Integrating Soil Compaction Impacts of Tramlines Into Soil Erosion Modelling: A Field-Scale Approach


Abstract
:1. Introduction
2. Materials and Methods
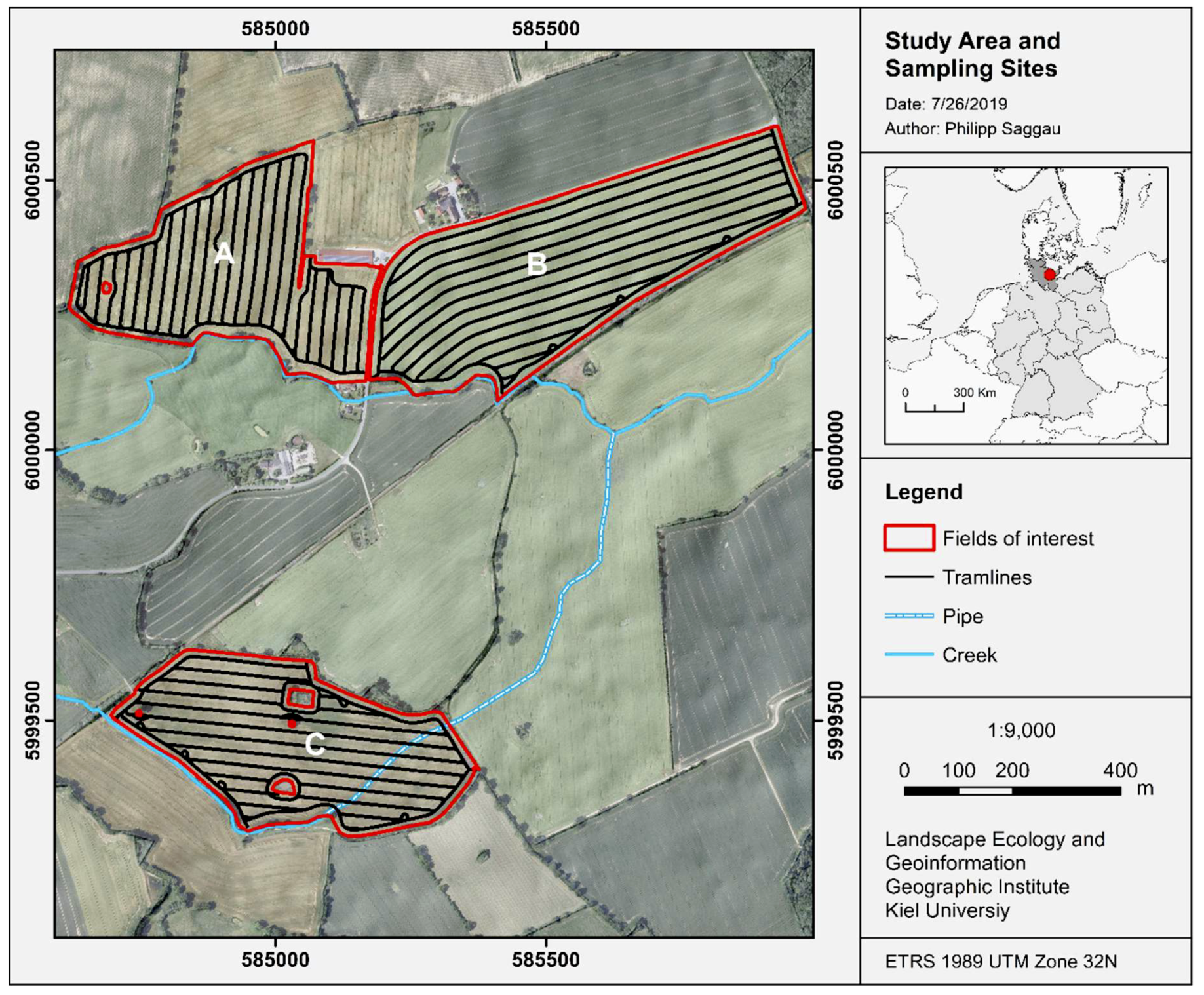
2.1. Study Area
2.2. Model Description of EROSION 3D
2.3. Scenario Design
2.4. Model Parameterization
2.4.1. Topography and Precipitation
2.4.2. Soil Information
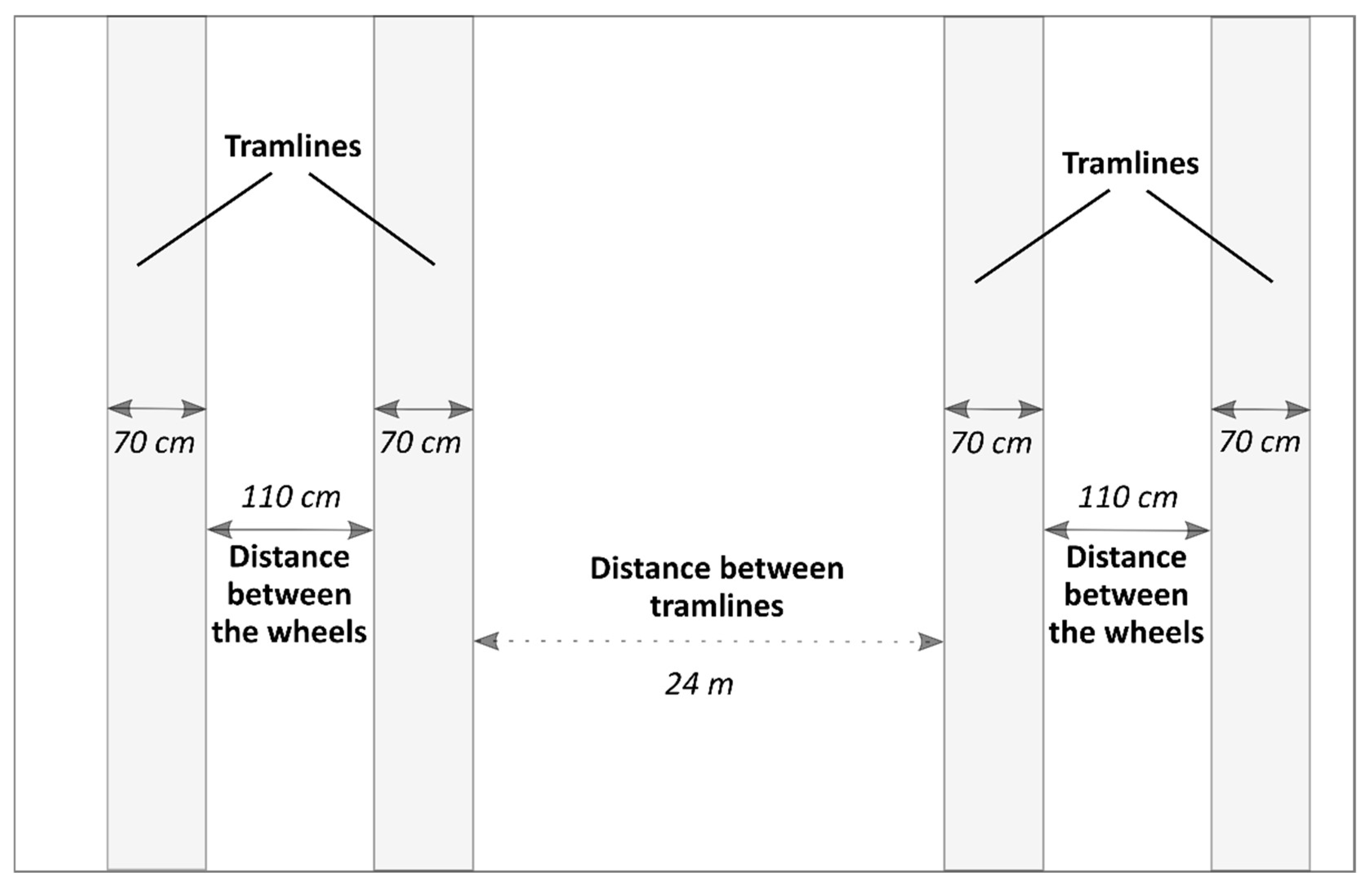
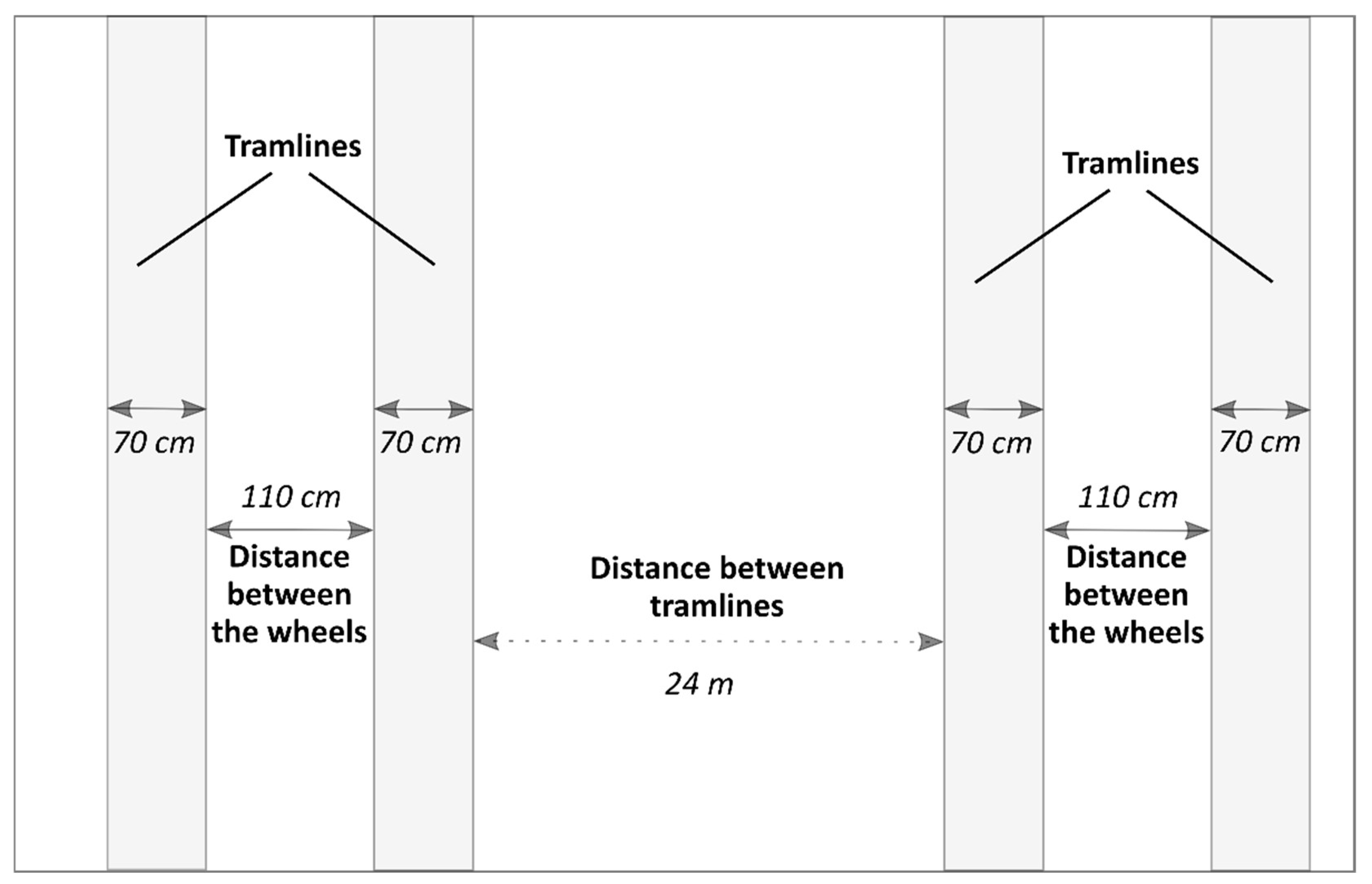
2.4.3. Tramlines
2.4.4. Field Mapping
3. Results
3.1. Modelling Results
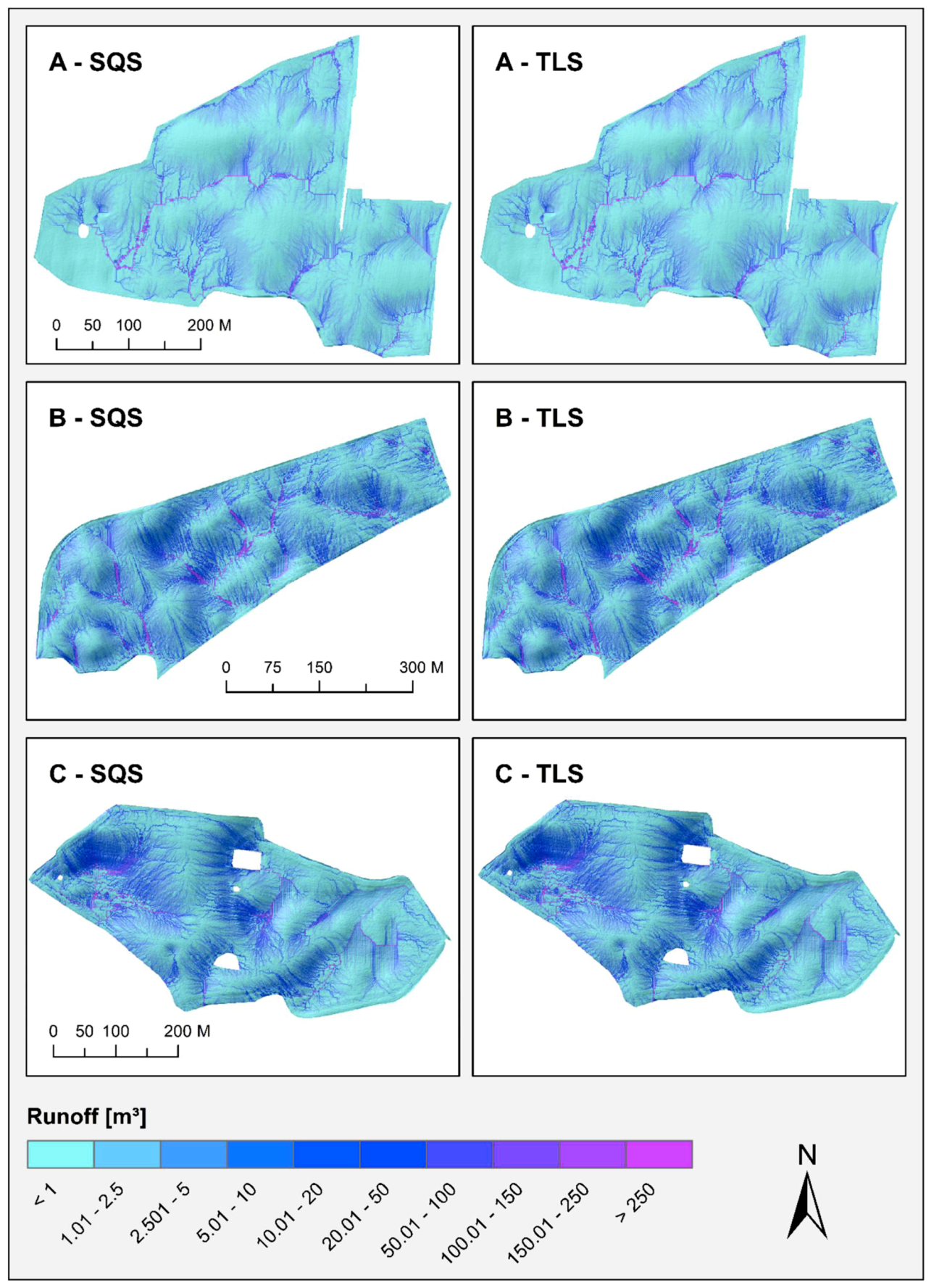
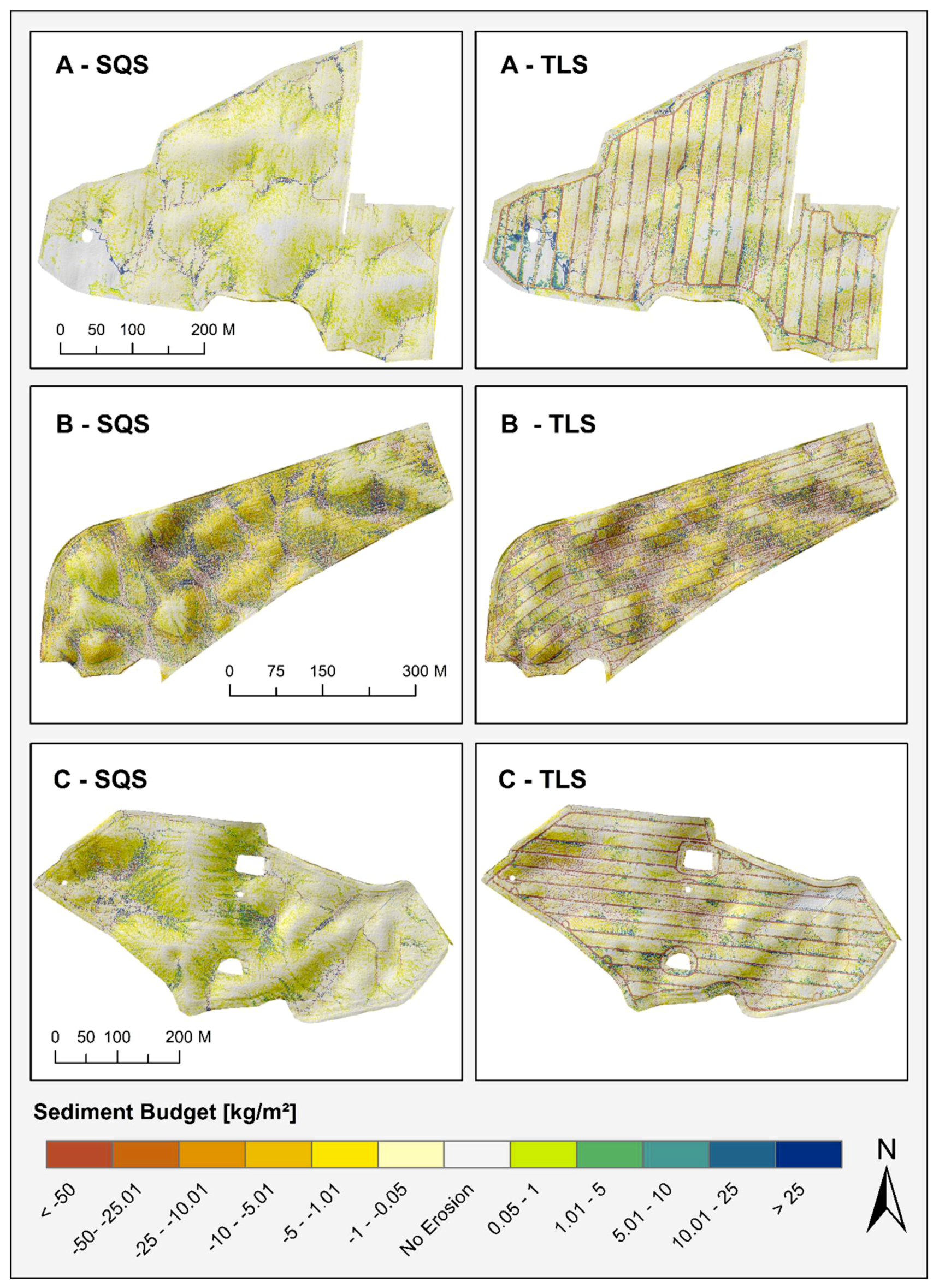
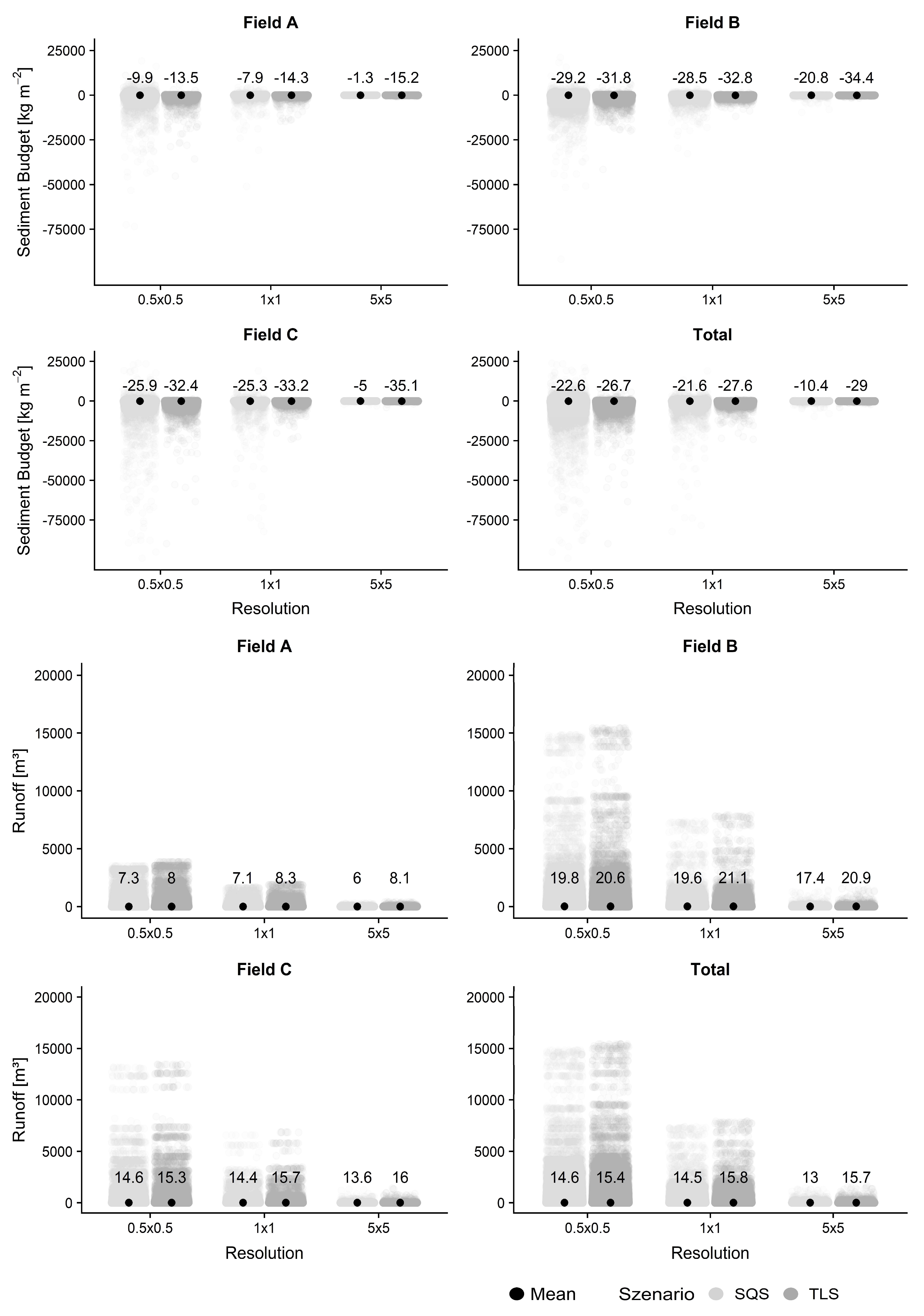
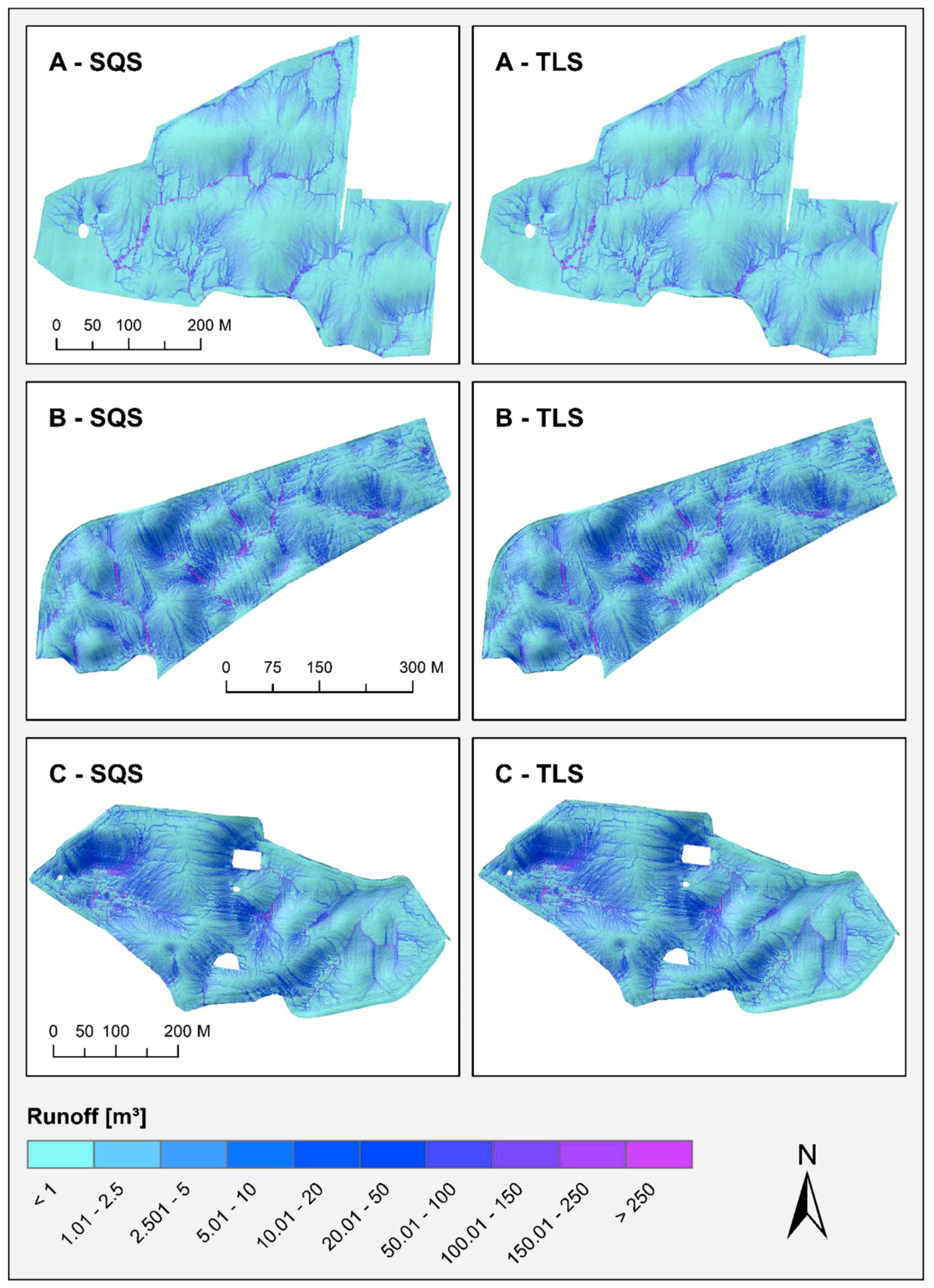
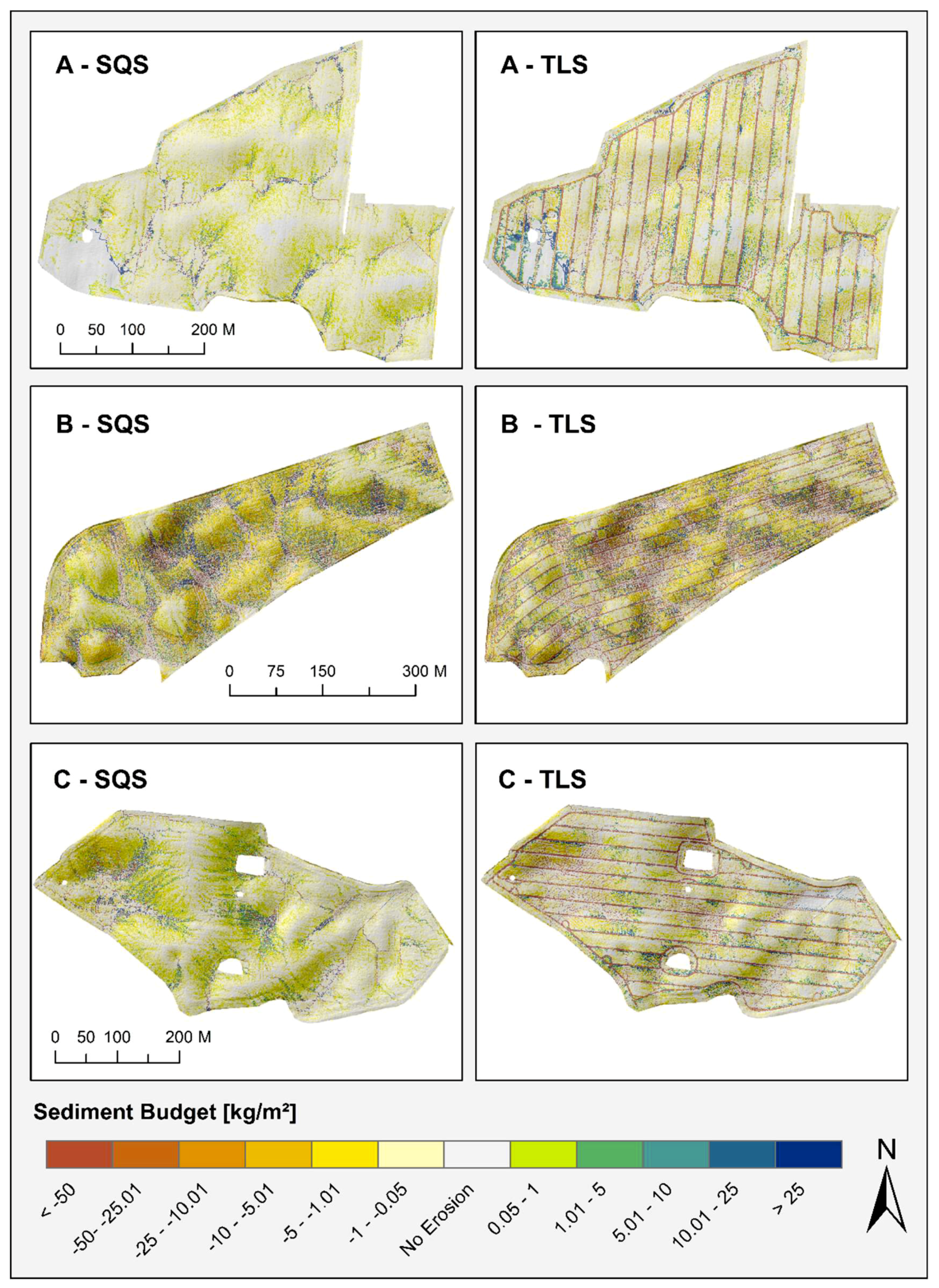
3.1.1. Status-Quo-Scenario (SQS)
3.1.2. Tramline-Scenario (TLS)
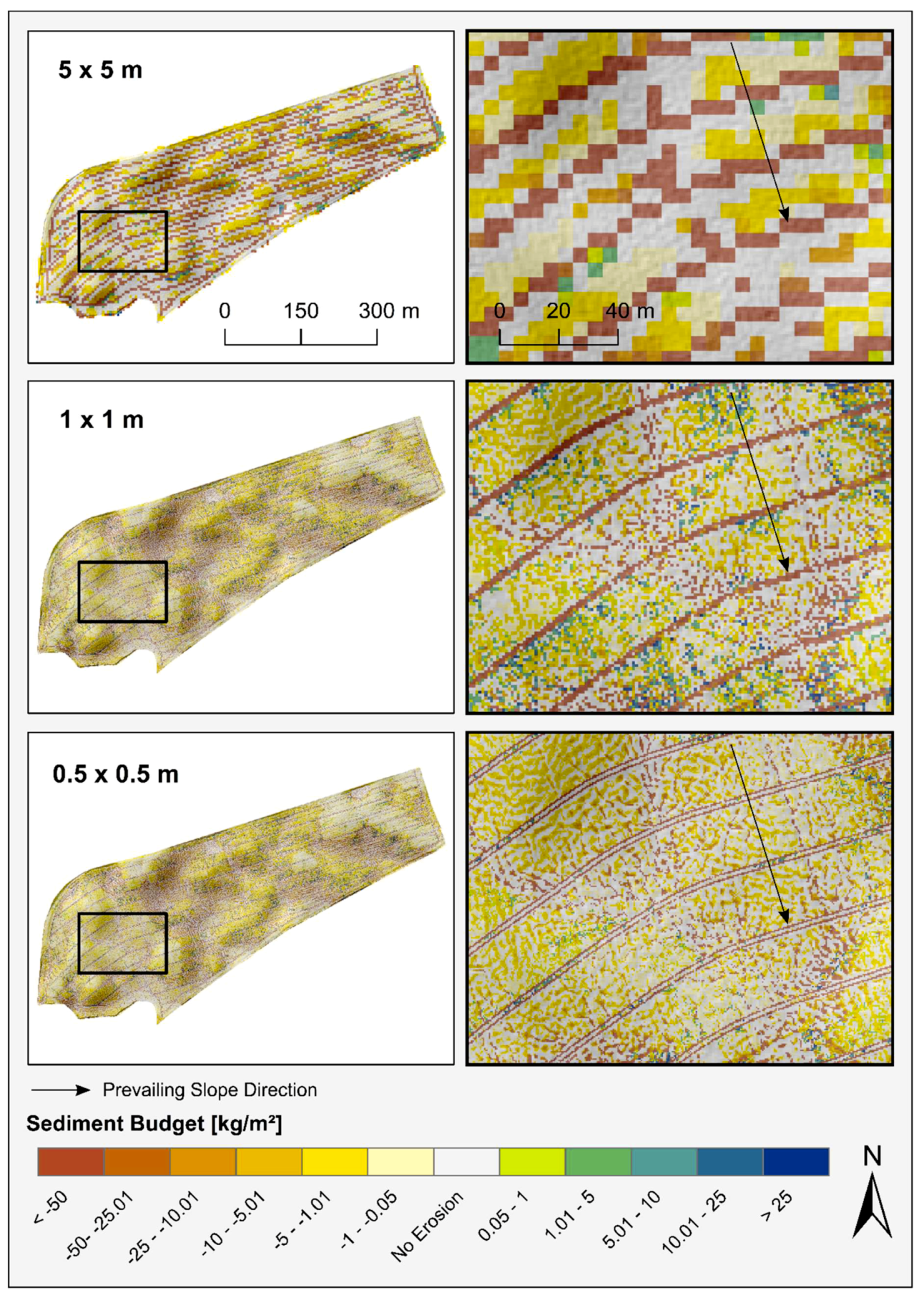
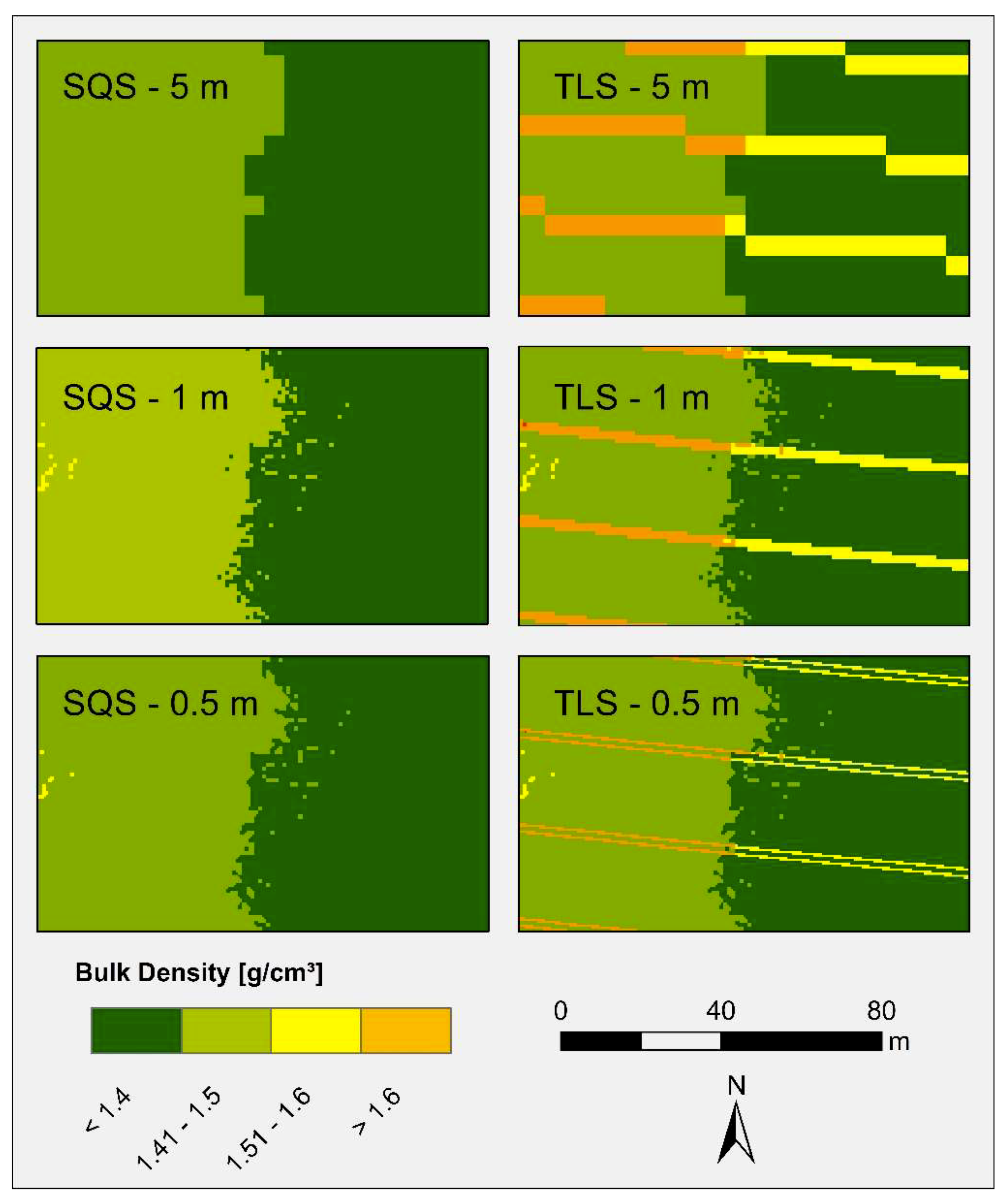
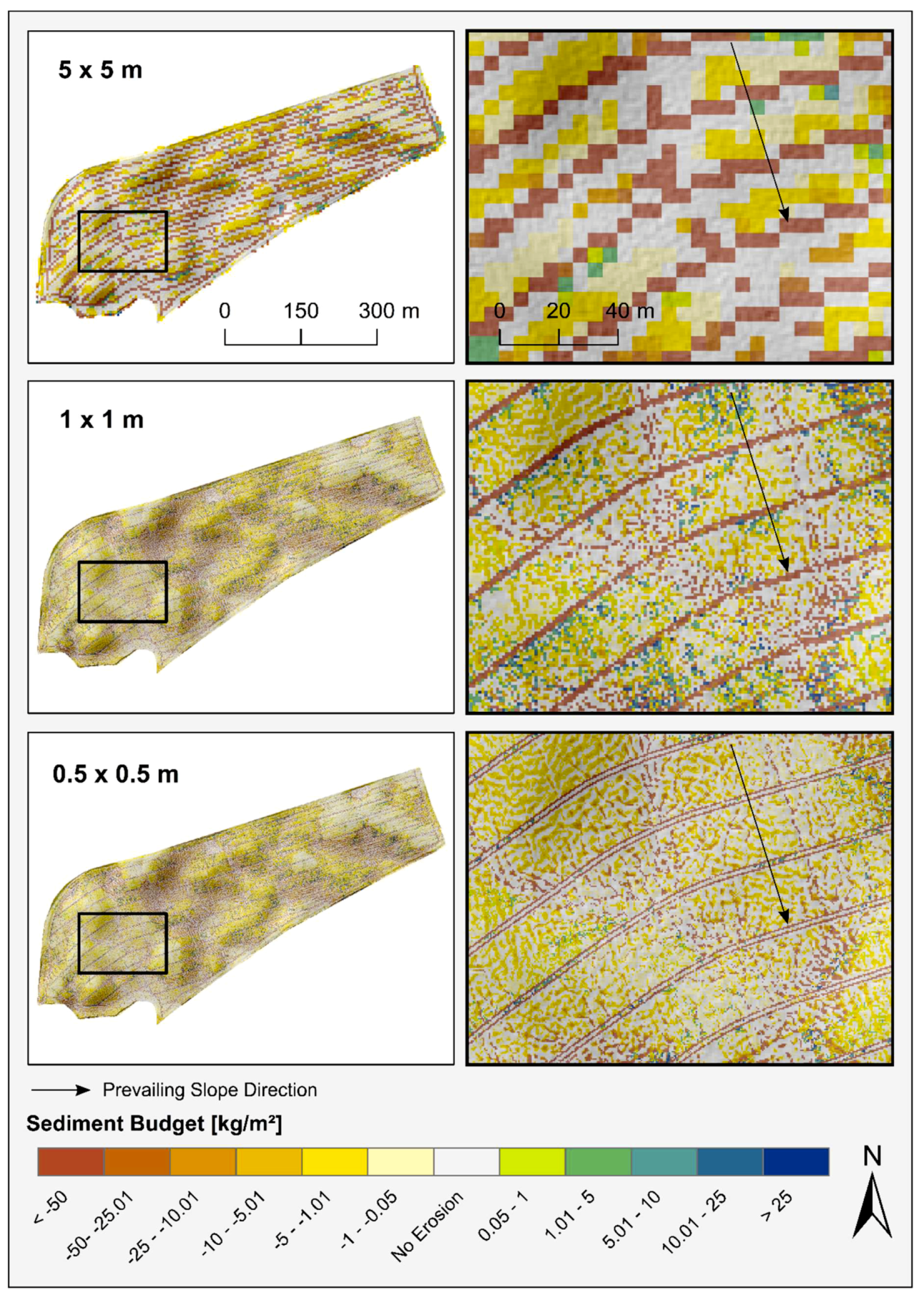
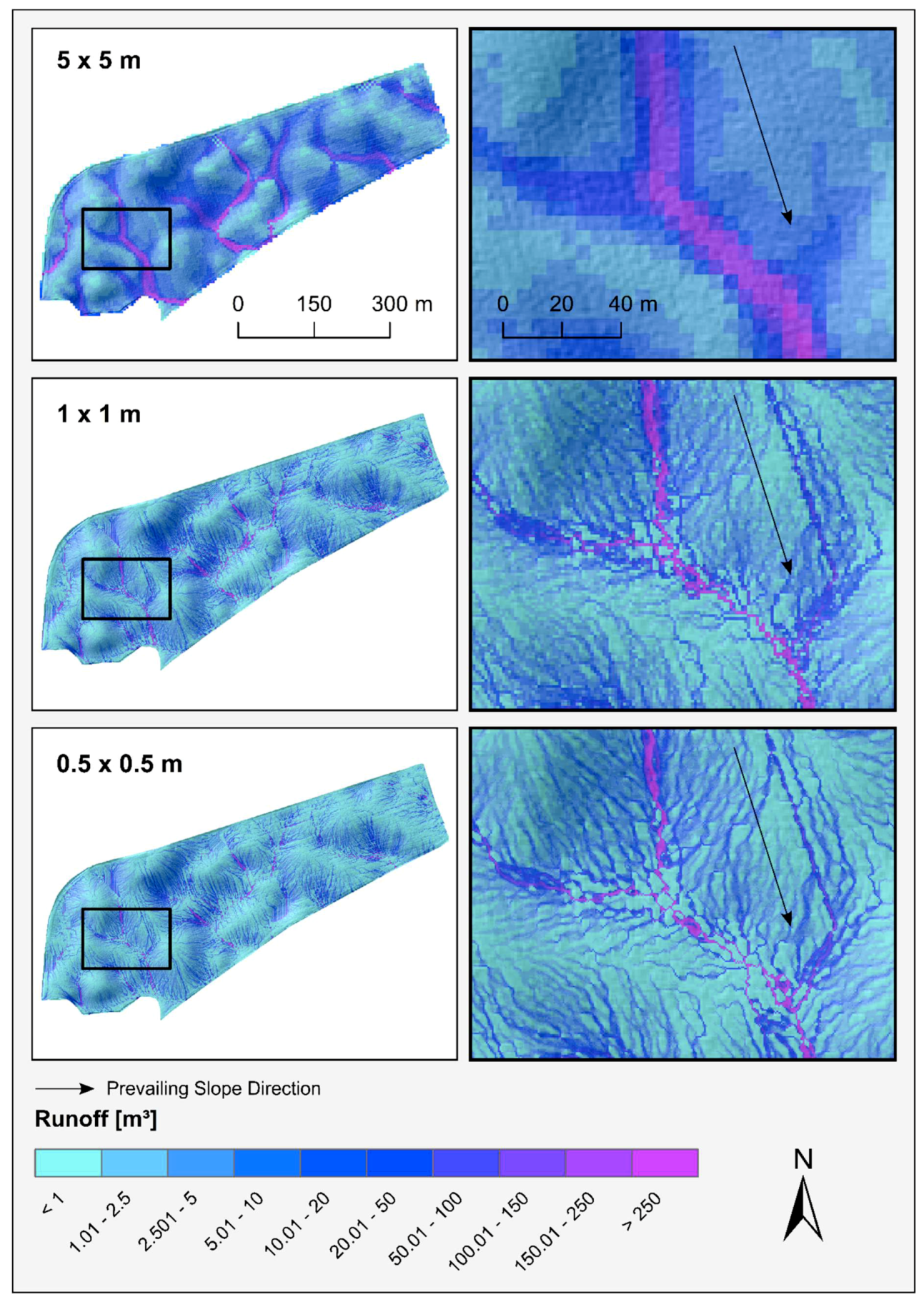
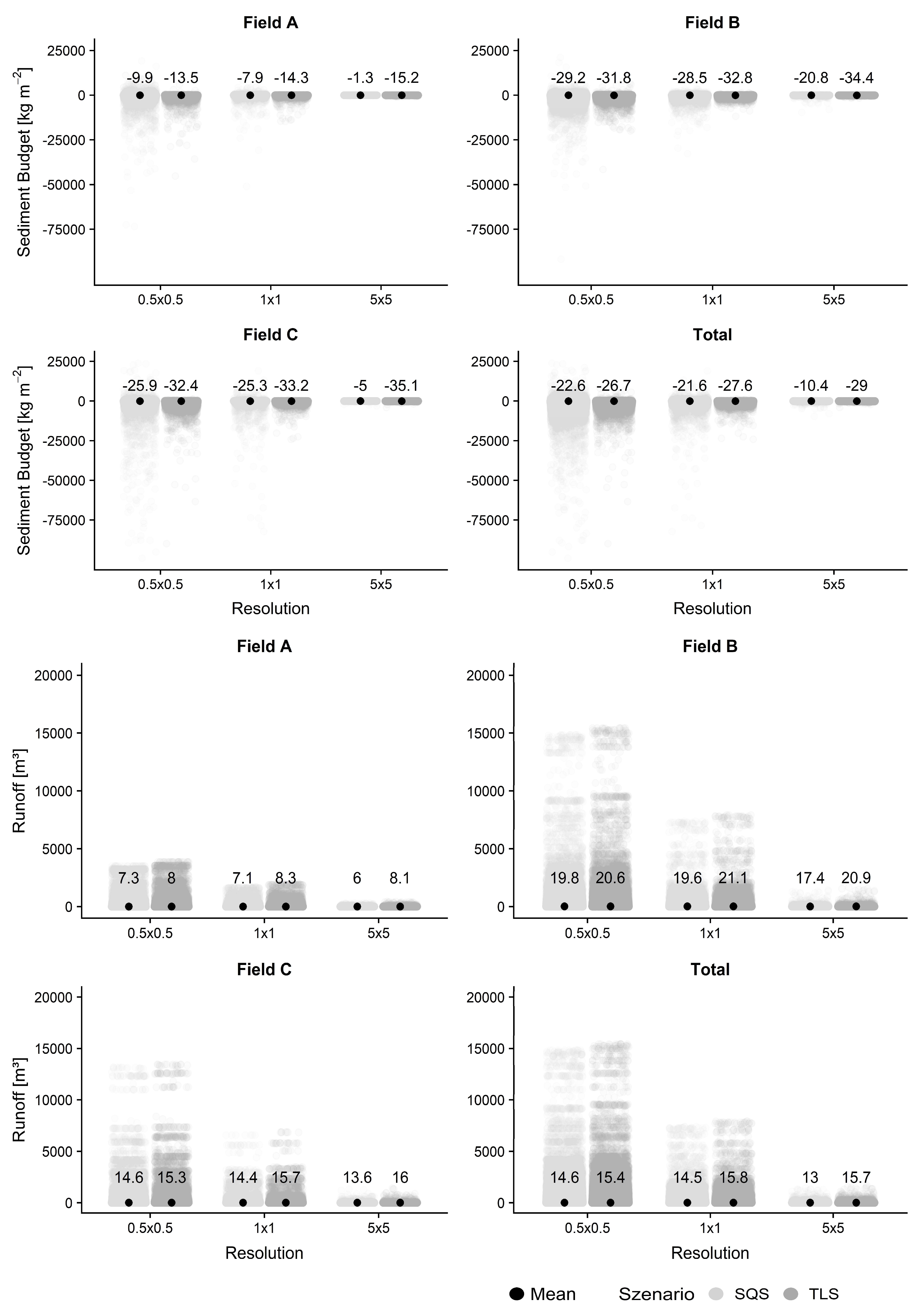
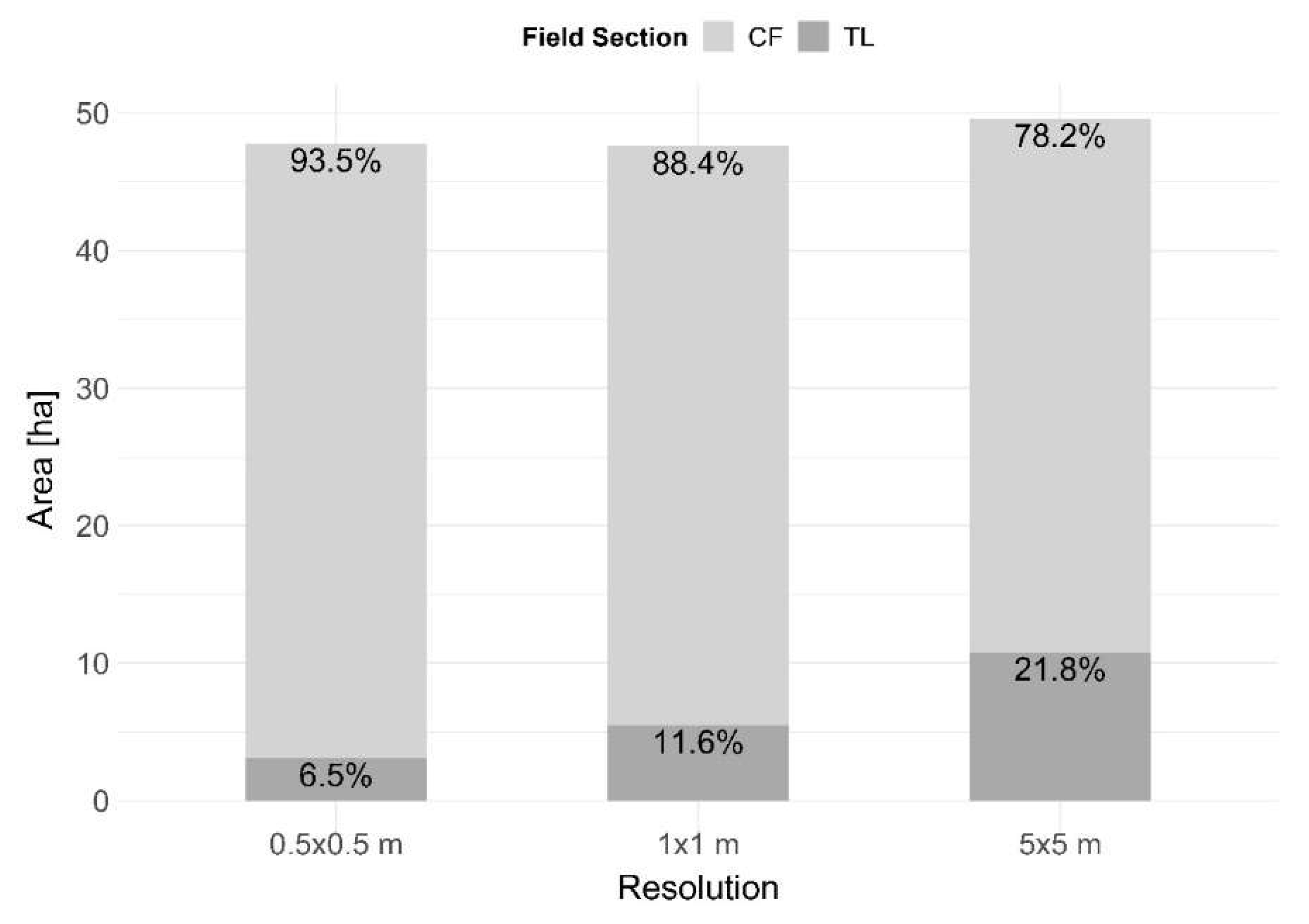
3.1.3. Resolution
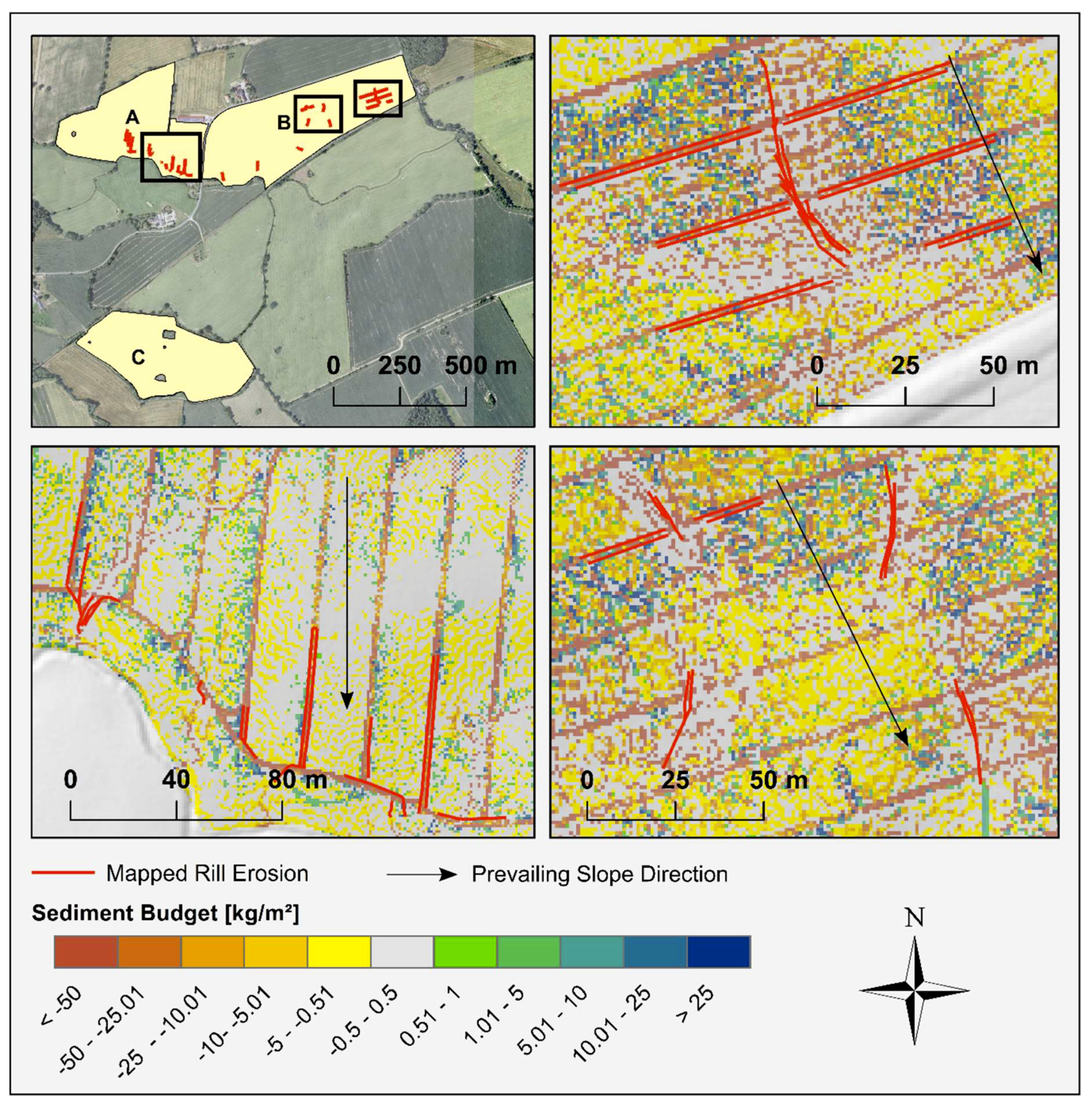
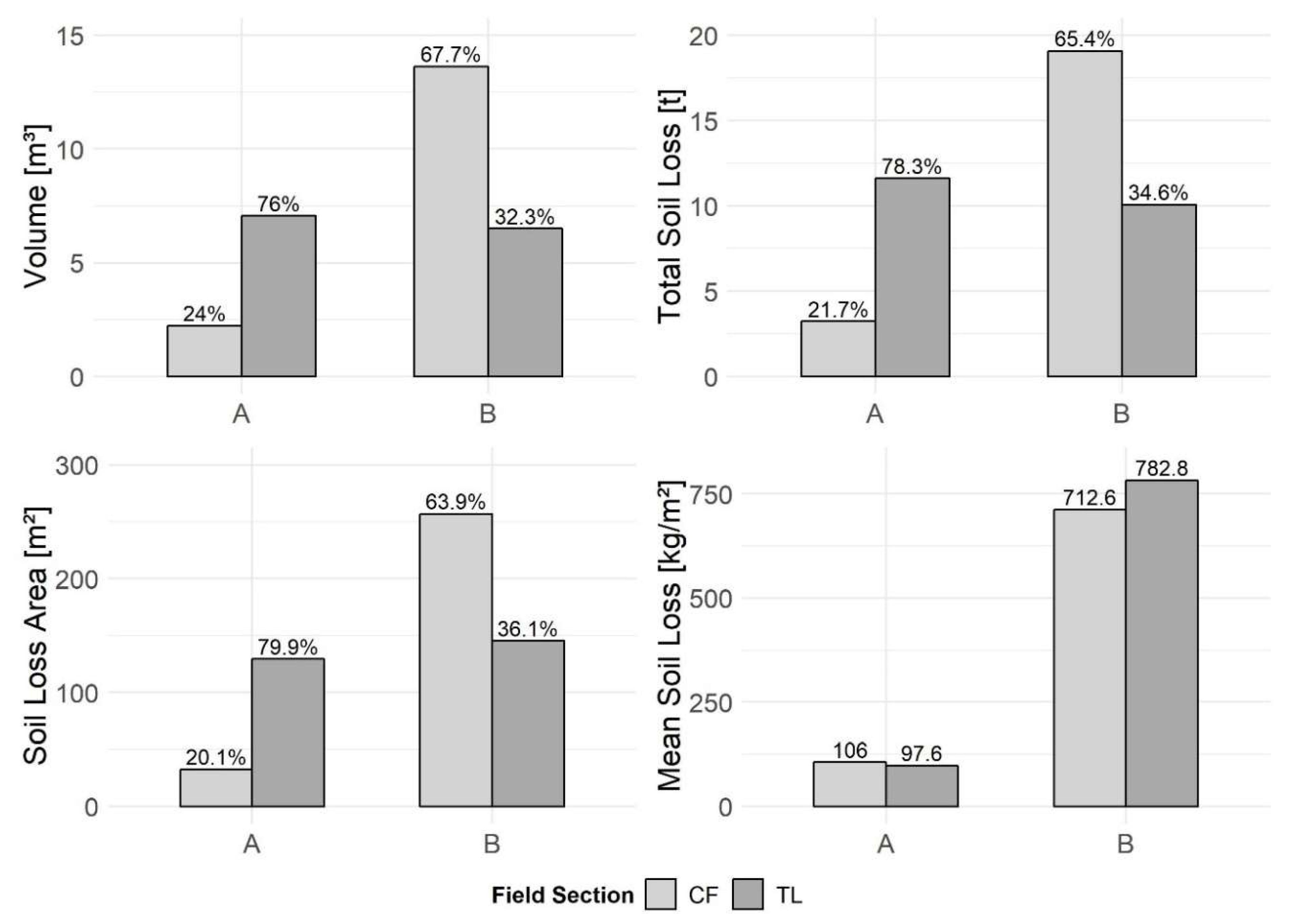
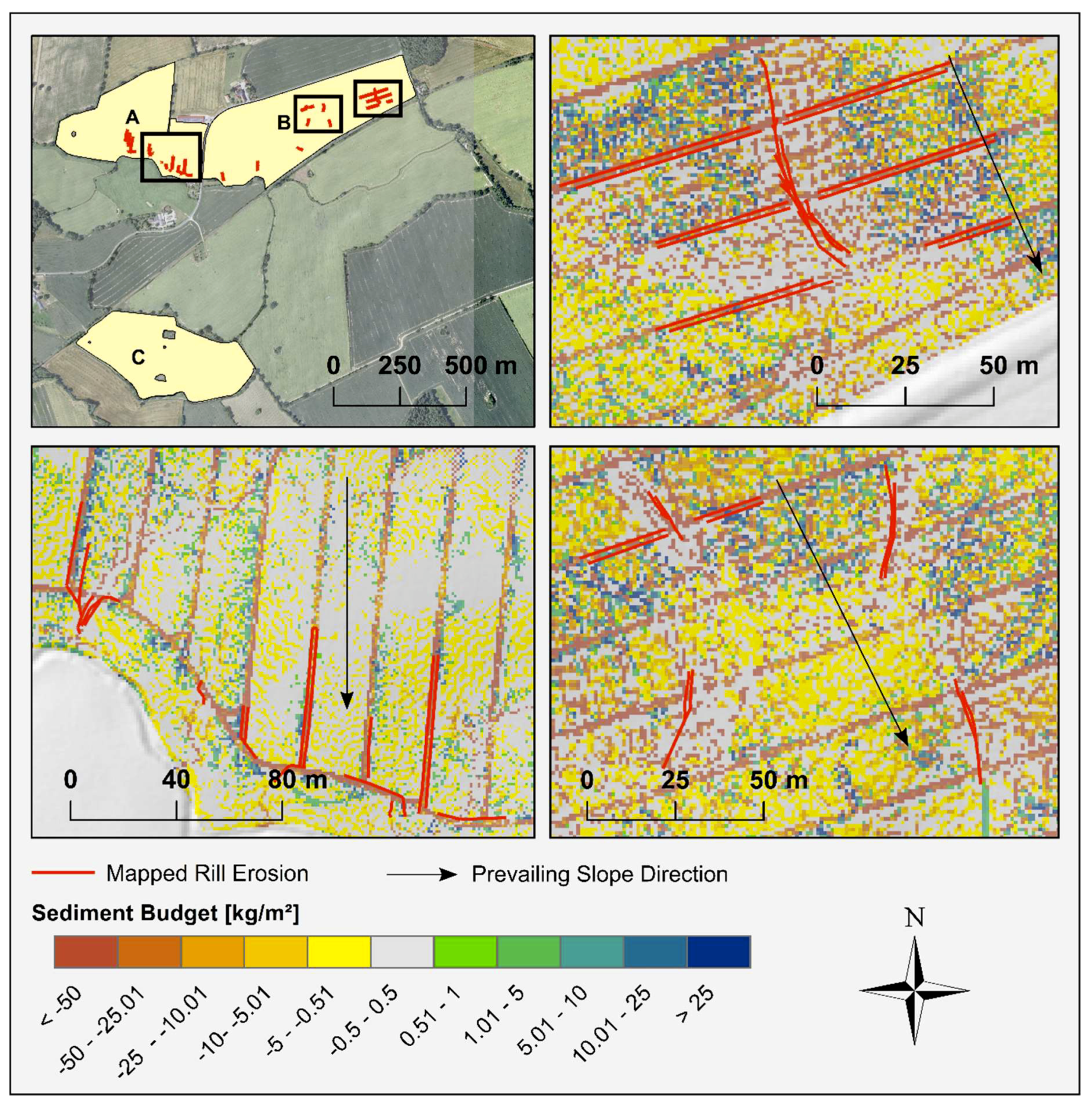
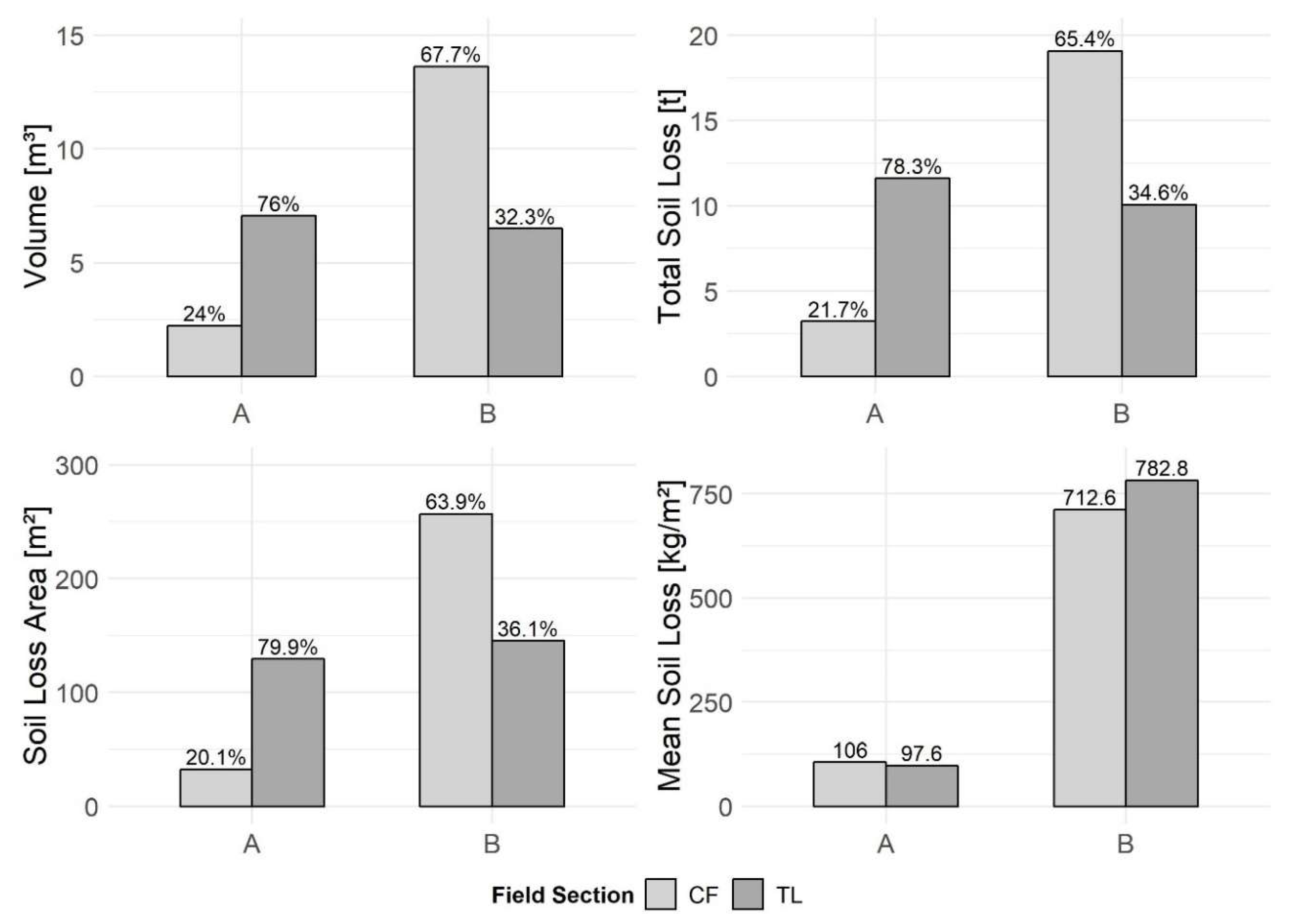
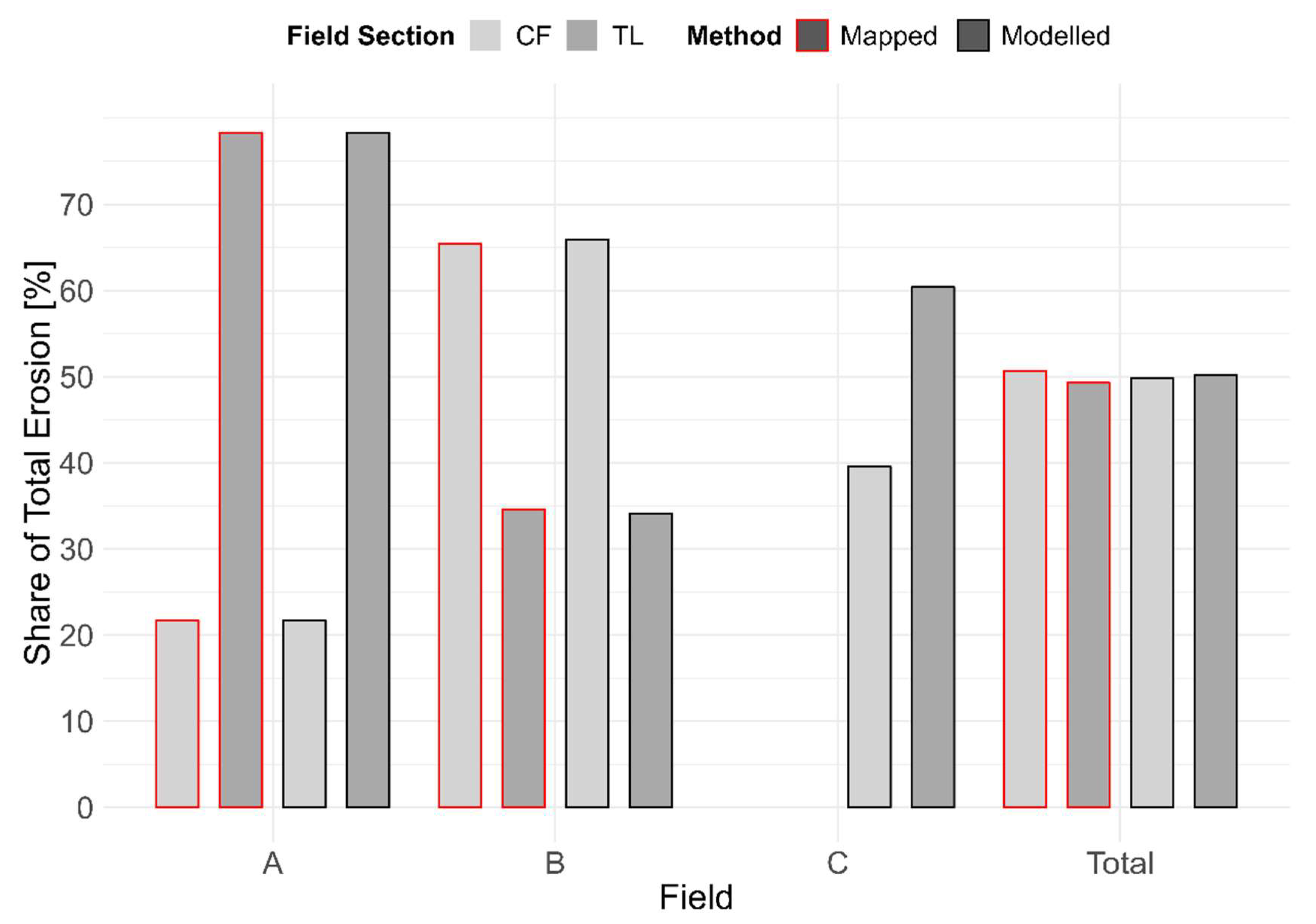
3.1.4. Mapped Soil Erosion
4. Discussion
4.1. Effects of Tramlines on Runoff and Sediment Budget
4.2. Model Performance
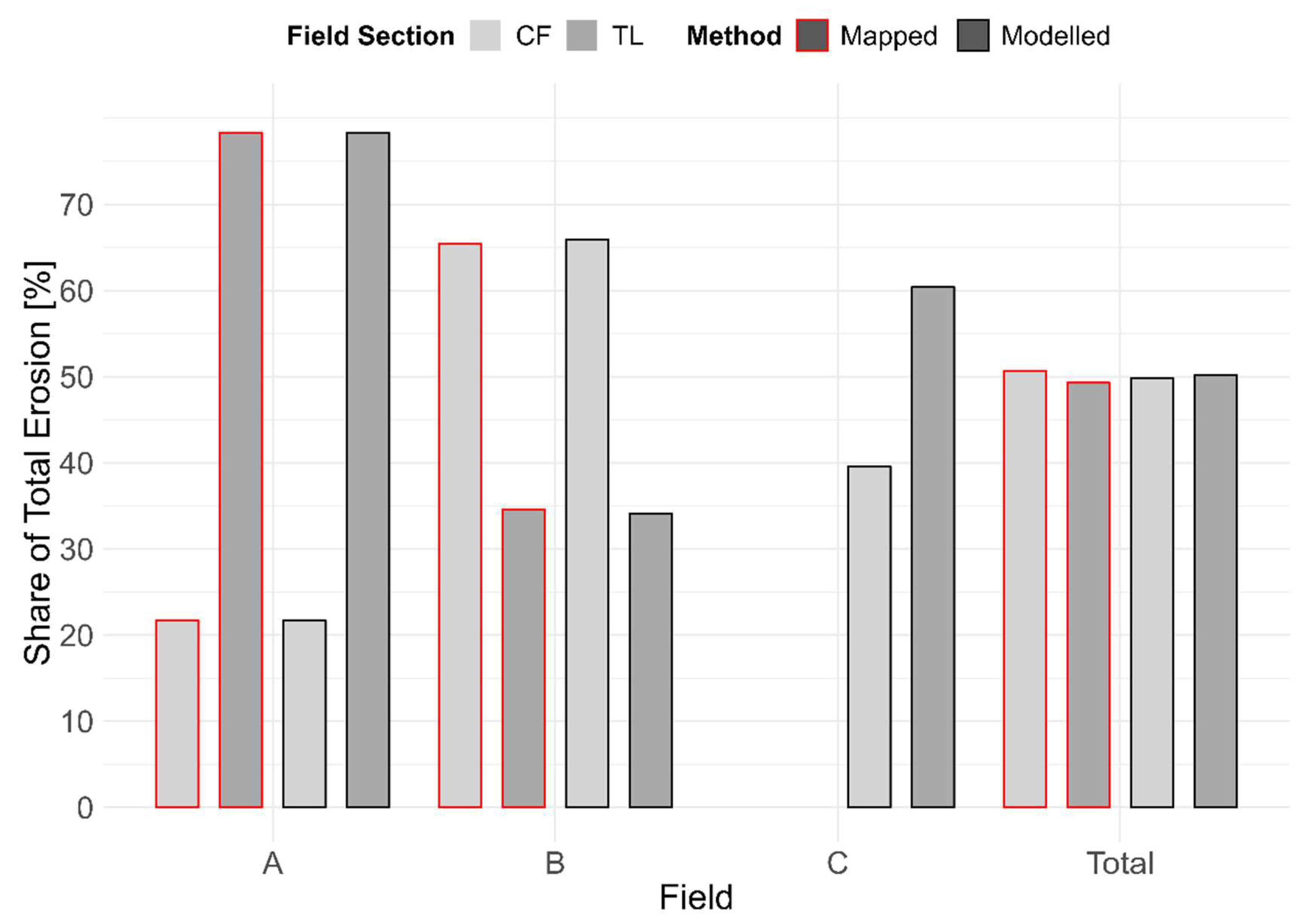
4.2.1. Modelled vs. Mapped Soil Erosion
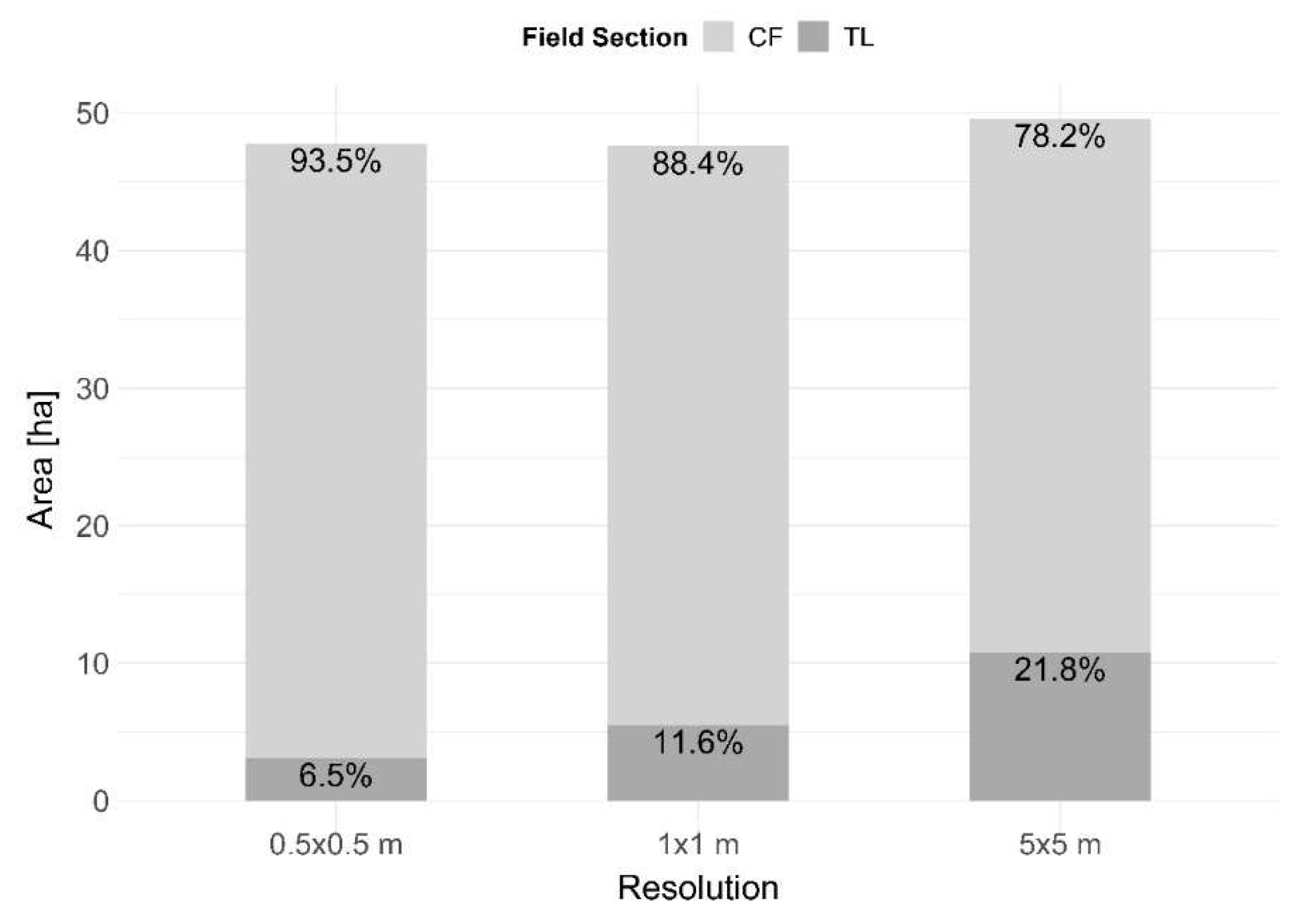
4.2.2. Effects of Cell Size
4.3. Future Work in Soil Erosion Modelling
5. Conclusions
- Grid−based erosion models like E3D are able to integrate tramlines.
- The share of measured soil loss between tramlines and cultivated areas is well accounted for on grid sizes ≤1 m.
- The integration of tramlines showed a high dependency to the angle of slope. Therfore, the increase in estimated soil loss was higher for fields where tramlines were in the direction of the major slope, as confirmed by mapped soil erosion.
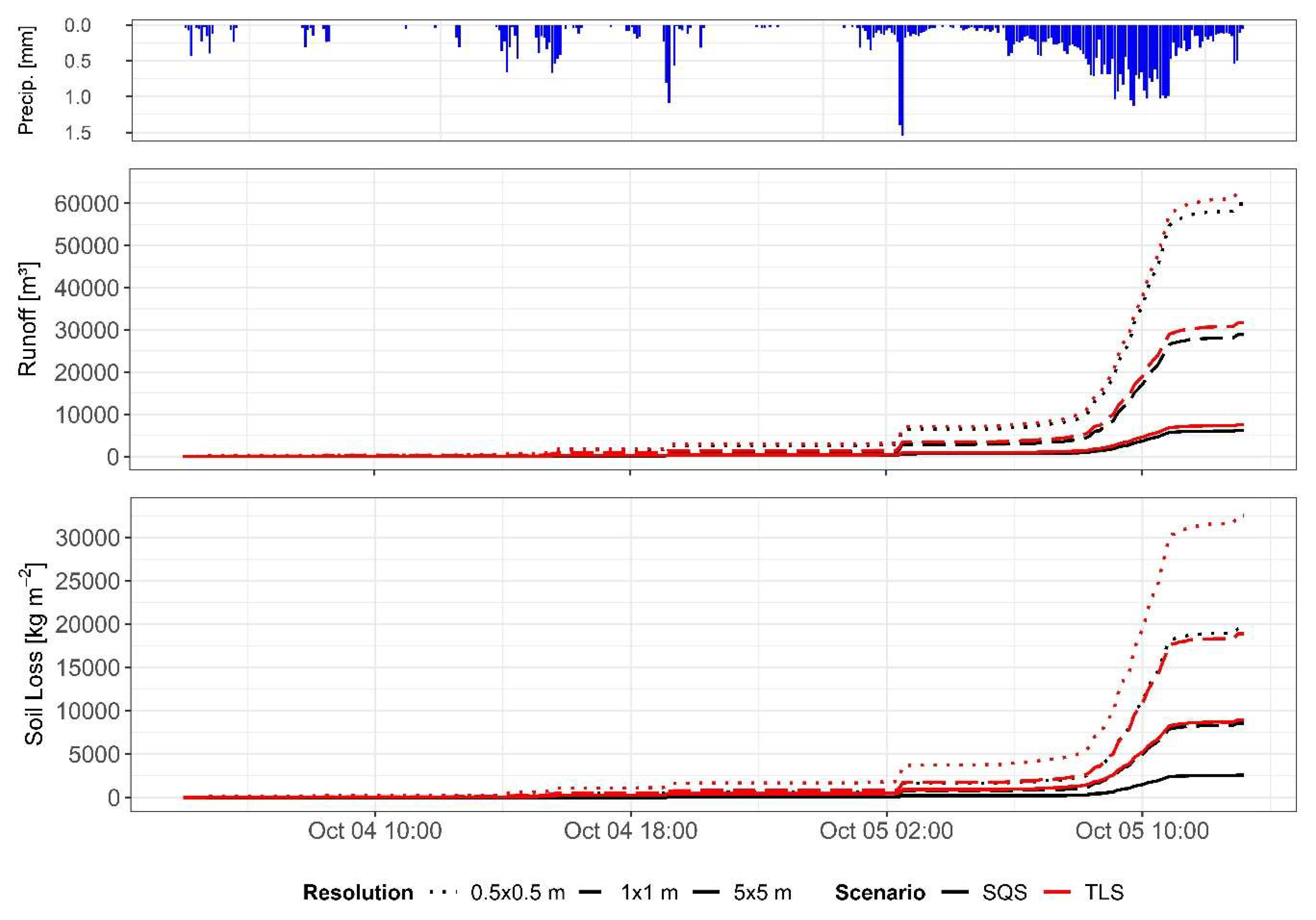
- The soil loss and runoff were initiated quicker and increased stronger within tramlines.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Min. Slope (%) | Max. Slope (%) | Mean Slope (%) | Area (ha) | Mulch Cover (%) | Stone Cover (%) | Vegetation Cover (%) |
