Ant Lion Optimized Fractional Order Fuzzy Pre-Compensated Intelligent Pid Controller for Frequency Stabilization of Interconnected Multi-Area Power Systems


Abstract
:1. Introduction
- A new application for the FOFP-iPID controller is proposed for the LFC strategy.
- The SFs of the controllers are adjusted employing the ALO algorithm.
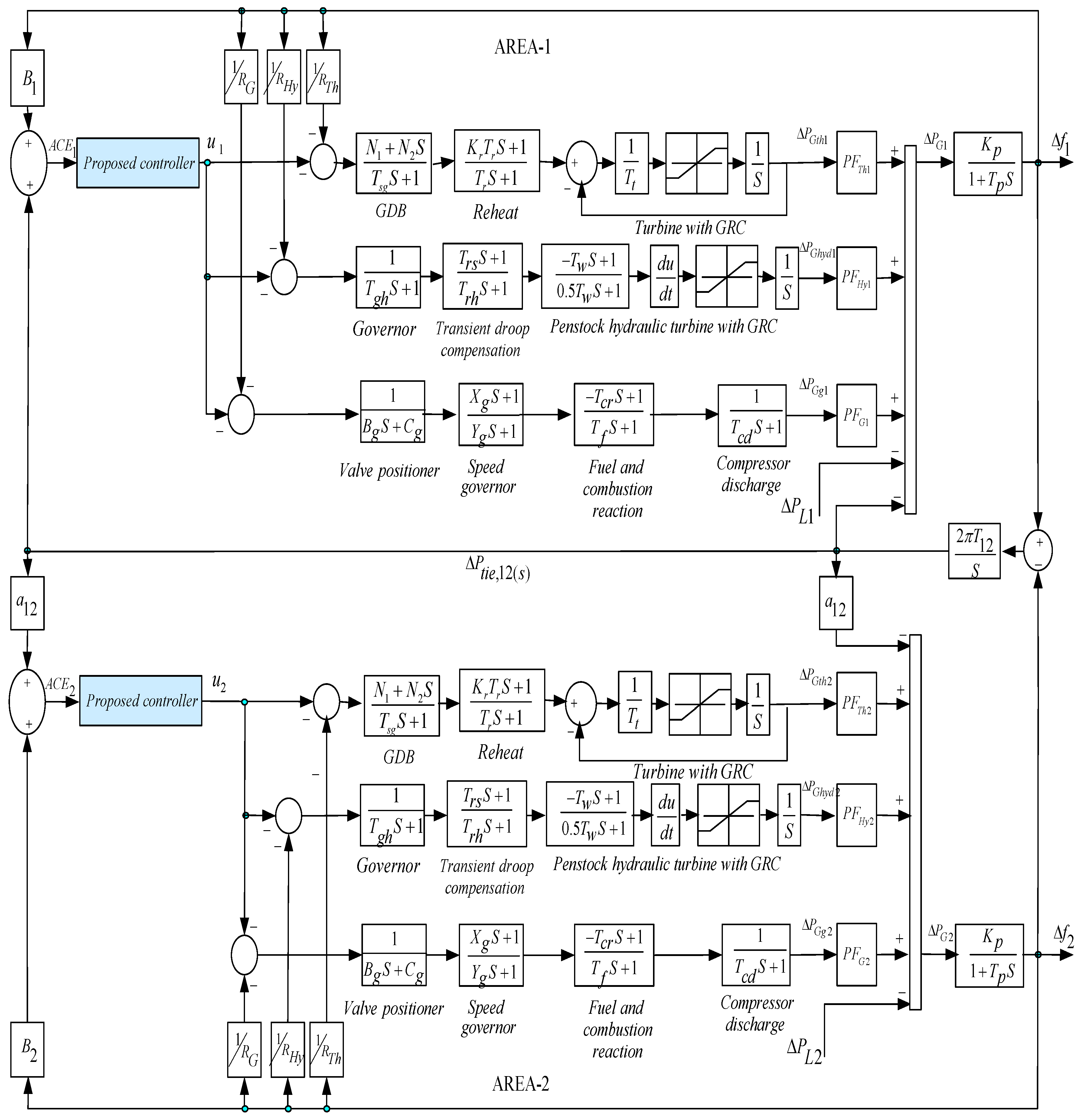
- The proposed FOFP-iPID controller is evaluated on an interconnected two-area power system in which the physical constraints are taken into account for challenging realization.
