
Electric Vehicle Integration into Road Transportation, Intelligent Transportation, and Electric Power Systems: An Abu Dhabi Case Study

 ,
,
Abstract
:1. Introduction
1.1. Motivation
1.2. Contribution
1.3. Paper Outline
2. Materials and Methods
2.1. Background Material
2.1.1. Requirements for Holistic Technical Feasibility Assessment of EVs
- Microscopic—Ability to differentiate between ICVs and EVs;
- Discrete-time—Ability to simulate the time dependent location and speed of each vehicle;
- Operations-oriented—Assumes the transportation network is fixed over the simulation duration;
- Deterministic—Provides repeatable results of the traffic behavior;
- Monitors state of charge.
2.1.2. Performance Measures
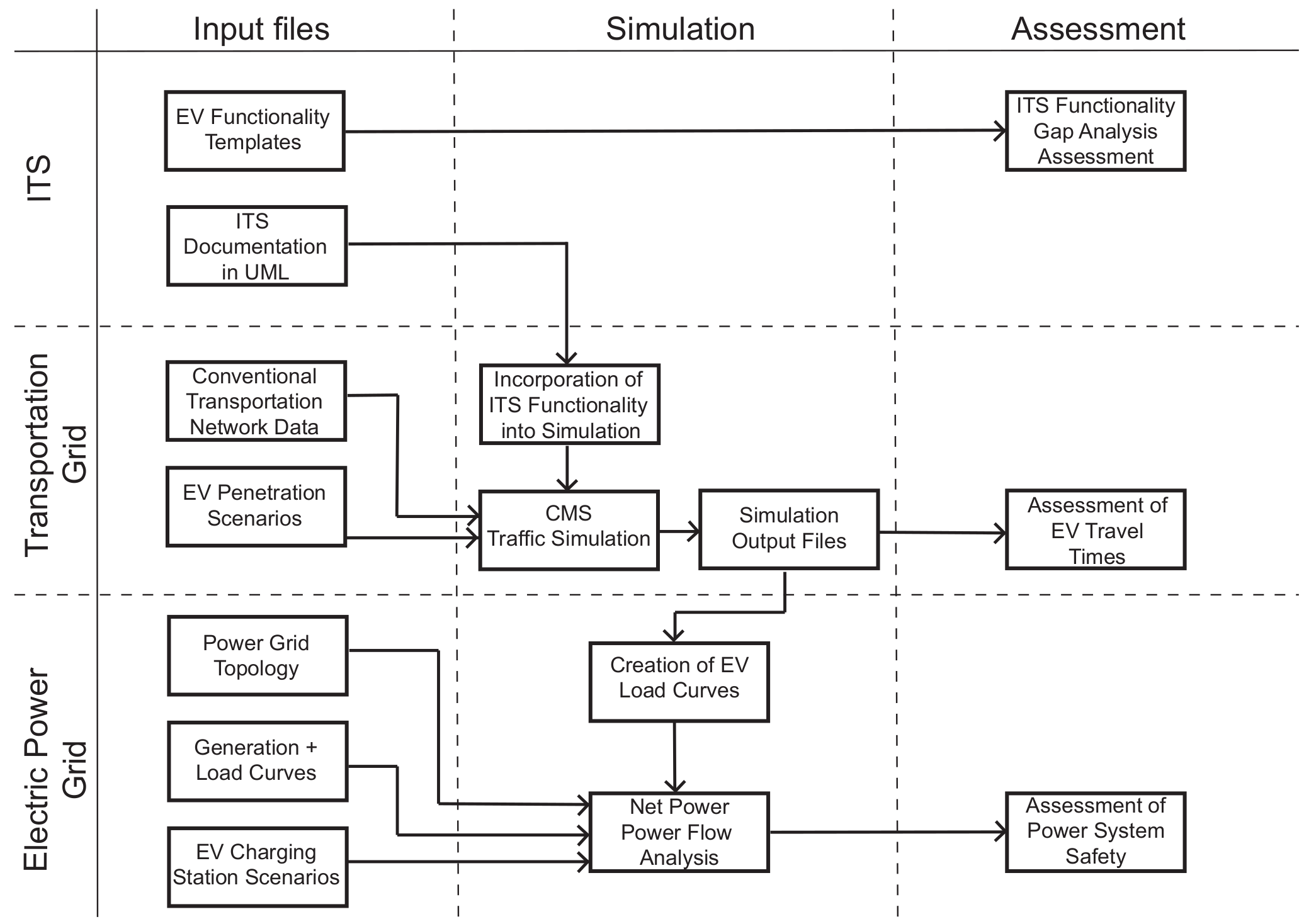
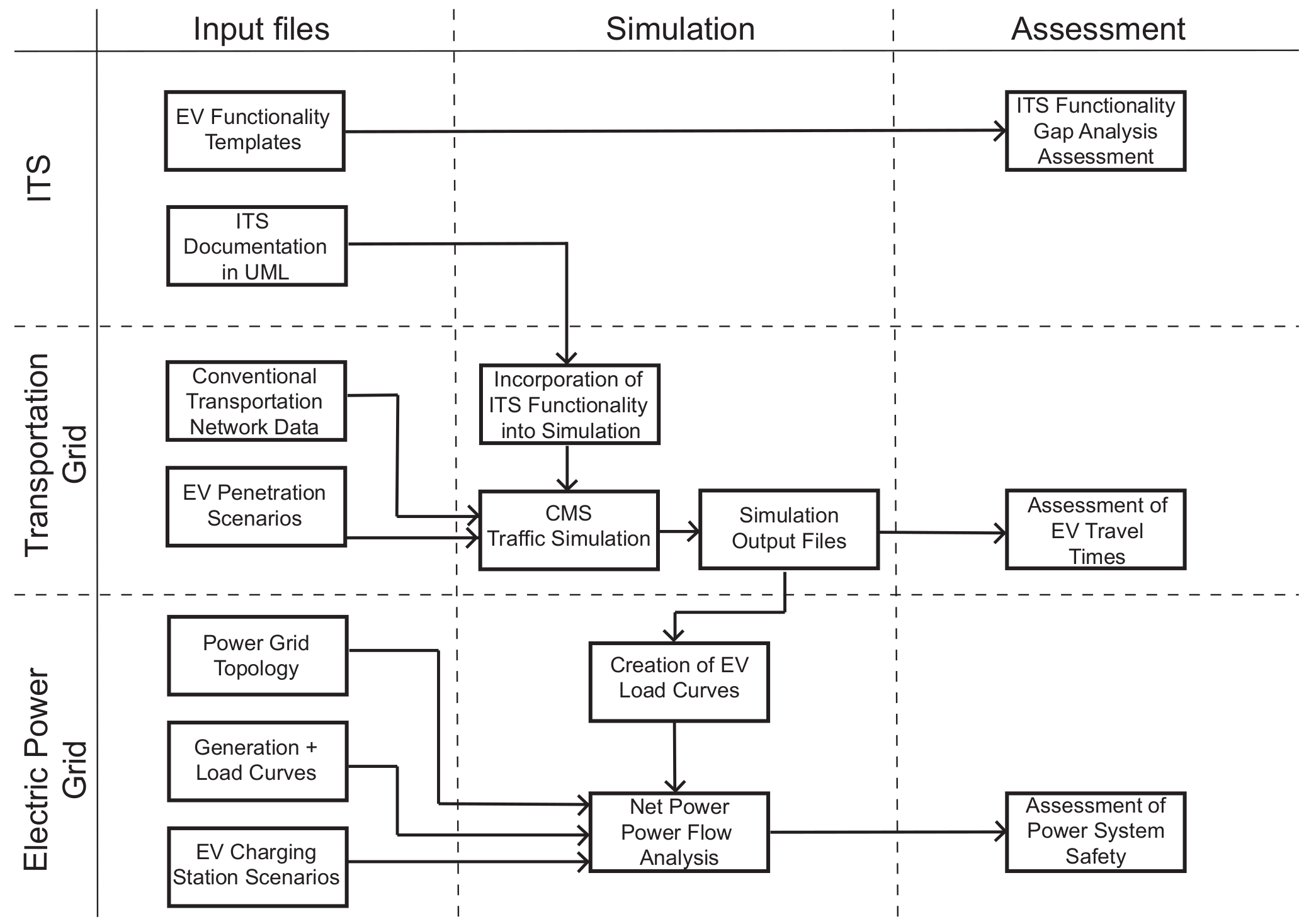
2.2. Assessment Method
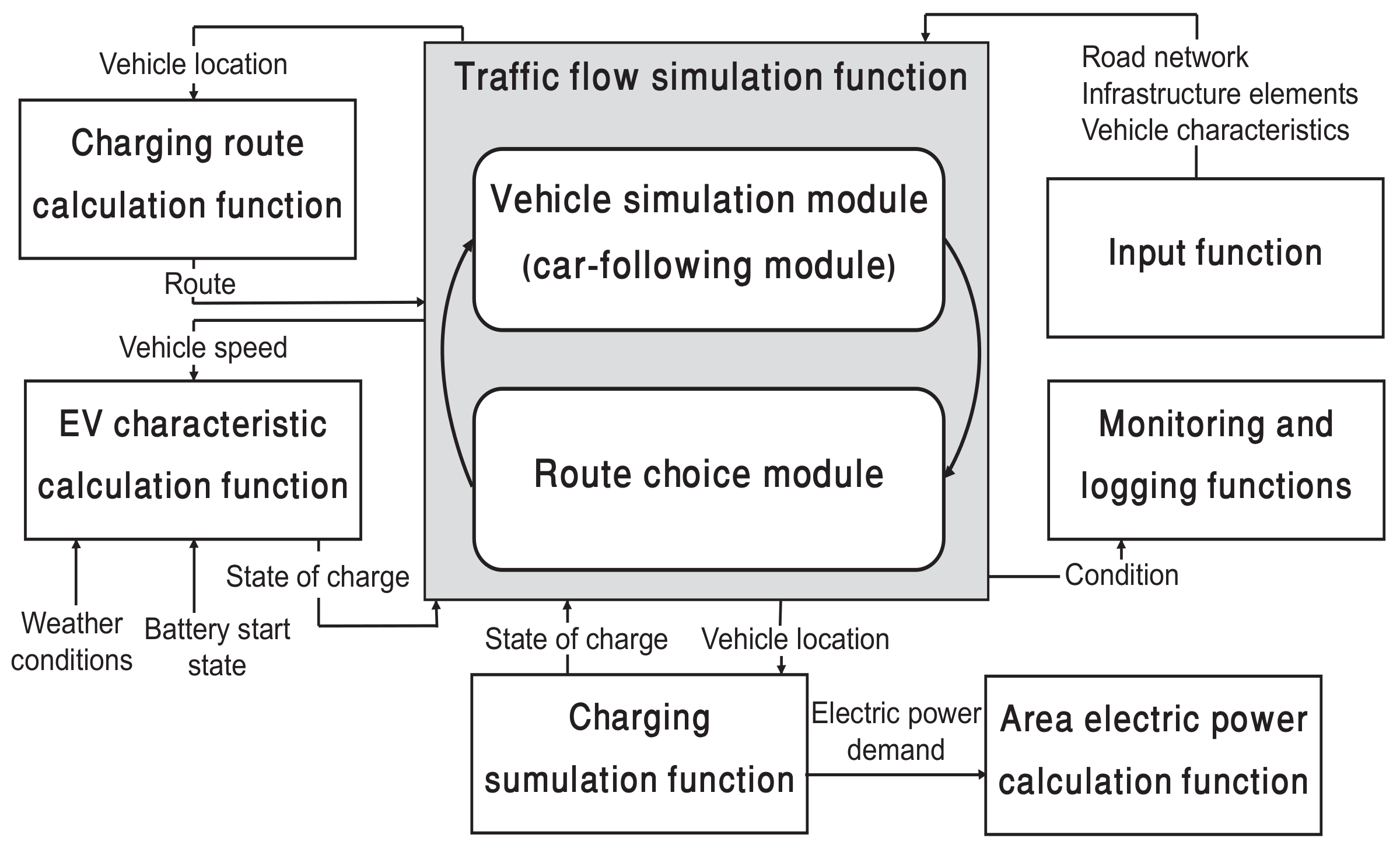
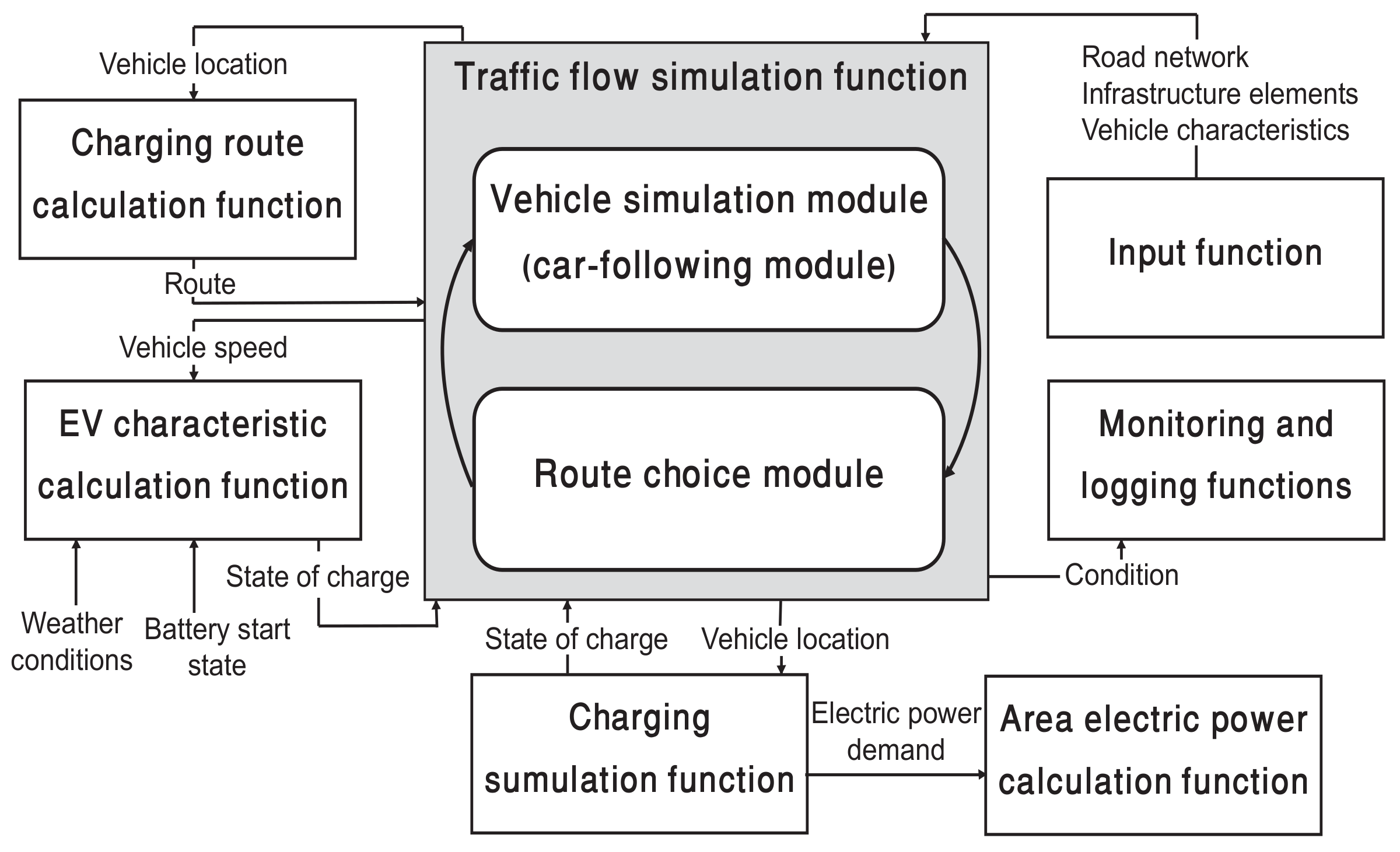
2.3. Clean Mobility Traffic Simulator
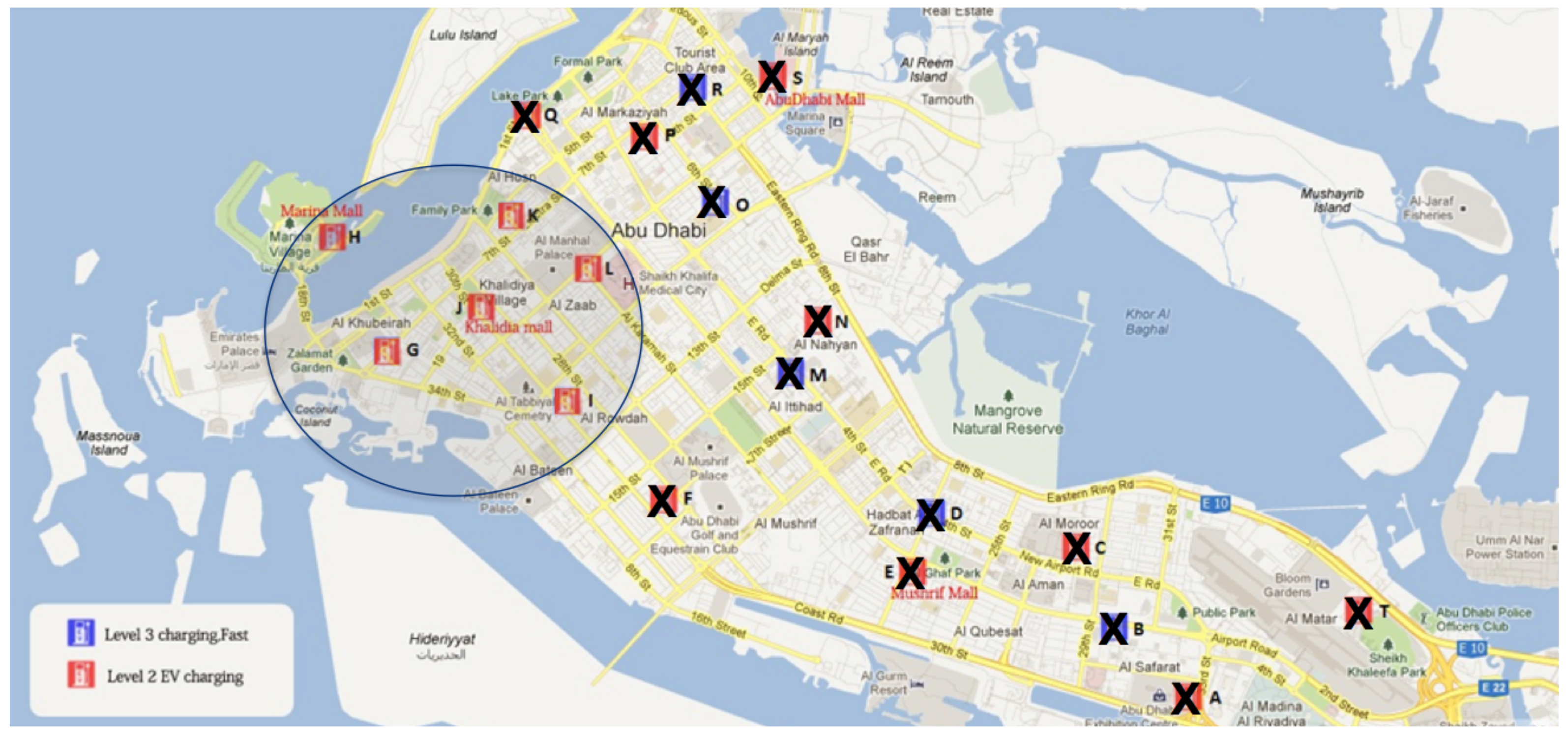
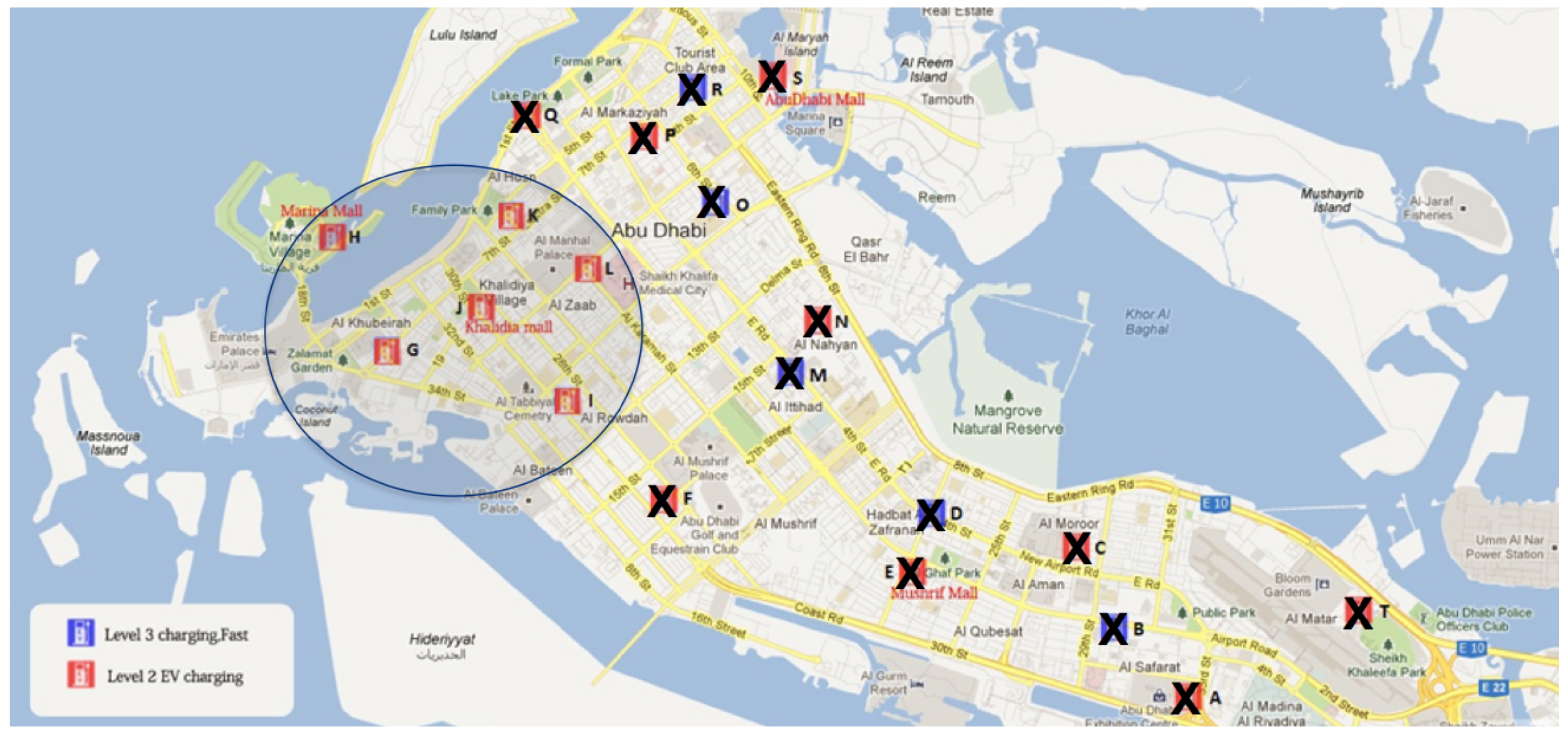
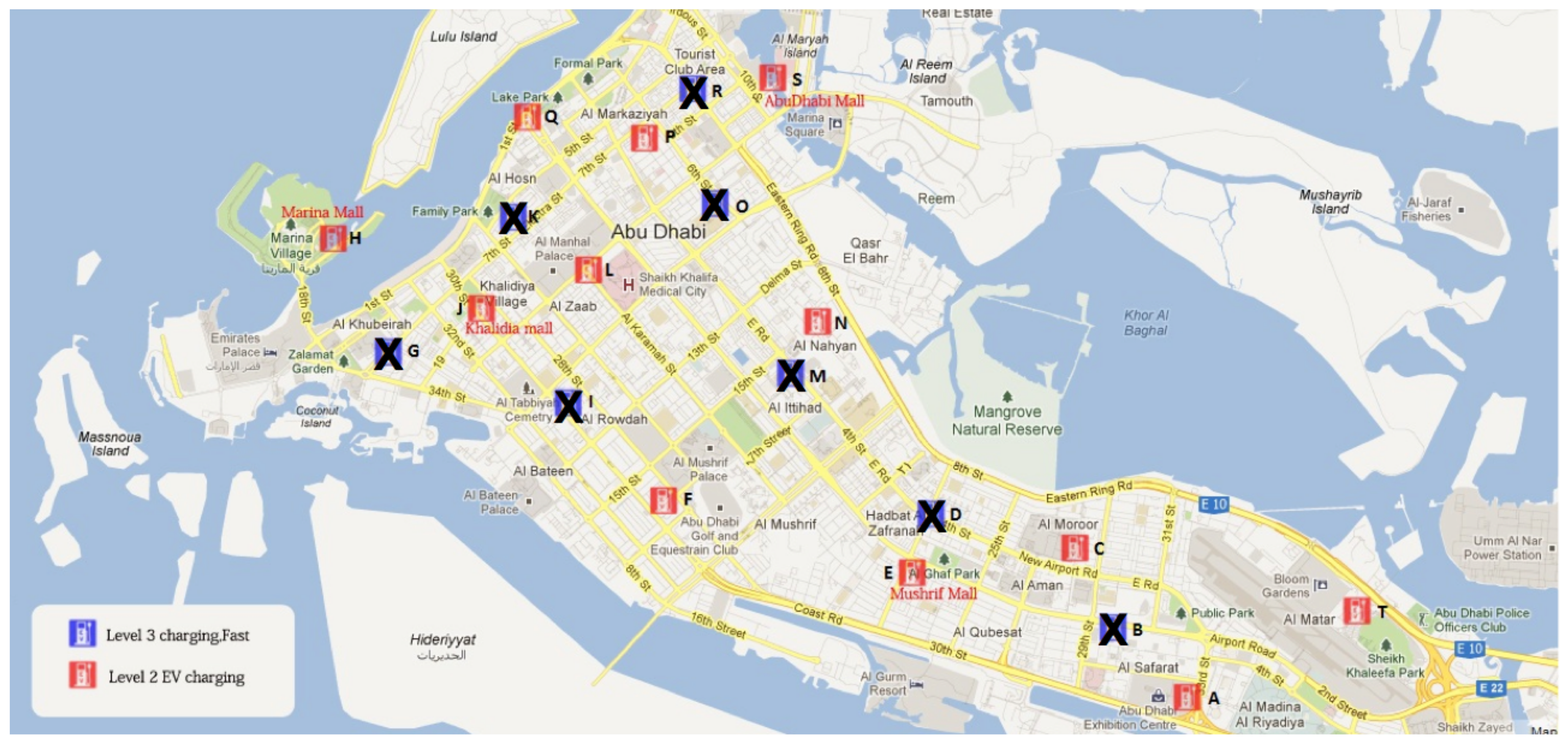
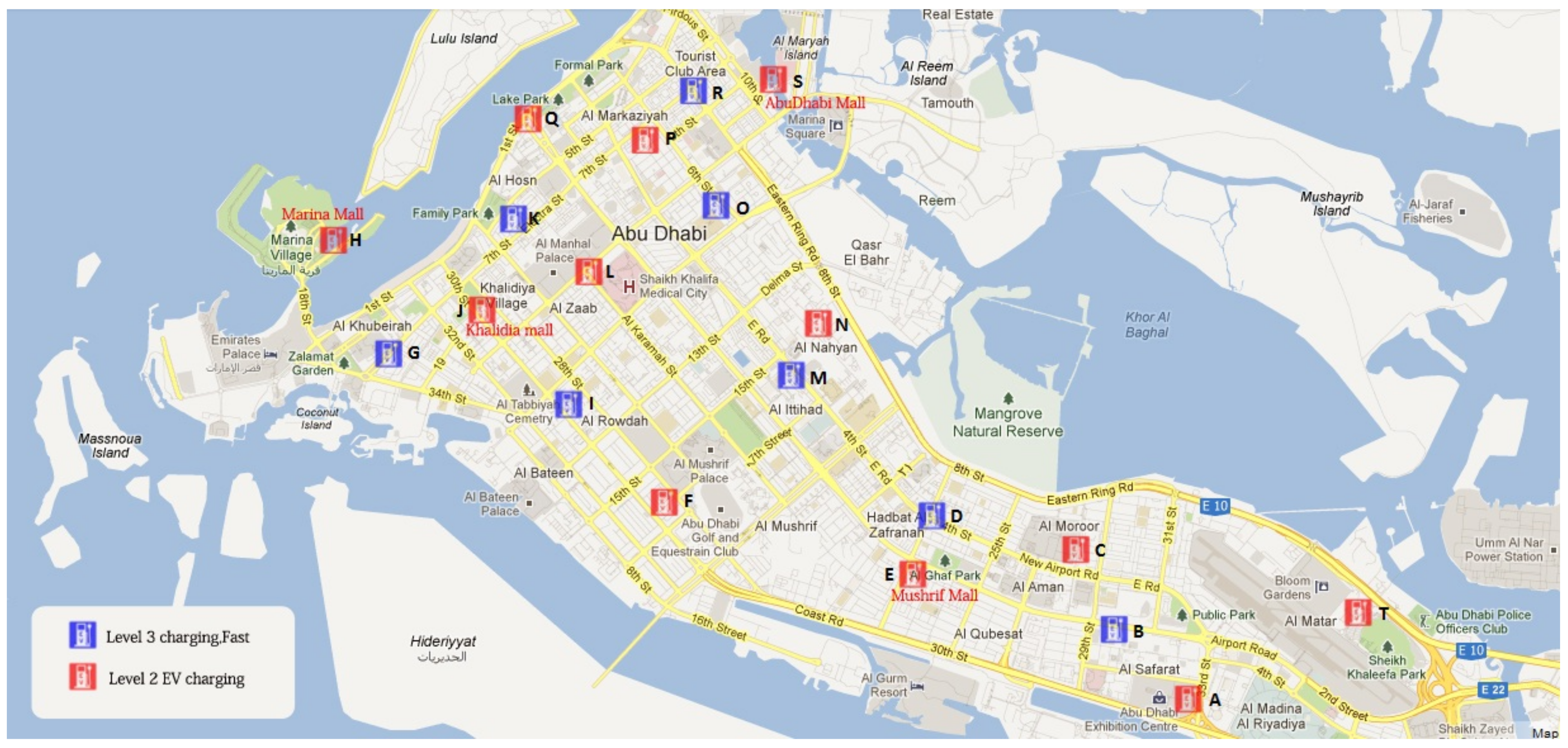
2.4. Abu Dhabi Base Traffic Simulation Setup
2.5. EV Penetration Use Case
2.6. Simulation Experimental Design
3. Results
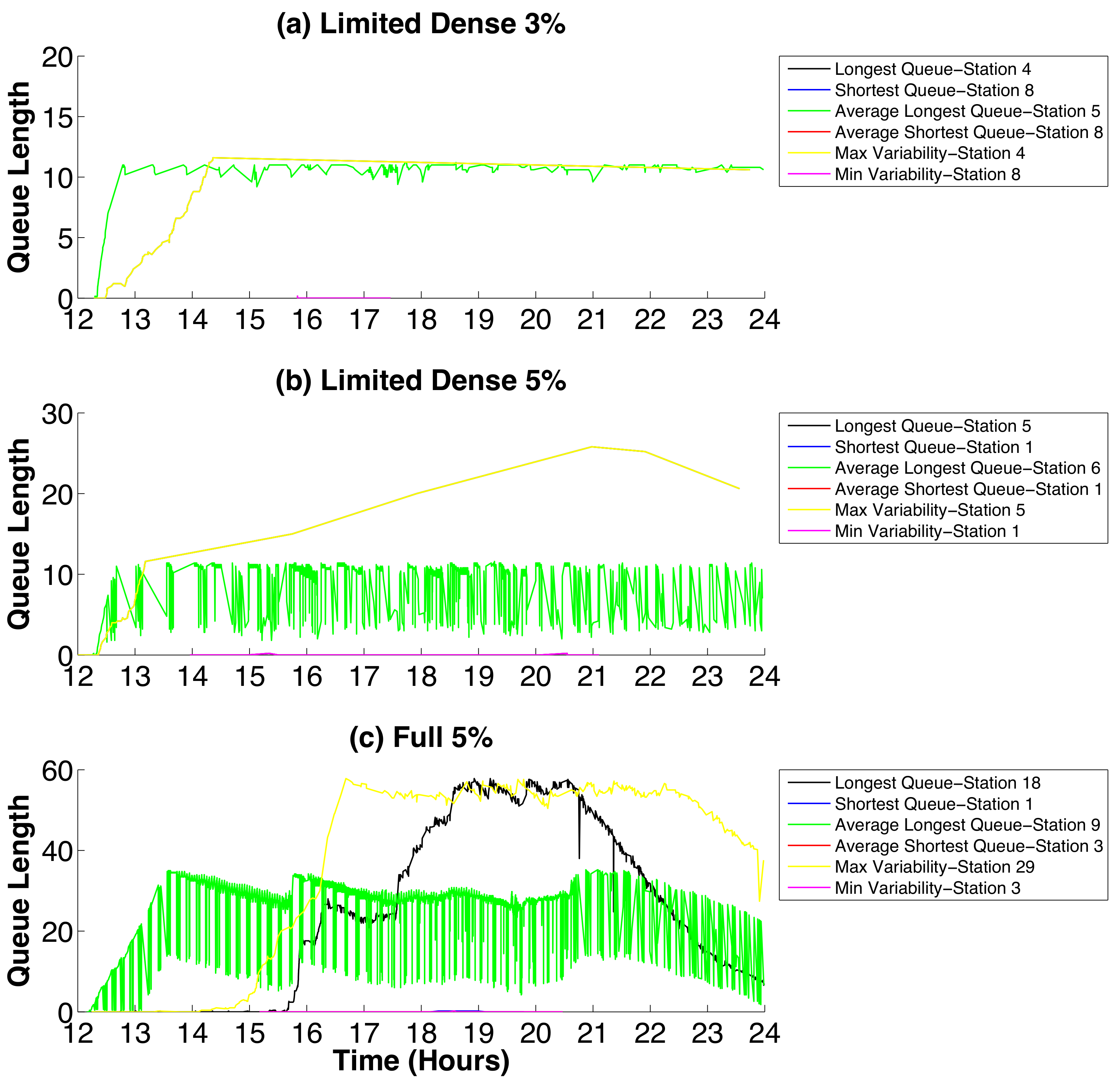
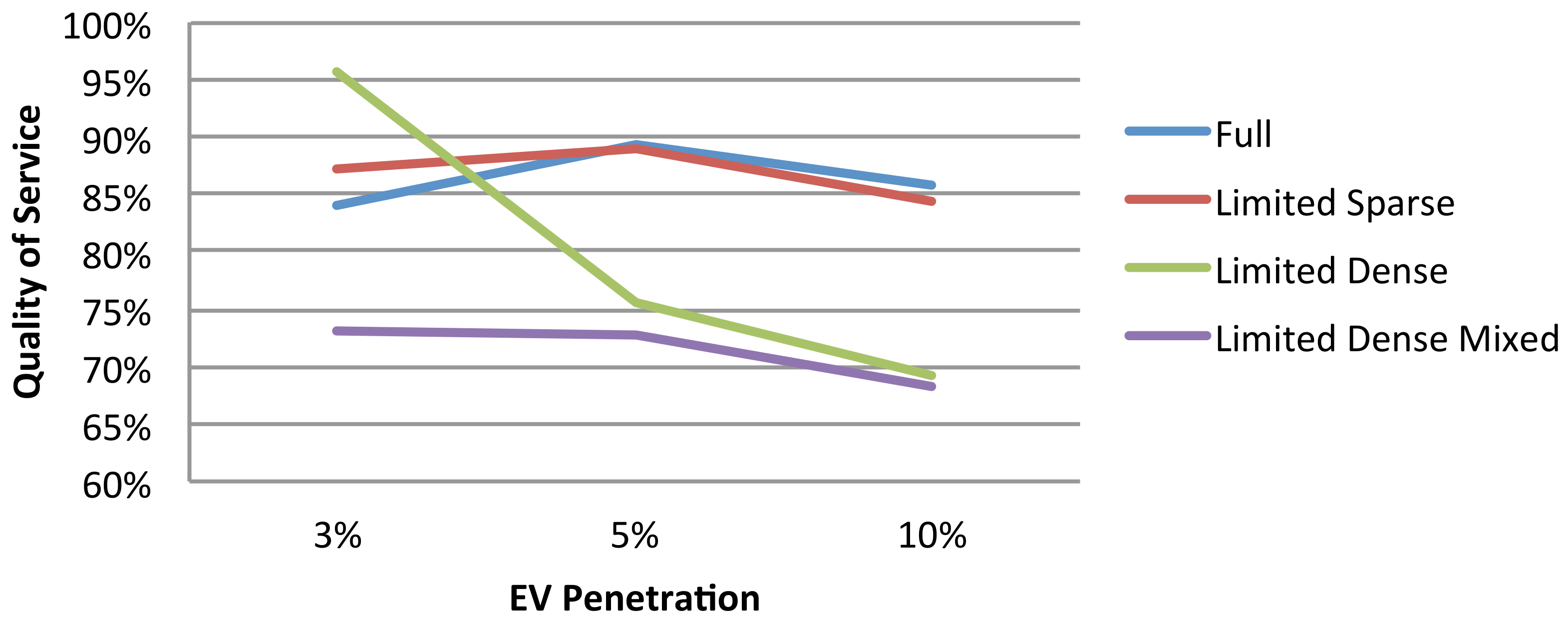
3.1. Transportation System Assessment
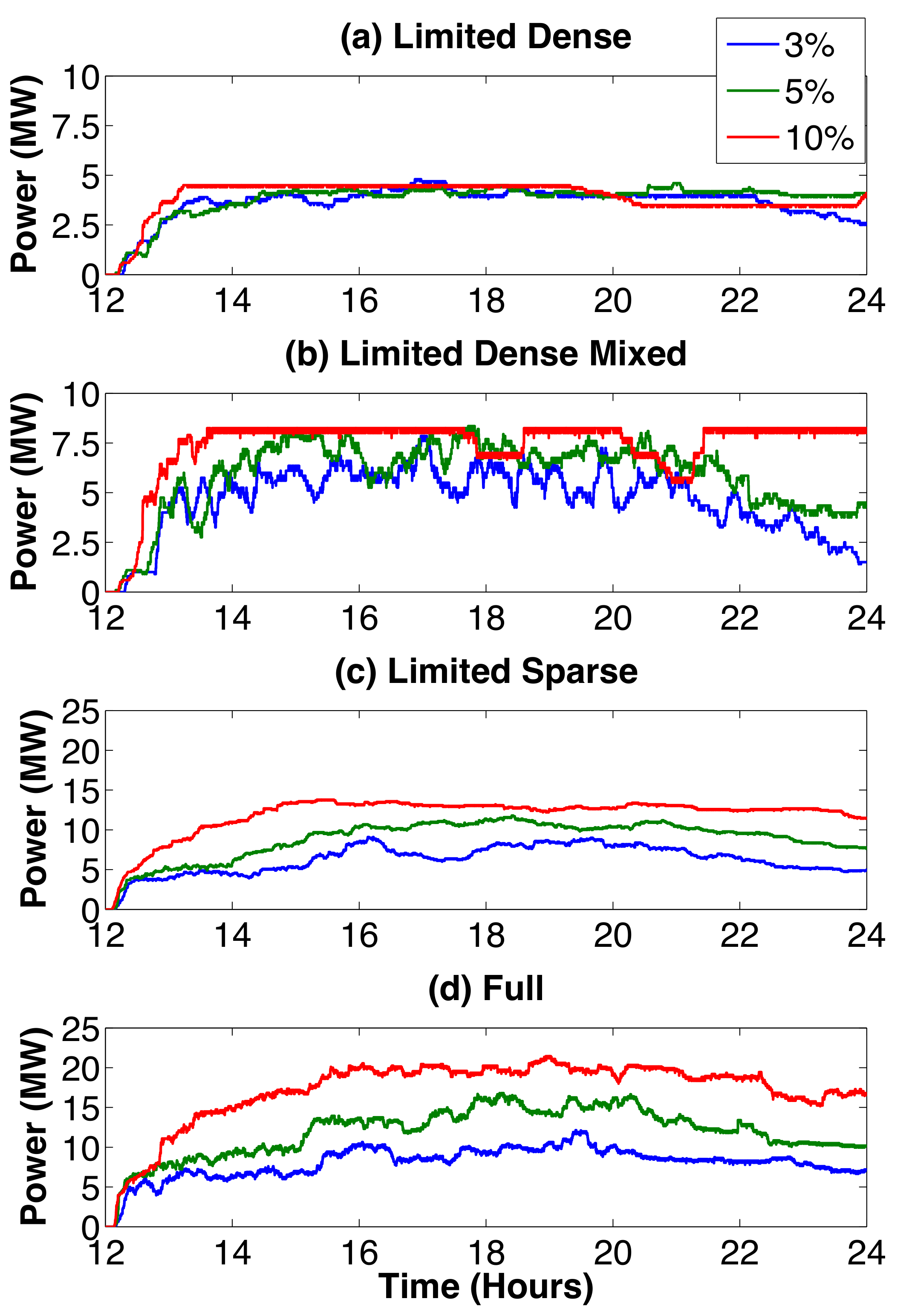
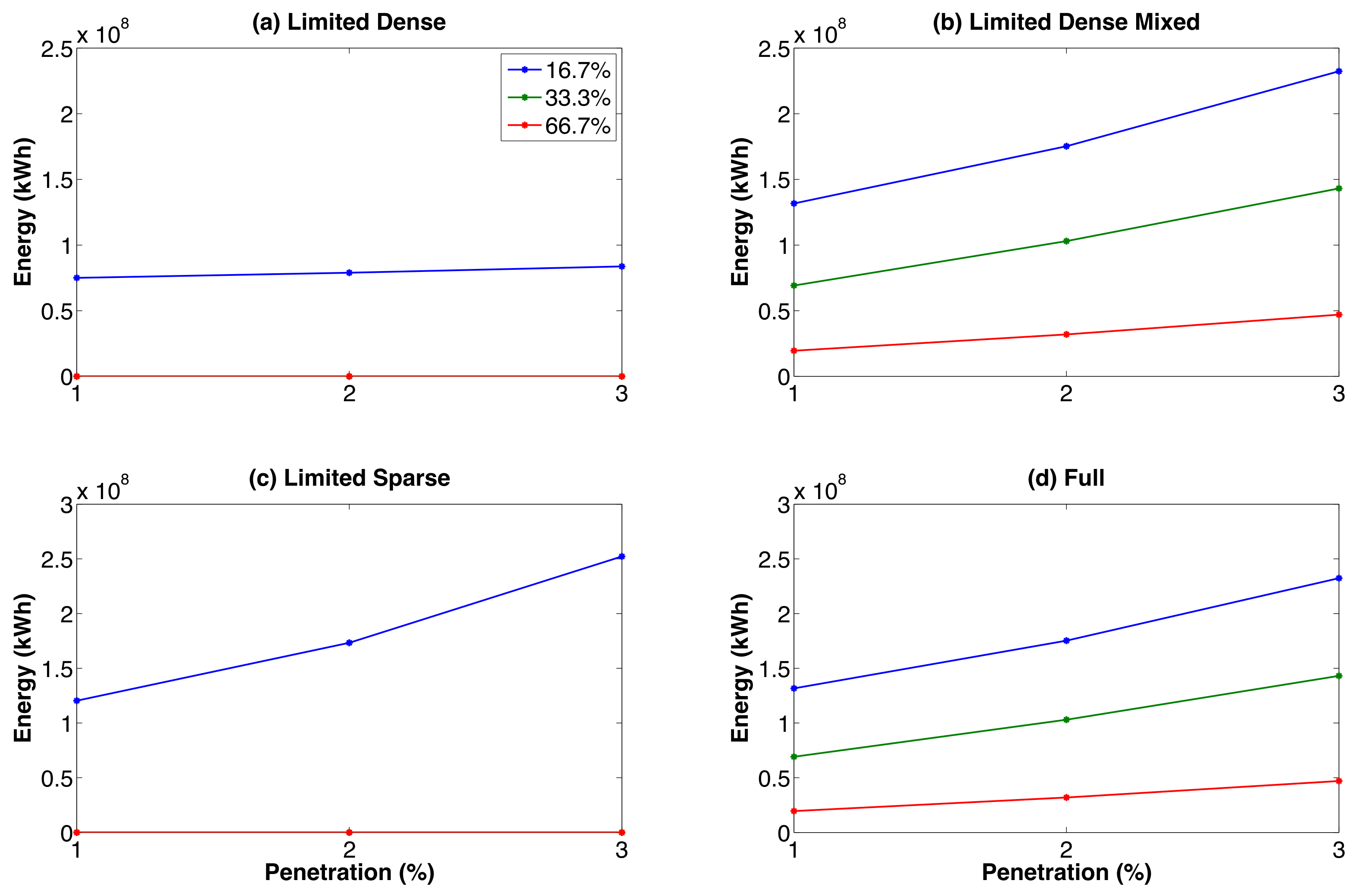
3.2. Power System Assessment
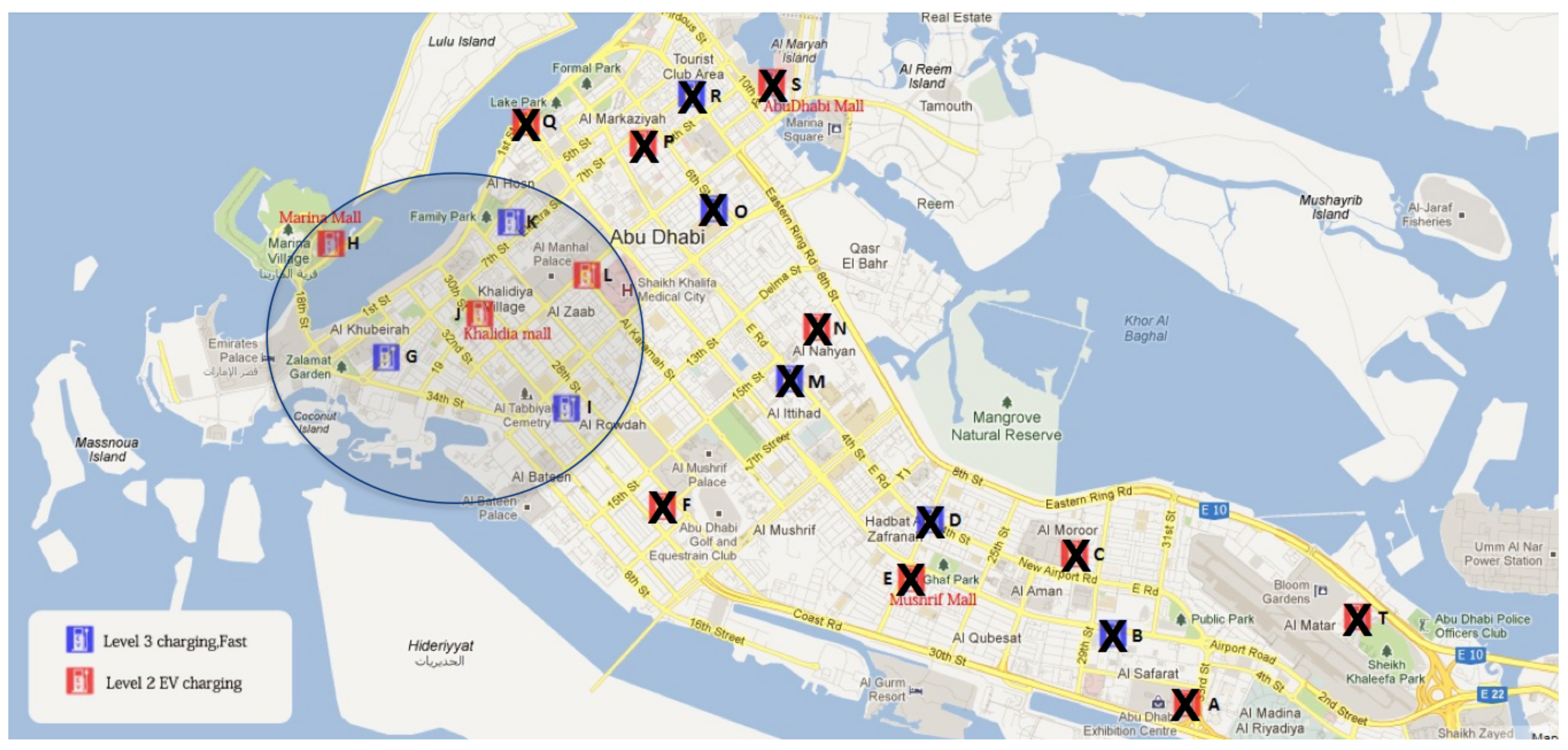
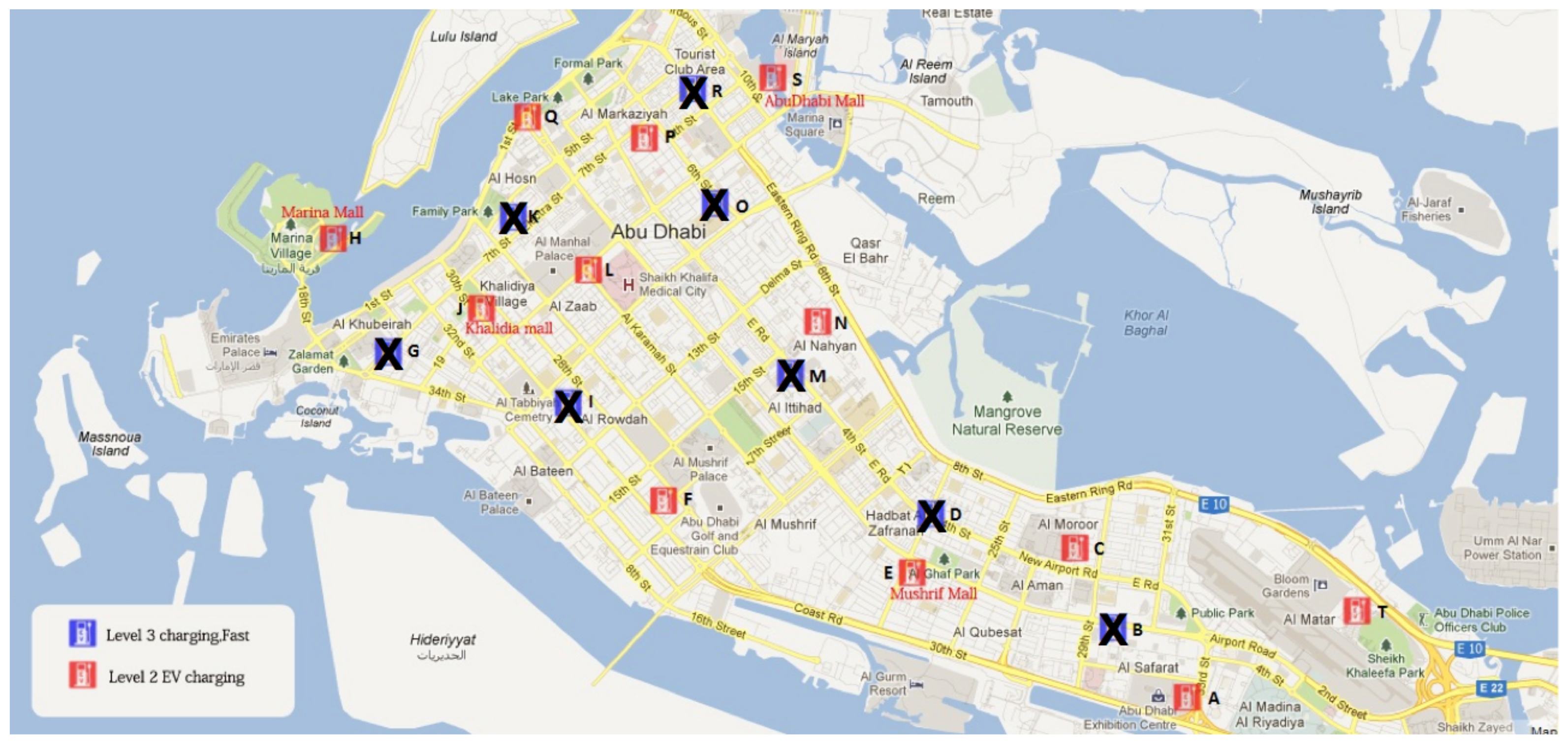
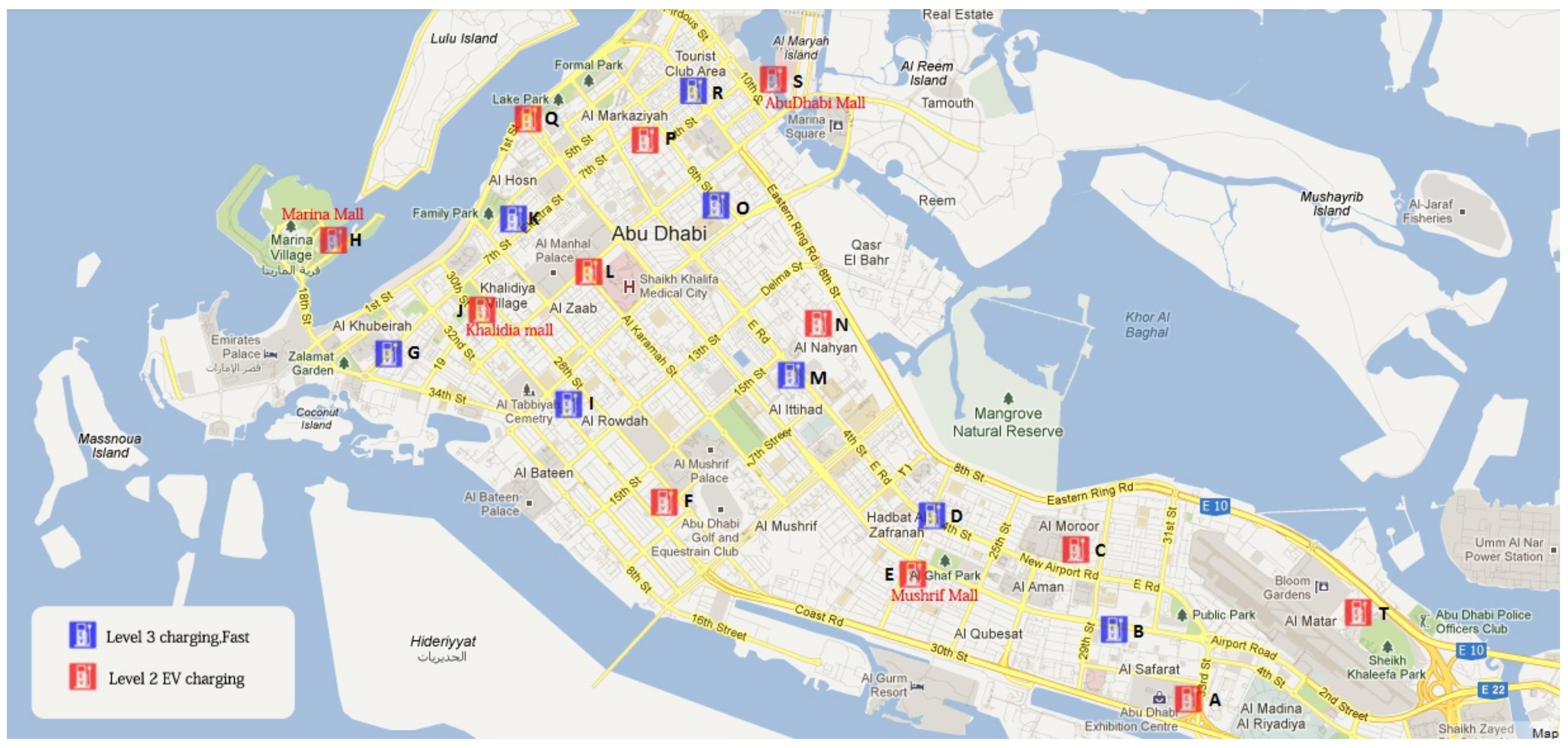
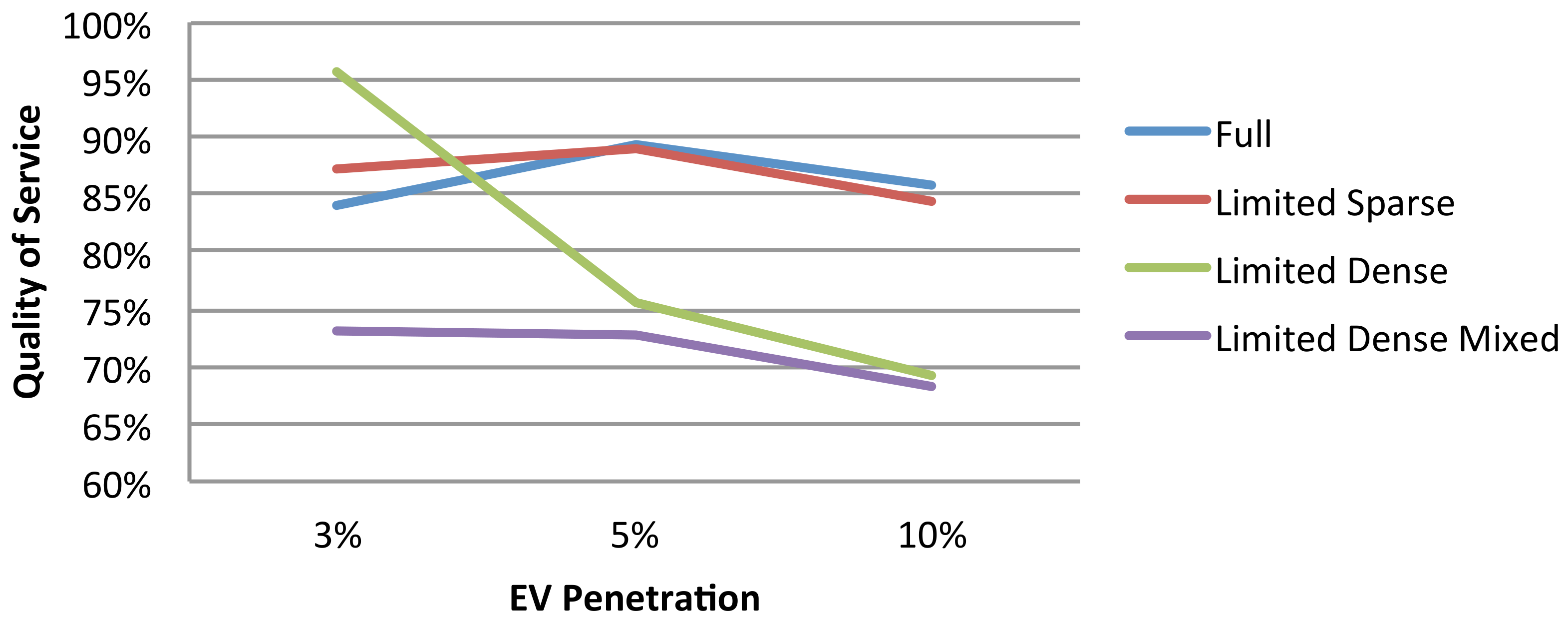
3.2.1. Limited Dense Charging System Design
3.2.2. Limited Dense Mixed Charging System Design
3.2.3. Limited Sparse Charging System Design
3.2.4. Full Charging System Design
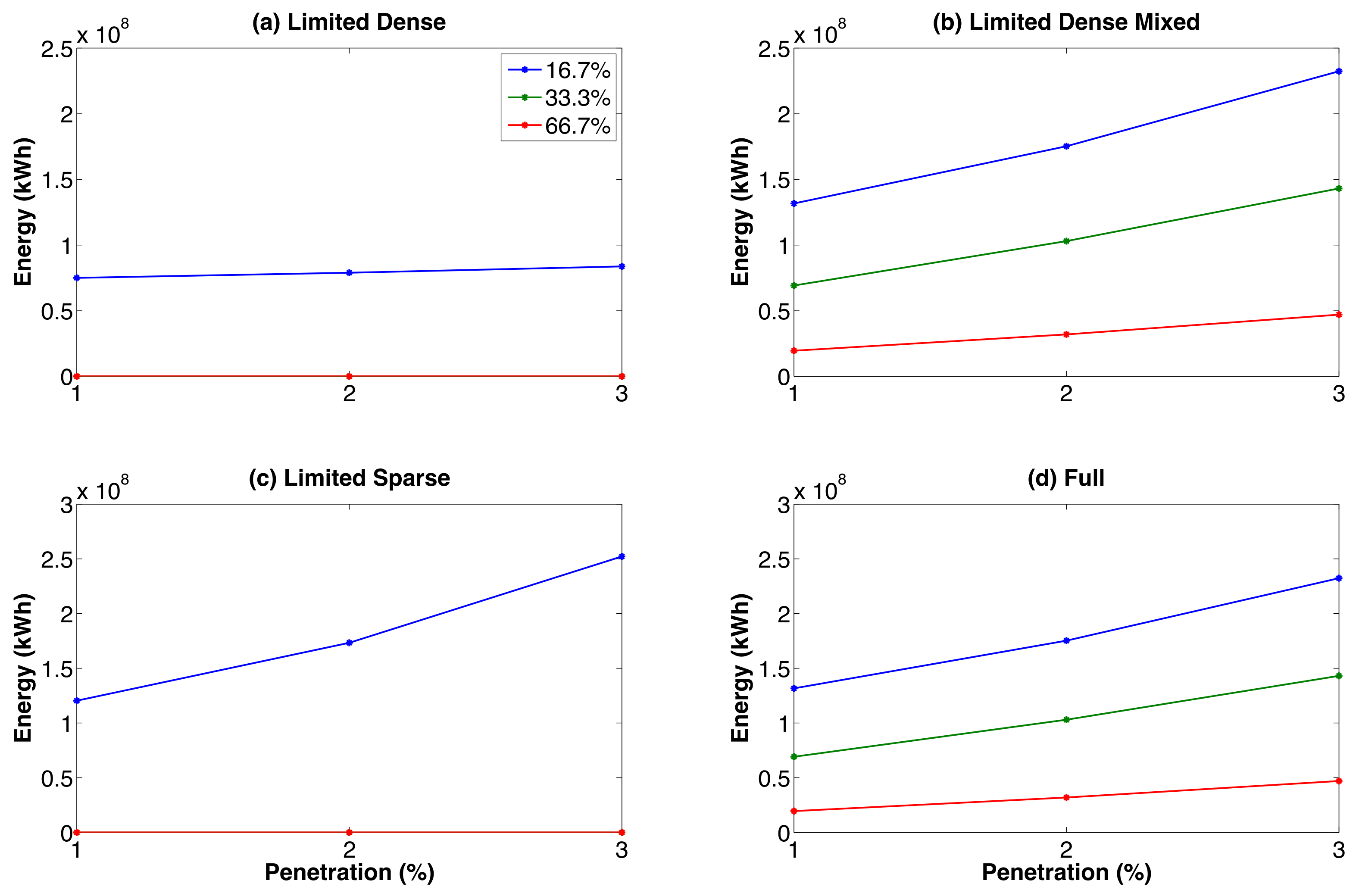
