


An Image-Based Fire Monitoring Algorithm Resistant to Fire-like Objects



Abstract
:1. Introduction
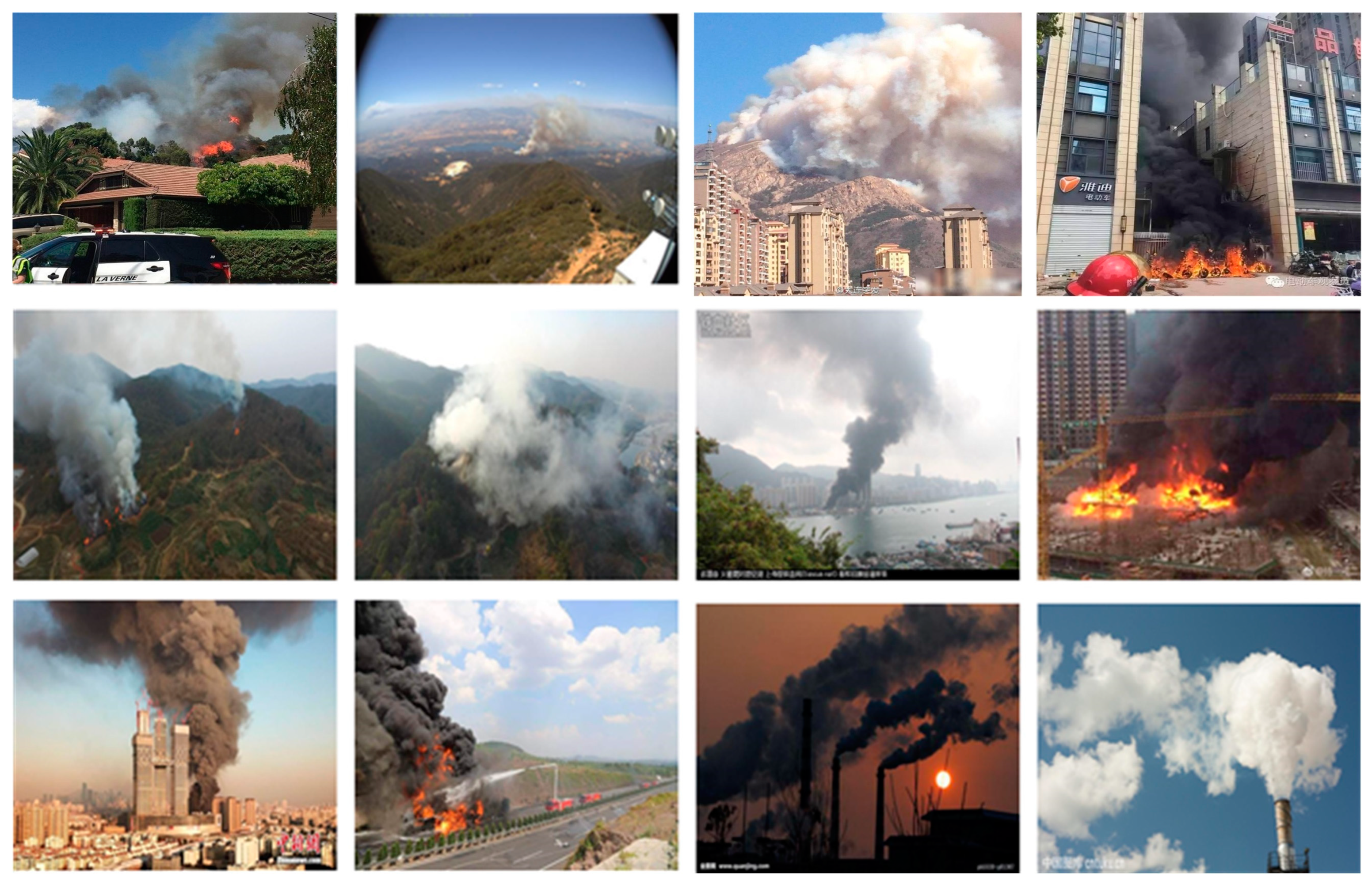
- A dataset comprising 5274 fire (smoke and flame) images and 726 typical fire-like object (chimney emissions and clouds) images;
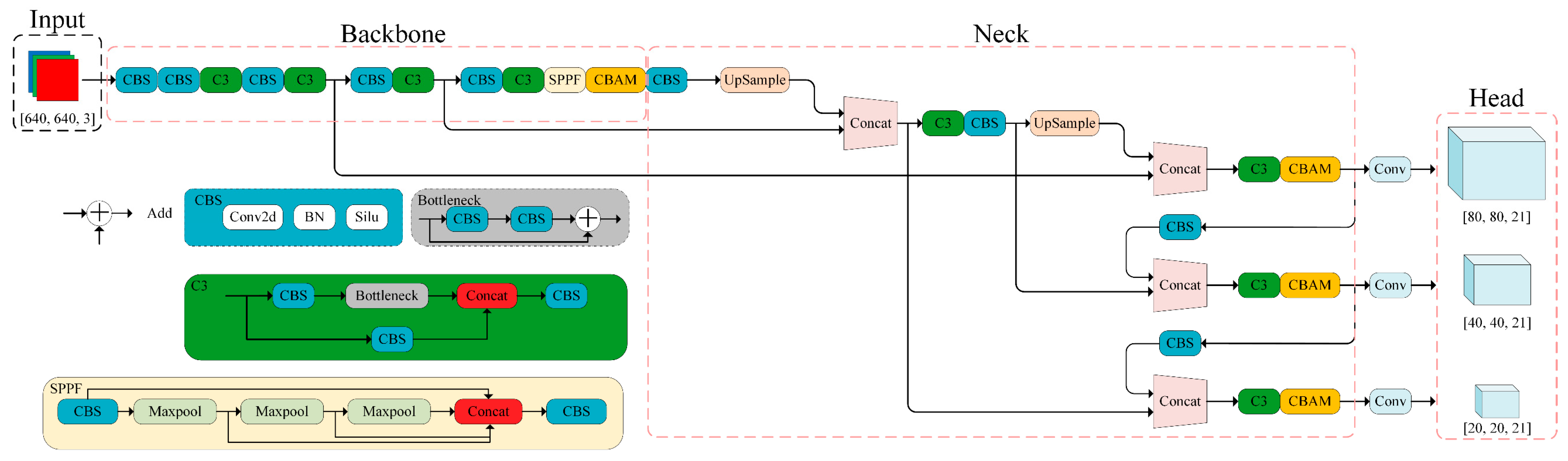
- Proposing an improved YOLOv5 fire detection algorithm for anti-interference. We added the Convolutional Block Attention Module (CBAM) to the end of the Neck module to improve the network’s feature extraction ability. Meanwhile, the C3 modules were replaced by the C2f module, which provided better feature gradient flow;
- Enhanced accuracy: The proposed approach may improve the accuracy of fire detection in open spaces compared to traditional methods. This accuracy may be achieved by leveraging the strengths of deep learning algorithms such as YOLOv5 to perceive and identify fire-specific features, which are challenging to identify using traditional image processing methods;
- Real-time detection: The YOLOv5 algorithm provides high speed and a real-time objection detection ability. Thus, the proposed approach is suitable for open-space scenarios where quick and timely fire detection is crucial;
- Reduced false alarms: Deep learning technology provides a powerful ability to extract fire features and typical fire-like objects. The proposed approach reduces the frequent false alarms that are prevalent with traditional fire detection methods. This method can prevent unnecessary emergency responses and reduce costs related to false alarms;
- Cost-effective: the proposed approach is more economically feasible than traditional fire detection methods because of its compatibility with low-cost cameras and hardware, reducing the need for expensive fire detection systems.