- The performance of the suggested controller is evaluated by comparing the results with other controllers, such as FOiPD and FOPID controllers for the same plant [17].
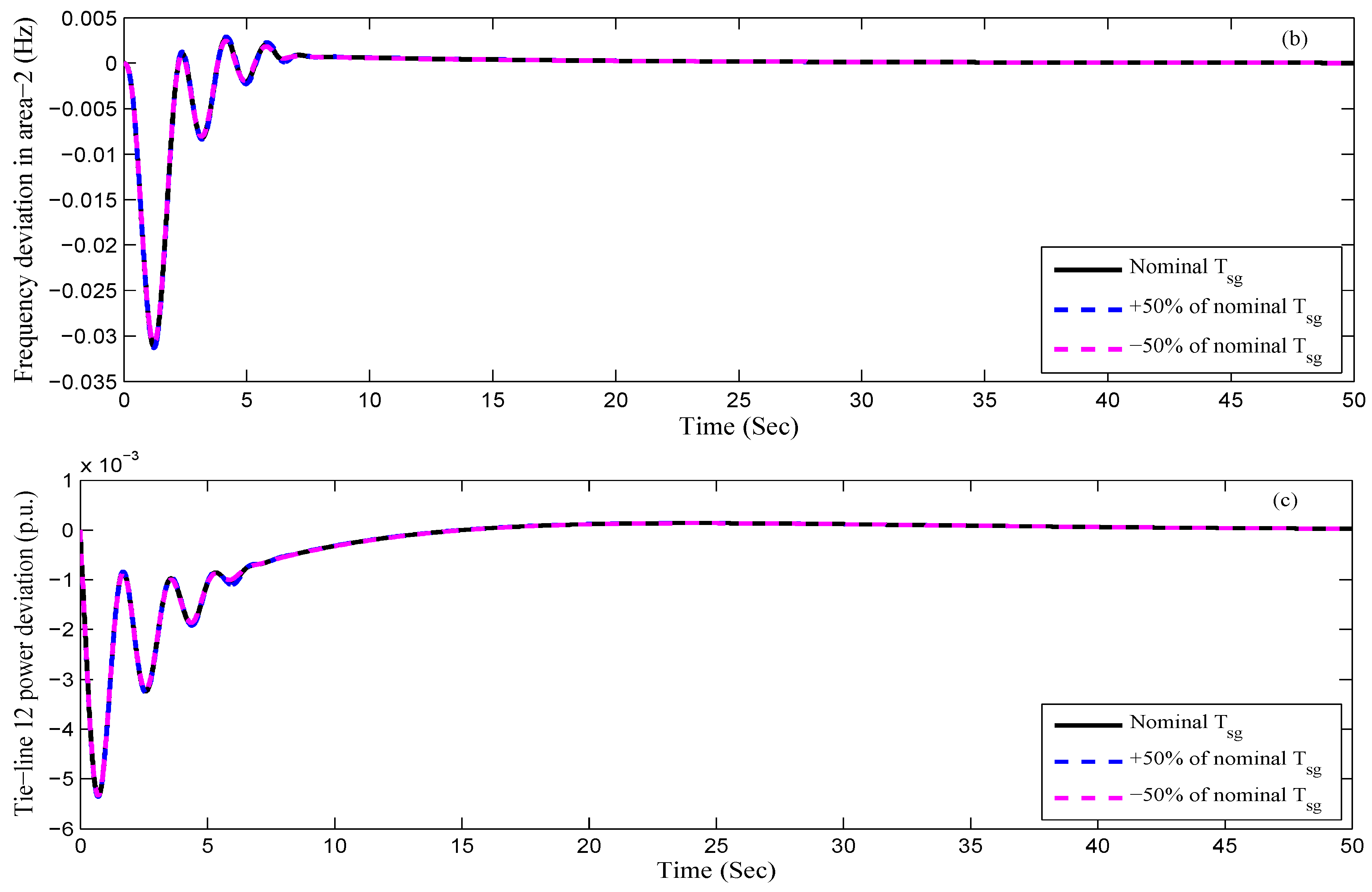
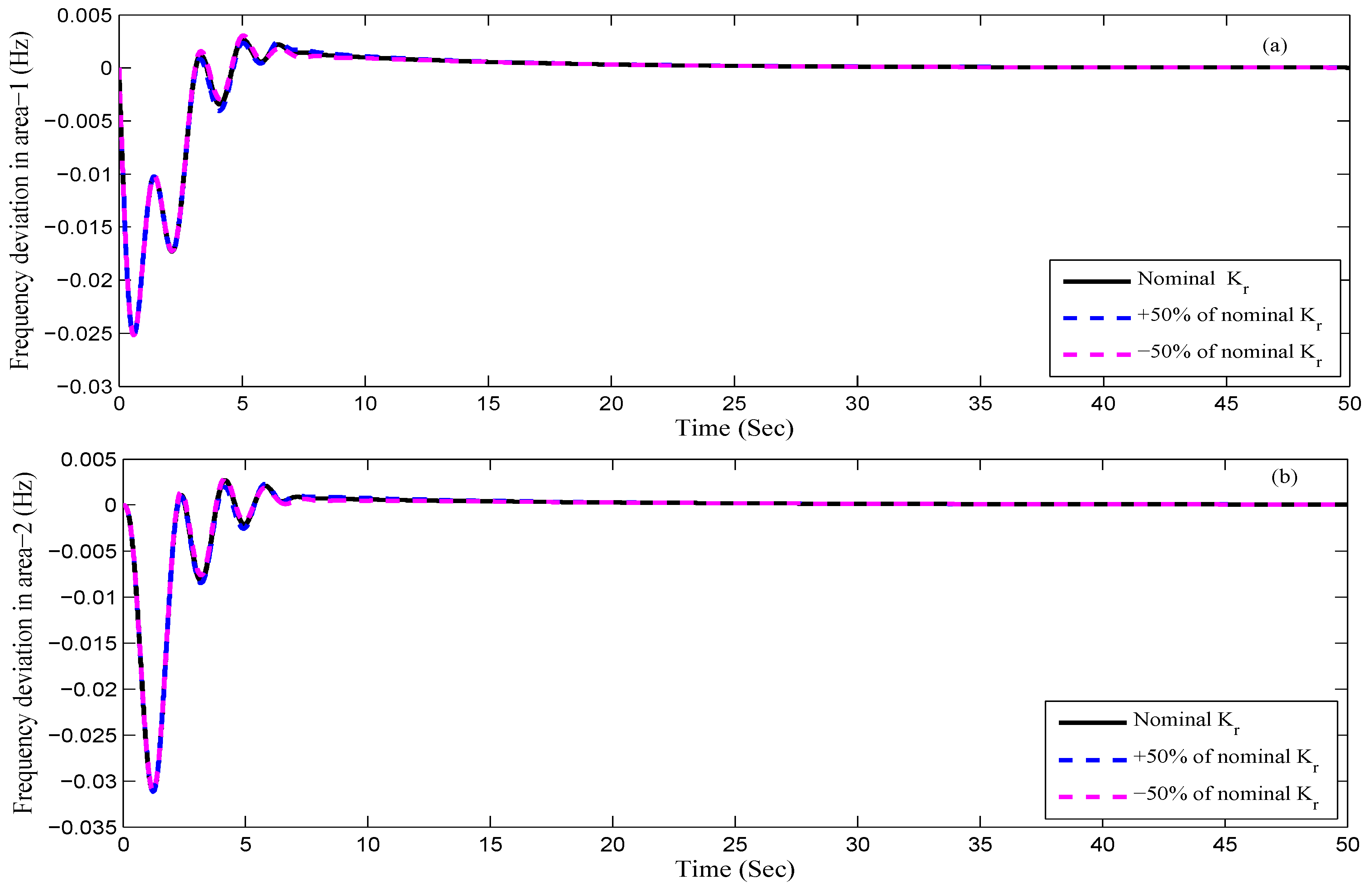
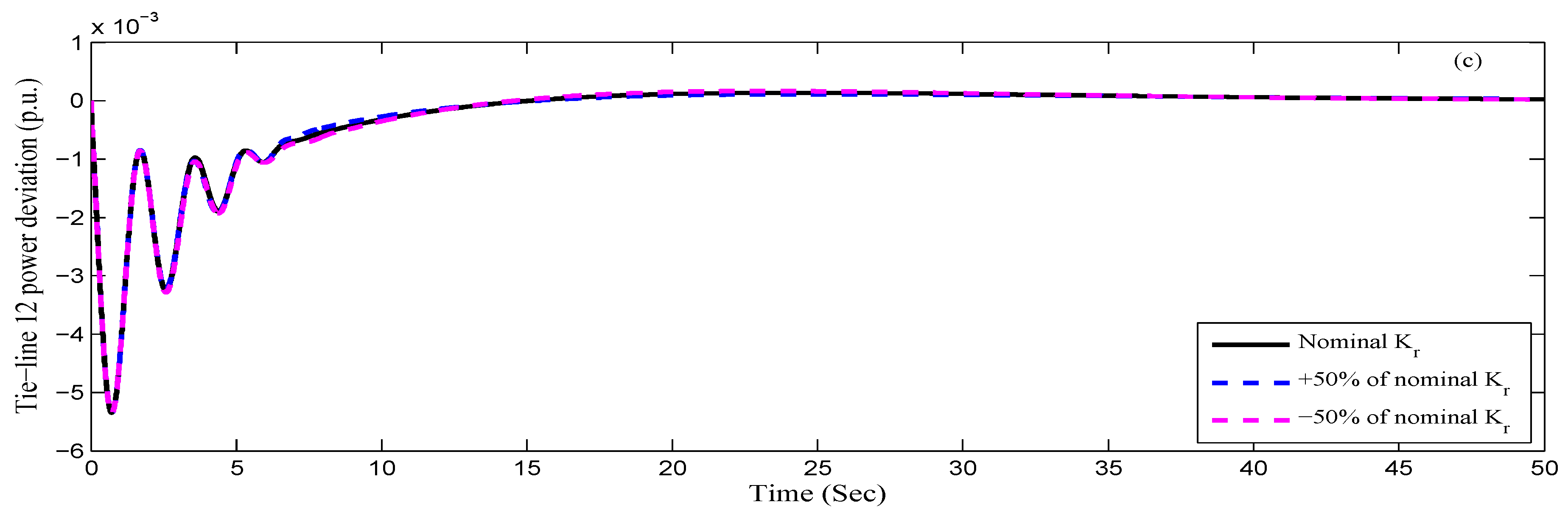
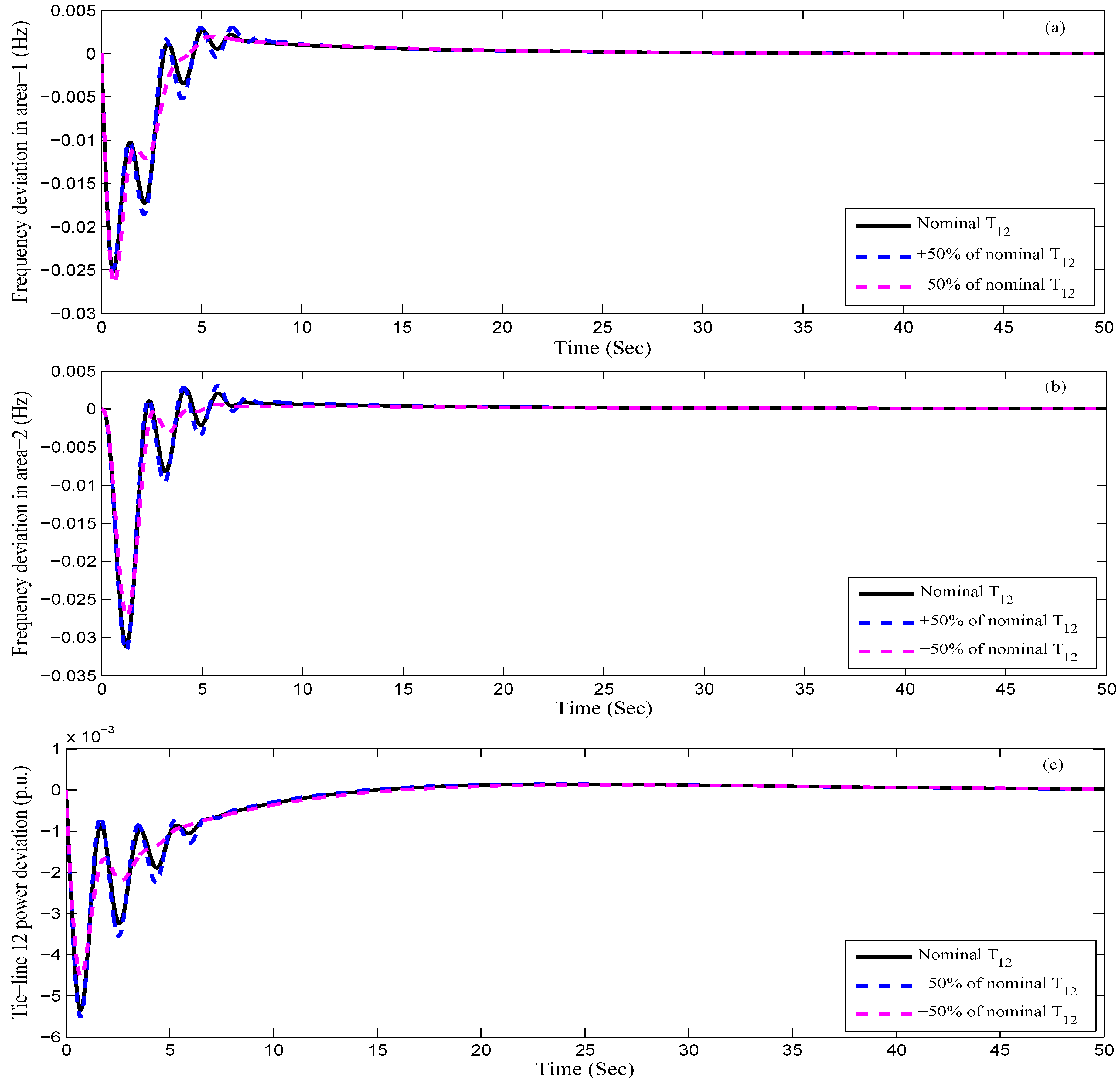
- Sensitivity analysis is carried out to show the robustness of the FOFP-iPID controller under a wide range of parameter variations and LPs.
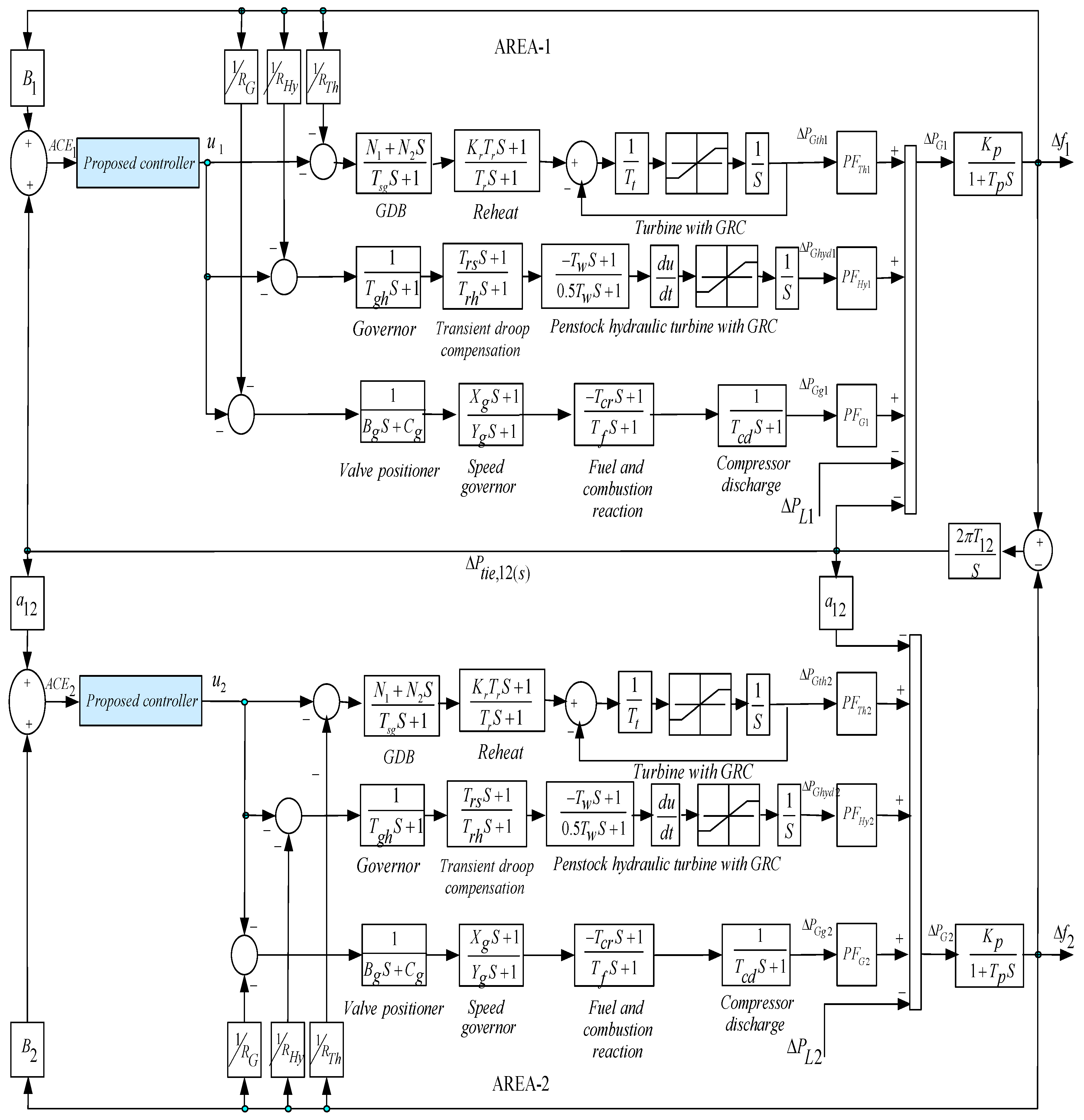
2. Mathematical Modelling of Investigated Power System
