Ambient Vibration Testing of a Pedestrian Bridge Using Low-Cost Accelerometers for SHM Applications



Abstract
:1. Introduction
2. Bridge Description
3. System Identification
3.1. Finite Element Model
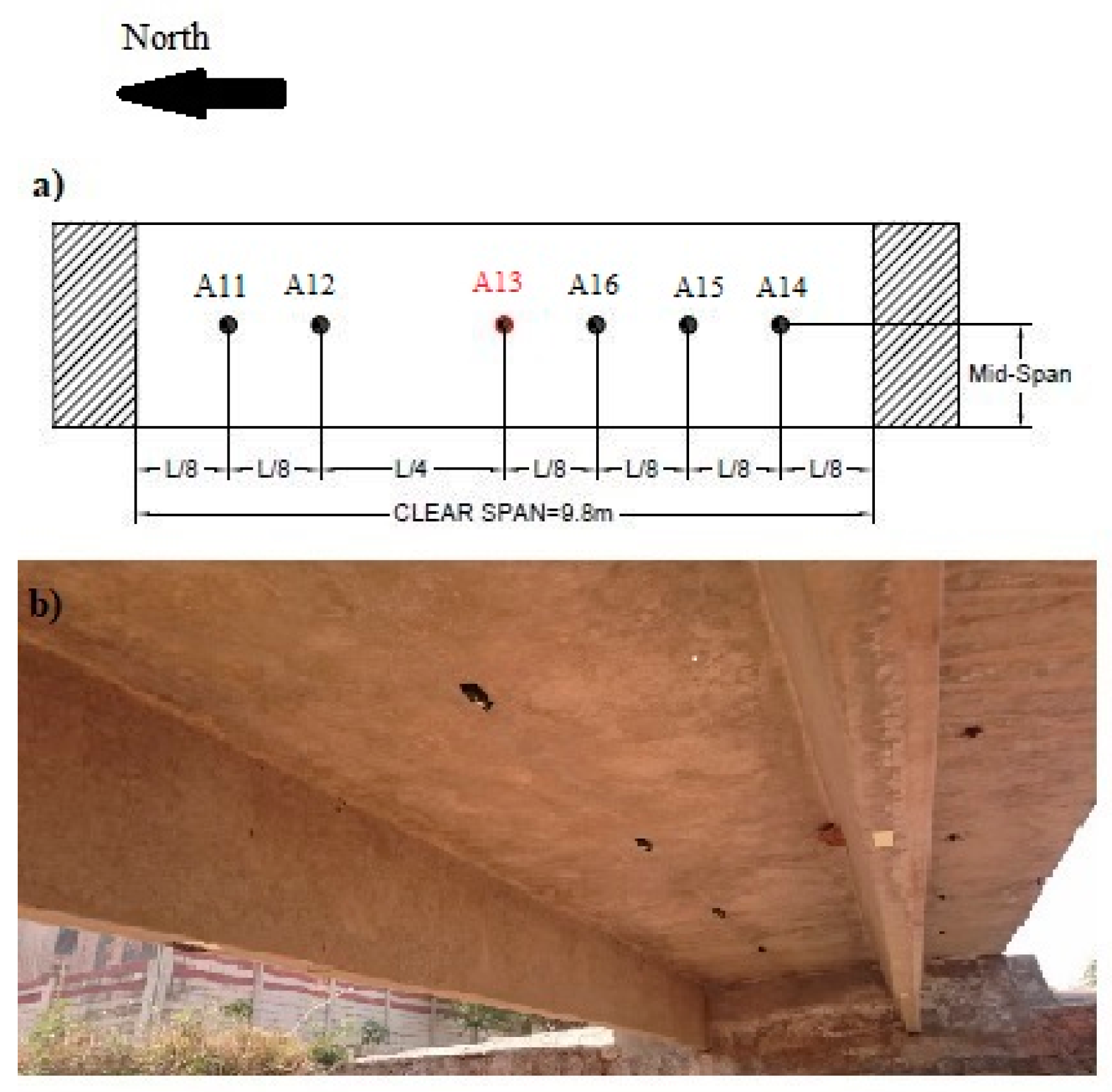
3.2. Instrumentation
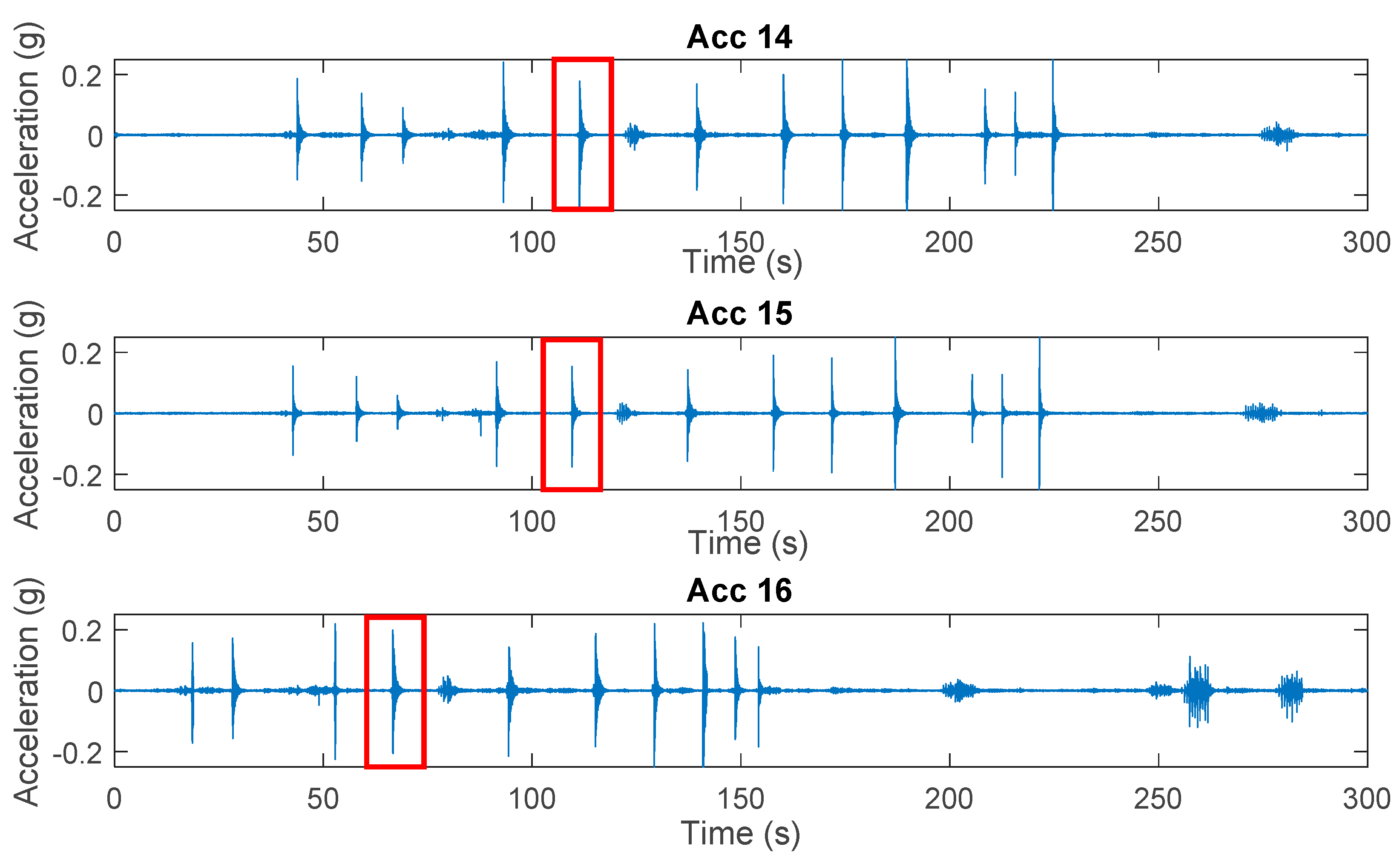
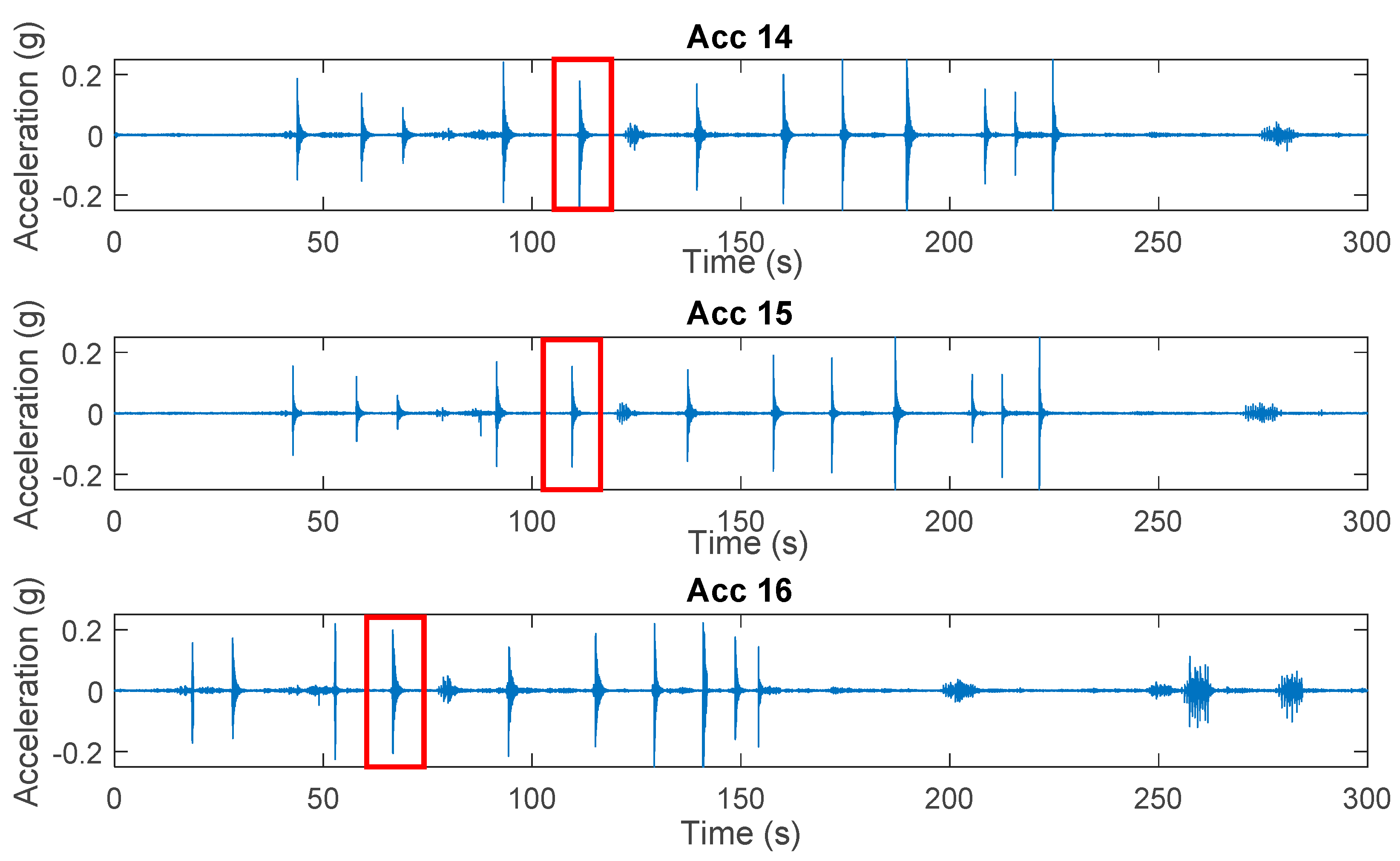
3.3. Testing
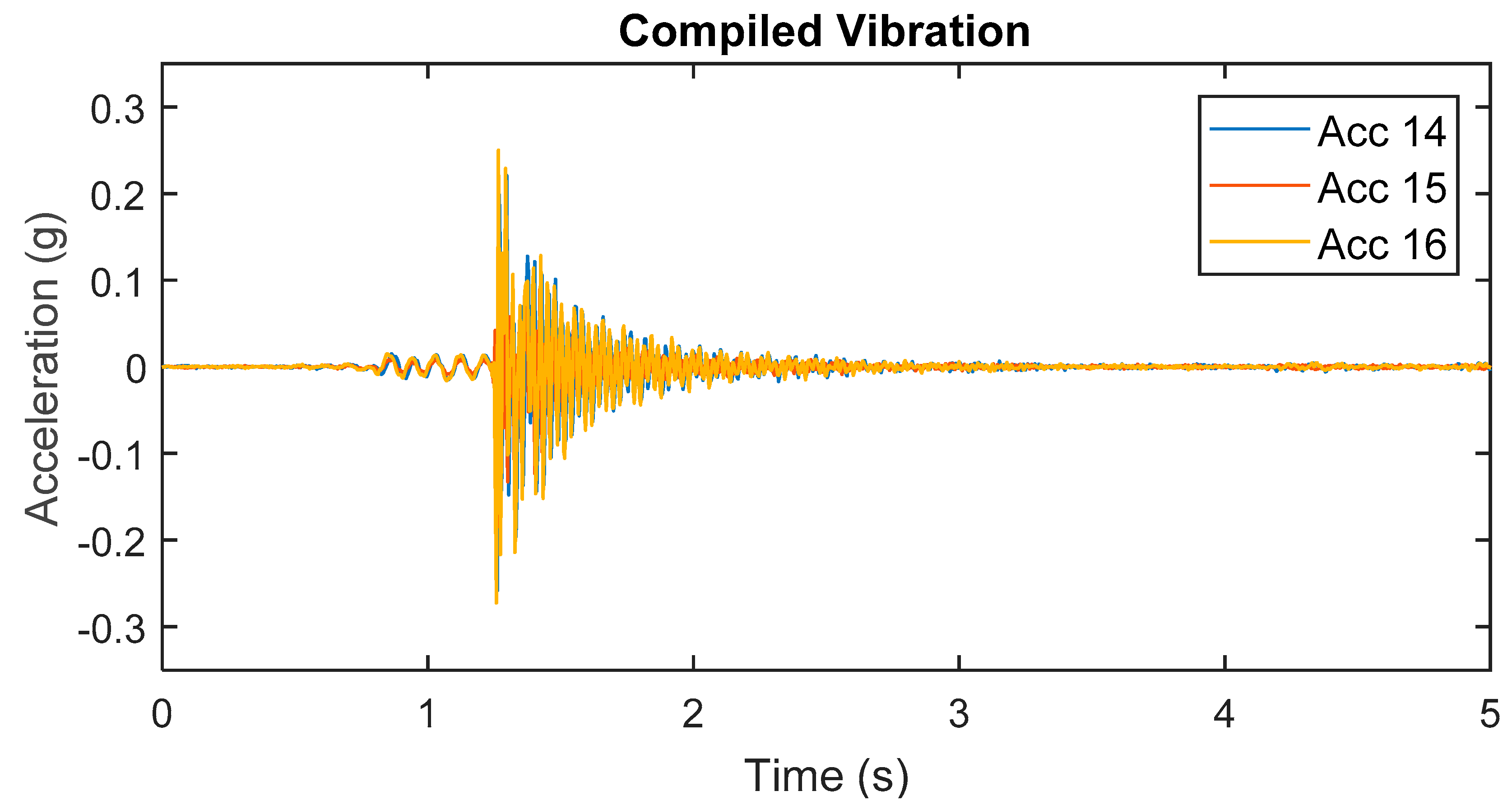
3.4. Data Pre-Processing
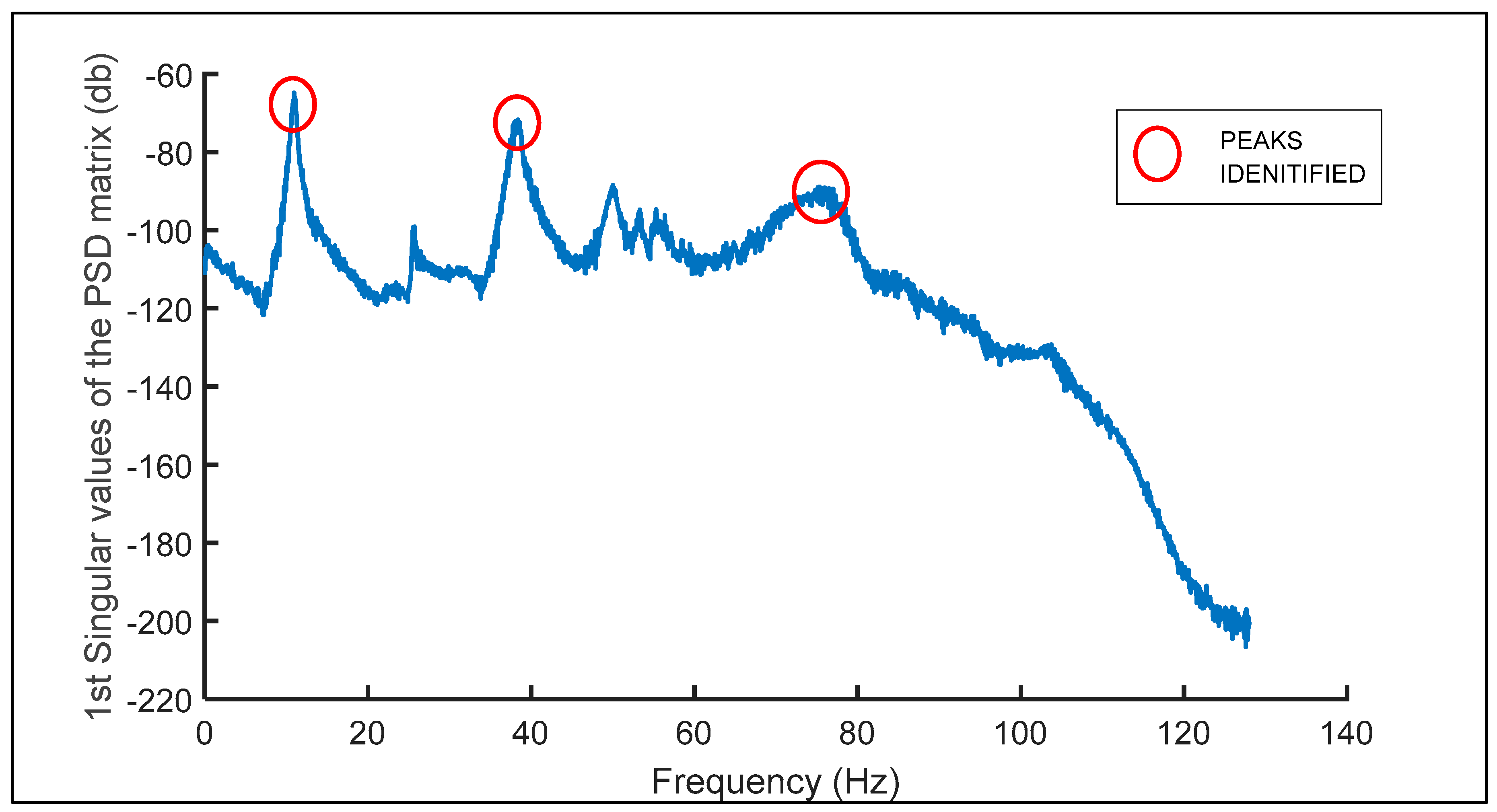
3.5. Frequency Domain Decomposition
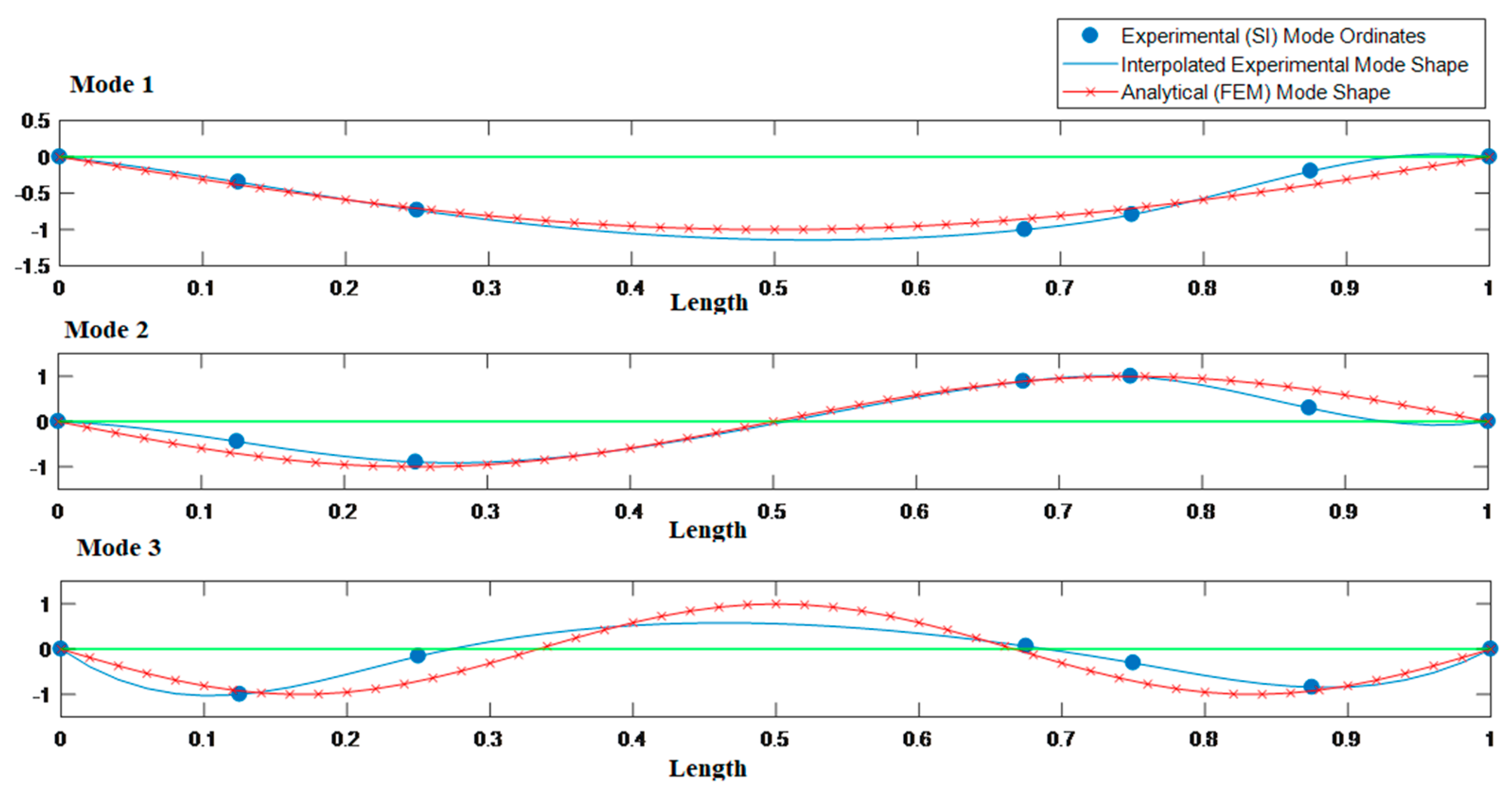
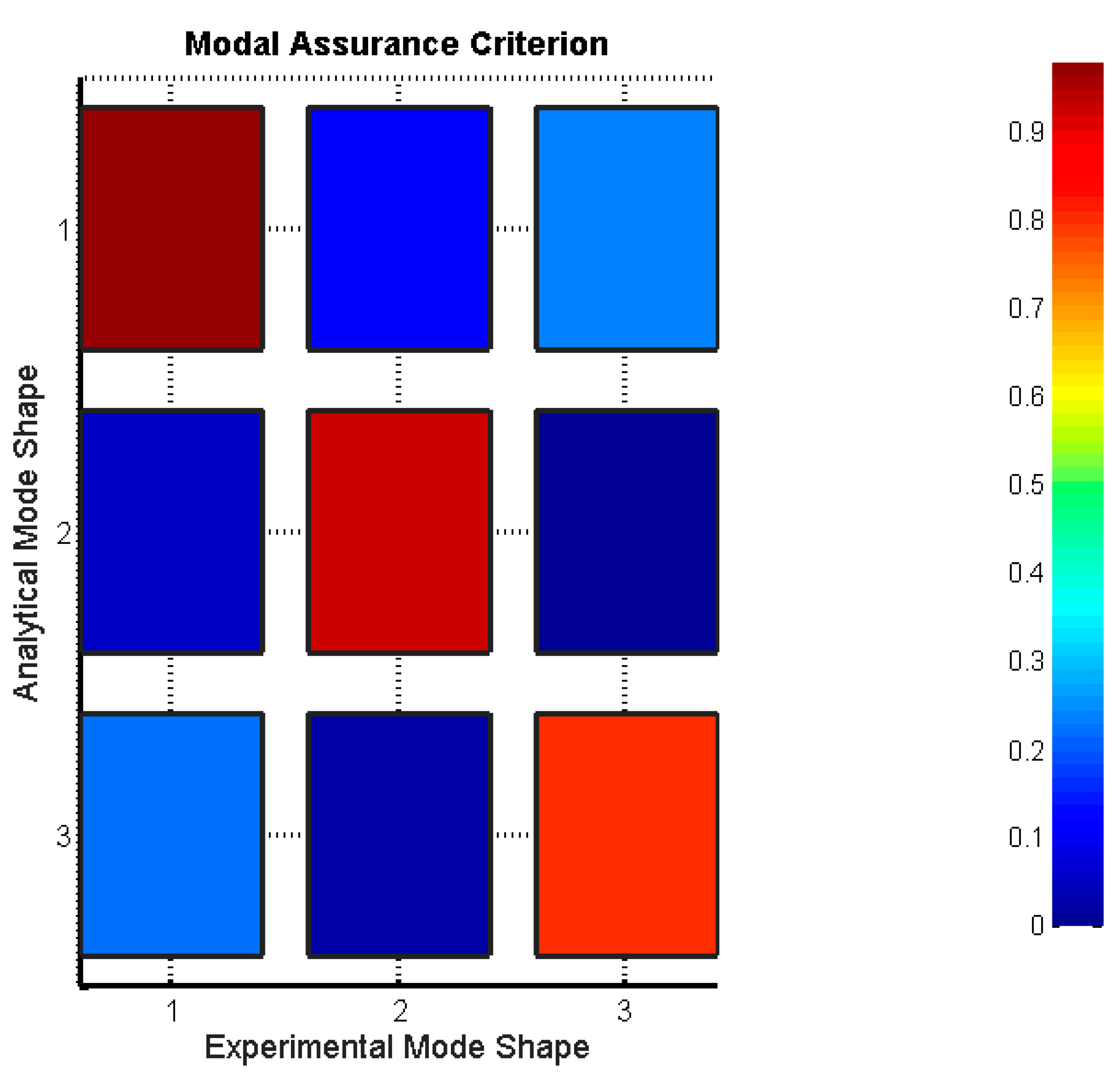
4. Comparison of Finite Element Model and System Identification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pan, H.; Azimi, M.; Gui, G.; Yan, F.; Lin, Z. Vibration-Based Support Vector Machine for Structural Health Monitoring. In International Conference on Experimental Vibration Analysis for Civil Engineering Structures; Springer: Cham, Switzerland, 2018; pp. 167–178. [Google Scholar]
- Rasheed, A.; Farooq, S.H.; Usman, M.; Hanif, A.; Khan, N.A.; Khushnood, R.A. Structural reliability analysis of superstructure of highway bridges on China-Pakistan Economic Corridor (CPEC): A case study. J. Struct. Integr. Maint. 