Abstract
The use of unmanned aerial vehicles (UAVs) can significantly assist landslide detection and characterization in different geological contexts at a detailed scale. This study investigated the role of UAVs in detecting a first-failure landslide occurring in Calabria, South Italy, and involving weathered granitoid rocks. After the landslide event, which caused the interruption of State Road 107, a UAV flight was carried out to identify landslide boundaries and morphological features in areas where there are problems of safe access. The landslide was classified as flow-type, with a total length of 240 m, a maximum width of 70 m, and a maximum depth of about 6.5 m. The comparison of the DTMs generated from UAV data with previously available LIDAR data indicated significant topographic changes across the landslide area. A minimum negative value of −6.3 m suggested material removal at the landslide source area. An approximate value of −2 m in the transportation area signified bed erosion and displacement of material as the landslide moved downslope. A maximum positive value of 4.2 m was found in the deposition area. The landslide volume was estimated to be about 6000 m3. These findings demonstrated the effectiveness of UAVs for landslide detection, showing their potentiality as valuable tools in planning further studies for a detailed landslide characterization and for defining the most appropriate risk mitigation measures.
1. Introduction
Landslides are complex phenomena influenced by multiple factors and posing significant hazards to human life and infrastructures [1]. Understanding the controlling factors and the associated landslide risk is critical for effective management and mitigation strategies [2,3,4].
The integration of unmanned aerial vehicles (UAVs) into landslide studies has provided new paths for detailed analysis, monitoring, and mitigation.
These systems, already used in several areas of specialization, such as agriculture [5,6], disaster prevention and management [7,8] and rescue missions [9,10], are emerging in studies of landslide susceptibility, hazard, and risk zoning [11,12,13,14,15,16,17,18].
Referring to landslide risk analysis, UAVs can be used both in ordinary and emergency conditions [10,11,12,13,16,17,18].
In ordinary conditions, following the framework for landslide risk management proposed by [12] and widely used internationally, risk analysis is a sub-process of risk estimation, which itself is part of risk management. In this framework, UAVs are increasingly significant in enhancing landslide risk analysis and monitoring, and in systematically identifying, evaluating, and mitigating landslide risk [10,19,20].
Referring to landslide risk analysis—which consists of hazard and consequence analyses—UAV systems equipped with high-resolution cameras or Light Detection and Ranging (LiDAR) capture detailed real-time aerial images that can be used for landslide detection, monitoring, and prediction [11,13,16,21].
Specifically, UAV systems can be used to accurately map the boundaries of a previously occurring landslide, including minor and lateral scarps and upslope deformations such as tension cracks [16,22,23]. If at least two UAV flights (one before and the other after the landslide event) are available for the same landslide area, UAVs can be used to estimate the topographic changes as well as to calculate landslide source and depositional volumes useful for landslide triggering and propagation analyses [24,25,26,27]. Moreover, two consecutive flights can provide useful information about soil erosion, entrainment, and deposition, especially in landslide typologies where these complex mechanical processes are dominant.
If UAVs are equipped with multispectral or thermal cameras, they can capture additional information beyond visible images that can be used to reconstruct soil moisture, ground temperature variations, and other elements relevant for identifying landslide predisposing factors [19]. Furthermore, UAV flights can be used to identify the extent of damage to buildings, roads, bridges, and other infrastructures [18,21]. Therefore, the data obtained from these flights help in creating accurate thematic maps useful for landslide hazard analysis and consequent scenario characterization.
Referring to landslide monitoring, UAVs can be used for continuous monitoring of areas affected by existing or potential landslides [13,20]. Periodic flights over the same zone allow UAVs to detect changes in the morphology of the study area and signs of incipient slope instability, providing useful information to support local authorities in early warning systems. UAVs can be used to detect millimetric ground movements if they are equipped with Interferometric Synthetic Aperture Radar (InSAR) sensors.
In landslide emergency conditions, such as disaster situations, UAVs are often equipped with communication systems for real-time transmission of data to ground stations [18]. Recently, UAV systems have been introduced as new methodologies to improve landslide disaster management efficiency [28,29]. This is due to the ability of UAVs to cover large areas in a short period of time, providing live video. This reduces the time required for intervention when victims are located, and provides useful information about the routes rescuers should take [10,30,31].
Additionally, drones equipped with thermal cameras or infrared sensors can be used to search for survivors in areas that are difficult for rescuers to safely reach [20,31].
One of the pioneering applications of drones in landslide emergencies occurred in December 2020, marking Europe’s largest drone operation after a deadly landslide in Norway. Drones, coupled with aircraft, were permitted to fly simultaneously to rescue people trapped in buildings that collapsed due to landslides [20,31].
Regardless of whether ordinary or emergency conditions have to be faced, the integration of UAVs with Geographic Information Systems (GIS), machine learning techniques, and physical models significantly enhances landslide risk management.
This paper describes the use of a UAV equipped with an integrated RGB camera in detecting a landslide that affected a major State Road situated in the municipality of San Giovanni in Fiore, located in Calabria, Southern Italy.
The UAV flight was performed three days after the landslide event, during a time when the landslide-affected area was still inaccessible to field surveys. In this context, the primary objectives of the UAV flight were an accurate detection of landslide features (landslide boundaries, features, kinematic, involved volumes, and geomaterial) and the assessment of landslide potential evolution. Indeed, the UAV data provided a detailed analysis of the landslide, highlighting significant changes in topography from the source to the deposition areas. The substantial removal of material at the source, erosion in the transportation path, and accumulation in the deposition area were quantified, offering valuable insights for understanding the dynamics and impact of the flow-type landslide. This detailed spatial analysis is crucial for landslide risk assessment, mitigation, and planning.
2. Materials and Methods
2.1. Study Area and Landslide Event
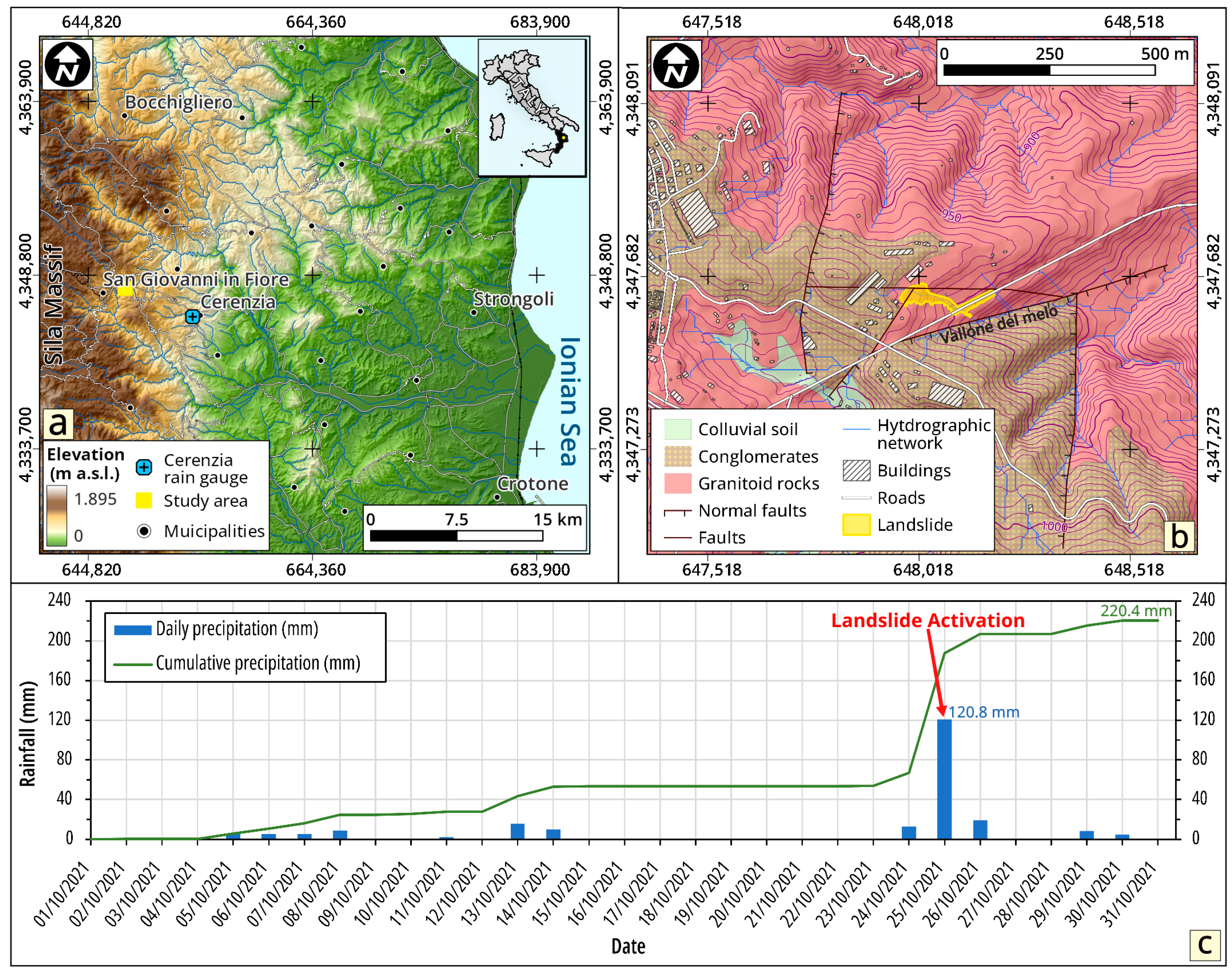
The study area is located in the municipality of San Giovanni in Fiore, in the Calabria region, Southern Italy (Figure 1a). Specifically, the study area is within the upland landscape of the Sila Massif, with an elevation ranging from about 600 m a.s.l. to approximately 2000 m a.s.l., showing a diverse topography (Figure 1a). Relics of summit paleo-surfaces bounded by steep slopes and cut by deep and narrow valleys characterize the landscape.
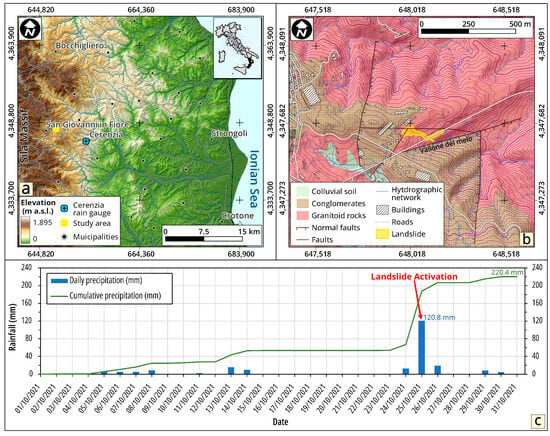
Figure 1.