3. Controller Structure
3.1. Design of the Fopid Controller
3.2. Design of the Foipid Controller
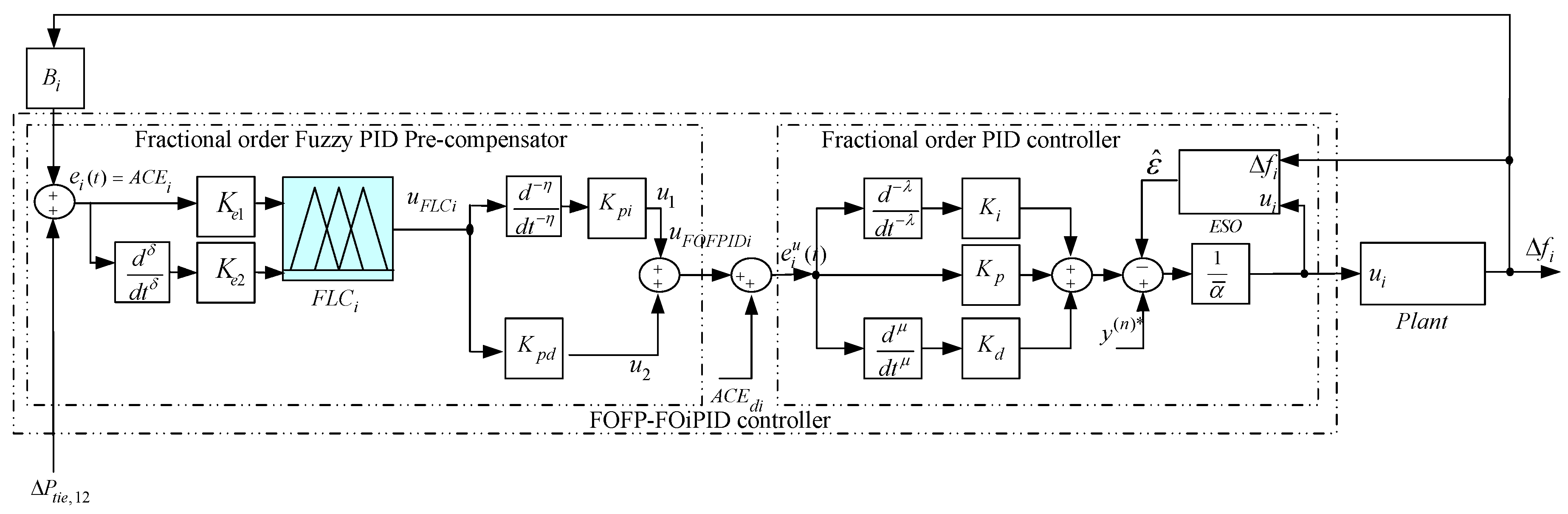
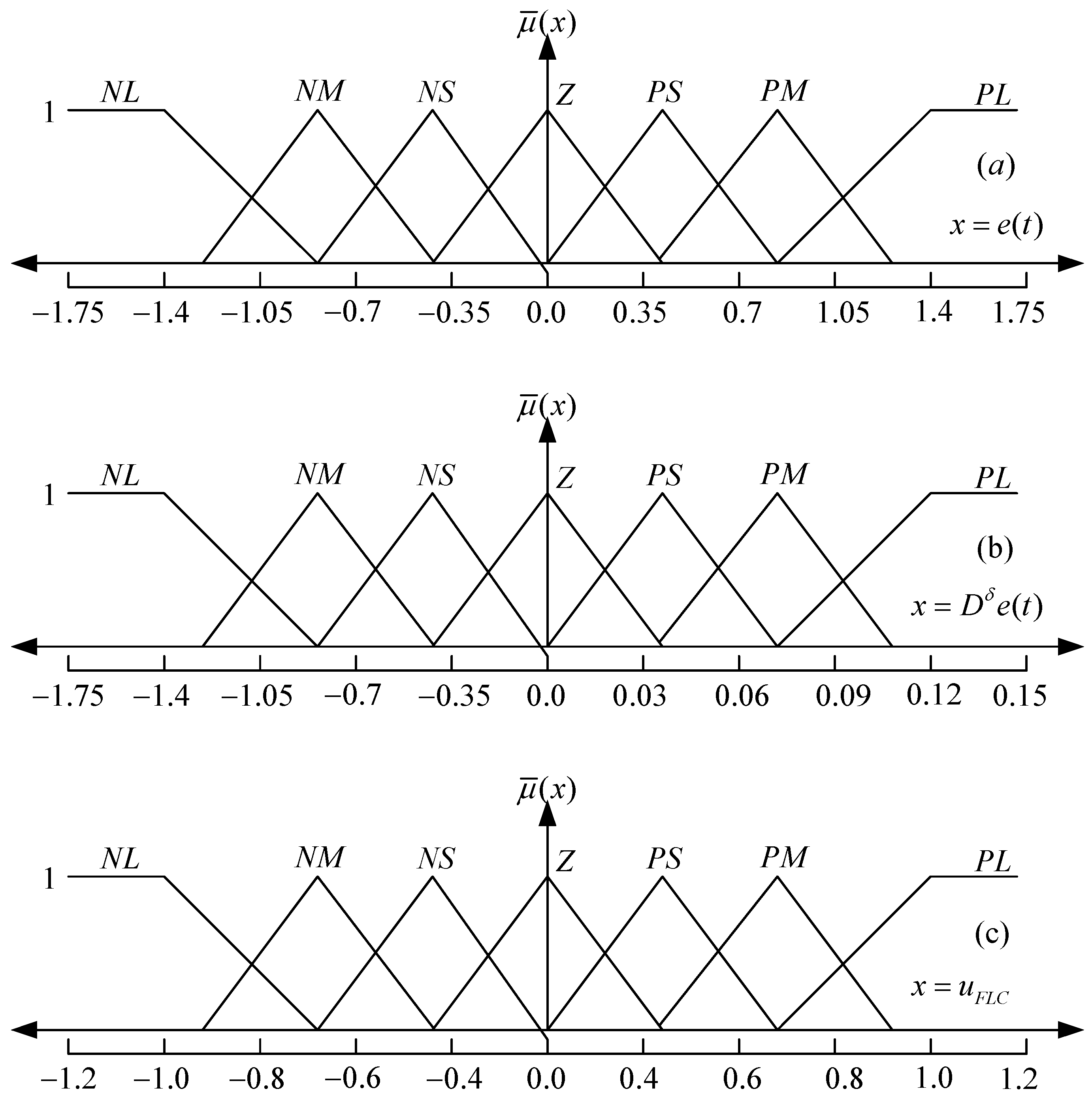
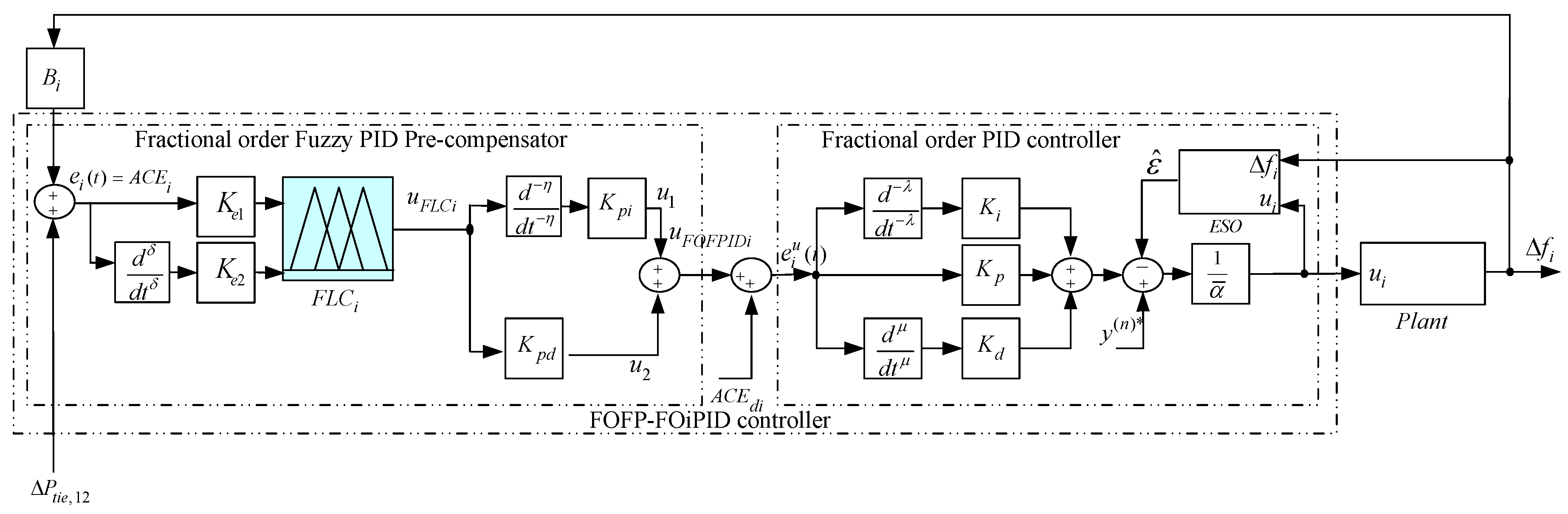
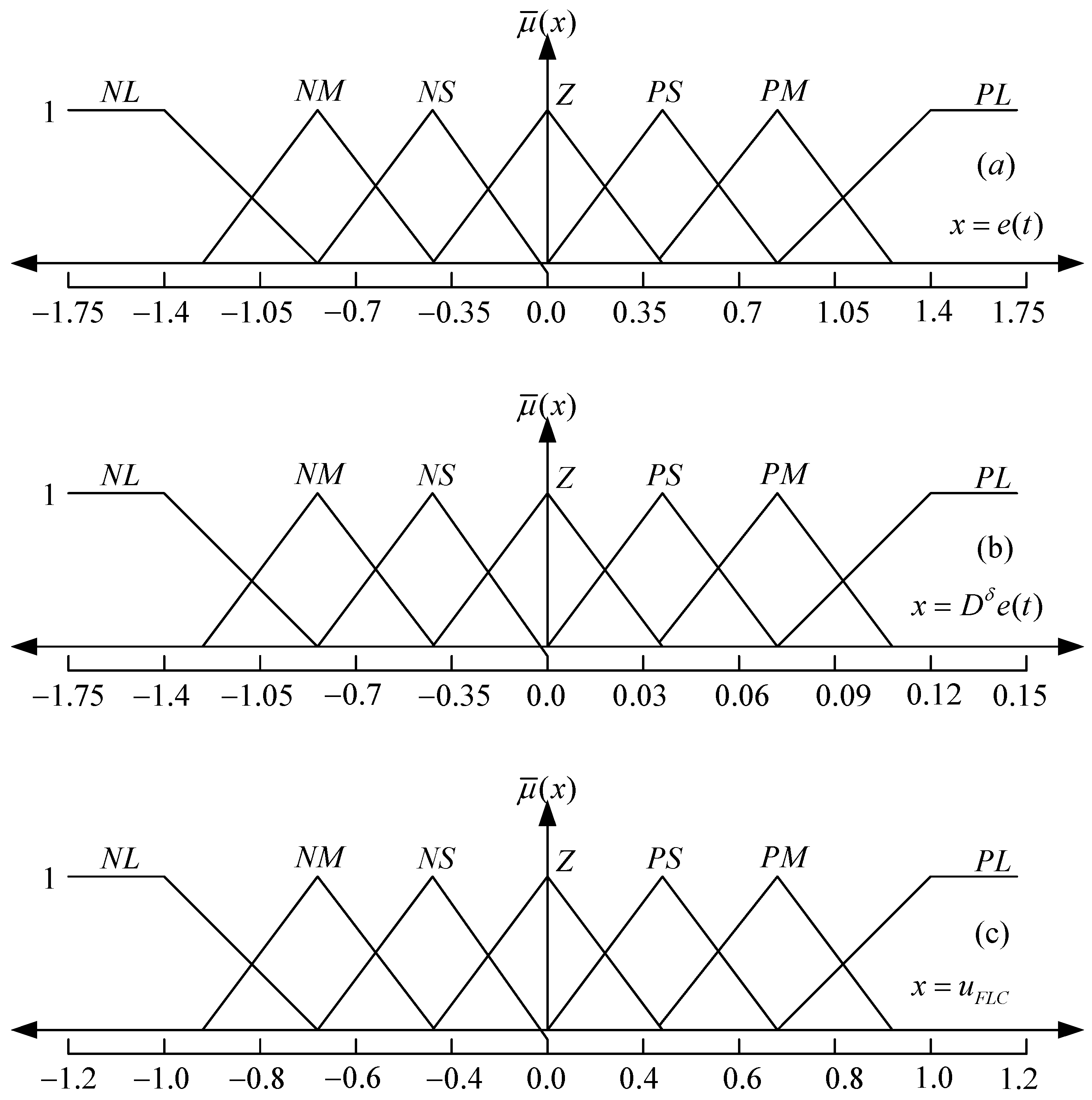
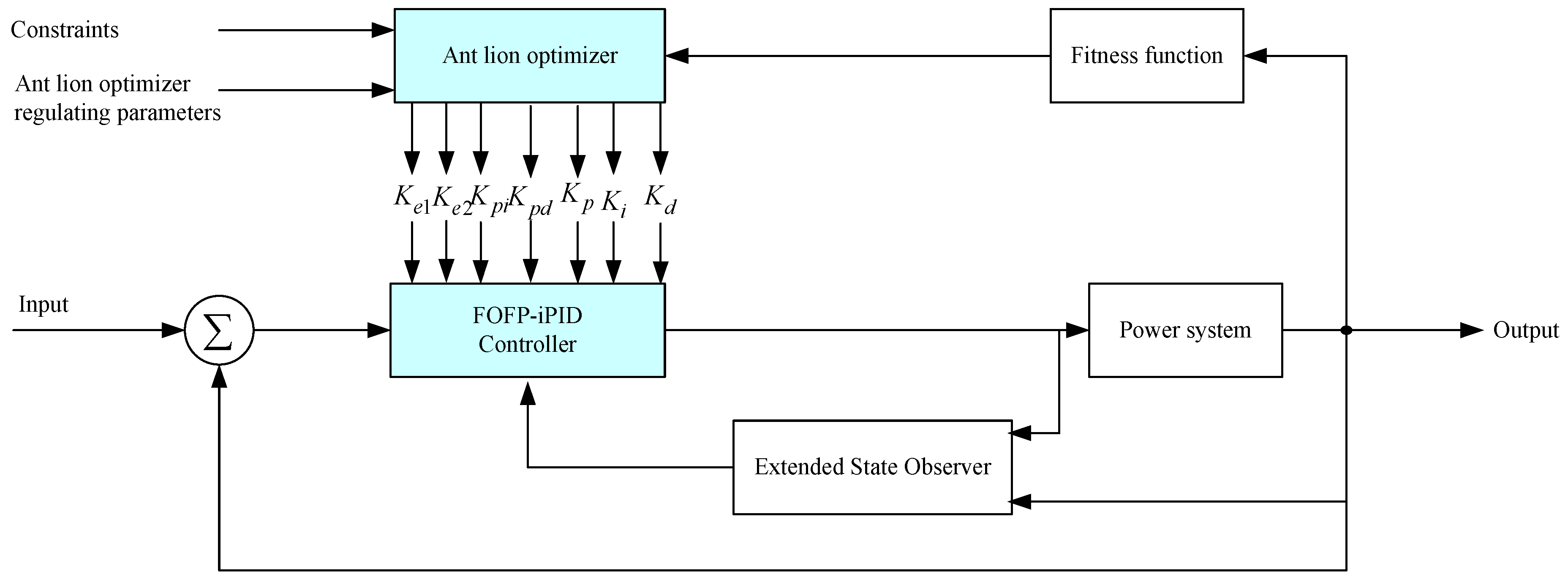
3.3. Design of the Fractional Order Fuzzy Pre-Compensated Intelligent PID (FOFP-iPID) Controller
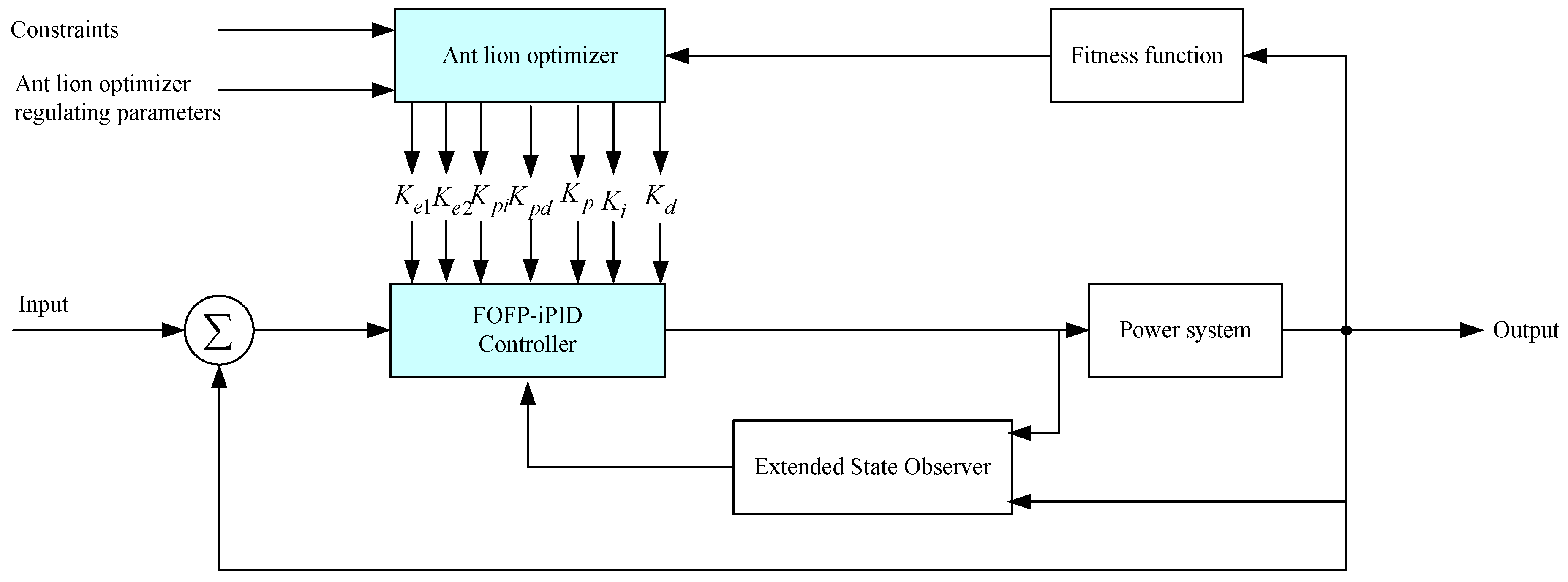
4. Objective Function and Its Solution
4.1. Objective Function for Controller Design
