Abstract
This review explores the evolution and current state of aerial drones’ use in geophysical mining applications. Aerial drones have transformed many fields by offering high-resolution and cost-effective data acquisition. In geophysics, drones equipped with advanced sensors such as magnetometers, ground-penetrating radar, electromagnetic induction, and gamma-ray spectrometry have enabled more precise and rapid subsurface investigations, reducing operational costs and improving safety in mining exploration and monitoring. Over the last decade, advances in drone navigation, sensor integration, and data processing have improved the accuracy and applicability of geophysical surveys in mining. This review provides a historical overview and examines the latest developments in aerial drones, sensing technologies, data acquisition strategies, and processing methodologies. It analyses 59 studies spanning 66 drone-based geophysical applications and 63 geophysical method entries, published between 2005 and 2025. Multirotor drones are the most common, used in 72.73% of cases, followed by fixed-wing drones (12.12%), unmanned helicopters (9.09%), hybrid VTOL designs (3.03%), airships (1.52%), and one unspecified platform (1.52%). In terms of geophysical methods, magnetometry was the most frequently used technique, applied in thirty-nine studies, followed by gamma-ray spectrometry (eighteen studies), electromagnetic surveys (five studies), and ground-penetrating radar (one study). The findings show how drone-based geophysical techniques enhance resource exploration, safety, and sustainability in mining.
1. Introduction
The mining industry’s need for safer, cost-effective exploration has led to the adoption of aerial drones with advanced geophysical sensors. Traditional ground-based geophysical surveys often face significant challenges, including difficult terrain, accessibility limitations, and high operational costs. Aerial geophysics, particularly using drones, presents an innovative solution that enhances data acquisition capabilities while minimising risks to human operators.
Among the most promising applications of aerial drones in mining exploration and monitoring are aerial magnetometry, ground-penetrating radar (GPR), electromagnetic (EM) surveys, and gamma-ray spectrometry. These techniques enable the high-resolution mapping of subsurface structures, mineral deposits, and environmental hazards with unprecedented efficiency. Aerial magnetometry provides crucial insights into geological structures and mineralisation patterns, while GPR enhances subsurface imaging for the detection of faults, voids, and buried features. EM surveys contribute to the identification of conductive ore bodies, and gamma-ray spectrometry facilitates the assessment of radioactive elements and mineral compositions critical for resource evaluation.
Integrating geophysical techniques with drone technology has transformed mineral exploration, enabling faster surveys, broader coverage, and higher data accuracy. Furthermore, the combination of drone-based geophysics with modern data processing techniques, such as machine learning and geospatial analytics, paves the way for more precise and automated mineral assessments.
This paper reviews advancements in drone-based geophysical techniques for mining, focusing on their role in improving exploration, reducing environmental impact, and enhancing safety. By bridging technological innovation with geoscience, the utilisation of drone-based geophysics marks a significant step forward in the pursuit of more sustainable and efficient mining practices.
In fact, aerial drones are essential in modern mining operations. The mining process is commonly divided into three main phases: (i) exploration, (ii) exploitation, and (iii) restoration [1]. During the exploration phase, the first and most critical stage in a mining activity, the identification and evaluation of potential mineral deposits is essential to define the economic viability and ensure efficient resource extraction. In this sense, aerial geophysics plays a crucial role by providing high-resolution subsurface data over large areas efficiently and cost-effectively. By deploying sensors on aerial drones or aeroplanes, it is possible to cover vast and inaccessible areas rapidly, enhance decision-making for planning drilling and sampling operations, and reduce exploration costs compared to traditional ground surveys [2,3].
During the extraction phase, minerals are mined, processed, and prepared for commercial use. This stage includes large-scale operations such as drilling, blasting, hauling, and ore processing. While aerial geophysics is primarily used in the exploration phase, it also plays a significant role in mining extraction. During this phase, these techniques help optimise mining operations, improve safety, and enhance ore recovery. In particular, aerial geophysics is used during mining extraction for the delineation of ore bodies and grade control, for structural mapping and slope stability monitoring, for real-time monitoring for adaptive mine planning, and to support dewatering strategies to prevent flooding in underground facilities [4,5].
Finally, in the restoration phase, also known as mine reclamation or closure, the goal is to restore the mined land to a stable, environmentally sustainable condition, ensuring minimal long-term environmental impact and compliance with regulations. In this stage, aerial geophysics is also vital for assessing environmental conditions and monitoring the rehabilitation progress to ensure the long-term stability of the restored mine. Aerial geophysical sensors can deliver high-resolution data that support land reclamation and environmental remediation efforts, guiding ecological recovery and enhancing long-term land sustainability [6,7].
In recent years, an increasing number of studies have been published on the use of aerial drones in geophysical surveys for mining. However, most existing reviews either focus on specific geophysical methods or discuss aerial drone applications in broader fields such as environmental monitoring or agriculture, without providing a mining-focused overview. This paper addresses this gap by providing a comprehensive review of aerial-drone-compatible geophysical methods, including their sensor integration, data processing workflows, and practical deployment in mining applications. To the best of our knowledge, this is the first review to systematically map the use of different types of aerial drones equipped with geophysical sensors in the mining sector while also highlighting the limited adoption of specific geophysical methods and identifying those for which no aerial-drone-based applications have yet been reported.
Based on the importance of the mentioned techniques across the full mining cycle, the primary objective of this paper is to review the use of aerial drones equipped with geophysical sensors in the mining sector. To address this objective, the relevant applications of aerial drone geophysical surveys were reviewed, and the following research issues were formulated:
- What are the primary types of aerial drones used for geophysical surveys in the mining industry, and what are their key advantages and limitations?
- Which geophysical sensors have been specifically developed or adapted for aerial-drone-based surveys in mining, and what are their operational constraints?
- What geophysical methods based on aerial drones have been used in the past decade?
- What criteria should be considered when selecting the most suitable aerial drone platform for a specific geophysical survey in the mining sector, considering factors such as survey scale, terrain, and sensor integration?
- What are the current challenges and limitations in aerial-drone-based geophysical surveys for mining applications?
