Author Contributions
Conceptualization, M.C. and B.Q.; methodology, M.C., B.Q. and R.-A.K.; software, M.C.; validation, M.C., B.Q. and R.-A.K.; formal analysis, M.C., B.Q. and R.-A.K.; investigation, M.C. and B.Q.; resources, B.Q.; writing—original draft preparation, M.C., B.Q.; writing—review and editing, M.C., B.Q. and R.-A.K.; visualization, M.C., B.Q. and R.-A.K.; supervision, B.Q.; funding acquisition, B.Q. All authors have read and agreed to the published version of the manuscript.
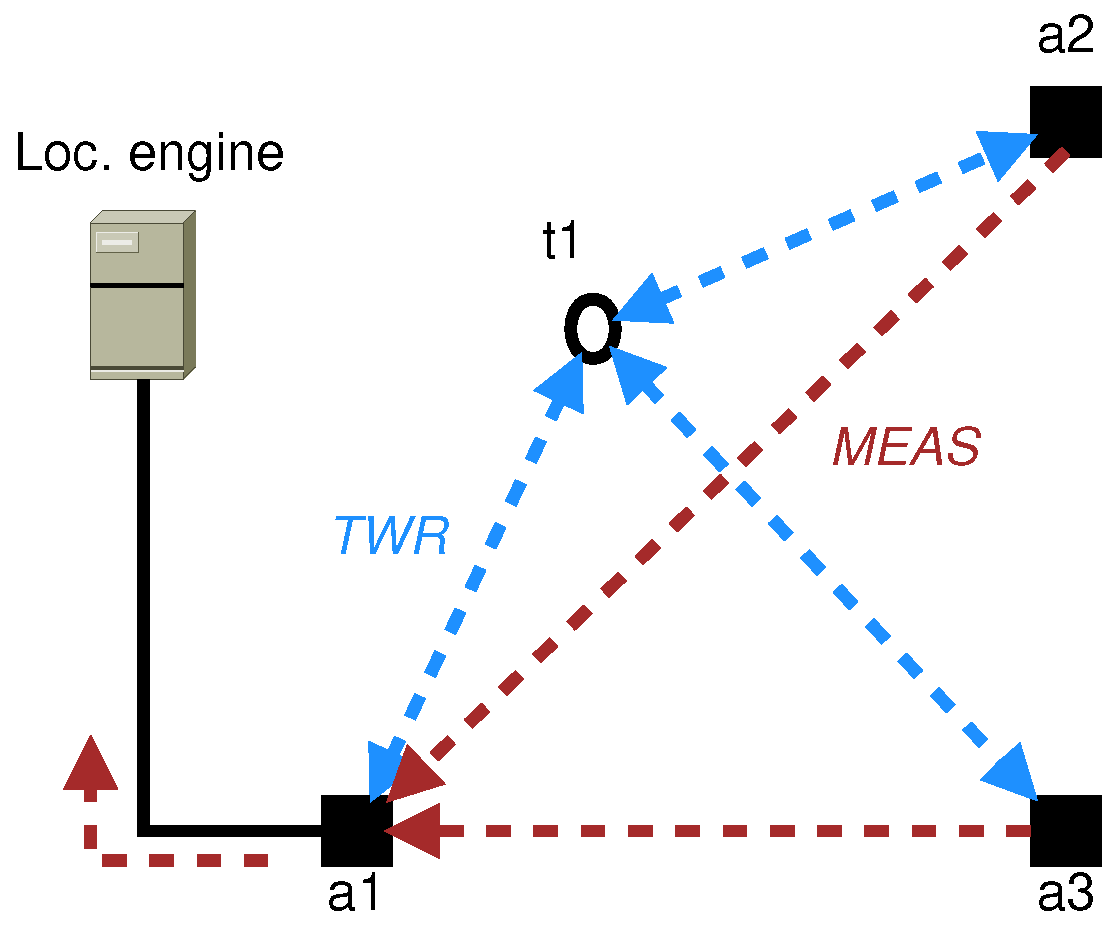
Figure 1.
Positioning system composed of a single cell that contains 3 anchors.
Figure 1.
Positioning system composed of a single cell that contains 3 anchors.
Figure 2.
Principles of single-sided two-way ranging (SS-TWR) and double-sided two-way ranging (DS-TWR) protocols. Messages are composed of a preamble (orange) and payload (blue). A timestamp is associated to the end of the preamble. Times , and are measured with node u’s clock reference.
Figure 2.
Principles of single-sided two-way ranging (SS-TWR) and double-sided two-way ranging (DS-TWR) protocols. Messages are composed of a preamble (orange) and payload (blue). A timestamp is associated to the end of the preamble. Times , and are measured with node u’s clock reference.
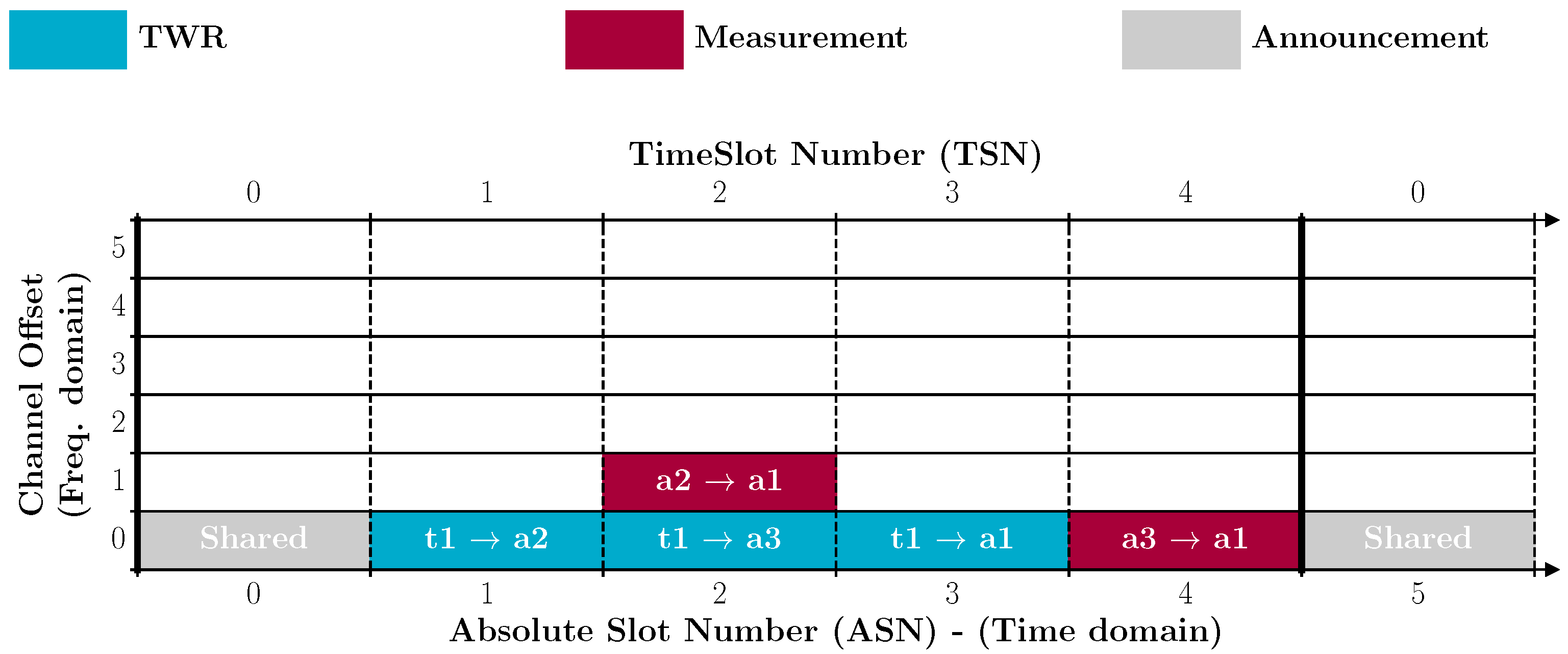
Figure 3.
Schedule corresponding to the example of
Figure 1. The slotframe contains 5 timeslots and repeats over time.
Figure 3.
Schedule corresponding to the example of
Figure 1. The slotframe contains 5 timeslots and repeats over time.
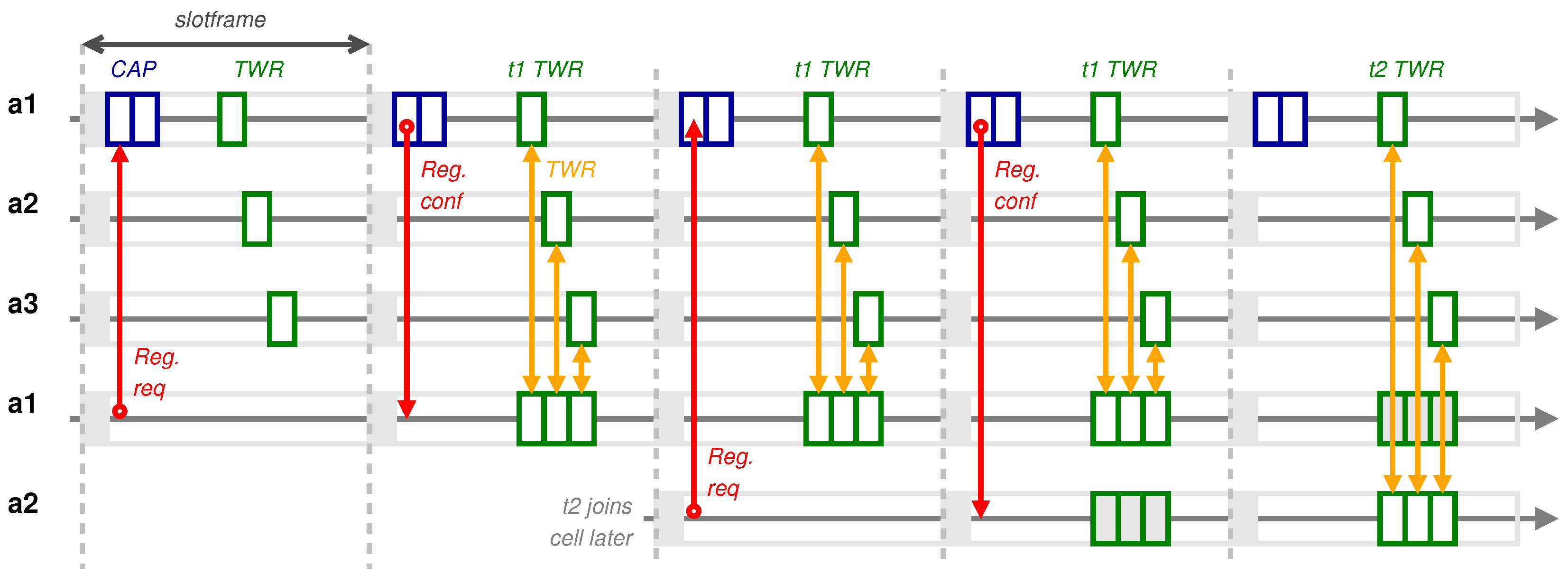
Figure 4.