The study area. (a) Geographical location of the study area; (b) geological map of the study area; (c) daily precipitation (Cerenzia rain gauge, 663 m a.s.l.).
The elevation in the landslide area ranges from about 800 m a. s. l. to 1000 m a.s.l. (Figure 1b).
The geological setting of the study area consists of a Paleozoic crystalline basement made up of granitoid rocks belonging to the Sila Unit (Figure 1b). Granitoid rocks are mainly represented by granite and granodiorite, locally intruded by pegmatite and aplite dikes [32]. These rocks are strongly tectonized and deeply weathered [32]. In the southern portion of the study area, unconformably overlying granitoid rocks hold Upper Pliocene–Middle Pleistocene clastic deposits including brown-reddish interstratified conglomerates and sands [32]. Finally, Holocene alluvial deposits are found along the main rivers of the study area (Figure 1b).
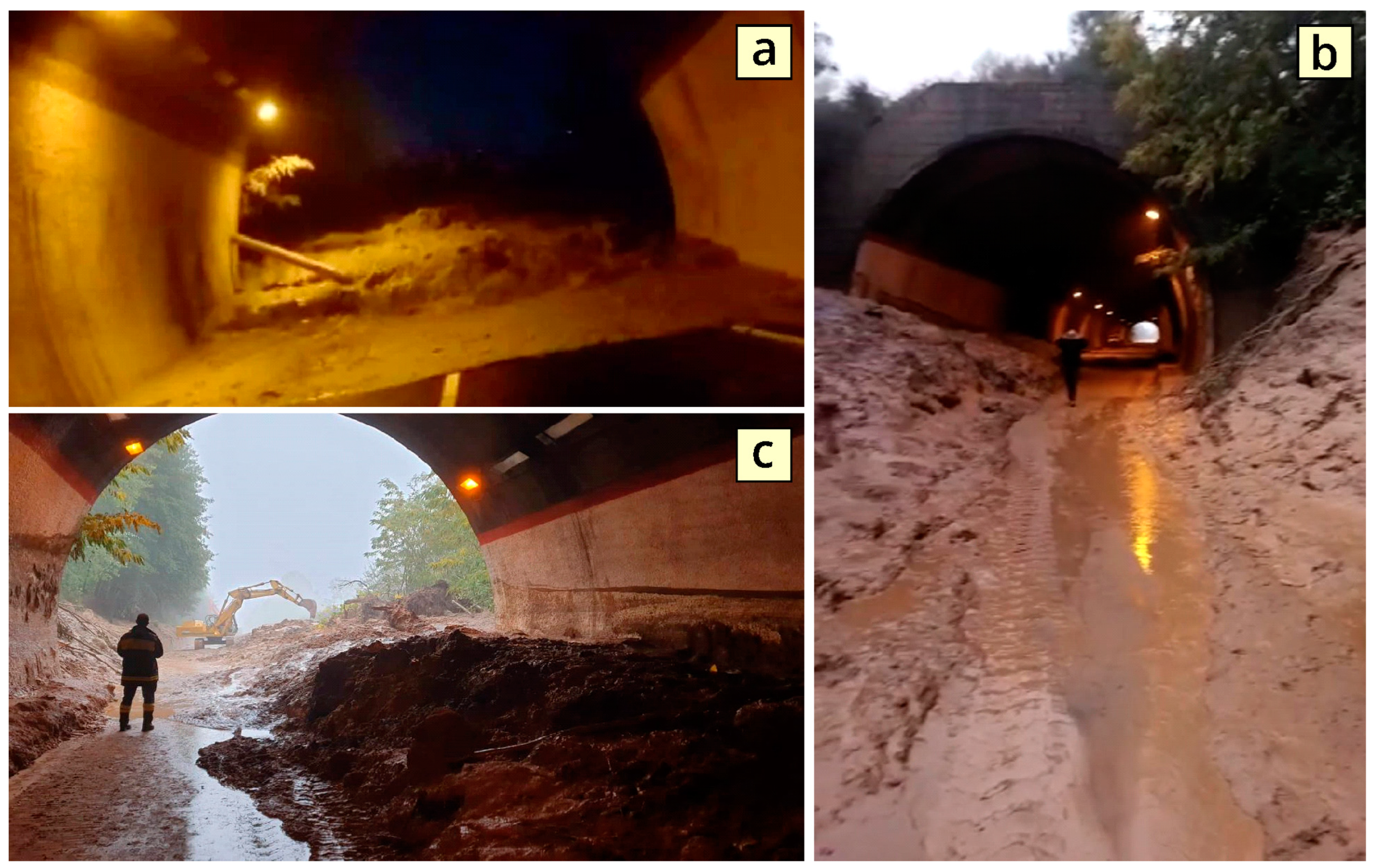
On 25 October 2021, around 9:00 p.m., a significant landslide occurred in the study area, affecting weathered granitoid rocks (Figure 1). Specifically, this landslide involved weathered granitoid of classes V and VI [32] located in a morphological depression. During the propagation phase, this landslide hit State Road 107, also known as the “Silana-Crotonese” arterial road, which serves as a crucial transportation route connecting the Tyrrhenian Sea to the Ionian Sea. The impact of the landslide was particularly severe at 91,000 km, where it breached the “Serra” tunnel (Figure 2). As a result of the landslide, State Road 107 was closed for several days after the event. This road closure, from the junction of San Giovanni in Fiore (at 90,000 km) to Castelsilano (at 95,000 km), caused significant inconvenience to the local population, leading to the diversion of road traffic onto alternative routes, including provincial roads.
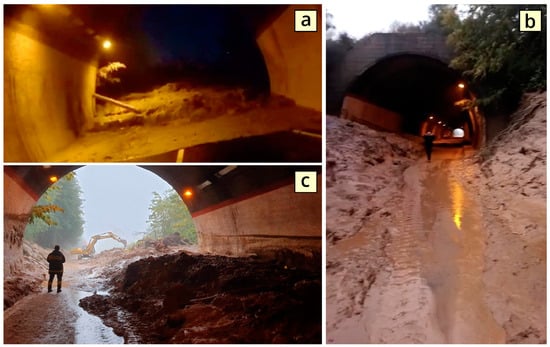
Figure 2.
Photos of the “Serra” tunnel invaded by landslide debris (from Web). (a) Photo taken during landslide event; (b,c) photos taken after landslide event.
Figure 2 provides visual documentation of the landslide, illustrating the accumulation of landslide debris on the road and the blockade of the “Serra” tunnel. The presence of such a large mass of debris highlights the impact of the landslide event and the challenges posed to transportation infrastructure and emergency response efforts.
The rainfall data for the landslide area were obtained from the ARPACAL Multi-Risk Functional Centre of the Calabria region (https://www.cfd.calabria.it/, accessed on 15 December 2021), specifically from the rain gauge station located in Cerenzia (Figure 1a). This station was chosen due to its proximity to the site of the landslide.
Analysis of the pluviometric data revealed that throughout the month of October 2021, daily precipitation levels remained consistently below 20 mm, except for 25 October 2021, when the landslide was triggered (Figure 1c). On this day, following 9 days of no rain, the pluviometric station recorded a rain amount of 134 mm (in the days from 23 to 25 October), of which 120.8 mm was recorded on October 25, marking the highest daily precipitation value recorded in the entire month.
The cumulative rainfall recorded from 1 October to 25 October 202 amounted to approximately 187 mm. This value indicates a notable increase in rainfall intensity on the day of the landslide event, particularly in comparison to the relatively low precipitation levels observed in the preceding days.
2.2. Data Acquisition and Elaboration
After the landslide event, a dedicated UAV flight was undertaken using a “Parrot Anafi Drone”, a lightweight quadcopter weighing 320 g, equipped with an integrated camera mounted on a three-axis hybrid gimbal stabilizer. The photographic sensor is a 1/2.4″ CMOS type, capable of capturing 16 MP (4608 × 3456 pixels) RGB images in rectilinear format.
The images were acquired following the pre-defined flight plan that was performed using the PIX4DCapture application for Android v. 4.11.0, a user-friendly mission planner that allowed for the definition of the acquisition area, flight execution modes, flight altitude, and the percentage of image overlap (Table 1). The UAV is also equipped with a GNSS system for accurate image geotagging, facilitating accurate mapping, and analysis of the landslide.

Table 1.
UAV survey-related data.
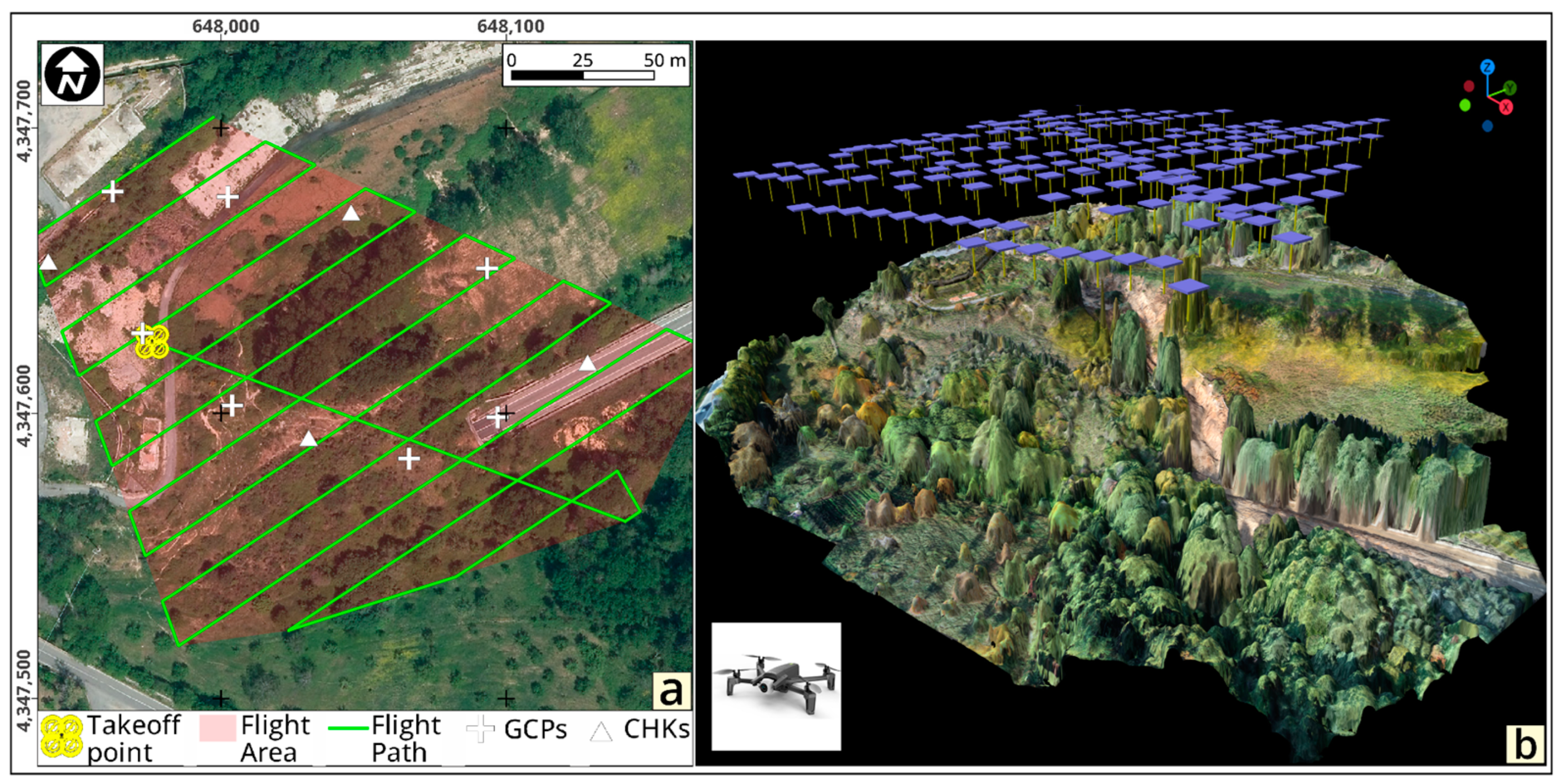
To ensure a complete photographic coverage of the landslide, a polygonal regular grid flight mission was carried out (Figure 3a), with an average altitude of 50 m, which achieved an average Ground Sample Distance (GSD) of 2.7 cm/pixel. A total of 188 nadiral photos were captured (Figure 3b), maintaining a frontal overlap of 90% and a side overlap of 85%; this configuration allowed for the coverage of an area of 4.5 ha (Table 1).
