
Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning

 ,
,  ,
, 


Abstract
:1. Introduction
2. Background
2.1. Micromobility Expansion in Cities
2.2. Micromobility Safety Issues
2.3. NVIDIA Semantic Segmentation
2.4. YOLOv5
2.5. Bikeable
2.6. OpenRouteService and OpenStreetMap
3. Materials and Methods
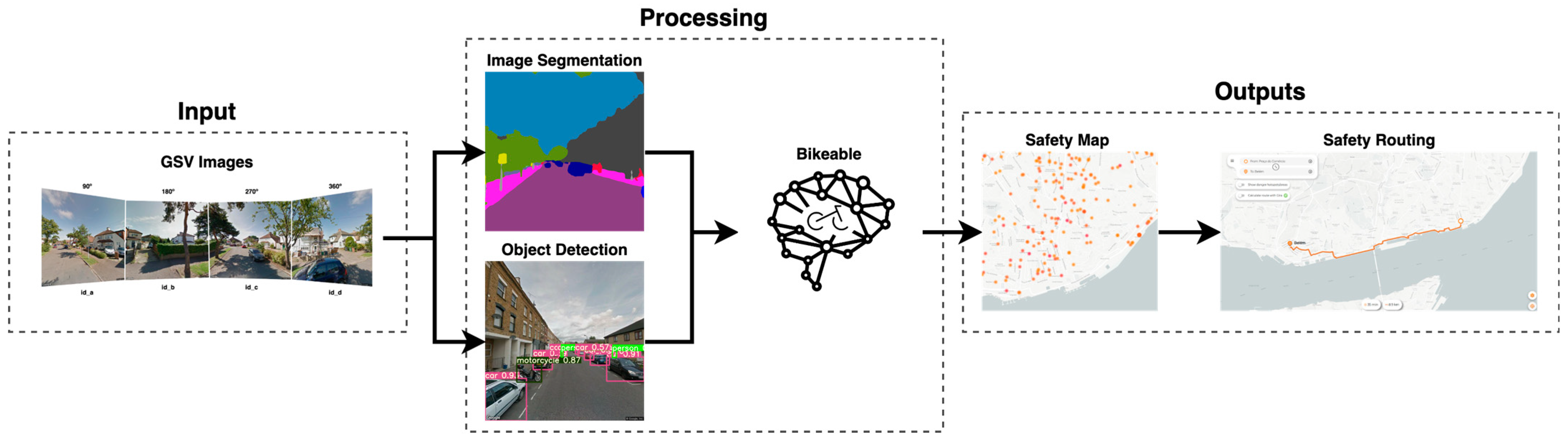
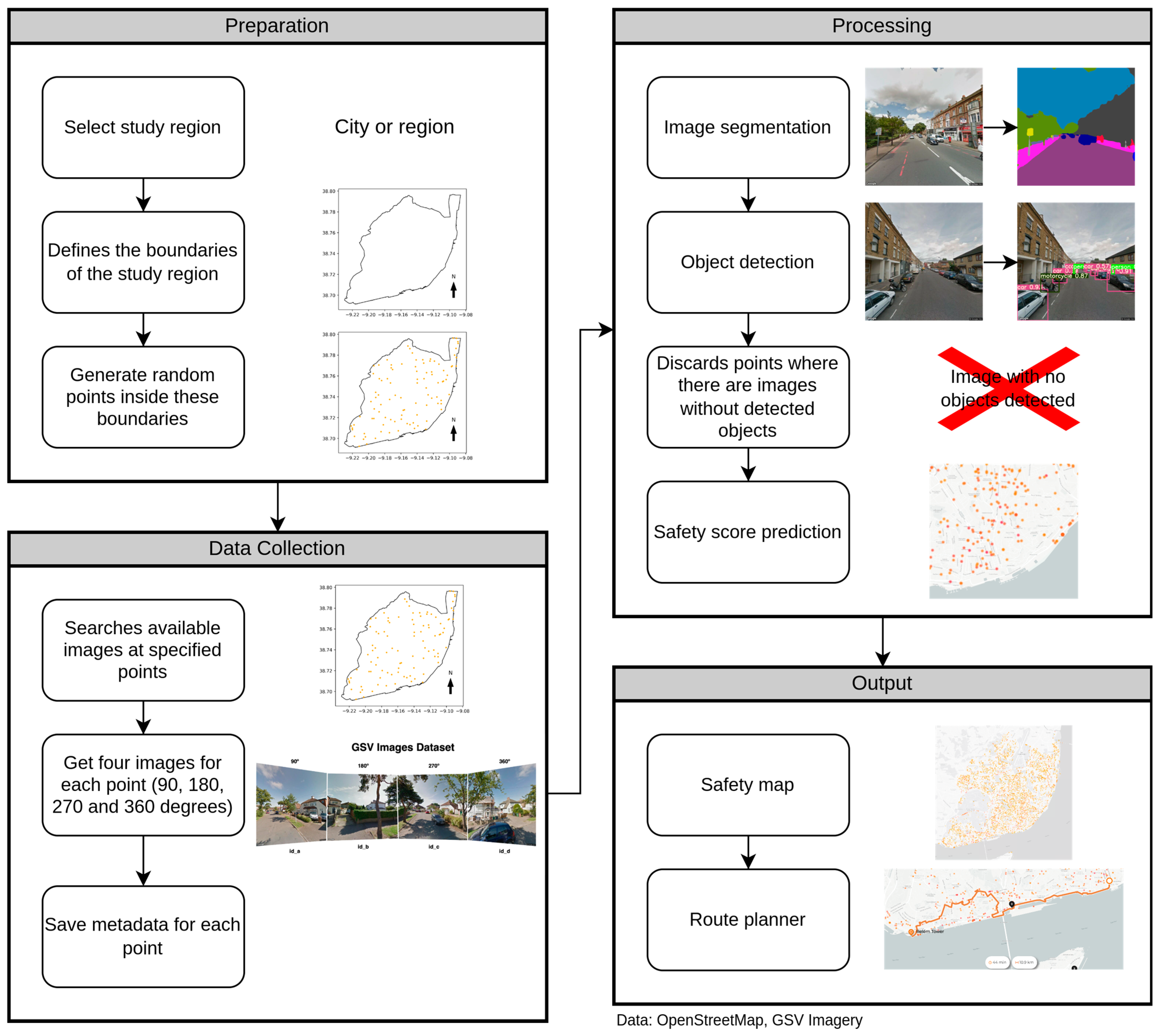
- Preparation: The study zone was selected in this stage, and boundaries are defined based on the geographic data of the region under analysis. Random latitude and longitude coordinates were generated using a uniform distribution.
- Data Collection: Using the GSV API, the data (images) necessary for processing were collected. The API retrieved four images for each generated location, capturing the full surroundings at 90, 180, 270, and 360 degrees. The API was specified to retrieve outdoor images only. Metadata, such as coordinates and the date of the image, was extracted, and metadata and images were saved for further processing.