The structure of this paper is organised as follows: Section 2 outlines the research methodology employed in this review. Section 3 discusses the types of aerial drones utilised in geophysical surveys applied in mining scenarios, highlighting their capabilities and limitations. Section 4 examines the geophysical methods enhanced by aerial drone integration, along with the data processing techniques specific to each method. Section 5 presents the main discussion, synthesising key findings related to the integration of aerial drones in geophysical applications for mining. It outlines the decision criteria for selecting aerial drone platforms, explores the role of aerial geophysics across the different phases of mining activity, and highlights the key challenges and limitations associated with drone-based geophysical data collection. Section 6 concludes this paper by summarising the overall findings, including the most commonly used geophysical methods and aerial drone types in mining applications.
2. Research Methodology
The eligibility of studies included in this review was determined based on the research questions formulated in the Introduction. Studies were considered eligible if they involved the use of aerial drones in geophysical surveys specifically related to mining. Studies were excluded if they focused solely on other domains such as agriculture, archaeology, or civil engineering or did not involve geophysical methods. Additionally, only studies that demonstrated the actual deployment or practical use of geophysical sensors mounted on aerial drones in mining-related scenarios were retained for analysis.
A comprehensive search was conducted across multiple databases to address the research objectives. The strategy comprised two approaches: systematic querying in Scopus, ScienceDirect, and MDPI and a manual search across review papers to extract relevant documents that might have been missed in the automated search.
Scopus, ScienceDirect, and MDPI were chosen as the primary platforms for systematic querying due to their extensive coverage of the scientific literature. An automated search strategy using relevant terms and filters was applied in these databases. The specific queries used for each geophysical application were as follows:
- Magnetometry: TITLE-ABS-KEY. (“Drone” OR “UAV”) AND (“Magnetometer” OR “Magnetometry” OR “Magnetic”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
- Ground-penetrating radar (GPR): TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Ground Penetrating Radar” OR “GPR” OR “Airborne GPR”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
- Electromagnetics: TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Electromagnetic” OR “AEM” OR “EM”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
- Gamma-ray spectrometry/radiometry: TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Gamma” OR “GRS” OR “Spectrometry”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
- Gravimetry: TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Gravimetry” OR “Gravimeter”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”)
- Seismic tomography: TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Seismic Refraction Tomography” OR “SRT” OR “Seismic Tomography”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
- Electrical resistivity tomography: TITLE-ABS-KEY (“Drone” OR “UAV”) AND (“Electrical Resistivity” OR “ERT” OR “Electrical Resistivity Tomography”) AND (“Mining” OR “Mineral Exploration” OR “Resources Exploration” OR “Survey”).
To ensure completeness, synonyms like “UAV”, “unmanned aerial vehicle”, and “drone” were included in the search terms.
For each study, we systematically extracted information regarding platform specifications, sensor characteristics, and the aim of the application. Our review adheres to the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. Following the PRISMA flowchart (Figure 1) [8], the gathered documents were refined through three steps: identification, screening, and eligibility. A total of 500 records were initially identified through database searches and manual sources. After removing 149 duplicate entries, 351 records were screened. Of these, 42 records, including review papers, book chapters, case reports, and communications, were excluded. The remaining 309 reports were sought for retrieval, with 14 reports not retrieved successfully. Subsequently, 295 reports were assessed for eligibility, resulting in the exclusion of 236 articles considered out of scope for this review. Ultimately, 59 papers were deemed eligible for review.
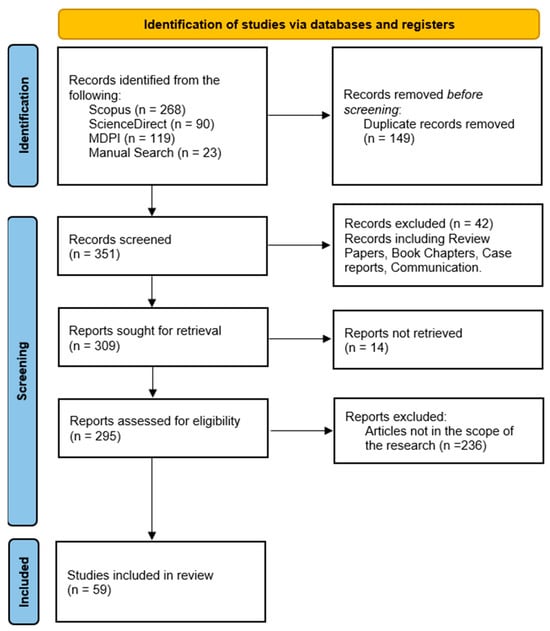
Figure 1.
Refinement of studies based on the PRISMA workflow.
3. Types of Aerial Drones Used in Geophysical Methods
The future prospects for drone technology in mineral exploration are incredibly promising. As technology continues to advance at an unprecedented rate, so too does the potential for using drones in geophysical surveys. Aerial drones, also known as Unmanned Aircraft Systems (UASs), unmanned aerial vehicles (UAVs), or Remotely Piloted Aircraft (RPA), are aircraft without a pilot on board; they are remotely controlled by a pilot located on the ground or on board another aircraft or by an autonomous piloting system [9]. These aerial drones offer more efficient, accurate, and cost-effective surveying than traditional methods [2]. Due to their ability to carry out tasks that were previously difficult or impossible for humans, drones have seen a surge in popularity in recent years [10]. Both the scientific and industrial sectors have attracted a wave of new researchers and substantial investments in this expansive field [11].
It is quite challenging to define a summary table regarding aerial drone classification because each modern aerial drone is full of technology, and it is complicated to compare different systems [12]. Aerial drones are classified by their shape, weight, operating range, speed, and other factors. In this study, the categorisation of aerial drones is conducted based on aerodynamic characteristics into the categories [13] indicated in Table 1, which showcases the different platform types as well as the mining phase in which they can be utilised.

Table 1.
Overview of main categories and types of aerial drones used in mining applications.
3.1. Fixed-Wing Drones
The fixed-wing classification is applied to classical aerial drones that have a fixed, non-rotating wing and use it to generate lift [10]. Fixed-wing aerial drones possess a predefined airfoil with static and fixed wings that enable lift based on the aerial drone’s forward airspeed. The control of such aerial drones is accomplished through elevators, ailerons, and rudders attached to the wings. In particular, these construction characteristics enable aerial drones to manoeuvre around roll, pitch, and yaw angles, respectively [21].