Dynamic registration to a cell provisioned with a 2-timeslots CAP and a single reserved tag, without the need for re-scheduling UWB-TSCH communications.
Figure 4.
Dynamic registration to a cell provisioned with a 2-timeslots CAP and a single reserved tag, without the need for re-scheduling UWB-TSCH communications.
Figure 5.
Structure of an ADS-TWR timeslot for 3 different nominal bitrates supported by the Decawave DW1000 transceiver. Node A is the initiator of the TWR exchange, typically an anchor, and B is the responder, typically a tag.
Figure 5.
Structure of an ADS-TWR timeslot for 3 different nominal bitrates supported by the Decawave DW1000 transceiver. Node A is the initiator of the TWR exchange, typically an anchor, and B is the responder, typically a tag.
Figure 6.
Structure of a ranging frame.
Figure 6.
Structure of a ranging frame.
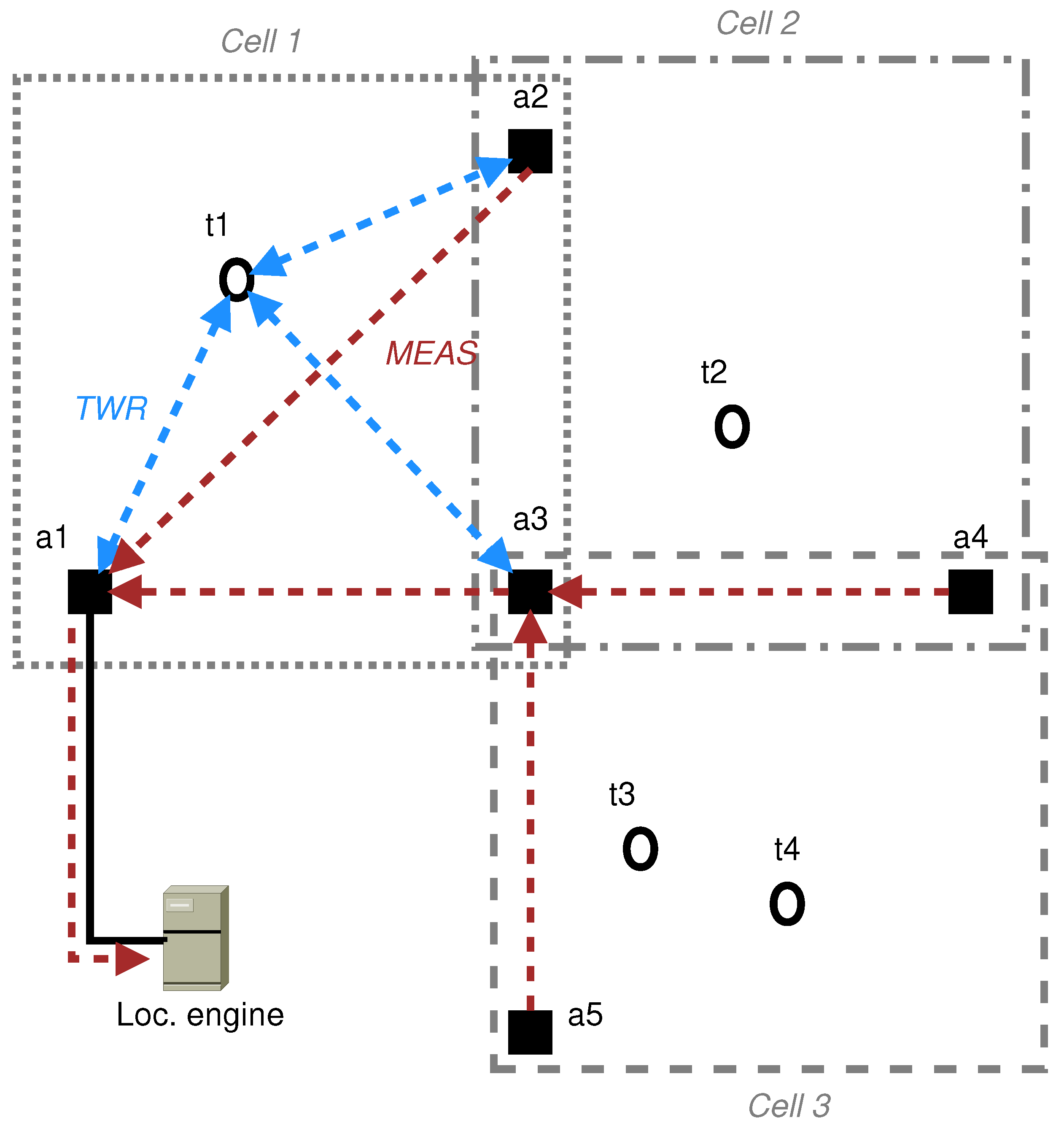
Figure 7.
Multi-cell positioning system.
Figure 7.
Multi-cell positioning system.
Figure 8.
Routing graph .
Figure 8.
Routing graph .
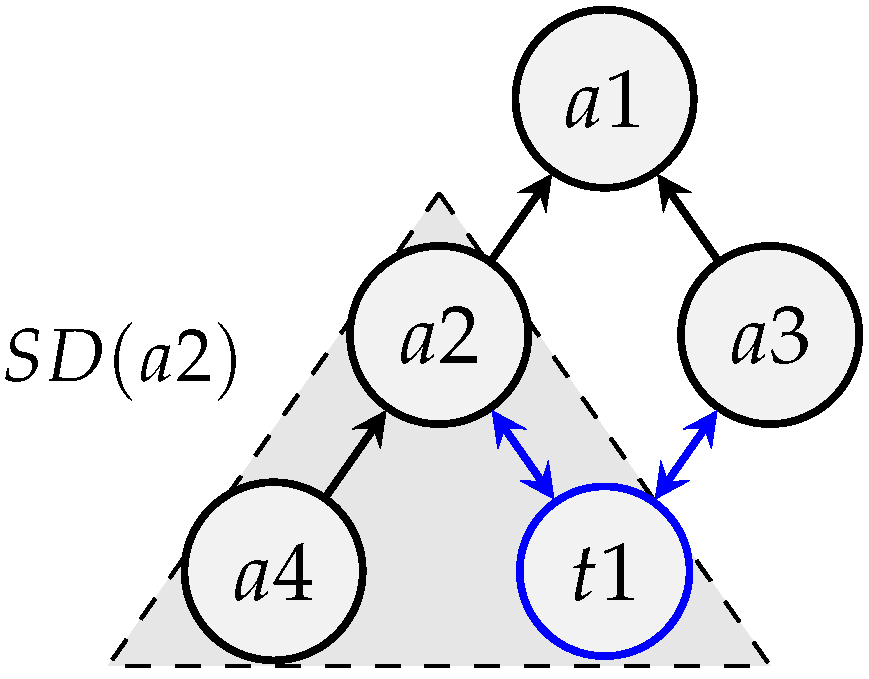
Figure 9.
Augmented interference graph for reserved tag t1.
Figure 9.
Augmented interference graph for reserved tag t1.
