrossRef]
- IFTTT PLATFORM. Available online: https://platform.ifttt.com/docs#introduction (accessed on 15 February 2020).
- Cabitza, F.; Fogli, D.; Lanzilotti, R.; Piccinno, A. Rule-based tools for the configuration of ambient intelligence systems: A comparative user study. Multimed. Tools Appl. 2017, 76, 5221–5241. [Google Scholar] [CrossRef]
- TASKER For Android. Available online: https://tasker.joaoapps.com/index.html (accessed on 10 October 2021).
- BIPIO GRaph API. Available online: https://github.com/bipio-server/bipio/wiki (accessed on 10 October 2021).
- WIGWAG SMARTHOME. Available online: https://www.wigwagapp.com/ (accessed on 10 October 2021).
- ZIPATILE2. Available online: https://www.zipato.com/ (accessed on 10 October 2021).
- Sun, Q.; Yu, W.; Kochurov, N.; Hao, Q.; Hu, F. A multi-agent-based intelligent sensor and actuator network design for smart house and home automation. J. Sens. Actuator Netw. 2013, 2, 557–588. [Google Scholar] [CrossRef]
- Luo, H.; Wang, R.; Li, X. A rule verification and resolution framework in smart building system. In Proceedings of the 2013 International Conference on Parallel and Distributed Systems, Seoul, Korea, 15–18 December 2013; IEEE: Seoul, Korea, 2013; pp. 438–439. [Google Scholar]
- Maternaghan, C.; Turner, K.J. Policy conflicts in home automation. Comput. Netw. 2013, 57, 2429–2441. [Google Scholar] [CrossRef][Green Version]
- Newcomb, J.L.; Chandra, S.; Jeannin, J.B.; Schlesinger, C.; Sridharan, M. IOTA: A calculus for internet of things automation. In Proceedings of the 2017 ACM SIGPLAN International Symposium on New Ideas, New Paradigms, and Reflections on Programming and Software, Vancouver, BC, Canada, 25–27 October 2017; pp. 119–133. [Google Scholar]
- Bak, N.; Chang, B.M.; Choi, K. Smart block: A visual programming environment for smartthings. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; Volume 2, pp. 32–37. [Google Scholar]
- Sen, J. Internet of Things: Technology, Applications and Standardization; BoD–Books on Demand: Norderstedt, Germany, 2018. [Google Scholar]
- Xie, W.; Zhu, H.; Wu, X.; Vinh, P.C. Formal verification of mCWQ using extended Hoare logic. Mob. Netw. Appl. 2019, 24, 134–144. [Google Scholar] [CrossRef]
- Shehata, M.; Eberlein, A.; Fapojuwo, A. Using semi-formal methods for detecting interactions among smart homes policies. Sci. Comput. Program. 2007, 67, 125–161. [Google Scholar] [CrossRef]
- Shehata, M.; Eberlein, A.; Fapojuwo, A.O. A taxonomy for identifying requirement interactions in software systems. Comput. Netw. 2007, 51, 398–425. [Google Scholar] [CrossRef]
- Carreira, P.; Resendes, S.; Santos, A.C. Towards automatic conflict detection in home and building automation systems. Pervasive Mob. Comput. 2014, 12, 37–57. [Google Scholar] [CrossRef]
- Android Things Website. Available online: https://developer.android.com/things (accessed on 10 October 2021).
- SAMSUNG Smartthings. Available online: https://www.samsung.com (accessed on 10 October 2021).
- Apple Homekit 2021. Available online: https://www.apple.com/shop/accessories/all/homekit (accessed on 10 October 2021).
- OpenHAB 2021. Available online: https://www.openhab.org/ (accessed on 10 October 2021).