2018, 5314, 197–207. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Phil. Trans. R. Soc. A 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Housner, G.W.; Bergman, L.A.; Caughey, T.K.; Chassiakos, A.G.; Claus, R.O.; Masri, S.F.; Skelton, R.E.; Soong, T.T.; Spencer, B.F.; Yao, J.T.P. Structural control: Past, present, and future. J. Eng. Mech. 1997, 123, 897–971. [Google Scholar] [CrossRef]
- Rytter, A. Vibrational Based Inspection of Civil Engineering Structures. Doctoral Dissertation, Aalborg University, Aalborg, Denmark, 1993. [Google Scholar]
- Seo, J.; Hu, J.W.; Lee, J. Summary Review of Structural Health Monitoring Applications for Highway Bridges. J. Perform. Constr. Facil. 2016, 30, 04015072. [Google Scholar] [CrossRef]
- Worden, K.; Farrar, C.R.; Manson, G.; Park, G. The fundamental axioms of structural health monitoring. Proc. R. Soc. A 2007, 463, 1639–1664. [Google Scholar] [CrossRef] [Green Version]
- Mukhopadhyay, S.; Luş, H.; Betti, R. Probabilistic Structural Health Assessment with Identified Physical Parameters from Incomplete Measurements. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A 2015, 2, B4015003. [Google Scholar] [CrossRef]