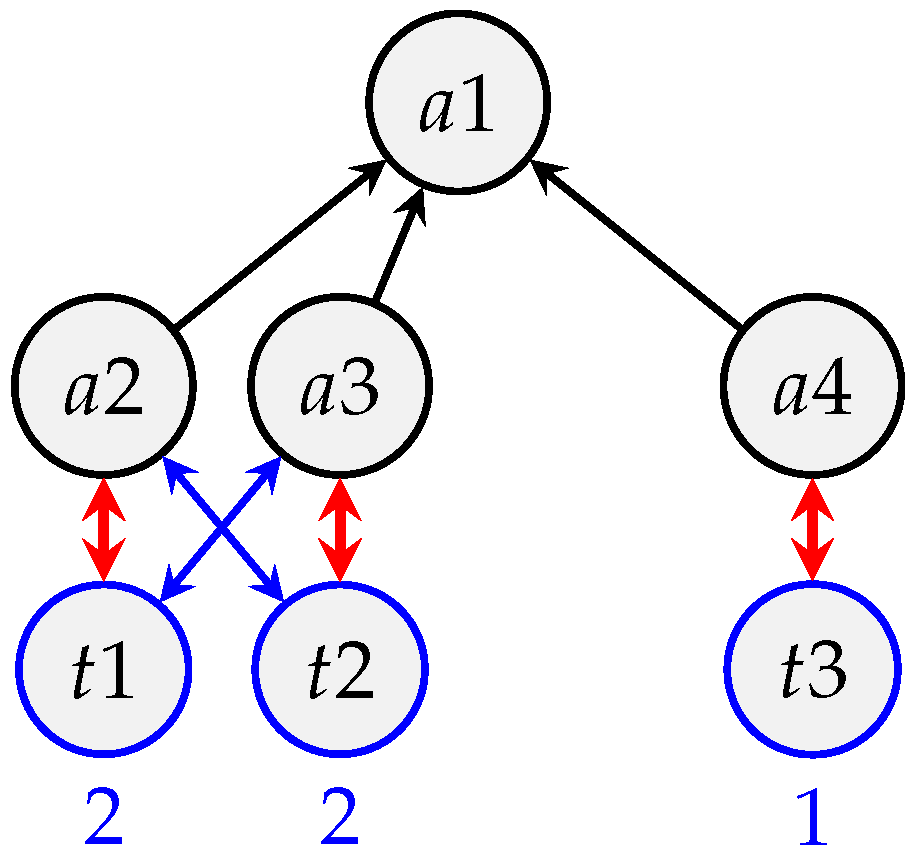
Figure 10.
Evolution of queue depth from to during timeslot k. The communication that occurs during timeslot k is shown with a very thick edge. Blue nodes are reserved tags and blue edges are ranging exchanges.
Figure 10.
Evolution of queue depth from to during timeslot k. The communication that occurs during timeslot k is shown with a very thick edge. Blue nodes are reserved tags and blue edges are ranging exchanges.
Figure 11.
Routing graph .
Figure 11.
Routing graph .
Figure 12.
One transceiver cannot be involved in multiple communications within the same timeslot. (a) Simultaneous transmission to the same parent. (b) Simultaneous reception and transmission.
Figure 12.
One transceiver cannot be involved in multiple communications within the same timeslot. (a) Simultaneous transmission to the same parent. (b) Simultaneous reception and transmission.
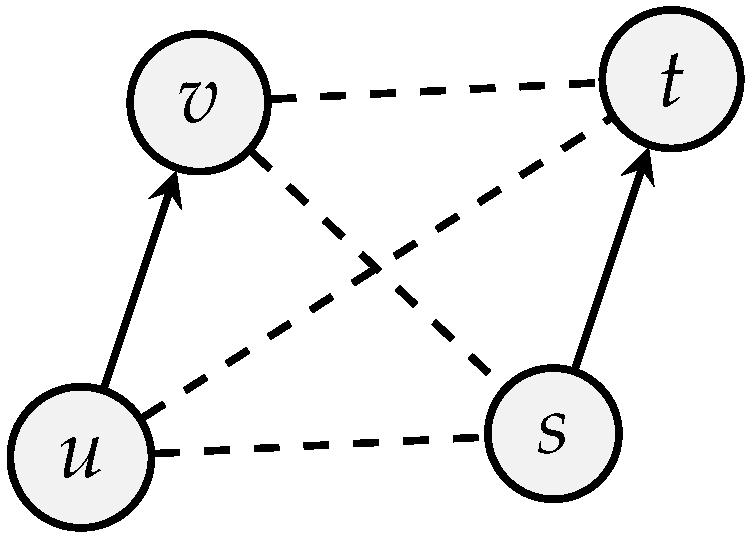
Figure 13.
Two communication and cannot be scheduled on the same channel/code if there is any edge in between a pair of vertices each taken from a different communication (dashed lines).
Figure 13.
Two communication and cannot be scheduled on the same channel/code if there is any edge in between a pair of vertices each taken from a different communication (dashed lines).
Figure 14.
Routing graph .
Figure 14.
Routing graph .
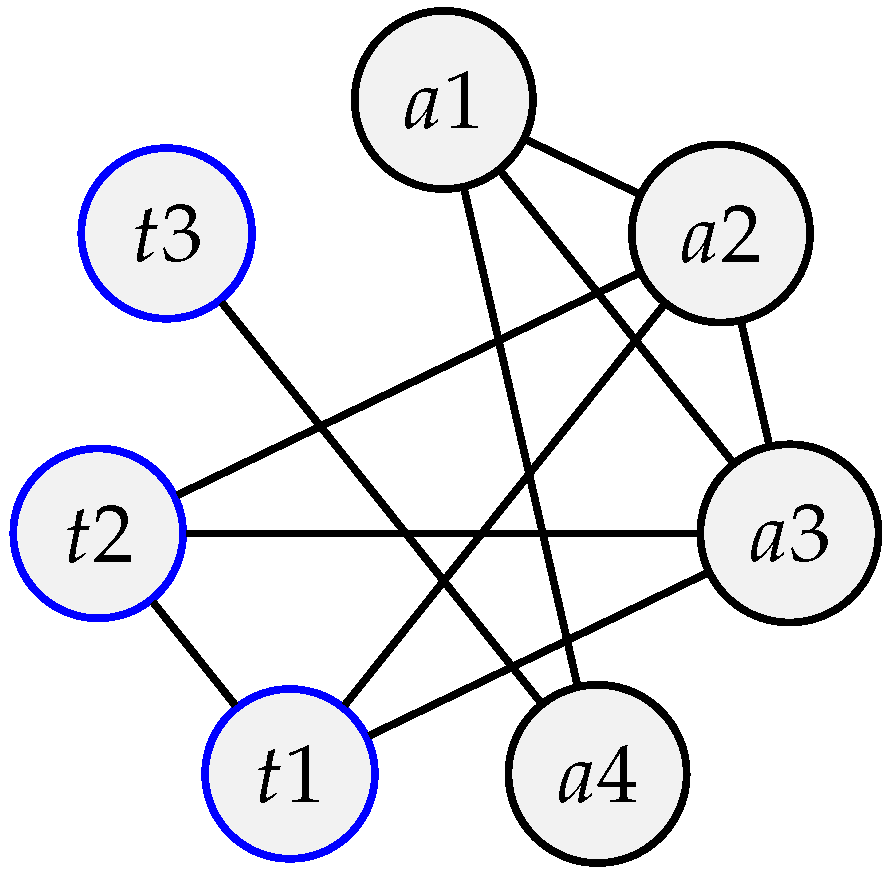
Figure 15.
Interference graph .
Figure 15.
Interference graph .
Figure 16.
Conflict graph .
Figure 16.
Conflict graph .
Figure 17.
The UDG model used in the simulator. The green circle of radius models the communication range, while the red circle of radius models the interference range.
Figure 17.
The UDG model used in the simulator. The green circle of radius models the communication range, while the red circle of radius models the interference range.
Figure 18.
Illustration of the grid topology generation process. In this example, the following radii are used: 0, 0.71, 1.59, 2.13 and 2.55.
Figure 18.
Illustration of the grid topology generation process. In this example, the following radii are used: 0, 0.71, 1.59, 2.13 and 2.55.
Figure 19.
Number of transmissions as a function of the network size. The differences in network sizes between the two sink placements can be attributed to the expansion process explained in
Section 6.2.
Figure 19.
Number of transmissions as a function of the network size. The differences in network sizes between the two sink placements can be attributed to the expansion process explained in
Section 6.2.
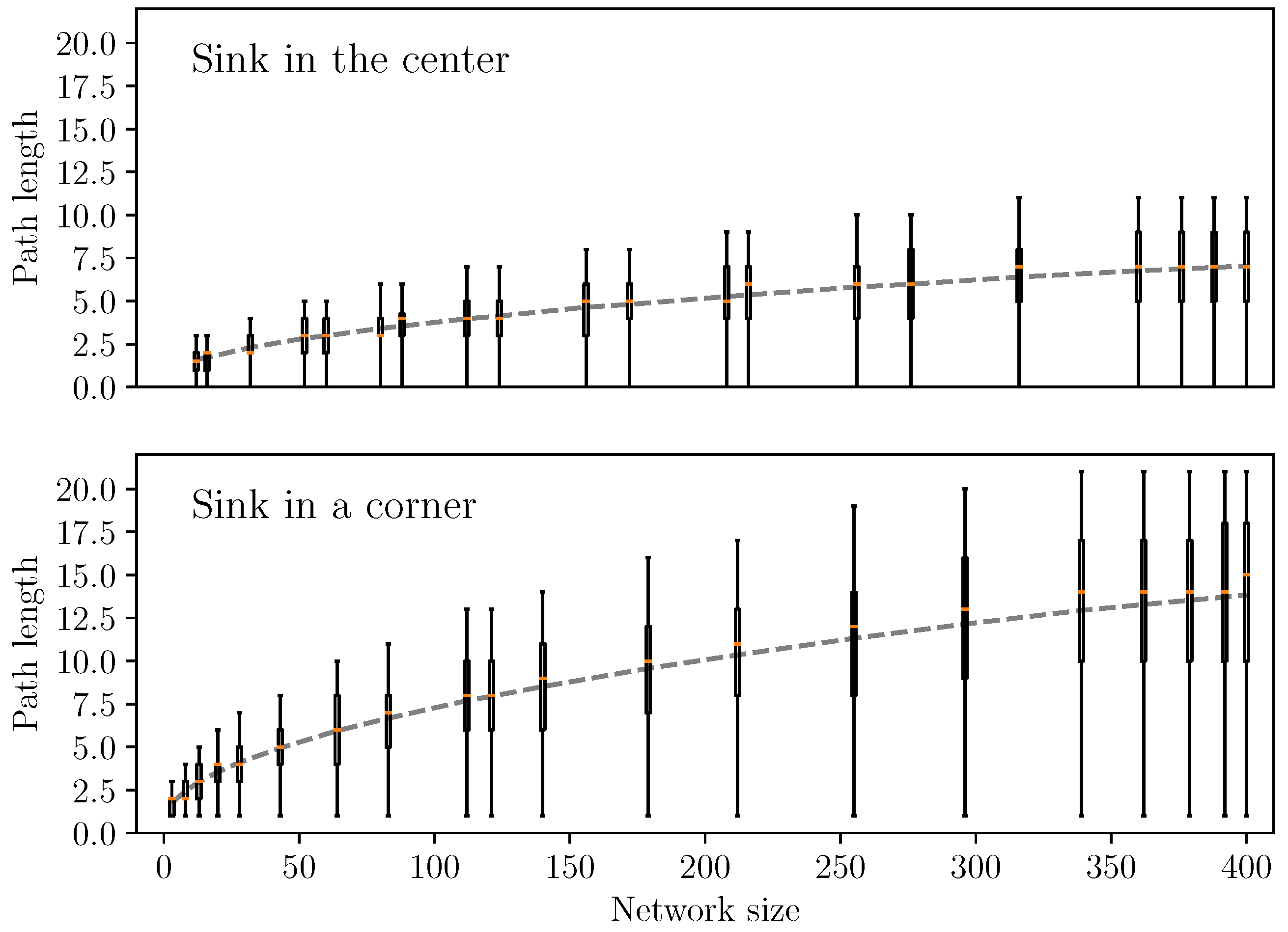
Figure 20.