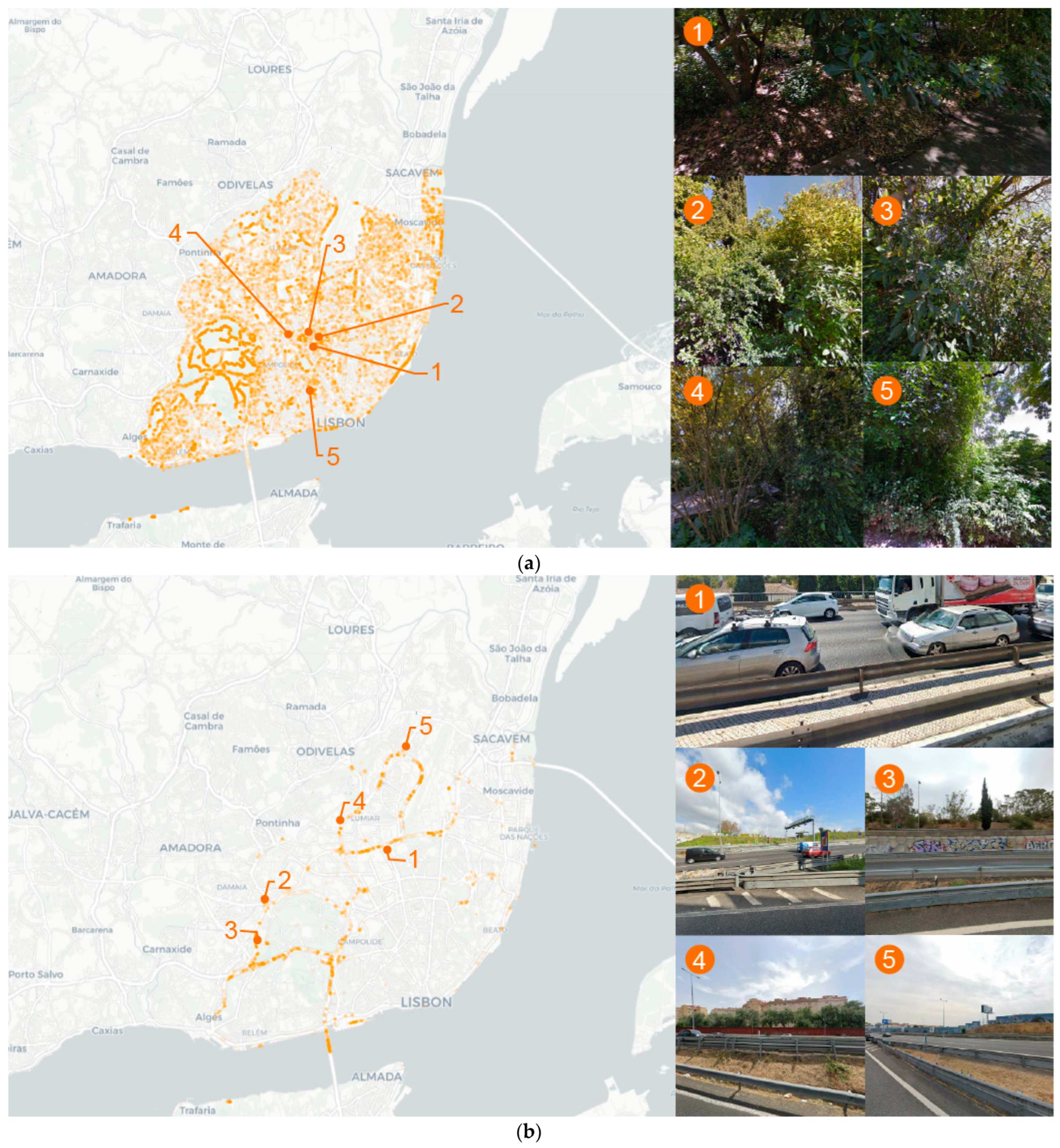
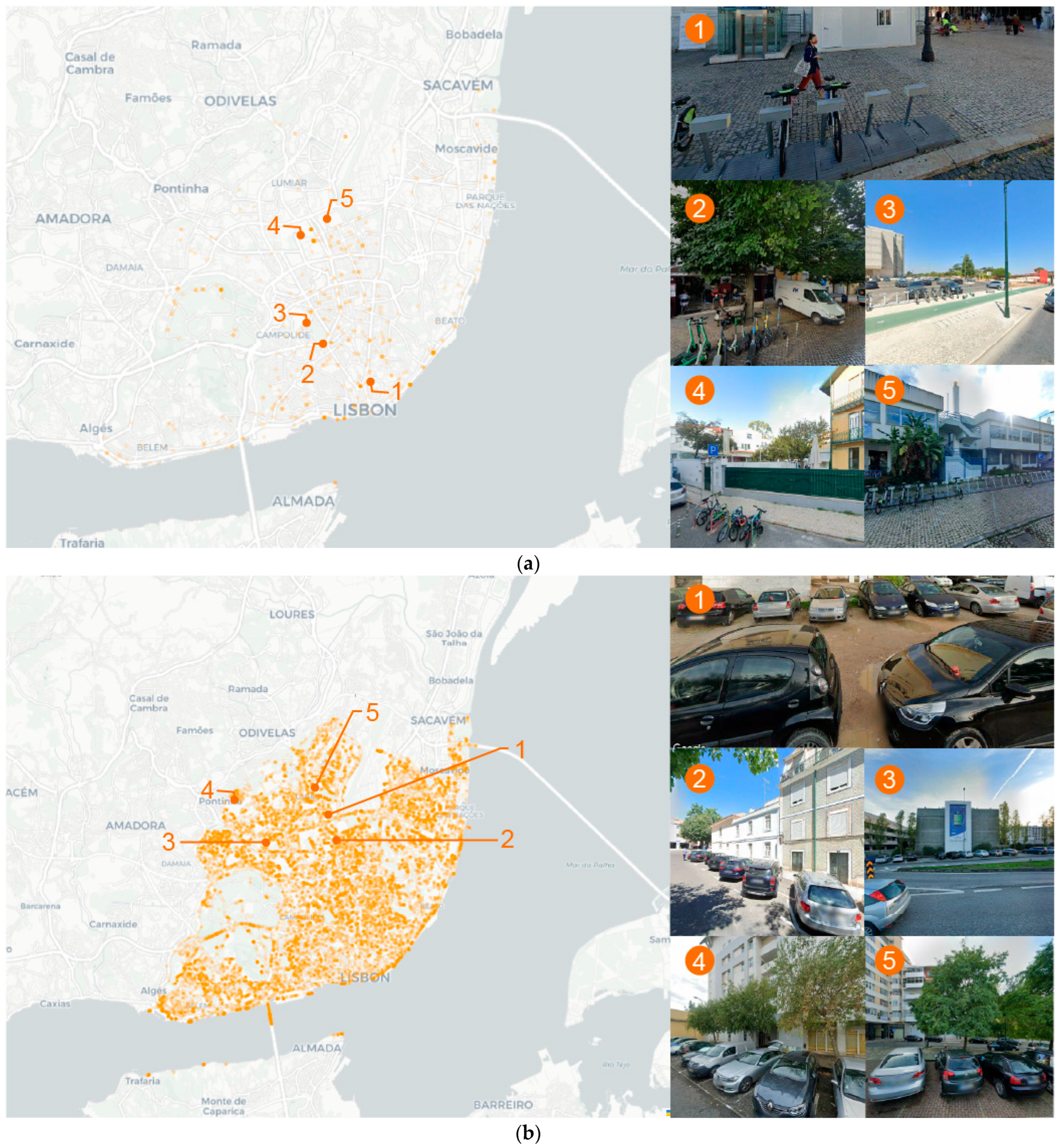
- Processing: This stage involved applying image semantic segmentation (NVIDIA Image Semantic Segmentation) and object detection (YOLOv5x6) techniques to identify and classify structures and objects within the images. This information was crucial for determining potential safety risks in the urban environment. Points where no objects were detected in any of the images from the four different angles were discarded. The list of segmented classes is in Appendix A. Additionally, a list of detected objects can be found in Appendix B.
