
Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control





Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Cases
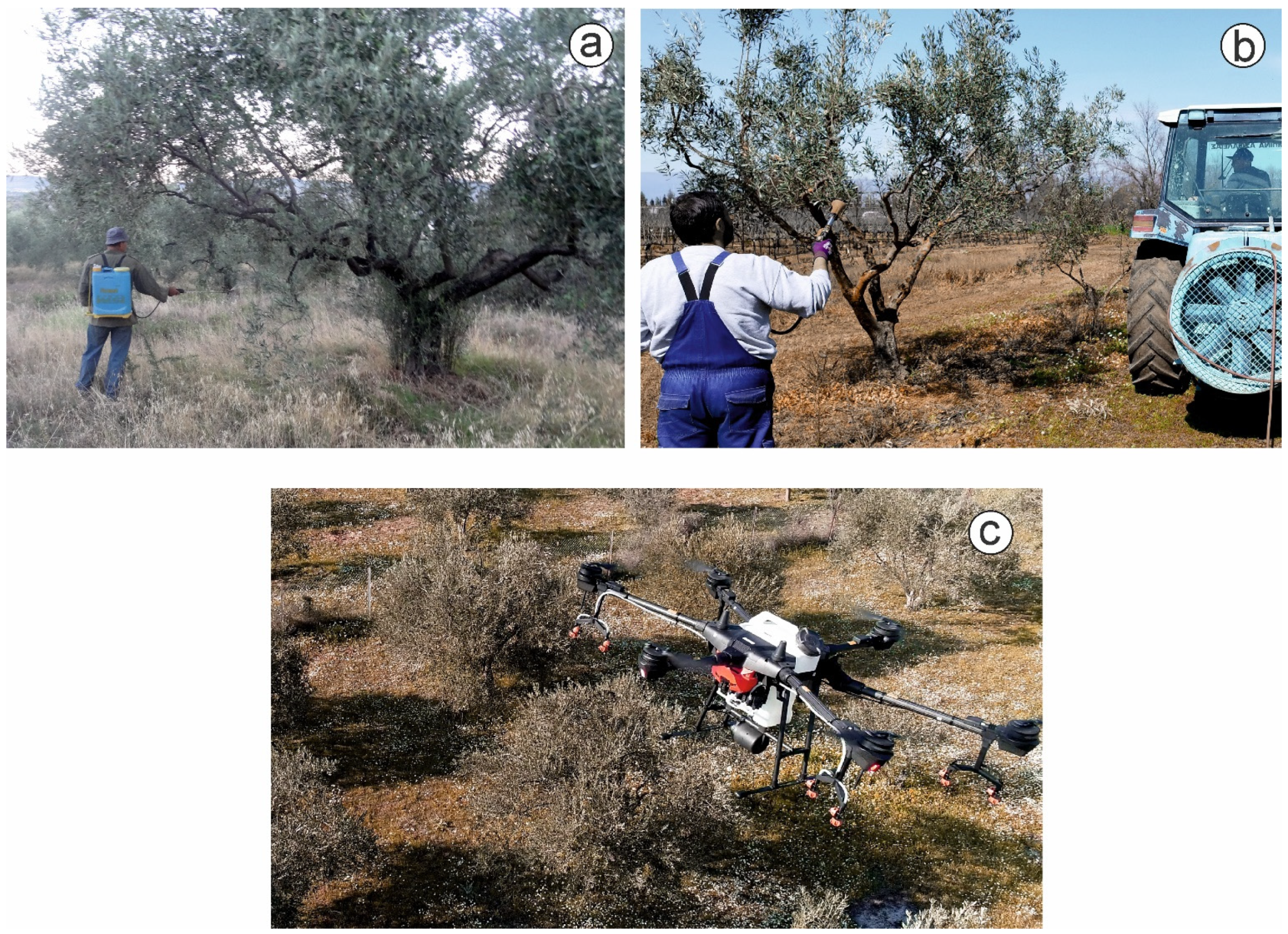
2.1.1. Traditional Method with Backpack Sprayers
2.1.2. Traditional Method with Tractor-Mounted Sprayer and Workers Handling Lances
2.1.3. Novel Method with a UAV
2.1.4. Hypothetical Common Base Scenario
2.2. Economic Model
2.2.1. Labor
2.2.2. Capital Spending
2.2.3. Repairs and Maintenance

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RF1 | RF2 | ||
| Sprayers | 0.410 | 0.005 | |
| Tractor | 1.300 | 2.000 |
2.2.4. Energy Costs
2.2.5. Licenses, Fees and Taxes
2.2.6. Storage
2.2.7. Surveillance and Georeferencing (for the UAV Method Only)
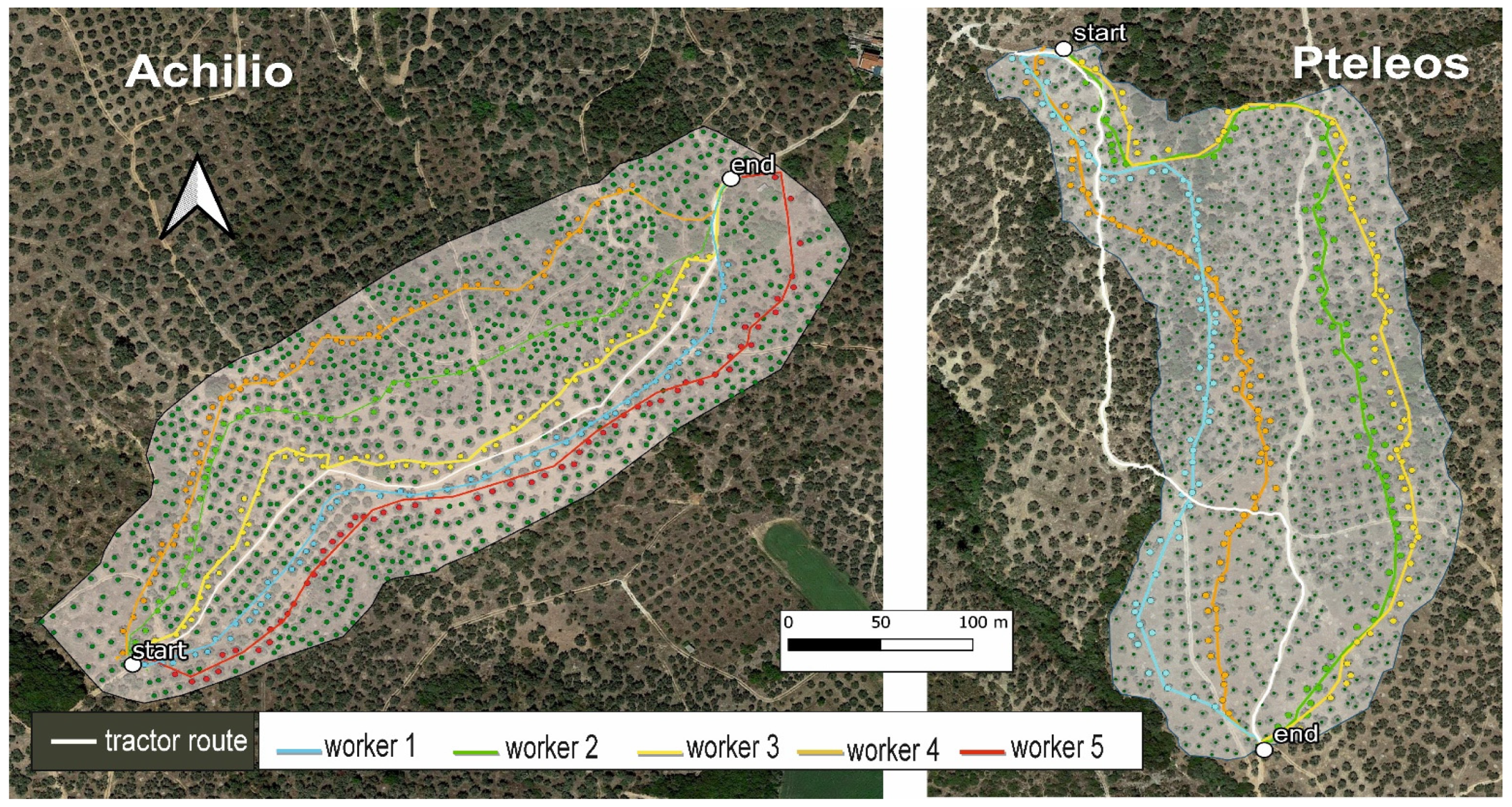
2.3. Geospatial and Statistical Analysis
3. Results
3.1. Case Comparisons
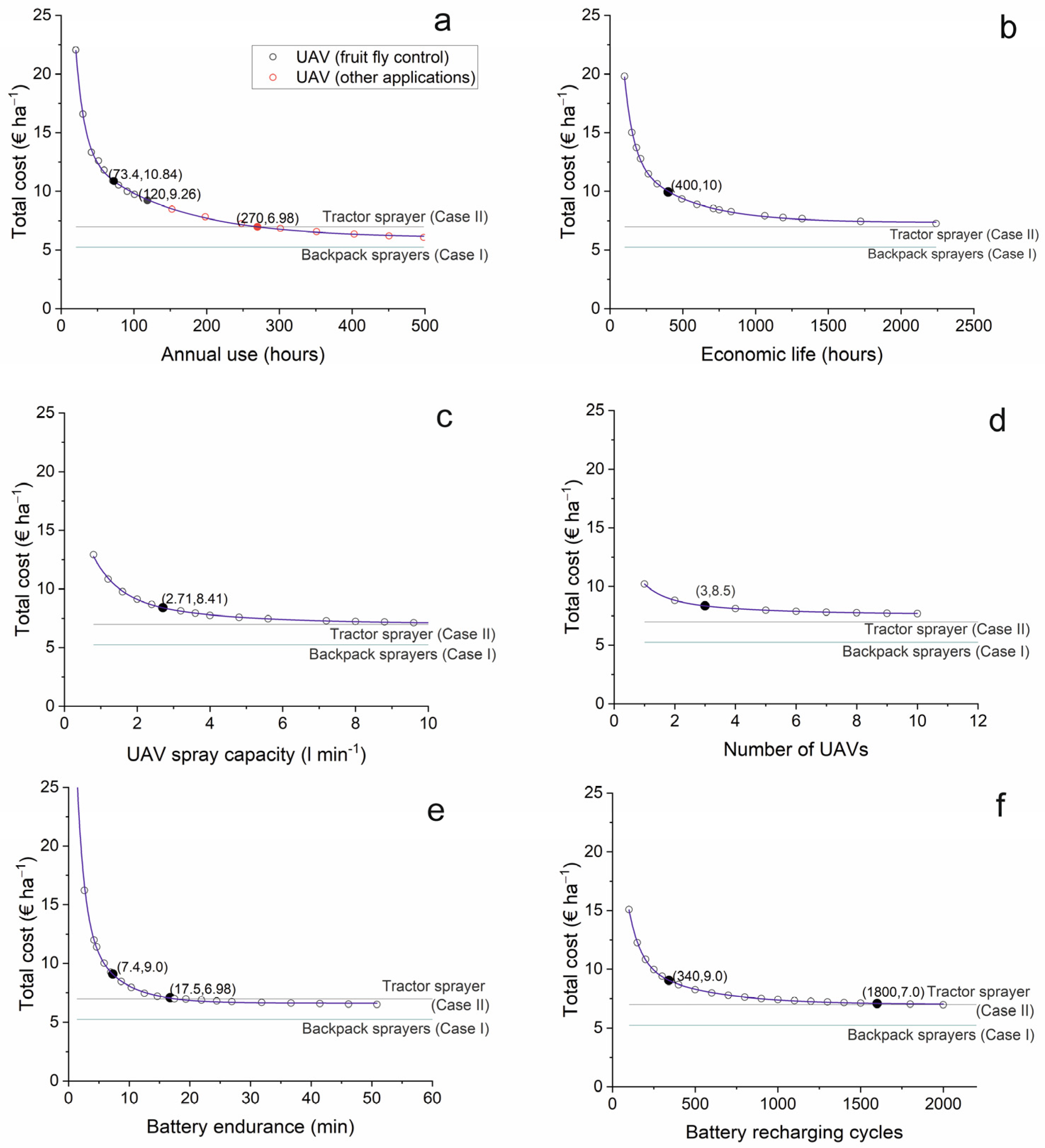
3.2. Sensitivity Analysis for Case III
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anagnostis, A.; Tagarakis, A.C.; Kateris, D.; Moysiadis, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Orchard mapping with deep learning semantic segmentation. Sensors 2021, 21, 3813. [Google Scholar] [CrossRef] [PubMed]