Path length to the sink for each node according to the network size. The dashed curve shows the mean path length.
Figure 20.
Path length to the sink for each node according to the network size. The dashed curve shows the mean path length.
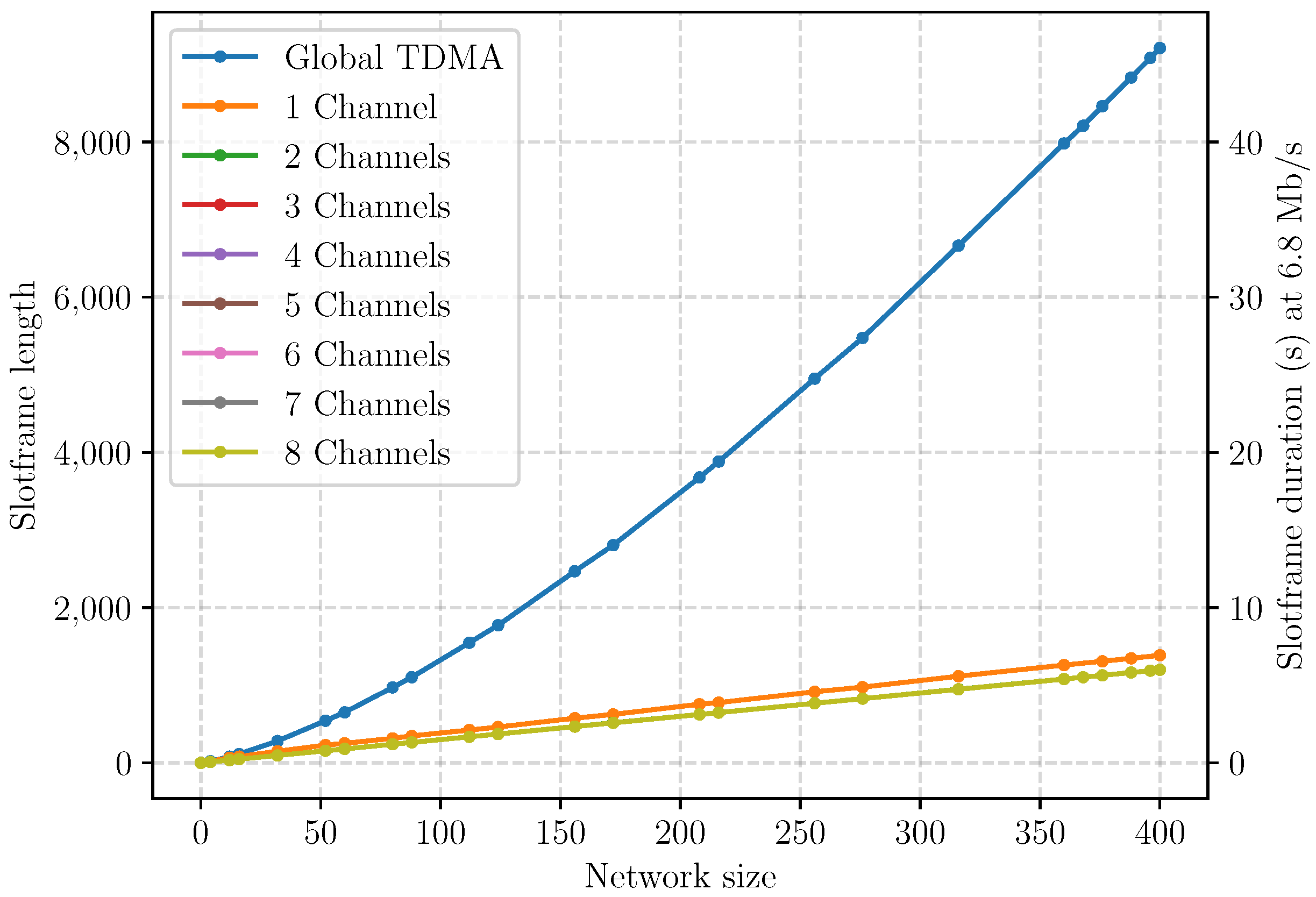
Figure 21.
Slotframe length as a function of the network size and the number of allowed channels.
Figure 21.
Slotframe length as a function of the network size and the number of allowed channels.
Figure 22.
Number of transmissions per timeslot and maximum number of transmissions per channel and timeslot. Note the split x-axis and different x-axis scales.
Figure 22.
Number of transmissions per timeslot and maximum number of transmissions per channel and timeslot. Note the split x-axis and different x-axis scales.
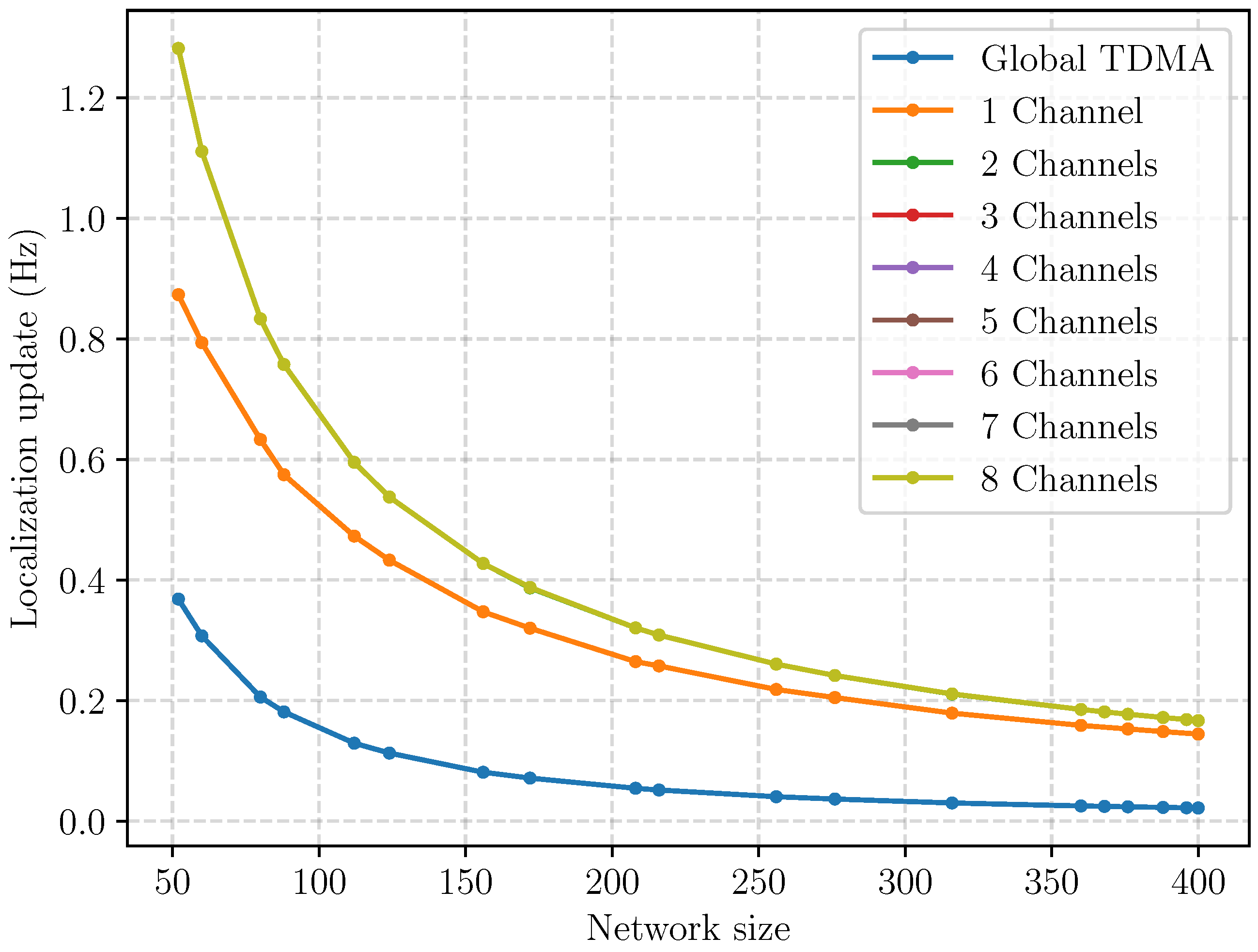
Figure 23.