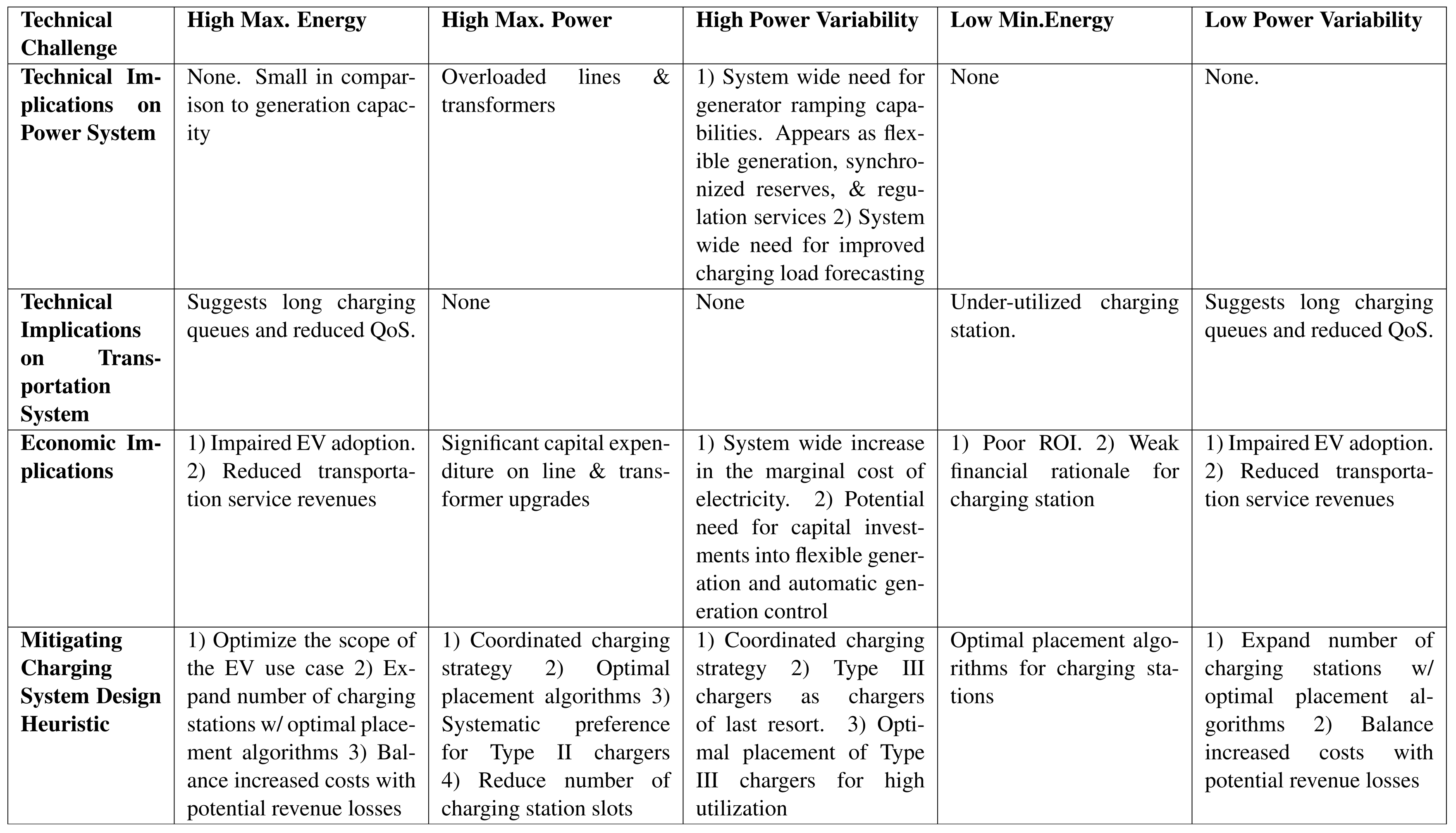
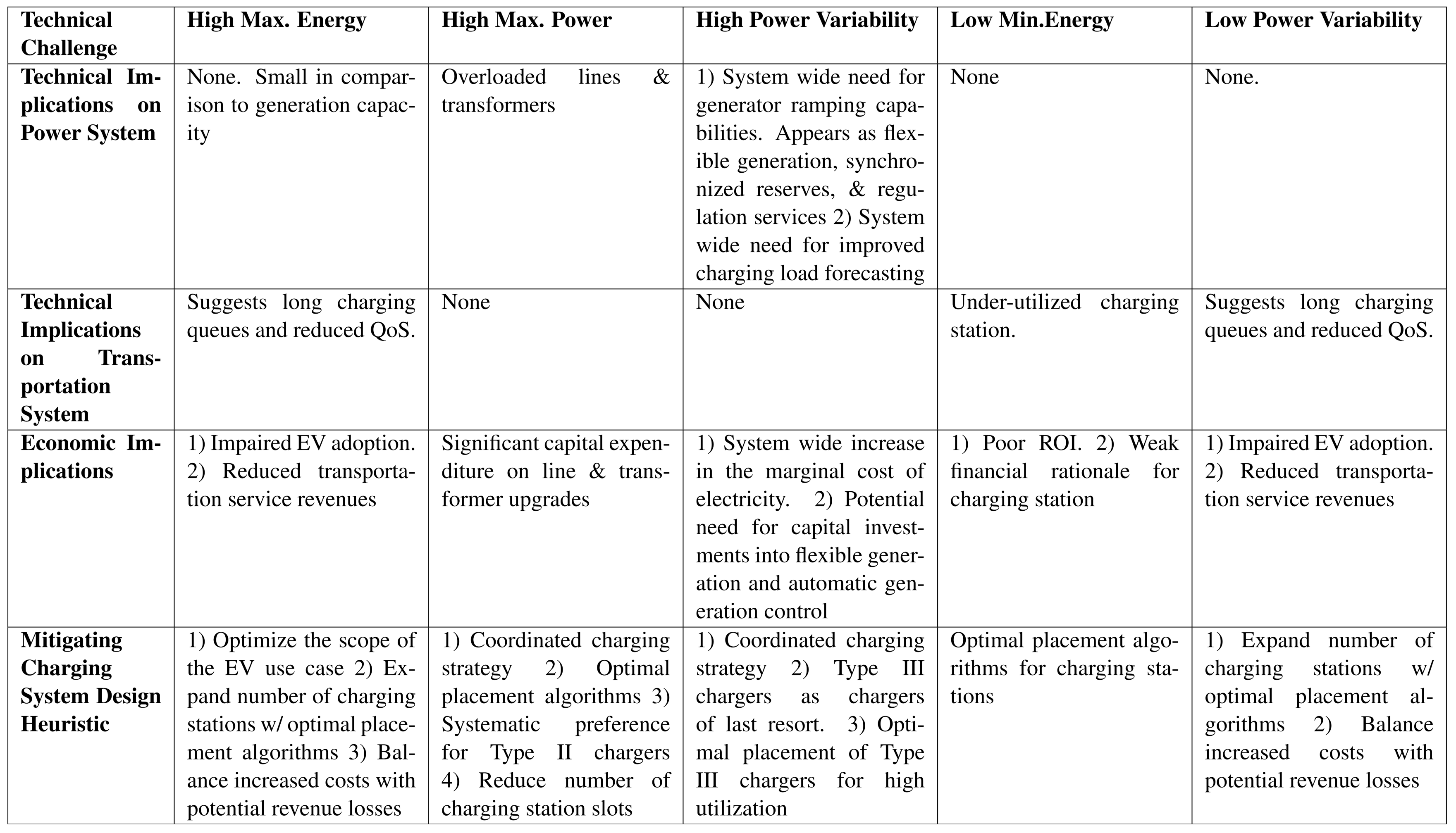
3.2.5. Summary of Power System Assessment
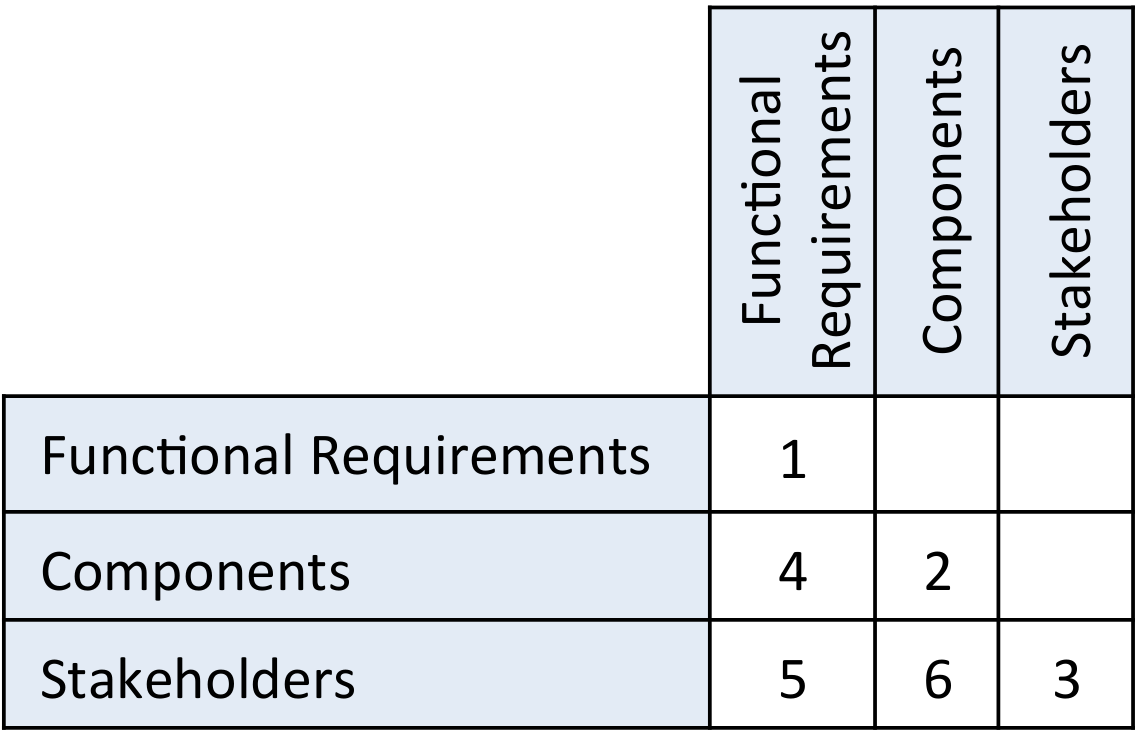
4. Discussion: The Need for an Intelligent Transportation-Energy System
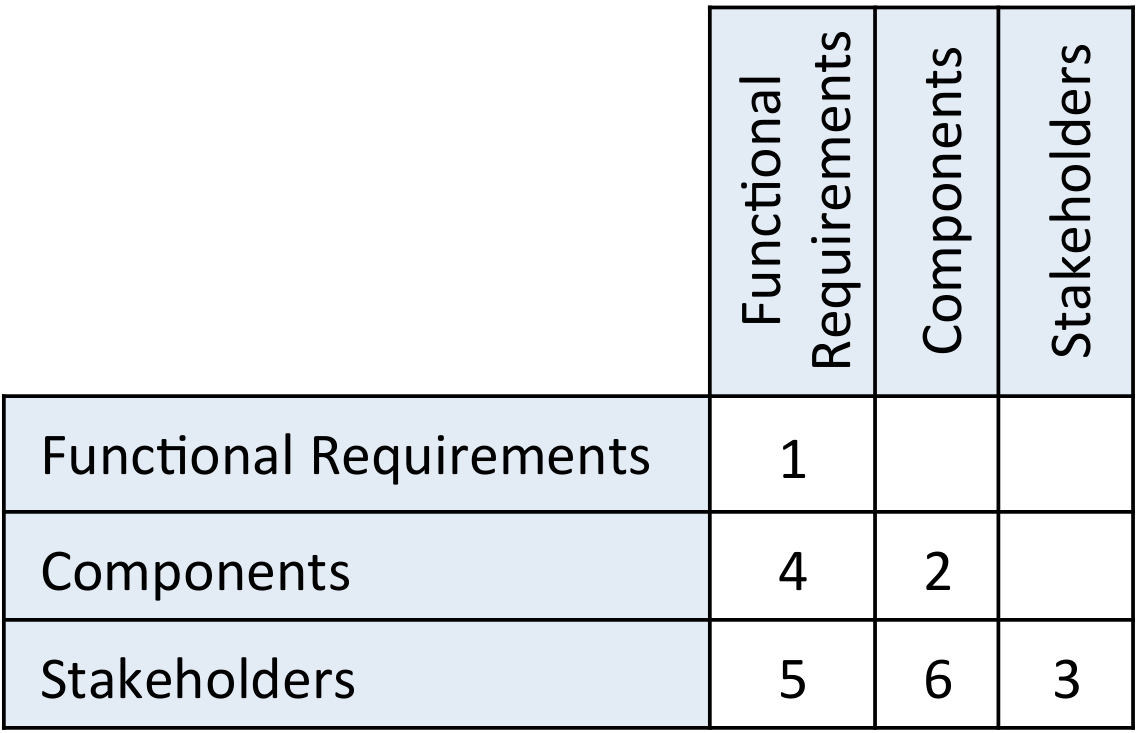
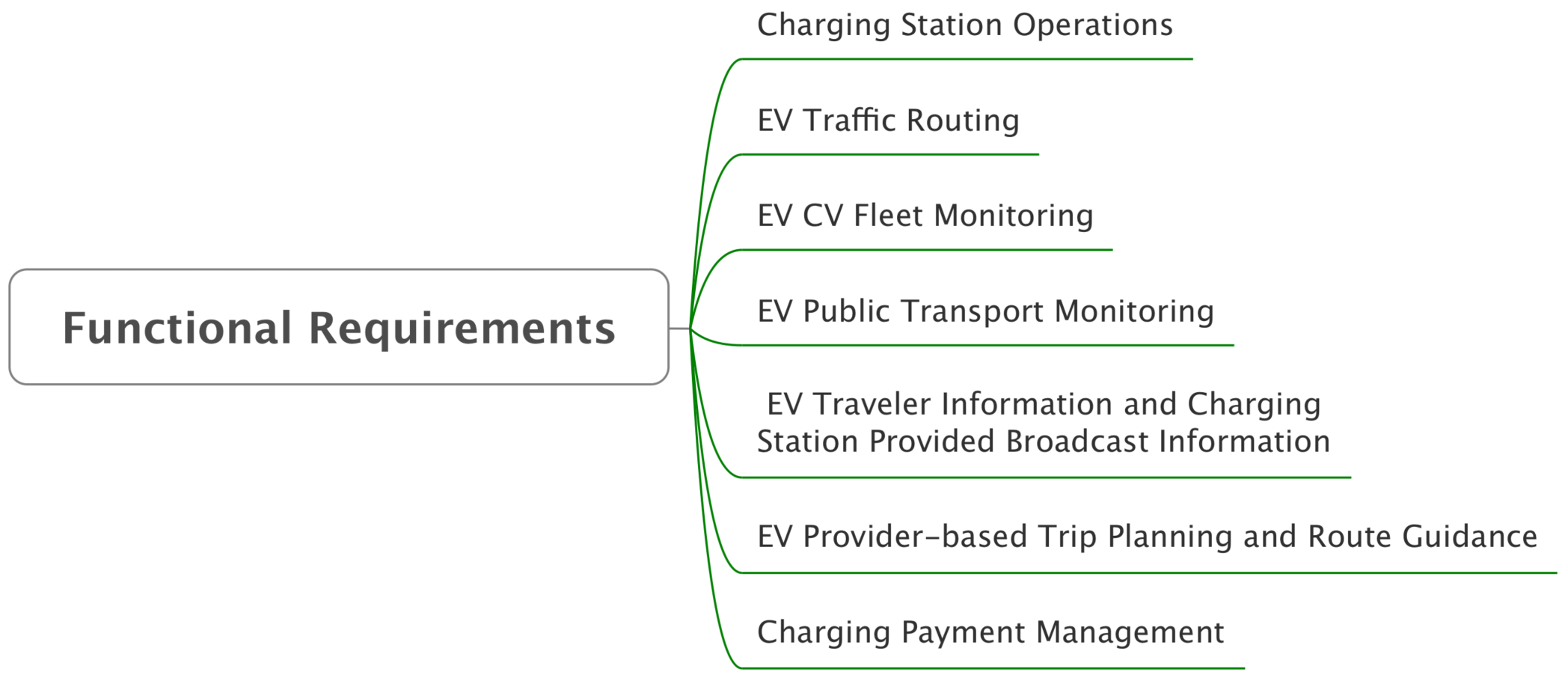
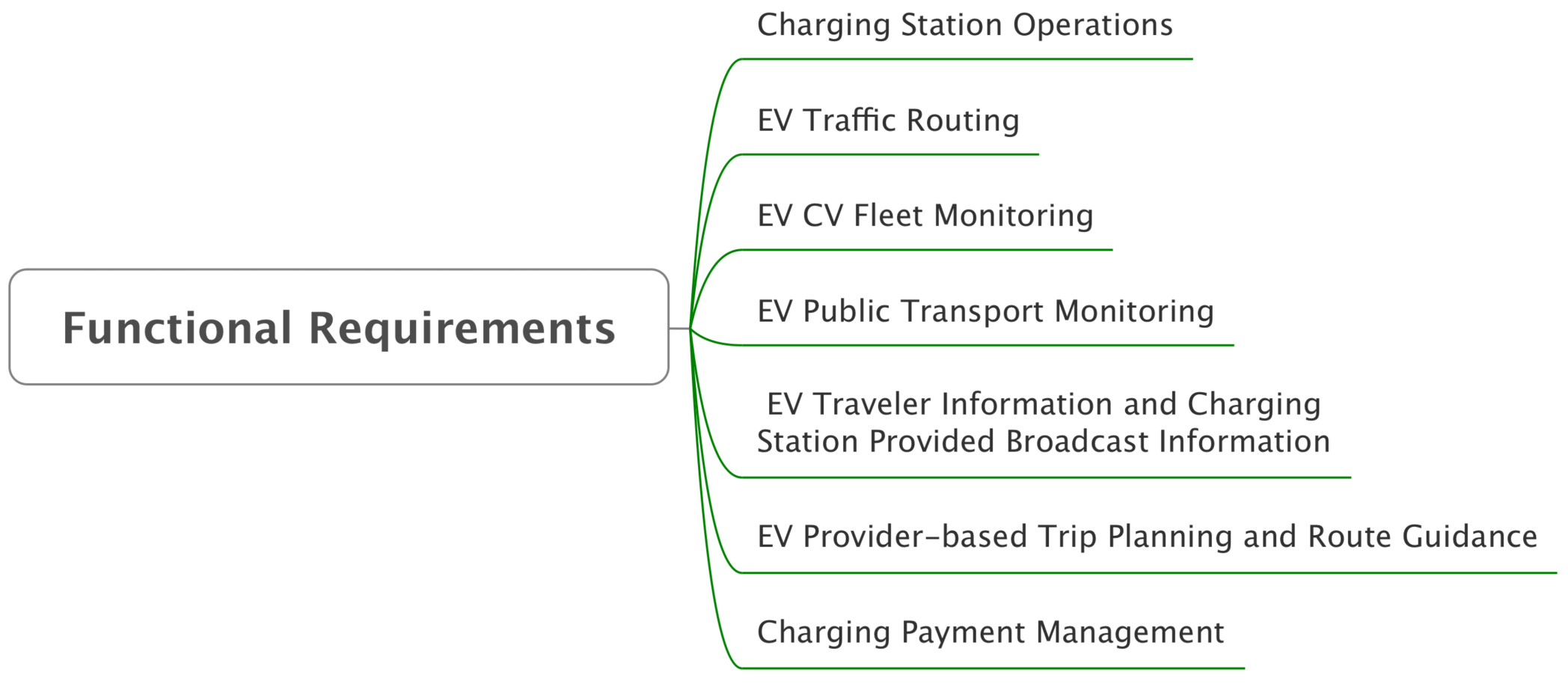
4.1. Integration of Functional Requirements
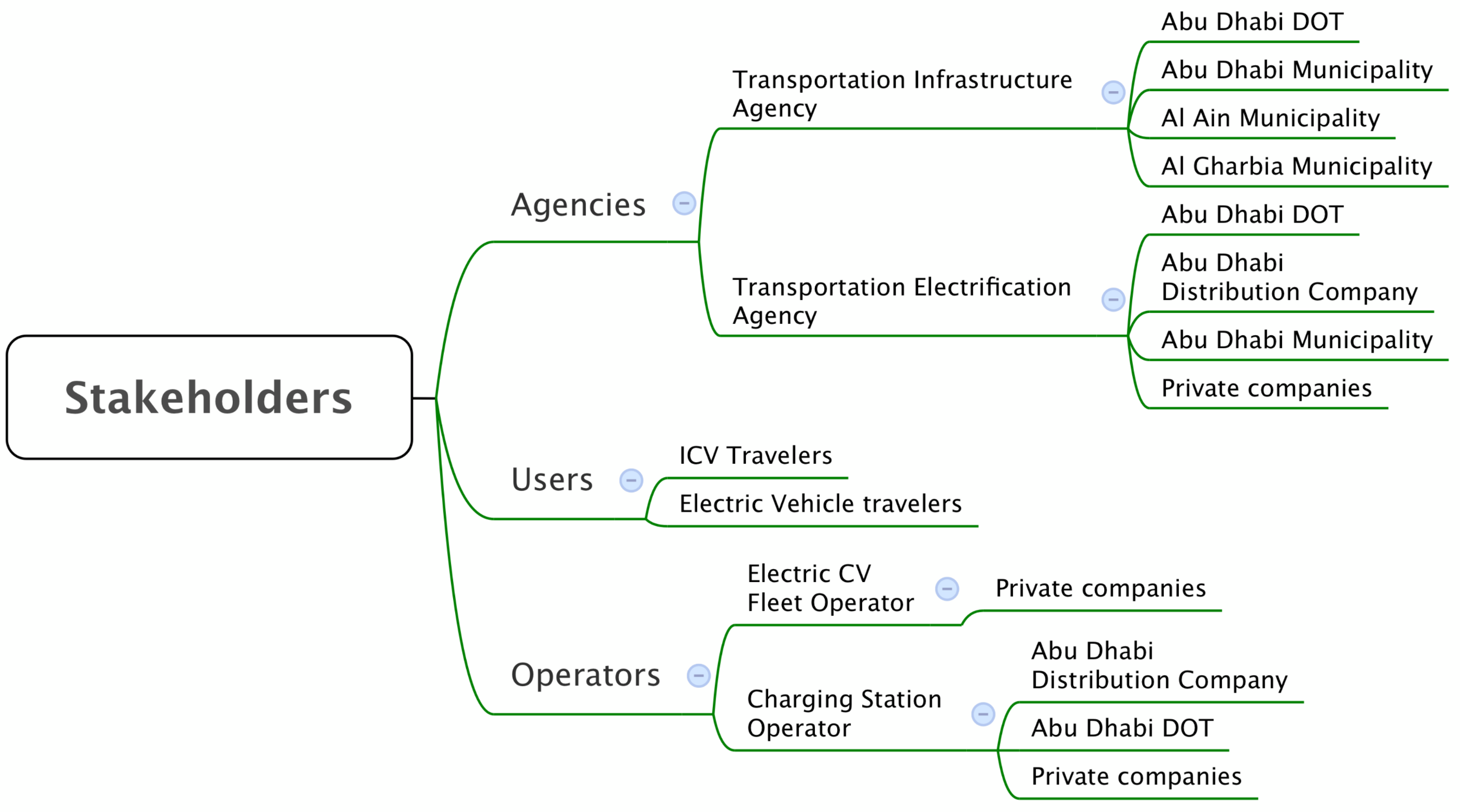
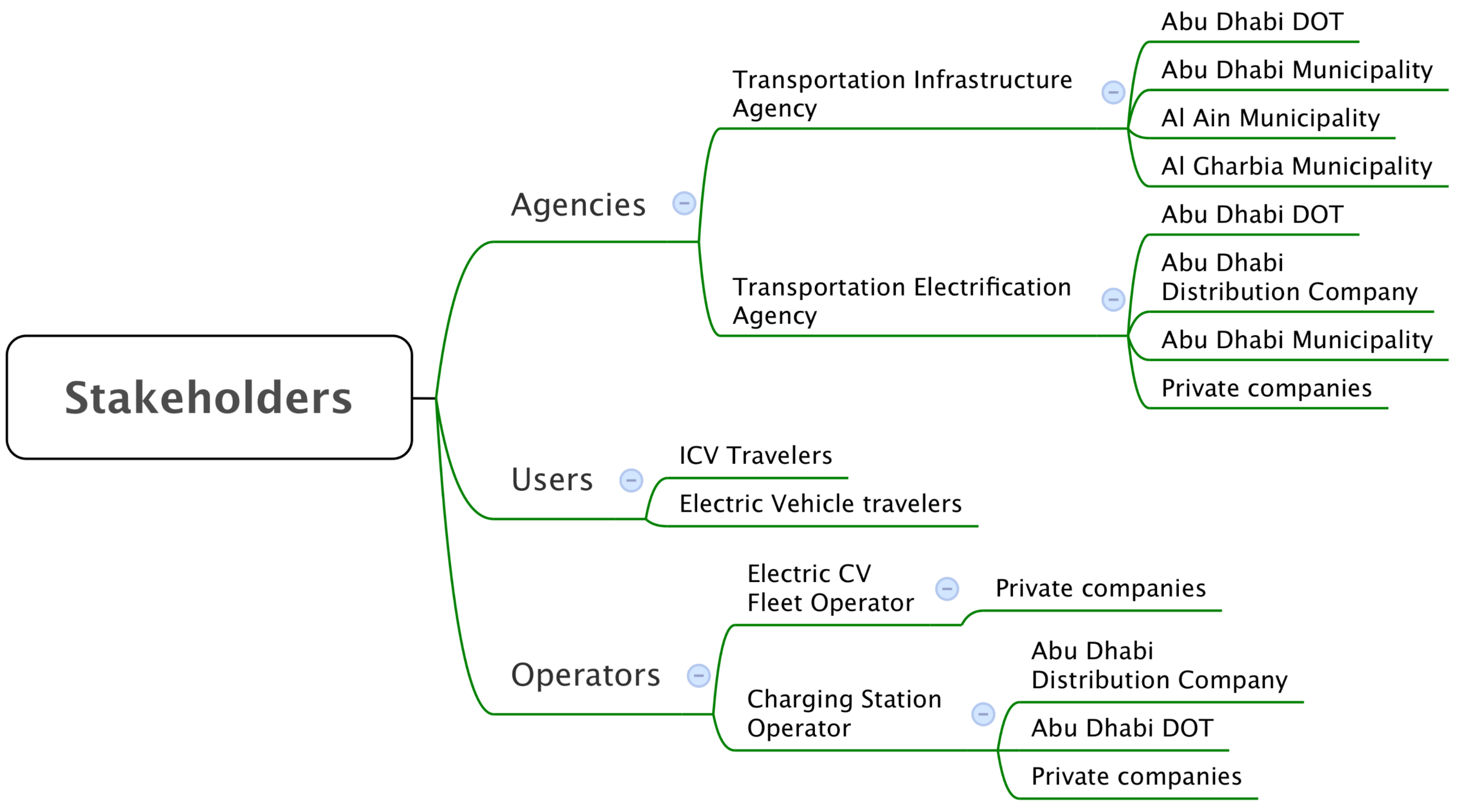
4.2. Integration of Stakeholders
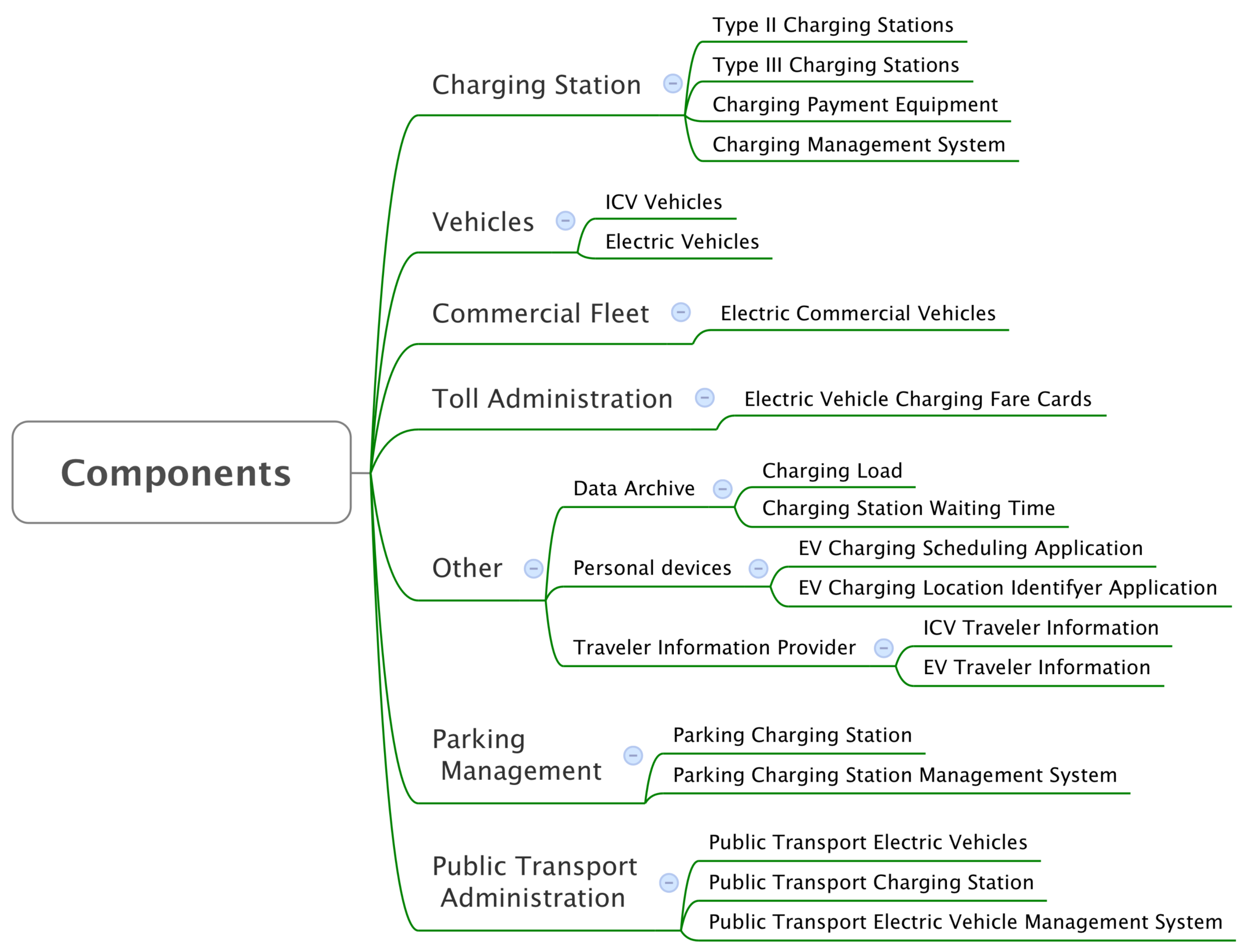
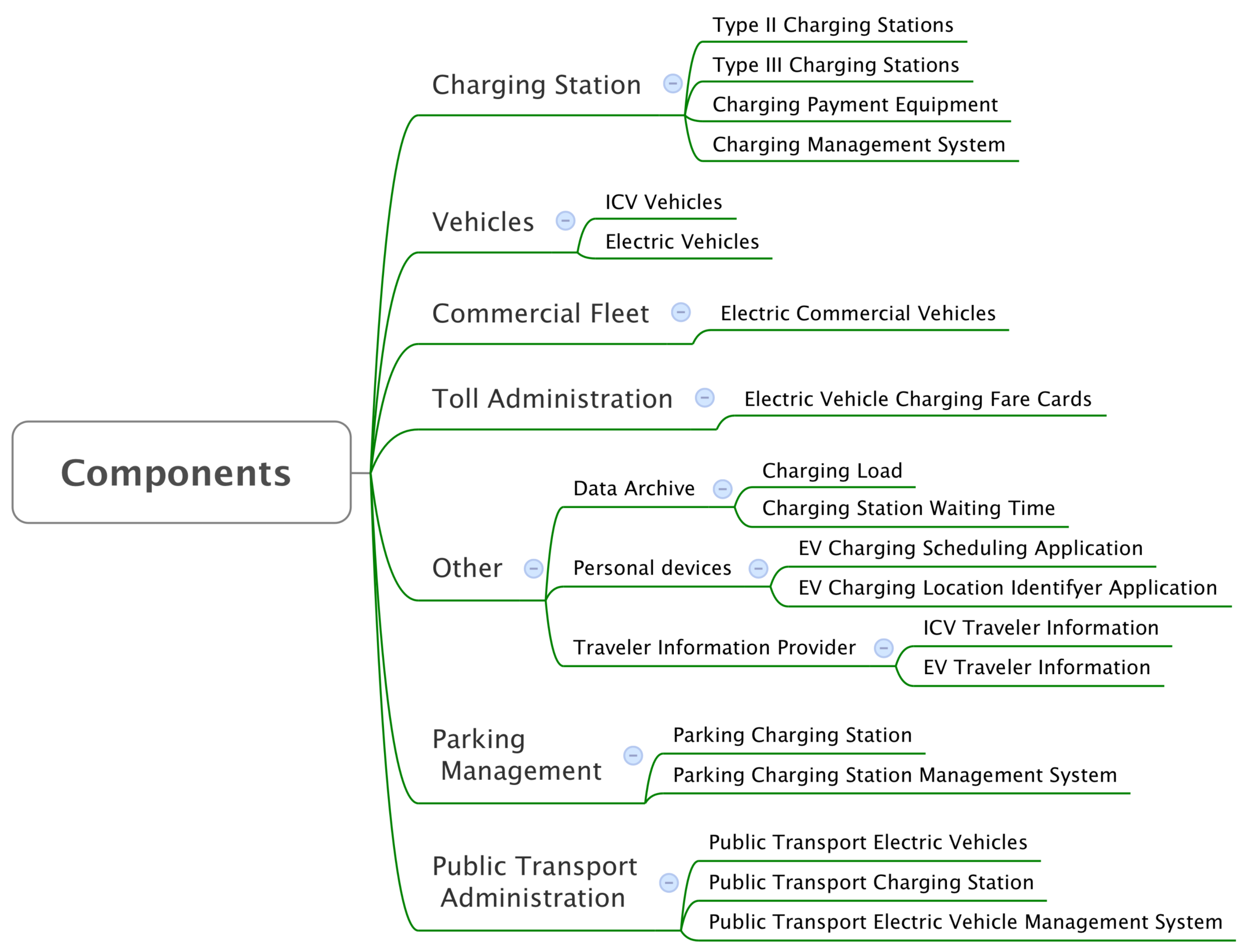
4.3. Integration of Components
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Junaibi, R.A.; Farid, A.M. A Method for the Technical Feasibility Assessment of Electrical Vehicle Penetration. In Proceedings of the 7th Annual IEEE Systems Conference, Orlando, FL, USA, 15–18 April 2013; pp. 1–6. [Google Scholar]
- Junaibi, R.A. Technical Feasibility Assessment of Electric Vehicles in Abu Dhabi. Master’s Thesis, Masdar Institute of Science and Technology, Abu Dhabi, United Arab Emirates, 2013. [Google Scholar]
- Al Junaibi, R.; Viswanath, A.; Farid, A.M. Technical Feasibility Assessment of Electric Vehicles: An Abu Dhabi Example. In Proceedings of the 2nd IEEE International Conference on Connected Vehicles and Expo, Las Vegas, NV, USA, 2–6 December 2013; pp. 1–8. [Google Scholar]
- Skippon, S.; Garwood, M. Responses to battery electric vehicles: UK consumer attitudes and attributions of symbolic meaning following direct experience to reduce psychological distance. Transp. Res. Part Transp. Environ. 2011, 16, 525–531. [Google Scholar] [CrossRef]
- Pointon, J. The Multi-Unit Dwelling Vehicle Charging Challenge. In Proceedings of the Electric Vehicles Virtual Summit 2012. The Smart Grid Observer, Virtual Online. 13 September 2012; Volume 69. [Google Scholar]
