



Optimized Wireless Sensor Network Architecture for AI-Based Wildfire Detection in Remote Areas



Abstract

1. Introduction
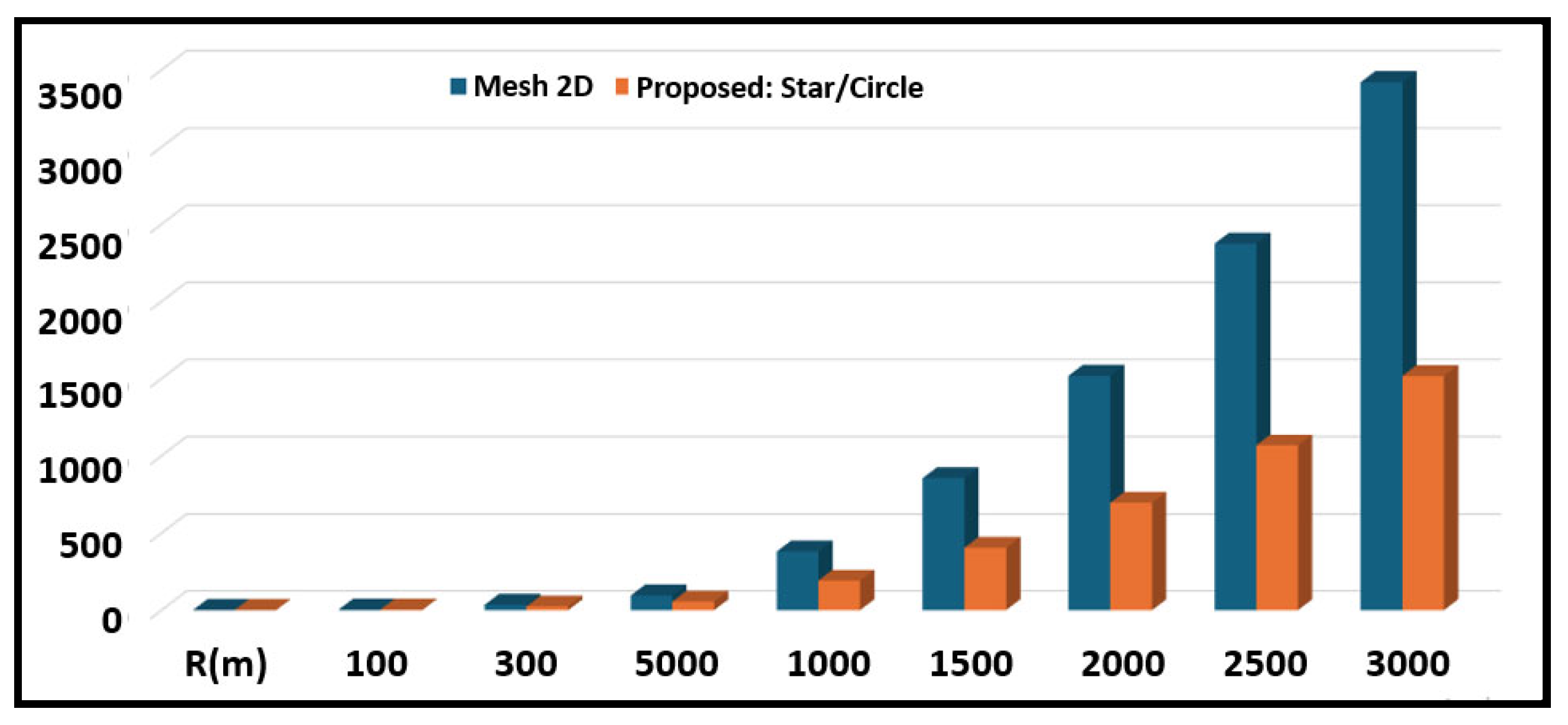
- A novel hybrid star/circular WSN topology optimized for remote forest environments, reducing node deployment by 53–55% compared to conventional Mesh 2D topologies while ensuring robust coverage through concentric tiered arrangements adaptable to flat or mountainous terrain.
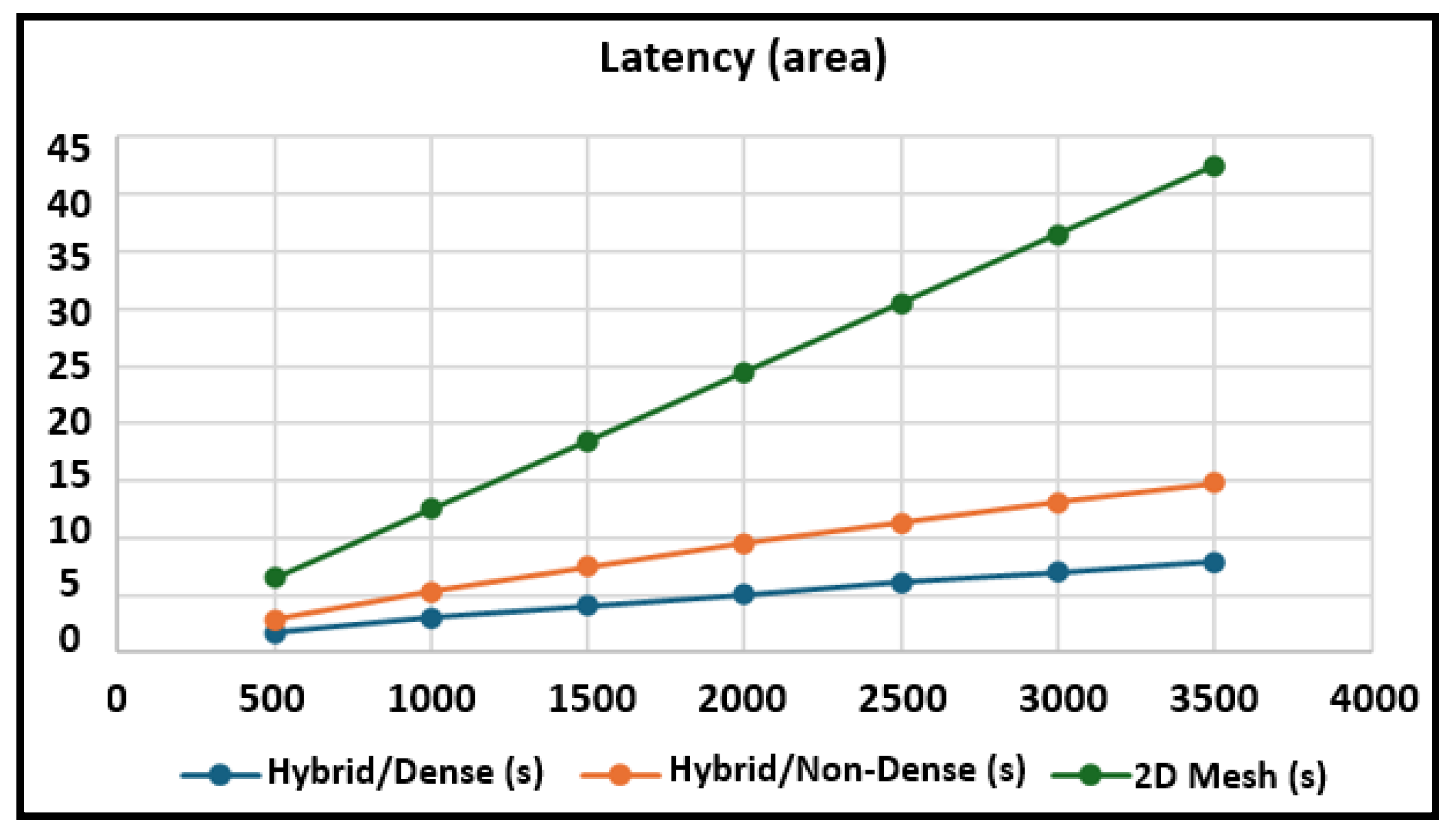
- An adaptive routing framework supporting dynamic vertical inter-tier jumps and priority-based arbitration, reducing latency by 41–81% and hops by 50–60% in dense forests while maintaining connectivity during node failures or congestion.