- Shen, X.; Zhang, L.; Li, X. A Systematic Examination of Inter-App Conflicts Detections in Open IoT Systems; Technical Report; North Carolina State University, Department of Computer Science: Raleigh, NC, USA, 2017. [Google Scholar]
- Liang, C.J.M.; Karlsson, B.F.; Lane, N.D.; Zhao, F.; Zhang, J.; Pan, Z.; Li, Z.; Yu, Y. SIFT: Building an internet of safe things. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WA, USA, 14–16 April 2015; pp. 298–309. [Google Scholar]
- Trimananda, R.; Aqajari, S.A.H.; Chuang, J.; Demsky, B.; Xu, G.H.; Lu, S. Understanding and automatically detecting conflicting interactions between smart home IOT applications. In Proceedings of the 28th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Online, 8–13 November 2020; pp. 1215–1227. [Google Scholar]
- Celik, Z.B.; McDaniel, P.; Tan, G. Soteria: Automated IOT safety and security analysis. In Proceedings of the 2018 USENIX ATC, Boston, MA, USA, 11–13 July 2018; pp. 147–158. [Google Scholar]
- Munir, S.; Stankovic, J.A. Depsys: Dependency aware integration of cyber-physical systems for smart homes. In Proceedings of the 2014 ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), Berlin, Germany, 14–17 April 2014; pp. 127–138. [Google Scholar]
- Nguyen, D.T.; Song, C.; Qian, Z.; Krishnamurthy, S.V.; Colbert, E.J.; McDaniel, P. IotSan: Fortifying the safety of IoT systems. In Proceedings of the 14th International Conference on Emerging Networking EXperiments and Technologies, Heraklion, Greece, 4–7 December 2018; pp. 191–203. [Google Scholar]
- Ding, W.; Hu, H. On the safety of IOT device physical interaction control. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 832–846. [Google Scholar]
- Ma, M.; Stankovic, J.A.; Feng, L. Cityresolver: A decision support system for conflict resolution in smart cities. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018; IEEE: Porto, Portugal, 2018; pp. 55–64. [Google Scholar]
- Ma, M.; Stankovic, J.A.; Feng, L. Runtime monitoring of safety and performance requirements in smart cities. In Proceedings of the 1st ACM Workshop on the Internet of Safe Things, Delft, The Netherlands, 5 November 2017; pp. 44–50. [Google Scholar]
- Ma, M.; Preum, S.M.; Stankovic, J.A. Demo abstract: Simulating conflict detection in heterogeneous services of a smart city. In Proceedings of the 2017 IEEE/ACM Second International Conference on Internet-of-Things Design and Implementation (IoTDI), Pittsburgh, PA, USA, 18–21 April 2017; pp. 275–276. [Google Scholar]
- Chaki, D.; Bouguettaya, A. Adaptive priority-based conflict resolution of IoT services. In Proceedings of the 2021 IEEE International Conference on Web Services (ICWS), Chicago, IL, USA, 5–10 September 2021; pp. 663–668. [Google Scholar]
- Berners-Lee, T.; Hendler, J.; Lassila, O. The semantic web. Sci. Am. 2001, 284, 34–43. [Google Scholar] [CrossRef]
- Grau, B.C.; Horrocks, I.; Motik, B.; Parsia, B.; Patel-Schneider, P.; Sattler, U. OWL 2: The next step for OWL. J. Web Semant. 2008, 6, 309–322. [Google Scholar] [CrossRef]
- Bouquet, P.; Giunchiglia, F.; Van Harmelen, F.; Serafini, L.; Stuckenschmidt, H. Contextualizing ontologies. J. Web Semant. 2004, 1, 325–343. [Google Scholar] [CrossRef]
- Horrocks, I.; Patel-Schneider, P.F.; Boley, H.; Tabet, S.; Grosof, B.; Dean, M. SWRL: A semantic web rule language combining OWL and RuleML. W3C Memb. Submiss. 2004, 21, 1–31. [Google Scholar]
- Celik, Z.B.; Babun, L.; Sikder, A.K.; Aksu, H.; Tan, G.; McDaniel, P.; Uluagac, A.S. Sensitive information tracking in commodity IoT. In Proceedings of the 27th USENIX Security Symposium (USENIX Security 18), Baltimore, MD, USA, 15–17 August 2018; pp. 1687–1704. [Google Scholar]
- Ma, M.; Preum, S.M.; Tarneberg, W.; Ahmed, M.; Ruiters, M.; Stankovic, J. Detection of runtime conflicts among services in smart cities. In Proceedings of the 2016 IEEE International Conference on Smart Computing (SMARTCOMP), St. Louis, MO, USA, 18–20 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–10. [Google Scholar]
- Coppers, S.; Vanacken, D.; Luyten, K. FORTNIoT: Intelligible Predictions to Improve User Understanding of Smart Home Behavior. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2020, 4, 1–24. [Google Scholar] [CrossRef]
- Liang, T.; Zeng, B.; Liu, J.; Ye, L.; Zou, C. An unsupervised user behavior prediction algorithm based on machine learning and neural network for smart home. IEEE Access 2018, 6, 49237–49247. [Google Scholar] [CrossRef]
