1. Introduction
As a new type of morphing aircraft integrating vertical take-off and landing with high-speed cruise capabilities, tilt-rotor UAVs have significant application potential in urban air traffic and inter-regional rapid transportation scenarios [
1,
2]. Advantages such as a large load capacity and high maneuverability also conform to the current development concept of the low-altitude economic industry and have broad developmental prospects [
3,
4,
5]. However, modifying the configuration of tilt-rotor UAVs is relatively complicated [
6,
7,
8]. When such aircraft transition from the hover phase to the cruise phase, the nacelle angle and flight speed undergo a wide range of changes, posing a great challenge to flight safety.
The transition corridor is an effective means of characterizing the controllable flight state and safe flight boundary of the tilt-rotor UAV transition phase. The transition corridor refers to the set of flight status points permitted for the tilt-rotor UAV during the transition phase. Various studies have explored the transition corridor of tilt-rotor UAVs. For instance, Chen et al. [
9] calculated the low- and high-speed section boundaries of the transition corridor in accordance with the aircraft’s angle and power constraints. This approach enabled the determination of the two-dimensional transition corridor of the aircraft. Song et al. [
10] constructed a transition corridor for a tilt-rotor UAV by prioritizing the low- and high-speed boundaries of the aircraft, and corrected the corridor boundaries using the power constraints of the aircraft. Zhang et al. [
11] established a transition corridor for a tilt-rotor quadrotor aircraft by considering the limitations imposed by the stall of the wing, the dynamic stability, the flight power, and the blade loads. Yu [
12] constructed a more stringent safety margin corridor based on the safety range of the state quantity. The transition corridors considered in the above studies are all trim transition corridors. The transition corridors considered in the above studies are all trim transition corridors. Every trim point within the corridor keeps the aerodynamic force and pitching moment of the tilt-rotor UAV unchanged. However, this method ignores the dynamic characteristics of the transition phase. Many studies have explored transition corridors that relax the trim conditions. May et al. [
13] solved the transition corridor of a tilt-rotor UAV by combining the optimal control idea and reachable set theory for a longitudinal tilt-rotor UAV. Cheng et al. [
14] designed a three-dimensional transition corridor for a tail-sitter aircraft, considering acceleration changes while maintaining a constant altitude. Although the above studies considered the effect of acceleration on the transition corridor, the direction of the flight velocity was not considered. Therefore, the solved corridors had relatively small ranges. The characterization of permissible states in the transition corridor requires further exploration.
The transition corridor represents the possible trajectory range of tilt-rotor UAVs. However, in actual flight, it is essential to select the most reasonable trajectory that ensures the robustness of the transition phase. Several scholars have researched methods of obtaining the transition trajectories of tilt-rotor UAVs based on transition corridors. For example, Xiao [
15] calculated the flight state at typical nacelle angles in the transition phase and obtained the trajectory in segments according to the index requirements. Zuo [
16] determined the transition trajectory of a tilt-rotor UAV based on the range of the transition corridor and the safety margin. In recent years, many researchers have used artificial intelligence to determine trajectories based on transition corridors. Jeongseok et al. [
17] used a genetic algorithm and a stochastic gradient algorithm to optimize the transition trajectory using the minimum input as a metric. Hyun et al. [
18] and Lyu et al. [
19] employed an ant colony algorithm to optimize the trajectory of a box-wing aircraft and a tilt quad rotor. Zhang et al. [
20] modified the A* algorithm to determine the globally optimal trajectory based on a bespoke path performance metric function. Chen et al. [
21] used a method combining simulated annealing with a genetic algorithm to solve the optimal transition trajectory. The state points of the traditional transition corridor consider the balance of forces and moments at each static flight point. However, during actual flight, the aircraft’s velocity changes, and the two-dimensional transition corridor does not fully characterize all the information relevant to the transition phase. While some studies have considered the case of an aircraft accelerating horizontally, they typically do not incorporate the case of aircraft climbing or dropping significantly during the transition phase.