- Pieltain Fernandez, L.; Roman, T.G.S.; Cossent, R.; Domingo, C.M.; Fria, A.P. Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks. IEEE Trans. Power Syst. 2011, 26, 206–213. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of Electric Vehicles in the Electric Power System. Proc. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef] [Green Version]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of Load Demand Due to EV Battery Charging in Distribution Systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Dyke, K.J.; Schofield, N.; Barnes, M. The Impact of Transport Electrification on Electrical Networks. IEEE Trans. Ind. Electron. 2010, 57, 3917–3926. [Google Scholar] [CrossRef]
- Galus, M.; Zima, M.; Andersson, G. On integration of plug-in hybrid electric vehicles into existing power system structures. Energy Policy 2010, 38, 6736–6745. [Google Scholar] [CrossRef]
- Perujo, A.; Ciuffo, B. The introduction of electric vehicles in the private fleet: Potential impact on the electric supply system and on the environment. A case study for the Province of Milan, Italy. Energy Policy 2010, 38, 4549–4561. [Google Scholar] [CrossRef]
- Soares, J.A.; Canizes, B.; Lobo, C.; Vale, Z.; Morais, H. Electric Vehicle Scenario Simulator Tool for Smart Grid Operators. Energies 2012, 5, 1881–1899. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, M.A.; Sadek, A.W. Fundamentals of Intelligent Transportation Systems Planning; Artech House: Boston, MA, USA, 2003; p. xvii. 190p. [Google Scholar]
- Su, W.; Eichi, H.; Zeng, W.; Chow, M.Y. A Survey on the Electrification of Transportation in a Smart Grid Environment. IEEE Trans. Ind. Inform. 2012, 8. [Google Scholar] [CrossRef]
- Viswanath, A.; Farid, A.M. A Hybrid Dynamic System Model for the Assessment of Transportation Electrification. In Proceedings of the American Control Conference 2014, Portland, OR, USA, 4–6 June 2014; pp. 1–7. [Google Scholar]