2. Materials and Methods
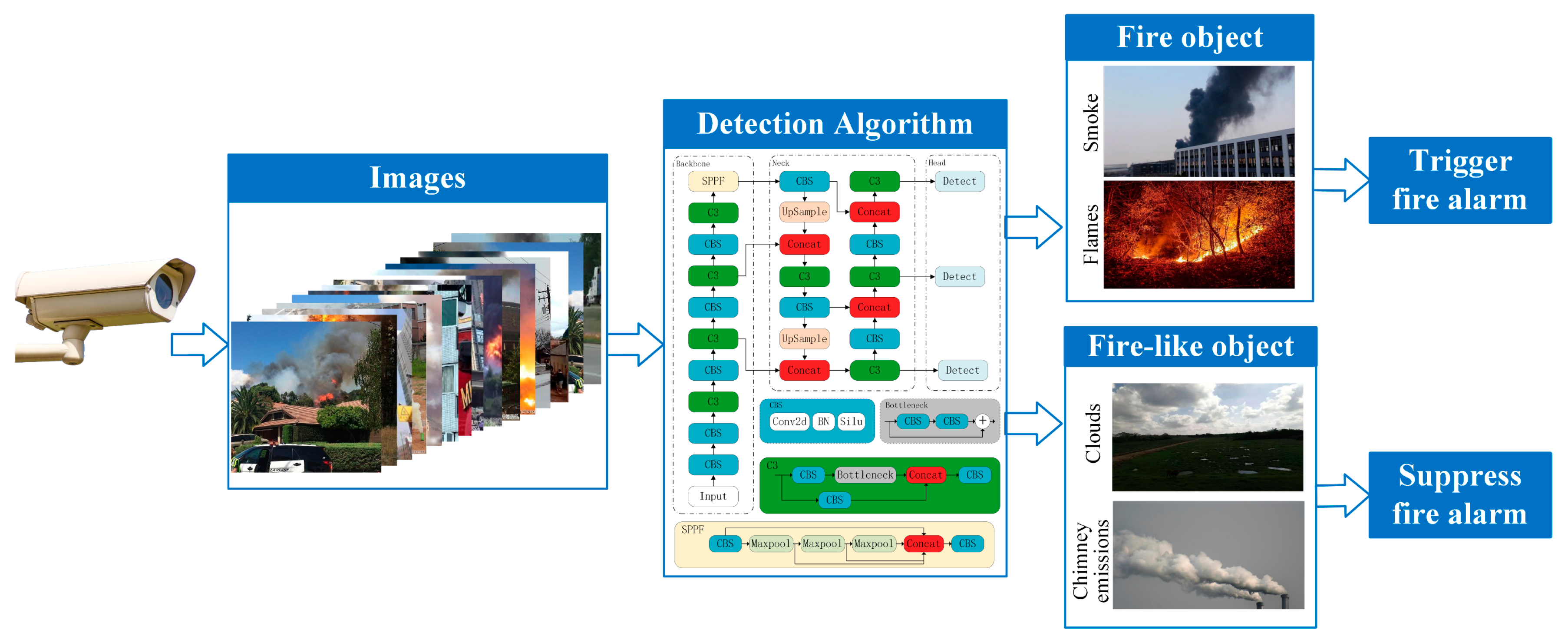
2.1. Anti-Interference Fire Detection Method for Open Spaces
2.2. Dataset Preparation and Pre-Processing
2.3. Network Design
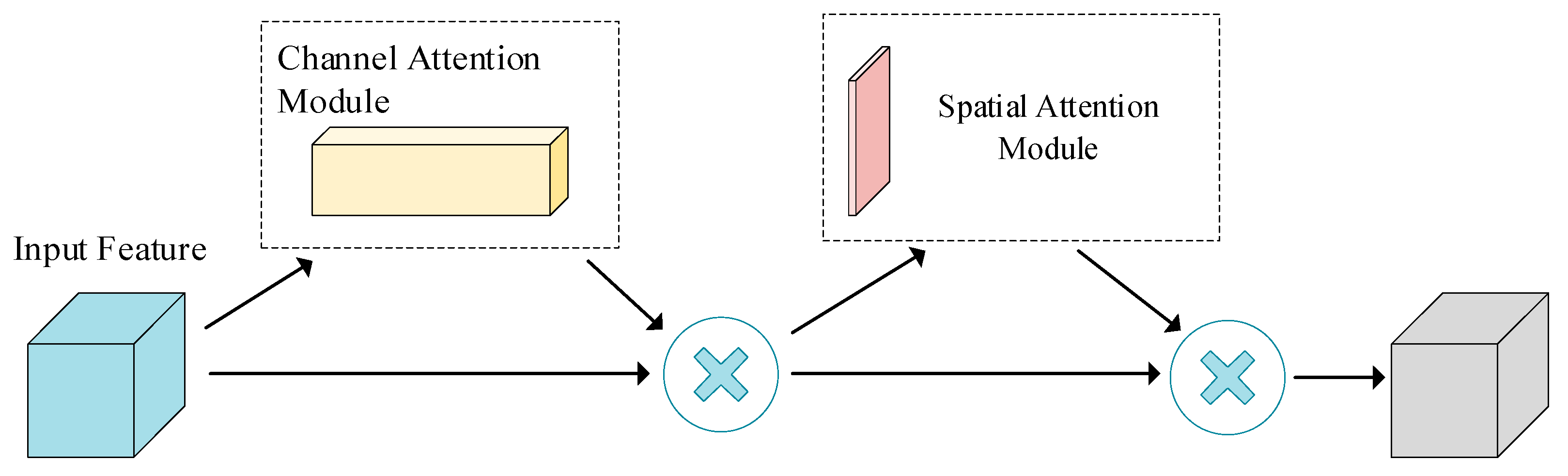
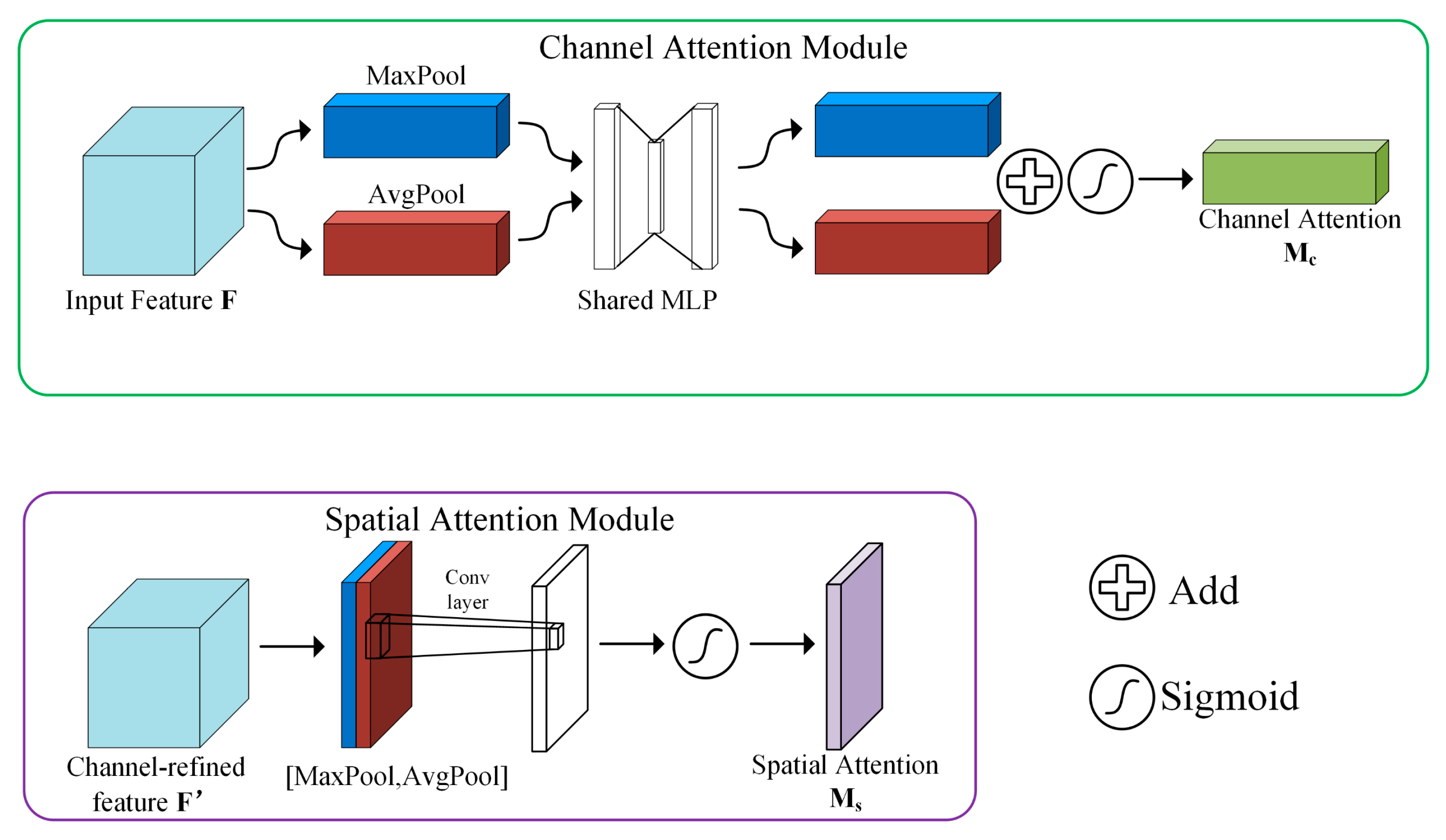
2.3.1. Attention Mechanism Using Convolutional Block Attention Module (CBAM)
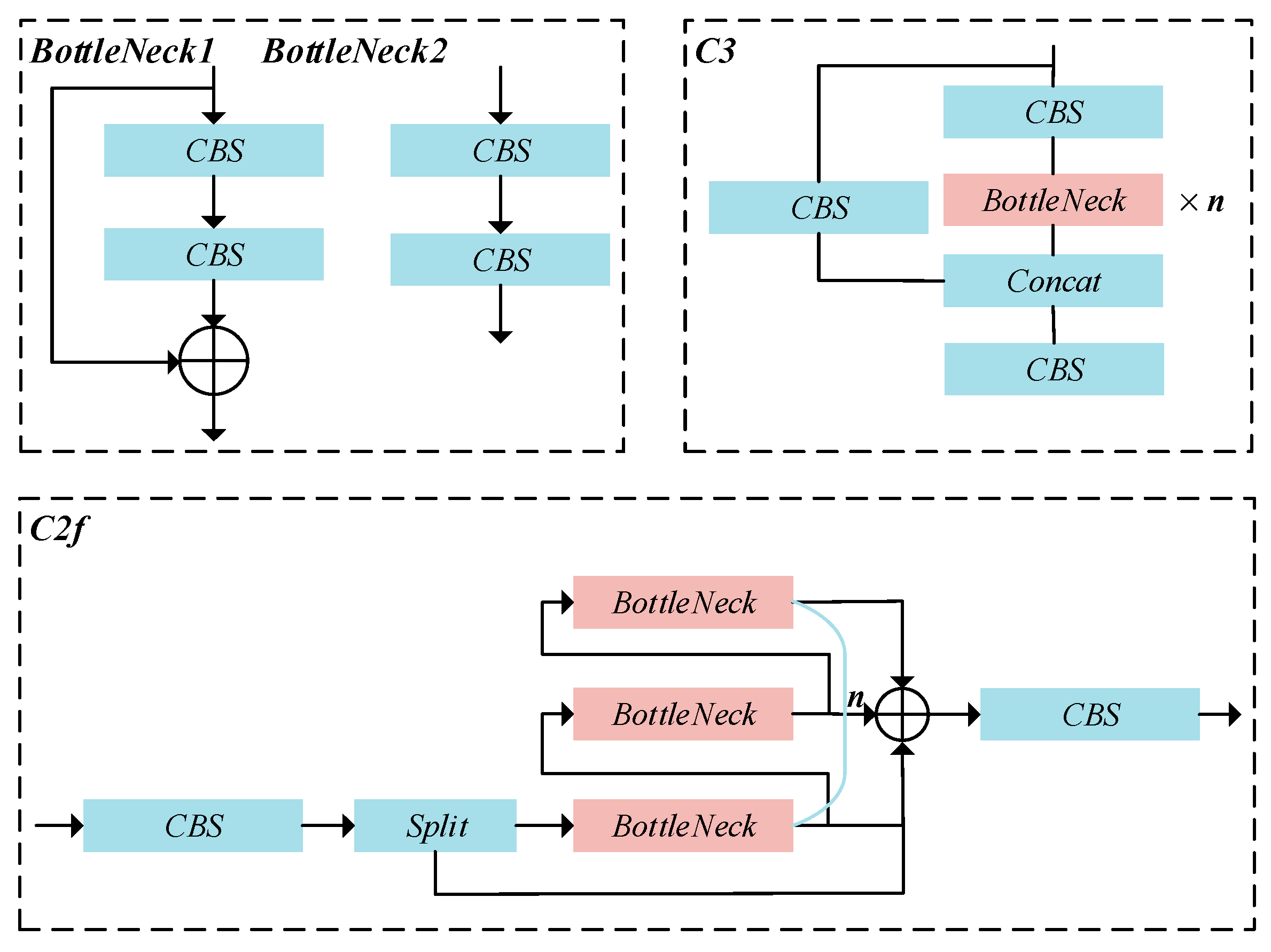
2.3.2. Replacing the C3 Module with the C2f Module
2.4. Network Training
2.5. Evaluation Metrics
3. Results
3.1. Object Detection Network Comparison Experiment Results
3.2. Contrast Experiment Results after Introducing Attention Mechanism and C2f Module
3.3. Fire-like Data Labeling Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Aryal, J. Forest Fire Susceptibility and Risk Mapping Using Social/Infrastructural Vulnerability and Environmental Variables. Fire 2019, 2, 50. [Google Scholar] [CrossRef]
- Talaat, F.M.; ZainEldin, H. An improved fire detection approach based on YOLO-v8 for smart cities. Neural Comput. Appl. 2023, 35, 20939–20954. [Google Scholar] [CrossRef]
- Avazov, K.; Mukhiddinov, M.; Makhmudov, F.; Cho, Y.I. Fire Detection Method in Smart City Environments Using a Deep-Learning-Based Approach. Electronics 2021, 11, 73. [Google Scholar] [CrossRef]
- Zhang, L.; Li, J.M.; Zhang, F.Q. An Efficient Forest Fire Target Detection Model Based on Improved YOLOv5. Fire 2023, 6, 291. [Google Scholar] [CrossRef]
- Kim, S.Y.; Muminov, A. Forest Fire Smoke Detection Based on Deep Learning Approaches and Unmanned Aerial Vehicle Images. Sensors 2023, 23, 5702. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Squicciarino, G.; Fiori, E.; Negro, D.; Gollini, A.; Puca, S. Near real-time generation of a country-level burned area database for Italy from Sentinel-2 data and active fire detections. Remote Sens. Appl. Soc. Environ. 2023, 29, 100925. [Google Scholar] [CrossRef]