- Du, Y.; Lim, Y.; Tan, Y. A novel human activity recognition and prediction in smart home based on interaction. Sensors 2019, 19, 4474. [Google Scholar] [CrossRef]
- Wu, S.; Rendall, J.B.; Smith, M.J.; Zhu, S.; Xu, J.; Wang, H.; Yang, Q.; Qin, P. Survey on prediction algorithms in smart homes. IEEE Internet Things J. 2017, 4, 636–644. [Google Scholar] [CrossRef]
- Nagendra, V.; Bhattacharya, A.; Yegneswaran, V.; Rahmati, A.; Das, S.R. VISCR: Intuitive & conflict-free automation for securing the dynamic consumer IOT infrastructures. arXiv 2019, arXiv:1907.13288. [Google Scholar]
- Chi, H.; Zeng, Q.; Du, X.; Yu, J. Cross-app interference threats in smart homes: Categorization, detection and handling. In Proceedings of the 2020 50th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), Valencia, Spain, 29 June–2 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 411–423. [Google Scholar]
- Fernandes, E.; Paupore, J.; Rahmati, A.; Simionato, D.; Conti, M.; Prakash, A. Flowfence: Practical data protection for emerging iot application frameworks. In Proceedings of the 25th USENIX Security Symposium (USENIX Security 16), Austin, TX, USA, 10–12 August 2016; pp. 531–548. [Google Scholar]
- Bastys, I.; Balliu, M.; Sabelfeld, A. If this then what? Controlling flows in IoT apps. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 1102–1119. [Google Scholar]
- Mohsin, M.; Anwar, Z.; Husari, G.; Al-Shaer, E.; Rahman, M.A. IoTSAT: A formal framework for security analysis of the Internet of Things. In Proceedings of the IEEE Conference on Communications and Network Security (CNS), Philadelphia, PA, USA, 17–19 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–7. [Google Scholar]
- Tian, Y.; Zhang, N.; Lin, Y.H.; Wang, X.; Ur, B.; Guo, X.; Tague, P. Smartauth: User-centered authorization for the internet of things. In Proceedings of the 26th USENIX Security Symposium (USENIX Security 17), Vancouver, BC, Canada, 16–18 August 2017; pp. 361–378. [Google Scholar]
- Zhang, W.; Meng, Y.; Liu, Y.; Zhang, X.; Zhang, Y.; Zhu, H. Homonit: Monitoring smart home apps from encrypted traffic. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 1074–1088. [Google Scholar]
- Pandita, R.; Xiao, X.; Yang, W.; Enck, W.; Xie, T. WHYPER: Towards automating risk assessment of mobile applications. In Proceedings of the 22nd USENIX Security Symposium (USENIX Security 13), Washington, DC, USA, 14–16 August 2013; pp. 527–542. [Google Scholar]
- Wang, J.; Hao, S.; Wen, R.; Zhang, B.; Zhang, L.; Hu, H.; Lu, R. IoT-praetor: Undesired behaviors detection for IoT devices. IEEE Internet Things J. 2020, 8, 927–940. [Google Scholar] [CrossRef]
- Jia, Y.J.; Chen, Q.A.; Wang, S.; Rahmati, A.; Fernandes, E.; Mao, Z.M.; Prakash, A.; Unviersity, S. ContexloT: Towards Providing Contextual Integrity to Appified IoT Platforms. In Proceedings of the NDSS, San Diego, CA, USA, 26 February–1 March 2017; p. 2. [Google Scholar]
- Wang, Q.; Hassan, W.U.; Bates, A.; Gunter, C. Fear and logging in the internet of things. In Proceedings of the Network and Distributed Systems Symposium, San Diego, CA, USA, 18–21 February 2018. [Google Scholar]
- Babun, L.; Celik, Z.B.; McDaniel, P.; Uluagac, A.S. Real-time analysis of privacy-(un) aware IoT applications. arXiv 2019, arXiv:1911.10461. [Google Scholar] [CrossRef]
- Ernst, M.D. Static and Dynamic Analysis: Synergy and Duality; MIT Computer Science & Artificial Intelligence Lab: Cambridge, MA, USA, 2003. [Google Scholar]
- de Moura, L.; Bjørner, N. Z3: An Efficient SMT Solver. In TACAS; Ramakrishnan, C.R., Rehof, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 337–340. [Google Scholar]
- Cavada, R.; Cimatti, A.; Dorigatti, M.; Griggio, A.; Mariotti, A.; Micheli, A.; Mover, S.; Roveri, M.; Tonetta, S. The nuXmv symbolic model checker. In Proceedings of the 26th International Conference on Computer Aided Verification, Vienna, Austria, 18–22 July 2014; pp. 334–342. [Google Scholar]
- Ansótegui, C.; Bonet, M.L.; Levy, J. A new algorithm for weighted partial MaxSAT. In Proceedings of the Twenty-Fourth AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 1 December 2009–18 January 2010. [Google Scholar]
- Hoos, H.; Sttzle, T. Stochastic Local Search: Foundations and Applications; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2004. [Google Scholar]
- MAXSAT 2020. Available online: https://maxsat-evaluations.github.io/2020/ (accessed on 10 July 2020).