- Farid, A.M. Electrified Transportation System Performance: Conventional vs. Online Electric Vehicles. In The On-line Electric Vehicle: Wireless Electric Ground Transportation Systems; Suh, N.P., Cho, D.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Chapter 20; pp. 279–313. [Google Scholar]
- Farid, A.M. Symmetrica: Test Case for Transportation Electrification Research. Infrastruct. Complex. 2015, 2, 9. [Google Scholar] [CrossRef] [Green Version]
- Farid, A.M. A Hybrid Dynamic System Model for Multi-Modal Transportation Electrification. IEEE Trans. Control Syst. Technol. 2016, 25, 940–951. [Google Scholar] [CrossRef]
- Allan, D.F.; Mezher, T.; Farid, A.M. Enhanced Electric Vehicle Adoption Scenarios for Abu Dhabi Road Transportation. In Proceedings of the UAE Graduate Students Research Conference, Abu Dhabi, United Arab Emirates, 27 April 2016; pp. 1–2. [Google Scholar]
- Van der Wardt, T.J.; Farid, A.M. A Hybrid Dynamic System Assessment Methodology for Multi-Modal Transportation-Electrification. Energies 2017, 10, 653. [Google Scholar] [CrossRef] [Green Version]
- Allan, D.F.; Farid, A.M. A Benchmark Analysis of Open Source Transportation-Electrification Simulation Tools. In Proceedings of the 2015 IEEE Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1–7. [Google Scholar]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics: Data, Models and Simulation; Springer: Heidelberg, Germany; New York, NY, USA, 2013; p. xiii. 503p. [Google Scholar]
- Barcelo, J. Fundamentals of Traffic Simulation; Springer: New York, NY, USA, 2010; p. xvii. 440p. [Google Scholar]
- Alecsandru, C.D. A Stochastic Mesoscopic Cell-Transmission Model for Operational Analysis of Large-Scale Transportation Networks. Ph.D. Thesis, Louisiana State University, Baton Rouge, LA, USA, 2006. [Google Scholar]