- Farhadi, H.; Ebadi, H.; Kiani, A. Badi: A Novel Burned Area Detection Index for SENTINEL-2 Imagery Using Google Earth Engine Platform. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, 10, 179–186. [Google Scholar] [CrossRef]
- Rostami, A.; Shah-Hosseini, R.; Asgari, S.; Zarei, A.; Aghdami-Nia, M.; Homayouni, S. Active Fire Detection from Landsat-8 Imagery Using Deep Multiple Kernel Learning. Remote Sens. 2022, 14, 992. [Google Scholar] [CrossRef]
- Chen, T.H.; Yin, Y.H.; Huang, S.F.; Ye, Y.T. The smoke detection for early fire-alarming system base on video processing. In Proceedings of the Iih-Msp: 2006 International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Pasadena, CA, USA, 18–20 December 2006; pp. 427–430. [Google Scholar]
- Toreyin, B.U.; Dedeoglu, Y.; Gudukbay, U.; Cetin, A.E. Computer vision based method for real-time fire and flame detection. Pattern Recognit. Lett. 2006, 27, 49–58. [Google Scholar] [CrossRef]
- Yuan, F. A fast accumulative motion orientation model based on integral image for video smoke detection. Pattern Recognit. Lett. 2008, 29, 925–932. [Google Scholar] [CrossRef]
- Dimitropoulos, K.; Barmpoutis, P.; Grammalidis, N. Spatio-Temporal Flame Modeling and Dynamic Texture Analysis for Automatic Video-Based Fire Detection. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 339–351. [Google Scholar] [CrossRef]
- Hu, G.L.; Jiang, X. Early Fire Detection of Large Space Combining Thresholding with Edge Detection Techniques. Appl. Mech. Mater. 2010, 44–47, 2060–2064. [Google Scholar] [CrossRef]
- Singh, Y.K.; Deb, D. Detection of Fire Regions from a Video Image Frames in YCbCr Color Model. Int. J. Recent Technol. Eng. 2019, 8, 6082–6087. [Google Scholar] [CrossRef]
- Wu, Z.S.; Xue, R.; Li, H. Real-Time Video Fire Detection via Modified YOLOv5 Network Model. Fire Technol. 2022, 58, 2377–2403. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, Y.M.; Zhang, Q.X.; Lin, G.H.; Wang, Z.; Jia, Y.; Wang, J.J. Video smoke detection based on deep saliency network. Fire Saf. J. 2019, 105, 277–285. [Google Scholar] [CrossRef]