|---|---|---|---|---|---|---|---|
| A | 0 | 18.5 | 5.3 | 13.8 | 1 | 2 | 5 |
| B | 0 | 20.6 | 5.8 | 19.6 | 1 | 6 | 12.2 |
| C | 0 | 16.2 | 4.6 | 14.2 | 21 | 5.5 | 0 |
| Field | Field Section | Soil Texture | Crop Type | Management | Surface Roughness (s m−1/3) | Soil Erodibility (N m−2) | Bulk Density (kg m−3) | Soil Cover (%) |
|---|---|---|---|---|---|---|---|---|
| A | CF | Sl3 | Winter Wheat | chisel plough | 0.035 | 0.0030 | 1370.0 | 8.0 |
| Sl4 | Winter Wheat | chisel plough | 0.035 | 0.0030 | 1370.0 | 8.0 | ||
| Ls3 | Winter Wheat | chisel plough | 0.035 | 0.0070 | 1370.0 | 8.0 | ||
| TL | Sl3 | Winter Wheat | chisel plough | 0.008 | 0.0001 | 1575.5 | 2.0 | |
| Sl4 | Winter Wheat | chisel plough | 0.008 | 0.0001 | 1575.5 | 2.0 | ||
| Ls3 | Winter Wheat | chisel plough | 0.008 | 0.0001 | 1575.5 | 2.0 | ||
| B | CF | Sl2 | Winter Barely | mouldboard plough | 0.013 | 0.0006 | 1330.0 | 19.2 |
| Sl3 | Winter Barely | mouldboard plough | 0.013 | 0.0006 | 1330.0 | 19.2 | ||
| Sl4 | Winter Barely | mouldboard plough | 0.013 | 0.0006 | 1330.0 | 19.2 | ||
| Ls2 | Winter Barely | mouldboard plough | 0.013 | 0.0038 | 1330.0 | 19.2 | ||
| Ls3 | Winter Barely | mouldboard plough | 0.013 | 0.0038 | 1330.0 | 19.2 | ||
| TL | Sl2 | Winter Barely | mouldboard plough | 0.008 | 0.0001 | 1529.5 | 6.0 | |
| Sl3 | Winter Barely | mouldboard plough | 0.008 | 0.0001 | 1529.5 | 6.0 | ||
| Sl4 | Winter Barely | mouldboard plough | 0.008 | 0.0001 | 1529.5 | 6.0 | ||
| Ls2 | Winter Barely | mouldboard plough | 0.008 | 0.0001 | 1529.5 | 6.0 | ||
| Ls3 | Winter Barely | mouldboard plough | 0.008 | 0.0001 | 1529.5 | 6.0 | ||
| C | CF | Lu | stubble follow | chisel plough | 0.035 | 0.0035 | 1540.0 | 26.5 |
| Lt2 | stubble follow | chisel plough | 0.035 | 0.0025 | 1450.0 | 26.5 | ||
| Sl4 | stubble follow | chisel plough | 0.035 | 0.0030 | 1370.0 | 26.5 | ||
| Ls2 | stubble follow | chisel plough | 0.035 | 0.0035 | 1370.0 | 26.5 | ||
| Ls3 | stubble follow | chisel plough | 0.035 | 0.0030 | 1370.0 | 26.5 | ||
| TL | Lu | stubble follow | chisel plough | 0.008 | 0.0001 | 1633.0 | 5.5 | |
| Lt2 | stubble follow | chisel plough | 0.008 | 0.0001 | 1667.5 | 5.5 | ||