- A lightweight AI-driven fire-risk classifier using multiclass logistic regression on real-time temperature/humidity data, achieving 99.97% accuracy with minimal computational overhead, validated against meteorological datasets from Saudi Arabia.
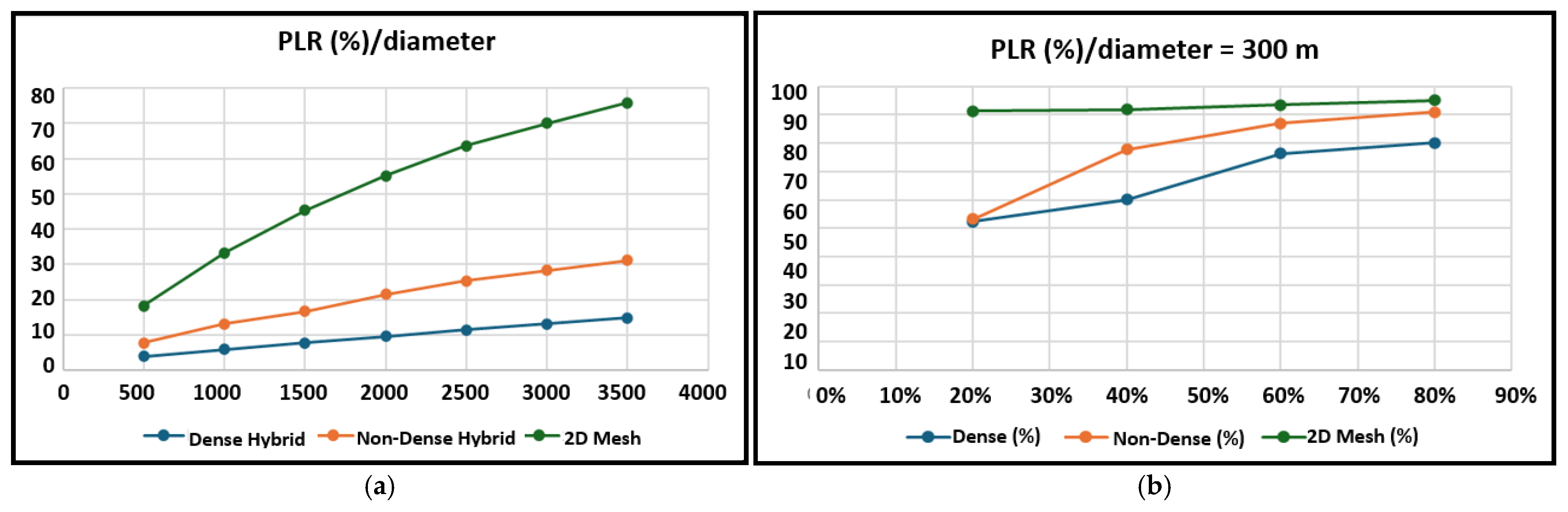
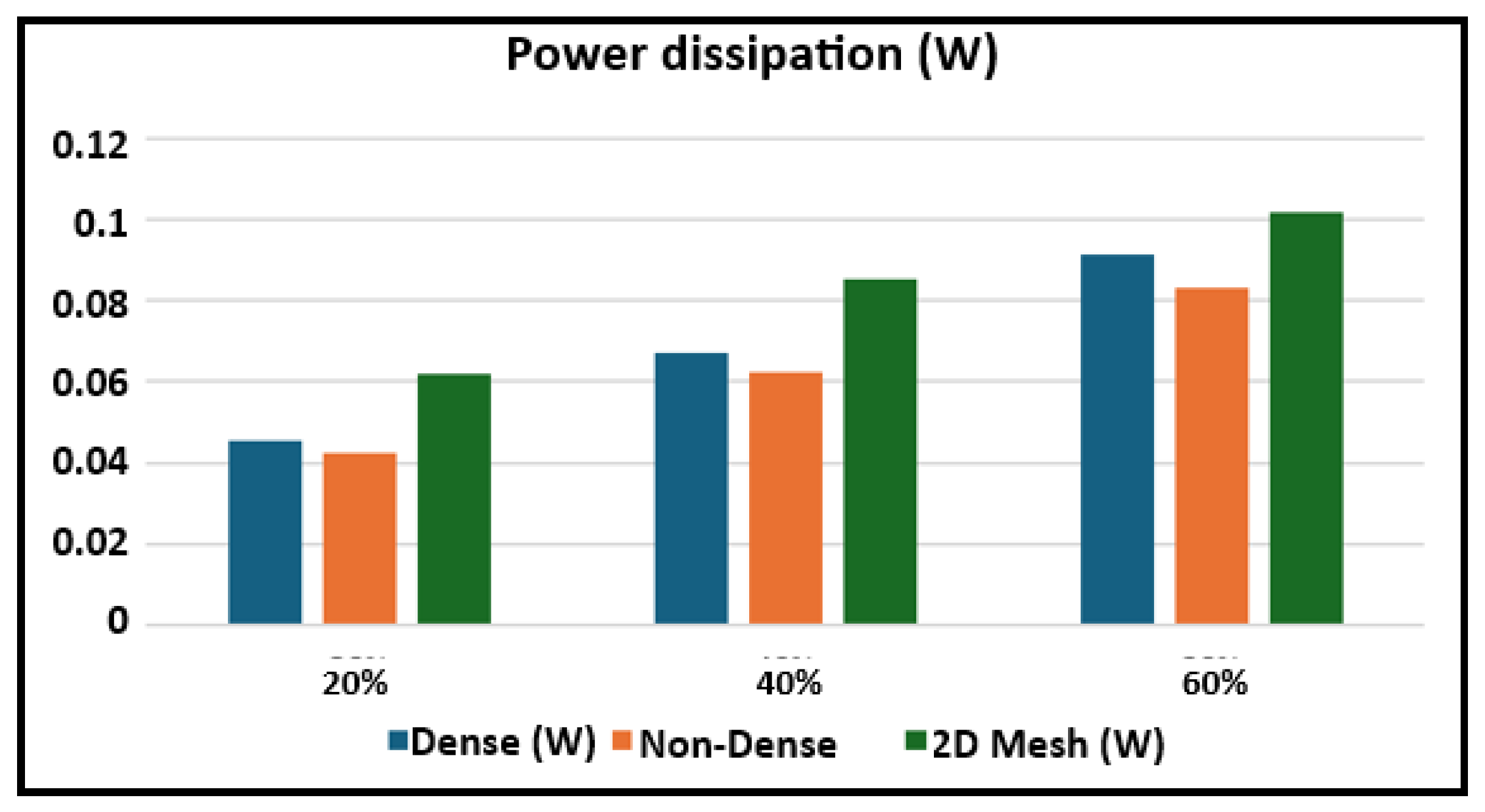
- Comprehensive simulation-based validation demonstrating superior packet loss reduction (up to 80.4%), energy efficiency (0.0425–0.0832 W in non-dense topology), and scalability across diverse forest densities using Proteus (hardware-level) and CupCarbon (network-level) tools.