- Kim, Y.H.; Kim, A.; Jeong, H.Y. RGB Color Model Based the Fire Detection Algorithm in Video Sequences on Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2014, 10, 923609. [Google Scholar] [CrossRef]
- Gunay, O.; Toreyin, B.U.; Kose, K.; Cetin, A.E. Entropy-Functional-Based Online Adaptive Decision Fusion Framework With Application to Wildfire Detection in Video. IEEE Trans. Image Process. 2012, 21, 2853–2865. [Google Scholar] [CrossRef]
- Celik, T.; Demirel, H. Fire detection in video sequences using a generic color model. Fire Saf. J. 2009, 44, 147–158. [Google Scholar] [CrossRef]
- Qiu, J.; Wang, H.; Shen, W.J.; Zhang, Y.L.; Su, H.Y.; Li, M.S. Quantifying Forest Fire and Post-Fire Vegetation Recovery in the Daxin’anling Area of Northeastern China Using Landsat Time-Series Data and Machine Learning. Remote Sens. 2021, 13, 792. [Google Scholar] [CrossRef]
- Chanthiya, P.; Kalaivani, V. Forest fire detection on LANDSAT images using support vector machine. Concurr. Comput. Pract. Exp. 2021, 33, e6280. [Google Scholar] [CrossRef]
- Zheng, H.T.; Duan, J.C.; Dong, Y.; Liu, Y. Real-time fire detection algorithms running on small embedded devices based on MobileNetV3 and YOLOv4. Fire Ecol. 2023, 19, 31. [Google Scholar] [CrossRef]
- Zhao, Y.C.; Wu, S.L.; Wang, Y.R.; Chen, H.D.; Zhang, X.Y.; Zhao, H.W. Fire Detection Algorithm Based on an Improved Strategy of YOLOv5 and Flame Threshold Segmentation. Comput. Mater. Contin. 2023, 75, 5639–5657. [Google Scholar] [CrossRef]
- Yar, H.; Khan, Z.A.; Ullah, F.U.M.; Ullah, W.; Baik, S.W. A modified YOLOv5 architecture for efficient fire detection in smart cities. Expert Syst. Appl. 2023, 231, 120465. [Google Scholar] [CrossRef]
- Xie, J.; Pang, Y.W.; Pan, J.; Nie, J.; Cao, J.L.; Han, J.G. Complementary Feature Pyramid Network for Object Detection. ACM Trans. Multimed. Comput. Commun. Appl. 2023, 19, 178. [Google Scholar] [CrossRef]