| Sl4 | stubble follow | chisel plough | 0.008 | 0.0001 | 1575.5 | 5.5 | ||
| Ls2 | stubble follow | chisel plough | 0.008 | 0.0001 | 1575.5 | 5.5 | ||
| Ls3 | stubble follow | chisel plough | 0.008 | 0.0001 | 1575.5 | 5.5 |
References
- Boardman, J.; Poesen, J. Soil erosion in Europe: Major processes, causes and consequences. In Soil Erosion in Europe; Boardman, J., Poesen, J., Eds.; John Wiley & Sons: Chichester, UK, 2006. [Google Scholar]
- Borrelli, P.; Paustian, K.; Panagos, P.; Jones, A.; Schütt, B.; Lugato, E. Effect of good agricultural and environmental conditions on erosion and soil organic carbon balance: A national case study. Land Use Policy 2016, 50, 408–421. [Google Scholar] [CrossRef]
- Poesen, J. Soil erosion in the anthropocene: Research needs. Earth Surf. Process. Landf. 2018, 43, 64–84. [Google Scholar] [CrossRef]
- Lal, R. Soil erosion and the global carbon budget. Environ. Int. 2003, 29, 437–450. [Google Scholar] [CrossRef]
- Evans, R. Soil Erosion and its Impacts in England and Wales; Friends of the Earth Trust: London, UK, 1996. [Google Scholar]
- CABI. Introduction to Soil Erosion and Sediment Redistribution in River Catchments: Measurement, Modelling and Management in the 21st Century; Owens, P.N., Collins, A.J., Eds.; CABI: Wallingford, UK; Cambridge, MA, USA, 2006; ISBN 978 0 85199 050 7. [Google Scholar]
- Pimental, D.; Harvey, C.; Resosudarmo, P.; Sinclair, K.; Kurz, D.; McNair, M.; Crist, S.; Shpritz, L.; Fitton, L.; Saffouri, R.; et al. Environmental and economic costs of soil erosion and conservation benefits. Science 1995, 267, 1117–1123. [Google Scholar] [CrossRef] [PubMed]
- Lal, R. Soil erosion impact on agronomic productivity and environment quality. In Critical Reviews in Plant Sciences; CRC Press: Boca Raton, FL, USA, 1998; Volume 17, pp. 319–464. [Google Scholar]
- Bakker, M.M.; Govers, G.; Rounsevell, M.D. The crop productivity–erosion relationship: An analysis based on experimental work. CATENA 2004, 57, 55–76. [Google Scholar] [CrossRef]
- Gobin, A.; Jones, R.; Kirkby, M.; Campling, P.; Govers, G.; Kosmas, C.; Gentile, A. Indicators for pan−European assessment and monitoring of soil erosion by water. Environ. Sci. Policy 2004, 7, 25–38. [Google Scholar] [CrossRef]