- Kassakian, J.G.; Schmalensee, R.; Desgroseilliers, G.; Heidel, T.D.; Afridi, K.; Farid, A.M.; Grochow, J.M.; Hogan, W.W.; Jacoby, H.D.; Kirtley, J.L.; et al. The Future of the Electric Grid: An Interdisciplinary MIT Study; MIT Press: Cambridge, MA, USA, 2011; pp. 1–280. [Google Scholar]
- Doyle, A.; Muneer, T. Energy consumption and modelling of the climate control system in the electric vehicle. Energy Explor. Exploit. 2019, 37, 519–543. [Google Scholar] [CrossRef] [Green Version]
- González Palencia, J.C.; Nguyen, V.T.; Araki, M.; Shiga, S. The Role of Powertrain Electrification in Achieving Deep Decarbonization in Road Freight Transport. Energies 2020, 13, 2459. [Google Scholar] [CrossRef]
- Anonymous. Systems Engineering for Intelligent Transportation Systems: An Introduction for Transportation Professionals; Technical Report; U.S. Department of Transportation Federal Highway Administration Federal Transit Administration: Washington, DC, USA, 2007. [Google Scholar]
- Rumbaugh, J.; Jacobson, I.; Booch, G. The Unified Modeling Language Reference Manual; Addison-Wesley: Boston, MA, USA, 2005. [Google Scholar]
- Eppinger, S.D.; Browning, T.R. Design Structure Matrix Methods and Applications; MIT Press: Cambridge, MA, USA, 2012; p. xii. 334p. [Google Scholar]
- Hadhrami, M.A.; Viswanath, A.; Junaibi, R.A.; Farid, A.M.; Sgouridis, S. Evaluation of Electric Vehicle Adoption Potential in Abu Dhabi; Technical Report; Masdar Institute of Science and Technology: Abu Dhabi, United Arab Emirates, 2013. [Google Scholar]
- PJM; Department of Operations Support. PJM Manual 12: Balancing Operations; Technical Report; PJM: Norristown, PA, USA, 2011. [Google Scholar]
- Sonoda, T.; Kawaguchi, K.; Kamino, Y.; Koyanagi, Y.; Ogawa, H.; Ono, H. Environment-Conscious Urban Design Simulator “Clean Mobility Simulator”—Traffic Simulator that Includes Electric Vehicles. Mitsubishi Heavy Ind. Tech. Rev. 2012, 49, 78–83. [Google Scholar]
