
A Cloud Computing Framework for Space Farming Data Analysis




Abstract
1. Introduction
- Development of a webserver as a monitoring hub;
- Establishment of edge-to-cloud communications using AWS IoT Core;
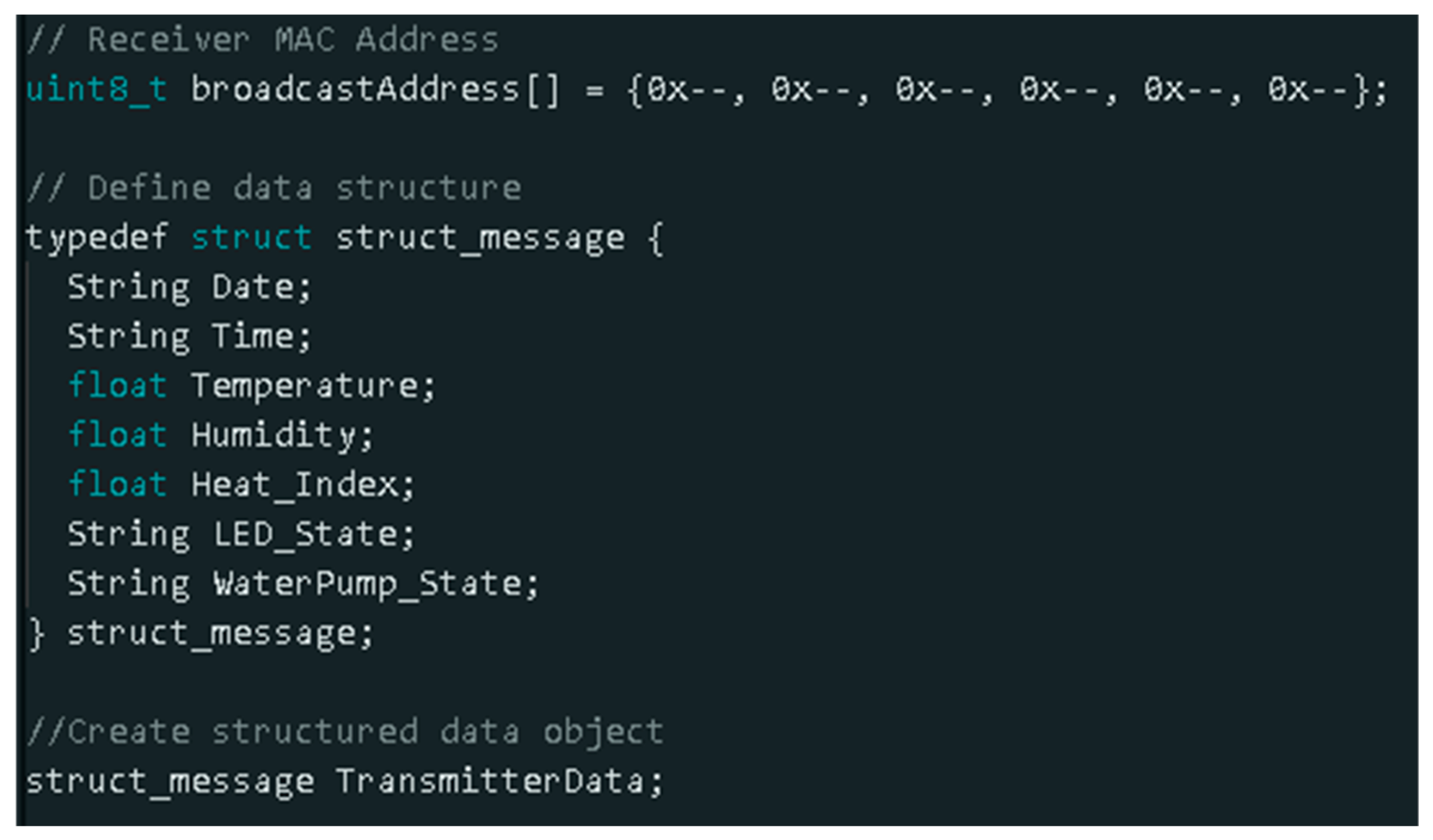
- Data collection and transmission from 2U CubeSat using the ESP-NOW technology;
- Development and deployment of a machine vision model for germination detection using Roboflow.
1.1. Review of Related Studies
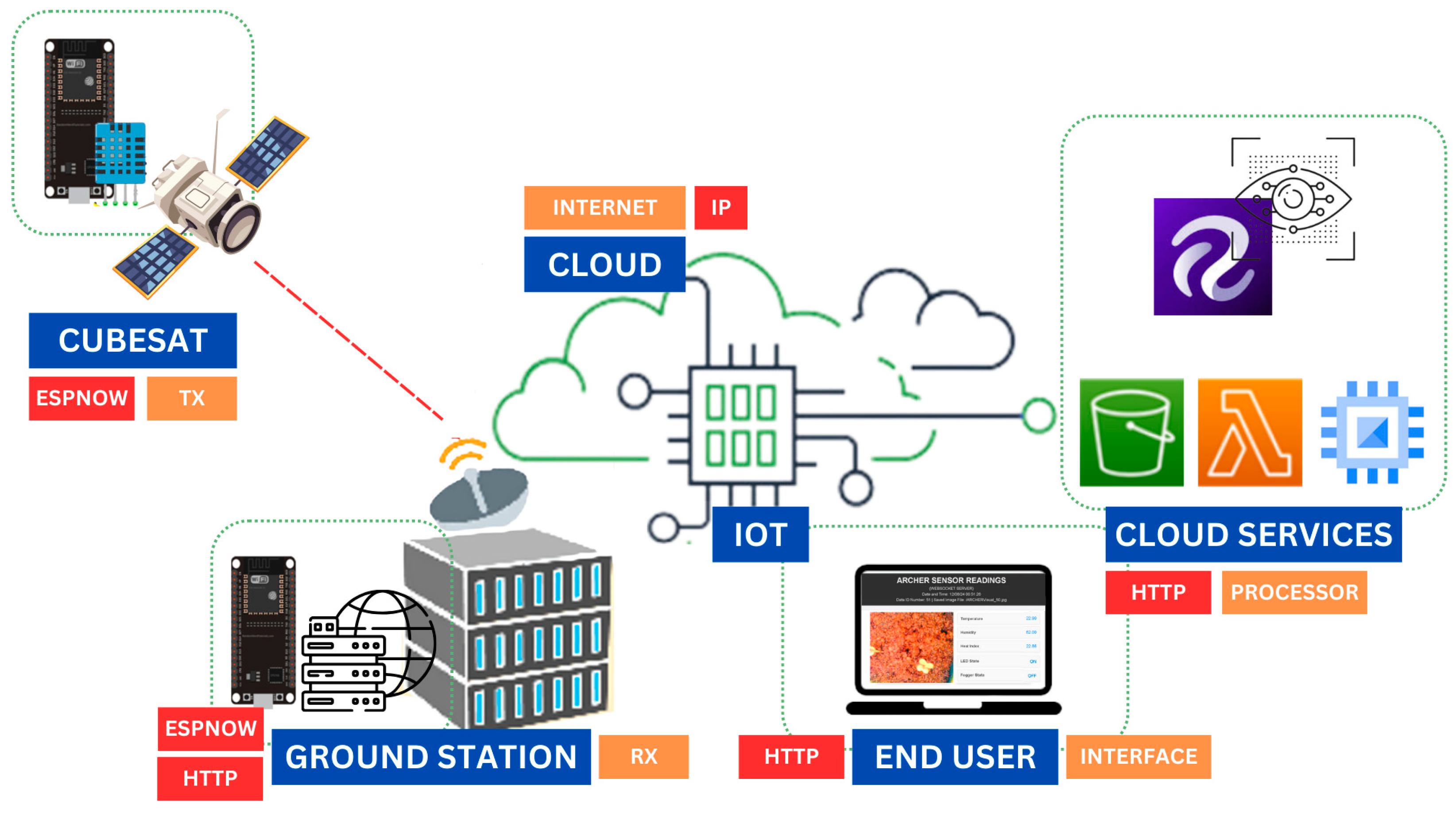
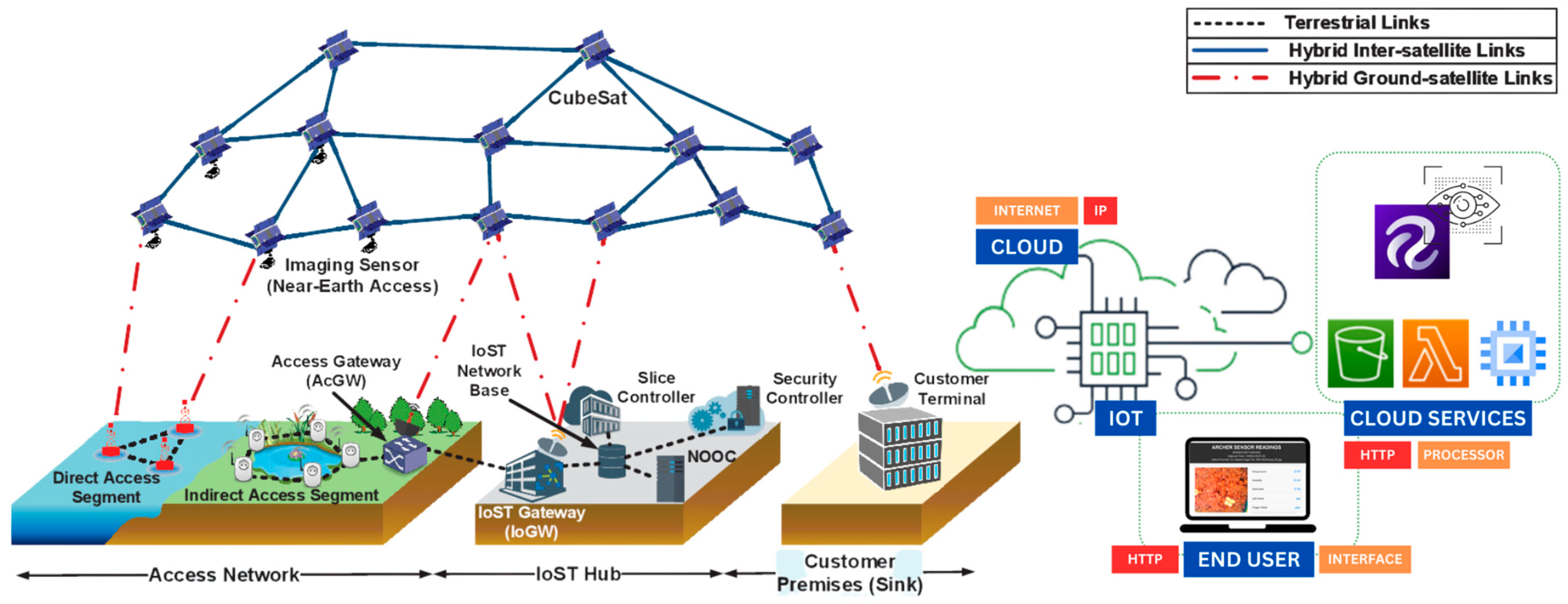
1.2. The Proposed Framework for Space Farming Data Analysis
2. Materials and Methods
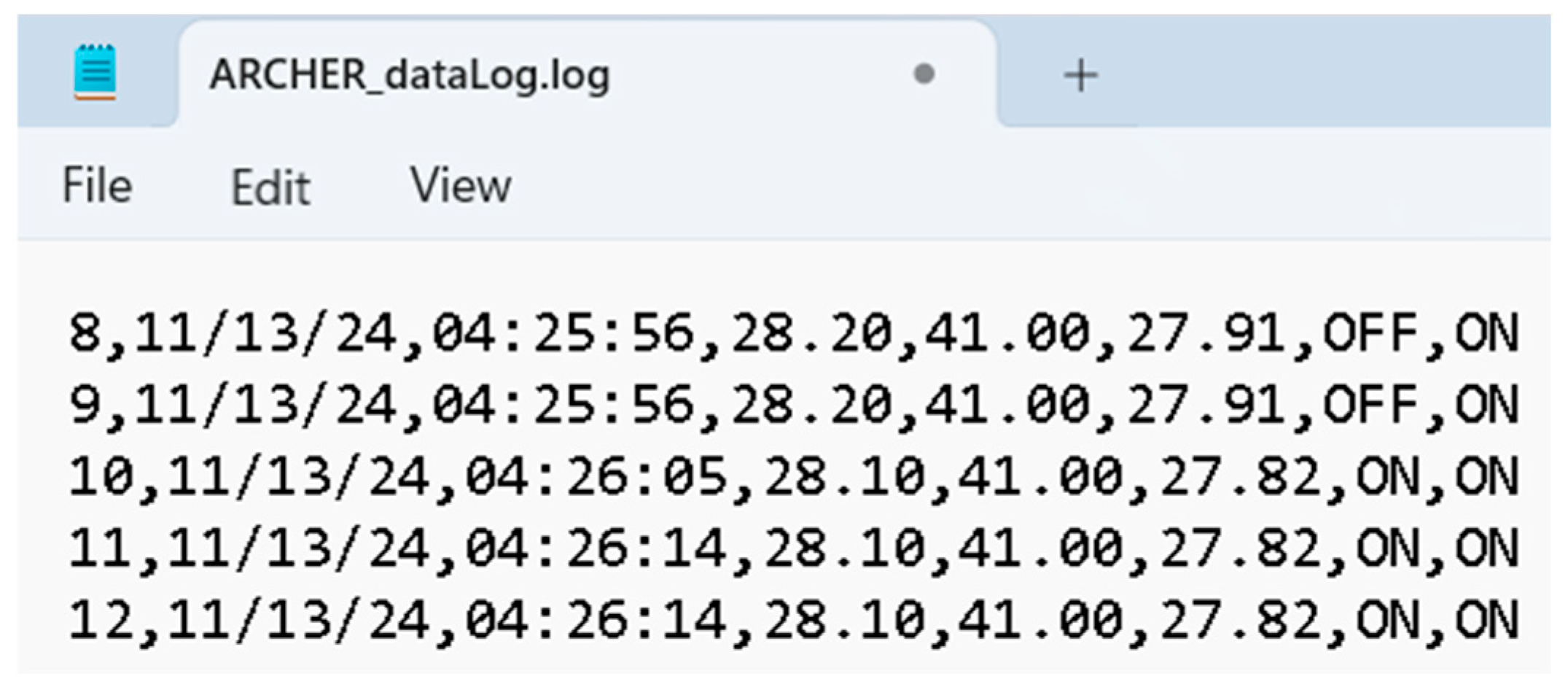
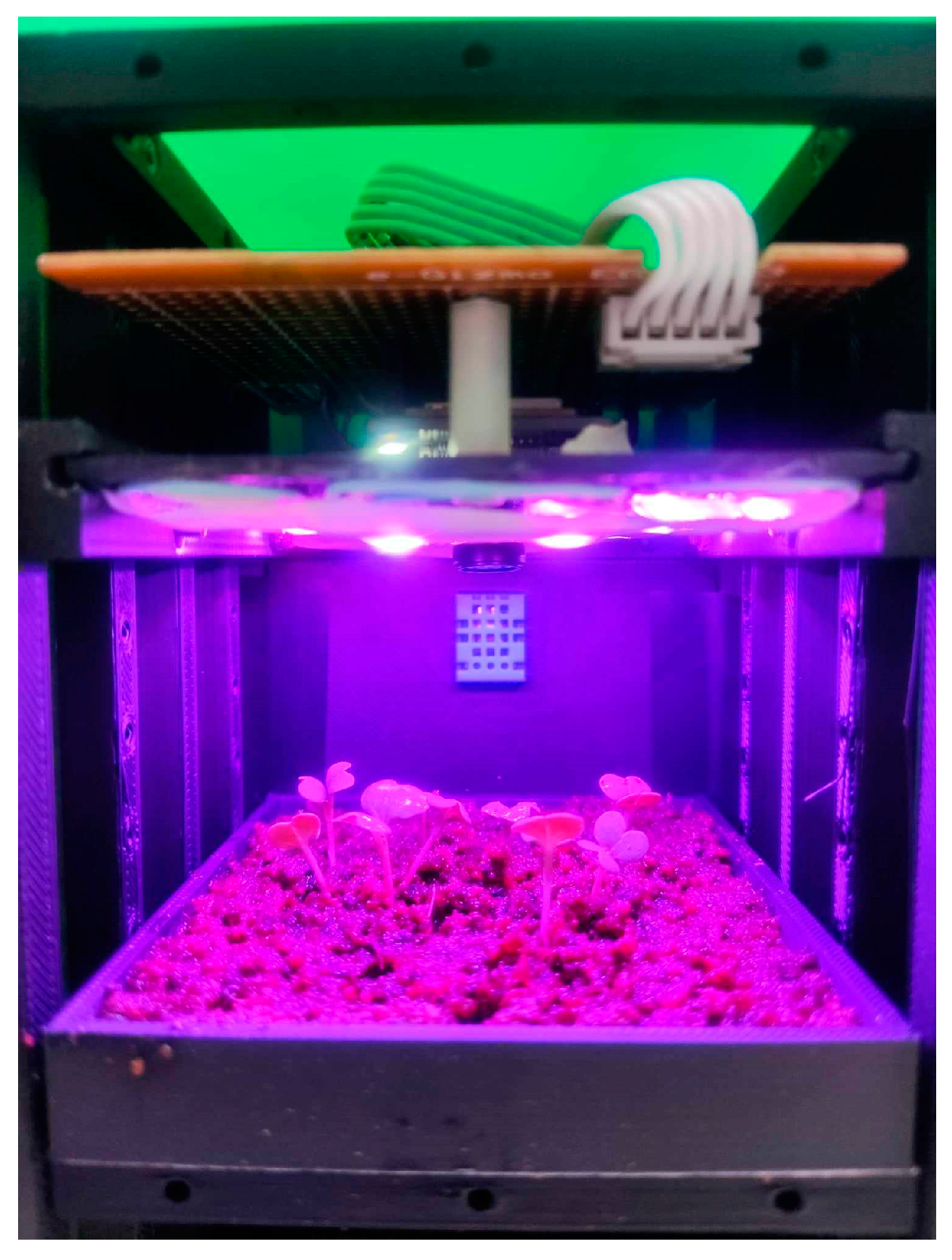
2.1. Data Collection Using the ESP32-Based System Simulation
2.2. Development of the Asynchronous Local Webserver on ESP32
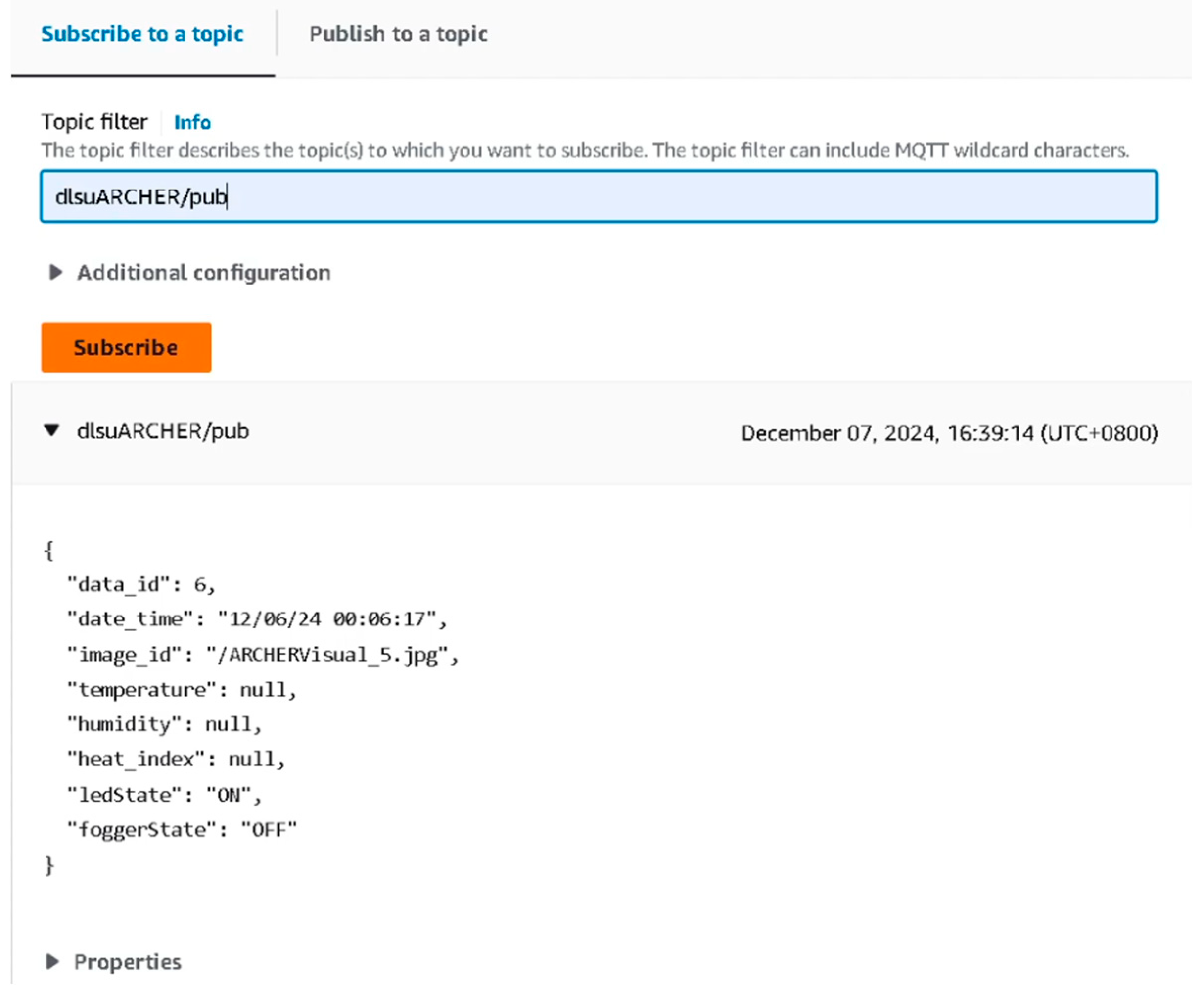
2.3. Establishment of Data Monitoring and Saving Using AWS IoT
2.4. Development of Roboflow Model for Germination Detection
3. Results and Discussions
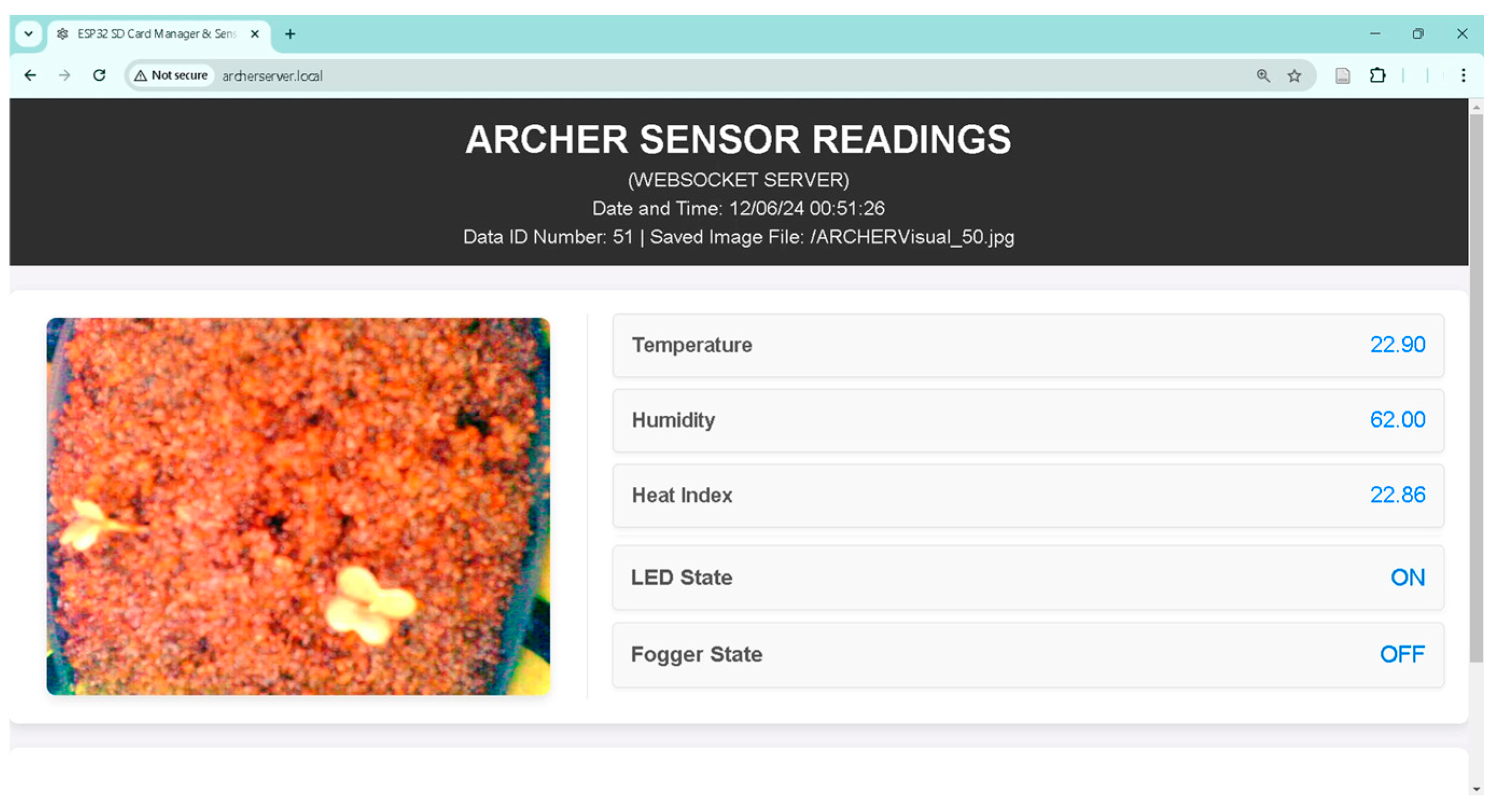
3.1. Local Webserver Based on ESP32
3.2. Secure Remote Monitoring Using AWS IoT
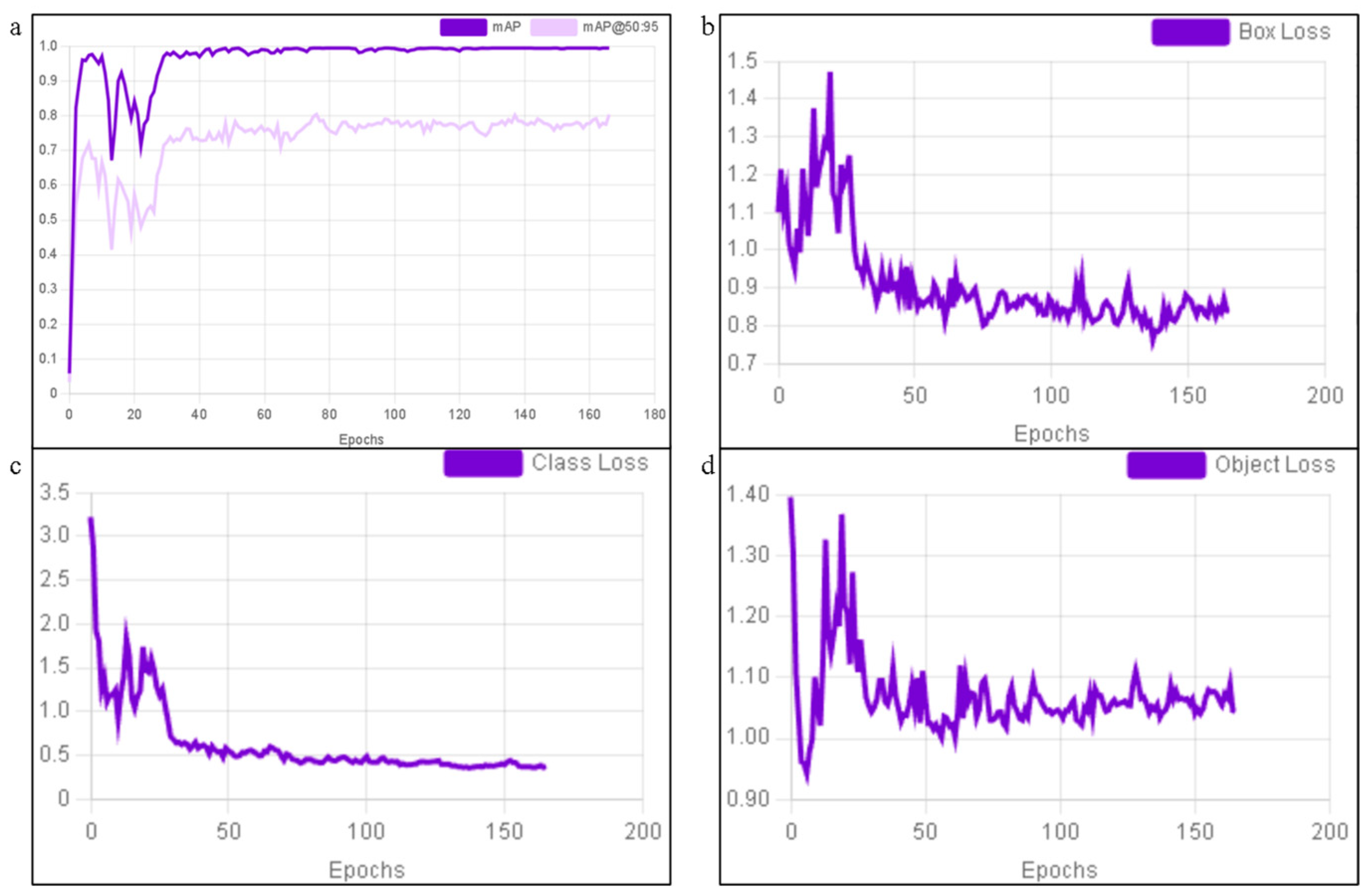
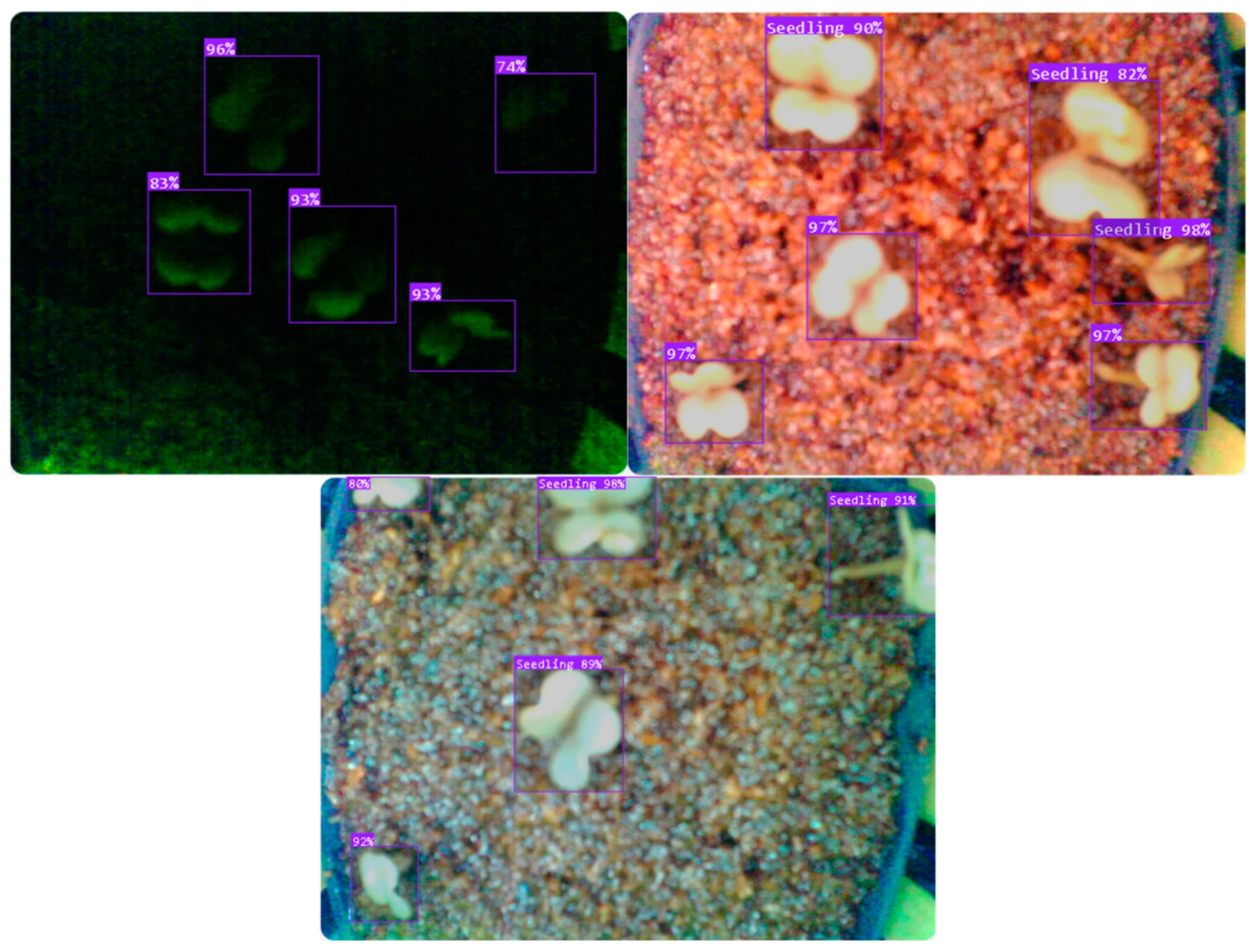
3.3. Performance and Evaluation of the Roboflow 3.0 Model for Germination Detection
4. Conclusions and Recommendations
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krakos, A. Lab-on-chip technologies for space research—Current trends and prospects. Microchim. Acta 2023, 191, 31. [Google Scholar]
- Medina, F.J. Space explorers need to be space farmers: What we know and what we need to know about plant growth in space. Mètode Sci. Stud. J.-Annu. Rev. 2021, 11, 55–62. [Google Scholar]
- Mortimer, J.C.; Gilliham, M. SpaceHort: Redesigning plants to support space exploration and on-earth sustainability. Curr. Opin. Biotechnol. 2022, 73, 246–252. [Google Scholar] [CrossRef] [PubMed]
- Puig-Suari, J.; Turner, C.; Ahlgren, W. Development of the standard CubeSat deployer and a CubeSat class PicoSatellite. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings (Cat. No. 01TH8542), Big Sky, MT, USA, 10–17 March 2001; pp. 1–347. [Google Scholar]