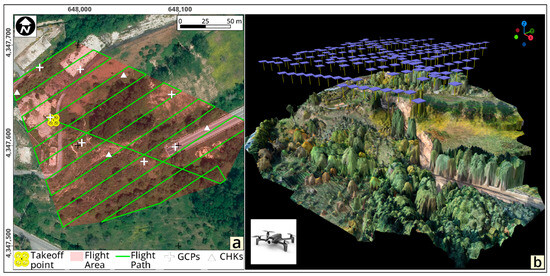
Figure 3.
(a) Flight plan scheme of the UAV for the acquisition of aerial photographs with ground control points (GCPs), check points (CHKs), and takeoff point; (b) 3D model with photo shot point positions.
As the drone is not equipped with a real-time kinematic (RTK) GNSS (Global Navigation Satellite System), to ensure accurate photogrammetric orientation and georeferencing of the image processing products, a total of 11 square targets were evenly distributed within the surveyed area (Figure 3a). The positions of these targets were acquired using a real-time kinematic (RTK) GNSS receiver from Leica. Out of the 11 points acquired, all with an overall precision ranging between 1 and 2 cm, 7 were employed as ground control points (GCPs) for the orientation, scaling and georeferencing process (Table 1). The remaining 4 points served as check points (CHKs) to assess the accuracy of the 3D model and its respective products.
In the post-flight, the collected images were processed using Regard3D software v. 1.0.0, employing the Structure from Motion (SfM) algorithm [16,33,34,35,36,37,38,39]. This is a user-friendly technique that combines computer vision and photogrammetry for the 3D reconstruction of a surface or an object. The SfM algorithm uses a sequence of main steps: (i) detection of key features and tie-points of the images, (ii) estimation of calibration parameters and camera positions and orientations, and (iii) dense matching and point cloud creation [33,39]. By applying this technique, a dense point cloud was generated consisting of 61.5 million points. By using the CHK points, the Root Mean Square Error (RMSE) values of the 3D model were found to be less than 0.06 m on X, Y, and Z (Table 2).
Table 2.
Accuracy of the 3D model and resolution of derived products from image processing.
The elaboration of the UAV 3D model produced an orthophoto of the entire study area (Figure 4a); the point cloud was subsequently processed using CloudCompare software v. 2.13.0.
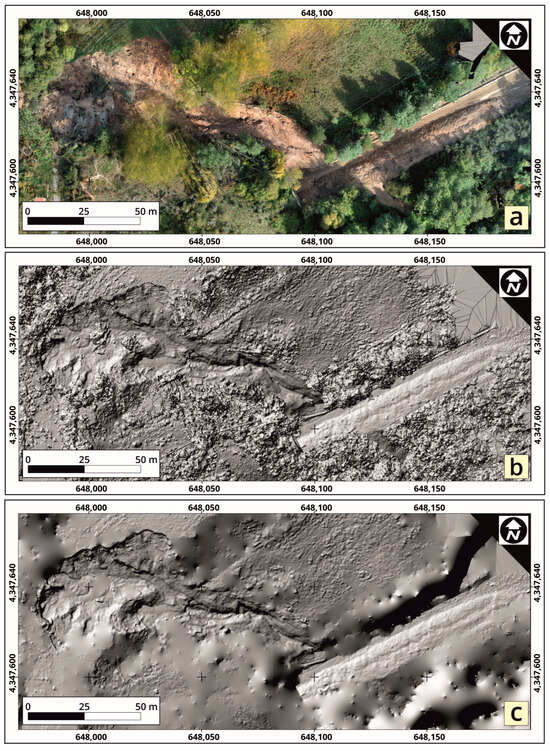
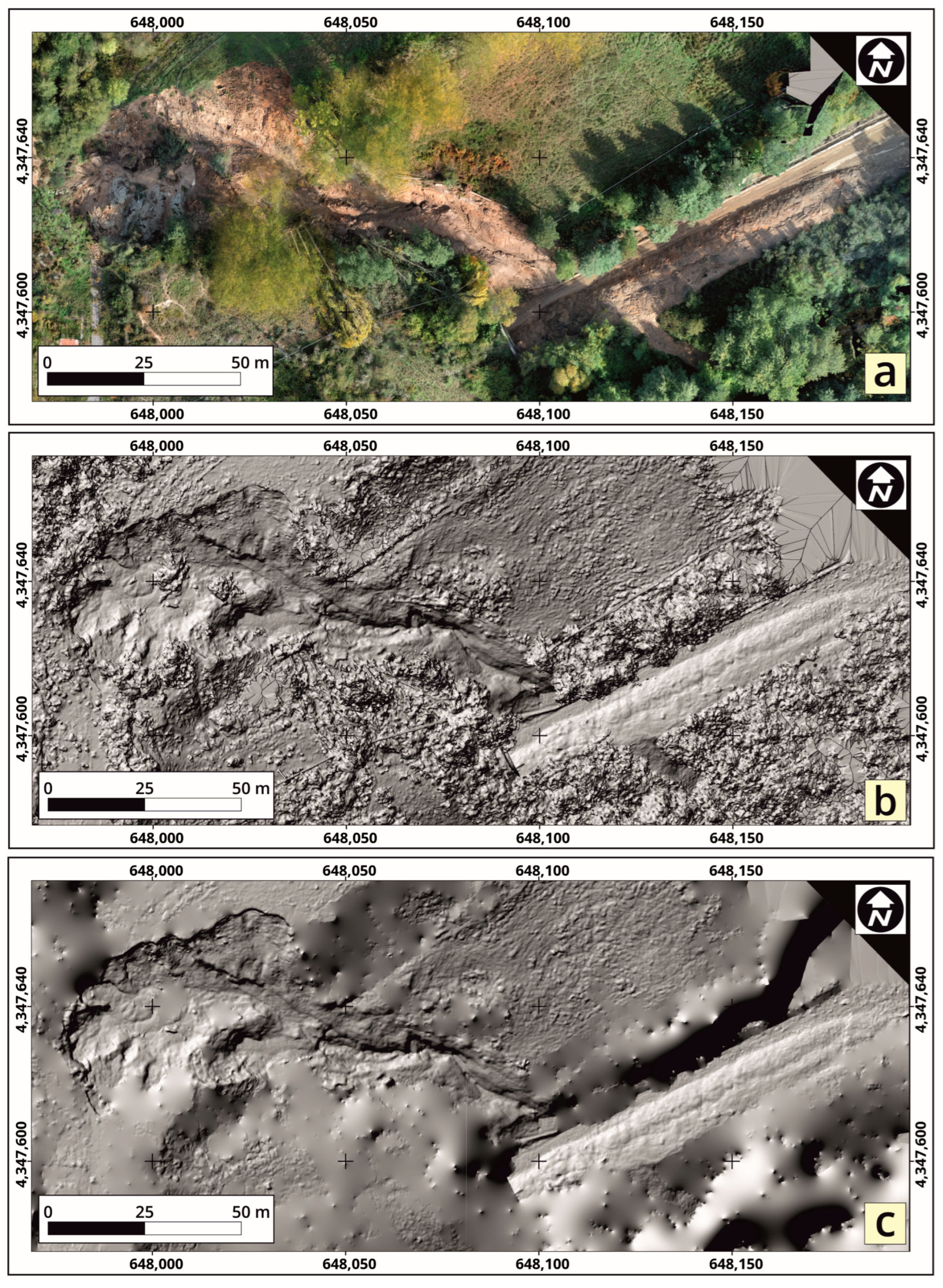
Figure 4.
UAV flight data. (a) Orthophoto generated through the UAV flight; (b) DSM hillshade; (c) DTM hillshade.
In the first step, a Digital Surface Model (DSM) of the landslide area was generated (Figure 4b), and in the second phase, the point cloud was manually cleaned of all elements such as anthropic features and vegetation to create the Digital Terrain Model (DTM) (Figure 4c).
The resolution of processing products is summarized in Table 2.
A detailed geomorphological investigation of the landslide area was carried out through the interpretation of orthophotos, shaded relief maps produced by DSM, and a field survey. This analysis enabled the identification and mapping of the landslide-affected area boundaries and several morphological features, such as the crown, major and minor scarps, and the source, transportation, and accumulation areas.
In order to estimate landslide velocity, a video available on the web and recorded by a citizen crossing the “Serra” tunnel during the landslide was used (https://www.facebook.com/100063821340885/videos/galleria-castelsilanosan-giovanni-in-fiore/264334655621611/ accessed on 25 October 2021). Different video frames were analyzed and, to reconstruct the distance covered by landslide in the “Serra” tunnel and the time employed to travel this distance, the first and last relevant video frames were used.
