1. Introduction
A steady increase is observed in the demand for sophisticated products that integrate tangible micro-features, including micro-channels, micro-reactors, micro-molds, and micro-nozzles. Micro-machining processes, such as micro-turning, micro-grinding, and micro-milling, are among the options for creating micrometer-sized micro-product features. The products are utilized extensively in microelectromechanical systems (MEMSs), biomedical devices, and surgical instrumentation [
1]. Micro-milling is considered the most favorable micro-machining technique for creating micro-products. The technique delivers high precision, notably, when working with high-strength materials [
2], and it gives flexibility for an efficient machining process [
3]. Micro-milling is a machining technique that involves the removal of material using a downsized milling tool with a diameter of less than 1 mm [
4] and a cutting-edge radius of approximately 2
m [
5]. Micro-milling can produce complex 3D geometries in various materials. However, micro-milling requires tight machining monitoring due to some specific problems. Rapid tool wear [
6], premature tool breakage [
7], tool deflection [
8], tool run-out [
9], and plowing [
10] are the primary specific problems in micro-milling, and they have a negligible effect on macro-milling as a counterpart. The presence of tool wear has been identified as a significant factor leading to poor results in micro-milling, namely, in terms of low accuracy and surface integrity [
11]. Thus, an integral tool condition or wear monitoring (TCM or TWM) system is required to guarantee that the micro-milling operates within the specified permissible conditions. A TWM system is a system that provides information on tool wear progression during the machining process. The wear progression information can be used to notify the machining operator (user), automatic process control, quality control, and other services. The term TCM (tool condition monitoring) is used interchangeably with TWM (tool wear monitoring) in the literature.
On the other hand, digital twin (DT) technology has recently become widely recognized as significant in manufacturing, particularly within the Industry 4.0 ecosystem. DT was defined as “
a set of virtual information constructs that fully describes a potential or actual physical manufactured product from the micro atomic level to the macro geometrical level” [
12]. The initial idea of the DT is to be able to design, test, manufacture, and use a virtual version of systems. A DT reduces physical system failures, costs, time, and user damage when deployed and in use. For the TWM field, DT technology is considered a potential breakthrough in developing a prognostic TWM system, as it enables the tracking, monitoring, and prediction of tool condition dynamics through the execution of digital twin processes in real time. As a result, the machining operator can identify tool abnormalities using the anticipated tool condition provided by the TWM system. This preventive approach enables the operator to mitigate the likelihood of catastrophic events that could compromise the final micro-product’s quality. Until recently, very limited studies have applied digital twin technology for monitoring tool wear in the micro-milling field.
A TWM-DT system is a system that uses DT technology as the basis to provide information on tool wear progression during the machining process. Several prior studies in the literature specifically discuss the use of DT technology to address the TWM problem, primarily in general machining [
13,
14,
15]. Qiao et al. developed a TWM-DT system using Deep Stacked GRU to simulate the underlying tool wear growth [
13]. Xie et al. explored a proposed TWM-DT model based on a Long Short-Term Memory (LSTM)–Recurrent Neural Network (RNN) [
14]. Xie et al. also presented TWM-DT development focused on modeling, application, and service strategies for a cutting tool [
15]. These TWM-DT systems relied heavily on data-driven methods to provide TWM service within a DT application. “Black-box” models that depicted the correlation between sensor data and wear values constituted the model of the physical object. The fundamental concept of a DT, which involves a realistic model and real-time data on physical entities, has been only loosely implemented. These systems are more comparable to general data-driven TWM systems, e.g., the systems proposed by Twardowski et al. [
16] and Shen et al. [
17], than a DT-based TWM system.
On the other hand, a TWM-DT system has an alternative of making a virtual model of the targeted physical entities by employing long-studied physical laws, e.g., the mechanistic law (model) governing the macro-/micro-milling process. Only a limited number of works have taken advantage of the mechanistic law in developing a model of a DT in the context of TWM-DT development in the micro-milling field. Our prior research works were regarded as an initiative in developing a real physics-driven TWM-DT system for micro-milling. The works contain a formulation of a DT model based on the mechanistic law of micro-milling [
18]. The proposed system also used open-source CAD software to visualize the micro-tool motion and compute the material removal rate based on the tool–workpiece immersion volume [
19]. More research is required to demonstrate the benefits of DT technology for the TWM issue, particularly in the micro-milling domain.