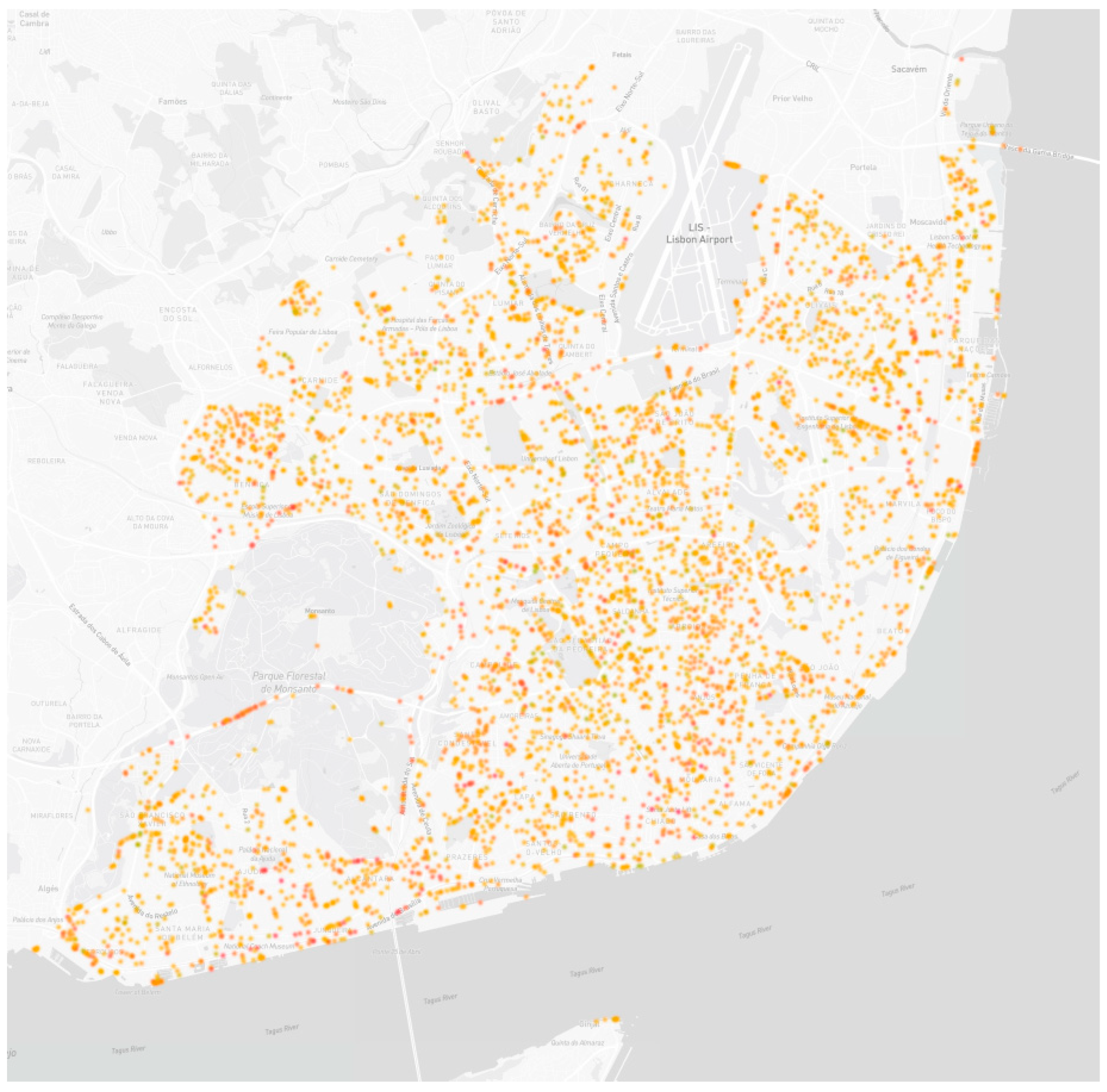
- Outputs: A safety map was created at this stage, which served as the basis for the safe route planner and was designed to help users easily understand the safety levels of different areas in the city. Additionally, a safe route generator was developed and made available for users. The generator avoids locations based on the user’s selected safety options when routing.
3.1. Safety Score
3.2. Routing
4. Case Study
4.1. Cycling Infrastructure Improvement
4.2. Safety Score Prediction
4.3. Router Factor
- A total of 100 pairs of random points are generated, each 5 km apart when measured in a straight line. The methodology for generating these pairs is described in detail in the subsequent sub-chapter;
- Routes are calculated for origin and destination pairs based on time and distance;
- Following this, the routing factor for each route is computed.
- s.t.
- TravelTime ≈ 15 min
- TotalDistance ≥ 5 km
- where k is the total routes (100 random routes), TravelTime is the duration of the route calculated by the router, and TotalDistance is the distance calculated by the router.