- Sirca, G.F.; Adeli, H. System identification in structural engineering. Sci. Iranica 2012, 19, 1355–1364. [Google Scholar] [CrossRef] [Green Version]
- Brownjohn, A.E.; Brownjohn, J.M.W. Structural Identification: Opportunities and Challenges. J. Struct. Eng. 2013, 139, 1639–1647. [Google Scholar] [Green Version]
- Zhou, Y.; Zhang, J.; Yi, W.; Jiang, Y.; Pan, Q. Structural Identification of a Concrete-Filled Steel Tubular Arch Bridge via Ambient Vibration Test Data. J. Bridge Eng. 2017, 22, 04017049. [Google Scholar] [CrossRef]
- Zhang, L.; Brincker, R.; Andersen, P. An Overview of Operational Modal Analysis: Major Development and Issues 1. Major Developments of OMA. In Proceedings of the 1St International Operational Modal Analysis Conference, Copenhagen, Denmark, 26–27 April 2005; p. 12. [Google Scholar]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef] [Green Version]
- Ventura, C.E. Aalborg Universitet Damping Estimation by Frequency Domain Decomposition. In Proceedings of the 19th International Modal Analysis Conference, Orlando, FL, USA, 5–8 February 2001. [Google Scholar]
- Peeters, B.; de Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Azimi, M. Design of Structural Vibration Control Using Smart Materials and Devices for Earthquake-Resistant and Resilient Buildings. Master’s Thesis, North Dakota State University, Fargo, ND, USA, 2017. [Google Scholar]
- Piana, G.; Lofrano, E.; Manuello, A.; Ruta, G. Natural frequencies and buckling of compressed non-symmetric thin-walled beams. Thin Walled Struct. 2017, 111, 189–196. [Google Scholar] [CrossRef]
- Asadollahi, P.; Li, J. Statistical analysis of modal properties of a cable-stayed bridge through long-term structural health monitoring with wireless smart sensor networks. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2016, Las Vegas, NV, USA, 21–24 March 2016; Volume 22, p. 98030G. [Google Scholar]
- Spencer, B.F.; Jo, H.; Mechitov, K.A.; Li, J.; Sim, S.H.; Kim, R.E.; Cho, S.; Linderman, L.E.; Moinzadeh, P.; Giles, R.K.; et al. Recent advances in wireless smart sensors for multi-scale monitoring and control of civil infrastructure. J. Civ. Struct. Health Monit. 2016, 6, 17–41. [Google Scholar] [CrossRef]