- Volk, M.; Möller, M.; Wurbs, D. A pragmatic approach for soil erosion risk assessment within policy hierarchies. Land Use Policy 2010, 27, 997–1009. [Google Scholar] [CrossRef]
- Steinhoff−Knopp, B.; Burkhard, B. Soil erosion by water in Northern Germany: Long−term monitoring results from Lower Saxony. CATENA 2018, 165, 299–309. [Google Scholar] [CrossRef]
- Quinton, J.N.; Govers, G.; van Oost, K.; Bardgett, R.D. The impact of agricultural soil erosion on biogeochemical cycling. Nat. Geosci. 2010, 3, 311–314. [Google Scholar] [CrossRef] [Green Version]
- Quine, T.A.; van Oost, K. Quantifying carbon sequestration as a result of soil erosion and deposition: retrospective assessment using caesium−137 and carbon inventories. Glob. Chang. Biol. 2007, 13, 2610–2625. [Google Scholar] [CrossRef]
- Van Oost, K.; Quine, T.A.; Govers, G.; de Gryze, S.; Six, J.; Harden, J.W.; Ritchie, J.C.; McCarty, G.W.; Heckrath, G.; Kosmas, C.; et al. The impact of agricultural soil erosion on the global carbon cycle. Science 2007, 318, 626–629. [Google Scholar] [CrossRef] [PubMed]
- Van Lynden, G.W.J.; Oldeman, L.R. United nations environment programme. In The Assessment of the Status of Human−Induced Soil Degradation in South and Southeast Asia; International Soil Reference and Information Centre (ISRIC): Wageningen, The Netherlands, 1997. [Google Scholar]
- Koch, A.; McBratney, A.; Adams, M.; Field, D.; Hill, R.; Crawford, J.; Minasny, B.; Lal, R.; Abbott, L.; O’Donnell, A.; et al. Soil security: Solving the global soil crisis. Glob. Policy 2013, 4, 434–441. [Google Scholar] [CrossRef]
- Boardman, J.; Evans, R.; Favis−Mortlock, D.; Harris, T.M. Climate change and soil erosion on agricultural land in england and wales. Land Degrad. Rehabilit. 1990, 2, 95–106. [Google Scholar] [CrossRef]
- Zhang, Y.-G.; Nearing, M.A.; Zhang, X.-C.; Xie, Y.; Wei, H. Projected rainfall erosivity changes under climate change from multimodel and multiscenario projections in Northeast China. J. Hydrol. 2010, 384, 97–106. [Google Scholar] [CrossRef]
- Vanwalleghem, T.; Gómez, J.A.; Infante Amate, J.; González de Molina, M.; Vanderlinden, K.; Guzmán, G.; Laguna, A.; Giráldez, J.V. Impact of historical land use and soil management change on soil erosion and agricultural sustainability during the Anthropocene. Anthropocene 2017, 17, 13–29. [Google Scholar] [CrossRef]