- Sathishkumar, V.E.; Cho, J.H.Y.; Subramanian, M.; Naren, O.S. Forest fire and smoke detection using deep learning-based learning without forgetting. Fire Ecol. 2023, 19, 9. [Google Scholar] [CrossRef]
- Frizzi, S.; Kaabi, R.; Bouchouicha, M.; Ginoux, J.M.; Moreau, E.; Fnaiech, F. Convolutional Neural Network for Video Fire and Smoke Detection. In Proceedings of the IEEE Industrial Electronics Society Conference, Florence, Italy, 23–26 October 2016; pp. 877–882. [Google Scholar]
- Xu, R.J.; Lin, H.F.; Lu, K.J.; Cao, L.; Liu, Y.F. A Forest Fire Detection System Based on Ensemble Learning. Forests 2021, 12, 217. [Google Scholar] [CrossRef]
- Kim, B.; Lee, J. A Video-Based Fire Detection Using Deep Learning Models. Appl. Sci. 2019, 9, 2862. [Google Scholar] [CrossRef]
- Khan, S.; Khan, A. FFireNet: Deep Learning Based Forest Fire Classification and Detection in Smart Cities. Symmetry 2022, 14, 2155. [Google Scholar] [CrossRef]
- Barmpoutis, P.; Stathaki, T.; Dimitropoulos, K.; Grammalidis, N. Early Fire Detection Based on Aerial 360-Degree Sensors, Deep Convolution Neural Networks and Exploitation of Fire Dynamic Textures. Remote Sens. 2020, 12, 3177. [Google Scholar] [CrossRef]
- Liu, H.Q.; Hu, H.P.; Zhou, F.; Yuan, H.P. Forest Flame Detection in Unmanned Aerial Vehicle Imagery Based on YOLOv5. Fire 2023, 6, 279. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W.D. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Abdusalomov, A.; Baratov, N.; Kutlimuratov, A.; Whangbo, T.K. An Improvement of the Fire Detection and Classification Method Using YOLOv3 for Surveillance Systems. Sensors 2021, 21, 6519. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wu, L.; Li, T.; Shi, P.B. A Smoke Detection Model Based on Improved YOLOv5. Mathematics 2022, 10, 1190. [Google Scholar] [CrossRef]
- Mseddi, W.S.; Ghali, R.; Jmal, M.; Attia, R. Fire Detection and Segmentation using YOLOv5 and U-NET. In Proceedings of the 2021 29th European Signal Processing Conference (EUSIPCO), Dublin, Ireland, 23–27 August 2021; pp. 741–745. [Google Scholar]