- Evans, J.R.; Allen, R.M.; Chung, A.I.; Cochran, E.S.; Guy, R.; Hellweg, M.; Lawrence, J.F. Performance of Several Low-Cost Accelerometers. Seismol. Res. Lett. 2014, 85, 147–158. [Google Scholar] [CrossRef] [Green Version]
- Roberto, F.; Alves, D.E.C. Low-Cost Vibration Sensors: Tendencies and Applications in Condition Monitoring of Machines and Structures. Ph.D. Thesis, Instituto Superior de Engenharia de Lisboa, Lisbon, Portugal, 2015. [Google Scholar]
- Son, J.D.; Ahn, B.H.; Ha, J.M.; Choi, B.K. An availability of MEMS-based accelerometers and current sensors in machinery fault diagnosis. Measurement 2016, 94, 680–691. [Google Scholar] [CrossRef]
- Piana, G.; Lofrano, E.; Manuello, A.; Ruta, G.; Carpinteri, A. Compressive buckling for symmetric TWB with non-zero warping stiffness. Eng. Struct. 2017, 135, 246–258. [Google Scholar] [CrossRef]
- Piana, G.; Lofrano, E.; Carpinteri, A.; Paolone, A. Experimental modal analysis of straight and curved slender beams by piezoelectric transducers. Meccanica 2016, 51, 2797–2811. [Google Scholar] [CrossRef]
- Usman, M.; Hanif, A.; Kim, I.; Jung, H. Experimental validation of a novel piezoelectric energy harvesting system employing wake galloping phenomenon for a broad wind spectrum. Energy 2018, 153, 882–889. [Google Scholar] [CrossRef]