- Mullan, D.; Favis−Mortlock, D.; Fealy, R. Addressing key limitations associated with modelling soil erosion under the impacts of future climate change. Agric. Forest Meteorol. 2012, 156, 18–30. [Google Scholar] [CrossRef] [Green Version]
- Fiener, P.; Auerswald, K.; van Oost, K. Spatio−temporal patterns in land use and management affecting surface runoff response of agricultural catchments—A review. Earth Sci. Rev. 2011, 106, 92–104. [Google Scholar] [CrossRef]
- Cerdà, A.; Brazier, R.; Nearing, M.; de Vente, J. Scales and erosion. CATENA 2013, 102, 1–82. [Google Scholar] [CrossRef]
- Routschek, A.; Schmidt, J.; Kreienkamp, F. Impact of climate change on soil erosion—A high−resolution projection on catchment scale until 2100 in Saxony/Germany. CATENA 2014, 121, 99–109. [Google Scholar] [CrossRef]
- Auerswald, K.; Fiener, P.; Dikau, R. Rates of sheet and rill erosion in Germany—A meta−analysis. Geomorphology 2009, 111, 182–193. [Google Scholar] [CrossRef]
- Saggau, P.; Bug, J.; Gocht, A.; Kruse, K. Aktuelle Bodenerosionsgefährdung durch Wind und Wasser in Deutschland. Bodenschutz 2017, 22, 120–125. [Google Scholar]
- Panagos, P.; Borrelli, P.; Poesen, J.; Ballabio, C.; Lugato, E.; Meusburger, K.; Montanarella, L.; Alewell, C. The new assessment of soil loss by water erosion in Europe. Environ. Sci. Policy 2015, 54, 438–447. [Google Scholar] [CrossRef]
- Merritt, W.S.; Letcher, R.A.; Jakeman, A.J. A review of erosion and sediment transport models. Environ. Model. Softw. 2003, 18, 761–799. [Google Scholar] [CrossRef]
- Renschler, C.S. Designing geo−spatial interfaces to scale process models: The GeoWEPP approach. Hydrol. Process. 2003, 17, 1005–1017. [Google Scholar] [CrossRef]
- Renschler, C.S.; Harbor, J. Soil erosion assessment tools from point to regional scales—The role of geomorphologists in land management research and implementation. Geomorphology 2002, 47, 189–209. [Google Scholar] [CrossRef]
- Horn, R.; Domżżał, H.; Słowińska−Jurkiewicz, A.; van Ouwerkerk, C. Soil compaction processes and their effects on the structure of arable soils and the environment. Soil Tillage Res. 1995, 35, 23–36. [Google Scholar] [CrossRef]