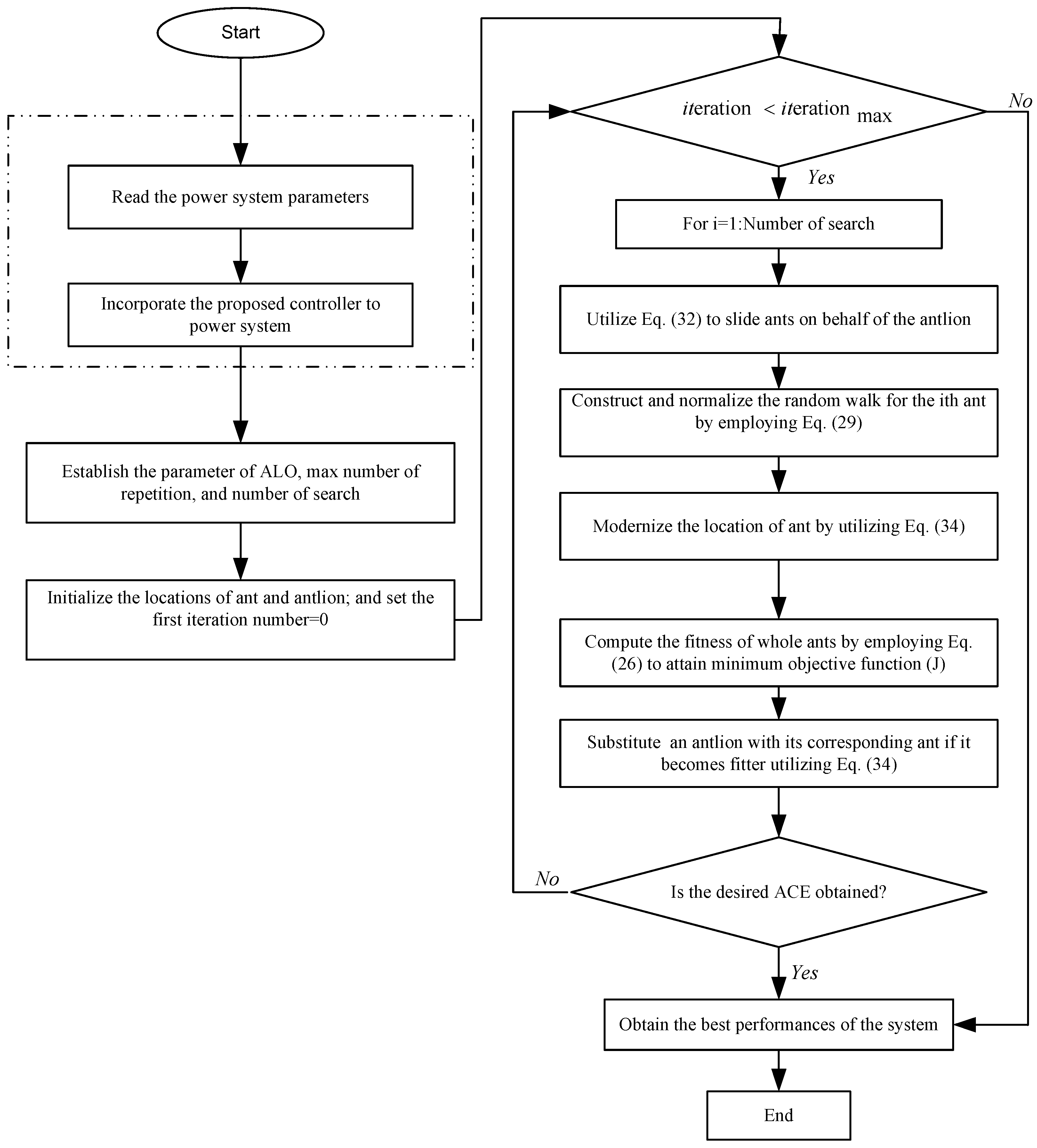
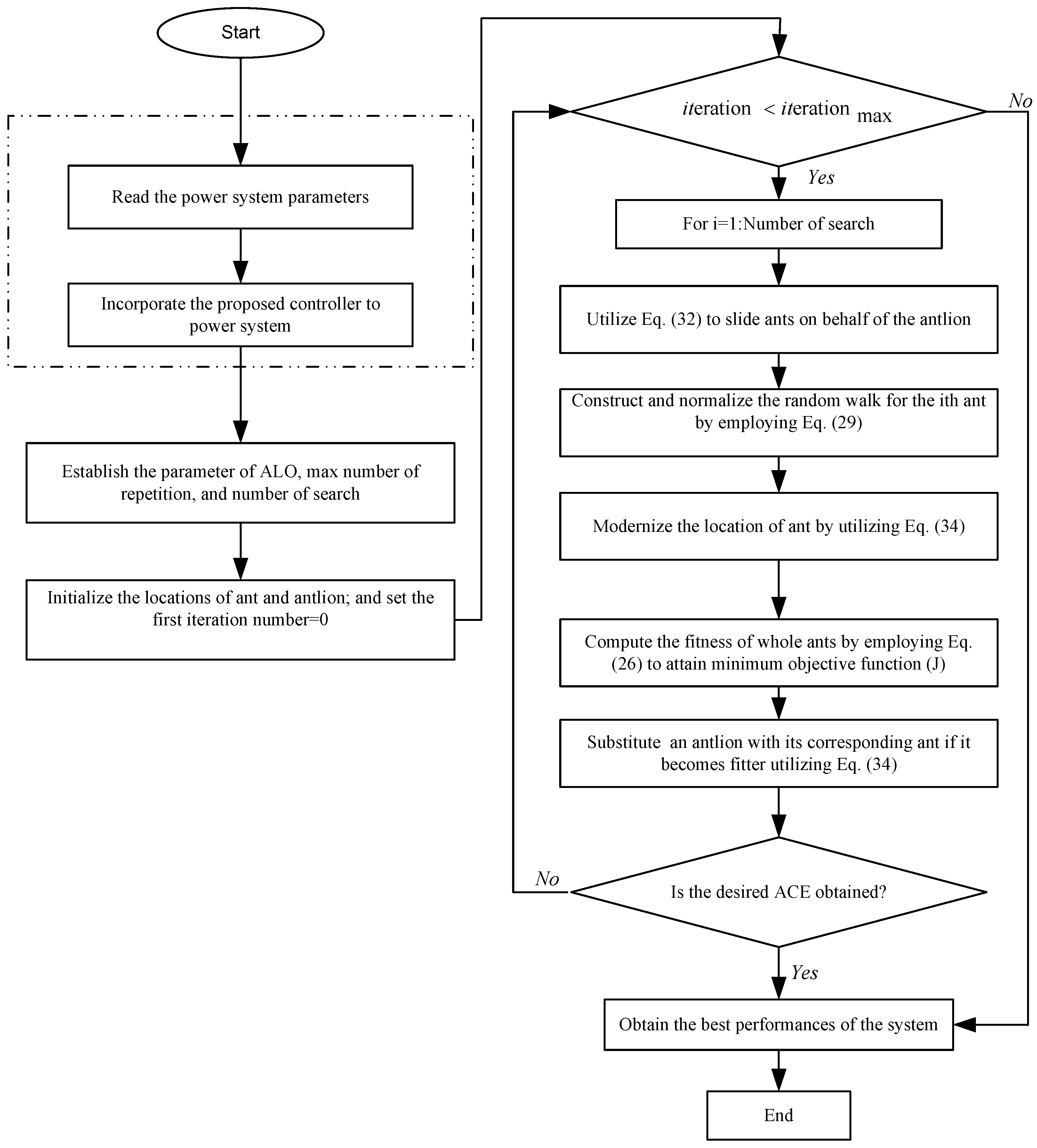
4.2. ALO Algorithm
4.2.1. Random Walk of Ants
4.2.2. Trapping in Antlions Traps
4.2.3. Building Traps
4.2.4. Sliding Ants against toward Antlion
4.2.5. Catching Preys and Rebuilding the Traps
4.2.6. Flowchart of the ALO Algorithm
5. Simulation Results and Discussion
- (1)
- Performance evaluation under different perturbations (LPs):
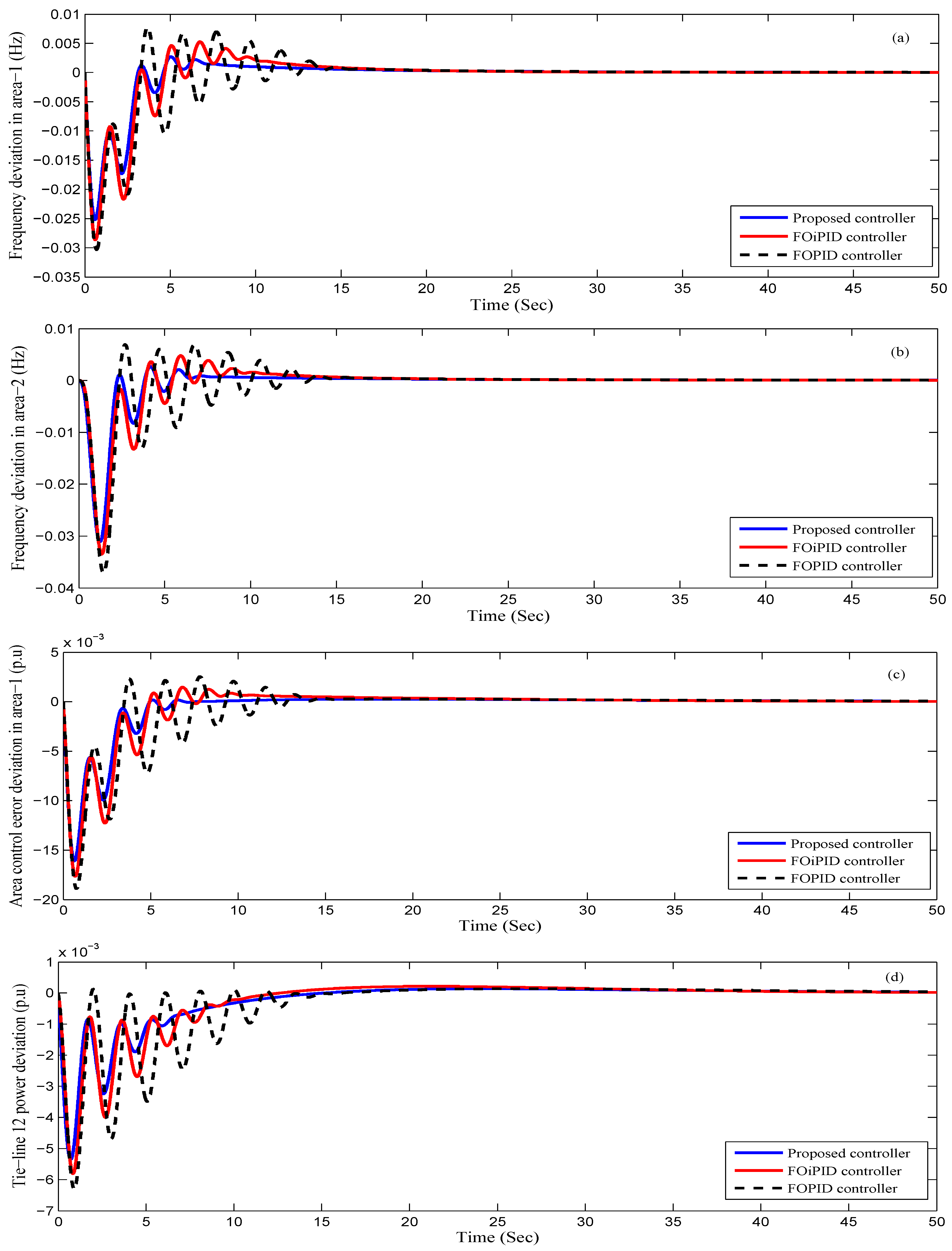
- Performance evaluation of the suggested FOFP-iPID controller under step load perturbation (SLP) in area-1.