This paper proposes a characterization method for the transition corridor. The transition corridor is obtained by relaxing the trim conditions of the tilt-rotor UAV in the horizontal and vertical directions, considering the longitudinal acceleration. Based on this, a transition phase trajectory optimization method is established. The main contributions of this paper are as follows:
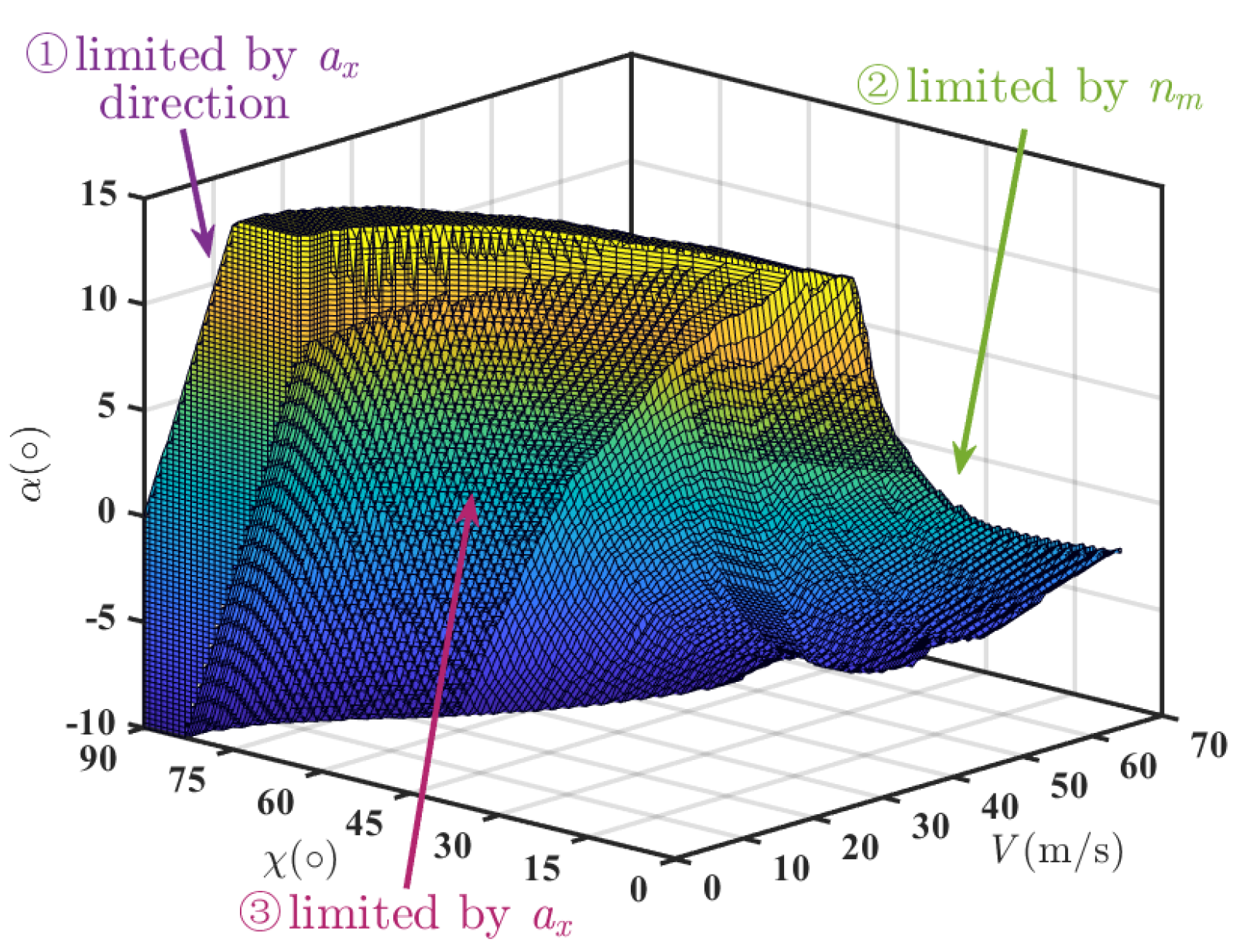
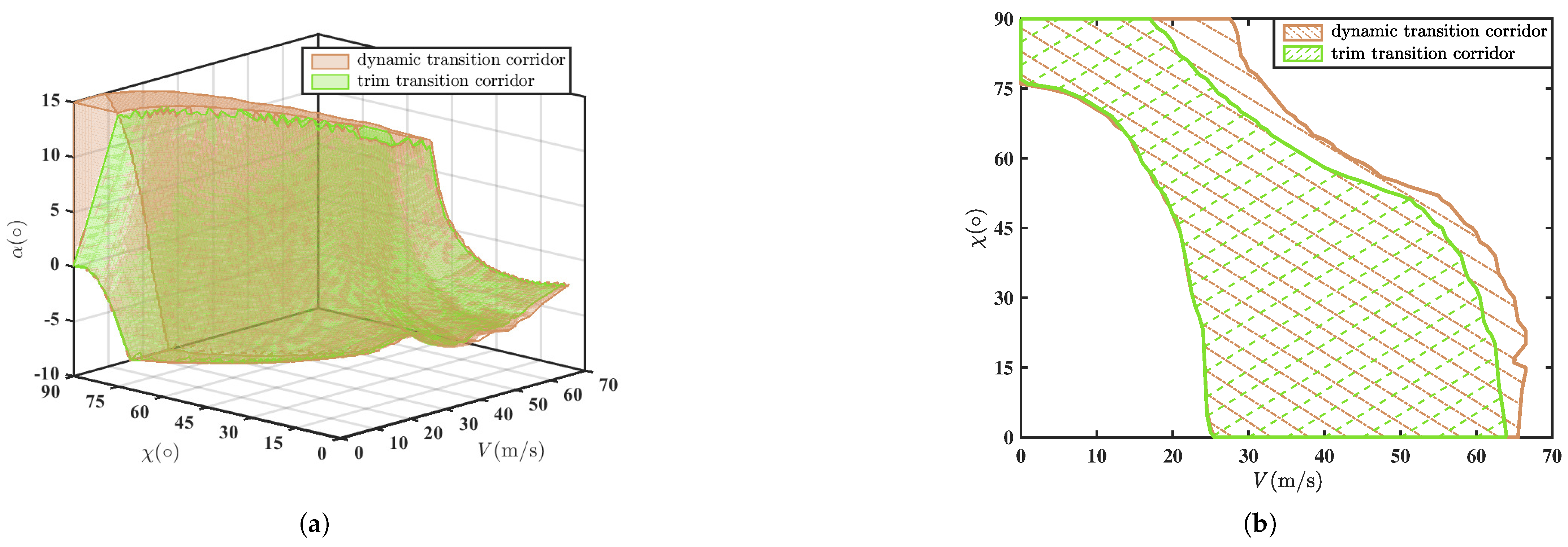
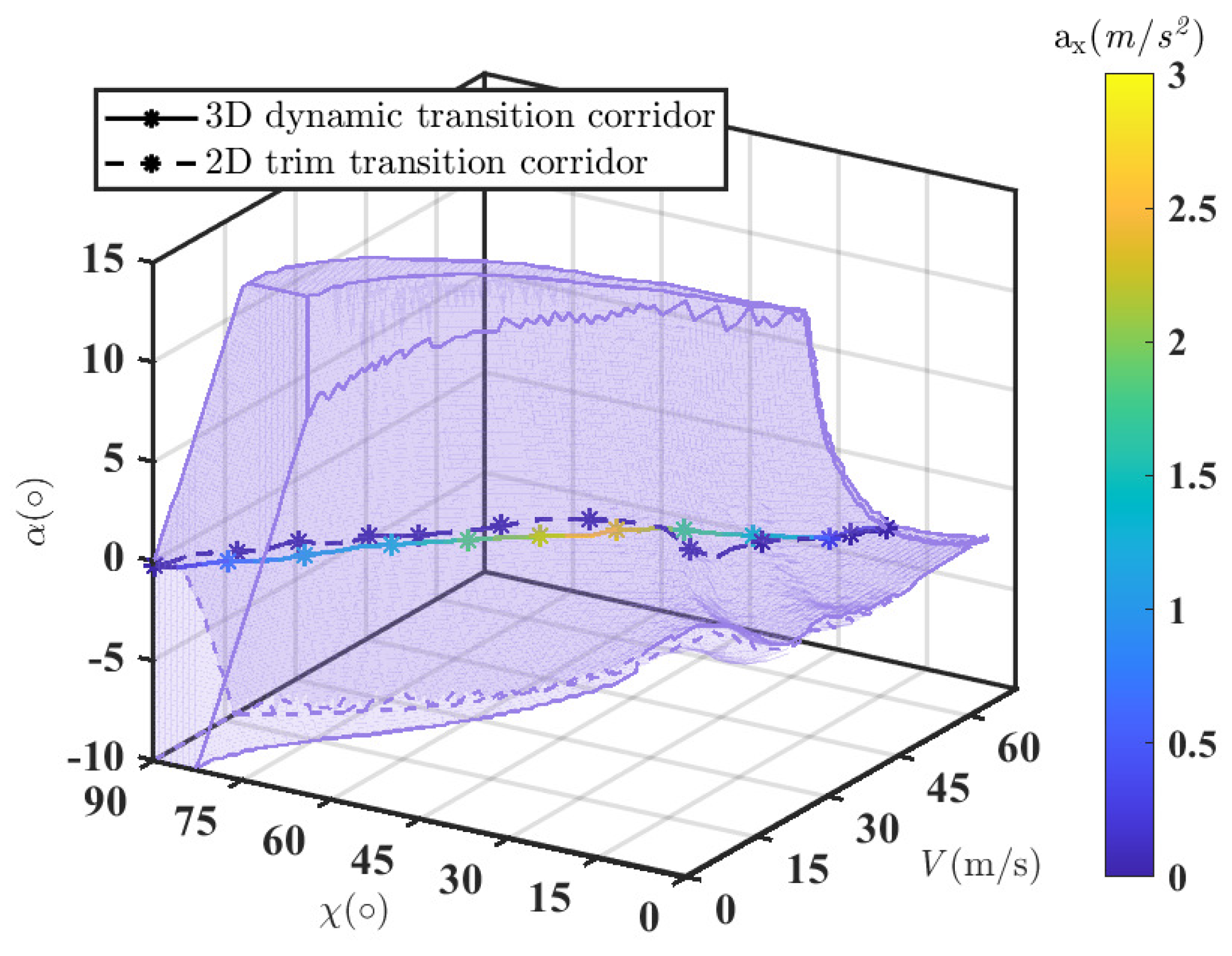
(1) Aiming at solving the problem whereby the two-dimensional trim transition corridor struggles to characterize the dynamic characteristics of the transition phase, resulting in deviations in the flight boundary characterization, a dynamic transition corridor characterization method for the transition phase of a tilt-rotor UAV is proposed. A three-dimensional transition corridor considering the nacelle angle, velocity, and angle of attack (AoA) is established to characterize the dynamic characteristics of acceleration and deceleration during the transition phase.