This type of aerial drone is ideal for large-scale surveying and mapping, as it can cover vast areas efficiently, achieve higher altitudes, carry larger payloads, and remain airborne for extended periods [22]. These attributes make fixed-wing drones well suited for geophysical applications in mining, where long endurance and wide coverage are essential for detecting subsurface geological anomalies. Their efficient aerodynamics allow for stable flight paths, which is advantageous in acquiring high-quality geophysical data with minimal power consumption.
However, they rely on aerodynamic forces and often lack vertical take-off and landing capabilities. Nevertheless, some models can be directly launched in flight by hand or with the help of small catapults [9]. Additionally, fixed-wing aerial drones cannot hover, as they require continuous forward motion to generate lift. These characteristics make fixed-wing aerial drones typically more challenging to operate and control than rotary-wing drones. Despite this drawback, their advantages—such as longer flight times, faster speeds, and more efficient power use—outweigh the limitations [10].
3.2. Multirotors
Multirotor aerial drones consist of two or more rotors and propellers capable of generating the required power to lift the drone. Thus, rotary-wing aerial drones can be controlled utilising the rotors’ thrust and torque. Additionally, the diagonal rotor speed is the component that specifies the yaw movement [13]. The number of rotors differs among the categories of rotary-wing aerial drones, and they can be classified into the following common categories: (a) tricopters, (b) quadcopters, (c) hexacopters, and (d) octocopters [21].
Among multirotor drones, quadrotors are the most prevalent, and thousands of them have been built over the past few decades because of their ease of construction and control [22]. These drones can fly at high speeds (not higher than common fixed-wing or hybrid drones) or low speeds, perform vertical take-off and landing, and hover in flight. Multirotor aerial drones can be used for indoor or outdoor missions [23]. Their ability to hover, take-off, and land vertically makes them ideal for surveying complex terrains and confined or inaccessible locations where fixed-wing aerial drones may struggle to operate.
In geophysical applications, these attributes make multirotors an excellent choice for localised, high-precision data collection. Their capability for low-altitude, slow-speed flights enables the acquisition of high-resolution geophysical data, particularly in mining applications, where methods such as magnetometry, electromagnetics, ground-penetrating radar (GPR), and gamma-ray spectrometry require stable flight and proximity to the surface to achieve accurate measurements. These characteristics make them particularly useful for detecting near-surface anomalies, mapping underground structures, and performing environmental monitoring in active or abandoned mining sites.
However, it is difficult for an aerial drone with rotary wings to fly for long durations because it has low fuel efficiency and must use power continuously [24]. Thus, a rotary-wing aerial drone is suitable for cases with a small area for take-off and landing, requiring the collection of detailed and precise data [25].
In conclusion, the ability of multirotor drones to hover in a stable position and their high manoeuvrability make them widely used in a variety of industries as a safe and effective means of aerial data collection. They are likely to become even more widespread and adaptable as technology advances, presenting new opportunities and solutions to numerous applications like geophysical prospection [10].
3.3. Unmanned Helicopters
Single-rotor aerial drones are durable and long-lasting, resembling helicopters in both construction and design. These aerial drones feature a large, single rotor, functioning like a rotating wing, along with a tail rotor for directional control and stability. Compared to multirotors, single-rotor helicopters are more efficient, particularly when powered by gas. Their long, wing-like blades generate greater lift and efficiency than conventional multirotor propellers, making them suitable for carrying advanced geophysical sensors over extended periods.
In mining applications, their ability to carry larger and more sensitive geophysical payloads allows for the deployment of geophysical sensors for detailed subsurface investigations and mineral exploration. Their capacity for low-altitude, steady flight paths enhances data precision, making them valuable for mapping variations in subsurface composition and identifying geological anomalies.
However, single-rotor drones are expensive and complex. Unlike multirotors, which have multiple redundant rotors to compensate for failure, a failure in the main rotor of a single-rotor aerial drone is more critical, posing greater operational risks. Additionally, they tend to vibrate, making them less stable and more prone to damage from poor landings. Due to their technical complexity, they also require frequent maintenance [22].
3.4. Hybrid Aerial Drones
Hybrid aerial drones combine the capabilities of vertical take-off and landing (VTOL) and horizontal take-off and landing (HTOL). This category of drones offers the advantages of both VTOL and fixed-wing designs, providing enhanced efficiency and performance. Over the past few decades, hybrid aerial drones have garnered significant interest from researchers and companies. This dual capability enables them to perform vertical take-offs and precise low-altitude operations as well as high-speed, long-endurance cruising to cover extensive survey areas.
In mining applications, hybrid drones can be particularly beneficial for conducting comprehensive geophysical surveys. Their ability to transition between VTOL and cruise modes makes them adaptable for surveying in challenging terrains—where fixed-wing aerial drones may require long runways and multirotors might suffer from limited endurance. Consequently, they are well suited for geophysical applications that require both detailed, high-resolution data collection and efficient large-area coverage.
However, the development of hybrid aerial drones is still in its early stages, with room for improvement in design philosophy, dynamics modelling, control, guidance, navigation, and robustness. Hybrid drones exhibit much more complex flight dynamics compared to fixed-wing and multirotor drones, particularly during the transition phase [23].
3.5. Airships
Airship drones are aircraft lighter than air, similar to conventional airships. In these aerial vehicles, light gases such as hot air or hydrogen are used in large (voluminous) chambers to reduce the overall density of the system [23]. The features of lighter-than-air aerial drones include low power consumption, high endurance, and relatively simple dynamics and control. In mining applications, their ability to operate at high altitudes allows for continuous data acquisition, which is beneficial for regional mapping and long-term environmental monitoring.
The challenges of using these aerial vehicles include their large dimensions, risks associated with hydrogen use, and problems with material selection and balloon design [9,23]. Additionally, they lack full control compared to other types of aerial drones, as their movement is highly dependent on weather conditions, especially wind, which can make navigation and station-keeping difficult.
4. Overview of Key Geophysical Methods Enhanced by Aerial Drones
4.1. Aerial Magnetometry
Aeromagnetic surveying is a geophysical method for measuring the intensity or gradient of a magnetic field using airborne instruments [26]. Recent advances in geophysical sensors, coupled with the development of aerial drones, have enabled the integration of miniaturised and lightweight magnetometers with aerial drone platforms [27]. Aeromagnetic surveys play a crucial role in regional geologic mapping and the early stages of the exploration and assessment of natural resources [28].