This paper introduces a tool wear monitoring (TWM) system designed for the micro-milling process, and it utilizes digital twin (DT) technology in conjunction with the Extended Kalman Filter (EKF). This paper also describes the DT model employed in the real-time DT process and the approach to incorporating the EKF-based TWM to provide wear information throughout the machining process. The TWM method was developed based on the EKF, a nonlinear estimation framework with a “predict–update” style appropriate for real-time DT processes. Details of process pipelines are also explained to create a realistic DT for the micro-milling process. Eventually, this paper explains the TWM service that can be delivered using the wear estimate from the EKF-based TWM and standard/normal wear categorization provided by the user. The presentation of this paper is structured in the following manner.
Section 1 addresses the importance of TWM, particularly in a micro-milling process. This section also elaborates on the systems proposed in the past related to TWM with future opportunities and new strategies using digital twin technology.
Section 2 presents a literature review of DT technology and explains the relation to the needs of TWM.
Section 3 presents our formulation for developing the DT model for the micro-milling process.
Section 4 shows the details of the EKF-based TWM. This section describes how the EKF seamlessly integrates the data from sensor measurements and virtual micro-milling resources within a DT to produce the wear estimates.
Section 5 illustrates an experimental setup for an actual micro-milling process.
Section 6 discusses the validation of the DT model and the performance of the proposed EKF-based TWM. The concluding remarks of this research are provided in
Section 8.
3. Digital Twin Modeling of Micro-Milling
DT modeling is a crucial step in clearly defining the core parts required by DT technology before the implementation step in the development of DT applications. As stated earlier, the basic concept of the DT model contains three core parts, i.e., physical products, virtual products, and data communication between the virtual and physical products [
20].
Figure 1 depicts the description of the DT model in our work.
Physical resources are the physical products inside the micro-milling environment that have a direct relation to the mechanistic aspect of the micro-milling, e.g., micro-milling machine, cutting tool, jig, and workpiece.
Virtual resources are the twin, counterpart, or one-to-one mapping of the physical resources in the form of virtual products. In virtual space, each virtual resource is modeled according to its information dimension:
geometry,
physics, and
behavior, as similarly proposed by Tao et al. [
34].
Geometry represents the shapes and dimensions of a real physical resource. It is mainly acquired and already available from our virtual environment’s CAD (computer-aided design) files.
Physics describes the physical characteristics and properties of the physical resource.
Behavior models the dynamic response of the physical resource under external and internal mechanisms. In this work, we focus mainly on the behavior model of the virtual resource. Later, this
behavior model is simply called the
model. The further presentation of virtual resources discusses only a set of mathematical models representing the dynamics of physical resources.
3.1. Physical Resources
In order to provide prediction and control over the future states and behaviors of physical resources, the digital twin imitates all of the resources in the target application. Most digital-twin-oriented research works in the milling machining domain focus on creating the virtual resources of a CNC (computerized numerical control) machine [
27] or a cutting tool [
26]. Additionally, some works define the cutting tool as an integral component of the CNC machine model as one entity [
35]. The model boundary has been defined to cover only the micro-milling resources directly related to micro-milling’s mechanistic aspect. The model boundary reduces the complexity of the developed DT model.
Modern CNC milling machines are capable of generating five-axis tool motion. Generally, the spindle rotation speed for micro-milling is higher than 20,000 rpm. The spindle motor and axis actuators are connected to the main CNC controller through separate drivers and controllers. The relative motion between the rotating tool and the workpiece during the cutting process creates the dynamics of the micro-milling process, which significantly correlates with the progression of tool wear. The motion is regulated by the machine sub-resources, i.e., spindle motor, spindle controller, and feed-drive controller. The sub-resource dynamics serve as the foundation for developing the model for the micro-milling process. For this work, the workpiece and cutting tool are assumed to have only a
geometry model without a
physical and
behavior model. Their contribution to the micro-milling dynamics is mainly related to triggering the machining events, e.g., initial tool–workpiece contact during material removal. The physical resources of our proposed DT are shown in the upper part of
Figure 1.