- Kawa, B.; Śniadek, P.; Walczak, R.; Dziuban, J. Nanosatellite Payload for Research on Seed Germination in a 3D Printed Micropot. Sensors 2023, 23, 1974. [Google Scholar] [CrossRef]
- Zhang, J.; Su, J.; Wang, C.; Sun, Y. Modular design and structural optimization of CubeSat separation mechanism. Acta Astronaut. 2024, 225, 758–767. [Google Scholar]
- Nagavarapu, S.C.; Mogan, L.B.; Chandran, A.; Hastings, D.E. CubeSats for space debris removal from LEO: Prototype design of a robotic arm-based deorbiter CubeSat. Adv. Space Res. 2024; in press. [Google Scholar] [CrossRef]
- Mahajan, H.B.; Badarla, A. Application of Internet of Things for Smart Precision Farming: Solutions & Challenge. Int. J. Adv. Sci. Technol. 2018, 2018, 37–45. [Google Scholar]
- Bhanumathi, V.; Kalaivanan, K. The Role of Geospatial Technology with IoT for Precision Agriculture. In Cloud Computing for Geospatial Big Data Analytics; Das, H., Barik, R.K., Dubey, H., Roy, D.S., Eds.; in Studies in Big Data; Springer International Publishing: Cham, Switzerland, 2019; Volume 49, pp. 225–250. [Google Scholar]
- Capogrosso, L.; Cunico, F.; Cheng, D.S.; Fummi, F.; Cristani, M. A Machine Learning-Oriented Survey on Tiny Machine Learning. IEEE Access 2024, 12, 23406–23426. [Google Scholar] [CrossRef]
- Kua, J.; Loke, S.W.; Arora, C.; Fernando, N.; Ranaweera, C. Internet of things in space: A review of opportunities and challenges from satellite-aided computing to digitally-enhanced space living. Sensors 2021, 21, 8117. [Google Scholar] [CrossRef]
- Arzo, S.T.; Sikeridis, D.; Devetsikiotis, M.; Granelli, F.; Fierro, R.; Esmaeili, M.; Akhavan, Z. Essential technologies and concepts for massive space exploration: Challenges and opportunities. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 3–29. [Google Scholar]
- Witczak, D.; Szymoniak, S. Review of Monitoring and Control Systems Based on Internet of Things. Appl. Sci. 2024, 14, 8943. [Google Scholar] [CrossRef]
- Singh, P.; Krishnamurthi, R. IoT-based real-time object detection system for crop protection and agriculture field security. J. Real-Time Image Proc. 2024, 21, 106. [Google Scholar] [CrossRef]