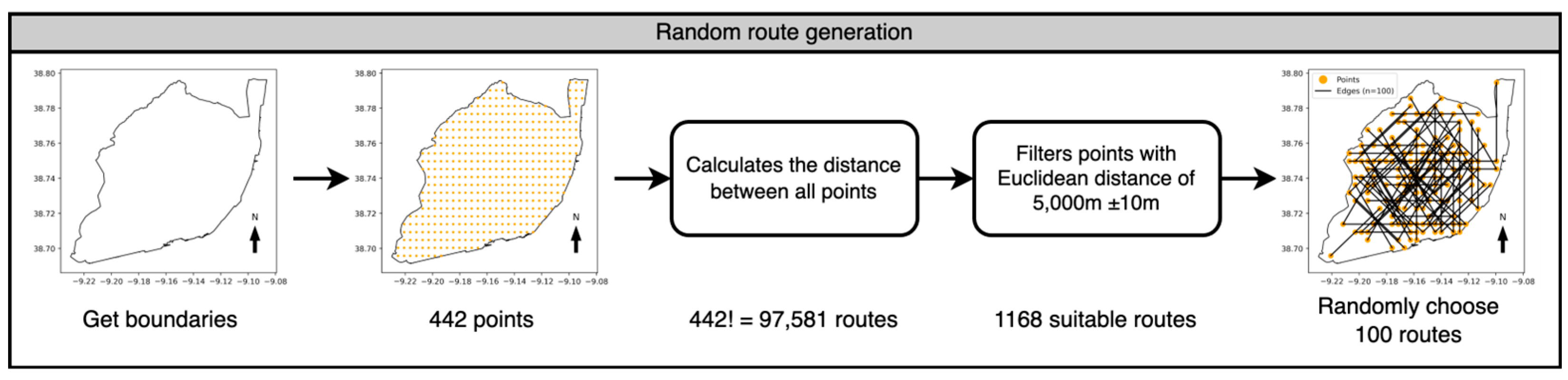
4.4. Random Route Generation
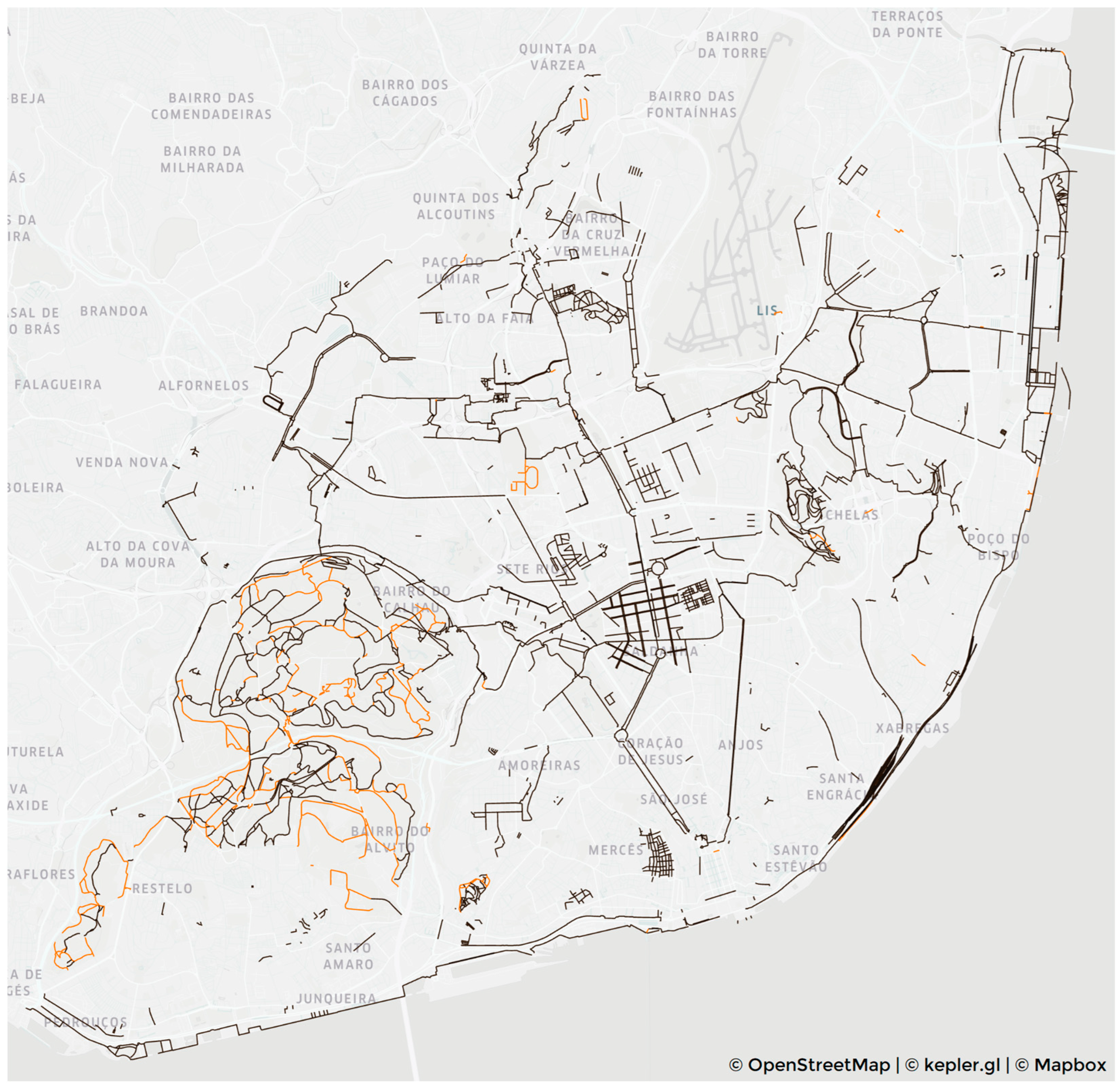
- Determine the study area: The initial step involves defining the boundaries of the study area, which is Lisbon, Portugal in this case.
- Create a grid of points: Using these boundaries, a grid is constructed consisting of points that are spaced every 500 m. The grid is confined within the previously established boundaries, resulting in a total of 442 points distributed throughout the study area.
- Calculate distances between all points: Subsequent to the grid’s creation, the distances between each point and every other point on the grid are calculated. Applying the mathematical concept of combinations, all unique pairings of points are determined, leading to a total of 97,581 routes.
- Filtering routes: Given the aim of generating routes with a specific distance, pairs of points where the Euclidean distance between them is approximately 5 km, with a tolerance of ±10 m, are filtered out. This step narrows down the number of suitable routes to 1168. Routes with routing errors have been excluded. Additionally, routes for which the safest path could not be computed due to an excessive number of risk points were excluded from the analysis.
- Randomly choose routes: Finally, 100 routes are randomly selected from the list of suitable ones. This random selection ensures a diverse set of routes distributed throughout the study area.
5. Results and Discussion
5.1. Safety Score Prediction
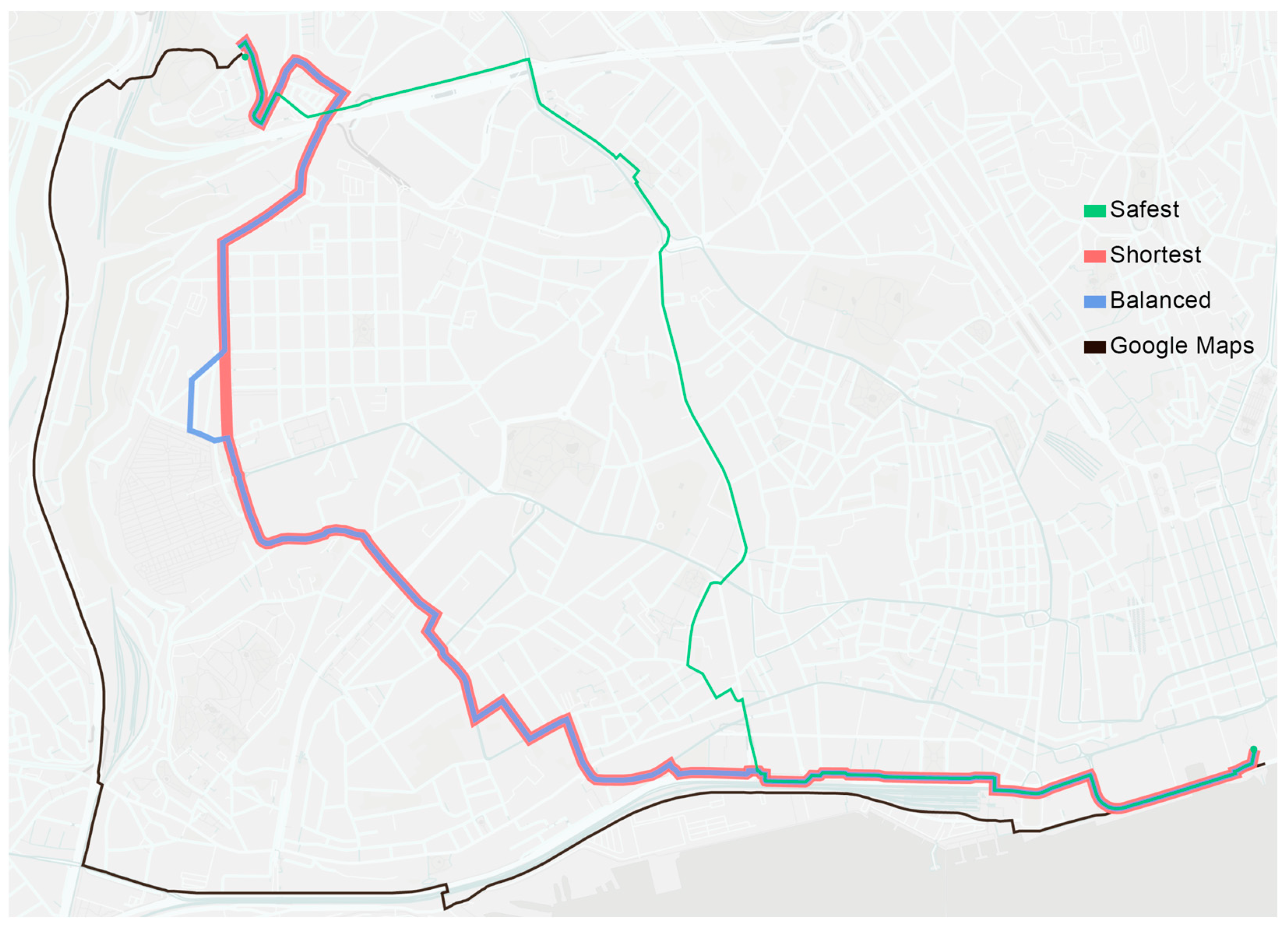
5.2. Route Planning and Comparative Analysis
5.3. Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. List of Segmented Classes
| 1. Bicycle | 24. Curb | 47. Rail Track |
| 2. Bicyclist | 25. Curb Cut | 48. Road |
| 3. Bike Lane | 26. Crosswalk—Plain | 49. Sand |
| 4. Bike Rack | 27. Ego Vehicle | 50. Service Lane |
| 5. Billboard | 28. Fence | 51. Sidewalk |
| 6. Bird | 29. Fire Hydrant | 52. Sky |
| 7. Boat | 30. Guard Rail | 53. Snow |
| 8. Boat Mount | 31. Junction Box | 54. Street Light |
| 9. Brid | 32. Lane Marking—Crosswalk | 55. Terrain |
| 10. Bridge | 33. Lane Marking—General | 56. Traffic Light |
| 11. Building | 34. Mailbox | 57. Traffic Sign (Back) |
| 12. Bus | 35. Manhole | 58. Traffic Sign (Front) |
| 13. Banner | 36. Mountain | 59. Traffic Sign Frame |
| 14. Barrier | 37. Motorcycle | 60. Trailer |
| 15. Bench | 38. Motorcyclist | 61. Trash Can |
| 16. Bicycle | 39. On Rails | 62. Truck |
| 17. Boat | 40. Other Rider | 63. Tunnel |
| 18. Bus | 41. Other Vehicle | 64. Unlabeled |
| 19. Car | 42. Parking | 65. Utility Pole |
| 20. Car Mount | 43. Pedestrian Area | 66. Vegetation |
| 21. Caravan | 44. Phone Booth | 67. Water |
| 22. Catch Basin | 45. Pole | 68. Wheeled Slow |
| 23. CCTV Camera | 46. Pothole |
Appendix B. List of Detected Objects
| 1. Airplane | 24. Donut | 47. Sink |
| 2. Apple | 25. Elephant | 48. Skateboard |
| 3. Backpack | 26. Fire Hydrant | 49. Skis |
| 4. Banana | 27. Frisbee | 50. Snowboard |
| 5. Baseball Bat | 28. Hair Drier | 51. Spoon |
| 6. Baseball Glove | 29. Handbag | 52. Sports Ball |
| 7. Bear | 30. Horse | 53. Stop Sign |
| 8. Bed | 31. Hot Dog | 54. Suitcase |
| 9. Bird | 32. Keyboard | 55. Surfboard |
| 10. Boat | 33. Kite | 56. Teddy Bear |
| 11. Book | 34. Knife | 57. Television |
| 12. Bottle | 35. Laptop | 58. Tennis Racket |
| 13. Bowl | 36. Microwave | 59. Toaster |
| 14. Broccoli | 37. Motorcycle | 60. Toilet |
| 15. Cell Phone | 38. Mouse | 61. Toothbrush |
| 16. Chair | 39. Oven | 62. Tie |
| 17. Cat | 40. Parking Meter | 63. Toilet |