- Practical deployment innovations, including GSM integration for offline alert transmission, dynamic round-robin arbitration for conflict resolution, and topology configurability for mixed terrains, ensuring cost-effective and reliable operation in resource-constrained areas.
2. Literature Review
3. WSN Architecture
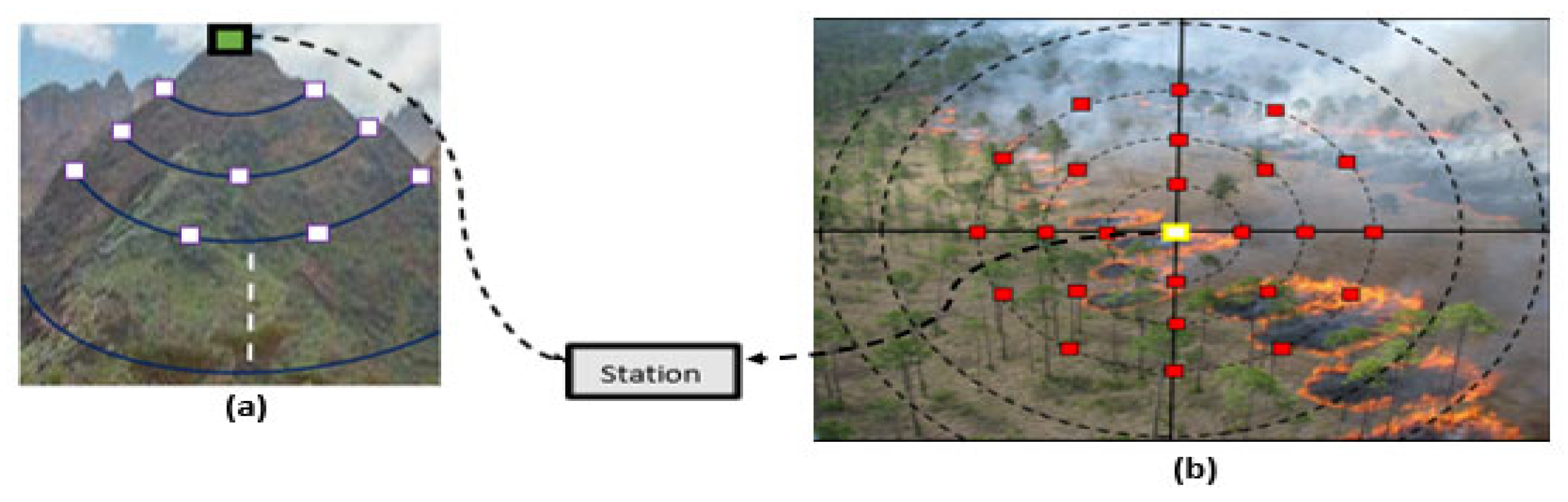
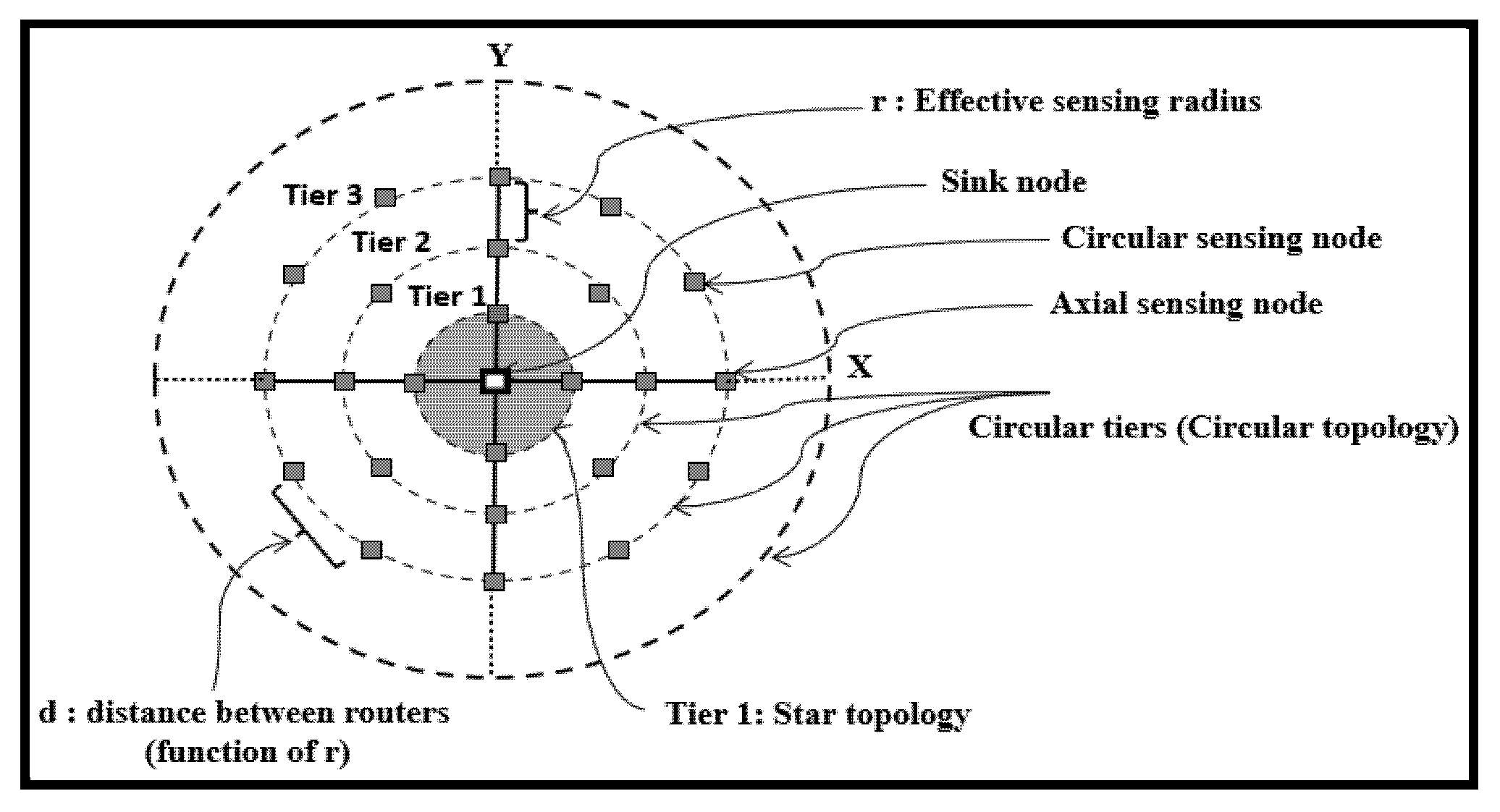
3.1. Star/Circle Topology
3.2. Node Deployments
- N: total number of sensing nodes in the network;
- A: area of the forest;
- R: radius of the flat forest area;
- NC: total number of circular tiers;
- r: effective sensing radius;
- d: distance between two neighboring nodes on a circle (dependent on r);
- Ni: index (order) of the circle;
- n: number of nodes in a circle.