- Miao, J.; Rajasekhar, D.; Mishra, S.; Nayak, S.K.; Yadav, R. A Microservice-Based Smart Agriculture System to Detect Animal Intrusion at the Edge. Future Internet 2024, 16, 296. [Google Scholar] [CrossRef]
- Babu, B.R.; Khan, P.M.A.; Vishnu, S.; Raju, K.L. Design and Implementation of an IoT-Enabled Remote Surveillance Rover for Versatile Applications. In Proceedings of the 2022 IEEE Conference on Interdisciplinary Approaches in Technology and Management for Social Innovation (IATMSI), Gwalior, India, 21–23 December 2022; pp. 1–6. [Google Scholar]
- Farooq, H.; Rehman, H.U.; Javed, A.; Shoukat, M.; Dudely, S. A Review on Smart IoT Based Farming. Ann. Emerg. Technol. Comput. 2020, 4, 17–28. [Google Scholar]
- Marzioli, P.; Gugliermetti, L.; Santoni, F.; Delfini, A.; Piergentili, F.; Nardi, L.; Metelli, G.; Benvenuto, E.; Massa, S.; Bennici, E.; et al. CultCube: Experiments in autonomous in-orbit cultivation on-board a 12-units CubeSat platform. Life Sci. Space Res. 2020, 25, 42–52. [Google Scholar]
- Fortino, G.; Guerrieri, A.; Pace, P.; Savaglio, C.; Spezzano, G. IoT Platforms and Security: An Analysis of the Leading Industrial/Commercial Solutions. Sensors 2022, 22, 2196. [Google Scholar] [CrossRef]
- Debauche, O.; Mahmoudi, S.; Manneback, P.; Lebeau, F. Cloud and distributed architectures for data management in agriculture 4.0: Review and future trends. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 7494–7514. [Google Scholar]
- Liu, W.; Wu, M.; Wan, G.; Xu, M. Digital Twin of Space Environment: Development, Challenges, Applications, and Future Outlook. Remote Sens. 2024, 16, 3023. [Google Scholar] [CrossRef]
- Shymanovich, T.; Kiss, J.Z. Conducting Plant Experiments in Space and on the Moon. In Plant Gravitropism; Blancaflor, E.B., Ed.; Methods in Molecular Biology; Springer: New York, NY, USA, 2022; Volume 2368, pp. 165–198. [Google Scholar] [CrossRef]
- Jiménez, D.A.; Reyna, A.; Balderas, L.I.; Panduro, M.A. Design of 4 × 4 Low-Profile Antenna Array for CubeSat Applications. Micromachines 2023, 14, 180. [Google Scholar] [CrossRef]
- Sathasivam, M.; Hosamani, R.; Swamy, B.K. Plant responses to real and simulated microgravity. Life Sci. Space Res. 2021, 28, 74–86. [Google Scholar]
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar]