- Pachón, P.; Castro, R.; García-Macías, E.; Compan, V.; Puertas, E.E. Torroja’s bridge: Tailored experimental setup for SHM of a historical bridge with a reduced number of sensors. Eng. Struct. 2018, 162, 11–21. [Google Scholar] [CrossRef]
- Pan, H.; Azimi, M.; Yan, F.; Lin, Z.; Asce, M. Time-Frequency-Based Data-Driven Structural Diagnosis and Damage Detection for Cable-Stayed Bridges. J. Bridge Eng. 2018, 23, 1–22. [Google Scholar] [CrossRef]
- Morassi, A.; Tonon, S. Dynamic Testing for Structural Identification of a Bridge. J. Bridge Eng. 2008, 13, 573–585. [Google Scholar] [CrossRef]
- Na. 2015. Available online: http://www.gcdataconcepts.com/x2-1.html (accessed on 1 November 2018).
- Brincker, R. Some Elements of Operational Modal Analysis. Shock Vib. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Perez-Ramirez, C.A.; Amezquita-Sanchez, J.P.; Adeli, H.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.D.J.; Dominguez-Gonzalez, A.; Osornio-Rios, R.A. Time-frequency techniques for modal parameters identification of civil structures from acquired dynamic signals. J. Vibroeng. 2016, 18, 3164–3185. [Google Scholar]