Frequency of position update according to the number of channels at 6.8 Mb/s.
Figure 23.
Frequency of position update according to the number of channels at 6.8 Mb/s.
Figure 24.
Slotframe length and mean concurrent channel usages according to the interference range and the size of the network. tsch is configured with 8 channels.
Figure 24.
Slotframe length and mean concurrent channel usages according to the interference range and the size of the network. tsch is configured with 8 channels.
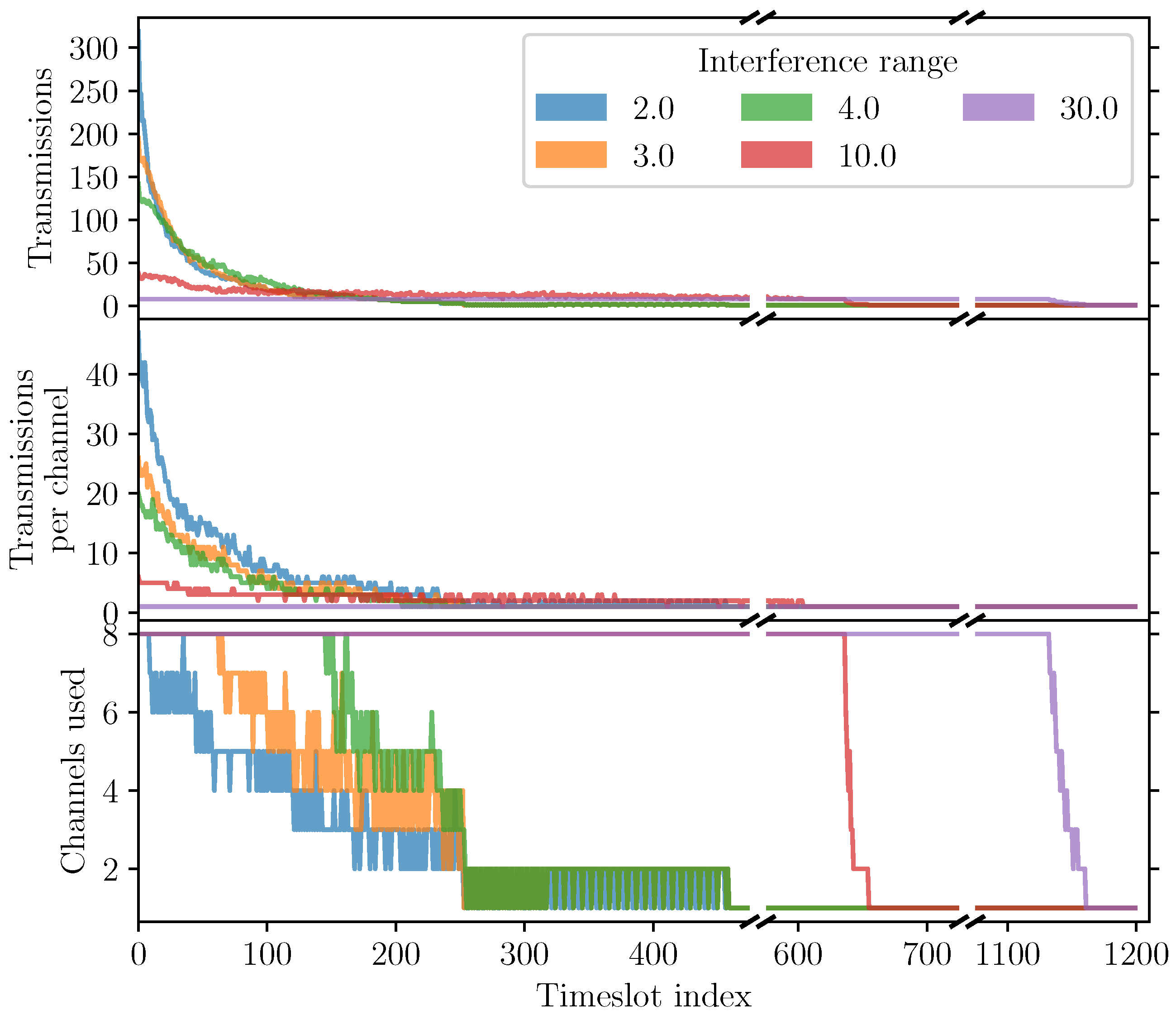
Figure 25.
Distribution of concurrent communications over the slotframe for different interference ranges. UWB-TSCH is configured with 8 channels. Note the split x-axis.
Figure 25.
Distribution of concurrent communications over the slotframe for different interference ranges. UWB-TSCH is configured with 8 channels. Note the split x-axis.
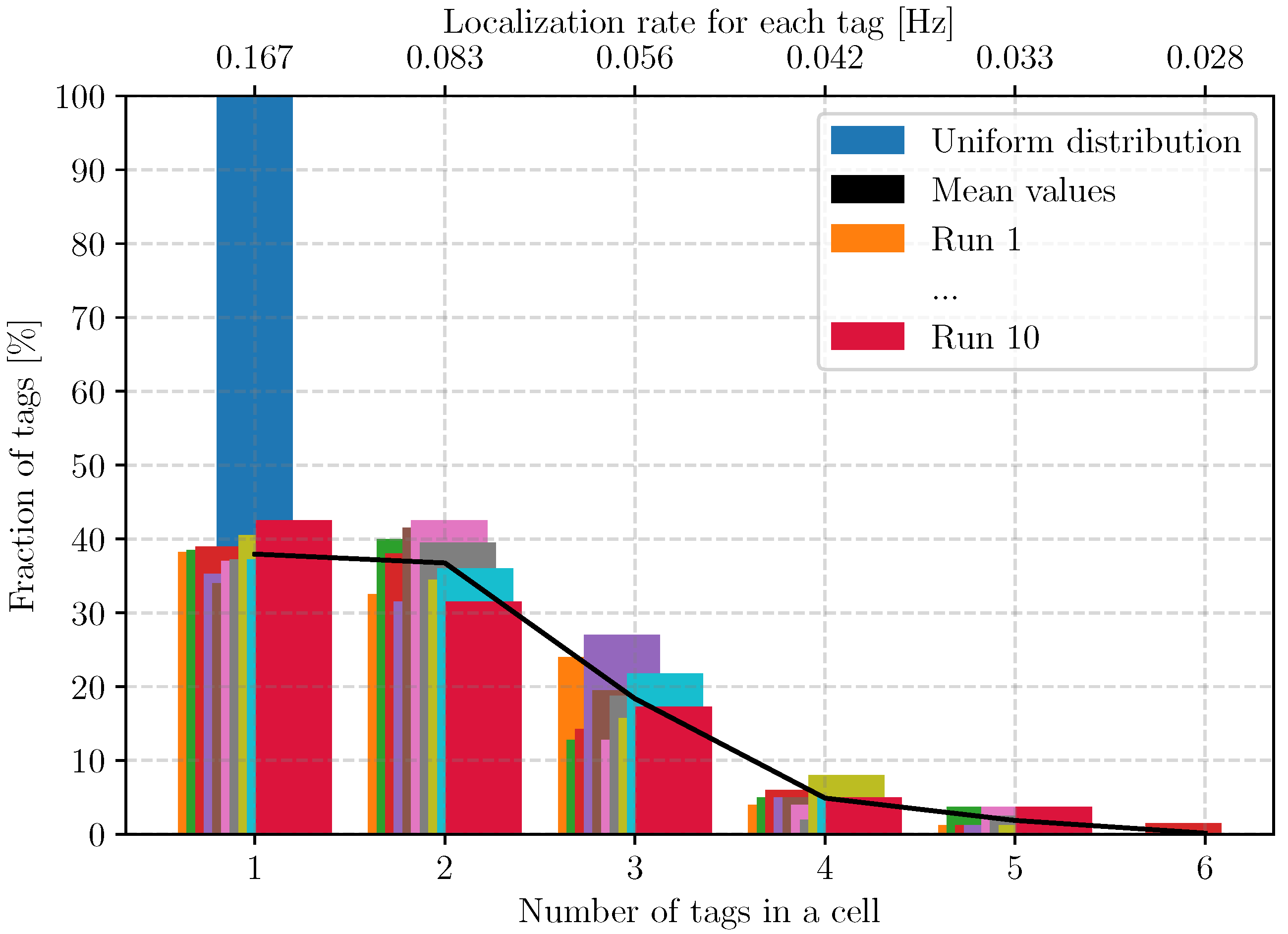
Figure 26.
Distribution of in cells and at the same time distribution of the achieved positioning rate.
Figure 26.
Distribution of in cells and at the same time distribution of the achieved positioning rate.