To calculate the morphometric variations and the volumes of the terrain mobilized by the landslide, it was necessary to compare the DTM obtained from the UAV 3D model with a DTM that predated the event. For this purpose, the LIDAR-DTM (Light Detection and Ranging Digital Terrain Model) from 2012, with a resolution of 1 m, acquired by the Italian Ministry of Environment and Energy Security, was used. The calculations were performed using QGIS software v. 3.28. Initially, the UAV DTM was resampled to a 1 m resolution to match the LIDAR-based DTM. Subsequently, a digital elevation model of difference (DoD) analysis was performed.
3. Results
The orthophoto generated from the UAV flight provided a detailed comprehensive overview of the landslide area, enabling a fine detection of its boundaries and characterization of its features (Figure 5a). The landslide, classified as a flow-type landslide, is a first-failure phenomenon as testified by the analysis of aerial photos (dated 1954–55, 2001, and 2007–2008) and Google Earth multi-temporal images (from 2003 to 2023) in which no signs of instability have been detected. It has a total length of 240 m, a maximum width of 70 m, and a maximum depth of about 6.5 m, and exhibits distinct zones including the source area, transportation zone, and accumulation zone (Figure 5a).
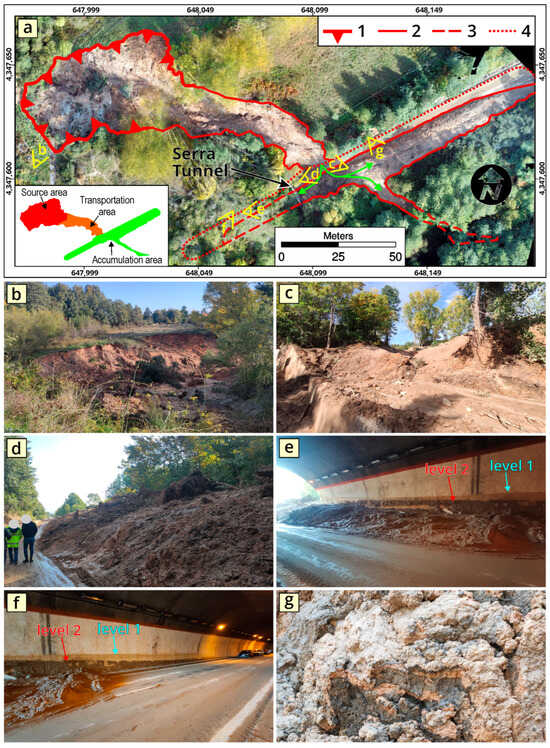
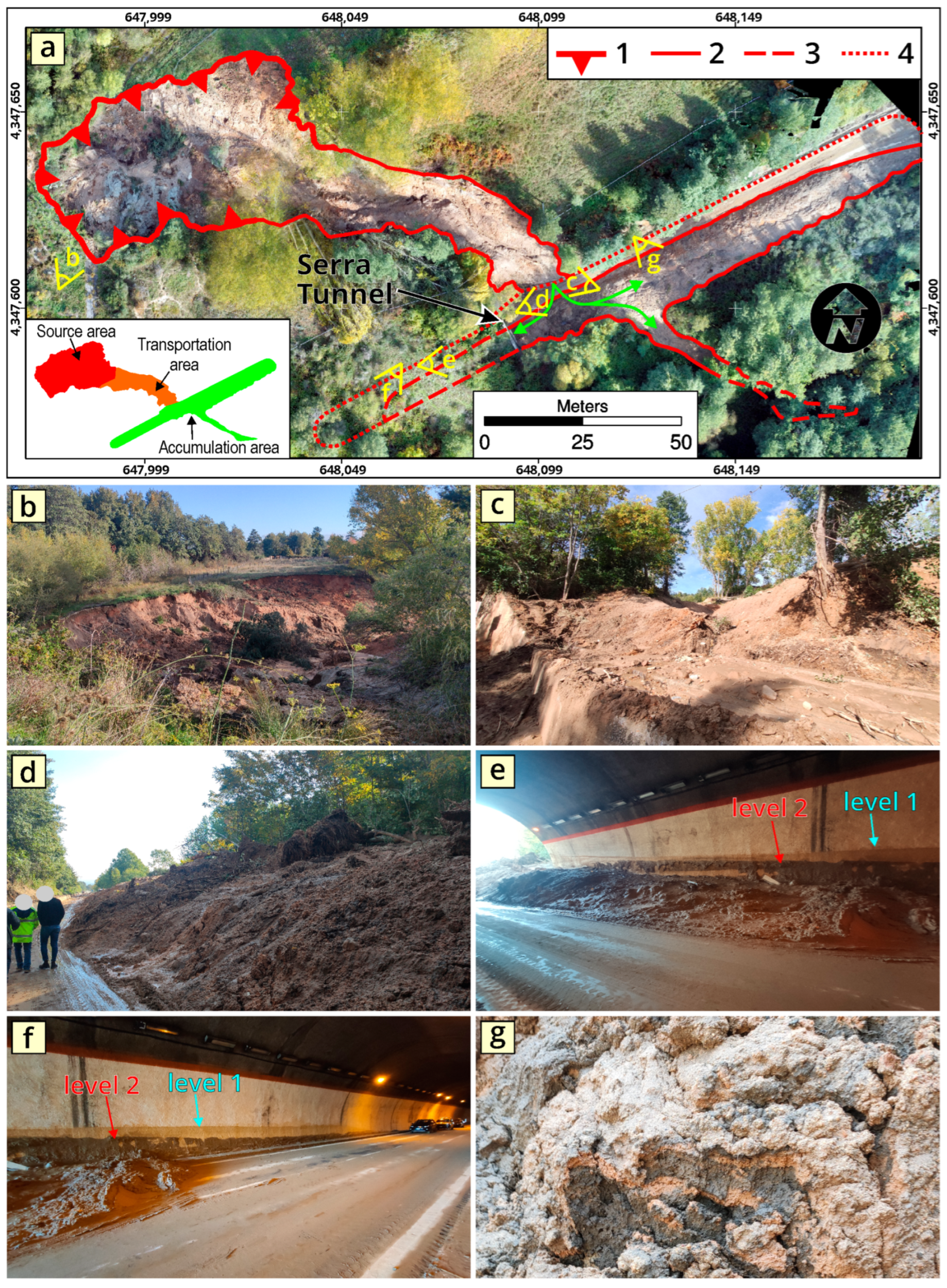
Figure 5.
Landslide view from the UAV flight and photos taken during an in situ survey. (a) Landslide boundary; (b) landslide crown; (c) a view of transportation area; the photo was taken at the point where the green arrows open; (d) the primary landslide accumulation area N-E oriented; photos taken by Serra tunnel; (e,f) landslide mass accumulated in the Serra tunnel (g) a detail of the accumulated landslide mass. Legend: (1) landslide crown; (2) landslide boundary; (3) landslide boundary not visible by image because it is covered by the Serra tunnel and vegetation; (4) boundary of landslide material removed to restore State Road 107 viability.
The landslide has a sub-circular shape crown with a length of approximately 170 m, a source area that covers approximately 2700 m2, a maximum length of 70 m, and a maximum width of 67 m. The landslide source area exhibits a spoon-shaped morphology, indicating a concave shape within which no distinct sliding surfaces are observed (Figure 5b).
During the propagation phase (Figure 5a), in the transportation area, the landslide moved downstream within the channel for a distance of 62 m, transversely invading it with a maximum width of 23 m. Along the path of propagation, signs of bed erosion were evident, indicating the removal of material from the channel bed due to the movement of the landslide mass (Figure 5a). The total transportation area, encompassing the region where the landslide material was transported downslope, is estimated to be approximately 1200 m2. Figure 5c provides a view of the transportation area, offering visual documentation of the changed topography resulting from the landslide movement, including changes in elevation, terrain morphology, and vegetation cover.
The accumulation area of the landslide covered approximately 2600 m2 and was characterized by the deposition of the landslide material in three distinct macro-zones, influenced by the natural topography and the present infrastructures (Figure 5a). The primary deposition direction was N-E oriented for a distance approximately equal to 100 m along State Road 107 (Figure 5a,d). This movement resulted in the deposition of landslide material along the roadside, affecting the surrounding terrain and infrastructure.
The secondary deposition direction was S-W oriented, approximately 70 m up State Road 107, and invaded a 55 m stretch of the “Serra” tunnel (Figure 5a,e,f). These figures provide visual evidence of the impact of the landslide on the tunnel wall, leaving visible marks and necessitating emergency responses. Specifically, two distinct levels of impact are observed: level 1 corresponds to the height reached by the water component of the landslide soil–water mixture; and level 2 indicates the maximum height reached by the landslide solid material. Emergency measures consisted of removing the landslide material from the tunnel.
Because the UAV flight was performed shortly after the landslide event, the obtained visual documentation, including the orthophoto (Figure 5a), provided a clear and detailed view of the landslide area revealing the extent of landslide debris that had reached and covered a few sections of State Road 107, including zones where part of the landslide material was dragged out to partially restore the road network for safety operations.
Figure 5g offers a detailed view of the landslide debris on the road, highlighting the presence of argillified material.
The images captured by the drone camera, especially in areas where direct access is challenging, provide valuable insights into the characteristics of the landslide event (Figure 6).