- Gan, L.; Topcu, U.; Low, S. Optimal decentralized protocol for electric vehicle charging. In Proceedings of the IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 5798–5804. [Google Scholar] [CrossRef] [Green Version]
- Wei, W.; Wu, L.; Wang, J.; Mei, S. Expansion planning of urban electrified transportation networks: A mixed-integer convex programming approach. IEEE Trans. Transp. Electrif. 2017, 3, 210–224. [Google Scholar] [CrossRef]
- Palomino, A.; Parvania, M. Advanced charging infrastructure for enabling electrified transportation. Electr. J. 2019, 32, 21–26. [Google Scholar] [CrossRef]
- Amini, M.H.; Mohammadi, J.; Kar, S. Distributed holistic framework for smart city infrastructures: Tale of interdependent electrified transportation network and power grid. IEEE Access 2019, 7, 157535–157554. [Google Scholar] [CrossRef]
- Amini, M.H. A panorama of interdependent power systems and electrified transportation networks. In Sustainable Interdependent Networks II; Springer: Berlin/Heidelberg, Germany, 2019; pp. 23–41. [Google Scholar]
- Ahman, M. Government policy and the development of electric vehicles in Japan. Energy Policy 2006, 34, 433–443. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Lund, H.; Kempton, W. Integration of renewable energy into the transport and electricity sectors through V2G. Energy Policy 2008, 36, 3578–3587. [Google Scholar] [CrossRef]
- Amini, M.H.; Mohammadi, J.; Kar, S. Distributed intelligent algorithm for interdependent electrified transportation and power networks. In Proceedings of the 9th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications, New York, NY, USA, 25–29 November 2019; pp. 73–79. [Google Scholar]