| 18. Clock | 41. Person | 64. Traffic Light |
| 19. Couch | 42. Potted Plant | 65. Train |
| 20. Cow | 43. Remote | 66. Truck |
| 21. Cup | 44. Sandwich | 67. Umbrella |
| 22. Dining Table | 45. Scissors | 68. Vase |
| 23. Dog | 46. Sheep | 69. Wine Glass |
References
- Bettencourt, L.M.A.; Lobo, J.; Helbing, D.; Kühnert, C.; West, G.B. Growth, Innovation, Scaling, and the Pace of Life in Cities. Proc. Natl. Acad. Sci. USA 2007, 104, 7301–7306. [Google Scholar] [CrossRef]
- Batty, M. The Size, Scale, and Shape of Cities. Science 2008, 319, 769–771. [Google Scholar] [CrossRef]
- Diao, M.; Kong, H.; Zhao, J. Impacts of Transportation Network Companies on Urban Mobility. Nat. Sustain. 2021, 4, 494–500. [Google Scholar] [CrossRef]
- Zuo, T.; Wei, H.; Chen, N.; Zhang, C. First-and-Last Mile Solution via Bicycling to Improving Transit Accessibility and Advancing Transportation Equity. Cities 2020, 99, 102614. [Google Scholar] [CrossRef]
- Zuo, T.; Wei, H.; Chen, N. Promote Transit via Hardening First-and-Last-Mile Accessibility: Learned from Modeling Commuters’ Transit Use. Transp. Res. Part D Transp. Environ. 2020, 86, 102446. [Google Scholar] [CrossRef]
- Amiril, A.; Nawawi, A.H.; Takim, R.; Latif, S.N.F.A. Transportation Infrastructure Project Sustainability Factors and Performance. Procedia Soc. Behav. Sci. 2014, 153, 90–98. [Google Scholar] [CrossRef]
- Martens, K. The Bicycle as a Feedering Mode: Experiences from Three European Countries. Transp. Res. Part D Transp. Environ. 2004, 9, 281–294. [Google Scholar] [CrossRef]
- Sun, J.; Chow, A.C.H.; Michel Madanat, S. Tradeoffs between Optimality and Equity in Transportation Network Protection against Sea Level Rise. Transp. Res. Part A Policy Pract. 2022, 163, 195–208. [Google Scholar] [CrossRef]
- Bills, T.S.; Walker, J.L. Looking beyond the Mean for Equity Analysis: Examining Distributional Impacts of Transportation Improvements. Transp. Policy 2017, 54, 61–69. [Google Scholar] [CrossRef]
- Zhang, Y.; Mi, Z. Environmental Benefits of Bike Sharing: A Big Data-Based Analysis. Appl. Energy 2018, 220, 296–301. [Google Scholar] [CrossRef]
- Caulfield, B.; O’Mahony, M.; Brazil, W.; Weldon, P. Examining Usage Patterns of a Bike-Sharing Scheme in a Medium Sized City. Transp. Res. Part A Policy Pract. 2017, 100, 152–161. [Google Scholar] [CrossRef]
- Cervero, R.; Sarmiento, O.L.; Jacoby, E.; Gomez, L.F.; Neiman, A. Influences of Built Environments on Walking and Cycling: Lessons from Bogotá. Int. J. Sustain. Transp. 2009, 3, 203–226. [Google Scholar] [CrossRef]
- Heinen, E.; van Wee, B.; Maat, K. Commuting by Bicycle: An Overview of the Literature. Transp. Rev. 2010, 30, 59–96. [Google Scholar] [CrossRef]
- Ewing, R.; Handy, S. Measuring the Unmeasurable: Urban Design Qualities Related to Walkability. J. Urban Des. 2009, 14, 65–84. [Google Scholar] [CrossRef]
- Pérez, K.; Olabarria, M.; Rojas-Rueda, D.; Santamariña-Rubio, E.; Borrell, C.; Nieuwenhuijsen, M. The Health and Economic Benefits of Active Transport Policies in Barcelona. J. Transp. Health 2017, 4, 316–324. [Google Scholar] [CrossRef]
- Sallis, J.F.; Frank, L.D.; Saelens, B.E.; Kraft, M.K. Active Transportation and Physical Activity: Opportunities for Collaboration on Transportation and Public Health Research. Transp. Res. Part A Policy Pract. 2004, 38, 249–268. [Google Scholar] [CrossRef]
- Kaltenbrunner, A.; Meza, R.; Grivolla, J.; Codina, J.; Banchs, R. Urban Cycles and Mobility Patterns: Exploring and Predicting Trends in a Bicycle-Based Public Transport System. Pervasive Mob. Comput. 2010, 6, 455–466. [Google Scholar] [CrossRef]