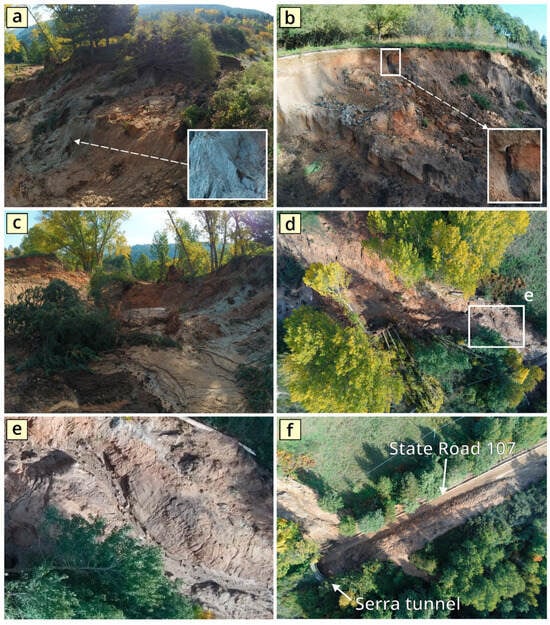
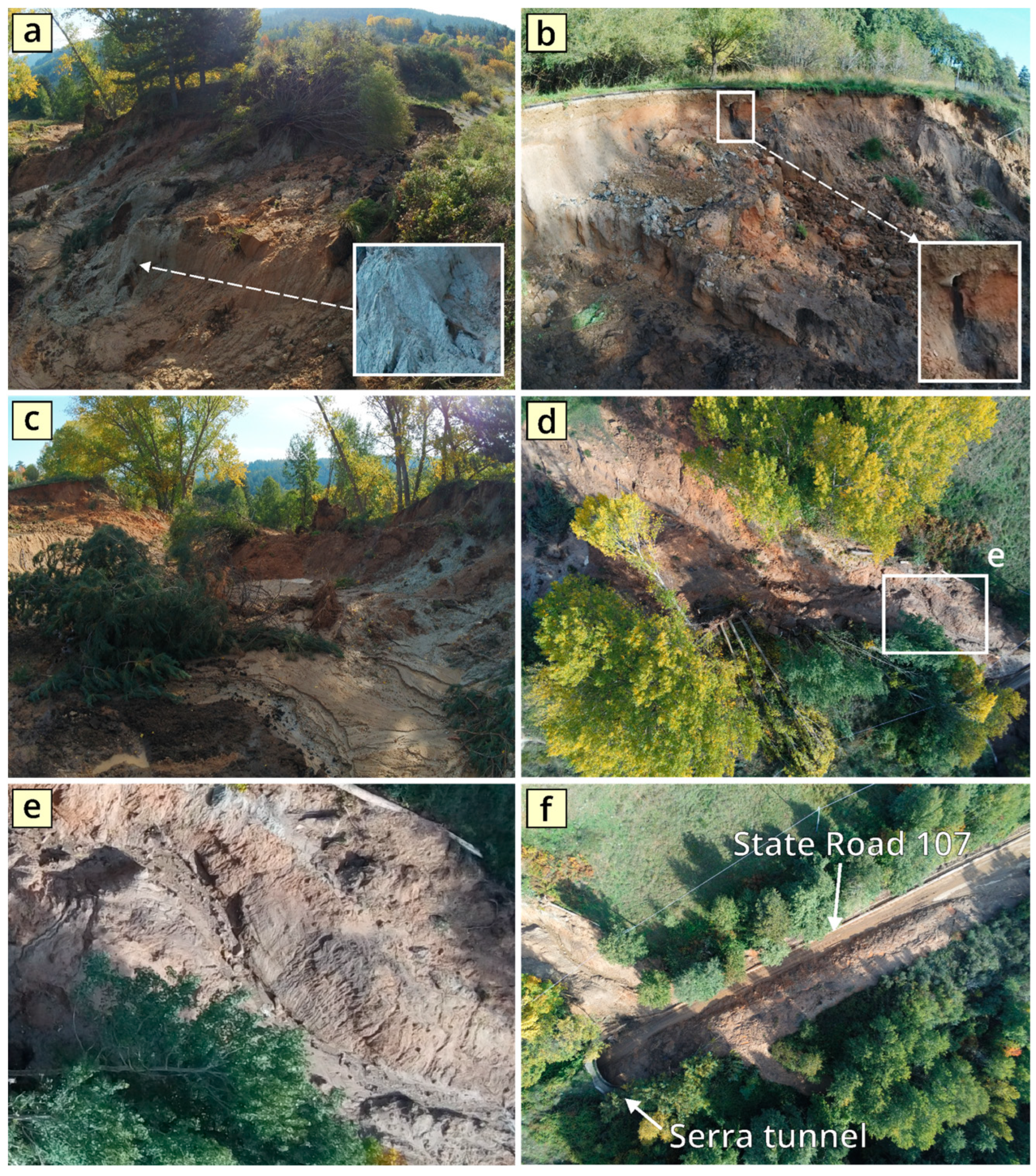
Figure 6.
Landslide photos taken by the UAV. (a,b) Landslide source area; (c) central part of landslide source area; (d,e) details of transportation area; (f) aerial view of accumulation area.
Figure 6a provides a detailed view of the landslide crown, particularly focusing on the source area where the landslide triggered. A damage zone in the granitoid rock is identified within the white box, aiding us in understanding the geological context and the potential contributing factors to the landslide occurrence. Figure 6b shows another view of the landslide crown, where the aftermath of the landslide event has been highlighted by a partial destruction of a secondary road. The same figure shows the presence of a pipe, which may have influenced landslide triggering.
Figure 6c shows the central part of landslide source area where tilted and uprooted trees and residual landslide material can be observed.
A detail of the landslide transportation area is shown in Figure 6d,e in which uprooted trees (Figure 6d) and erosional phenomena (Figure 6e) can be observed.
Figure 6f provides a visual depiction of the landslide accumulation zone. In the figure, it is possible to observe the landslide material that was deposited on State Road 107 and the “Serra” tunnel. As previously mentioned, part of the deposited material was removed by both infrastructures to restore their viability. In the lower part of the figure, it is also possible to observe that a part of the landslide material went up the roadside, channeled for about 60 m into a natural morphological depression and continuing its travel up to the “Vallone del Melo” drainage channel (Figure 1b).
Referring to the landslide velocity, some indications were obtained from the video published by the local media. The analysis of these video frames shows that the landslide traveled approximately 5 m in 7 s (Figure 7).

Figure 7.
Video frames of the landslide debris invading the “Serra” tunnel. (a) The first available video frame; (b) the last video frame (https://www.facebook.com/100063821340885/videos/galleria-castelsilanosan-giovanni-in-fiore/264334655621611/, accessed on 25 October 2021).
By means of DoD analysis between LIDAR-DTM (pre-landslide) and UAV-DTM (post-landslide), the areas where significant morphometric changes occurred due to the landslide were identified. Figure 8a shows a minimum negative value equal to about −6.3 m and a maximum positive value equal to 4.2 m. The minimum value was obtained in the landslide source area where a sub-vertical collapse occurred, while the maximum positive value was found in the landslide deposition area where the mobilized material accumulated. Moreover, several pixels located along the transportation area show values of about −2 m, testifying to the erosion power of the landslide during the propagation phase.
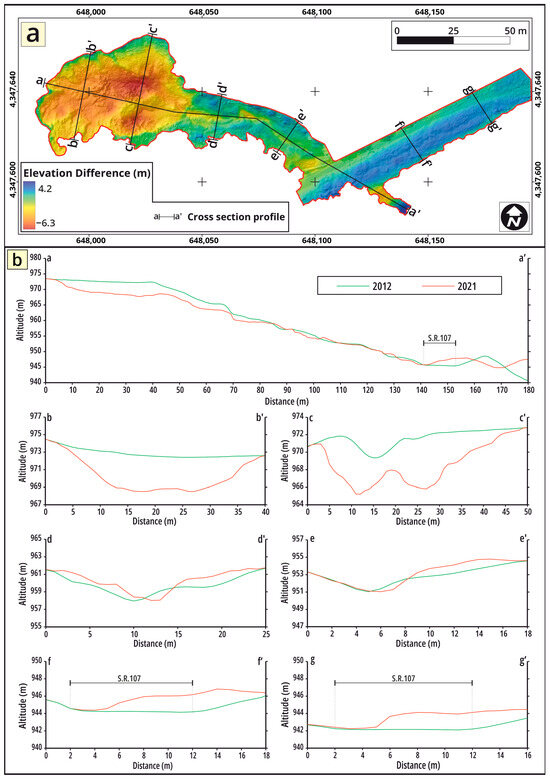
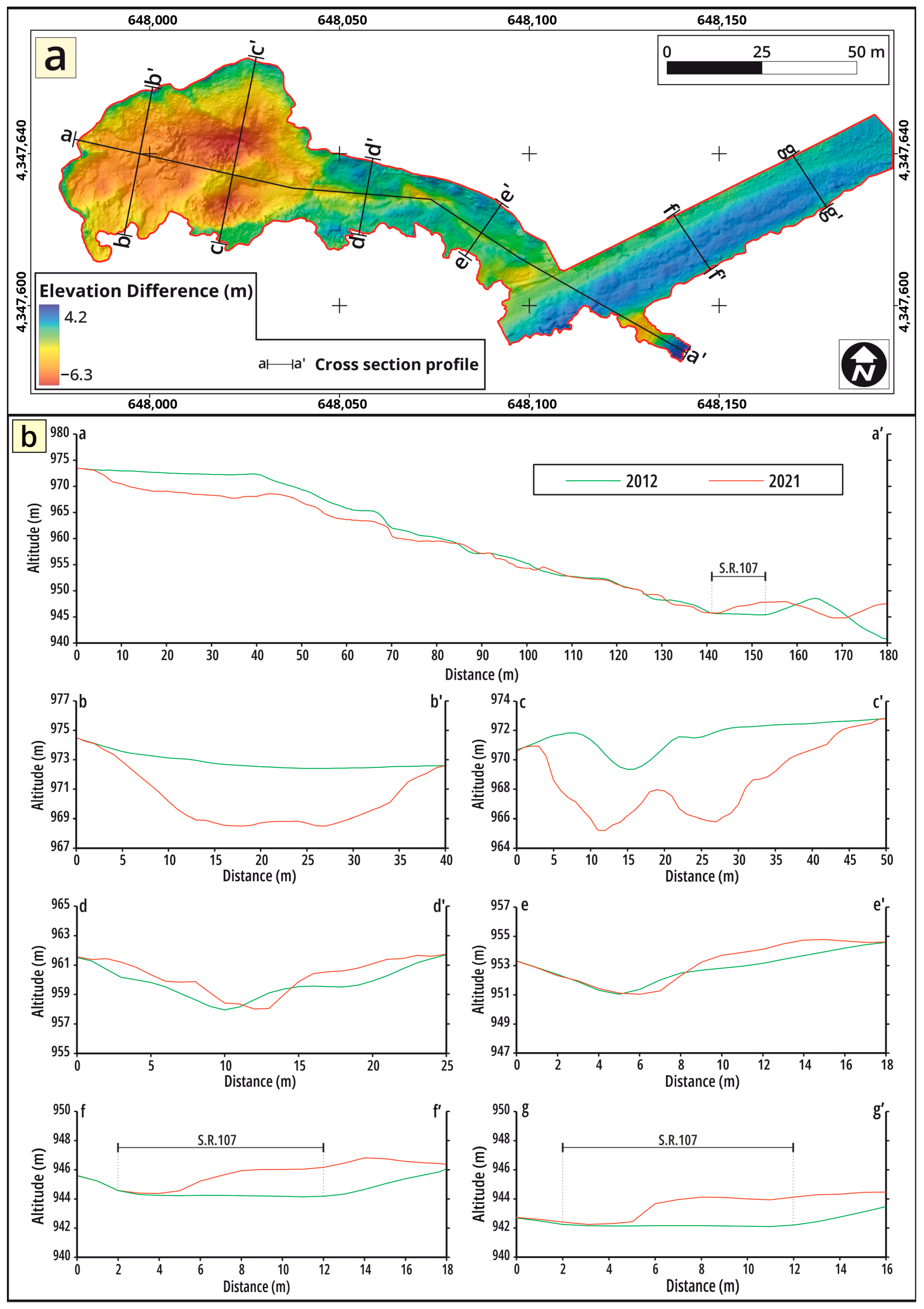
Figure 8.