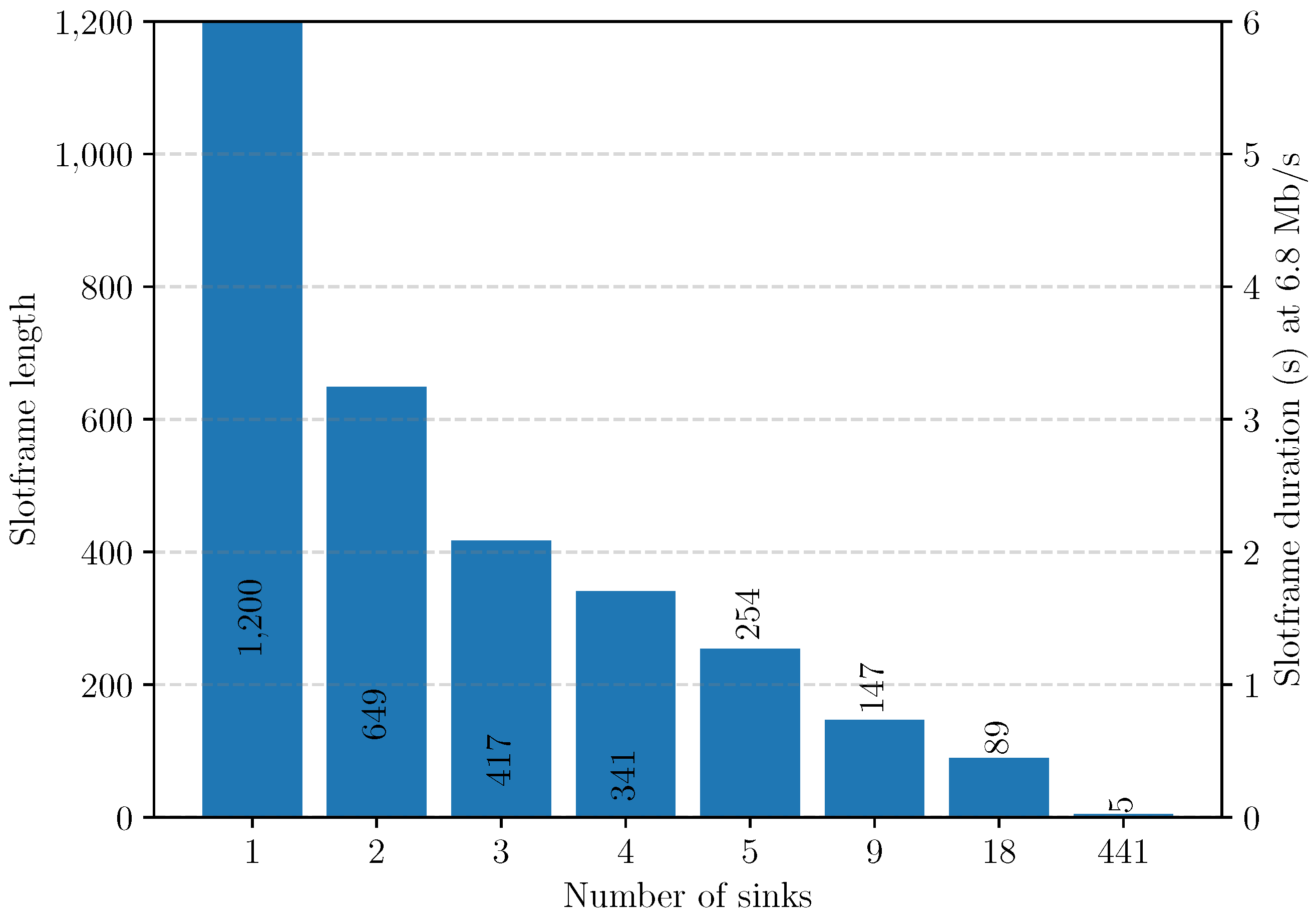
Figure 27.
Slotframe length as a function of the number of sinks. Scenarios with a 400 cells network, using 8 channels.
Figure 27.
Slotframe length as a function of the number of sinks. Scenarios with a 400 cells network, using 8 channels.
Figure 28.
Structure of a ranging frame showing space left for aggregation of multiple measurements.
Figure 28.
Structure of a ranging frame showing space left for aggregation of multiple measurements.
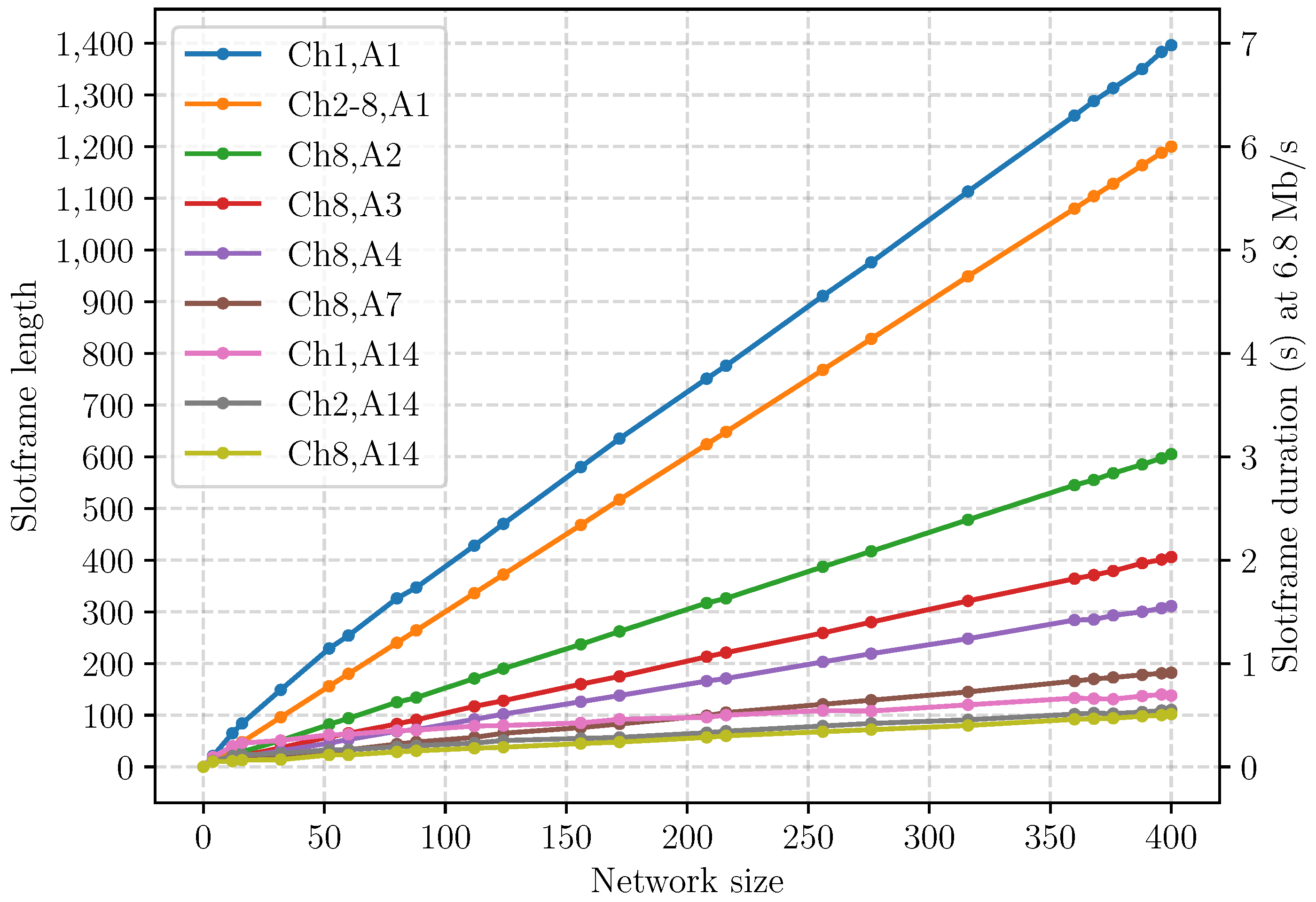
Figure 29.
Slotframe length as a function of network size (in cells) in different aggregation scenarios. Each scenario is named Chm,An with m the number of channels and n the amount of aggregation.
Figure 29.
Slotframe length as a function of network size (in cells) in different aggregation scenarios. Each scenario is named Chm,An with m the number of channels and n the amount of aggregation.
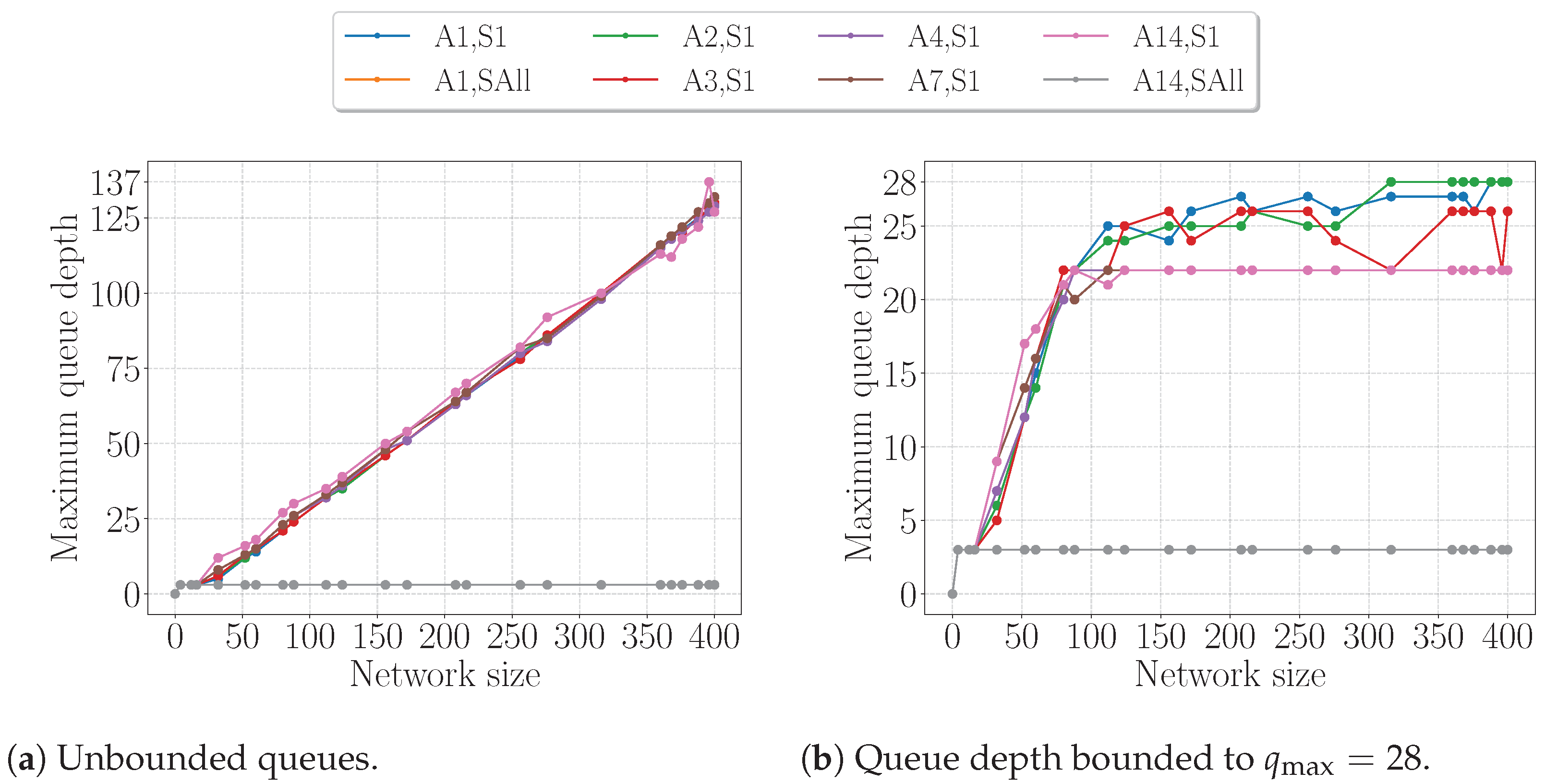
Figure 30.