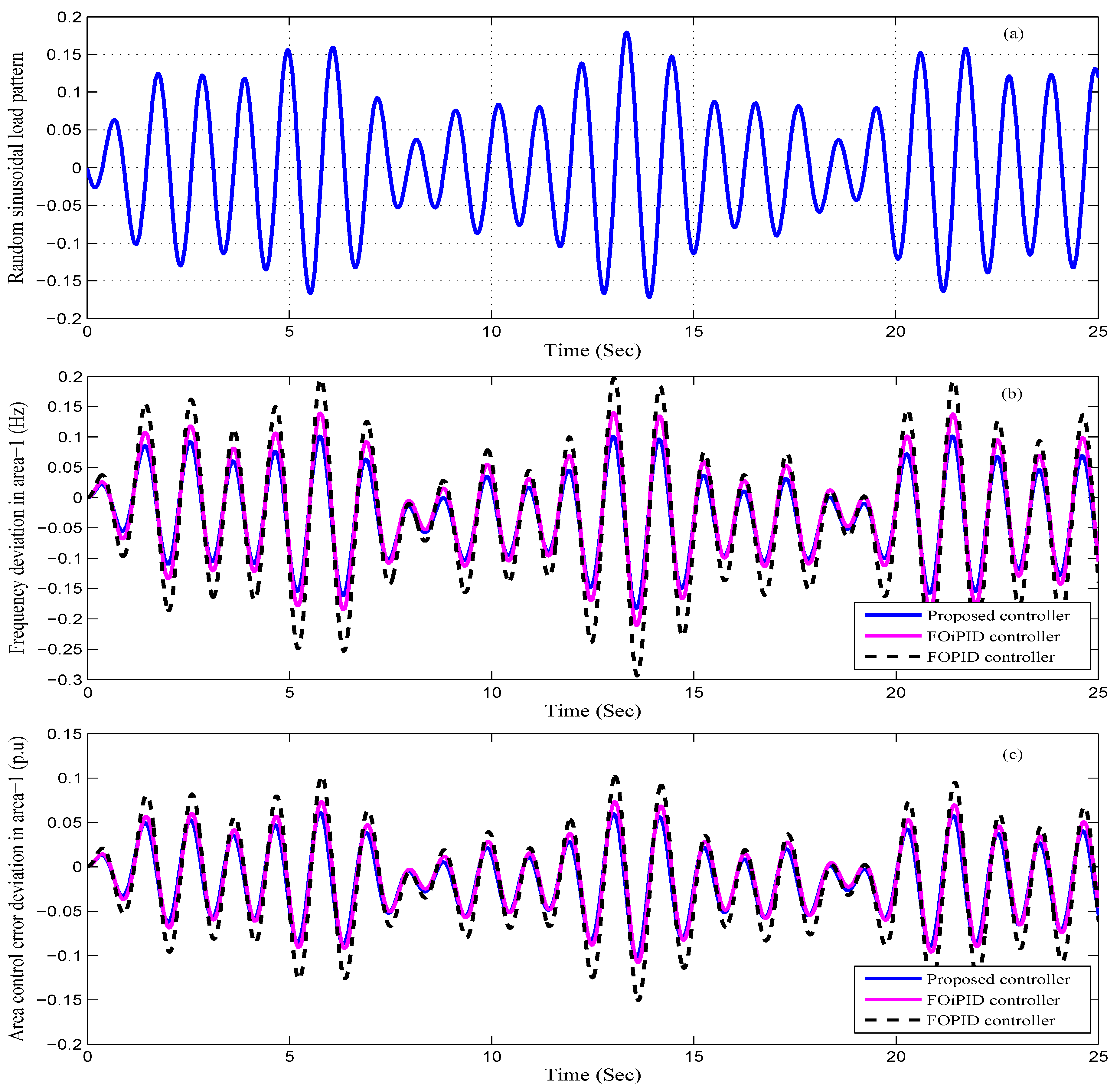
- Performance evaluation of the suggested FOFP-iPID controller under sinusoidal load change (SLC) in area-1.
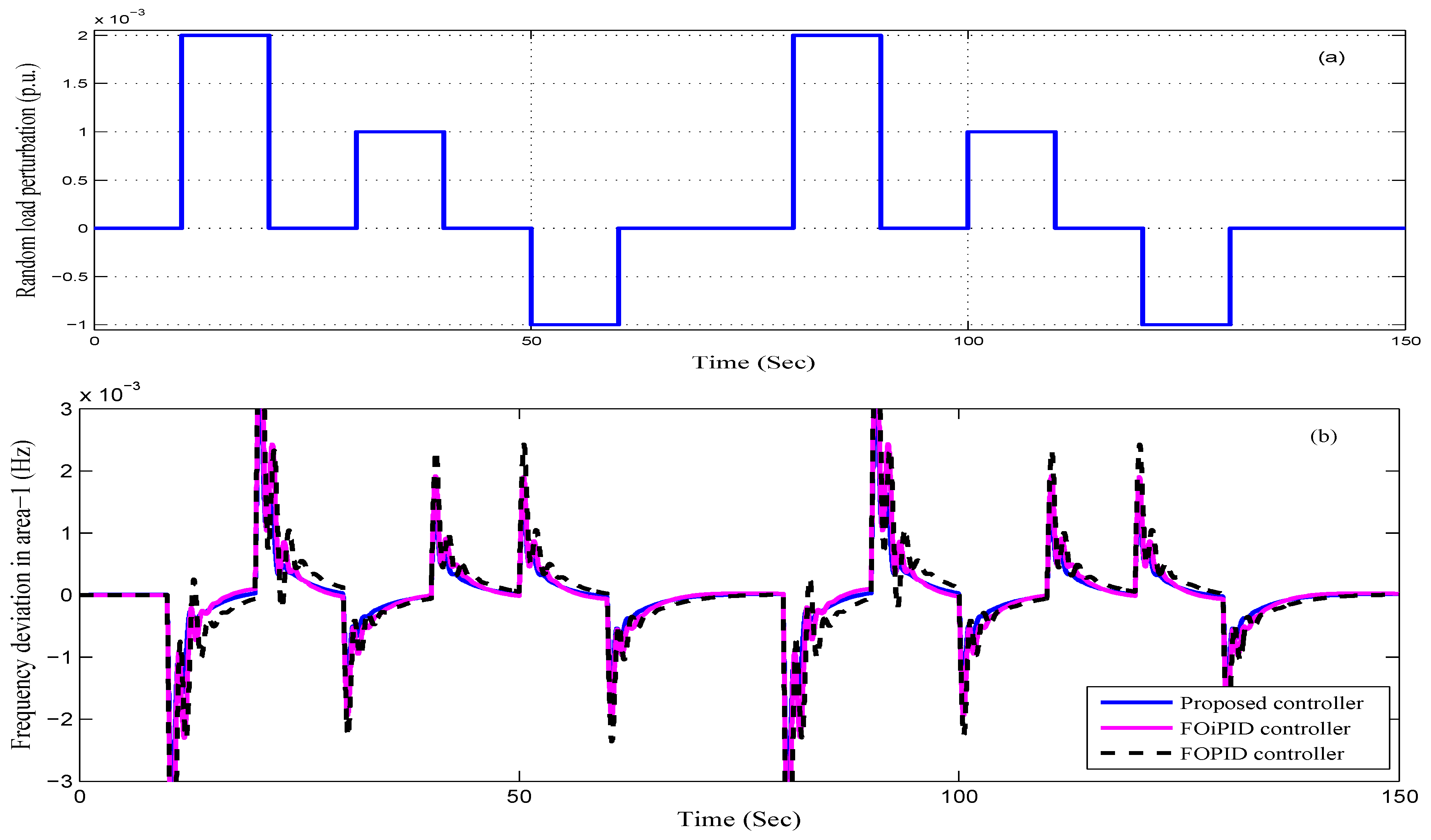
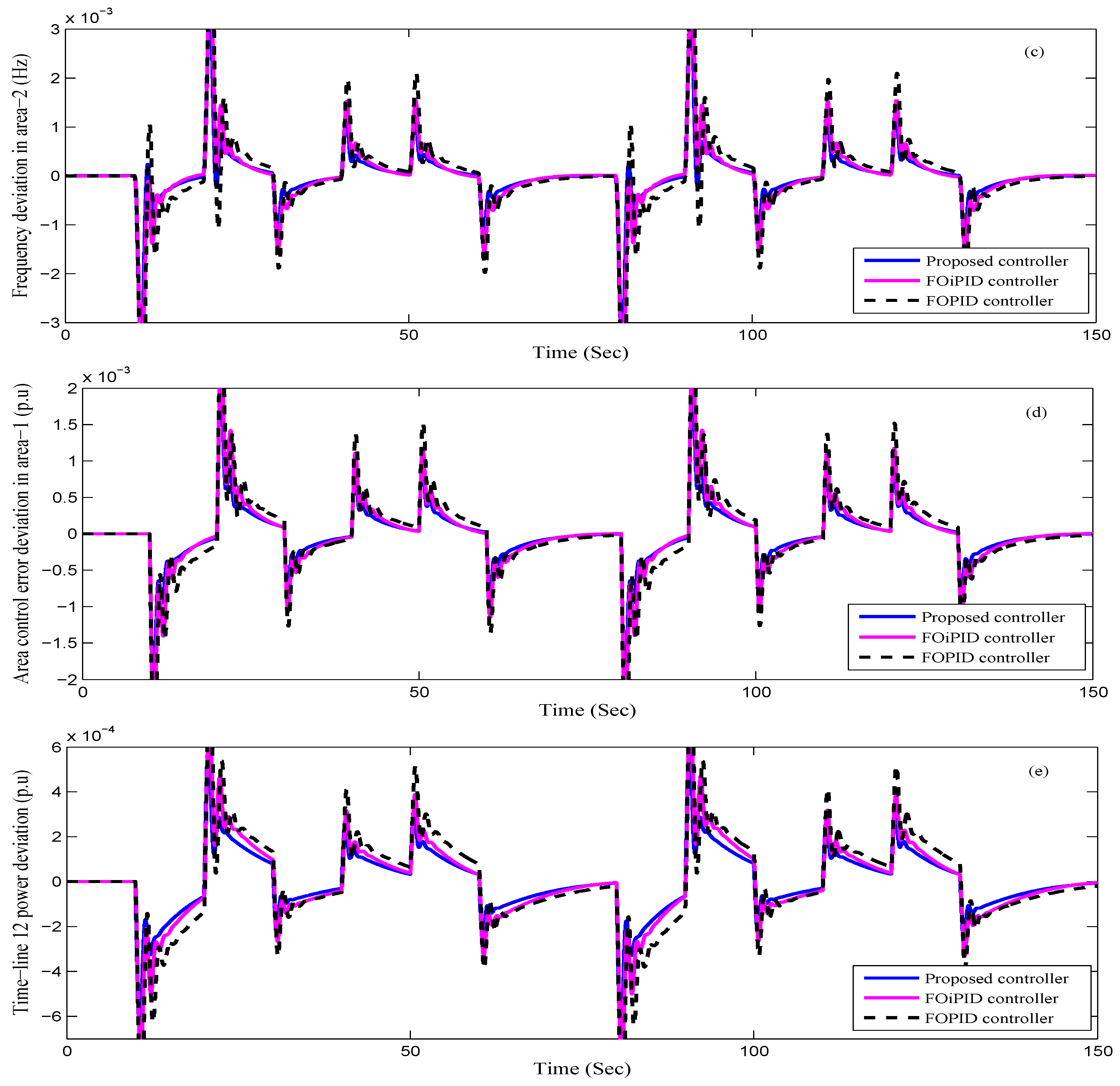
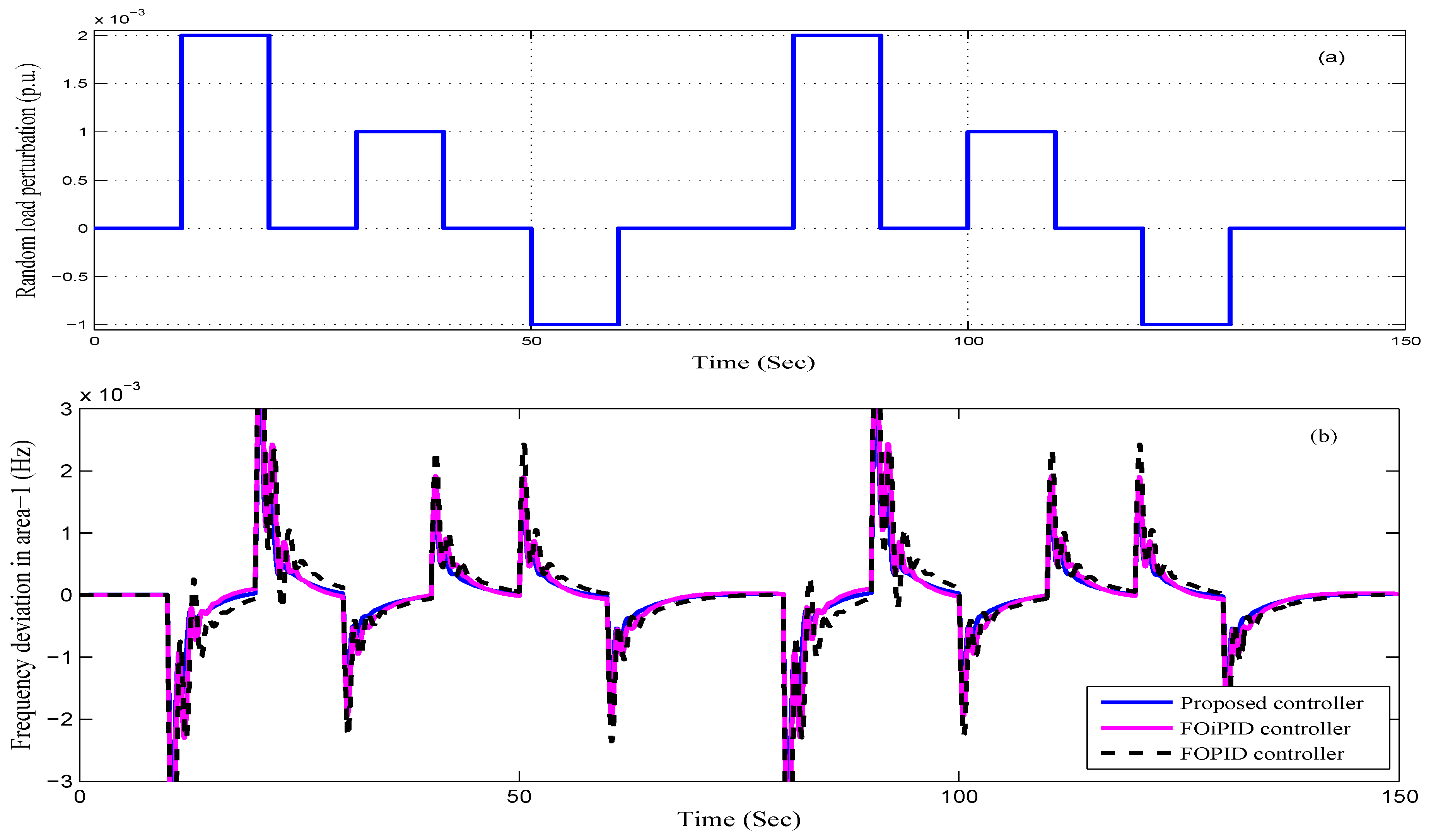