(a) Elevation difference map and (b) longitudinal and transversal cross section profiles.
From the pre- and post-landslide DTMs, it was also possible to reconstruct, in several sections, the topographic changes that occurred in the landslide area before and after the landslide event (Figure 8b). The longitudinal profile (a-a’) clearly highlighted significant topographic changes that occurred in the source, accumulation, and deposition areas.
Specifically, referring to the source area, the two transversal profiles (b-b’ and c-c’) showed negative topographic changes (lowering) ranging from −4 m to −6 m, which testify to the displacement of the collapsed material. In the transportation area, both transversal profiles (d-d’ and e-e’) showed negative topographic changes, to be ascribed to erosion phenomena, and, in other points, positive topographic changes, to be ascribed to the deposition of the terrain along the banks of the channel.
The two traverse profiles (f-f’ and g-g’), tracked within the accumulation area, showed positive topographic changes of about 2 m, while immediately at the beginning of the accumulation zone (from 2 to about 5 m of the f-f’ section, and from 0 to about 5 m of the g-g’ section), no topographic changes can be observed due to the soil that was moved from the road surface to both restore its viability and allow the passage of vehicles for the restoration and safety of the area.
The volumetric topographic changes due to the landslide were computed on the basis of the vertical displacements observed comparing LIDAR-DTM and UAV-DTM. Specifically, in the landslide source area, a depletion of about 6000 m3 and a deposition volume of about 80 m3 were recorded. In the transportation area, the erosion processes during the landslide propagation path caused about 200 m3 of eroded material; however, in the same area, an accumulated volume of about 600 m3 was recorded along the canal edges. In the accumulation area, a deposition volume higher than 2600 m3 was recorded along the road.
It is worth highlighting that part of the landslide material entered the tunnel. The comparison of Digital Terrain Models (DTMs) cannot fully evaluate the volume of material accumulated within the tunnel. This volume was estimated through in situ surveys carried out concurrently with the drone flight. These surveys revealed that approximately 2.0 m of material accumulated within the tunnel, covering a total distance of 55 m along its length. Furthermore, about 2000 m3 was transported up the roadside and channeled for about 60 m into a natural morphological depression.
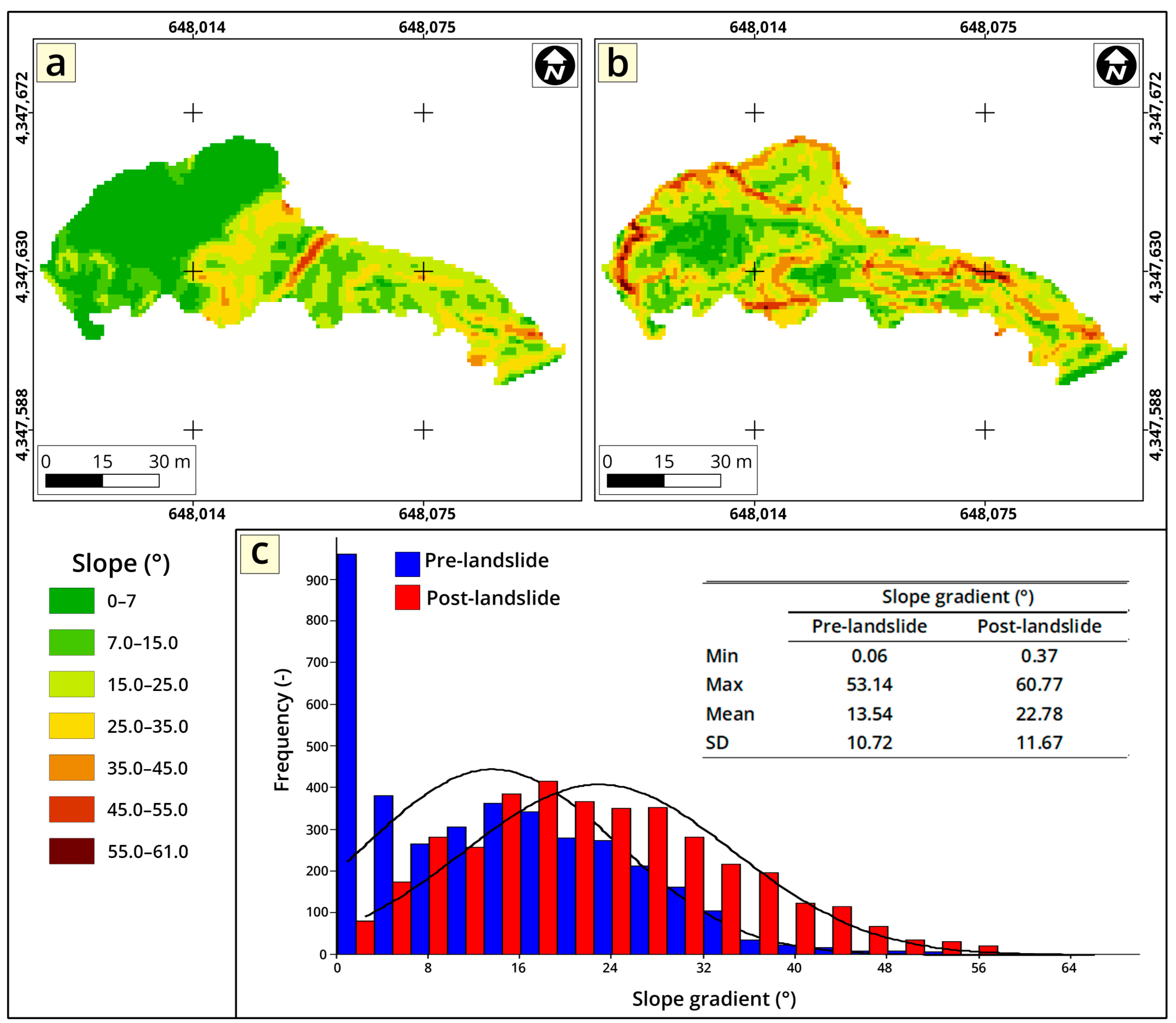
The analysis of the slope maps pre- and post-landslide elaborated from LIDAR-DTM and UAV-DTM, respectively (Figure 9a,b), highlighted, as expected, an overall variation in the slope cells within the landslide source and transportation areas.
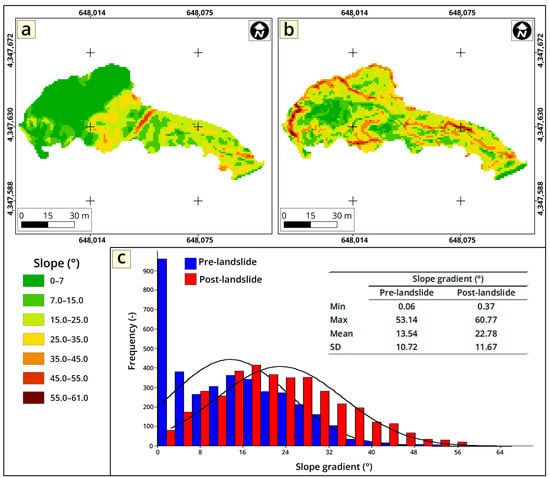
Figure 9.
Slope gradient maps. Legend: (a) slope gradient map pre-landslide; (b) slope gradient map post-landslide; (c) frequency distribution of slope gradient before and after the landslide event.
These morphological modifications are attributed to the main scarp and minor scarps formed due to landslide depletion in the source area and the erosion processes that occurred in the channel bed in the transportation area. Figure 9c shows the frequency of cells falling into each class of slope gradient. By comparing the histogram, where blue indicates the frequency before the landslide and red indicates the frequency post-landslide, it can be observed that there is not only a general increase in the cells that fall within higher slope gradient classes, but also that the maximum slope gradient changed from 53° pre-landslide to about 61° post-landslide. Generally, an increase in the mean slope gradient is observed from about 14° pre-landslide to about 23° post-landslide.
4. Discussion and Conclusions
UAVs are commonly used in the scientific literature for mapping landslides due to several key aspects: firstly, the cost-effectiveness of drone flights if compared with traditional methods; secondly, UAVs are able to cover large areas relatively quickly and capture detailed images of landslide features; and thirdly, drones can take data from challenging or inaccessible areas, so eliminating the need for researchers to physically access hazardous terrain and reducing the risk of accidents or injuries [40].
Owing to their advanced capabilities, UAVs have been applied to various geological contexts and landslide types. UAVs have been successfully used to analyze both fast-moving and slow-moving landslides [11,16,41,42,43,44,45,46]. Specifically, for fast-moving landslides, UAVs have been primarily used to detect cracks and potential detachment points, to map landslide boundaries such as inception areas, flow paths, and deposition areas, and to estimate the volume of displaced material after the landslide event.
In the case of slow-moving landslides, UAVs have been used to identify subtle ground movements, to detect ground fissures and cracks indicative of potential landslides, and to support the analysis of complex landslides.
In this paper, the potentiality of using a drone equipped with a camera is shown by its application to a hazardous fast-moving landslide that caused a risky situation because it invaded the State Road 107 “Silana-Crotonese”, an important road artery located in Calabria.
The flight was carried out three days after the landslide event in an area that was not yet accessible in order to not only obtain information about the area affected by the phenomenon, but also to evaluate any potential retrogression of the escarpment and define any residual risk.
The utility of this technique in landslide detection was testified by the obtained results, which showed how the high-resolution orthophoto obtained by an UAV flight in the days immediately after the landslide event and the related DSM (Figure 5) allowed us to easily map landslide boundaries and the related morphological features.
Overall, planar (X,Y) and elevation (Z) errors obtained during the processing of UAV images were low (average RMSE below 0.06 m), which confirmed the good accuracy of the 3D model. The high values of displacement with respect to the calculated RMSE values allowed us to estimate, in a reliable way, the morphometric changes and the volume of material mobilized by the landslide. Moreover, these values of RMSE are comparable with those achieved in other works, e.g., [16,17,22,40]. However, in areas characterized by dense and uniform vegetation, the UAV 3D model and related products could have higher uncertainty values, caused by the inability to accurately reconstruct the terrain features below shrub coverage on the slope.
This landslide can be classified as flow-type, the involved material reached a maximum depth of about 6.3 m, and the landslide velocity in the paroxistic phase can be classified to the classes from very rapid to extremely rapid [47].