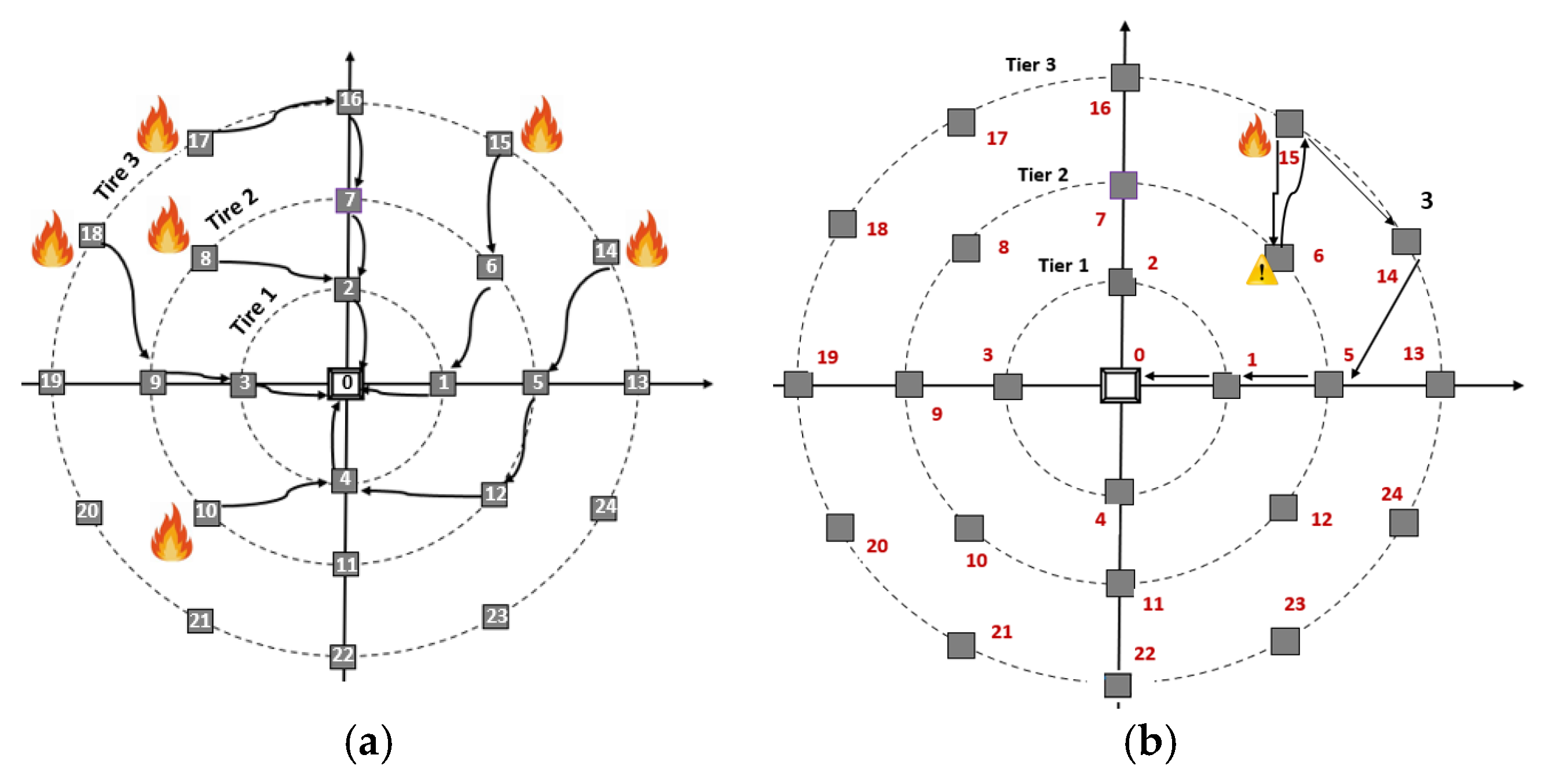
3.3. Routing Algorithms and Applications
3.3.1. Routing in Dense Forests
3.3.2. Routing in Non-Dense Forests
3.4. Latency and Packet Loss
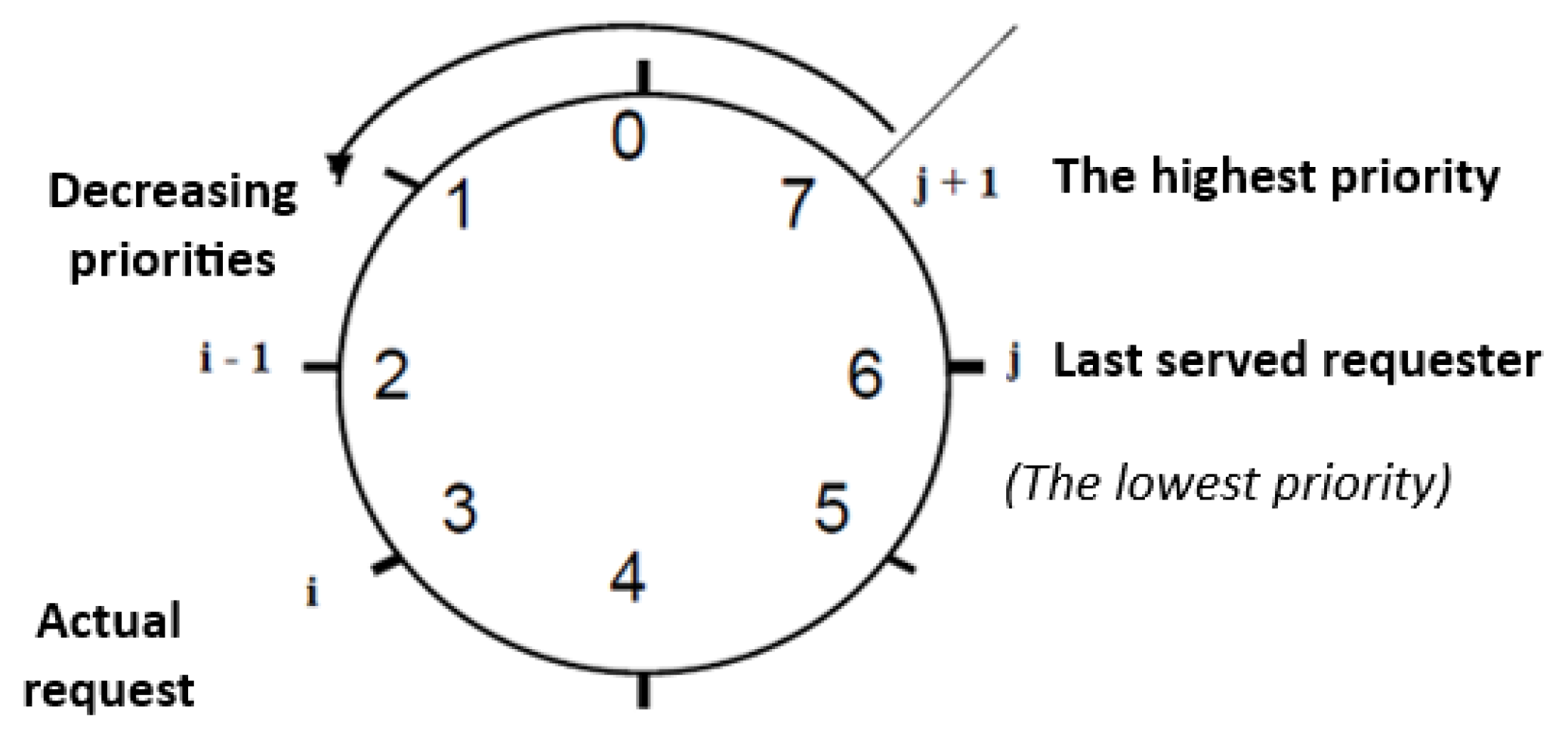
3.5. Sensor Node Arbitration
| Algorithm 1: Round-robin algorithm |
| Input: X [0…n − 1]: Array of request signals (1 = active, 0 = inactive) P [0…n − 1]: Priority list (round-robin) N: Rank register n: Total number of requesters Output: Z [0…n − 1]: Grant signals Wait until any X(i) = 1 for i = 0 to n − 1 status ← X [0…n − 1] //Identify active requests Nb ← CalculateRequesterNumber (status) //Count number of active requests if Nb ≥ 1 then i ← SelectRequester (status, P) //Choose the highest priority requester Z(i) ← 1 // Grant access Wait until X(i) = 0 //Wait for requester to finish Z(i) ← 0 // Revoke access j ← FetchPriorityOrder (P, i) //Get position of granted requester P ← Concatenate (P [j + 1…n − 1], P [0…j − 1], P[j]) //Update round-robin priority end if |
3.6. AI-Based Fire Risk Prediction Approach
4. Experimental Results
4.1. Proteus Simulation
4.2. WSN Simulation
4.2.1. Topology Deployment Efficiency
4.2.2. Latency and Packet Loss Analysis
4.2.3. Energy Dissipation Analysis
- N: Number of nodes in the network.
- D: Duty cycle (fraction of time active), proportional to fire rate (e.g., D = 0.2 at 20% fire rate).
- Ptx, Prx, Pidle, Psleep: Power consumed in transmit, receive, idle, and sleep states.
- C: Number of data packets transmitted.
- h: Average hop count (depends on topology).