(2) Aiming at achieving the smooth transition of tilt-rotor UAVs, a transition trajectory optimization method based on the three-dimensional dynamic transition corridor is proposed. This method uses pigeon-inspired optimization (PIO) to accurately balance the nacelle angle, velocity, and AoA requirements in the transition from the hover phase to the cruise phase and vice versa.
The remainder of this paper is organized as follows. In
Section 2, a three-degrees-of-freedom model of a tilt-rotor UAV is developed.
Section 3 describes the trim transition corridor, followed by
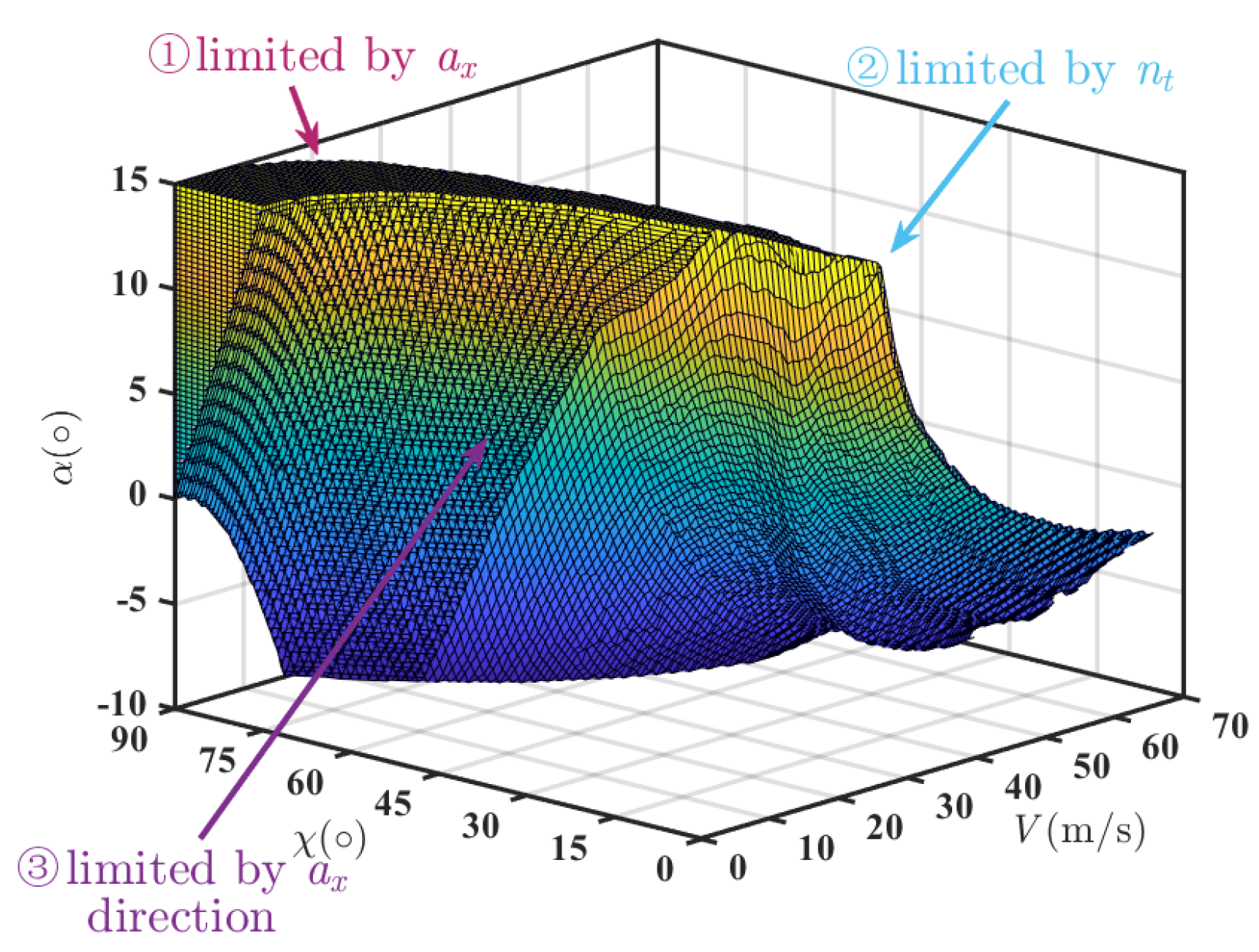
Section 4, which presents the three-dimensional dynamic transition corridor for the hover-to-cruise and cruise-to-hover phases.
Section 5 applies the PIO algorithm to determine the trajectory during the transition phase. Finally,
Section 6 concludes this paper.
5. Transition Trajectory Optimization
The optimal transition path can be determined using the transition corridor obtained in the previous section. In this section, the PIO algorithm is employed to identify the optimal path.