- Bjorklund, S.; Ljung, L. A review of time-delay estimation techniques. In Proceedings of the 42nd IEEE International Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 2502–2507. [Google Scholar]
- Magalhães, F.; Cunha, Á. Explaining operational modal analysis with data from an arch bridge. Mech. Syst. Signal Process. 2011, 25, 1431–1450. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.W.; Omenzetter, P.; Beskhyroun, S. Operational modal analysis of an eleven-span concrete bridge subjected to weak ambient excitations. Eng. Struct. 2017, 151, 839–860. [Google Scholar] [CrossRef]
- Allemang, R.J. The modal assurance criterion—Twenty years of use and abuse. Sound Vib. 2003, 37, 14–21. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concrete Properties | |
|---|---|
| Density | 2500 () |
| Poisson Ratio | 0.15 |
| Modulus of Elasticity | 30 GPa |
| Shear Modulus | 13.4 GPa |
| Experimental (SI) | Analytical (FEM) | Absolute Difference (%) | |
|---|---|---|---|
| 1st Mode | 10.94 Hz | 9.858 Hz | 10.98 % |
| 2nd Mode | 38.34 Hz | 38.857 Hz | 1.33 % |
| 3rd Mode | 75.31 Hz | 85.422 Hz | 11.84 % |
| Experimental Mode | ||||
|---|---|---|---|---|
| Analytical Mode | 1st | 2nd | 3rd | |
| 1st | 0.979 | 0.114 | 0.241 | |
| 2nd | 0.054 | 0.923 | 0.000 | |
| 3rd | 0.216 | 0.019 | 0.807 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, A.; Sandhu, T.Y.; Usman, M. Ambient Vibration Testing of a Pedestrian Bridge Using Low-Cost Accelerometers for SHM Applications. Smart Cities 2019, 2, 20-30. https://doi.org/10.3390/smartcities2010002
Ali A, Sandhu TY, Usman M. Ambient Vibration Testing of a Pedestrian Bridge Using Low-Cost Accelerometers for SHM Applications. Smart Cities. 2019; 2(1):20-30. https://doi.org/10.3390/smartcities2010002
Chicago/Turabian StyleAli, Azam, Talha Yousaf Sandhu, and Muhammad Usman. 2019. "Ambient Vibration Testing of a Pedestrian Bridge Using Low-Cost Accelerometers for SHM Applications" Smart Cities 2, no. 1: 20-30. https://doi.org/10.3390/smartcities2010002
APA StyleAli, A., Sandhu, T. Y., & Usman, M. (2019). Ambient Vibration Testing of a Pedestrian Bridge Using Low-Cost Accelerometers for SHM Applications. Smart Cities, 2(1), 20-30. https://doi.org/10.3390/smartcities2010002