- Bandyopadhyay, S.; Foust, R.; Subramanian, G.P.; Chung, S.J.; Hadaegh, F.Y. Review of Formation Flying and Constellation Missions Using Nanosatellites. J. Spacecr. Rocket. 2016, 53, 567–578. [Google Scholar]
- Arneodo, F.; Di Giovanni, A.; Marpu, P. A Review of Requirements for Gamma Radiation Detection in Space Using CubeSats. Appl. Sci. 2021, 11, 2659. [Google Scholar] [CrossRef]
- Dixon, D.J.; Callow, J.N.; Duncan, J.M.A.; Setterfield, S.A.; Pauli, N. Satellite prediction of forest flowering phenology. Remote Sens. Environ. 2021, 255, 112197. [Google Scholar] [CrossRef]
- Carillo, P.; Morrone, B.; Fusco, G.M.; De Pascale, S.; Rouphael, Y. Challenges for a Sustainable Food Production System on Board of the International Space Station: A Technical Review. Agronomy 2020, 10, 687. [Google Scholar] [CrossRef]
- Kyriacou, M.C.; De Pascale, S.; Kyratzis, A.; Rouphael, Y. Microgreens as a component of space life support systems: A cornucopia of functional food. Front. Plant Sci. 2017, 8, 1587. [Google Scholar]
- Przybyla, C. Space aquaculture: Prospects for raising aquatic vertebrates in a B«bioregenerative life-support system on a lunar base. Front. Astron. Space Sci. 2021, 8, 699097. [Google Scholar]
- Johansen, K.; Ziliani, M.G.; Houborg, R.; Franz, T.E.; McCabe, M.F. CubeSat constellations provide enhanced crop phenology and digital agricultural insights using daily leaf area index retrievals. Sci. Rep. 2022, 12, 5244. [Google Scholar]
- Falk, K.G.; Jubery, T.Z.; Mirnezami, S.V.; Parmley, K.A.; Sarkar, S.; Singh, A.; Ganapathysubramanian, B.; Singh, A.K. Computer vision and machine learning enabled soybean root phenotyping pipeline. Plant Methods 2020, 16, 5. [Google Scholar] [CrossRef]
- Dhanya, V.G.; Subeesh, A.; Kushwaha, N.L.; Vishwakarma, D.K.; Kumar, T.N.; Ritika, G.; Singh, A.N. Deep learning based computer vision approaches for smart agricultural applications. Artif. Intell. Agric. 2022, 6, 211–229. [Google Scholar]
- Fuentes-Peñailillo, F.; Carrasco Silva, G.; Pérez Guzmán, R.; Burgos, I.; Ewertz, F. Automating Seedling Counts in Horticulture Using Computer Vision and AI. Horticulturae 2023, 9, 1134. [Google Scholar] [CrossRef]