5.1. PIO Algorithm
The PIO algorithm is modeled on the homing behaviors of pigeon flocks [
22], whereby these homing instincts are used to find the optimal solution of a trajectory. The algorithm is divided into two main parts: a map and compass operator and a landmark operator.
(1) Map and compass operator: Pigeons are oriented in the pre-homing period mainly by magnetic sensing. For the trajectory solution problem, each pigeon represents a feasible solution. Each feasible solution has a corresponding position and velocity, denoted as
and
where
stands for the number of pigeons and
D stands for the number of dimensions for a pigeon. The position and velocity of the individual are updated with each iteration. In the
t-th iteration, the position
and velocity
of each individual are calculated as follows:
where
R is the map and compass factor, rand is a random number between 0 and 1, and
is the current global optimal position. The position of the pigeon with the best fitness value in the current pigeon flock is taken as the current global optimal position. This iterative process is repeated
times before stopping and passing the resulting
to the landmark operator to continue the operation, where
is the maximum number of iterations of the map and compass operator.
(2) Landmark operator: In the later stages of homing, as the pigeon flock gradually approaches its destination, it navigates using familiar landmarks in the vicinity. The fitness value of each pigeon is calculated by the cost function
, and the top half of the pigeons with the better fitness value is selected to calculate the center of the flock position
. Using
as the reference direction, the position of each pigeon is updated according to the following equation:
The landmark operator stops running after the iterative loop reaches
times, where
is the maximum number of iterations of the landmark operator.
5.2. Algorithm Implementation
For the trajectory optimization problem of a tilt-rotor UAV, each pigeon represents a trajectory. The number of state points selected for the transition trajectory is set. To achieve a comprehensive characterization of the transition trajectory, the feasible solution should include all information on the nacelle angles, velocities, and AoAs. Thus, the dimension of each pigeon is
, and its composition is
where
,
, and
represent the velocity, nacelle angle, and AoA corresponding to the
i-th state point. The initial and final state points of the transition phase are already determined, so the velocity and nacelle angle ranges for the transition trajectory are
and
. Considering that the velocity and nacelle angle of the aircraft vary monotonically during the transition phase, these values should be sorted accordingly during the initial pigeon flock generation process to improve the optimization efficiency. The objective function, i.e., fitness function, is based on the three-dimensional dynamic corridors. Considering the attitude and smoothness requirements of the aircraft during the transition phase, the cost function is as follows:
where
represents the desired AoA corresponding to the current nacelle angle and
–
represent the various weighting coefficients of the objective function. The initial two terms in Equation (
19) represent the sum of the squares of the differences in velocity and nacelle angle between two adjacent state points. The purpose is to maintain uniform intervals between the selected state points and to prevent sudden changes in velocity and nacelle angle (see
Appendix A for the detailed proof process). The third term represents the difference between the current AoA and the desired AoA. To ensure that the aircraft can be trimmed under different nacelle angles and velocities during the transition phase, the velocity range of the dynamic transition corridor must be the same as that of the three-dimensional trim transition corridor, i.e.,
, where
and
represent the lowest and highest velocity that can be trimmed under the nacelle angle in the three-dimensional trim transition corridor, respectively.
The specific implementation of the PIO algorithm for the transition phase trajectory of the tilt-rotor UAV is described below:
Step 1: Initialize the algorithm parameters.
Step 2: Input the position and velocity information of the initial flock. Compare the fitness value of each pigeon to find the current optimal path.
Step 3: Update the position and velocity of each pigeon according to Equations (
13) and (
14). Compare the fitness values of all pigeons and reorder them to find the new best position.
Step 4: If the number of iterations has not reached the maximum number of iterations of the map and compass operator, repeat step 3; otherwise, proceed to step 5.
Step 5: Find the center position of the best-adapted pigeon according to Equation (
16). Adjust the speed of the pigeon flock according to Equation (
17). For some less-adapted individuals in the flock, the initial values are regenerated to participate in the calculation, keeping the number of pigeons constant.
Step 6: If the number of iterations has not reached the maximum number of iterations of the landmark operator, repeat step 4; otherwise, stop the operation and output the result.
The landmark operator has been modified in step 5 by initializing the second half of the flock, which is poorly adapted, and by introducing new information to prevent the optimized trajectory from becoming trapped around a local optimum.