- Bartłomiejczyk, M. Potential application of solar energy systems for electrified urban transportation systems. Energies 2018, 11, 954. [Google Scholar] [CrossRef] [Green Version]
- Lv, S.; Wei, Z.; Sun, G.; Chen, S.; Zang, H. Optimal power and semi-dynamic traffic flow in urban electrified transportation networks. IEEE Trans. Smart Grid 2019, 11, 1854–1865. [Google Scholar] [CrossRef]
- Wei, W.; Mei, S.; Wu, L.; Shahidehpour, M.; Fang, Y. Optimal traffic-power flow in urban electrified transportation networks. IEEE Trans. Smart Grid 2016, 8, 84–95. [Google Scholar] [CrossRef]
- Amini, M.H.; Karabasoglu, O. Optimal operation of interdependent power systems and electrified transportation networks. Energies 2018, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Anonymous. The Abu Dhabi Economic Vision 2030; Technical Report; The Government of the Emirate of Abu Dhabi: Abu Dhabi, United Arab Emirates, 2008. [Google Scholar]
- Gomez Exposito, A.; Conejo, A.J.; Canizares, C. Electric Energy Systems: Analysis and Operation; The Electr; CRC: Boca Raton, FL, USA, 2008; Chapter 127–164. [Google Scholar]
- Schavemaker, P.; Van der Sluis, L.; Books24x7 Inc. Electrical Power System Essentials; Wiley: Chichester, UK; Hoboken, NJ, USA, 2008; p. xiii. 325p. [Google Scholar]
- Wood, A.J.; Wollenberg, B.F. Power Generation, Operation, and Control, 2nd ed.; J. Wiley & Sons: New York, NY, USA, 1996; Volume 2, pp. 1–593. [Google Scholar]
- Brown, S.; Pyke, D.; Steenhof, P. Electric vehicles: The role and importance of standards in an emerging market. Energy Policy 2010, 38, 3797–3806. [Google Scholar] [CrossRef]
- Li, Z.; Ouyang, M. The pricing of charging for electric vehicles in China—Dilemma and solution. Energy 2011, 36, 5765–5778. [Google Scholar] [CrossRef]