- Mahendrakar, T.; White, R.T.; Tiwari, M.; Wilde, M. Unknown Non-Cooperative Spacecraft Characterization with Lightweight Convolutional Neural Networks. J. Aerosp. Inf. Syst. 2024, 21, 455–460. [Google Scholar] [CrossRef]
- Colmer, J.; O’neill, C.M.; Wells, R.; Bostrom, A.; Reynolds, D.; Websdale, D.; Shiralagi, G.; Lu, W.; Lou, Q.; Cornu, T.L.; et al. Methods SeedGerm: A cost-effective phenotyping platform for automated seed imaging and machine-learning based phenotypic analysis of crop seed germination. New Phytol. 2020, 228, 778–793. [Google Scholar] [PubMed]
- Thilakarathne, N.N.; Bakar, M.S.A.; Abas, P.E.; Yassin, H. Towards making the fields talks: A real-time cloud enabled iot crop management platform for smart agriculture. Front. Plant Sci. 2023, 13, 1030168. [Google Scholar]
- Paul, A.; Machavaram, R.; Kumar, D.; Nagar, H. Smart solutions for capsicum Harvesting: Unleashing the power of YOLO for Detection, Segmentation, growth stage Classification, Counting, and real-time mobile identification. Comput. Electron. Agric. 2024, 219, 108832. [Google Scholar]
- Priyadarshini, I.; Bhola, B.; Kumar, R.; So-In, C. A Novel Cloud Architecture for Internet of Space Things (IoST). IEEE Access 2022, 10, 15118–15134. [Google Scholar]
- Akyildiz, I.F.; Kak, A. The Internet of Space Things/CubeSats. IEEE Network 2019, 33, 212–218. [Google Scholar] [CrossRef]
- Fernando, A.; Lim, L.; Bandala, A.; Vicerra, R.; Dadios, E.; Guillermo, M.; Naguib, R. Simulated vs Actual Application of Symbiotic Model on Six Wheel Modular Multi-Agent System for Linear Traversal Mission. J. Adv. Comput. Intell. Intell. Inform. 2024, 28, 12–20. [Google Scholar]
- Fernando, A.H.; Guillermo, M.A.; Lim, L.A.; Bandala, A.A.; Vicerra, R.R.; Dadios, E.P.; Naguib, R.N. Load Pushing Capacity Analysis of Individual and Multi-Cooperative Mobile Robot through Symbiotic Application. Int. J. Mech. Eng. Robot. Res. 2024, 13, 304–313. [Google Scholar]
- Bedruz, R.A.R.; Maningo, J.M.Z.; Fernando, A.H.; Bandala, A.A.; Vicerra, R.R.P.; Dadios, E.P. Dynamic Peloton Formation Configuration Algorithm of Swarm Robots for Aerodynamic Effects Optimization. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Republic of Korea, 1–3 November 2019; pp. 264–267. [Google Scholar] [CrossRef]