5.3. Optimization Results
The number of state points is set to
. In order to strike a balance between the optimality of the results and the efficiency of the optimization process, the number of pigeons is set to
; the map and compass factor is set to
; and the maximum numbers of iterations for each stage are set to
and
. The nacelle angle and AoA in the hover state are set to
, and
. The nacelle angle, velocity, and AoA in the cruise state are set to
,
= 42.5 m/s and
. The desired transition AoA is set to
and the expected nacelle angles of the high AoA flight range are set to
and
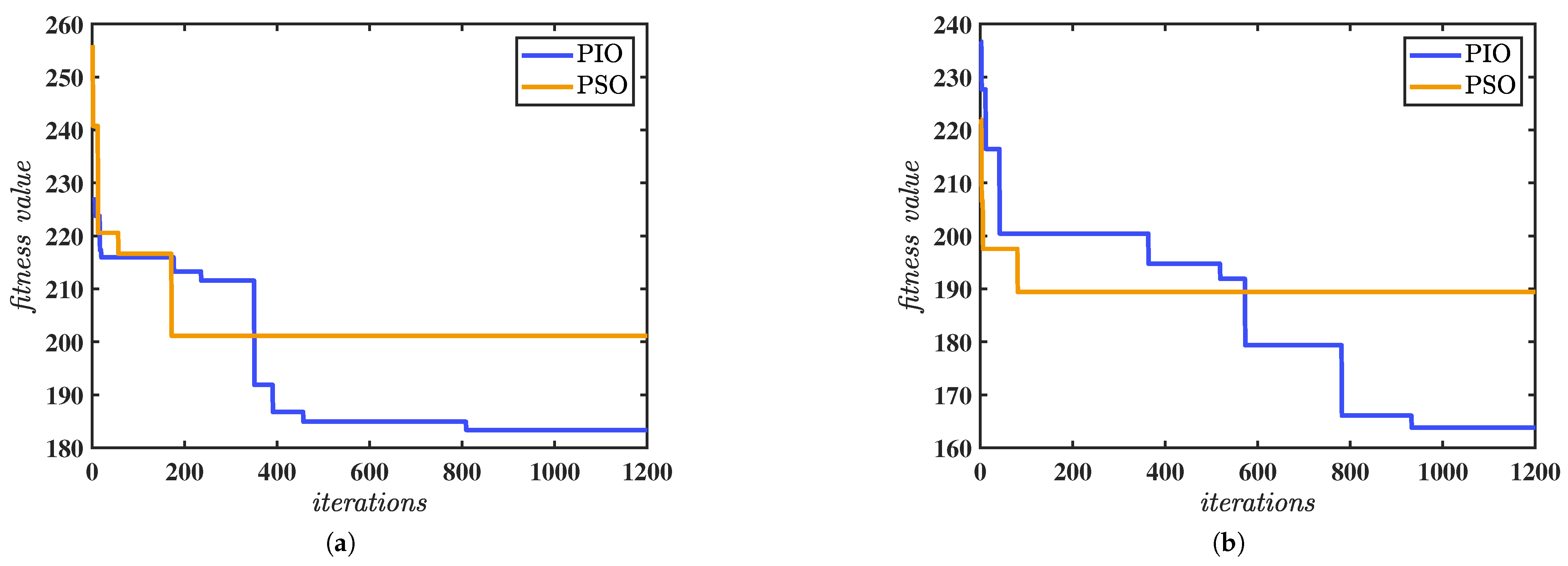
. The PIO algorithm and the particle swarm optimization (PSO) algorithm are compared by using the same populations and iterations.
Figure 10 shows the changes in the fitness value of two algorithms during the optimization process. As shown in
Figure 10, despite the PIO algorithm exhibiting a convergence speed that is lower than that of the PSO algorithm, its optimization result possesses a lower fitness value, and the obtained trajectory meets the requirements better.
5.3.1. Optimization Results for Hover-to-Cruise Phase
The optimized transition trajectory obtained from the hover-to-cruise dynamic transition corridor is shown in
Figure 11. This figure illustrates the change in forward acceleration of the tilt-rotor UAV during the hover-to-cruise phase. For the hover-to-cruise phase, the aircraft acceleration mainly changes when
. This is because acceleration can bring the AoA closer to the desired AoA.