- Félix, R.; Moura, F.; Clifton, K.J. Maturing Urban Cycling: Comparing Barriers and Motivators to Bicycle of Cyclists and Non-Cyclists in Lisbon, Portugal. J. Transp. Health 2019, 15, 100628. [Google Scholar] [CrossRef]
- Lindsay, G.; Macmillan, A.; Woodward, A. Moving Urban Trips from Cars to Bicycles: Impact on Health and Emissions. Aust. N. Z. J. Public Health 2011, 35, 54–60. [Google Scholar] [CrossRef]
- De Hartog, J.J.; Boogaard, H.; Nijland, H.; Hoek, G. Do the Health Benefits of Cycling Outweigh the Risks? Environ. Health Perspect. 2010, 118, 1109–1116. [Google Scholar] [CrossRef]
- Rojas-Rueda, D.; de Nazelle, A.; Teixidó, O.; Nieuwenhuijsen, M.J. Replacing Car Trips by Increasing Bike and Public Transport in the Greater Barcelona Metropolitan Area: A Health Impact Assessment Study. Environ. Int. 2012, 49, 100–109. [Google Scholar] [CrossRef] [PubMed]
- Pucher, J.; Buehler, R. Cycling towards a More Sustainable Transport Future. Transp. Rev. 2017, 37, 689–694. [Google Scholar] [CrossRef]
- Yuan, Z.; Zhou, X.; Yang, T. Hetero-ConvLSTM. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; ACM: New York, NY, USA, 2018; pp. 984–992. [Google Scholar]
- Jabbar, R.; Al-Khalifa, K.; Kharbeche, M.; Alhajyaseen, W.; Jafari, M.; Jiang, S. Real-Time Driver Drowsiness Detection for Android Application Using Deep Neural Networks Techniques. Procedia Comput. Sci. 2018, 130, 400–407. [Google Scholar] [CrossRef]
- Tran, D.; Manh Do, H.; Sheng, W.; Bai, H.; Chowdhary, G. Real-time Detection of Distracted Driving Based on Deep Learning. IET Intell. Transp. Syst. 2018, 12, 1210–1219. [Google Scholar] [CrossRef]
- Fayyaz, M.A.B.; Johnson, C. Object Detection at Level Crossing Using Deep Learning. Micromachines 2020, 11, 1055. [Google Scholar] [CrossRef]
- Formosa, N.; Quddus, M.; Ison, S.; Abdel-Aty, M.; Yuan, J. Predicting Real-Time Traffic Conflicts Using Deep Learning. Accid. Anal. Prev. 2020, 136, 105429. [Google Scholar] [CrossRef]
- Tamagusko, T.; Gomes Correia, M.; Huynh, M.A.; Ferreira, A. Deep Learning Applied to Road Accident Detection with Transfer Learning and Synthetic Images. Transp. Res. Procedia 2022, 64, 90–97. [Google Scholar] [CrossRef]
- Oeschger, G.; Carroll, P.; Caulfield, B. Micromobility and Public Transport Integration: The Current State of Knowledge. Transp. Res. Part D Transp. Environ. 2020, 89, 102628. [Google Scholar] [CrossRef]
- Şengül, B.; Mostofi, H. Impacts of E-Micromobility on the Sustainability of Urban Transportation—A Systematic Review. Appl. Sci. 2021, 11, 5851. [Google Scholar] [CrossRef]
- Tice, P.C. Micromobility and the Built Environment. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 929–932. [Google Scholar] [CrossRef]
- McQueen, M.; Abou-Zeid, G.; MacArthur, J.; Clifton, K. Transportation Transformation: Is Micromobility Making a Macro Impact on Sustainability? J. Plan. Lit. 2021, 36, 46–61. [Google Scholar] [CrossRef]
- Hasselwander, M.; Tamagusko, T.; Bigotte, J.F.; Ferreira, A.; Mejia, A.; Ferranti, E.J.S. Building Back Better: The COVID-19 Pandemic and Transport Policy Implications for a Developing Megacity. Sustain. Cities Soc. 2021, 69, 102864. [Google Scholar] [CrossRef] [PubMed]
- Tamagusko, T.; Ferreira, A. Data-Driven Approach to Understand the Mobility Patterns of the Portuguese Population during the COVID-19 Pandemic. Sustainability 2020, 12, 9775. [Google Scholar] [CrossRef]
- Bikeable. CycleAI Bikeable Neural Network. Available online: https://cycleai.net/bikeable/ (accessed on 12 August 2023).