3.2. Virtual Resources
The material removal is the central event in the micro-milling process. The mechanistic model, a physics-based approach, gives a significant focus on the fundamental mechanics of the cutting process, along with the variables that are linked to it, including the cutting force [
36] and torque [
37]. Cutting torque refers to the force exerted on the spindle motor shaft. The cutting torque derived from the mechanistic model is further extended when constructing the model of the spindle motor. The relation between the virtual resources describes the DT’s dynamics in the micro-milling process. The DT will have greater information if there are additional sub-models of the spindle motor, but the whole DT model will become more complex due to this effort. The trade-off may be assessed depending on the available resources and the intended applications.
Figure 2 describes the interactions between physical–virtual resources and the pipeline of calculating the micro-milling dynamics.
3.2.1. Model of the Spindle Motor
Cutting Torque
According to Altintas et al. [
38], the instantaneous cutting force
refers to the tangential cutting force, which can be determined by considering the uncut chip thickness
of the
j-th cutting edge, along with the feed per tooth
and the instantaneous angular position
, as represented by Equations (
1) and (
2). The cutting torque model is constructed based on Altintas’s cutting force model considering the tool radius
r as indicated in Equation (
3). Through a series of cutting experiments, the model coefficients (tangential cutting
and edge
) are calculated empirically [
39].
The effective cutting region for slot micro-milling is located on the half-side of the tool cross-section circle, as indicated by Equation (
5). The function
dictates that the computation is conducted within the practical boundaries of the material removal area. Hence, the average cutting torque per unit depth of cut
a for a single cutting tooth may be determined using Equation (
6). Equation (
7) summarizes the calculation for the total cutting torque
in slot micro-milling with the number of teeth
Z and the depth of the cut
a.
Wear Torque
The total average cutting torque is assumed to remain constant throughout the material removal, as expressed in Equation (
7). The formulation is a suitable approximation for short-distance machining. Nevertheless, our prior experiments showed a positive correlation between the rise of the total average cutting torque and the machining distance [
18]. During the machining operation, the total average cutting torque increases due to a progressive increase in the cutting radius of the worn tool. Therefore, the wear contribution should be addressed in the development of mechanistic models.
Several researchers have considered the tool wear variable in their mechanistic models. Niaki et al. suggested that the wear cutting force can be added to the existing cutting torque formulation by proportionally multiplying a constant
with the tool wear value [
40]. Tansel et al. improved the mechanistic models by introducing a multiplier
to the equation of the cutting force. The multiplier
is above 1 if the tool is worn [
41]. Nevertheless, their models were different from the results of our previous experiments. In our work, the tool wear contribution in the mechanistic model is represented by the wear torque
, as shown in Equation (
8), where
is the total cutting torque applied to remove the material. The wear torque forms an S-shaped profile as the tool wear progresses during the machining. In the DT’s run time, the wear torque
is applied only during the material removal. The wear torque coefficients
will be decided depending on the experimental data before the digital twin runs.
Motor Dynamics
The mechanical work at the output shaft of the spindle motor is produced by the electromagnetic work exerted by the armature, Equations (
10) and (
11). The magnetic flux of the spindle armature generates a certain rotational speed
in response to the supplied input voltage
V. The electrical dynamics of the armature are represented by an RL circuit model based on the armature resistance
R and inductance
L. Armature rotation also induces a back-EMF (electro-motive force) voltage
in the circuit, resulting in a negative voltage opposite to the supplied voltage. The back-EMF voltage is proportional to the angular speed of the armature (rotor) multiplied by the back-EMF constant
. The torque exerted at the spindle shaft’s end is proportional to the torque parameter
multiplied by the armature current
i (Equation (
12)). During the material removal in the machining process, the effective torque is the difference between the torque
T and the cutting torque
. The parameters
J and
B represent the armature’s inertia and friction coefficient, respectively.
3.2.2. Model of the Spindle Controller
During the material removal, the cutting torque
exists as an external disturbance for the spindle motor that eventually reduces the spindle speed. The spindle controller implements a specific speed-control strategy to keep the targeted spindle speed steady under various disturbances. The control strategy uses feedback to compensate for the speed error (discrepancy). The construction of a micro-milling DT model must consider the interaction between the spindle motor and its controller with the existence of cutting torque in a closed-loop system. In this work, the spindle controller uses the PID control strategy to achieve the targeted spindle speed
. PID control is the most implemented control strategy for various industrial applications, as stated in a review by Borase et al. [
42].