- Tagarakis, A.C.; Filippou, E.; Kalaitzidis, D.; Benos, L.; Busato, P.; Bochtis, D. Proposing UGV and UAV Systems for 3D Mapping of Orchard Environments. Sensors 2022, 22, 1571. [Google Scholar] [CrossRef] [PubMed]
- Sylvester, G. (Ed.) E-Agriculture in Action: Drones for Agriculture; Food and Agriculture Organization of the United NationsandInternational Telecommunication Union: Bangkok, Thailand, 2018; ISBN 978-92-5-130246-0s. [Google Scholar]
- SESAR. European Drones Outlook Study; SESAR: Brussels, Belgium, 2016; pp. 1–93. [Google Scholar]
- Morales-Rodríguez, P.A.; Cano, E.C.; Villena, J.; López-Perales, J.A. A Comparison between Conventional Sprayers and New UAV Sprayers: A Study Case of Vineyards and Olives in Extremadura (Spain). Agronomy 2022, 12, 1307. [Google Scholar] [CrossRef]
- Tzanakakis, M.E. Insects and Mites Feeding on Olive: Distribution, Importance, Habits, Seasonal Development, and Dormancy. Insects Mites Feed. Olive 2006, 1. [Google Scholar] [CrossRef]
- Kalaitzaki, A.; Ioannou, A.; Kapogia, E.; Kostas, P. Bait Sprays: Area Wide Control Program against Bactrocera oleae in Greece. Integr. Prot. Olive Crops IOBC-WPRS Bull. 2014, 108, 91–93. [Google Scholar]