- Rita, L.; Peliteiro, M.; Bostan, T.-C.; Tamagusko, T.; Ferreira, A. Using Deep Learning and Google Street View Imagery to Assess and Improve Cyclist Safety in London. Sustainability 2023, 15, 10270. [Google Scholar] [CrossRef]
- Krylov, V.; Kenny, E.; Dahyot, R. Automatic Discovery and Geotagging of Objects from Street View Imagery. Remote Sens. 2018, 10, 661. [Google Scholar] [CrossRef]
- Campbell, A.; Both, A.; Sun, Q.C. Detecting and Mapping Traffic Signs from Google Street View Images Using Deep Learning and GIS. Comput. Environ. Urban Syst. 2019, 77, 101350. [Google Scholar] [CrossRef]
- Sukel, M.; Rudinac, S.; Worring, M. Urban Object Detection Kit: A System for Collection and Analysis of Street-Level Imagery. In Proceedings of the 2020 International Conference on Multimedia Retrieval, Dublin, Ireland, 8–11 June 2020; ACM: New York, NY, USA, 2020; pp. 509–516. [Google Scholar]
- Goel, R.; Garcia, L.M.T.; Goodman, A.; Johnson, R.; Aldred, R.; Murugesan, M.; Brage, S.; Bhalla, K.; Woodcock, J. Estimating City-Level Travel Patterns Using Street Imagery: A Case Study of Using Google Street View in Britain. PLoS ONE 2018, 13, e0196521. [Google Scholar] [CrossRef]
- Ito, K.; Biljecki, F. Assessing Bikeability with Street View Imagery and Computer Vision. Transp. Res. Part C Emerg. Technol. 2021, 132, 103371. [Google Scholar] [CrossRef]
- Kellstedt, D.K.; Spengler, J.O.; Foster, M.; Lee, C.; Maddock, J.E. A Scoping Review of Bikeability Assessment Methods. J. Community Health 2021, 46, 211–224. [Google Scholar] [CrossRef]
- Gu, P.; Han, Z.; Cao, Z.; Chen, Y.; Jiang, Y. Using Open Source Data to Measure Street Walkability and Bikeability in China: A Case of Four Cities. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 63–75. [Google Scholar] [CrossRef]
- Ding, X.; Fan, H.; Gong, J. Towards Generating Network of Bikeways from Mapillary Data. Comput. Environ. Urban Syst. 2021, 88, 101632. [Google Scholar] [CrossRef]
- Li, X.; Flohr, F.; Yang, Y.; Xiong, H.; Braun, M.; Pan, S.; Li, K.; Gavrila, D.M. A New Benchmark for Vision-Based Cyclist Detection. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; IEEE: New York, NY, USA, 2016; pp. 1028–1033. [Google Scholar]
- Rajeshwari, P.; Abhishek, P.; Srikanth, P.; Vinod, T. Object Detection: An Overview. Int. J. Trend Sci. Res. Dev. 2019, 3, 1663–1665. [Google Scholar] [CrossRef]
- Xiao, J.; Quan, L. Multiple View Semantic Segmentation for Street View Images. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; IEEE: New York, NY, USA, 2009; pp. 686–693. [Google Scholar]
- Chacra, D.A.; Zelek, J. Road Segmentation in Street View Images Using Texture Information. In Proceedings of the 2016 13th Conference on Computer and Robot Vision (CRV), Victoria, BC, Canada, 1–3 June 2016; IEEE: New York, NY, USA, 2016; pp. 424–431. [Google Scholar]
- Minaee, S.; Boykov, Y.Y.; Porikli, F.; Plaza, A.J.; Kehtarnavaz, N.; Terzopoulos, D. Image Segmentation Using Deep Learning: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3523–3542. [Google Scholar] [CrossRef]
- Cavoli, C. Accelerating Sustainable Mobility and Land-Use Transitions in Rapidly Growing Cities: Identifying Common Patterns and Enabling Factors. J. Transp. Geogr. 2021, 94, 103093. [Google Scholar] [CrossRef]
- Makarova, I.; Pashkevich, A.; Shubenkova, K.; Mukhametdinov, E. Ways to Increase Population Mobility through the Transition to Sustainable Transport. Procedia Eng. 2017, 187, 756–762. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of Micro-Mobility: Analysis of E-Scooter Crashes by Mining News Reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef]
- Latinopoulos, C.; Patrier, A.; Sivakumar, A. Planning for E-Scooter Use in Metropolitan Cities: A Case Study for Paris. Transp. Res. Part D Transp. Environ. 2021, 100, 103037. [Google Scholar] [CrossRef]
- Davies, N.; Blazejewski, L.; Sherriff, G. The Rise of Micromobilities at Tourism Destinations. J. Tour. Futur. 2020, 6, 209–212. [Google Scholar] [CrossRef]
- World Health Organization. World Health Organization Cyclist Safety: An Information Resource for Decision-Makers and Practitioners; World Health Organization: Geneva, Switzerland, 2020.
- Prencipe, L.P.; Colovic, A.; De Bartolomeo, S.; Caggiani, L.; Ottomanelli, M. An Efficiency Indicator for Micromobility Safety Assessment. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June–1 July 2022; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]
- Haworth, N.; Schramm, A.; Twisk, D. Comparing the Risky Behaviours of Shared and Private E-Scooter and Bicycle Riders in Downtown Brisbane, Australia. Accid. Anal. Prev. 2021, 152, 105981. [Google Scholar] [CrossRef]
- O’Hern, S.; Estgfaeller, N. A Scientometric Review of Powered Micromobility. Sustainability 2020, 12, 9505. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018.
- Folco, P.; Gauvin, L.; Tizzoni, M.; Szell, M. Data-Driven Micromobility Network Planning for Demand and Safety. Environ. Plan. B Urban Anal. City Sci. 2022, 239980832211356. [Google Scholar] [CrossRef]
- Gomes Correia, M.; Bonates, T.D.O.E.; Prata, B.D.A.; Nobre Júnior, E.F. An Integer Linear Programming Approach for Pavement Maintenance and Rehabilitation Optimization. Int. J. Pavement Eng. 2022, 23, 2710–2727. [Google Scholar] [CrossRef]
- Karpinski, E.; Bayles, E.; Sanders, T. Safety Analysis for Micromobility: Recommendations on Risk Metrics and Data Collection. Transp. Res. Rec. J. Transp. Res. Board 2022, 2676, 420–435. [Google Scholar] [CrossRef]
- Tao, A.; Sapra, K.; Catanzaro, B. Hierarchical Multi-Scale Attention for Semantic Segmentation. arXiv 2020, arXiv:2005.10821. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2015, arXiv:1506.02640. [Google Scholar] [CrossRef]
- Ultralytics YOLOv5. Available online: https://github.com/ultralytics/yolov5 (accessed on 3 February 2023).
- Tamagusko, T.; Ferreira, A. Optimizing Pothole Detection in Pavements: A Comparative Analysis of Deep Learning Models. Eng. Proc. 2023, 36, 11. [Google Scholar]
- Neis, P.; Zipf, A. Zur Kopplung von OpenSource, OpenLS und OpenStreetMaps in OpenRouteService.Org. Available online: https://www.geog.uni-heidelberg.de/md/chemgeo/geog/gis/agit2008.openrouteservice.fullpaper.pdf (accessed on 12 July 2023).
- Instituto Nacional de Estatística Censos 2021. O Que nos Dizem os Censos Sobre Dinâmicas Territoriais. Available online: https://www.ine.pt/xurl/pub/66320870p (accessed on 12 July 2023).
- Câmara Municipal de Lisboa Câmara de Lisboa. Available online: https://www.lisboa.pt/municipio/freguesias (accessed on 21 April 2023).