Aerial-drone-based aeromagnetic surveys are well suited for local surveys spanning several square kilometres. Their relatively low cost, portability, ease of setup, and rapid deployment by small field crews, along with low flight altitudes, make aerial drone aeromagnetic surveys an attractive alternative to manned surveys, particularly for small survey areas. Furthermore, the ability to collect accurate, dense data through space-filling flight patterns makes aerial drone surveys preferable to traditional ground surveys, especially in regions with challenging terrain or hazardous conditions [29]. Such challenging conditions include dense vegetation, cultivated areas, swamps, glaciers, lakes, foreshore areas, or steep mountain slopes. In these scenarios, conventional ground surveys may not be feasible, and high-altitude airborne surveys may lack the spatial resolution required [27]. Figure 2 showcases a representative aerial drone magnetometry system for data acquisition.
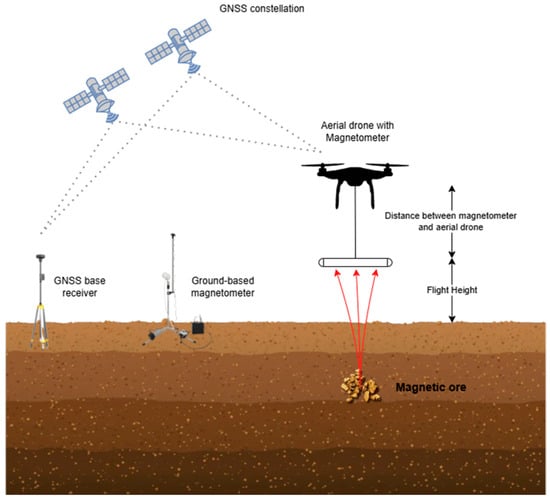
Figure 2.
A conventional aerial drone magnetometry setup for geophysical surveys.
The primary purpose of an aeromagnetic survey is to study underground geological formations and identify potential mineral resources. Geomagnetic field data are collected using aircraft-mounted magnetometers and supporting equipment, which are configured for measurements at predetermined altitudes. The collected data are subsequently analysed to map the geomagnetic field and infer the subsurface rock structure and mineral locations [26].
While several authors have demonstrated the efficacy of aerial-drone-based aeromagnetic data collection, the issue of magnetic interference generated by the aerial drone remains a significant obstacle to the broader application of aerial drone magnetic survey systems. Numerous investigators have highlighted that magnetic noise from the aerial drone, which interferes with the magnetic sensor, poses a major challenge for accurate magnetic data collection [29].
Although non-magnetic materials are used as extensively as possible in aerial drone design, certain modules and structures still incorporate ferromagnetic materials (e.g., engines, motors). The magnetic fields produced by these ferromagnetic components, along with the electromagnetic fields generated by the airborne electronic systems during operation, constitute the primary sources of interference. Notably, this issue is also present in traditional aeromagnetic surveys. As a result, most research on aeromagnetic compensation has focused on mitigating the magnetic interference caused by aircraft manoeuvres and onboard electronic equipment [30].
The issue of magnetic interference generated by aerial drones has been addressed using two kinds of approaches: (i) keeping the sensors far enough from the aerial drone, i.e., towing the magnetometer below the aerial drone by a rope, attaching the magnetometer to the aerial drone frame by a bar, or using a mag-bird suspended beneath the aerial drone, and (ii) compensating for interference related to platform attitude in real time or post-processing, which was inspired by traditional aeromagnetic surveys. These two approaches can be regarded as passive and active interference-suppression methods, respectively [31].
Increasing the distance between the magnetometer and the aerial drone is a simple method to mitigate the effects of magnetic interference, and it has been employed in several studies. Research has tested various magnetometer–aerial drone distances, concluding that the optimal attenuation of electromagnetic noise is achieved when the magnetometer sensor is positioned 3–5 m away from the drone motors. However, this distance may vary depending on the type of drone and its payload. A widely adopted solution involves suspending the magnetometer sensor from the drone using ropes, up to a distance of 3 m [32].
While this method has been used in numerous studies, it presents several challenges, such as (i) the necessity to use an accurate digital terrain model (DTM), especially in mining areas where the orography is considerable; (ii) coping with directional and positional errors caused by erratic movements; (iii) an increased risk of damage to the magnetometer due to potential collisions with obstacles, sudden altitude changes, or strong external electromagnetic interference; and (iv) flight instability. Additionally, this approach is not suitable for fixed-wing aerial drones due to their higher flight speeds and altitudes.
In the second approach, minimising interference in traditional aeromagnetic surveys has been addressed through two main strategies: (i) hardware compensation and (ii) software compensation. The hardware compensation method involves first calculating the magnetic interference of the detection platform and then adding multiple coils to the detection platform to counteract the magnetic interference generated by the aircraft. However, by the late 20th century, this high-cost and low-precision hardware-based approach was gradually replaced by software compensation methods [33].
The classic compensation scheme is based on the fundamental equations and processes first established by Tolles and Lawson in 1950 [34]. This method categorises the interference generated by the platform into three types: (i) the constant field produced by the residual magnetisation of ferromagnetic material in the flight platform, (ii) the induced field resulting from the magnetisation of ferromagnetic material by the geomagnetic field, and (iii) the eddy current field caused by the motion of conductive materials within the geomagnetic field [31]. This approach forms the foundation of modern aeromagnetic compensation methods [33].
Aerial-drone-borne magnetometry systems have been implemented across various platforms, including multirotors [15,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63], fixed wings [35,64,65,66,67,68], unmanned helicopters [67,69,70], hybrids [19], and unmanned airships [20]. In Table 2, all the identified mining applications using aerial magnetometry with drones are summarised. The table highlights the platform type, the aerial drone used, the magnetic sensor(s) employed, and the aim or application of each study.
Table 2.
Review of aerial-drone-borne magnetometry applications in the mining sector.
A variety of aerial drone platforms were utilised for aerial magnetometry, encompassing fixed-wing, multirotor, hybrid, and unmanned helicopter and airship configurations. Among the platforms, multirotors were the most prevalent due to their manoeuvrability and ability to hover in place. Models like the DJI M600 and DJI S1000 were frequently used. Regarding magnetometers, caesium-vapor and fluxgate magnetometers were the most commonly employed types, with Geometrics G-823A and GSMP-35U potassium-vapor magnetometers standing out for their sensitivity and precision. Applications primarily focused on mineral exploration, including detecting concealed magnetite ore bodies and mapping iron ore deposits. Recent innovations include hybrid systems like the iHFUAM, integrating caesium and fluxgate magnetometers to enhance detection capabilities for complex mineral deposits such as porphyry copper–gold. Detailed technical specifications for each magnetometer used are provided in Table 3.