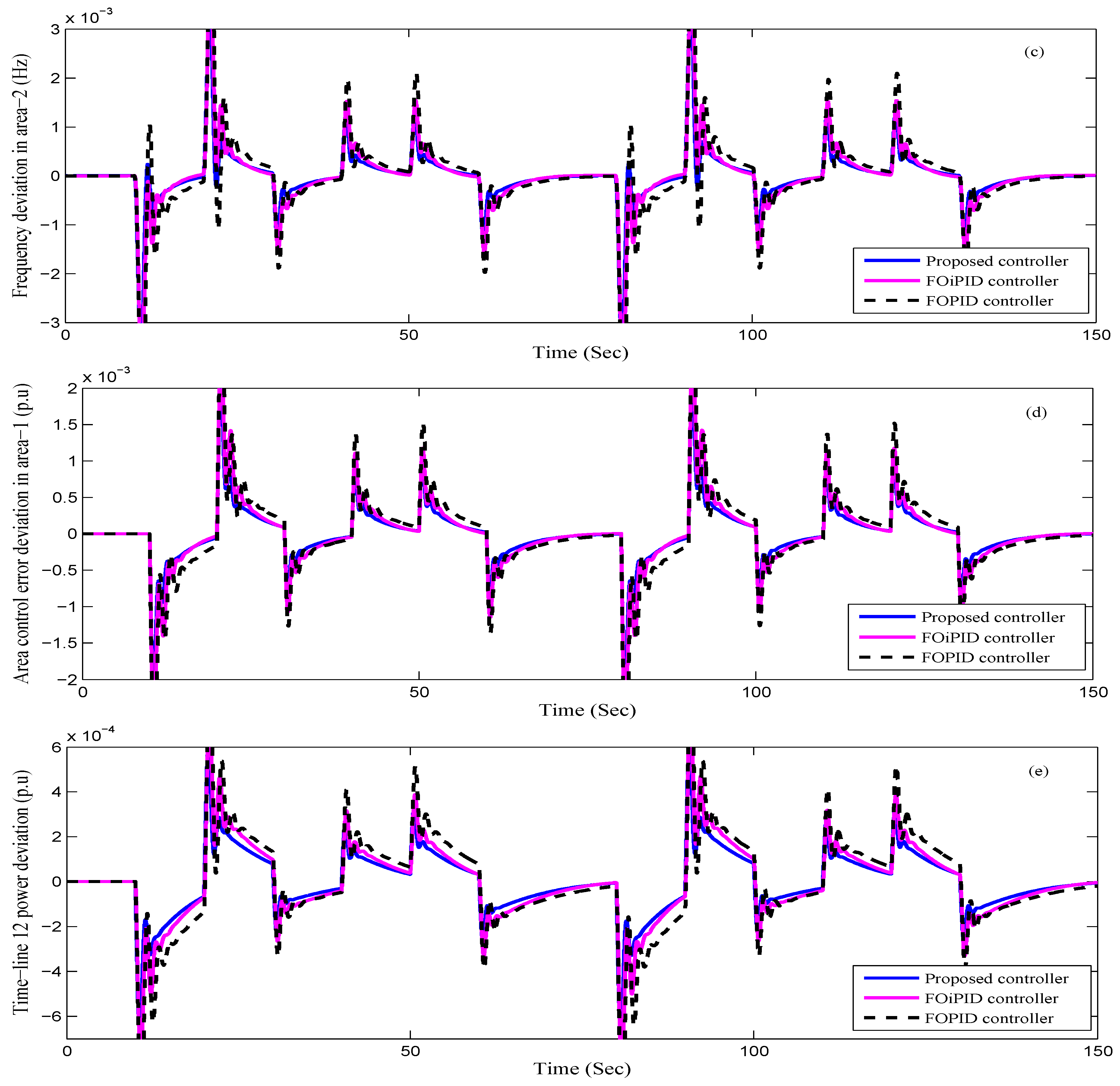
- Performance evaluation of the suggested FOFP-iPID controller under random load perturbation (RLP) in area-1.
- (2)
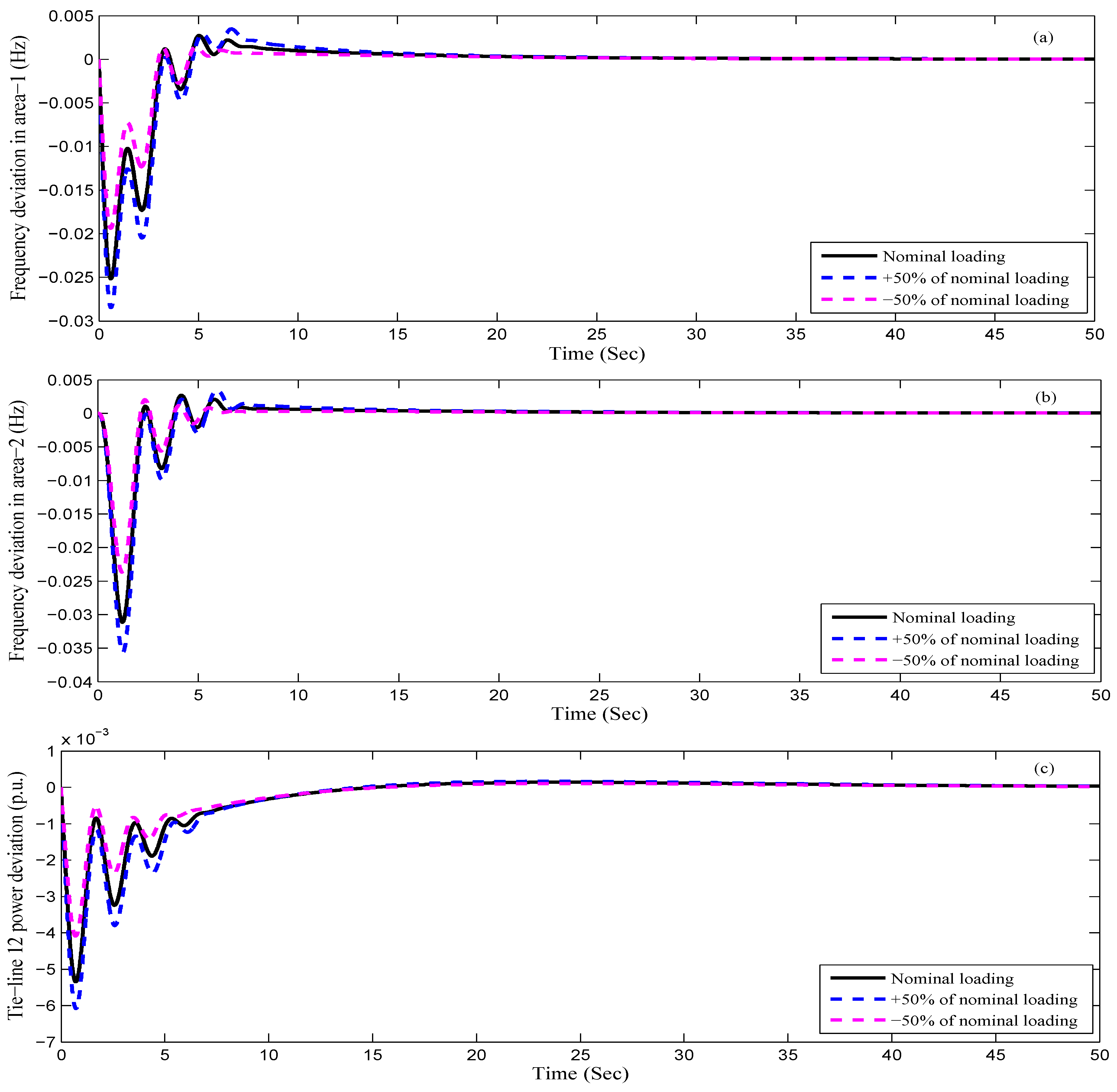
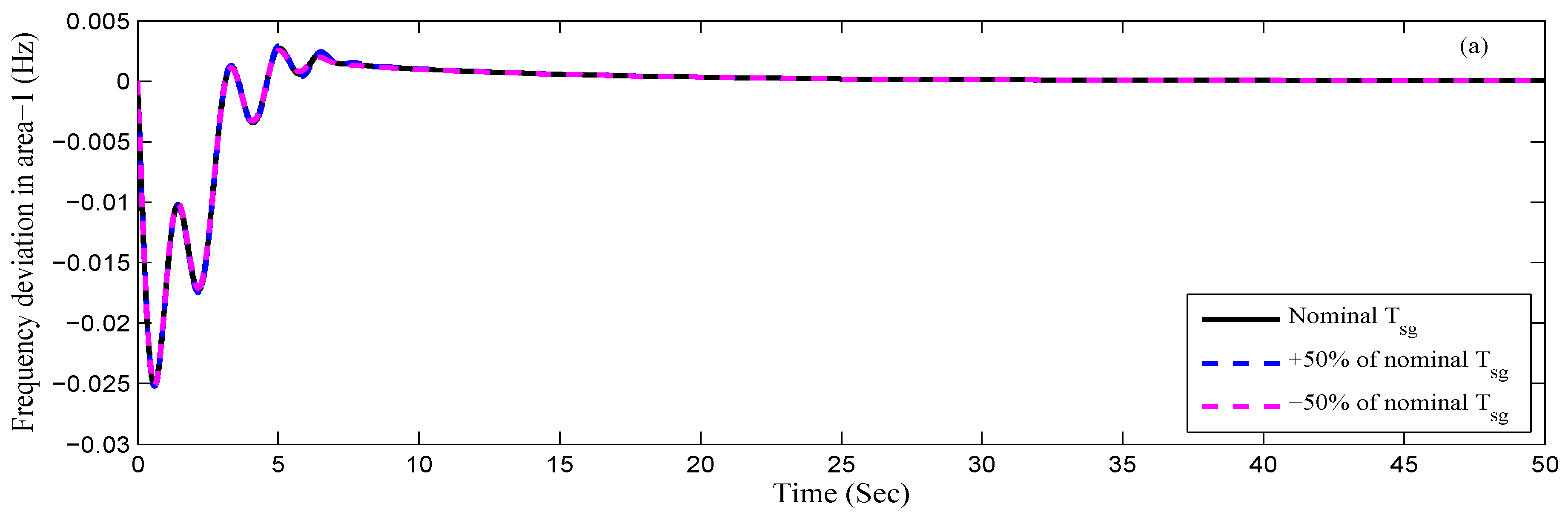
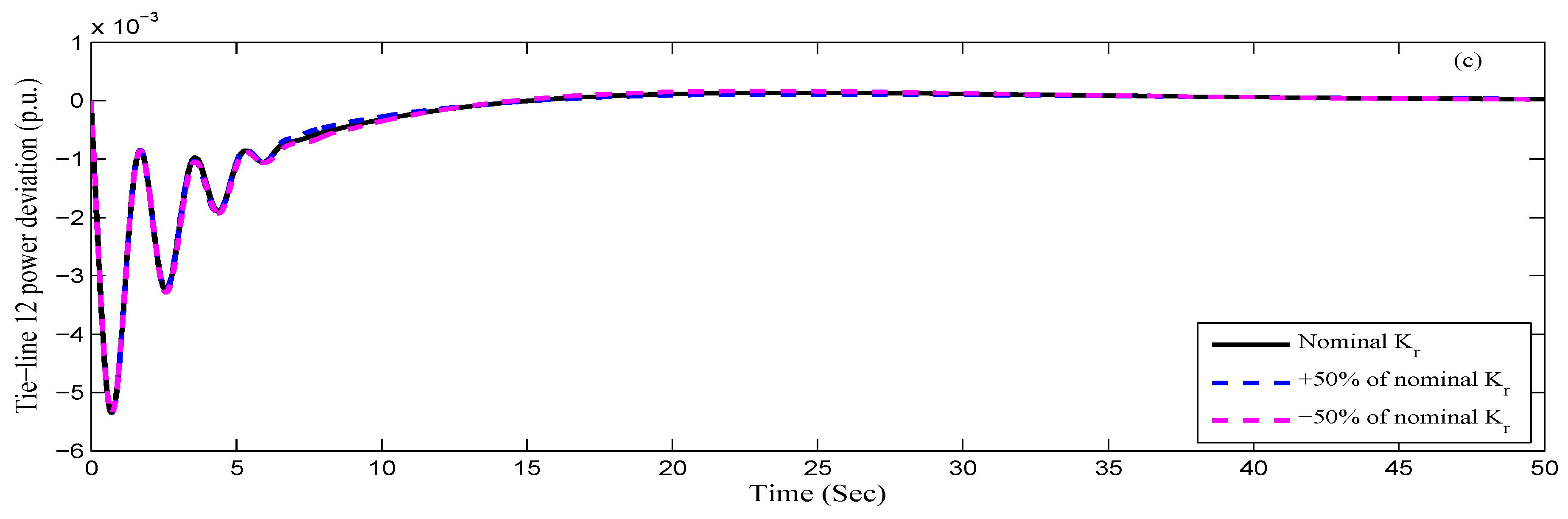