The model of the spindle controller is developed based on PID control. The cutting torque
is compensated based on the amount of speed error
multiplied by the PID parameters (proportional
, integral
, and derivative
) to maintain the targeted spindle speed
. The regulated voltage
V triggers the spindle dynamics electrically to adjust the armature current
i so that the appropriate spindle torque
T is produced. The PID control law is shown in Equations (
13) and (
14).
3.3. Machining Events of the Micro-Milling Process
The DT process takes the machining parameters as the inputs to calculate the spindle torque
T and current
i through the models defined in Equations (
1)–(
15). In this work, the machining parameters are the feed per tooth
and the spindle speed
. The DT process also requires real-time signals from physical resources to process the realistic sequence of actual events. The definition of events follows the standard events in a slot micro-milling process that can be considered as a piecewise unit of more complex micro-milling. In slot micro-milling, a cutting event happens when the rotating tool moves toward the fed workpiece and vice versa, causing the material to be removed. Before and after the full cutting event, the micro-milling experiences starting and ending contact events for a very short time, resulting in a transient profile in the cutting torque. The other non-cutting events include spindle motor on–off events, spindle torque rise–idle events, and feeding on–off events.
Figure 3 shows the profile of the torque
T experienced by the spindle motor. The torque value fluctuates during the machining process depending on the ongoing event. The interaction between the available signals from the spindle controller, the feed-drive controller, and the physical contact detector are taken into account in Equation (
10), resulting in a more realistic formalism, as shown in Equation (
15). The spindle
, feeding
, and contact
signals are defined in Equations (
16)–(
18), respectively.
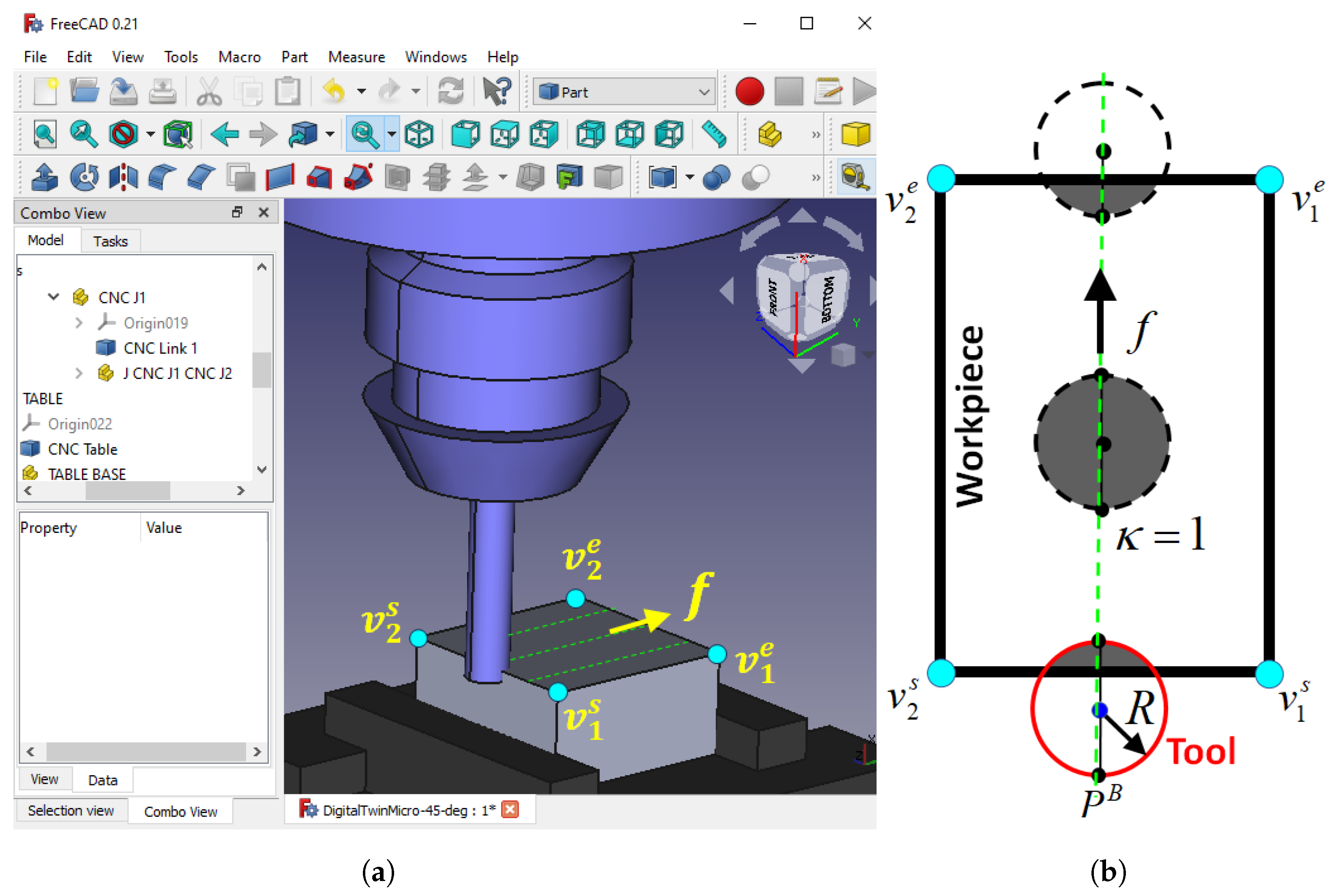
The physical contact detector generates the contact signal
by monitoring the collision between the 3D virtual models of the tool and workpiece inside an open-source CAD system called FreeCAD [
43]. The position of the virtual model inside the FreeCAD virtual environment is updated regularly following the real-time position from the feed-drive controller [
19]. The collision volume
reported by the collision detection module of FreeCAD becomes information for judging whether tool–workpiece contact occurs; see Equation (
18) and
Figure 4a. For machining with simple workpiece geometry (see
Figure 4b), the physical contact detector may use the information of machined surface vertexes (cyan dots) together with the feeding motion direction
. A contact event can be detected by checking whether the tool perimeter (red circle) is inside or outside the machined surface; see Equations (