Maximum queue depth observed during slotframe execution. UWB-TSCH is configured with 8 channels. Each scenario is named Am,Sn where m is the aggregation level, nagg, and m the number of sinks.
Figure 30.
Maximum queue depth observed during slotframe execution. UWB-TSCH is configured with 8 channels. Each scenario is named Am,Sn where m is the aggregation level, nagg, and m the number of sinks.
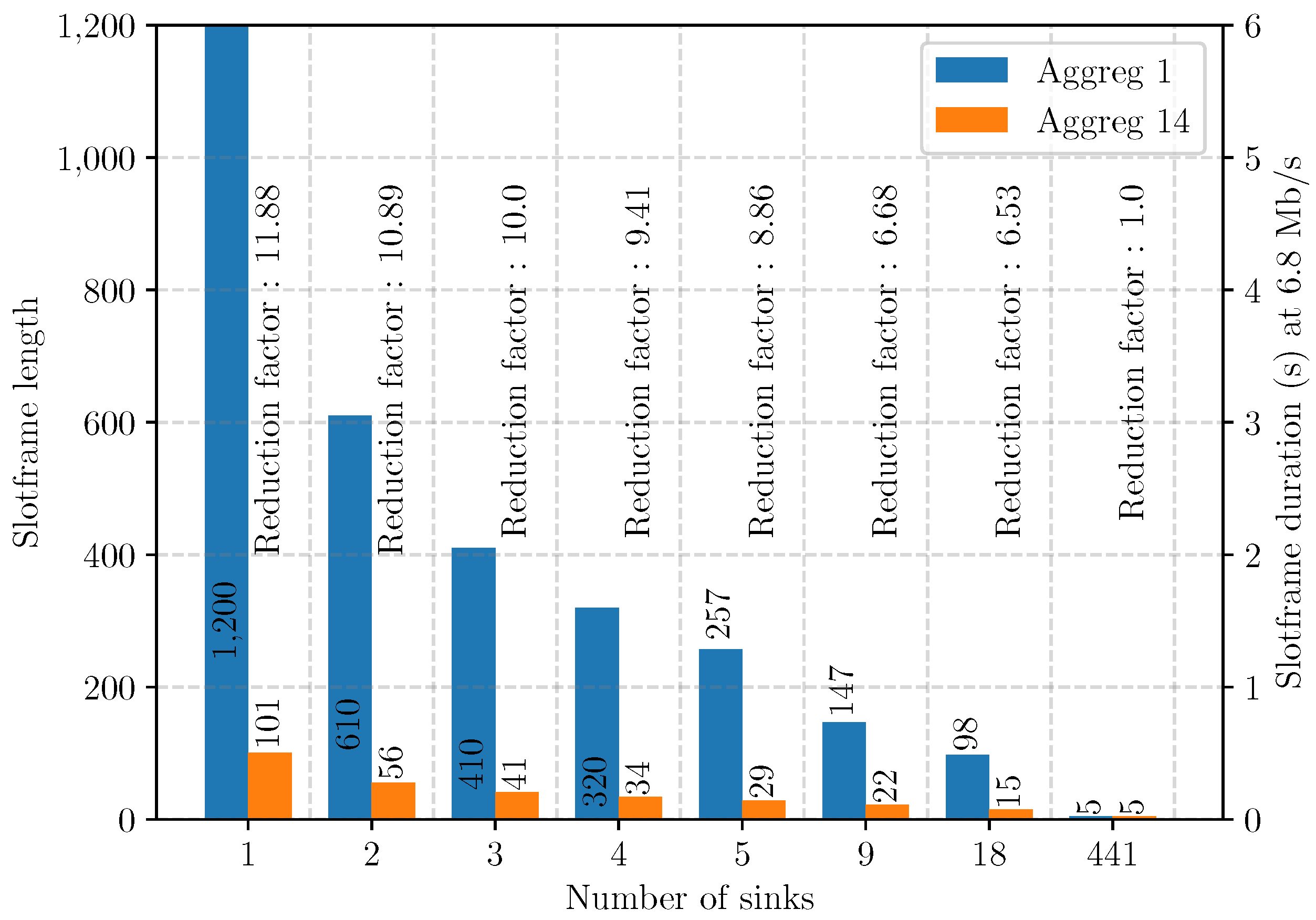
Figure 31.
Slotframe length as a function of the number of sinks with either no aggregation (nagg = 1) or maximal aggregation level (nagg = 14). The network contains 400 cells and the schedule can make use of up to 8 channels.
Figure 31.
Slotframe length as a function of the number of sinks with either no aggregation (nagg = 1) or maximal aggregation level (nagg = 14). The network contains 400 cells and the schedule can make use of up to 8 channels.
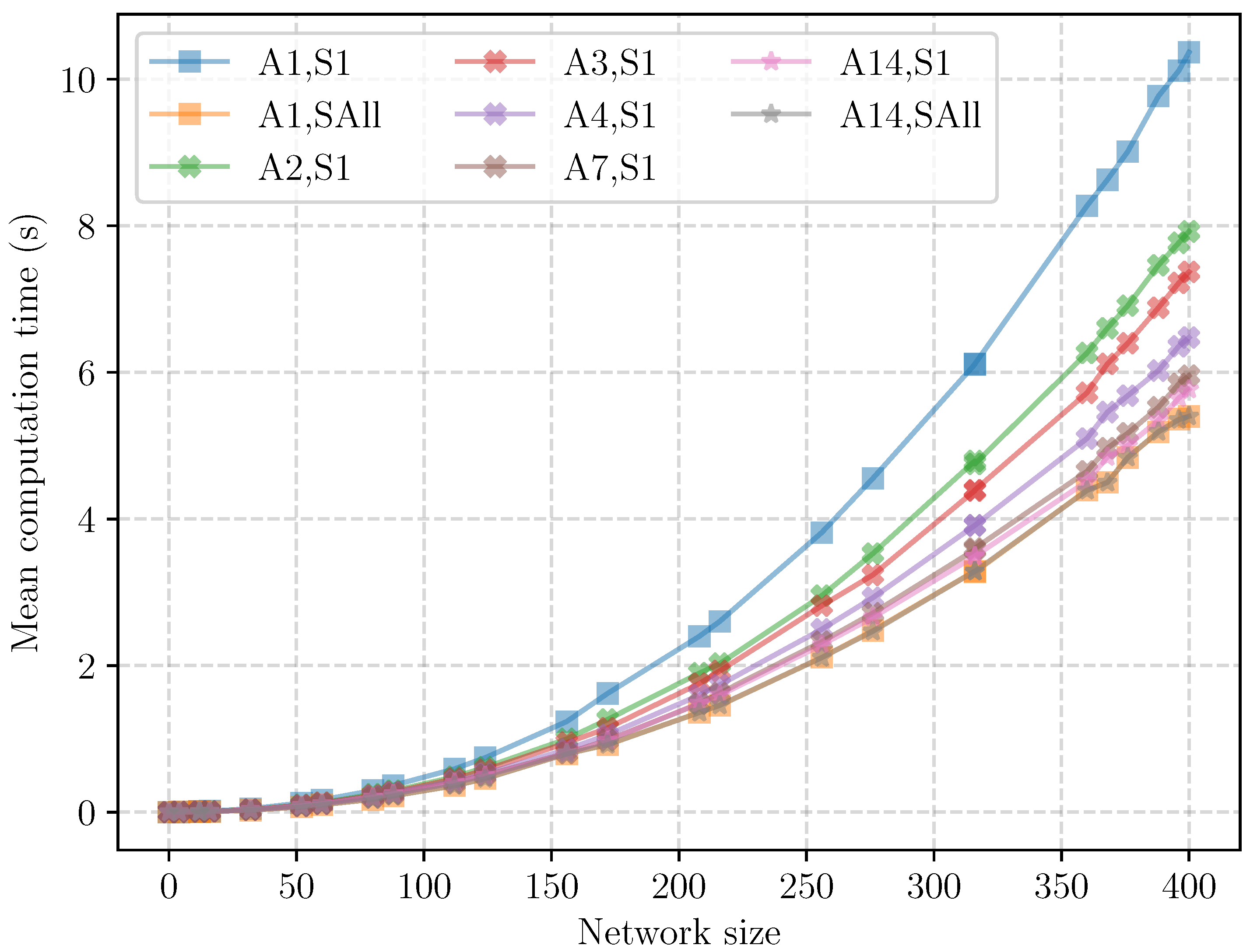
Figure 32.