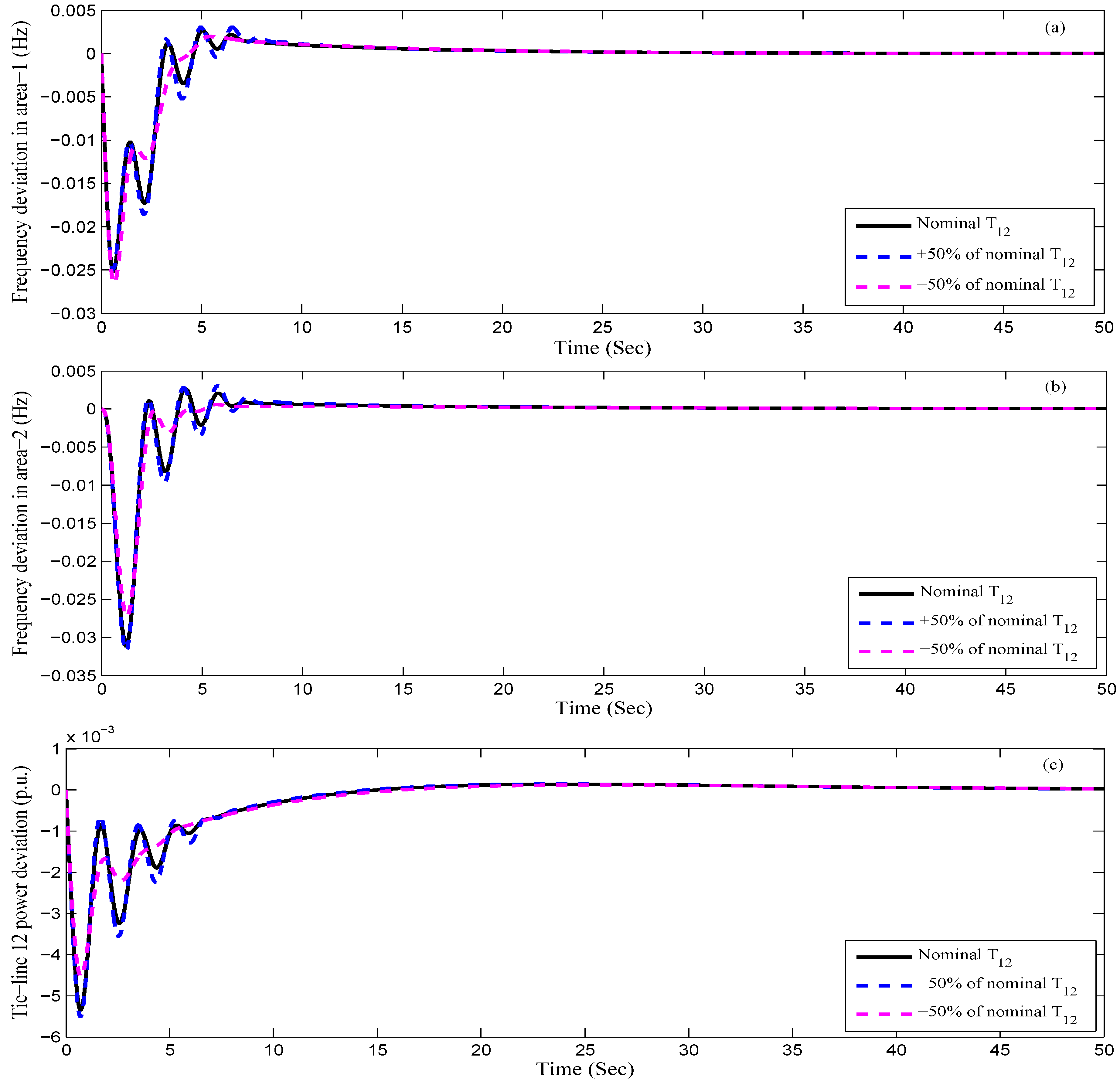
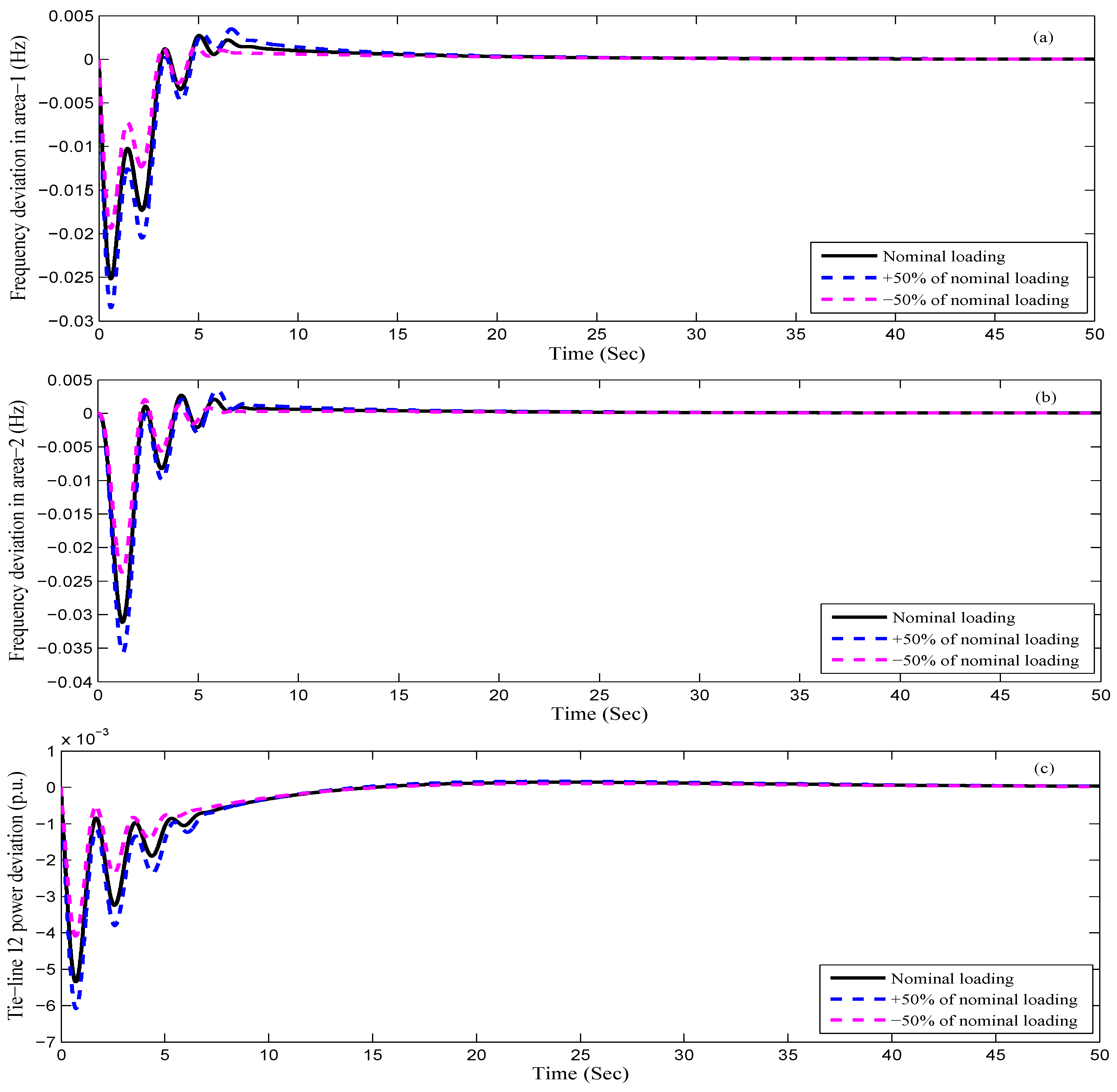
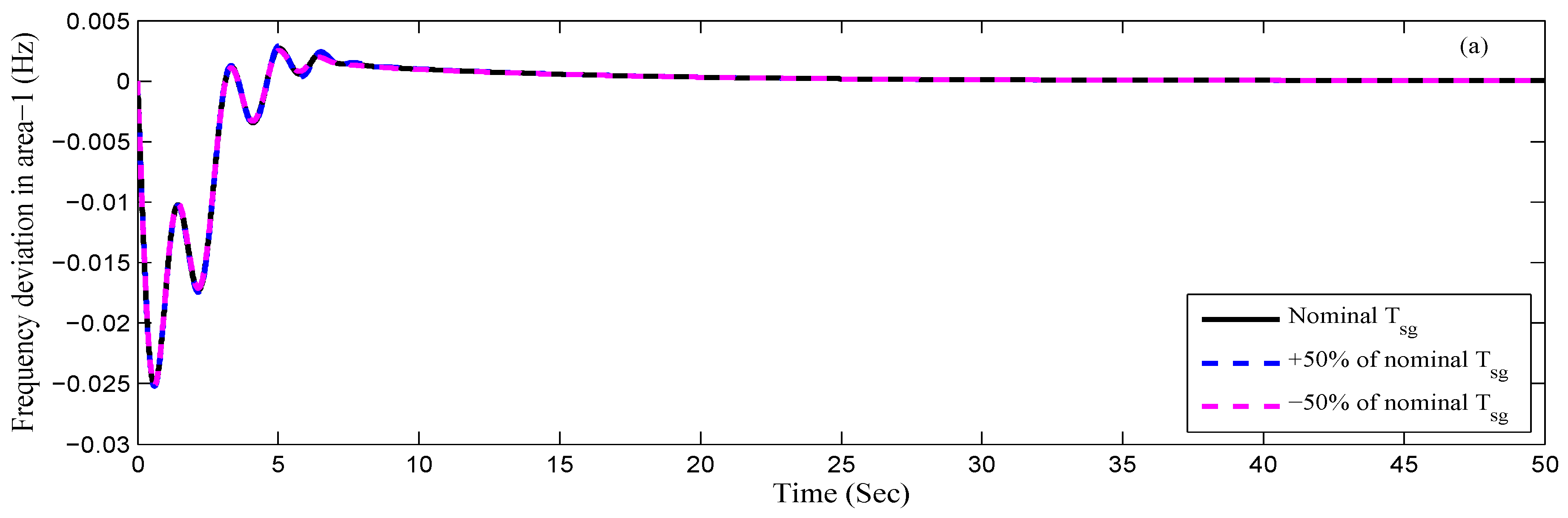
- Sensitivity analysis is also carried out to appraise the robustness of the current controller against uncertainty in system parameters.