19) and (
20). The contact signal
is generated by evaluating the six cases in Equation (
21).
8. Conclusions
A novel tool wear monitoring (TWM) system for micro-milling machining based on digital twin (DT) technology has been presented. A DT model of the micro-milling process was constructed to imitate the micro-milling dynamics. The Extended Kalman Filter (EKF) was selected as the framework to create seamless data integration for tool wear monitoring. The EKF-based TWM continuously used the micro-milling DT variables and the real-time data from sensor measurements to provide wear progression information on the cutting tool. The TWM service ran concurrently with a DT of the process of micro-milling. The TWM service notified about wear-related events based on wear estimates from EKF-based TWM and the standard/normal wear categorization from the user. The notifications from the TWM system str expected to assist users in making decisions related to machining processes. Further, corrective and preventive actions can be planned by users to control ongoing machining processes and to achieve the specified quality of the machined workpiece.
The performance of EKF-based TWM was tested by using four datasets of slot micro-milling machining. The EKF-based TWM system successfully produced good information on the wear estimates with a maximum error mean of 0.038 mm (for two teeth of the cutting tool) with respect to the actual wear value. The EKF wear estimates in all datasets adhered to an S-shaped profile of tool wear progression. In addition, the EKF-based TWM adapted to the machining parameters, e.g., the feed rate f. In the fourth dataset, the EKF-based TWM system consistently showed good wear estimates even though the feed rate f was set higher than the feed rate in other datasets. According to this result, retraining of the model parameters was not needed if the machining parameters changed. The contributions and novelties of our work in this paper can be summarized as follows:
Development of an architecture for a micro-milling DT that imitates micro-milling dynamics.
Development of a DT model of micro-milling by using the physical laws of a spindle motor, a spindle controller, and the cutting torque.
Implementation of a realistic virtual machining process by defining micro-milling events to enable a continuous DT process and TWM service across machining events.
Implementation of seamless data integration between DT variables and real-time data by using an EKF framework.
Development of a TWM service to notify users about wear-related events so that they can plan preventive and corrective actions to control the machining process and to achieve the specified machining quality.
Experimentation, validation, and evaluation of the proposed TWM system through actual slot micro-milling sessions.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}