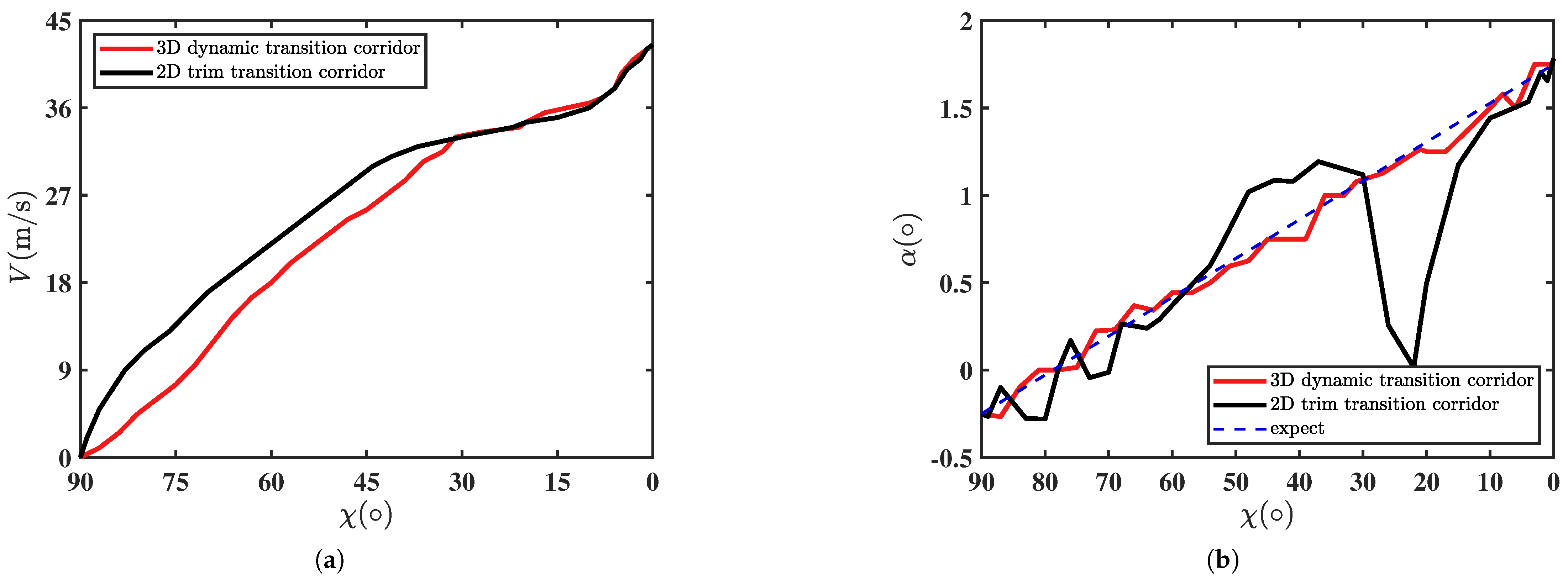
Figure 12 shows the variations in velocity and AoA with respect to the nacelle angle during the hover-to-cruise phase. Compared with the transition trajectory obtained using the two-dimensional trim corridor, the optimized velocity based on the dynamic transition corridor varies smoothly with changes in the nacelle angle, and the gap between the optimized AoA and the desired AoA is relatively small. The AoA curve obtained by the two-dimensional trim transition corridor in
Figure 12b is significantly different from the expected AoA in the middle of the transition phase. This is because the aircraft must maintain an increase in its forward speed during the transition phase. Therefore, the AoA of the trim point selected in the trajectory is relatively large.
Figure 13 shows the variations in each control quantity with respect to the velocity during the hover-to-cruise phase of the tilt-rotor UAV. During the transition phase, each actuator has a sufficient control margin. The increase in the main propeller speed after optimization is due to the forward acceleration of the tilt-rotor UAV in the transition phase.
5.3.2. Optimization Results for Cruise-to-Hover Phase
The optimized transition trajectory obtained from the cruise-to-hover dynamic transition corridor is shown in
Figure 14. For the cruise-to-hover phase, the acceleration changes in the near-cruise phase. This is because, at the beginning of the transition phase, the aircraft’s AoA is expected to change rapidly and the aircraft will be able to fly at a larger AoA in a decelerated flight state.
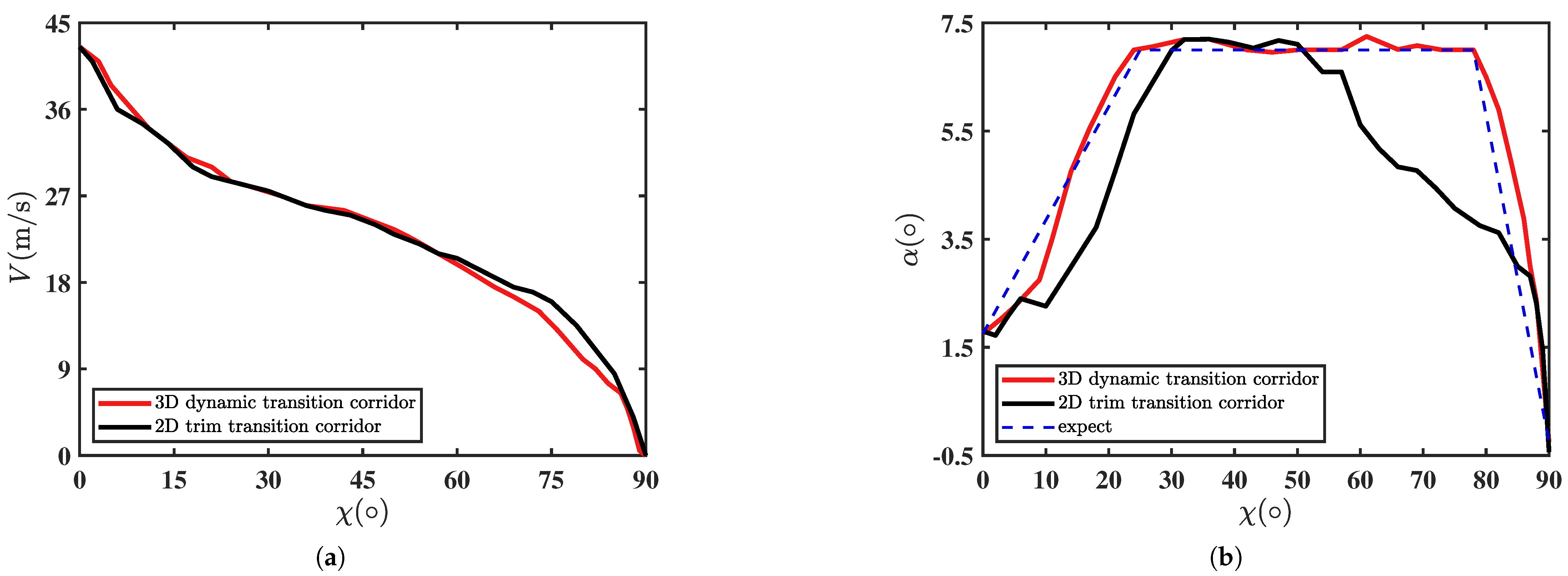
Figure 15 shows the variations in velocity and AoA with respect to the nacelle angle during the cruise-to-hover phase. Compared with the transition trajectory obtained based on the two-dimensional trim corridor, the velocity trajectories optimized based on the dynamic transition corridor vary more smoothly with changes in the nacelle angle. The optimized AoA achieves the desired value faster and the aircraft can fly with a larger AoA in the middle of the transition phase.