- Batey, T. Soil compaction and soil management—A review. Soil Use Manag. 2009, 25, 335–345. [Google Scholar] [CrossRef]
- Weisskopf, P.; Reiser, R.; Rek, J.; Oberholzer, H.-R. Effect of different compaction impacts and varying subsequent management practices on soil structure, air regime and microbiological parameters. Soil Tillage Res. 2010, 111, 65–74. [Google Scholar] [CrossRef]
- Gebhardt, S.; Fleige, H.; Horn, R. Effect of compaction on pore functions of soils in a Saalean moraine landscape in North Germany. J. Plant Nutr. Soil Sci. 2009, 172, 688–695. [Google Scholar] [CrossRef]
- Sanders, S. Erosionsmindernde Wirkung von Intervallbegrünungen: Untersuchungen im Weizen− und Zuckerrübenanbau mit Folgerungen für die Anbaupraxis. Ph.D. Thesis, Leibniz Universität Hannover, Hannover, Germany, January 2007. [Google Scholar]
- Bug, J. Modellierung der Linearen Bodenerosion: Entwicklung und Anwendung von Entscheidungsbasierten Modellen zur flächenhaften Prognose der Linearen Erosionsaktivität und des Gewässeranschlusses von Ackerflächen (Niedersachsen und Nordwestschweiz). Ph.D. Thesis, Universität Hannover, Hannover, Germany, November 2011. [Google Scholar]
- Fleige, H.; Horn, R. Field Experiments on the Effect of Soil Compactionon Soil Properties, Runoff, Interflow and Erosion. Adv. Geoecol. 2000, 32, 258–268. [Google Scholar]
- Sanders, S.; Mosimann, T. Erosionsschutz durch Intervallbegrünung in Fahrgassen: Ergebnisse aus Versuchen im Winterweizen. Wasser Abfall 2005, 10, 34–38. [Google Scholar]
- Tullberg, J.N.; Ziebarth, P.J.; Li, Y. Tillage and traffic effects on runoff. Soil Res. 2001, 39, 249–257. [Google Scholar] [CrossRef]
- Green, T.R.; Ahuja, L.R.; Benjamin, J.G. Advances and challenges in predicting agricultural management effects on soil hydraulic properties. Geoderma 2003, 116, 3–27. [Google Scholar] [CrossRef]
- Schaub, D. Die Bodenerosion im Lössgebiet des Hochrheintales (Möhliner Feld –Schweiz) als Faktor des Landschaftshaushaltes und der Landwirtschaft. Physiogeographica Basler Beiträge zur Physiogeographie 1989, 13, 1–228. [Google Scholar]
- Rauws, G.; Auzet, A.V. Laboratory experiments on the effects of simulated tractor wheelings on linear soil erosion. Soil Tillage Res. 1989, 13, 75–81. [Google Scholar] [CrossRef]