- Pearman, J.; Suissa, A.; Klingler, M.; Fernandes, A.; Curet, O.; Zhang, X.H. Analyzing Plant Growth After a Flight to an Altitude of 30,000 Meters via a CubeSat Satellite Carried by a High-Altitude Balloon. Fla. Atl. Univ. Stud. Res. J. 2024, 8, 49–54. [Google Scholar]
- Paule, J.M.; Roca, J.R.; Subia, K.M.; Tiong, T.J.T.; Guillermo, M.; de Veas-Abuan, D. Integration of AWS and Roboflow Mask R-CNN Model for a Fully Cloud-Based Image Segmentation Platform. In Proceedings of the 2023 IEEE 15th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Coron, Palawan, Philippines, 19–23 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Pascua, A.R.A.; Rivera, M.; Guillermo, M.; Bandala, A.; Sybingco, E. Face Recognition and Identification Using Successive Subspace Learning for Human Resource Utilization Assessment. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 1375–1380. [Google Scholar] [CrossRef]
- Fernando, A.H.; Maglaya, A.B.; Ubando, A.T. Optimization of an algae ball mill grinder using artificial neural network. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 3752–3756. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, L.; Ren, X.; Li, G.; Zhang, Y. Rapid and automatic counting of sorghum seedlings from UAV images based on machine learning and deep learning. Front. Plant Sci. 2024, 15, 1399872. [Google Scholar]
- Sheng, R.T.-C.; Huang, Y.-H.; Chan, P.-C.; Bhat, S.A.; Wu, Y.-C.; Huang, N.-F. Rice Growth Stage Classification via RF-Based Machine Learning and Image Processing. Agriculture 2022, 12, 2137. [Google Scholar] [CrossRef]
- Xu, R.; Zhang, Y.; Cheng, T.; Ma, X.; Guo, W. Recognizing rice seedling growth stages to timely do field operations based on UAV imagery. Front. Plant Sci. 2022, 13, 914771. [Google Scholar]
- Agoo, J.; Lanuza, R.J.; Lee, J.; Rivera, P.A.; Velasco, N.O.; Guillermo, M.; Fernando, A. Geographic Information System-Based Framework for Sustainable Small and Medium-Sized Enterprise Logistics Operations. ISPRS Int. J. Geo-Inf. 2025, 14, 1. [Google Scholar] [CrossRef]