- Pontikakos, C.M.; Tsiligiridis, T.A.; Yialouris, C.P.; Kontodimas, D.C. Pest management control of olive fruit fly (Bactrocera oleae) based on a location-aware agro-environmental system. Comput. Electron. Agric. 2012, 87, 39–50. [Google Scholar] [CrossRef]
- Xiao, Q.; Du, R.; Yang, L.; Han, X.; Zhao, S.; Zhang, G.; Fu, W.; Wang, G.; Lan, Y. Comparison of droplet deposition control efficacy on phytophthora capsica and aphids in the processing pepper field of the unmanned aerial vehicle and knapsack sprayer. Agronomy 2020, 10, 215. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Dengeru, Y.; Ramasamy, K.; Allimuthu, S.; Balakrishnan, S.; Kumar, A.P.M.; Kannan, B.; Karuppasami, K.M. Study on Spray Deposition and Drift Characteristics of UAV Agricultural Sprayer for Application of Insecticide in Redgram Crop (Cajanus cajan L. Millsp.). Agronomy 2022, 12, 3196. [Google Scholar] [CrossRef]
- Dou, Z.; Fang, Z.; Han, X.; Liu, Y.; Duan, L.; Zeeshan, M.; Arshad, M. Comparison of the Effects of Chemical Topping Agent Sprayed by a UAV and a Boom Sprayer on Cotton Growth. Agronomy 2022, 12, 1625. [Google Scholar] [CrossRef]