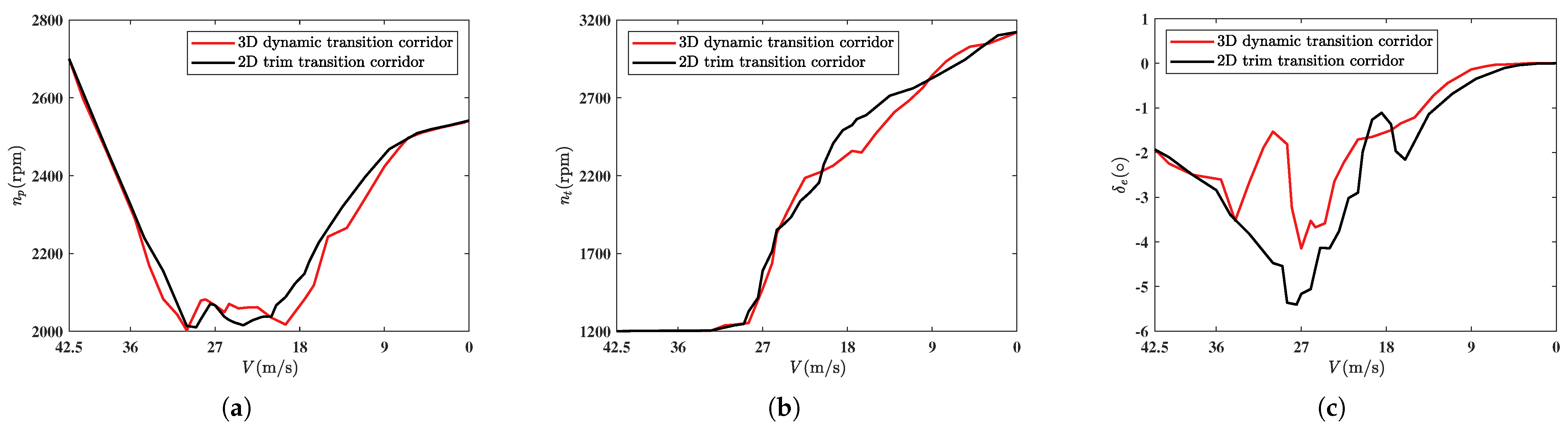
Figure 16 shows the variations in each control quantity during the cruise-to-hover phase of the tilt-rotor UAV. In the cruise-to-hover phase, each actuator has a sufficient control margin. During the pre-transition period, the main propeller speed is reduced due to the aircraft’s deceleration. Late in the transition phase, the optimized main propeller speed is less than the trajectory of the two-dimensional corridor. This is because the aircraft has a large AoA at this stage and the aerodynamic forces generated provide some of the lift.
6. Conclusions
This paper has described research on a characterization method for the transition corridor and an optimization method for the transition trajectory of tilt-rotor UAVs. First, a component modeling method was used to model the tilt-rotor UAV. Based on this, a dynamic transition corridor characterization method considering the dynamic characteristics of acceleration and deceleration during the transition phase was proposed. Based on the established three-dimensional dynamic transition corridor, a transition trajectory optimization method was derived using the PIO algorithm. Numerical simulations have shown that, compared with the transition trajectory obtained based on the two-dimensional transition corridor, the proposed method ensures smoother changes in the velocity, nacelle angle, and expected AoA during the transition phase. The research results provide a solid foundation for the study of transition phase control strategies.
In the future, we first study the trajectory optimization method for the uncertain dynamic model of the tilt-rotor aircraft, including the optimization analysis of the modeling uncertainty of each aircraft component and the uncertainty of the flight environment. Secondly, we will analyze the structural load distributions on key components during the transition phase. In addition, more flight tests for the transition phase will be conducted.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}