- Huang, Z.C.; Wang, J.L.; Fu, X.S.; Yu, T.; Guo, Y.Q.; Wang, R.T. DC-SPP-YOLO: Dense connection and spatial pyramid pooling based YOLO for object detection. Inf. Sci. 2020, 522, 241–258. [Google Scholar] [CrossRef]
- Zhang, Q.-X.; Lin, G.-H.; Zhang, Y.-M.; Xu, G.; Wang, J.-J. Wildland Forest Fire Smoke Detection Based on Faster R-CNN using Synthetic Smoke Images. Procedia Eng. 2018, 211, 441–446. [Google Scholar] [CrossRef]
- Huang, J.R.; He, Z.L.; Guan, Y.W.; Zhang, H.G. Real-Time Forest Fire Detection by Ensemble Lightweight YOLOX-L and Defogging Method. Sensors 2023, 23, 1894. [Google Scholar] [CrossRef] [PubMed]
- Chino, D.Y.T.; Avalhais, L.P.S.; Rodrigues, J.F.; Traina, A.J.M. BoWFire: Detection of Fire in Still Images by Integrating Pixel Color and Texture Analysis. In Proceedings of the 2015 28th SIBGRAPI Conference on Graphics, Patterns and Images, Salvador, Brazil, 26–29 August 2015; pp. 95–102. [Google Scholar] [CrossRef]
- Wu, S.Y.; Zhang, X.R.; Liu, R.Q.; Li, B.H. A dataset for fire and smoke object detection. Multimed Tools Appl. 2023, 82, 6707–6726. [Google Scholar] [CrossRef]
- Jin, C.T.; Wang, T.; Alhusaini, N.; Zhao, S.H.; Liu, H.L.; Xu, K.; Zhang, J.; Chen, T. Video Fire Detection Methods Based on Deep Learning: Datasets, Methods, and Future Directions. Fire 2023, 6, 315. [Google Scholar] [CrossRef]
- Khan, A.; Hassan, B.; Khan, S.; Ahmed, R.; Abuassba, A. DeepFire: A Novel Dataset and Deep Transfer Learning Benchmark for Forest Fire Detection. Mob. Inf. Syst. 2022, 2022, 5358359. [Google Scholar] [CrossRef]
- Jiang, K.L.; Xie, T.Y.; Yan, R.; Wen, X.; Li, D.Y.; Jiang, H.B.; Jiang, N.; Feng, L.; Duan, X.L.; Wang, J.J. An Attention Mechanism-Improved YOLOv7 Object Detection Algorithm for Hemp Duck Count Estimation. Agriculture 2022, 12, 1659. [Google Scholar] [CrossRef]