Mean schedule computation time for different network sizes and scenarios using up to 8 channels, aggregation, and either a single sink or all anchors as sink.
Figure 32.
Mean schedule computation time for different network sizes and scenarios using up to 8 channels, aggregation, and either a single sink or all anchors as sink.
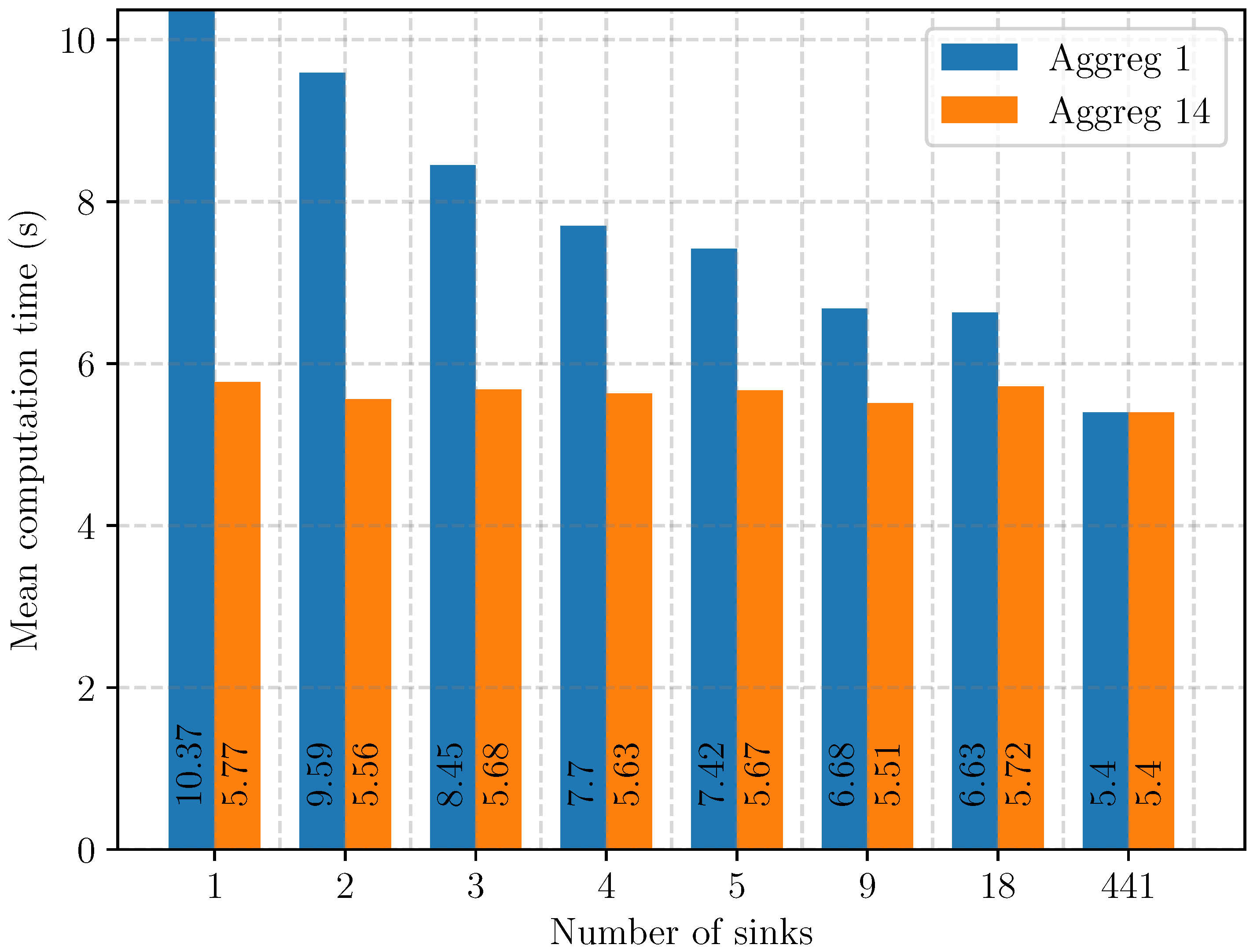
Figure 33.
Mean schedule computation time for scenarios with up to 8 channels, multiple sinks and no of maximum aggregation in a 400 cells network.
Figure 33.
Mean schedule computation time for scenarios with up to 8 channels, multiple sinks and no of maximum aggregation in a 400 cells network.
Table 1.
Channels used in UWB-TSCH. All of them can be used concurrently as they use either different frequencies or different orthogonal preamble codes and pulse repetition frequency (PRF).
Table 1.
Channels used in UWB-TSCH. All of them can be used concurrently as they use either different frequencies or different orthogonal preamble codes and pulse repetition frequency (PRF).
| Channels | Frequency | PRF | Index of |
|---|
| UWB-TSCH | UWB | (MHz) | (MHz) | Preamble Code |
|---|
| 0 | 1 | 3494.4 | 15.6 | 1 |
| 1 | 2 | 3993.6 | 15.6 | 3 |
| 2 | 3 | 4492.8 | 15.6 | 5 |
| 3 | 5 | 6489.6 | 15.6 | 3 |
| 4 | 1 | 3494.4 | 62.4 | 12 |
| 5 | 2 | 3993.6 | 62.4 | 9 |
| 6 | 3 | 4492.8 | 62.4 | 9 |
| 7 | 5 | 6489.6 | 62.4 | 9 |
Table 2.
TWR timeslot parameters.
Table 2.
TWR timeslot parameters.
| Bit-Rate | Preamble | Duration |
|---|
| (kbps) | (Symbols) | (ms) |
|---|
| 110 | 1048 | 25 |
| 850 | 512 | 7.5 |
| 6800 | 128 | 5 |
Table 3.
Summary of mathematical notations.
Table 3.
Summary of mathematical notations.
| Notation | Description |
|---|
| Set of anchors. |
| Set of reserved tags. |
| Set of cells. |
| Set of cells to which node belongs. |
| Number of reserved tags in cell c. |
| Directed acyclic graph, routing in the network. |
| Set of nodes of the network. |
| Set of edges, edges to routing parents. |
| Set of anchors of reserved tag . |
| Set of edges in the sub-DAG of node u. |
| Undirected graph, interference between nodes. |
| Set of edges, interference between nodes. |
| Undirected graph, augmented interference between nodes. |
| Set of edges, augmented interference between nodes. |
| Number of available channels. |
| Number of messages queued at u at the beginning of timeslot k. |
| Number of messages queued at u for next-hop/anchor v at the beginning of timeslot k. |
| Number of messages queued at and below u at the beginning of timeslot k. |
| Matching of graph , set of edges without common vertice. |
| Graph of conflicting edges. |
| Coloring of graph . |
| List of conflicting nodes (used during coloring). |
| List of non-conflicting nodes (used during coloring). |
Table 4.
A possible slotframe for the example network of
Figure 11. Updated value are in red and final value in green.
Table 4.
A possible slotframe for the example network of
Figure 11. Updated value are in red and final value in green.
| Slotframe | TWR
| TWR
| DATA
| DATA
| MEAS
| MEAS
| MEAS
|
| k | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| 0 | 0 | 0 | 0 | 1 | 2 | 3 |
| 0 | 1 | 1 | 2 | 1 | 1 | 0 |
| 0 | 0 | 1 | 1 | 1 | 0 | 0 |
| 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 | 0 | 0 | 0 |
Table 5.
Global and local traffic loads.
Table 5.
Global and local traffic loads.
| | | |
|---|
| a1 | 0 | 5 |
| a2 | 0 | 2 |
| a3 | 0 | 2 |
| a4 | 0 | 1 |
| t1 | 1+1 | 2 |
| t2 | 1+1 | 2 |
| t3 | 1 | 1 |
Table 6.
Steps of the matching heuristic applied to the routing graph in
Figure 16.
Table 6.
Steps of the matching heuristic applied to the routing graph in
Figure 16.
| Iteration | | Edge | Action |
|---|
|
1 | a2 | (a2,a1) | nothing to send (i.e., ) |
| 2 | t1 | (t1,a2) | add to |
| 3 | t2 | (t2,a2) | transceiver conflict on a2 |
| 4 | a3 | (a3,a1) | nothing to send |
| 5 | t1 | (t1,a3) | transceiver conflict on t1 |
| 6 | t2 | (t2,a3) | add to |
| 7 | a4 | (a4,a1) | nothing to send |
| 8 | t3 | (t3,a4) | add to |
Table 7.
Steps of the coloring heuristic applied on the conflict graph shown in
Figure 16.
Table 7.
Steps of the coloring heuristic applied on the conflict graph shown in
Figure 16.
| Iteration | Sconflict | Sno_conflict | | C |
|---|
| 1 | | | a1 | [{a1}] |
| 2 | | | a4 | [{a1,a4}] |
| 3 | | | a2 | [{a1,a4},{a2}] |
| 4 | | | a5 | [{a1,a4},{a2,a5}] |
| 5 | | | a3 | [{a1,a4},{a2,a5},{a3}] |
Table 8.
Summary of slotframe length experimental scenarios.
Table 8.
Summary of slotframe length experimental scenarios.
| Scenario | | | | Spatial Multiplexing |
|---|
| Global TDMA | 1 | 2 | 1 | disabled |
| n Channel(s) | 1 | 2 | n | enabled |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}