- Prasuhn, V. Soil erosion in the Swiss midlands: Results of a 10−year field survey. Geomorphology 2011, 126, 32–41. [Google Scholar] [CrossRef]
- Van den Bout, B. OpenLISEM Documentation & User Manual; Second Draft; OpenLISEM: Enschede, The Netherlands, 2018; pp. 1–252. [Google Scholar]
- Davison, P.S.; Withers, P.J.; Lord, E.I.; Betson, M.J.; Strömqvist, J. PSYCHIC—A process−based model of phosphorus and sediment mobilisation and delivery within agricultural catchments. Part 1: Model description and parameterisation. J. Hydrol. 2008, 350, 290–302. [Google Scholar] [CrossRef]
- Roo, A.P.D.; Wesseling, C.G.; Cremers, R.J.; Offermans, R.J.E. LISEM: A new physically−based hydrological and soil erosion model in a GIS−environment, theory and implementation. Var. Stream Erosion Sediment Transp. 1994, 224, 439–448. [Google Scholar]
- Duttmann, R.; Schwanebeck, M.; Nolde, M.; Horn, R. Predicting Soil Compaction Risks Related to Field Traffic during Silage Maize Harvest. Soil Sci. Soc. Am. J. 2014, 78, 408. [Google Scholar] [CrossRef]
- Augustin, K.; Kuhwald, M.; Brunotte, J.; Duttmann, R. FiTraM: A model for automated spatial analyses of wheel load, soil stress and wheel pass frequency at field scale. Biosyst. Eng. 2019, 180, 108–120. [Google Scholar] [CrossRef]
- Pineux, N.; Lisein, J.; Swerts, G.; Bielders, C.L.; Lejeune, P.; Colinet, G.; Degré, A. Can DEM time series produced by UAV be used to quantify diffuse erosion in an agricultural watershed? Geomorphology 2017, 280, 122–136. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen−Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 4, 1633–1644. [Google Scholar] [CrossRef]
- DWD. Data Source: Deutscher Wetterdienst. Available online: https://opendata. dwd.de/ (accessed on 1 July 2018).
- Landesamt für Vermessung und Geoinformation. ©GeoBasis_DE/LVermGeoSH: Digital Orthofoto 2017. Available online: www.schleswig-holstein.de/DE/Landesregierung/LVERMGEOSH/lvermgeosh_node.html (accessed on 1 July 2018).
- European Commission. © EuroGeographics for the administrative boundaries: NUTS1; European Commission: Bruxelles, Belgium, 2018; Available online: ec.europa.eu/eurostat/web/gisco/geodata/reference-data/administrative-units-statistical-units/nuts (accessed on 1 July 2018).