- Mak, S.T. Knowledge Based Architecture Serving As a Rigid Framework for Smart Grid Applications. In Proceedings of the Innovative Smart Grid Technologies (ISGT), Gaithersburg, MD, USA, 19–21 January 2010; p. 8. [Google Scholar]
- Gong, Q.; Li, Y.; Peng, Z.R. Optimal Power Management of Plug-in HEV with Intelligent Transportation System. In Proceedings of the 2007 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 4–7 September 2007; pp. 1–6. [Google Scholar] [CrossRef]
- ADDOT-Anonymous. Abu Dhabi Intelligent Transportation Systems: Strategy Architecture and Implementation Action Plan 2010–2030; Technical Report 3; Abu Dhabi Department of Transportation: Abu Dhabi, United Arab Emirates, 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farid, A.M.; Viswanath, A.; Al-Junaibi, R.; Allan, D.; Van der Wardt, T.J.T. Electric Vehicle Integration into Road Transportation, Intelligent Transportation, and Electric Power Systems: An Abu Dhabi Case Study. Smart Cities 2021, 4, 1039-1057. https://doi.org/10.3390/smartcities4030055
Farid AM, Viswanath A, Al-Junaibi R, Allan D, Van der Wardt TJT. Electric Vehicle Integration into Road Transportation, Intelligent Transportation, and Electric Power Systems: An Abu Dhabi Case Study. Smart Cities. 2021; 4(3):1039-1057. https://doi.org/10.3390/smartcities4030055
Chicago/Turabian StyleFarid, Amro M., Asha Viswanath, Reem Al-Junaibi, Deema Allan, and Thomas J. T. Van der Wardt. 2021. "Electric Vehicle Integration into Road Transportation, Intelligent Transportation, and Electric Power Systems: An Abu Dhabi Case Study" Smart Cities 4, no. 3: 1039-1057. https://doi.org/10.3390/smartcities4030055
APA StyleFarid, A. M., Viswanath, A., Al-Junaibi, R., Allan, D., & Van der Wardt, T. J. T. (2021). Electric Vehicle Integration into Road Transportation, Intelligent Transportation, and Electric Power Systems: An Abu Dhabi Case Study. Smart Cities, 4(3), 1039-1057. https://doi.org/10.3390/smartcities4030055