- Amante, K.; Ho, L.; Lay, A.; Tungol, J.; Maglaya, A.; Fernando, A. Design, fabrication, and testing of an automated machine for the processing of dried water hyacinth stalks for handicrafts. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021; IOP Publishing: Bristol, UK, 2021; Volume 1109, p. 012008. [Google Scholar]
- Fernando, A.; GanLim, L. Velocity analysis of a six wheel modular mobile robot using MATLAB-Simulink. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021; IOP Publishing: Bristol, UK, 2021; Volume 1109. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Library Header | Function |
|---|---|
| WiFi.h | Provides functions to connect the ESP32 to a Wi-Fi network, enabling network communication. |
| WebServer.h | Allows the ESP32 to act as a web server, handling HTTP requests and serving web pages and files. |
| WebSocketsServer.h | Enables real-time, bidirectional communication between the ESP32 and the client via WebSockets. |
| FS.h | Provides file system functionality for managing files on the ESP32’s internal flash memory. |
| LittleFS.h | A lightweight file system is used for storing files (e.g., images) on the ESP32’s internal storage. |
| ArduinoJson.h | Used to format and parse JSON data for easy transmission between the ESP32 and the client. |
| Category | Parameter | Details |
|---|---|---|
| Preprocessing | Auto-Orient | Applied |
| Resize | Stretch to 640 × 640 | |
| Augmentations | Outputs per Training Example | 2 |
| Grayscale | Apply to 100% of images | |
| Saturation | Between −72% and +72% | |
| Brightness | Between −38% and +38% | |
| Blur | Up to 2.1px | |
| Noise | Up to 1.6% of pixels |
| Statistics Parameters | Training Dataset | Actual Seedling | Detected Seedling |
|---|---|---|---|
| Mean | 67.5 | 2.947761 | 2.947761 |
| Standard Error | 3.354102 | 0.172552 | 0.172552 |
| Median | 67.5 | 3 | 3 |
| Mode | N/A | 3 | 3 |
| Standard Deviation | 38.82654 | 1.997431 | 1.997431 |
| Sample Variance | 1507.5 | 3.989732 | 3.989732 |
| Kurtosis | −1.2 | −1.251445 | −1.251445 |
| Skewness | 2.03 × 10−17 | −0.001745 | −0.001745 |
| Range | 133 | 6 | 6 |
| Minimum | 1 | 0 | 0 |
| Maximum | 134 | 6 | 6 |
| Sum | 9045 | 395 | 395 |
| Count | 134 | 134 | 134 |
| Confidence Level (98.0%) | 7.897945 | 0.40631 | 0.40631 |