- Arakawa, T.; Kamio, S. Control Efficacy of UAV-Based Ultra-Low-Volume Application of Pesticide in Chestnut Orchards. Plants 2023, 12, 2597. [Google Scholar] [CrossRef] [PubMed]
- Hanif, A.S.; Han, X.; Yu, S.H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Cavalaris, C. Chapter 10—Energy efficiency for in-farm unmanned aerial system applications. In Unmanned Aerial Systems in Agriculture; Bochtis, D., Tagarakis, A.C., Kateris, D., Eds.; Academic Press: Cambridge, MA, USA, 2023; pp. 231–244. ISBN 978-0-323-91940-1. [Google Scholar]
- Gertsis, A.; Karampekos, L. Evaluation of Spray Coverage and Other Spraying Characteristics from Ground and Aerial Sprayers (Drones: UAVs) Used in a High-Density Planting Olive Grove in Greece. In Information and Communication Technologies for Agriculture—Theme IV: Actions; Bochtis, D.D., Pearson, S., Lampridi, M., Marinoudi, V., Pardalos, P.M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 255–268. ISBN 978-3-030-84156-0. [Google Scholar]
- DJI Agras T16 User manual V 1.4. Available online: https://dl.djicdn.com/downloads/t16/20200520/T16_User_Manual_v1.4_EN.pdf (accessed on 23 September 2023).