Table 3.
The magnetometers used and their technical specifications.
Data Processing of Aeromagnetic Data Surveys
The processing of aeromagnetic survey data follows a systematic sequence of steps to transform raw magnetic measurements into a calibrated dataset optimised for geological interpretation and anomaly detection. The procedure consists of two main phases, pre-processing and processing [71], as showcased in Figure 3.
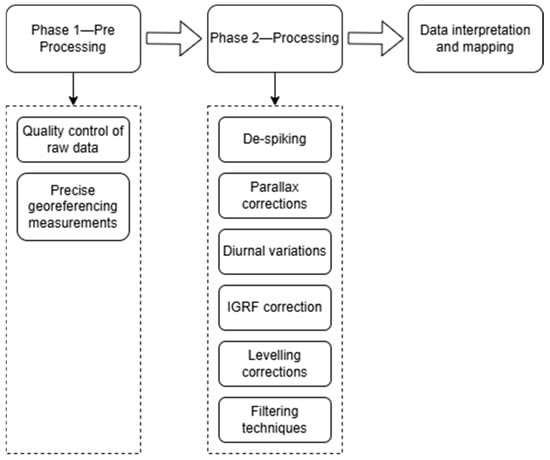
Figure 3.
Aeromagnetic data processing workflow.
Pre-processing involves the quality control of raw data, correction of inconsistencies, and precise georeferencing of measurements. The processing phase begins with de-spiking to remove short-wavelength noise, followed by parallax corrections to align navigation and magnetic readings. Diurnal variations are then removed using synchronised base station data. To isolate local anomalies, the Earth’s regional magnetic field (IGRF—International Geomagnetic Reference Field) is subtracted. Next, levelling procedures correct discrepancies at survey line intersections, ensuring internal consistency across the dataset, while micro-levelling further removes residual errors that become visible in enhanced images. Filtering techniques, such as Reduction to the Pole (RTP) and residual field calculations, further refine magnetic anomalies by suppressing unwanted signals. The processed data are then interpolated onto a grid using advanced smoothing techniques to create a continuous and visually coherent representation of magnetic anomalies.
Finally, 3D inversion techniques reconstruct subsurface magnetic source distributions, often incorporating adaptive down-sampling to balance computational efficiency and resolution preservation. These processing steps are crucial in aerial-drone-based aeromagnetic surveys, where precise calibration and correction techniques account for variations in flight altitude and navigation accuracy.
A practical application of this methodology is demonstrated in the aerial-drone-based aeromagnetic survey conducted by Porras et al. (2021) [44] in the Estancias Mountain Range, Spain. Their study employed a GEM GSMP-35U potassium-vapor magnetometer, mounted on a DJI Matrice 600 Pro aerial drone, to detect Cu–Co–Ni mineralisation. The survey incorporated fundamental aeromagnetic data processing techniques, including diurnal corrections using a base station and filtering erroneous values caused by aerial drone dynamics (e.g., take-off, landing, excessive roll, and pitch variations). The minimum curvature gridding method was used to interpolate data into a 12.5 m resolution grid, balancing data density and smoothness. Standard aeromagnetic techniques were applied, including Total Magnetic Field (TMF) computation and Reduction to the Pole (RTP), filtering to align anomalies with their sources. Additionally, the Analytical Signal (AS) method was used to enhance magnetic source edges, while 3D inversion modelling with VOXI Earth Modeling in OASIS Montaj provided estimates of the depth, shape, and magnetic susceptibility of subsurface mineralised bodies.
Another demonstration of this workflow is found in the aerial-drone-based aeromagnetic survey over the Otanmäki Fe-Ti-V deposit in Finland, conducted by Jackisch et al. (2019) [35]. The study utilised both fixed-wing and multicopter aerial drones, each carrying three-axis fluxgate magnetometers, to map magnetic field variations at multiple flight altitudes (15 m, 40 m, and 65 m AGL). A stationary magnetometer base station was deployed for the diurnal correction of temporal variations in the Earth’s magnetic field. The pre-processing phase applied rigorous noise reduction techniques, including filtering erroneous measurements caused by aerial drone manoeuvres and implementing heading corrections based on calibration flights. The IGRF model was subtracted to isolate local magnetic anomalies, and the data were interpolated into a gridded total magnetic intensity (TMI) map using the minimum curvature method. The processing phase introduced advanced flight altitude correction and data-levelling techniques. For the fixed-wing aerial drone, Equivalent Layer Modelling (ELM) inversion was applied using RadaiPros software to standardise the magnetic field at a uniform elevation, mitigating inconsistencies due to flight altitude variations. The multicopter aerial drone data followed standard airborne magnetometry protocols, employing survey line levelling and interpolation in Quantum GIS (QGIS). To enhance structural interpretation, derivative filters such as the first vertical derivative (1VD) and the Analytical Signal (AS) method were used, improving the delineation of mineralised structures.
A further example of this methodology is found in the aerial-drone-based aeromagnetic survey of the Ploumanac’h pseudo-skarn deposit in French Brittany, conducted by Martelet et al. (2021) [51]. This study utilised a rubidium absolute QuSpin magnetometer, suspended 4.5 m below a survey-grade multirotor aerial drone, to collect high-resolution magnetic data at flight altitudes ranging from 15 to 30 m above the mean sea level. A GSM-19 base station recorded diurnal variations, enabling precise corrections, while additional noise reduction techniques were applied to eliminate errors from flight manoeuvres. Following initial corrections, the minimum curvature method was used to interpolate data into a gridded format, improving the spatial resolution. The Reduction-to-the-Pole (RTP) filter was applied to align anomalies with their sources, while derivative techniques such as the Analytical Signal (AS) method further enhanced geological structure visualisation. For 3D modelling, forward magnetic modelling was performed along multiple cross-sections to estimate the depth and geometry of mineralised structures. The model incorporated regional airborne magnetic data, aerial-drone-borne high-resolution measurements, and field observations, ensuring consistency between surface structures and subsurface anomalies. The final 3D geological model, developed using 3D-Geomodeller software, successfully delineated the pseudo-skarn mineralisation and its structural controls.