| Statistics Parameters | Validation Dataset | Actual Seedling | Detected Seedling |
|---|---|---|---|
| Mean | 152.5 | 2.65 | 2.6 |
| Standard Error | 1.322876 | 0.334625 | 0.327671 |
| Median | 152.5 | 3 | 3 |
| Mode | N/A | 4 | 1 |
| Standard Deviation | 5.91608 | 1.496487 | 1.46539 |
| Sample Variance | 35 | 2.239474 | 2.147368 |
| Kurtosis | −1.2 | −1.168687 | −1.021609 |
| Skewness | 0 | −0.060463 | 0.00446 |
| Range | 19 | 5 | 5 |
| Minimum | 143 | 0 | 0 |
| Maximum | 162 | 5 | 5 |
| Sum | 3050 | 53 | 52 |
| Count | 20 | 20 | 20 |
| Confidence Level (98.0%) | 3.35942 | 0.849774 | 0.832116 |
| Statistics Parameters | Testing Dataset | Actual Seedling | Detected Seedling |
|---|---|---|---|
| Mean | 138.5 | 4 | 4 |
| Standard Error | 0.866025 | 0.944911 | 0.944911 |
| Median | 138.5 | 5.5 | 5.5 |
| Mode | N/A | 6 | 6 |
| Standard Deviation | 2.44949 | 2.672612 | 2.672612 |
| Sample Variance | 6 | 7.142857 | 7.142857 |
| Kurtosis | −1.2 | −1.01584 | −1.01584 |
| Skewness | 0 | −0.957864 | −0.957864 |
| Range | 7 | 6 | 6 |
| Minimum | 135 | 0 | 0 |
| Maximum | 142 | 6 | 6 |
| Sum | 1108 | 32 | 32 |
| Count | 8 | 8 | 8 |
| Confidence Level (98.0%) | 2.596302 | 2.832798 | 2.832798 |
| Actual Seedling | Background | |
|---|---|---|
| predicted seedling | 395 | 1 |
| background | 1 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janairo, A.G.; Concepcion, R., II; Guillermo, M.; Fernando, A. A Cloud Computing Framework for Space Farming Data Analysis. AgriEngineering 2025, 7, 149. https://doi.org/10.3390/agriengineering7050149
Janairo AG, Concepcion R II, Guillermo M, Fernando A. A Cloud Computing Framework for Space Farming Data Analysis. AgriEngineering. 2025; 7(5):149. https://doi.org/10.3390/agriengineering7050149
Chicago/Turabian StyleJanairo, Adrian Genevie, Ronnie Concepcion, II, Marielet Guillermo, and Arvin Fernando. 2025. "A Cloud Computing Framework for Space Farming Data Analysis" AgriEngineering 7, no. 5: 149. https://doi.org/10.3390/agriengineering7050149
APA StyleJanairo, A. G., Concepcion, R., II, Guillermo, M., & Fernando, A. (2025). A Cloud Computing Framework for Space Farming Data Analysis. AgriEngineering, 7(5), 149. https://doi.org/10.3390/agriengineering7050149