5.1. Performance Evaluation under SLP
5.2. Performance Evaluation of the Controller for Sinusoidal Load Changes
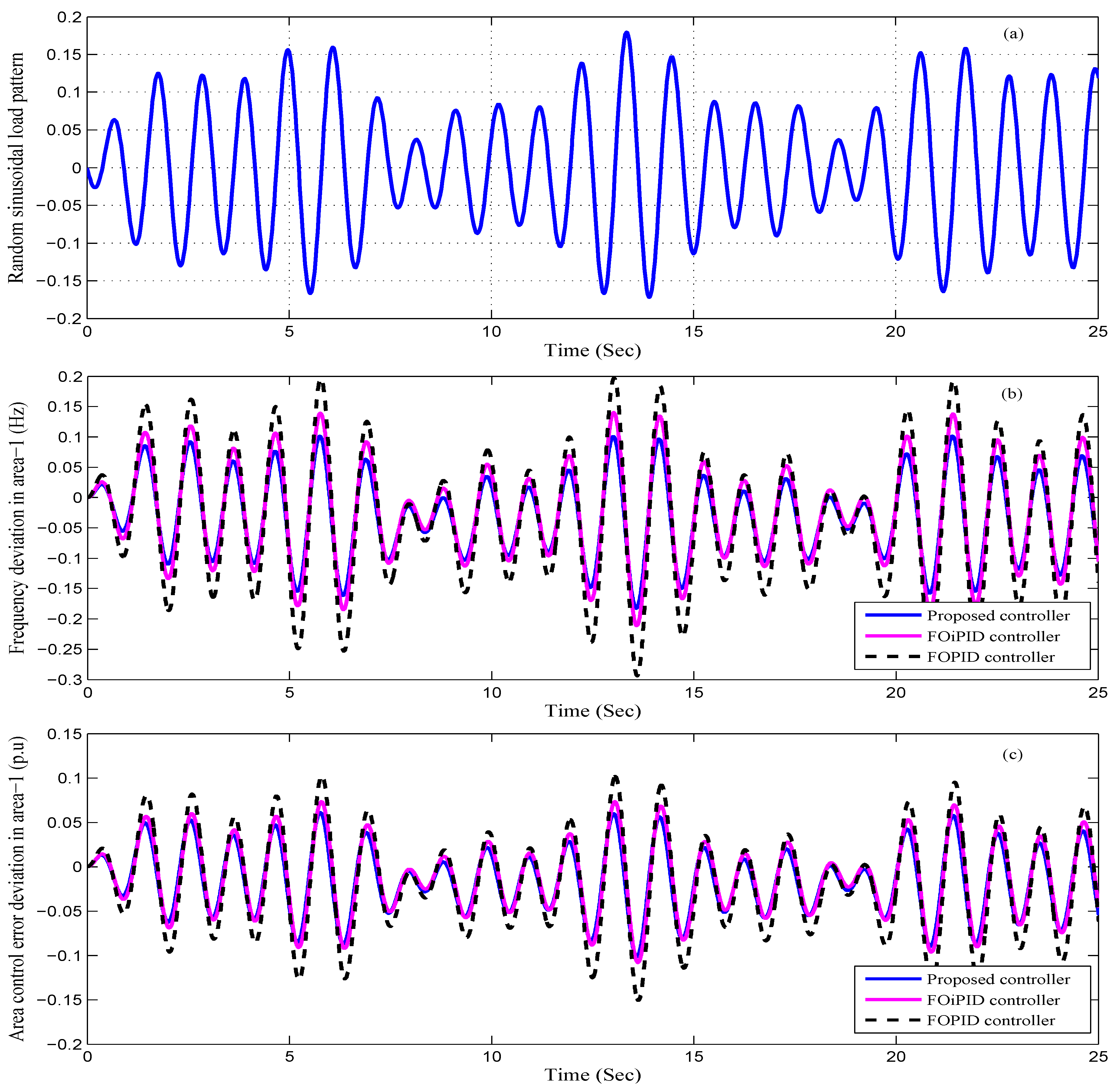
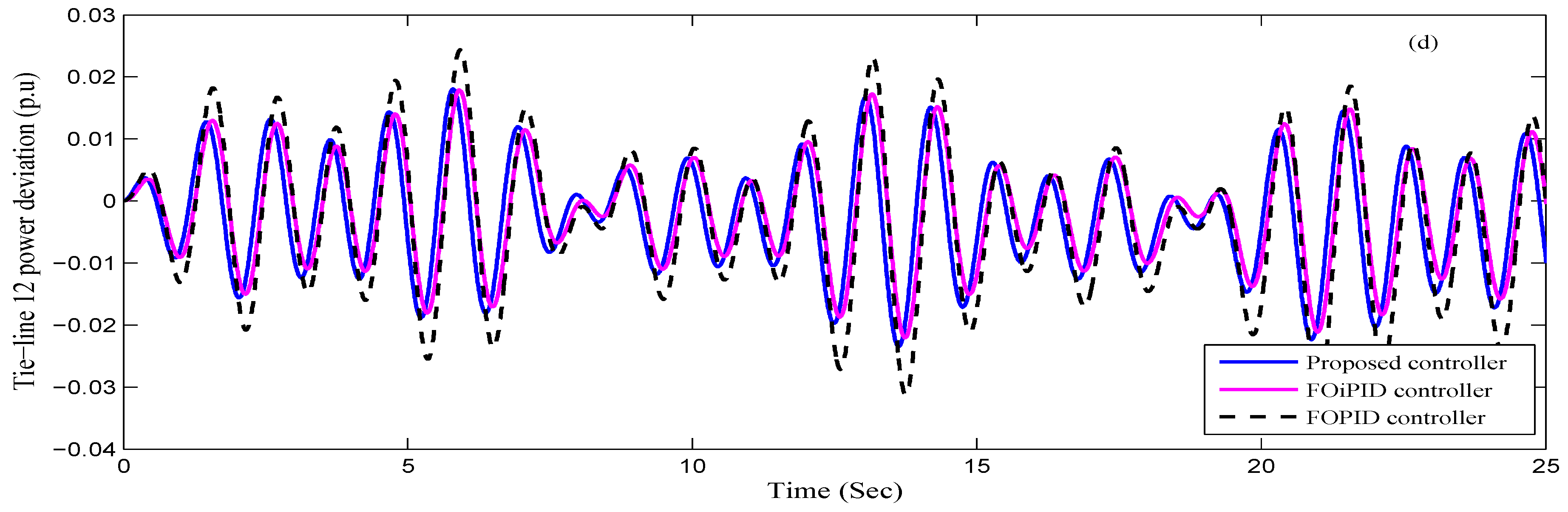
5.3. Performance Evaluation of the Controller under Random Load Perturbations
5.4. Sensitivity Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. System Parameters
References
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Shankar, R.; Pradhan, S.R.; Chatterjee, K.; Mandal, R. A comprehensive state of the art literature survey on LFC mechanism for power system. Renew. Sustain. Energy Rev. 2017, 76, 1185–1207. [Google Scholar] [CrossRef]
- Cohn, N. Control of Generation and Power Flow on Interconnected Systems, 2nd ed.; Wiley: Hoboken, NJ, USA, 1971. [Google Scholar]
- Gomaa Haroun, A.H.; Li, Y.-Y. A novel optimized hybrid fuzzy logic intelligent PID controller for an interconnected multi-area power system with physical constraints and boiler dynamics. ISA Trans. 2017, 71, 364–379. [Google Scholar] [CrossRef] [PubMed]
- Shahalami, S.H.; Farsi, D. Analysis of Load Frequency Control in a restructured multi-area power system with the Kalman filter and the LQR controller. AEU Int. J. Electron. Commun. 2018, 86, 25–46. [Google Scholar] [CrossRef]
- Ahmadi, A.; Aldeen, M. An LMI approach to the design of robust delay-dependent overlapping load frequency control of uncertain power systems. Int. J. Electr. Power Energy Syst. 2016, 81, 48–63. [Google Scholar] [CrossRef]
- Liao, K.; Xu, Y. A Robust Load Frequency Control Scheme for Power Systems Based on Second-Order Sliding Mode and Extended Disturbance Observer. IEEE Trans. Ind. Inform. 2018, 14, 3076–3086. [Google Scholar] [CrossRef]
- Popli, N.; Ilic, M.D. Storage devices for automated frequency regulation and stabilization. In Proceedings of the 2014 IEEE PES General Meeting/Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- Chakraborty, T.; Watson, D.; Rodgers, M. Automatic Generation Control Using an Energy Storage System in a Wind Park. IEEE Trans. Power Syst. 2018, 33, 198–205. [Google Scholar] [CrossRef]
- Pradhan, P.C.; Sahu, R.K.; Panda, S. Firefly algorithm optimized fuzzy PID controller for AGC of multi-area multi-source power systems with UPFC and SMES. Eng. Sci. Technol. Int. J. 2016, 19, 338–354. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, K.-C.; Chong, E.K. Fuzzy precompensated PID controllers. IEEE Trans. Control. Syst. Technol. 1994, 2, 406–411. [Google Scholar]
- Morsali, J.; Zare, K.; Hagh, M.T. Applying fractional order PID to design TCSC-based damping controller in coordination with automatic generation control of interconnected multi-source power system. Eng. Sci. Technol. Int. J. 2017, 20, 1–17. [Google Scholar] [CrossRef]
- Alomoush, M.I. Load frequency control and automatic generation control using fractional-order controllers. Electr. Eng. 2010, 91, 357–368. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Fractional-order load-frequency control of interconnected power systems using chaotic multi-objective optimization. Appl. Soft Comput. 2015, 29, 328–344. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. BFOA-scaled fractional order fuzzy PID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm Evol. Comput. 2017, 32, 202–218. [Google Scholar] [CrossRef]
- Morsali, J.; Zare, K.; Hagh, M.T. Comparative Performance Evaluation of Fractional Order Controllers in LFC of Two-area Diverse-unit Power System with Considering GDB and GRC Effects. J. Electr. Syst. Inf. Technol. 2018, 5, 708–722. [Google Scholar] [CrossRef]
- Zare, K.; Hagh, M.T.; Morsali, J. Effective oscillation damping of an interconnected multi-source power system with automatic generation control and TCSC. Int. J. Electr. Power Energy Syst. 2015, 65, 220–230. [Google Scholar] [CrossRef]
- Parmar, K.S.; Majhi, S.; Kothari, D. LFC of an interconnected power system with thyristor controlled phase shifter in the tie line. Int. J. Comput. Appl. 2012, 41, 27–30. [Google Scholar]
- Oustaloup, A.; Mathieu, B.; Lanusse, P. The CRONE control of resonant plants: Application to a flexible transmission. Eur. J. Control 1995, 1, 113–121. [Google Scholar] [CrossRef]
- Chathoth, I.; Ramdas, S.K.; Krishnan, S.T. Fractional-order proportional-integral-derivative-based automatic generation control in deregulated power systems. Electr. Power Compon. Syst. 2015, 43, 1931–1945. [Google Scholar] [CrossRef]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON: Fractional-order modeling and control toolbox for MATLAB. In Proceedings of the 18th International Conference Mixed Design of Integrated Circuits and Systems (MIXDES), Gliwice, Poland, 16–18 June 2011. [Google Scholar]
- Yang, X.; Huang, Y. Capabilities of extended state observer for estimating uncertainties. In Proceedings of the 2009 Conference on American Control Conference, St. Louis, MO, USA, 10–12 June 2009. [Google Scholar]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Gomaa Haroun, A.; Yin-Ya, L. A novel optimized fractional-order hybrid fuzzy intelligent PID controller for interconnected realistic power systems. Trans. Inst. Meas. Control 2019. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Governor time constant of steam turbine | Time constant of the valve positioner | ||
| Steam turbine time constant | Hydro turbine governor time constant | ||
| Steam turbine reheat time constant | Compressor discharge volume time constant | ||
| Steam turbine reheat constant | Gas turbine valve positioner | ||
| Lead time constant of gas turbine governor | Gas turbine fuel time constant | ||
| Lag time constant of gas turbine governor | Gas turbine combustion reaction time delay | ||
| Starting time of water in hydro turbine | Hydro turbine speed governor reset time | ||
| Power system time constants | Participation factors of thermal unit | ||
| Participation factors of hydro unit | Participation factors of gas unit | ||
| Power system gains | Synchronizing coefficient | ||
| Governor speed regulation parameters of thermal unit | Governor speed regulation parameters of hydro unit | ||
| Governor speed regulation parameters of gas unit | Frequency bias coefficients of area-1 | ||
| Frequency bias coefficients of area-2 |
| ACE | |||||||
|---|---|---|---|---|---|---|---|
| NL | NM | NS | Z | PS | PM | PL | |
| NL | PL | PL | PL | PM | PM | PS | Z |
| NM | PL | PM | PM | PM | PS | Z | NS |
| NS | PL | PM | PS | PS | Z | NS | NM |
| Z | PM | PM | PS | Z | NS | NM | NM |
| PS | PM | PS | Z | NS | NS | NM | LN |
| PM | PS | Z | NS | NM | NM | NM | LN |
| PL | Z | NS | NM | NM | LN | LN | LN |
| Controller | Controller Gains | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| FOPID [17] | 0.8413 | 1.3263 | 1.4395 | - | - | - | - | 0.8512 | 0.8768 | - | - |
| FOiPID | 0.9413 | 0.9663 | 1.0432 | - | - | - | - | 0.9765 | 0.7986 | - | - |
| Proposed controller | 0.7458 | 1.0115 | 1.9765 | 0.5670 | 0.6961 | 0.9552 | 0.6785 | 0.5611 | 0.7654 | 0.9045 | 0.8563 |
| Controller | Settling Time (Sec) for 5% Band | Peak Overshoot | Peak Undershoot () | ITAE | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FOPID [17] | 11.57 | 10.72 | 11.450 | 9.951 | 0.0076 | 0.0069 | 0.0001 | 0.0023 | 0.0302 | 0.0371 | 0.0063 | 0.0187 | 1.1780 |
| FOiPID | 8.058 | 7.684 | 8.764 | 6.009 | 0.0052 | 0.0047 | 0.0 | 0.0014 | 0.0282 | 0.0330 | 0.0058 | 0.0176 | 0.9714 |
| Proposed controller | 5.325 | 4.371 | 8.750 | 4.250 | 0.0034 | 0.0033 | 0.0 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.0157 | 0.7057 |
| Controller Parameter Variation | %Change | Settling Time (Sec) for 5% Band | Peak Overshoot | Peak Undershoot () | ITAE | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nominal | No change | 5.325 | 4.371 | 8.750 | 0.0034 | 0.0033 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.7057 |
| Loading condition | 5.892 | 5.670 | 8.801 | 0.0035 | 0.0035 | 0.0 | 0.0283 | 0.0353 | 0.0061 | 0.8718 | |
| 4.942 | 4.001 | 8.475 | 0.0014 | 0.0015 | 0.0 | 0.0192 | 0.0237 | 0.0041 | 0.5038 | ||
| 5.351 | 4.382 | 8.740 | 0.0034 | 0.0033 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.7238 | ||
| 5.315 | 4.365 | 8.760 | 0.0035 | 0.0034 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.6913 | ||
| 6.021 | 5.341 | 8.750 | 0.0035 | 0.0034 | 0.0 | 0.0248 | 0.0315 | 0.0054 | 0.7458 | ||
| 4.567 | 3.925 | 8.752 | 0.0025 | 0.0012 | 0.0 | 0.0264 | 0.0269 | 0.0045 | 0.6576 | ||
| 5.325 | 4.371 | 8.750 | 0.0035 | 0.0034 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.7110 | ||
| 3.325 | 4.371 | 8.750 | 0.0034 | 0.0033 | 0.0 | 0.0243 | 0.0307 | 0.0053 | 0.6982 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gomaa Haroun, A.H.; Li, Y.-Y. Ant Lion Optimized Fractional Order Fuzzy Pre-Compensated Intelligent Pid Controller for Frequency Stabilization of Interconnected Multi-Area Power Systems. Appl. Syst. Innov. 2019, 2, 17. https://doi.org/10.3390/asi2020017
Gomaa Haroun AH, Li Y-Y. Ant Lion Optimized Fractional Order Fuzzy Pre-Compensated Intelligent Pid Controller for Frequency Stabilization of Interconnected Multi-Area Power Systems. Applied System Innovation. 2019; 2(2):17. https://doi.org/10.3390/asi2020017
Chicago/Turabian StyleGomaa Haroun, A. H., and Yin-Ya Li. 2019. "Ant Lion Optimized Fractional Order Fuzzy Pre-Compensated Intelligent Pid Controller for Frequency Stabilization of Interconnected Multi-Area Power Systems" Applied System Innovation 2, no. 2: 17. https://doi.org/10.3390/asi2020017
APA StyleGomaa Haroun, A. H., & Li, Y.-Y. (2019). Ant Lion Optimized Fractional Order Fuzzy Pre-Compensated Intelligent Pid Controller for Frequency Stabilization of Interconnected Multi-Area Power Systems. Applied System Innovation, 2(2), 17. https://doi.org/10.3390/asi2020017