These studies illustrate how aerial-drone-based magnetometry, when combined with high-resolution processing techniques, provides a cost-effective and flexible alternative to traditional airborne and ground-based surveys, particularly in challenging terrains and remote mining environments.
4.2. Airborne Ground-Penetrating Radar (GPR)
Airborne-based GPR is a cutting-edge technology that utilises electromagnetic waves to penetrate the subsurface and capture detailed geological information [72]. GPR is valued as a non-invasive, fast, and accurate geophysical method for detecting subsurface anomalies, making it widely applied in the mining industry for various purposes. Its broad application in mining arises from the need to interpret subtle textural variations in radar data, a task that often requires experienced users due to the complexity of geological environments. GPR investigations provide essential data for mine designers, aiding in the understanding of discontinuity systems, subsurface fractures, and groundwater conditions critical for selecting optimal exploitation methods [73]. Additionally, GPR excels in detecting fractures of various scales, from millimetric to decametric, and its ability to geometrically reconstruct subsurface features has established it as a valuable tool for characterising mining sites and rock masses. This capability significantly enhances quarrying and extraction processes, contributing to improved mining efficiency and safety [74].
Despite the significant potential of GPR in geophysical surveys, its application via aerial drones in mining contexts has been limited. A review of the literature identified only one relevant study, which utilised a DJI M600 equipped with the COBRA Plug-in SE-150 sensor. This application focused on characterising quarry excavation areas using a GPR sensor with a dynamic range of 192 dB and a maximum penetration depth of 120 m. The limited adoption of aerial-drone-borne GPR may be attributed to challenges such as integrating GPR systems with aerial drone platforms due to constraints in size, weight, and power. Additionally, the complexity of interpreting radar data in highly variable subsurface conditions may further contribute to the hesitancy in broader applications. This underscores the need for further innovation in lightweight, aerial-drone-compatible GPR systems. Figure 4 illustrates a representative aerial-drone-borne GPR system, highlighting the integration of a ground-penetrating radar antenna mounted beneath a drone for the characterisation of subsurface anomalies, such as those found in quarry sites.
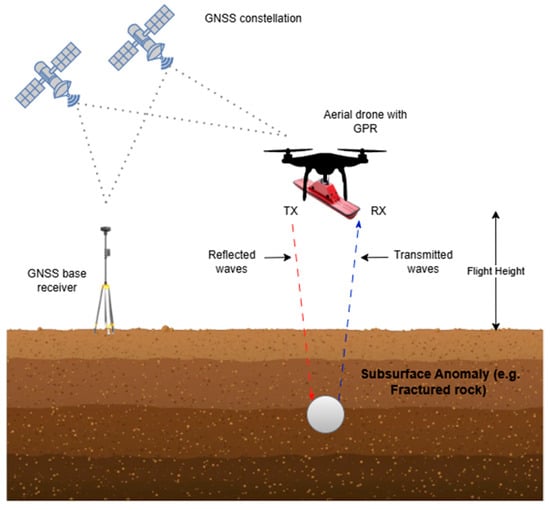
Figure 4.
A conventional aerial-drone-borne GPR setup for geophysical surveys.
Detailed specifications of the application and the GPR system used are provided in Table 4 and Table 5.
Table 4.
Review of aerial-drone-borne GPR applications in the mining sector.
Table 5.
The GPR used and its technical specifications.
Data Processing of Aerial GPR Surveys
The processing techniques for ground-penetrating radar (GPR) measurements acquired using an aerial-drone-mounted GPR are based on those developed for air-launched systems [75]. However, additional steps are required to address the unique challenges of aerial-drone-based measurements. The GPR processing described in this section can be adapted to different system architectures and applications, incorporating complementary techniques to enhance detection capabilities.
The overall processing workflow is summarised in Figure 5.
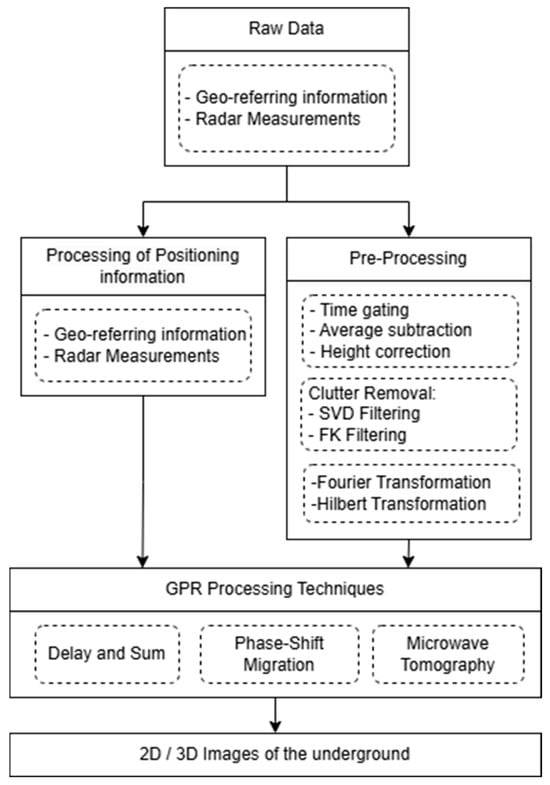
Figure 5.
GPR data processing workflow.
Saponaro et al. (2021) [16] conducted an aerial-drone-based GPR survey to characterise a quarry excavation site in Falconara Albanese, Southern Italy. The acquired radar data were processed using PRISM processing software (RadarTeam, v2.59), following a structured workflow to enhance signal clarity and facilitate geological interpretation. The processing workflow began with background removal to eliminate direct transmitter signals and reduce unwanted artefacts. A band-pass filter (3–309 MHz) was applied to isolate relevant frequency components within the instrument’s operational bandwidth. To further refine the data, FK-filtering was used to suppress lateral reflections, while a five-trace moving average filter was used to improve the horizontal continuity in the radar profiles.
Further enhancements included time-varying gain, which compensated for signal attenuation caused by absorption and scattering. Topographic corrections aligned radar data with surface relief for accurate depth representation. Time-to-depth conversion was performed using a dielectric constant of 5, corresponding to a wave velocity of 0.135 m/ns, based on dry granite properties. Additionally, the Hilbert transform was applied to extract instantaneous amplitude, highlighting energy variations that helped identify subsurface features such as fractures and discontinuities.