The landslide involved deeply weathered and strongly tectonized granitoid rocks. Specifically, the drone flight underlined a wide fault damage zone in granitoid rock linked to a NE-SW fault segment (Figure 6a) of about 20 m. Locally, along this damage zone, clayey fault gouging occasionally occurred.
The orthophoto obtained by the drone flight allowed us to clearly identify the source area where no signs of slide surfaces could be observed, and to capture local phenomena of bed erosion occurring in the transportation area, where the landslide surge moved downstream, undermining bed erosion and steep banks. In the depositional area, remains of weathered granitoid, clay portions of the damage zone and remains of uprooted trees and vegetation cover were deposited in a mixture of soil, organic material, and water. This soil–water mixture prevalently moved along the State Road 107 following the natural slope gradient (Figure 5d); a remaining part of the soil–water rose within the “Serra” tunnel (Figure 5e,f), and part of the material was channeled into a natural morphological depression.
Regarding the ability of the drone to identify topographic changes, as testified by several authors [11,13,16,19], the comparison between LIDAR-DTM and UAV-DTM, performed using DoD analysis, allowed the identification of the areas where morphological variations occurred due of the landslide event. Figure 8a shows a minimum negative value equal to about −6.3 m and a maximum positive value equal to 4.2 m. The minimum value was obtained in the landslide source area where a sub-vertical collapse was observed. The maximum positive value was found in the landslide deposition area where the landslide debris was accumulated. This information is affected by the limitation that the flight was carried out when part of the material accumulated on the road was moved to allow road transit.
Based on the information acquired by the UAV flight, it can be affirmed that the main predisposing factors of the landslide are linked to the geological setting of the study area and the geotechnical characteristics of the geomaterials involved in the landslide.
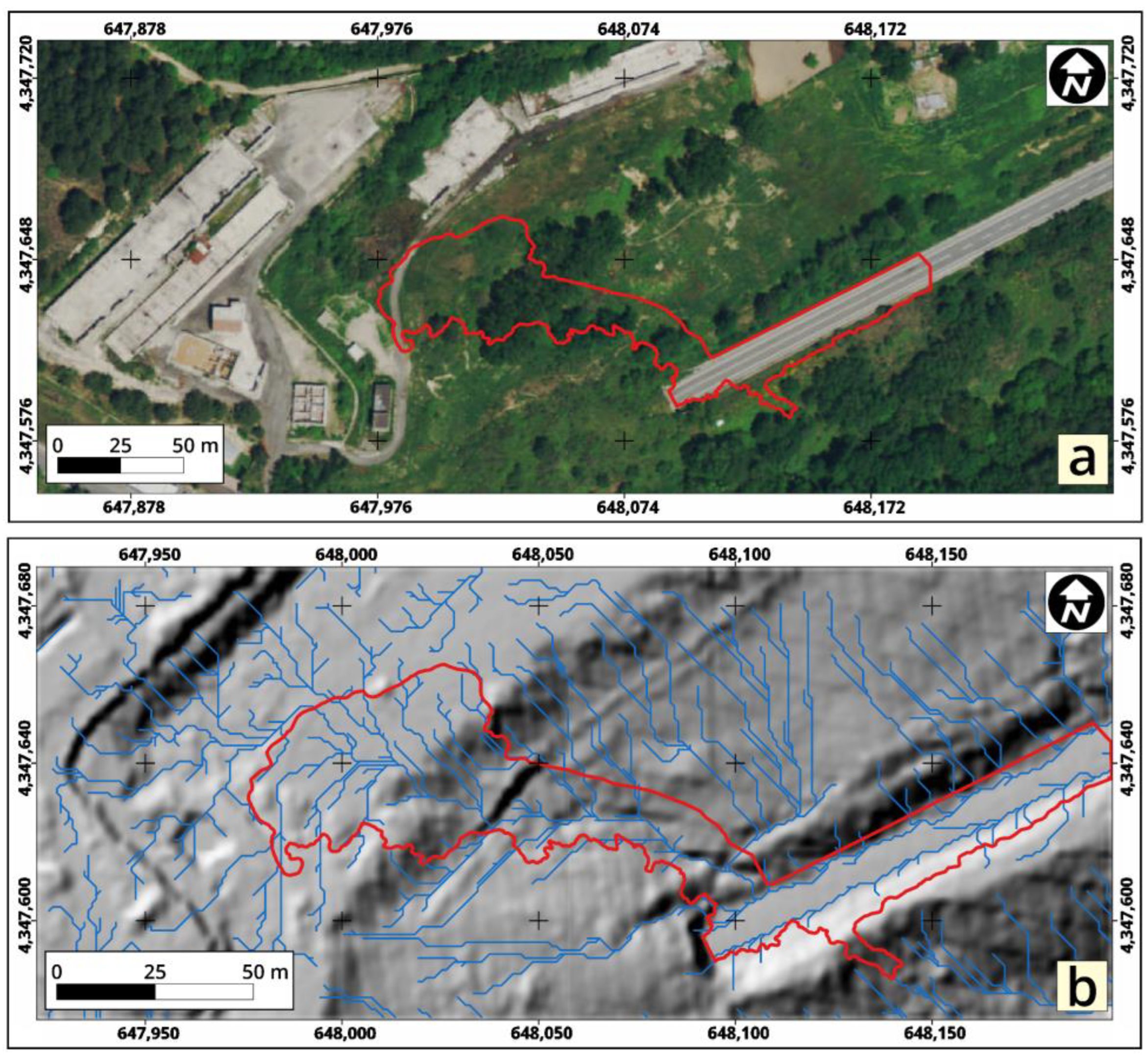
On the basis of what we know, the triggering cause can be traced back to the intense rainfall affecting the study area in the 24 h prior to the event (120 mm of rain in one day). However, it should be noted that, in the landslide-affected area (Figure 10a), an analysis of the drainage conditions conducted before the landslide on the LIDAR-DTM shows a convergence of the surface drainage lines in an area located at the center of the landslide source area (Figure 10b).
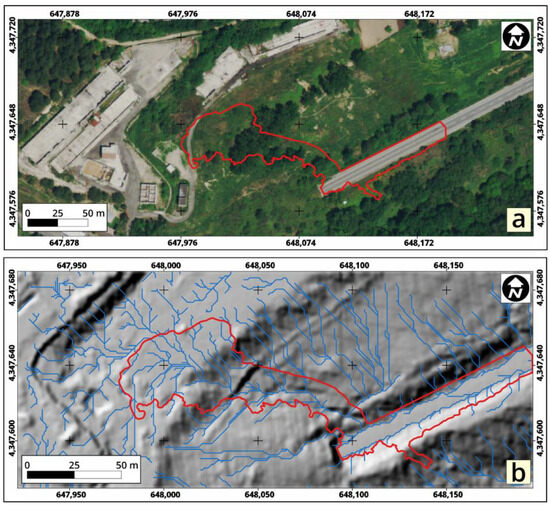
Figure 10.
Orthophoto and drainage network of the study area pre-landslide event (in red the landslide boundary). (a) Orthophoto of the study area; (b) Drainage network (blue line) obtained by LIDAR-DTM with a pixel resolution of 1 m.
This convergence is partly due to the morphological structure of the study area, and partly to the urbanization which, by waterproofing the landslide escarpment upstream area (Figure 10a), strongly influenced the surface runoff and favored this convergence (Figure 10b).
Anthropogenic concurrent causes of landslide triggering cannot be excluded given the presence of a pipe in the source area of the landslide phenomenon (Figure 6b).
The obtained information allows us, in this specific case, to have both an indication of the type of landslide and a possible estimation of landslide retrogression areas. In this regard, it was possible to ascertain that no evidence of retrogression could be observed for the escarpment and along the flanks.
What has been discussed so far will enable us to plan detailed studies in terms of surveys and investigations to be carried out for an in-depth characterization of the landslide, aiming also to identify the most suitable risk mitigation measures.
Referring to a circular approach [48], these results provide useful indications for typifying similar landslides that can occur in geological contexts characterized by the presence of weathered granitoid rocks [49].