- Srivastava, A.K.; Goering, C.E.; Rohrbach, R.P.; Buckmaster, D.R. (Eds.) Chemical application. In Engineering Principles of Agricultural Machines; ASABE: Michigan, MI, USA, 2006; pp. 269–322. ISBN 1-892769-50-6. [Google Scholar]
- Agricultural Machinery Management EP496.3. In ASABE Standards; American Society of Agricultural and Biological Engineers: Michigan, MI, USA, 2009.
- Agricultural Machinery Management Data. D497.5. In ASABE Standards; American Society of Agricultural and Biological Engineers: Michigan, MI, USA, 2009.
- Borgogno Mondino, E.; Gajetti, M. Preliminary considerations about costs and potential market of remote sensing from UAV in the Italian viticulture context. Eur. J. Remote Sens. 2017, 50, 310–319. [Google Scholar] [CrossRef]
- Drones: Total Cost of Ownwrship (TCO). Available online: https://www.auav.com.au/articles/drones-total-cost-ownership-tco/ (accessed on 23 September 2023).
- Pedersen, S.M.; Medici, M.; Anken, T.; Tohidloo, G.; Pedersen, M.F.; Carli, G.; Canavari, M.; Tsiropoulos, Z.; Fountas, S. Financial and Environmental Performance of Integrated Precision Farming Systems. In Proceedings of the Precision Agriculture’19; Stafford, J.V., Ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 833–839. [Google Scholar]
- Petritoli, E.; Leccese, F.; Ciani, L.; Roma, S.; Navale, V. Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors 2018, 18, 3171. [Google Scholar] [CrossRef] [PubMed]
- Rigotte, M.R.; Secco, D.; Rosa, H.A.; de Souza, S.N.M.; Santos, R.F.; Gurgacz, F.; da Silva, T.R.B. Energy efficiency of engine-generator set using biofuels under varied loads. Renew. Sustain. Energy Rev. 2017, 79, 520–524. [Google Scholar] [CrossRef]
- Cavalaris, C.; Karamoutis, C.; Markinos, A. Efficacy of cotton harvest aids applications with unmanned aerial vehicles (UAV) and ground-based field sprayers—A case study comparison. Smart Agric. Technol. 2022, 2, 100047. [Google Scholar] [CrossRef]




| Backpack Sprayers | Tractor Sprayer with Lances | Spraying with UAV | |
|---|---|---|---|
| (Case I) | (Case II) | (Case III) | |
| Number of workers | 6 [a] | 2 [b] | 2 |
| Droplet size (μm) | 500 | 500 | 128 |
| Nozzle capacity (L min−1) | 3.00 | 6.60 | 0.45 |
| Spray dose (L ha−1) | 15.0 | 15.0 | 3.4 |
| Spray tank capacity (L)/% fill | 18/100% | 500/100% | 16/52% |
| Trees sprayed with one tank | 60 | 1670 | 108 |
| Total time for applying one tank (min) * | 24.2 | 240.0 | 16.6 |
| Number of tanks applied daily | 4 × 10 | 1 | 14 |
| Hectares covered per workshop, daily (ha day−1) | 48.1 | 33.4 | 30.2 |
| Backpack Sprayers | Tractor Sprayer with Lances | Spraying with UAV | ||
|---|---|---|---|---|
| (Case I) | (Case II) | (Case III) | ||
| Purchase price (EUR): | Spraying unit | 50 [a] | 8000 [b] | 9900 [c] |
| Tractor/Truck | 30,000 | 45,000 | 20,000 [d] | |
| UAV battery | 1100 | |||
| Power station | 1500 | |||
| RTK GPS | 2500 | |||
| Theoretical economic life (h): | Spraying unit | 3000 [a] | 1500 [b] | 5 [c] (years) |
| Tractor/truck | 16,000 | 16,000 | 15,000 [d] (hours) | |
| UAV battery | 116 (hours) | |||
| Power station | 5 (years) | |||
| RTK GPS | 10 (years) | |||