For data interpretation, the radargrams were analysed to detect key geological features, including homogeneous granite formations. High-energy reflections identified in the energy content analysis were correlated with fractures and water-filled structures, providing valuable insights into the subsurface characteristics of the quarry. This analysis contributed to assessing the site’s suitability for resource extraction and demonstrated that drone-based GPR is an effective, non-invasive tool for high-resolution quarry exploration.
4.3. Airborne Electromagnetic (AEM) Surveys
The exploration of mineral resources has progressively expanded into complex terrains and uninhabited areas. This shift has heightened the demand for studying geological environments at depths of at least 100–150 m, a requirement that is increasingly critical in the geological prospecting market. To address these challenges, more flexible exploration methods, such as AEM, have emerged as valuable tools [76].
AEM systems, widely used in mineral exploration, rely on varying principles and technical designs, resulting in different levels of performance depending on the geoelectrical and geological conditions [77]. An overview of a general AEM aerial drone system is illustrated in Figure 6, providing a visual representation of the system.
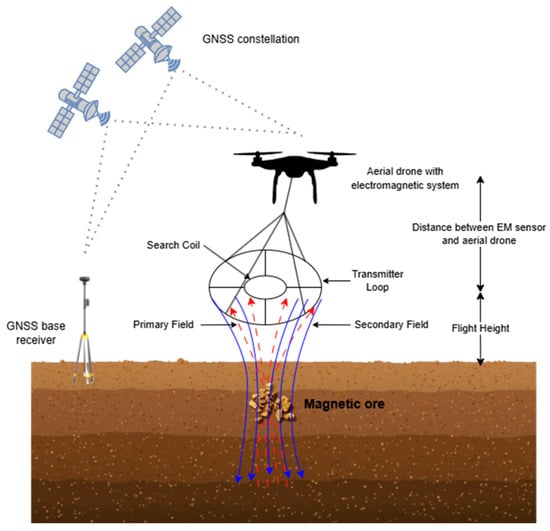
Figure 6.
A conventional aerial-drone-borne electromagnetics setup for geophysical surveys.
Two commonly employed techniques for collecting AEM data are (i) frequency-domain electromagnetics (FEM) and (ii) time-domain electromagnetics (TEM). Both methods utilise a transmitter coil to generate a time-varying electromagnetic field, which induces eddy currents in the ground.
In the FEM method, instruments that measure induction signals in the frequency domain typically transmit one or a set of sinusoidal, repetitive signals and receive a superposition of transmitted and induced ground signals in one or a set of receiver coils. In FEM methods, high-frequency EM signals attenuate rapidly in a conducting medium, giving less penetration depth. Lower frequencies contain information from deeper parts of the subsurface as they are less attenuated, and higher frequencies contain information from shallower parts of the Earth. Conversely, TEM systems typically transmit a strong single pulse, inducing a signal that is picked up while the transmitter is off. Pulses may be ramped up and switched off rapidly or at half-sines. In time-domain systems, the induced current diffuses into the ground, moving downward and outward over time after the transmitter current is switched off. Early measured time gates represent shallow depths, while later time gates respond to deeper targets [78].
In AEM, all of the components of the observation system are mounted on the drone. However, the detection depth of current AEM systems is constrained by the power supply and the carrying capacity of the aerial drone, limiting their effectiveness in deeper or more challenging geological settings [79].
To overcome these limitations, the semi-airborne electromagnetic method (SAEM) has gradually been applied to the detection of complex terrain areas across various fields. The SAEM combines ground-based large-magnetic-moment transmitters with aerial receivers mounted on aerial drones, achieving a balance between detection depth and operational efficiency [80]. Compared to traditional AEM methods, the SAEM transmitting system is placed on the ground, which means the power and weight of the system are no longer constrained by the power supply and carrying capacity of the flight platform. As a result, higher power output can be achieved, enabling greater detection depths than those achievable with AEM methods. Additionally, the flight risks are significantly reduced [79].
Table 6 details all the identified applications of electromagnetic surveys in mining.
Table 6.
Review of aerial-drone-borne EM applications in the mining sector.
The aerial-drone-based EM surveys in the reviewed literature primarily employed multirotor platforms, although a hybrid aerial drone has also been used. The main focus of these surveys has been uranium exploration, but hybrid systems like “Louhi” have broadened their scope to include other minerals, such as copper and gold. These advancements underscore the growing role of aerial drones in enhancing the efficiency and accuracy of EM surveys.
Data Processing of EM Surveys
Airborne electromagnetic (AEM) methods require rigorous data processing routines to transform raw measurements into reliable geophysical models of the subsurface. The accuracy of the inversion results is highly dependent on the quality of the recorded data; therefore, both the performance of the acquisition hardware and the robustness of the processing software are critical. As highlighted by Siemon et al. (2009) [85], “the goal of the data processing is to derive those field values from the data measured that correspond to the subsurface material parameters and to eliminate—or at least minimise—those portions in the data that are affected by influences not belonging to the subsurface”. Figure 7 presents the general data processing workflows for both the frequency-domain electromagnetic (FEM) and time-domain electromagnetic (TEM) methods.
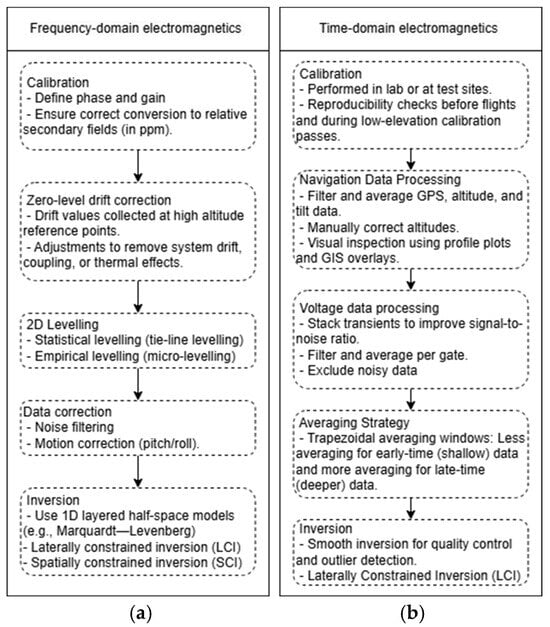
Figure 7.