- Bianchi, L.; Dorigo, M.; Gambardella, L.M.; Gutjahr, W.J. A survey on metaheuristics for stochastic combinatorial optimization. Nat. Comput. 2009, 8, 239–287. [Google Scholar] [CrossRef]
- Tolson, B.; Shoemaker, C. Dynamically dimensioned search algorithm for computationally efficient watershed model calibration. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Arsenault, R.; Poulin, A.; Côté, P.; Brissette, F. Comparison of stochastic optimization algorithms in hydrological model calibration. J. Hydrol. Eng. 2014, 19, 1374–1384. [Google Scholar] [CrossRef]
- Mohammadi, N.; Sondur, S.; Kant, K. Effective Configuration Optimization of Large Scale Software Systems. 2022. Available online: https://www.kkant.net/papers/ICFEC_2022_Effective_Configuration_Optimization_of_Data_Center_Services.pdf (accessed on 10 July 2020).
- Mezura-Montes, E.; Coello, C. Constraint-handling in nature-inspired numerical optimization: Past, present and future. Swarm Evol. Comput. 2011, 1, 173–194. [Google Scholar] [CrossRef]
- Riera, B.; Emprin, F.; Annebicque, D.; Colas, M.; Vigario, B. HOME I/O: A virtual house for control and STEM education from middle schools to Universities. IFAC-Papers OnLine 2016, 49, 168–173. [Google Scholar] [CrossRef]
- Pradeep, P.; Kant, K.; Pal, A. Managing Access Control in Large-Scale Multi-Party IoT Systems. In Proceedings of the IEEE/ACM International Symposium on Cluster, Cloud and Internet Computing (CCGrid 2022), Taormina, Sicily, Italy, 16–19 May 2022. [Google Scholar]
- Ouaddah, A.; Abou Elkalam, A.; Ouahman, A.A. Towards a novel privacy-preserving access control model based on blockchain technology in IoT. In Europe and MENA Cooperation Advances in Information and Communication Technologies; Springer: Cham, Switzerland, 2017; pp. 523–533. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Meaning |
|---|---|
| ORs | Operational Rules |
| SPs | Safety Properties |
| ECA | Event Trigger Action |
| IFTTT | If This Then That |
| HNS | Home Network Systems |
| NLP | Natural Language Processing |
| FSM | Finite State Machine |
| SMT | Satisfiability Modulo Theories |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradeep, P.; Kant, K. Conflict Detection and Resolution in IoT Systems: A Survey. IoT 2022, 3, 191-218. https://doi.org/10.3390/iot3010012
Pradeep P, Kant K. Conflict Detection and Resolution in IoT Systems: A Survey. IoT. 2022; 3(1):191-218. https://doi.org/10.3390/iot3010012
Chicago/Turabian StylePradeep, Pavana, and Krishna Kant. 2022. "Conflict Detection and Resolution in IoT Systems: A Survey" IoT 3, no. 1: 191-218. https://doi.org/10.3390/iot3010012
APA StylePradeep, P., & Kant, K. (2022). Conflict Detection and Resolution in IoT Systems: A Survey. IoT, 3(1), 191-218. https://doi.org/10.3390/iot3010012