4.2.4. Component Ablation Analysis
4.3. Computational Complexity Analysis
4.3.1. Routing Complexity
4.3.2. Arbitration and AI Inference
4.3.3. Topology Deployment and Energy Efficiency
4.4. Comparative Analysis with State-of-the-Art Wildfire Detection Systems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chowdary, V.; Gupta, M.K.; Singh, R. A Review on Forest Fire Detection Techniques: A Decadal Perspective. Int. J. Eng. Technol. 2018, 7, 1312–1316. [Google Scholar] [CrossRef]
- Safford, H.D.; Paulson, A.K.; Steel, Z.L.; Young, D.J.; Wayman, R.B. The 2020 California Fire Season: A Year like No Other, a Return to the Past or a Harbinger of the Future? Glob. Ecol. Biogeogr. 2022, 31, 2005–2025. [Google Scholar] [CrossRef]
- Yu, L.; Wang, N.; Meng, X. Real-Time Forest Fire Detection with Wireless Sensor Networks. In Proceedings of the 2005 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 26 September 2005; pp. 1214–1217. [Google Scholar]
- Jin, L.; Yu, Y.; Zhou, J.; Bai, D.; Lin, H.; Zhou, H. SWVR: A Lightweight Deep Learning Algorithm for Forest Fire Detection and Recognition. Forests 2024, 15, 204. [Google Scholar] [CrossRef]
- Khan, F.; Xu, Z.; Sun, J.; Khan, F.M.; Ahmed, A.; Zhao, Y. Recent Advances in Sensors for Fire Detection. Sensors 2022, 22, 3310. [Google Scholar] [CrossRef]
- Farej, Z.K.; Abdul-Hameed, A.M. Performance Comparison among (Star, Tree and Mesh) Topologies for Large Scale WSN based IEEE 802.15.4 Standard. Int. J. Comput. Appl. 2015, 124, 41–44. [Google Scholar] [CrossRef]
- Jaladi, A.R.; Khithani, K.; Pawar, P.; Malvi, K.; Sahoo, G. Environmental Monitoring Using Wireless Sensor Networks (WSN) Based on IoT. Int. Res. J. Eng. Technol. 2017, 4, 1371–1378. [Google Scholar]
- Al-Karaki, J.N.; Kamal, A.E. Routing Techniques in Wireless Sensor Networks: A Survey. IEEE Wirel. Commun. 2004, 11, 6–28. [Google Scholar] [CrossRef]
- Atighi, I.; Zhou, Z. Safeguarding Forest Ecosystems: Harnessing IoT for Fire Detection. Big Data Comput. Vis. 2023, 3, 146–153. [Google Scholar]
- Choi, H.-H.; Lee, K. Cooperative Wireless Power Transfer for Lifetime Maximization in Wireless Multihop Networks. IEEE Trans. Veh. Technol. 2021, 70, 3984–3989. [Google Scholar] [CrossRef]
- Kaur, P.; Kaur, K.; Singh, K.; Kim, S. Early Forest Fire Detection Using a Protocol for Energy-Efficient Clustering with Weighted-Based Optimization in Wireless Sensor Networks. Appl. Sci. 2023, 13, 3048. [Google Scholar] [CrossRef]
- Ferdoush, S.; Li, X. Wireless Sensor Network System Design Using Raspberry Pi and Arduino for Environmental Monitoring Applications. Procedia Comput. Sci. 2014, 34, 103–110. [Google Scholar] [CrossRef]
- IEEE 802.15.4-2020; Low-Rate Wireless Personal Area Networks (LR-WPANs). IEEE: New York, NY, USA, 2020.
- Vijayan, S.G.; Abd Rahman, N.A.; Harun, K.S. A Conceptual Framework of Zigbee Wireless Sensor Networks for Safety, Reliability and Security Improvement. AIP Conf. Proc. 2024, 2802, 190001. [Google Scholar] [CrossRef]
- Alvares, B.; Perez, E.; Trigueros, J.; Ho, J.; Ly, E.; Le, H.T. Development of a Solar-Powered Wildfire Detector System for Remote Locations with XBee and GSM Capabilities. WSEAS Trans. Comput. 2021, 20, 189–198. [Google Scholar] [CrossRef]
- Dasari, P.; Reddy, G.K.J.; Gudipalli, A. Forest Fire Detection Using Wireless Sensor Networks. Int. J. Smart Sens. Intell. Syst. 2020, 13, 1–8. [Google Scholar] [CrossRef]
- Ganesan, R.; Devika, R.; Kumar, N.R.; Devi, S.S. Forest Fire Monitoring System Based on GPRS and Zigbee Wireless Sensor Networks. Int. J. Adv. Inf. Sci. Technol. 2015, 4, 16–21. [Google Scholar]
- Salaria, A.; Singh, A. A Guide for Selection of Wireless Communication Technology for Effective and Robust Early Forest Fire Detection System. Bull. Electr. Eng. Inf. 2025, 14, 1026–1035. [Google Scholar] [CrossRef]
- Somov, A. Wildfire Safety with Wireless Sensor Networks. EAI Endorsed Trans. Ambient Syst. 2011, 11. [Google Scholar] [CrossRef]
- Gomathi, C.; Vennila, K.; Sathyananth, M.; Shriaarthi, B.; Selvarasu, S. Forest Fire Detection Using Wireless Sensor Network. Int. J. Eng. Res. Technol. (IJERT) 2015, 3, 4. [Google Scholar]
- Sabit, H.; Al-Anbuky, A.; GholamHosseini, H. Wireless Sensor Network-Based Wildfire Hazard Prediction System Modeling. Procedia Comput. Sci. 2011, 5, 106–114. [Google Scholar] [CrossRef]
- Bahrepour, M.; Meratnia, N.; Havinga, P.J. Use of AI Techniques for Residential Fire Detection in Wireless Sensor Networks. In Proceedings of the 5th IFIP Conference on Artificial Intelligence Applications & Innovations (AIAI 2009), Thessaloniki, Greece, 23–25 April 2009; pp. 311–321. [Google Scholar]
- Ko, A.; Lee, N.M.Y.; Sham, R.P.S.; So, C.M.; Kwok, S.C.F. Intelligent Wireless Sensor Network for Wildfire Detection. WIT Trans. Ecol. Environ. 2012, 158, 137–148. [Google Scholar]
- Pradeep, S.; Sharma, Y.K.; Verma, C.; Constantin, N.B.; Illés, Z.; Raboaca, M.S.; Mihaltan, T.C. Utilizing WSN and Artificial Intelligence to Detect Fires. In Proceedings of the 2022 11th IEEE International Conference on System Modeling & Advancement in Research Trends (SMART), Moradabad, India, 16–17 December 2022; pp. 424–428. [Google Scholar] [CrossRef]
- Varela, N.; Díaz-Martinez, J.L.; Ospino, A.; Zelaya, N.A.L. Wireless Sensor Network for Forest Fire Detection. Procedia Comput. Sci. 2020, 175, 435–440. [Google Scholar] [CrossRef]
- Attia, M.W.; Abu Zaher, B.A.; Nasser, N.H.; Al-Hour, R.R.; Asfour, A.H.; Abu-Naser, S.S. Predicting Fire Alarms in Smoke Detection using Neural Networks. Int. J. Acad. Inf. Syst. Res. 2023, 7, 26–33. [Google Scholar]
- Bhamra, J.K.; Anantha Ramaprasad, S.; Baldota, S.; Luna, S.; Zen, E.; Ramachandra, R.; Kim, H.; Schmidt, C.; Arends, C.; Block, J.; et al. Multimodal Wildland Fire Smoke Detection. Remote Sens. 2023, 15, 2790. [Google Scholar] [CrossRef]
- Yang, H.; Zhou, H.; Liu, Z.; Deng, X. Energy Optimization of Wireless Sensor Embedded Cloud Computing Data Monitoring System in 6G Environment. Sensors 2023, 23, 1013. [Google Scholar] [CrossRef]