- FAO. World Reference Base for Soil Resources 2014; FAO: Rome, Italy, 2014; pp. 1–192. [Google Scholar]
- Hassenpflug, W. Studien zur rezenten Hangüberformung in der Knicklandschaft Schleswig−Holsteins. Forschungen zur dt. Landeskunde 1971. [Google Scholar]
- Schleuß, U.; Blume, H.-P. Ecology, classification and soil pattern of colluvial soils of the bornhoeved lake district (NorthGermany). Zeitschrift Pflanzenernährung Bodenkunde 1996, 159, 23–29. [Google Scholar]
- Schmidt, J. A mathematical model to simulate rainfall erosion. In Erosion, Transport and Deposition Processes—Theories and Models. CATENA 1991, 19, 101–109. [Google Scholar]
- Entwicklung und Anwendung eines physikalisch begründeten Simulationsmodells für die Erosion geneigter landwirtschaftlicher Nutzflächen. In Berliner Geographische Abhandlungen; Schmidt, J. (Ed.) Selbstverl. des Inst. für Geograph: Berlin, Germany, 1996; ISBN 3880090629. [Google Scholar]
- Von Werner, M. GIS−Orientierte Methoden der Digitalen Reliefanalyse zur Modellierung von Bodenerosion in Kleinen Einzugsgebieten. Ph.D. Thesis, Freie Universität Berlin, Berlin, Germany, 1995. [Google Scholar]
- Werner, M.V. Erosion-3D Benutzerhandbuch; Version 3.15; Michael von Werner: Berlin, Germany, 2007; pp. 1–69. [Google Scholar]
- Jetten, V.; de Roo, A.; Favis−Mortlock, D. Evaluation of field−scale and catchment−scale soil erosion models. CATENA 1999, 37, 521–541. [Google Scholar] [CrossRef]
- Schmidt, J.; Werner, M.V.; Michael, A. Application of the EROSION 3D model to the CATSOP watershed, The Netherlands. CATENA 1999, 37, 449–456. [Google Scholar] [CrossRef]
- Duttmann, R. Partikuläre Stoffverlagerungen in Landschaften. Ansätze zur flächenhaften Vorhersage von Transportpfaden und Stoffumlagerungen auf verschiedenen Massstabsebenen unter besonderer Berücksichtigung räumlich−zeitlicher Veränderungen der Bodenfeuchte; Geographisches Inst., Abt. Physische Geographie und Landschaftsökologie, Sekretariat: Hannover, Germany, 1999; ISBN 9783927053267. [Google Scholar]
- Hebel, B. Validierung numerischer Erosionsmodelle in Einzelhang− und Einzugsgebietdimension. Physiogeographica Basler Beiträge zur Physiogeographie 2003, 32, 1–181. [Google Scholar]
- Michael, A.; Schmidt, J.; Enke, W.; Deutschländer, T.; Malitz, G. Impact of expected increase in precipitation intensities on soil loss—results of comparative model simulations. CATENA 2005, 61, 155–164. [Google Scholar] [CrossRef]
- Schob, A.; Schmidt, J.; Tenholtern, R. Derivation of site−related measures to minimise soil erosion on the watershed scale in the Saxonian loess belt using the model EROSION 3D. CATENA 2006, 68, 153–160. [Google Scholar] [CrossRef]
- Defersha, M.B.; Melesse, A.M.; McClain, M.E. Watershed scale application of WEPP and EROSION 3D models for assessment of potential sediment source areas and runoff flux in the Mara River Basin, Kenya. CATENA 2012, 95, 63–72. [Google Scholar] [CrossRef]
- Schindewolf, M.; Schmidt, J.; von Werner, M. Modeling soil erosion and resulting sediment transport into surface water courses on regional scale. Zeitschrift Geomorphol. Suppl. Issues 2012, 57, 157–175. [Google Scholar] [CrossRef]
- Starkloff, T.; Stolte, J. Applied comparison of the erosion risk models EROSION 3D and LISEM for a small catchment in Norway. CATENA 2014, 118, 154–167. [Google Scholar] [CrossRef] [Green Version]
- Hänsel, P.; Kaiser, A.; Buchholz, A.; Böttcher, F.; Langel, S.; Schmidt, J.; Schindewolf, M. Mud Flow Reconstruction by Means of Physical Erosion Modeling, High−Resolution Radar−Based Precipitation Data, and UAV Monitoring. Geosciences 2018, 8, 427. [Google Scholar] [CrossRef]
- Green, W.H.; Ampt, G.A. Studies on soil physics. J. Agric. Sci. 1911, 4, 1–24. [Google Scholar] [CrossRef]
- Modelling long−term soil loss and landform change. In Overland Flow—Hydraulics and Erosion Mechanics; Schmidt, J. (Ed.) University College London Press: London, UK, 1992; ISBN 1-85728-006-7 HB. [Google Scholar]
- Schmidt, J.; Werner, M.V.; Schindewolf, M. Wind effects on soil erosion by water—A sensitivity analysis using model simulations on catchment scale. CATENA 2017, 148, 168–175. [Google Scholar] [CrossRef]
- Klik, A.; Zartl, A.S.; Hebel, B.; Schmidt, J. Comparing RUSLE, EROSION 2D/3D, and WEPP soil loss calculations with four years of observed data. Proceedings of ASAE Annual International Meeting, Orlando, FL, USA, 12–16 June 1998. [Google Scholar]
- Michael, A. Anwendung des Physikalisch Begründeten Erosionsprognosemodells EROSION 2D/3D: Empirische Ansätze zur Ableitung der Modellparameter. Ph.D. Thesis, Technischen Universität Bergakademie Freiberg, Freiberg, Germany, 2001. [Google Scholar]
- Schindewolf, M.; Schmidt, J. Parameterization of the EROSION 2D/3D soil erosion model using a small−scale rainfall simulator and upstream runoff simulation. CATENA 2012, 91, 47–55. [Google Scholar] [CrossRef]
- Michael, A.; Schmidt, J.; Schmidt, W. Band II: Parameterkatalog Sachsen Anwendung. In Erosion 2D/3D-Ein Computermodell zu Simulation der Bodenerosion durch Wasser; Sächsisches Landesamt für Landwirtschaft, Umwelt und Geologie: Dresden, Freiberg, Germany, 1996; p. 121. [Google Scholar]
- Schindewolf, M.; Schmidt, W. Erosion 3D Sachsen. Schriftenreihe des Landesamtes für Umwelt Landwirtsch. Geol. 2010, Heft 9, 1–116. [Google Scholar]
- Hancock, G.R.; Evans, K.G. Channel head location and characteristics using digital elevation models. Earth Surf. Process. Landforms 2006, 31, 809–824. [Google Scholar] [CrossRef]
- Moore, I.D.; Grayson, R.B.; Ladson, A.R. Digital terrain modelling: A review of hydrological, geomorphological, and biological applications. Hydrol. Process. 1991, 5, 3–30. [Google Scholar] [CrossRef]
- Landesamt für Vermessung und Geoinformation. ©GeoBasis_DE/LVermGeoSH: Digital Elevation Model (1x1 m) 2005−2007. Available online: https://www.schleswig-holstein.de/DE/Landesregierung/LVERMGEOSH/lvermgeosh_node.html (accessed on 1 July 2018).
- Saggau, P.; Kuhwald, M.; Duttmann, R. Incorporation of high−resolute data in physical based soil erosion modelling on the catchment scale in preparation. until accepted is unpublished data.
- Von Werner, M. Datenbank-Prozessor (DPROC). Benutzerhandbuch; von Werner, M., Ed.; Version 1.80; Benutzerhandbuch: Berlin, Germany, 2009; pp. 1–68. [Google Scholar]
- Rohr, W.; Mosimann, T.; Bono, R.; Rüttimann, M.; Prasuhn, V. Kartieranleitung zur Aufnahme von Bodenerosionsformen und −schäden auf Ackerflächen: Legende, Erläuterungen zur Kartiertechnik, Schadensdokumentation und Fehlerabschätzung. Materialien zur Physiogeographie 1990, 14, 1–56. [Google Scholar]
- Deutscher Verband für Wasserwirtschaft und Kulturbau. Bodenerosion durch Wasser: Kartieranleitung zur Erfassung aktueller Erosionsformen; Wirtschafts− und Verl.−Ges. Gas und Wasser: Bonn, Germany, 1996; ISBN 3-89554-045-5. [Google Scholar]
- Prasuhn, V. On−farm effects of tillage and crops on soil erosion measured over 10 years in Switzerland. Soil Tillage Res. 2012, 120, 137–146. [Google Scholar] [CrossRef]
- Ledermann, T.; Herweg, K.; Liniger, H.; Schneider, F.; Hurni, H.; Prasuhn, V. Erosion damage mapping: assessing current soil erosion damage in Switzerland. Adv. Geoecol. 2008, 41, 236–283. [Google Scholar]
- Steinhoff, B.; Bug, J.; Mosimann, T. Einsatz eines mobilen GIS zur Kartierung von Bodenerosion durch Wasser. In Neue Horizonte für Geodateninfrastrukturen—Open GeoData, Mobility, 3D−Stadt: Tagungsband zum 9. GeoForum MV; Warnemünde, 15. und 16. April 2013, Bildungs− und Konferenzzentrum des Technologieparks Warnemünde; Bill, R., Flach, G., Korduan, P., Zehner, M., Seip, S., Eds.; Gito: Berlin, Germany, 2013; pp. 27–32. ISBN 3955450058. [Google Scholar]
- Withers, P.J.A.; Hodgkinson, R.A.; Bates, A.; Withers, C.M. Some effects of tramlines on surface runoff, sediment and phosphorus mobilization on an erosion−prone soil. Soil Use Manag. 2006, 22, 245–255. [Google Scholar] [CrossRef]
- Silgram, M.; Jackson, D.; Bailey, A.; Quinton, J.; Stevens, C. Hillslope scale surface runoff, sediment and nutrient losses associated with tramline wheelings. Earth Surf. Process. Landforms 2010, 35, 699–706. [Google Scholar] [CrossRef]
- Hieke, F.; Schmidt, J. The effect of soil bulk density on rill erosion – results of experimental studies. Zeitschrift für Geomorphol. 2013, 57, 245–266. [Google Scholar] [CrossRef]
- Govers, G.; Poesen, J. Assessment of the interrill and rill contributions to total soil loss from an upland field plot. Geomorphology 1988, 1, 343–354. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: importance and research needs. CATENA 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Auerswald, K.; Kainz, M. Erosionsgefährdung (C−Faktor) durch Sonderkulturen. Bodenschutz 1998, 3, 98–102. [Google Scholar]
- Eltner, A.; Baumgart, P.; Maas, H.-G.; Faust, D. Multi−temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Landforms 2015, 40, 741–755. [Google Scholar] [CrossRef]
- Kaiser, A.; Neugirg, F.; Rock, G.; Müller, C.; Haas, F.; Ries, J.; Schmidt, J. Small−Scale Surface Reconstruction and Volume Calculation of Soil Erosion in Complex Moroccan Gully Morphology Using Structure from Motion. Remote Sensing 2014, 6, 7050–7080. [Google Scholar] [CrossRef]
- Dörner, J.; Horn, R. Direction−dependent behaviour of hydraulic and mechanical properties in structured soils under conventional and conservation tillage. Soil Tillage Res. 2009, 102, 225–232. [Google Scholar] [CrossRef]
- Horn, R.; Way, T.; Rostek, J. Effect of repeated tractor wheeling on stress/strain properties and consequences on physical properties in structured arable soils. Soil Tillage Res. 2003, 73, 101–106. [Google Scholar] [CrossRef]
- Pagliai, M.; Marsili, A.; Servadio, P.; Vignozzi, N.; Pellegrini, S. Changes in some physical properties of a clay soil in Central Italy following the passage of rubber tracked and wheeled tractors of medium power. Soil Tillage Res. 2003, 73, 119–129. [Google Scholar] [CrossRef]
- Vanmaercke, M.; Poesen, J.; Verstraeten, G.; de Vente, J.; Ocakoglu, F. Sediment yield in Europe: spatial patterns and scale dependency. Geomorphology 2011, 130, 142–161. [Google Scholar] [CrossRef]
- Verstraeten, G.; Poesen, J. Factors controlling sediment yield from small intensively cultivated catchments in a temperate humid climate. Geomorphology 2001, 40, 123–144. [Google Scholar] [CrossRef]
- Schmidt, J.; Schmidt, W.; Werner, M.; Michael, A. Actions against soil erosion at the single field and the catchment scale guided by computer simulation. In Proceedings of the Selected Papers from the 10th International Soil Conservation Organization Meeting, West Lafayette, IN, USA, 24–29 May 2001. [Google Scholar]
- Mosimann, T.; Sanders, S.; Brunotte, J. Erosion reduction in tractor tracks – the effects of intermittent planting in tractor tracks of wheat and sugar beet fields withdifferent soil cultivation. Pflanzenbauwissenschaften 2007, 11, 57–66. [Google Scholar]
- Mosimann, T.; Sanders, S.; Brunotte, J. Erosion protection in tractor tracks. Landtech 2008, 1, 20–21. [Google Scholar] [CrossRef]
- Kuhwald, M.; Dörnhöfer, K.; Oppelt, N.; Duttmann, R. Spatially explicit soil compaction risk assessment of arable soils at regional scale: The SaSCiA−model. Sustainability 2018, 10, 1618. [Google Scholar] [CrossRef]


| Field | Area (ha) | Crop Type | Tillage Tool | 1 Soil Cover (%) | 2 TL-Direction to Contour | 2 TL Area (%) |
|---|---|---|---|---|---|---|
| A | 13.6 | Winter wheat | chisel plough | 8 | orthogonal | 6.9 |
| B | 19.6 | Winter barely | mouldboard plough | 19.2 | parallel | 6.3 |
| C | 14.4 | Summer barely (follow) | chisel plough | 26.5 | orthogonal | 6.8 |
| Parameter | Resolution | Scenario | Sum | Min | Max | Median | Mean | SD (±) | SE (±) |
|---|---|---|---|---|---|---|---|---|---|
| Sediment | SQS | 5 × 5 | −5,071,330.00 | −9670.1 | 4171.3 | −0.3 | −10.4 | 150.4 | 1.1 |
| Budget | 1 × 1 | −10,237,723.10 | −106,637.0 | 18,975.0 | −0.1 | −21.6 | 500.2 | 0.7 | |
| 0.5 × 0.5 | −10,758,013.65 | −185,914.8 | 237,472.9 | 0.0 | −22.6 | 755.3 | 0.5 | ||
| TLS | 5 × 5 | −14,100,857.50 | −4043.1 | 360.9 | −0.2 | −29.0 | 86.4 | 0.6 | |
| 1 × 1 | −13,062,212.50 | −24,098.8 | 1361.8 | 0.0 | −27.5 | 206.5 | 0.3 | ||
| 0.5 × 0.5 | −12,679,400.95 | −131,107.9 | 8009.3 | 0.0 | −26.7 | 294.9 | 0.2 | ||
| Runoff | SQS | 5 × 5 | 6,302,855.00 | 0.0 | 1440.0 | 2.4 | 13.0 | 55.9 | 0.4 |
| 1 × 1 | 6,855,674.50 | 0.0 | 7381.8 | 1.1 | 14.5 | 148.0 | 0.2 | ||
| 0.5 × 0.5 | 6,956,624.60 | 0.0 | 14,839.0 | 0.8 | 14.6 | 214.0 | 0.2 | ||
| TLS | 5 × 5 | 7,637,375.00 | 0.0 | 1670.0 | 3.0 | 15.7 | 65.8 | 0.5 | |
| 1 × 1 | 7,495,960.40 | 0.0 | 7921.6 | 1.3 | 15.8 | 159.5 | 0.2 | ||
| 0.5 × 0.5 | 7,310,910.38 | 0.0 | 15,431.2 | 0.8 | 15.4 | 223.0 | 0.2 |
| Field | Section | Sediment Budget (kg m−2) | Runoff (m3) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | SD (±) | Sum | Share | Mean | SD (±) | Sum | Share | ||
| A | TL | −99.0 | 410.1 | −1,535,798.3 | 78.3% | 7.6 | 74.2 | 118,545.0 | 10.4% |
| CF | −3.5 | 84.7 | −426,392.9 | 21.7% | 8.4 | 77.0 | 1,020,747.7 | 89.6% | |
| B | TL | −99.4 | 256.3 | −2,190,394.9 | 34.1% | 18.8 | 178.6 | 413,572.8 | 10.0% |
| CF | −24.3 | 145.9 | −4,225,055.4 | 65.9% | 21.4 | 204.3 | 3,719,740.5 | 90.0% | |
| C | TL | −162.7 | 599.1 | −2,834,316.7 | 60.4% | 19.6 | 187.3 | 341,066.6 | 15.3% |
| CF | −15.0 | 195.7 | −1,854,796.4 | 39.6% | 15.2 | 147.2 | 1,882,425.6 | 84.7% | |
| Total | TL | −120.4 | 769.9 | −6,560,509.9 | 50.2% | 15.3 | 269.2 | 873,184.4 | 11.6% |
| CF | −14.3 | 258.4 | −6,506,244.8 | 49.8% | 15.0 | 263.3 | 6,622,913.8 | 88.4% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saggau, P.; Kuhwald, M.; Duttmann, R. Integrating Soil Compaction Impacts of Tramlines Into Soil Erosion Modelling: A Field-Scale Approach. Soil Syst. 2019, 3, 51. https://doi.org/10.3390/soilsystems3030051
Saggau P, Kuhwald M, Duttmann R. Integrating Soil Compaction Impacts of Tramlines Into Soil Erosion Modelling: A Field-Scale Approach. Soil Systems. 2019; 3(3):51. https://doi.org/10.3390/soilsystems3030051
Chicago/Turabian StyleSaggau, Philipp, Michael Kuhwald, and Rainer Duttmann. 2019. "Integrating Soil Compaction Impacts of Tramlines Into Soil Erosion Modelling: A Field-Scale Approach" Soil Systems 3, no. 3: 51. https://doi.org/10.3390/soilsystems3030051
APA StyleSaggau, P., Kuhwald, M., & Duttmann, R. (2019). Integrating Soil Compaction Impacts of Tramlines Into Soil Erosion Modelling: A Field-Scale Approach. Soil Systems, 3(3), 51. https://doi.org/10.3390/soilsystems3030051