- Xie, X.A.; Chen, K.; Guo, Y.R.; Tan, B.T.; Chen, L.M.; Huang, M. A Flame-Detection Algorithm Using the Improved YOLOv5. Fire 2023, 6, 313. [Google Scholar] [CrossRef]
- Niu, Z.Y.; Zhong, G.Q.; Yu, H. A review on the attention mechanism of deep learning. Neurocomputing 2021, 452, 48–62. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Learning Rate | 0.01 | Weight Decay | 0.0005 |
| Batch Size | 16 | Momentum | 0.937 |
| Image Size | 640 × 640 | Epochs | 300 |
| Network | P (%) | R (%) | mAP@50 (%) | FPS |
|---|---|---|---|---|
| Faster RCNN | 80.13 | 79.05 | 80.11 | 29 |
| SSD | 73.15 | 71.11 | 72.14 | 55 |
| RetinaNet | 76.71 | 78.83 | 78.59 | 25 |
| YOLOv3 | 78.62 | 77.25 | 78.50 | 67 |
| YOLOv4 | 80.19 | 78.03 | 80.21 | 45 |
| YOLOv5n | 80.04 | 77.81 | 79.64 | 153 |
| YOLOv5s | 80.11 | 77.98 | 79.69 | 135 |
| Group | CBAM | C2f | P (%) | R (%) | mAP@50 (%) | FPS |
|---|---|---|---|---|---|---|
| 1 | × | × | 80.04 | 77.81 | 79.64 | 153 |
| 2 | √ | × | 81.83 | 80.76 | 81.73 | 139 |
| 3 | × | √ | 80.61 | 81.14 | 80.99 | 147 |
| 4 | √ | √ | 81.73 | 82.51 | 82.36 | 135 |
| With Label Information | Without Label Information | |||
|---|---|---|---|---|
| Smoke | Flame | Smoke | Flame | |
| Chimney emissions | 3.17% | 0.53% | 18.52% | 2.65% |
| Clouds | 2.18% | 0.27% | 9.96% | 4.37% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Zhang, X.; Deng, T.; Xu, W. An Image-Based Fire Monitoring Algorithm Resistant to Fire-like Objects. Fire 2024, 7, 3. https://doi.org/10.3390/fire7010003
Xu F, Zhang X, Deng T, Xu W. An Image-Based Fire Monitoring Algorithm Resistant to Fire-like Objects. Fire. 2024; 7(1):3. https://doi.org/10.3390/fire7010003
Chicago/Turabian StyleXu, Fang, Xi Zhang, Tian Deng, and Wenbo Xu. 2024. "An Image-Based Fire Monitoring Algorithm Resistant to Fire-like Objects" Fire 7, no. 1: 3. https://doi.org/10.3390/fire7010003
APA StyleXu, F., Zhang, X., Deng, T., & Xu, W. (2024). An Image-Based Fire Monitoring Algorithm Resistant to Fire-like Objects. Fire, 7(1), 3. https://doi.org/10.3390/fire7010003