- Moreno, C.; Allam, Z.; Chabaud, D.; Gall, C.; Pratlong, F. Introducing the “15-Minute City”: Sustainability, Resilience and Place Identity in Future Post-Pandemic Cities. Smart Cities 2021, 4, 93–111. [Google Scholar] [CrossRef]
- Allam, Z.; Bibri, S.E.; Chabaud, D.; Moreno, C. The ‘15-Minute City’ Concept Can Shape a Net-Zero Urban Future. Humanit. Soc. Sci. Commun. 2022, 9, 126. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
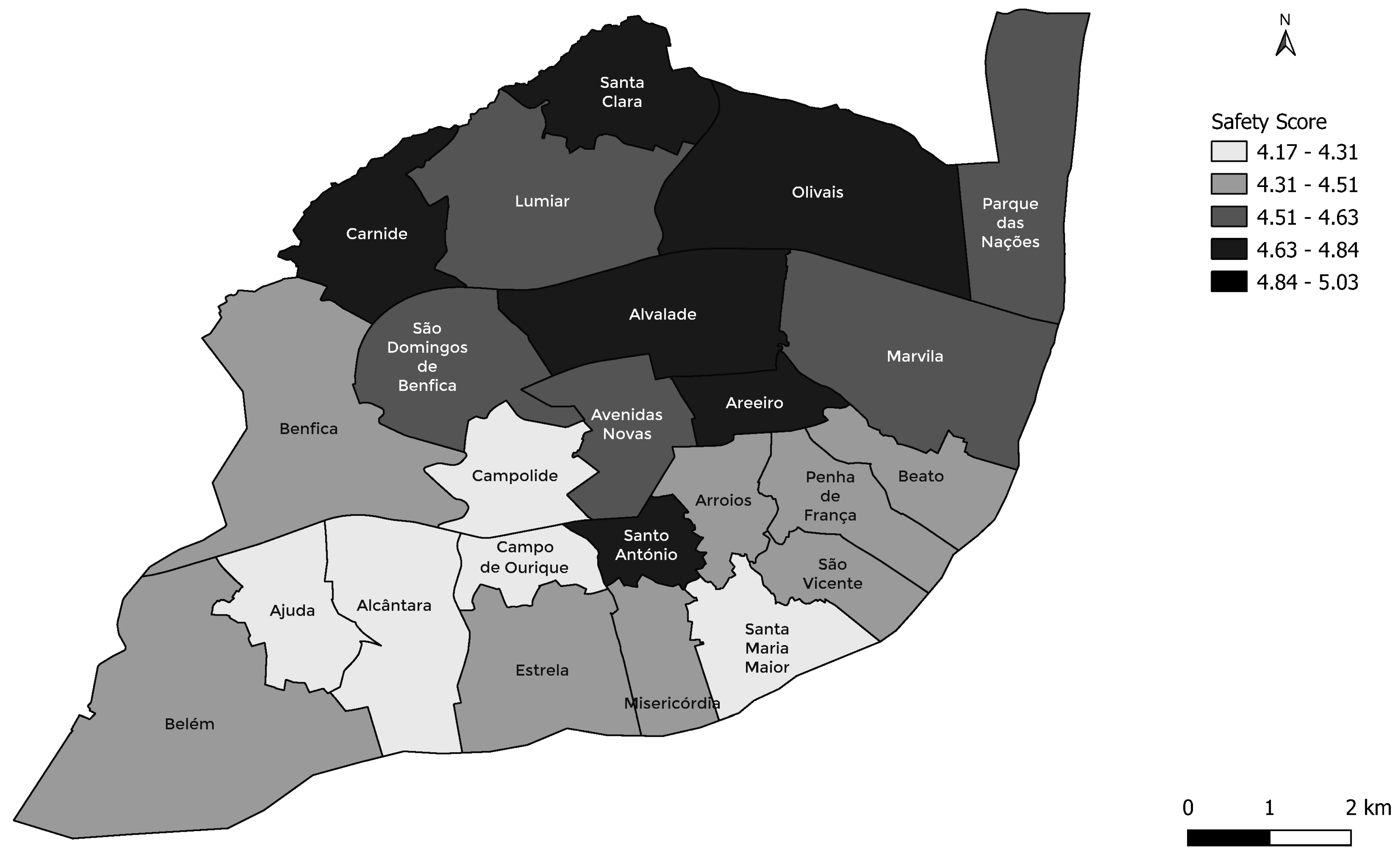
| Parish | Area (km2) | Number of Points | Points/km2 | Safety Score |
|---|---|---|---|---|
| Ajuda | 2.88 | 114 | 40 | 4.3 |
| Alcântara | 5.07 | 170 | 34 | 4.2 |
| Alvalade | 5.34 | 397 | 74 | 4.7 |
| Areeiro | 1.72 | 155 | 90 | 4.7 |
| Arroios | 2.13 | 277 | 130 | 4.5 |
| Avenidas Novas | 2.99 | 296 | 99 | 4.6 |
| Beato | 2.48 | 84 | 34 | 4.5 |
| Belém | 10.43 | 350 | 34 | 4.5 |
| Benfica | 8.02 | 294 | 37 | 4.4 |
| Campo de Ourique | 1.65 | 125 | 76 | 4.3 |
| Campolide | 2.77 | 143 | 52 | 4.3 |
| Carnide | 3.69 | 168 | 46 | 4.8 |
| Estrela | 4.60 | 194 | 42 | 4.5 |
| Lumiar | 6.57 | 385 | 59 | 4.6 |
| Marvila | 7.12 | 359 | 50 | 4.6 |
| Misericórdia | 2.19 | 66 | 30 | 4.4 |
| Olivais | 8.09 | 405 | 50 | 4.7 |
| Parque das Nações | 5.43 | 240 | 44 | 4.6 |
| Penha de França | 2.71 | 168 | 62 | 4.5 |
| Santa Clara | 3.36 | 143 | 43 | 4.7 |
| Santa Maria Maior | 3.01 | 114 | 38 | 4.3 |
| Santo António | 1.49 | 134 | 90 | 4.7 |
| São Domingos de Benfica | 4.29 | 255 | 59 | 4.6 |
| São Vicente | 1.99 | 96 | 48 | 4.5 |
| Average | 216 | 60 | 4.5 |
| Variable | Benchmark | Shortest | Balanced | Safest |
|---|---|---|---|---|
| Time (min) | 25.25 ± 4.30 | 21.77 ± 2.58 | 21.94 ± 2.62 | 23.47 ± 3.10 |
| Distance (km) | 6.62 ± 1.04 | 6.29 ± 0.71 | 6.33 ± 0.71 | 6.70 ± 0.81 |
| Route factor | 1.54 ± 0.25 | 1.37 ± 0.16 | 1.38 ± 0.16 | 1.47 ± 0.19 |
| % change in time | - | −13.7% | −13.1% | −7.1% |
| % change in distance | - | −5.0% | −4.4% | 1.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamagusko, T.; Gomes Correia, M.; Rita, L.; Bostan, T.-C.; Peliteiro, M.; Martins, R.; Santos, L.; Ferreira, A. Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning. Smart Cities 2023, 6, 2035-2056. https://doi.org/10.3390/smartcities6040094
Tamagusko T, Gomes Correia M, Rita L, Bostan T-C, Peliteiro M, Martins R, Santos L, Ferreira A. Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning. Smart Cities. 2023; 6(4):2035-2056. https://doi.org/10.3390/smartcities6040094
Chicago/Turabian StyleTamagusko, Tiago, Matheus Gomes Correia, Luís Rita, Tudor-Codrin Bostan, Miguel Peliteiro, Rodrigo Martins, Luísa Santos, and Adelino Ferreira. 2023. "Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning" Smart Cities 6, no. 4: 2035-2056. https://doi.org/10.3390/smartcities6040094
APA StyleTamagusko, T., Gomes Correia, M., Rita, L., Bostan, T.-C., Peliteiro, M., Martins, R., Santos, L., & Ferreira, A. (2023). Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning. Smart Cities, 6(4), 2035-2056. https://doi.org/10.3390/smartcities6040094