- Benzekri, W.; El Moussati, A.; Moussaoui, O.; Berrajaa, M. Early Forest Fire Detection System Using Wireless Sensor Network and Deep Learning. Int. J. Adv. Comput. Sci. Appl. 2020, 11. [Google Scholar] [CrossRef]
- Marjani, M.; Ahmadi, S.A.; Mahdianpari, M. FirePred: A Hybrid Multi-Temporal Convolutional Neural Network Model for Wildfire Spread Prediction. Ecol. Inform. 2023, 78. [Google Scholar] [CrossRef]
- Avazov, K.; Hyun, A.E.; Sami S, A.A.; Khaitov, A.; Abdusalomov, A.B.; Cho, Y.I. Forest Fire Detection and Notification Method Based on AI and IoT Approaches. Future Internet 2023, 15, 61. [Google Scholar] [CrossRef]
- Mulligan, R.; Ammari, H.M. Coverage in Wireless Sensor Networks: A Survey. Netw. Protoc. Algorithms 2010, 2, 27–53. [Google Scholar] [CrossRef]
- Abbasi, M.; Abd Latiff, M.S.B.; Chizari, H. An Overview of Distributed Energy-Efficient Topology Control for Wireless Ad Hoc Networks. Math. Probl. Eng. 2013, 2013, 126269. [Google Scholar] [CrossRef]
- Jiang, R. A Review of Network Topology. In Proceedings of the 4th International Conference on Computer, Mechatronics, Control and Electronic Engineering, Hangzhou, China, 28-29 September 2015, Hangzhou, China, 28–29 September 2015; Atlantis Press: Paris, France, 2015; pp. 1167–1170. [Google Scholar]
- Mitchell, H.L.; Cox, S.J.; Lewis, H.G. A Low-Cost Sensor Network for Monitoring Peatland. Sensors 2024, 24, 6019. [Google Scholar] [CrossRef]
- Acharya, G.P.; Poluboyina, L.; Veeragamoorthi, J.; Joydeb, C. An Efficient and Low Cost Realization of LoRa-Based Real-Time Forest Protection System. Indones. J. Electr. Eng. Comput. Sci. 2024, 34, 1452–1462. [Google Scholar] [CrossRef]
- De Rango, A.; Furnari, L.; Cortale, F.; Senatore, A.; Mendicino, G. Wildfire Early Warning System Based on a Smart CO2 Sensors Network. Sensors 2025, 25, 2012. [Google Scholar] [CrossRef] [PubMed]
- Brito, T.; Azevedo, B.F.; Mendes, J.; Zorawski, M.; Fernandes, F.P.; Pereira, A.I.; Rufino, J.; Lima, J.; Costa, P. Data Acquisition Filtering Focused on Optimizing Transmission in a LoRaWAN Network Applied to the WSN Forest Monitoring System. Sensors 2023, 23, 1282. [Google Scholar] [CrossRef] [PubMed]
- Chéour, R.; Jmal, M.W.; Khriji, S.; El Houssaini, D.; Trigona, C.; Abid, M.; Kanoun, O. Towards Hybrid Energy-Efficient Power Management in Wireless Sensor Networks. Sensors 2021, 22, 301. [Google Scholar] [CrossRef]
- Kurose, J.F.; Ross, K.W. Computer Networking: A Top-Down Approach, 8th ed.; Pearson: Boston, MA, USA, 2021. [Google Scholar]
- Riley, G.F.; Henderson, T.R. The ns-3 Network Simulator. In Modeling and Tools for Network Simulation; Wehrle, K., Güneş, M., Gross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Quy, V.K.; Ban, N.T.; Nam, V.H.; Tuan, D.M.; Han, N.D. Survey of Recent Routing Metrics and Protocols for Mobile Ad-Hoc Networks. J. Commun. 2019, 14, 110–120. [Google Scholar] [CrossRef]
- Zeeshan, M.; Ali, A.; Naveed, A.; Liu, A.X.; Wang, A.; Qureshi, H.K. Modeling Packet Loss Probability and Busy Time in Multi-Hop Wireless Networks. EURASIP J. Wirel. Commun. Netw. 2016, 2016, 168. [Google Scholar] [CrossRef]
- Daintree Networks. Getting Started with ZigBee and IEEE 802.15.4; Daintree Networks Inc.: Los Altos, CA, USA, 2008; Available online: https://www.science.smith.edu/~jcardell/Courses/EGR328/Readings/Zigbee%20GettingStarted.pdf (accessed on 22 June 2025).
- Yang, Y.; Wu, R.; Zhang, L.; Zhou, D. An Asynchronous Adaptive Priority Round-Robin Arbiter Based on Four-Phase Dual-Rail Protocol. Chin. J. Electron. 2015, 24, 1–7. [Google Scholar] [CrossRef]
- Oveis-Gharan, M.; Khan, G.N. Index-Based Round-Robin Arbiter for NoC Routers. In Proceedings of the 2015 IEEE Computer Society Annual Symposium on VLSI, Montpellier, France, 8–10 July 2015; pp. 62–67. [Google Scholar] [CrossRef]
- Monemi, A.; Ooi, C.Y.; Palesi, M.; Marsono, M.N. Ping-Lock Round Robin Arbiter. Microelectron. J. 2017, 63, 81–93. [Google Scholar] [CrossRef]
- Parvathi, S.; Umamaheswari, S. Load Based Dynamic Priority Arbiter for NoC Architecture. J. Sci. Ind. Res. 2022, 81, 495–504. [Google Scholar] [CrossRef]
- Naqvi, S.R.; Akram, T.; Haider, S.A.; Kamran, M. Artificial Neural Networks Based Dynamic Priority Arbitration for Asynchronous Flow Control. Neural Comput. Appl. 2018, 29, 627–637. [Google Scholar] [CrossRef]
- Dobkin, R.; Ginosar, R.; Kolodny, A. QNoC Asynchronous Router. Integration 2009, 42, 103–115. [Google Scholar] [CrossRef]
- Younis, M.; Bushra, S. Efficient Distributed Medium Access Arbitration for Multi-Channel Wireless Sensor Networks. In Proceedings of the 2007 IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 3666–3671. [Google Scholar] [CrossRef]
- Khalaf, O.I.; Romero, C.A.T.; Hassan, S.; Iqbal, M.T. Mitigating Hotspot Issues in Heterogeneous Wireless Sensor Networks. J. Sens. 2022, 2022, 7909472. [Google Scholar] [CrossRef]
- Hussain, K.; Xia, Y.; Onaizah, A.N. Starvation Mitigation and Priority Aware of CSMA/CA in WSN with Implementing Markov Chain Model. Optik 2022, 271, 170186. [Google Scholar] [CrossRef]
- Yang, P.T.; Chen, C.J. Conflict Detection in Interval-Based Sequences from Wireless Sensor Networks. In Proceedings of the 2017 International Conference on Information Technology, New York, NY, USA, 27–29 December 2017; pp. 263–267. [Google Scholar] [CrossRef]
- Ying, B.; Liu, W.; Liu, Y.; Yang, H.; Wang, H. Energy-Efficient Node-Level Compression Arbitration for Wireless Sensor Networks. In Proceedings of the 2009 11th IEEE International Conference on Advanced Communication Technology, Gangwon-Do, Republic of Korea, 15–18 February 2009; Volume 1, pp. 564–568. [Google Scholar]
- Wang, L.; Zhao, Q.; Wen, Z.; Qu, J. RAFFIA: Short-Term Forest Fire Danger Rating Prediction via Multiclass Logistic Regression. Sustainability 2018, 10, 4620. [Google Scholar] [CrossRef]
- Alahmari, B. Predicting Weather in Saudi Arabia by Using Machine Learning. Medium 2022. Available online: https://medium.com/@Bashayer_Alahmari/predicting-weather-in-saudi-arabia-by-using-machine-learning-30317fe1dcf5 (accessed on 22 June 2025).