Author Contributions
Conceptualization, L.B., M.C. (Mariantonietta Ciurleo), M.C. (Massimo Conforti) and G.G.; methodology, L.B., M.C. (Mariantonietta Ciurleo), M.C. (Massimo Conforti), G.G. and M.M.; UAV surveys and data processing, M.M.; data analysis, all authors; investigation, all authors; data curation, all authors; writing—original draft preparation, all authors; writing—review and editing, all authors; funding acquisition, L.B., M.C. (Mariantonietta Ciurleo), M.C. (Massimo Conforti) and G.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially funded by the projects: (i) Next Generation EU—Italian NRRP, Mission 4, Component 2, Investment 1.5, call for the creation and strengthening of ’Innovation Ecosystems’, building ’Territorial R&D Leaders’ (Directorial Decree n. 2021/3277)—project Tech4You—Technologies for climate change adaptation and quality of life improvement, n. ECS0000009; (ii) the Project SOIL SHADES “SOIL features and pedogenic processes as predisposing factors of SHAllow landsliDES” 2022WZMML7_PE10_PRIN2022—PNRR M4.C2.1.1—Finanziato dall’Unione Europea—Next Generation EU—CUP: B53D23007550006.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Petrucci, O. Landslide Fatality Occurrence: A Systematic Review of Research Published between January 2010 and March 2022. Sustainability 2022, 14, 9346. [Google Scholar] [CrossRef]
- Bathrellos, G.D.; Koukouvelas, I.K.; Skilodimou, H.D.; Nikolakopoulos, K.G.; Vgenopoulos, A.-L. Landslide causative factors evaluation using GIS in the tectonically active Glafkos River area, northwestern Peloponnese, Greece. Geomorphology 2024, 461, 109285. [Google Scholar] [CrossRef]
- Calista, M.; Miccadei, E.; Piacentini, T.; Sciarra, N. Morphostructural, Meteorological and Seismic Factors Controlling Landslides in Weak Rocks: The Case Studies of Castelnuovo and Ponzano (North East Abruzzo, Central Italy). Geosciences 2019, 9, 122. [Google Scholar] [CrossRef]
- Zou, Y.; Qi, S.; Guo, S.; Zheng, B.; Zhan, Z.; He, N.; Huang, X.; Hou, X.; Liu, H. Factors controlling the spatial distribution of coseismic landslides triggered by the Mw 6.1 Ludian earthquake in China. Eng. Geol. 2022, 296, 106477. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Istiak, M.A.; Syeed, M.M.M.; Hossain, M.S.; Uddin, M.F.; Hasan, M.; Khan, R.H.; Azad, N.S. Adoption of Unmanned Aerial Vehicle (UAV) Imagery in Agricultural Management: A Systematic Literature Review. Ecol. Inf. 2023, 78, 102305. [Google Scholar] [CrossRef]
- AlAli, Z.T.; Alabady, S.A. The Role of Unmanned Aerial Vehicle and Related Technologies in Disasters. Remote Sens. Appl. 2022, 28, 100873. [Google Scholar] [CrossRef]
- Rohman, B.P.A.; Andra, M.B.; Putra, H.F.; Fandiantoro, D.H.; Nishimoto, M. Multisensory Surveillance Drone for Survivor Detection and Geolocalization in Complex Post-Disaster Environment. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9368–9371. [Google Scholar]
- Martinez-Alpiste, I.; Golcarenarenji, G.; Wang, Q.; Alcaraz-Calero, J.M. Search and Rescue Operation Using UAVs: A Case Study. Expert. Syst. Appl. 2021, 178, 114937. [Google Scholar] [CrossRef]
- Gomez, C.; Purdie, H. UAV-Based Photogrammetry and Geocomputing for Hazards and Disaster Risk Monitoring—A Review. Geoenviron. Disasters 2016, 3, 23. [Google Scholar] [CrossRef]
- Borrelli, L.; Conforti, M.; Mercuri, M. Lidar and UAV System Data to Analyse Recent Morphological Changes of a Small Drainage Basin. ISPRS Int. J. Geoinf. 2019, 8, 536. [Google Scholar] [CrossRef]
- Fell, R.; Ho, K.K.S.; Lacasse, S.; Leroi, E. A Framework for Landslide Risk Assessment and Management. In Landslide Risk Management; Hungr, O., Fell, R., Couture, R., Eberhardt, E., Eds.; Taylor and Francis: London, UK, 2005; pp. 3–26. [Google Scholar]
- Conforti, M.; Mercuri, M.; Borrelli, L. Morphological Changes Detection of a Large Earthflow Using Archived Images, LiDAR-Derived DTM, and UAV-Based Remote Sensing. Remote Sens. 2021, 13, 120. [Google Scholar] [CrossRef]
- Guo, Z.; Chen, L.; Yin, K.; Shrestha, D.P.; Zhang, L. Quantitative risk assessment of slow-moving landslides from the viewpoint of decision-making: A case study of the Three Gorges Reservoir in China. Eng. Geol. 2020, 273, 105667. [Google Scholar] [CrossRef]
- França Pereira, F.; Sussel Gonçalves Mendes, T.; Jorge Coelho Simões, S.; Magalhães de Andrade, M.R.; Lopes Reiss, M.L.; Cavalcante Renk, J.F.; da Silva Santos, T.C. Comparison of LiDAR- and UAV-derived data for landslide susceptibility mapping using Random Forest algorithm. Landslides 2023, 20, 579–600. [Google Scholar] [CrossRef]
- Mercuri, M.; Conforti, M.; Ciurleo, M.; Borrelli, L. UAV Application for Short-Time Evolution Detection of the Vomice Landslide (South Italy). Geosciences 2023, 13, 29. [Google Scholar] [CrossRef]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV Surveys for Landslide Mapping and Characterization. Landslides 2018, 15, 1045–1052. [Google Scholar] [CrossRef]
- Garnica-Peña, R.J.; Alcántara-Ayala, I. The Use of UAVs for Landslide Disaster Risk Research and Disaster Risk Management: A Literature Review. J. Mt. Sci. 2021, 18, 482–498. [Google Scholar] [CrossRef]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review Article: The Use of Remotely Piloted Aircraft Systems (RPASs) for Natural Hazards Monitoring and Management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef]
- Sun, J.; Yuan, G.; Song, L.; Zhang, H. Unmanned Aerial Vehicles (UAVs) in Landslide Investigation and Monitoring: A Review. Drones 2024, 8, 30. [Google Scholar] [CrossRef]
- Godone, D.; Allasia, P.; Borrelli, L.; Gullà, G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sens. 2020, 12, 1039. [Google Scholar] [CrossRef]
- Zárate, B.A.; El Hamdouni, R.; Fernández del Castillo, T. Characterization and Analysis of Landslide Evolution in Intramountain Areas in Loja (Ecuador) Using RPAS Photogrammetric Products. Remote Sens. 2023, 15, 3860. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; He, F.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition. Remote Sens. 2016, 8, 95. [Google Scholar] [CrossRef]
- Giordan, D.; Allasia, P.; Manconi, A.; Baldo, M.; Santangelo, M.; Cardinali, M.; Corazza, A.; Albanese, V.; Lollino, G.; Guzzetti, F. Morphological and Kinematic Evolution of a Large Earthflow: The Montaguto Landslide, Southern Italy. Geomorphology 2013, 187, 61–79. [Google Scholar] [CrossRef]
- Ciurleo, M.; Ferlisi, S.; Foresta, V.; Mandaglio, M.C.; Moraci, N. Landslide Susceptibility Analysis by Applying TRIGRS to a Reliable Geotechnical Slope Model. Geosciences 2021, 12, 18. [Google Scholar] [CrossRef]
- Yordanov, V.; Truong, Q.X.; Brovelli, M.A. Estimating Landslide Surface Displacement by Combining Low-Cost UAV Setup, Topographic Visualization and Computer Vision Techniques. Drones 2023, 7, 85. [Google Scholar] [CrossRef]
- Chang, K.-J.; Tseng, C.-W.; Tseng, C.-M.; Liao, T.-C.; Yang, C.-J. Application of Unmanned Aerial Vehicle (UAV)-Acquired Topography for Quantifying Typhoon-Driven Landslide Volume and Its Potential Topographic Impact on Rivers in Mountainous Catchments. Appl. Sci. 2020, 10, 6102. [Google Scholar] [CrossRef]
- Alawad, W.; Ben Halima, N.; Aziz, L. An Unmanned Aerial Vehicle (UAV) System for Disaster and Crisis Management in Smart Cities. Electronics 2023, 12, 1051. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-Assisted Disaster Management: Applications and Open Issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Bashyam, A.; Guggenheim, J.W. UAVs for Wilderness Search and Rescue: Real-World Considerations and Technology Roadmap for Fixed Wing UAVs. J. Search Rescue 2019, 3, 1–18. [Google Scholar] [CrossRef]
- Losnegård, S. Europe’s Largest Drone Operation after Deadly Landslide in Norway. 420 Missions and 200 Hours of Airtime. Available online: https://www.uasnorway.no/europes-largest-drone-operation-after-deadly-landslide-in-norway-420 (accessed on 1 July 2024).
- Borrelli, L.; Coniglio, S.; Critelli, S.; La Barbera, A.; Gullà, G. Weathering Grade in Granitoid Rocks: The San Giovanni in Fiore Area (Calabria, Italy). J. Maps 2016, 12, 260–275. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S. Time Series Analysis of Landslide Dynamics Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-Resolution Monitoring of Himalayan Glacier Dynamics Using Unmanned Aerial Vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping Landslide Displacements Using Structure from Motion (SfM) and Image Correlation of Multi-Temporal UAV Photography. Prog. Phys. Geogr. Earth Environ. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Rippin, D.M.; Pomfret, A.; King, N. High Resolution Mapping of Supra-Glacial Drainage Pathways Reveals Link between Micro-Channel Drainage Density, Surface Roughness and Surface Reflectance. Earth Surf. Process Landf. 2015, 40, 1279–1290. [Google Scholar] [CrossRef]
- Tarolli, P. High-Resolution Topography for Understanding Earth Surface Processes: Opportunities and Challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Pellicani, R.; Argentiero, I.; Manzari, P.; Spilotro, G.; Marzo, C.; Ermini, R.; Apollonio, C. UAV and Airborne LiDAR Data for Interpreting Kinematic Evolution of Landslide Movements: The Case Study of the Montescaglioso Landslide (Southern Italy). Geosciences 2019, 9, 248. [Google Scholar] [CrossRef]
- Ullman, S. Computational Studies in the Interpretation of Structure and Motion: Summary and Extension. Mass. Inst. Technol. AI Memo 1983, 706, 1–25. [Google Scholar]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The Use of Unmanned Aerial Vehicles (UAVs) for Engineering Geology Applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef]
- Massaro, L.; Forte, G.; De Falco, M.; Rauseo, F.; Santo, A. Rockfall source identification and trajectory analysis from UAV-based data in volcano-tectonic areas: A case study from Ischia Island, Southern Italy. Bull. Eng. Geol. Environ. 2024, 83, 75. [Google Scholar] [CrossRef]
- Choi, S.K.; Ramirez, R.A.; Lim, H.H.; Kwon, T.H. Multi-source remote sensing-based landslide investigation: The case of the August 7, 2020, Gokseong landslide in South Korea. Sci. Rep. 2024, 14, 12048. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, X.; Pan, X.; Wei, M.; Yan, J.; Chen, J. Characterization of high and steep slopes and 3D rockfall statistical kinematic analysis for Kangyuqu area, China. Eng. Geol. 2022, 308, 106807. [Google Scholar] [CrossRef]
- De Falco, M.; Forte, G.; Marino, E.; Massaro, L.; Santo, A. UAV and field survey observations on the November 26th 2022 Celario flowslide, Ischia Island (Southern Italy). J. Maps 2023, 19, 2261484. [Google Scholar] [CrossRef]
- Devoto, S.; Macovaz, V.; Mantovani, M.; Soldati, M.; Furlani, S. Advantages of Using UAV Digital Photogrammetry in the Study of Slow-Moving Coastal Landslides. Remote Sens. 2020, 12, 3566. [Google Scholar] [CrossRef]
- Johnson, S.E.; Haneberg, W.C.; Bryson, L.S.; Crawford, M.M. Measuring ground surface elevation changes in a slow-moving colluvial landslide using combinations of regional airborne lidar, UAV lidar and UAV photogrammetric surveys. Q. J. Eng. Geol. Hydrogeol. 2023, 56, qjegh2022-078. [Google Scholar] [CrossRef]
- Cruden, D.M.; Varnes, D.J. Landslides: Investigation and Mitigation. Chapter 3—Landslide Types and Processes. Transp. Res. Board. Spec. Rep. 1996, 247, 36–75. [Google Scholar]
- Gullà, G.; Conforti, M.; Borrelli, L. A Refinement Analysis of the Shallow Landslides Susceptibility at Regional Scale Supported by GIS-Aided Geo-Database. Geomat. Nat. Hazards Risk 2021, 12, 2500–2543. [Google Scholar] [CrossRef]
- Gullà, G.; Peduto, D.; Borrelli, L.; Antronico, L.; Fornaro, G. Geometric and Kinematic Characterization of Landslides Affecting Urban Areas: The Lungro Case Study (Calabria, Southern Italy). Landslides 2017, 14, 171–188. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).