| Annual use (h): | Spraying unit | 73 [a] | 129 [b] | 76 [c] |
| Tractor/truck | 40.0 | 139.5 | 3 [d] | |
| UAV batteries | 76 | |||
| Power station | 116 | |||
| RTK GPS | 78 | |||
| Remaining value (% purchase price) | Spraying unit | 0 | 10 | 20 |
| Tractor/truck | 10 | 10 | 10 | |
| UAV battery | 0 | |||
| Power station | 20 | |||
| RTK GPS | 20 |
| Cost of Use (EUR ha−1) | |||
|---|---|---|---|
| Backpack Sprayers | Tractor Sprayer with Lances | Spraying with UAV | |
| Labour | 4.93 | 3.66 | 3.20 |
| Capital spending | 0.08 | 1.39 | 4.06 |
| Repairs and Maintenance | 0.05 | 0.82 | 1.86 |
| Energy | 0.12 | 1.24 | 0.32 |
| Licencies, fees and taxes | 0.05 | 0.11 | 0.74 |
| Storage | 0.00 | 0.03 | 0.04 |
| Surveilanance and georeferencing | - | - | 0.20 |
| Total | 5.24 | 7.24 | 10.41 |
| Capital Spending (EUR ha−1) | |||
|---|---|---|---|
| Backpack Sprayers (Case I) | Tractor Sprayer with Lance Worker (Case II) | Spraying with UAV (Case III) | |
| Spraying unit | 0.001 | 0.87 | 2.22 |
| Tractor/truck | 0.084 | 0.52 | 0.01 |
| UAV batteries | 1.04 | ||
| Power station | 0.34 | ||
| RTK base station | 0.30 | ||
| Break-Even Points for (x) | |||
|---|---|---|---|
| Parameter (x) | Model for Total Cost y (EUR ha−1) | Case I | Case II |
| UAV pilot wage (€) | y = 0.028x + 6.77 | na * | na |
| UAV purchace price (€) | y = 0.0003x + 6.74 | na | 590 |
| Annual use (h) | y = 49.37(−x/11.7) + 8.59(−x/122.65) + 6.02 | na | 270 |
| Economic life (h) | y = 36.14(−x/60.19) + 7.12(−x/397.01) + 7.35 | na | na |
| UAV Remaining value (%) | y = −0.792x + 8.12 | na | na |
| UAV Spray capacity (l min−1) | y = 11.33(−x/0.69) + 2.79(−x/3) + 7.02 | na | na |
| Droplet size (μm) | y = 0.013x + 6.27 | na | 53 |
| Drift (%) | y = 0.018x + 7.74 | na | na |
| Operating per backup UAV | y = 6.06(−x/0.67) + 1.67(−x/3.23) + 7.61 | na | na |
| Battery purchase price (€) | y = 0.001x + 6.47 | na | 360 |
| Battery endurance (min) | y = 38.81(−x/1.21) + 8.9(−x/5.51) + 6.6 | na | 17.5 |
| Battery recharging cycles | y = 19.15(−x/70.7) + 4.36exp(-x/410) + 6.99 | na | 1800 |
| Failure rate | y = 23.029x + 7.81 | na | na |
| UAV R&M costs (%pp) | y = 0.009x + 7.5 | na | na |
| Taxes and fees (%pp) | y = 0.107x + 7.24 | na | na |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cavalaris, C.; Tagarakis, A.C.; Kateris, D.; Bochtis, D. Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control. AgriEngineering 2023, 5, 1925-1942. https://doi.org/10.3390/agriengineering5040118
Cavalaris C, Tagarakis AC, Kateris D, Bochtis D. Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control. AgriEngineering. 2023; 5(4):1925-1942. https://doi.org/10.3390/agriengineering5040118
Chicago/Turabian StyleCavalaris, Chris, Aristotelis C. Tagarakis, Dimitrios Kateris, and Dionysis Bochtis. 2023. "Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control" AgriEngineering 5, no. 4: 1925-1942. https://doi.org/10.3390/agriengineering5040118
APA StyleCavalaris, C., Tagarakis, A. C., Kateris, D., & Bochtis, D. (2023). Cost Analysis of Using UAV Sprayers for Olive Fruit Fly Control. AgriEngineering, 5(4), 1925-1942. https://doi.org/10.3390/agriengineering5040118