- Van Wagner, C.E. Development and Structure of the Canadian Forest Fire Weather Index System; Canadian Forestry Service: Ottawa, ON, Canada, 1987. [Google Scholar]
- Mehdi, K.; Lounis, M.; Bounceur, A.; Kechadi, T. CupCarbon: A Multi-Agent and Discrete Event Wireless Sensor Network Design and Simulation Tool. In Proceedings of the 7th International ICST Conference on Simulation Tools and Techniques, Lisbon, Portugal, 17–19 March 2014. [Google Scholar] [CrossRef]
- Xuejun, W. Design and Simulation of Wireless Environment Monitor Based on Proteus. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 2102–2105. [Google Scholar] [CrossRef]
- Sonawane, R.N.; Ghule, A.S.; Bowlekar, A.P.; Zakane, A.H. Design and Development of Temperature and Humidity Monitoring System. Agric. Sci. Dig. 2019, 39, 114–118. [Google Scholar] [CrossRef]
- Chamorro Atalaya, O.; Arce Santillan, D. Fire Alert System through Text Messages, with Arduino Mega Technology and GSM SIM 900 Module. Indones. J. Electr. Eng. Comput. Sci. 2020, 18, 1215–1221. [Google Scholar] [CrossRef]
- Camilo, T.; Rodrigues, A.; Silva, J.S.; Boavida, F. Redes de Sensores Sem Fios, Considerações sobre a Sua Instalação em Ambiente Real. In Proceedings of the Wireless Sensor Networks—Some Considerations on Deployment in Real Environments, CSMU2006, Guimarães, Portugal, 26–28 October 2006. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A.P.; Balakrishnan, H. Energy-Efficient Communication Protocol for Wireless Microsensor Networks (LEACH). In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UH | ID | Priority Level | Temperature | Humidity |
|---|---|---|---|---|
| 2 bytes | 2 bytes | 1 byte | 1 byte | 1 byte |
| Configuration | Nodes | Latency (s) | Total PLR (%) | Energy (W) | Accuracy (%) |
|---|---|---|---|---|---|
| Baseline (Mesh 2D) | 104 | 7.2 | 91.3 | 0.092 | 76.5 |
| +Hybrid Topology (Non-dense) | 49 | 3.1 (−57%) | 79.8 | 0.062 (−33%) | 76.5 |
| +Adaptive Routing | 49 | 1.8 (−75%) | 70.5 | 0.070 | 76.5 |
| +Dynamic Arbitration | 49 | 1.8 | 68.1 (−3.6%) | 0.069 | 76.5 |
| +AI Risk Prediction | 49 | 1.8 | 68.1 | 0.069 | 99.97 |
| Reference | Node Count | Topology | Covered Area (km2) | Node Spacing (m) | PLR/Node | Avg. Power/Node (W) | Total Power (W) |
|---|---|---|---|---|---|---|---|
| Proposed | 24 | Star/Circular | 0.2826 | 100 | 2.08% | 0.003 | 0.0718 |
| Farej et al. (2015) [6] | 300 (avg) | 2D Mesh | 2.5 (avg) | 50–100 | 7.2% | 0.255 | 76.5 |
| Kaur et al. (2023) [11] | 200 | Hierarchical Tree | 4–6 | 100–150 | ≤2% | 0.210 | 42.0 |
| Alvares et al. (2021) [15] | 30 | Star | 5 | 200–300 | 1.8% | 0.120 | 3.6 |
| Varela et al. (2020) [25] | 50 | Star | 1 | 100 | 1.2% | 0.180 | 9.0 |
| Zeeshan et al. (2016) [43] | 500 (avg) | Multi-hop Mesh | 15 (avg) | 50–100 | 10% | 0.300 | 150.0 |
| Khalaf et al. (2022) [52] | 300 | Heterogeneous Mesh | 8 | 100 | 2.5% | 0.240 | 72.0 |
| Ying et al. (2009) [55] | 100 | Cluster Tree | 2 | 100–150 | 2% | 0.210 | 21.0 |
| Heinzelman et al. (2000) [64] | 100 | Dynamic Cluster | 1–2 | 50 | ≤5% | 0.180 | 18.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almarri, S.; Al Safwan, H.; Al Qisoom, S.; Gdaim, S.; Zitouni, A. Optimized Wireless Sensor Network Architecture for AI-Based Wildfire Detection in Remote Areas. Fire 2025, 8, 245. https://doi.org/10.3390/fire8070245
Almarri S, Al Safwan H, Al Qisoom S, Gdaim S, Zitouni A. Optimized Wireless Sensor Network Architecture for AI-Based Wildfire Detection in Remote Areas. Fire. 2025; 8(7):245. https://doi.org/10.3390/fire8070245
Chicago/Turabian StyleAlmarri, Safiah, Hur Al Safwan, Shahd Al Qisoom, Soufien Gdaim, and Abdelkrim Zitouni. 2025. "Optimized Wireless Sensor Network Architecture for AI-Based Wildfire Detection in Remote Areas" Fire 8, no. 7: 245. https://doi.org/10.3390/fire8070245
APA StyleAlmarri, S., Al Safwan, H., Al Qisoom, S., Gdaim, S., & Zitouni, A. (2025). Optimized Wireless Sensor Network Architecture for AI-Based Wildfire Detection in Remote Areas. Fire, 8(7), 245. https://doi.org/10.3390/fire8070245