Data processing workflows for airborne electromagnetic methods: (a) FEM and (b) TEM.
Davidenko et al. (2023) [83] presented a robust data processing procedure for aerial drone TEM systems, focusing on extracting transient EM signals immediately after the current pulse shutdown. Their workflow involved industrial noise suppression, the removal of long-term signal trends, and 2D sliding window smoothing to enhance data consistency. TEM readings were interpolated on a logarithmic time scale, and spatial coordinates (x, y, z) were precisely merged using specialised software for accurate georeferencing. A key feature of their approach was the S-tau transformation method, which enabled the computation of apparent longitudinal conductance as a function of depth. This method significantly enhanced the efficiency of geophysical data interpretation, facilitating the development of detailed geoelectrical models for subsurface exploration over Lake Baikal, Russia.
Similarly, Parshin et al. (2021) [81] implemented a comprehensive processing workflow for aerial-drone-acquired TEM data, integrating advanced noise reduction and signal enhancement techniques. Their approach began with the segmentation of transient records (TRs) from flight mission data using GPS timestamps, ensuring precise temporal and spatial alignment. Industrial noise, particularly from 50 Hz power grids, was filtered using a digital differentiating filter, while trend-suppression techniques minimised distortions caused by sensor movement in the Earth’s magnetic field. To further reduce noise, a 2D sliding window smoothing method utilising Hampel M-estimates was applied. The processed data were then integrated into time bins, enhancing the signal-to-noise ratio while optimising data storage efficiency. Once each sounding curve was georeferenced to its geographic coordinates, advanced data inversion techniques were employed to generate 3D resistivity models and geophysical sections, allowing for detailed subsurface resistivity characterisation.
Expanding on these methodologies, Hallbauer-Zadorozhnaya et al. (2022) [82] applied a modified S-tau transformation to convert EMF signals into apparent longitudinal conductance curves as a function of depth or time. This transformation facilitated the identification of low-resistivity anomalies, which correspond to conductive layers or subsurface bodies, such as mineralised zones or groundwater-bearing formations. The study processed high-density aerial drone TEM data from closely spaced flight profiles to generate three-dimensional subsurface conductivity models, providing a detailed visualisation of geoelectric structures at varying depths. Their approach was successfully applied to experimental surveys over Lake Baikal and a uranium occurrence, demonstrating the effectiveness of aerial drone TEM in detecting and delineating geophysical anomalies.
4.4. Gamma-Ray Spectrometry (GRS)
Gamma-ray prospecting is a radiometric survey method that measures the natural radioactive background of rocks, ores, or radioactive contamination. Mineral radioactivity is characterised by its activity, which refers to the number of decays per unit of time. The higher the mass fraction of radioactive elements, the greater the activity per unit mass. As a result, the total gamma radiation intensity, which is proportional to activity, can be used to detect the presence of radioactive elements and estimate their concentration in rocks. By analysing the radiation spectral characteristics (energy spectrum), it is possible to determine the individual content of each radionuclide. In geological applications, it is used to prospect for deposits of radioactive ores, precious and base metals associated with radioactive elements, and hydrocarbons and, most importantly, for geological mapping [86]. Figure 8 illustrates a conventional geophysical application of gamma-ray prospecting, specifically in the context of mapping uranium-rich geological formations.
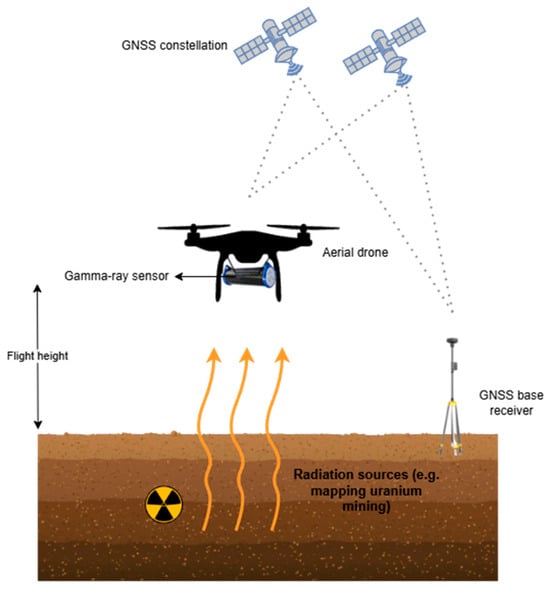
Figure 8.
Schematic illustration of airborne gamma-ray spectrometry (GRS) for geological mapping.
As shown in Table 7, the papers found on aerial drone gamma-ray surveys in mining applications primarily focus on uranium exploration, highlighting the growing global interest in assessing past uranium mining and processing activities as part of the nuclear fuel cycle, as well as in controlling and mitigating their impacts. Sustainable uranium production, including the environmentally safe remediation of mine sites and associated waste facilities, is a crucial prerequisite for obtaining the social license to operate ongoing and future front-end activities of the nuclear fuel cycle [87].
Table 7.
Review of aerial-drone-borne GRS applications in the mining sector.
As indicated by the research articles identified through the search for mining applications, aerial drone platforms, such as multirotor drones like the DJI M600, fixed-wing platforms like the WingtraOne, and unmanned helicopters like the Z100, have been employed for gamma-ray surveys. The most commonly used spectrometers include the Medusa MS-700 and MS-350, both from the same company, featuring scintillation detectors such as CeBr3 and NaI. Applications have ranged from uranium exploration to the environmental monitoring of mine tailings. As can be seen from Table 8, the SibGIS custom system stood out for its high spectral resolution, enabling precise radionuclide analysis. The versatility and the potential of drone-based methods in mining exploration are growing worldwide, making them essential tools for radiological surveys in mining contexts. With the development of miniaturised detectors, various sensor systems can now be deployed on drones to investigate a wide range of geoscientific and geotechnical issues.
Table 8.
The gamma-ray spectrometers used and their technical specifications.
Data Processing of Gamma-Ray Spectrometry Surveys
The International Atomic Energy Agency (IAEA) plays a crucial role in promoting the safe and effective use of nuclear technologies, including their applications in mining exploration and mapping. Recognising the need for standardised methodologies in gamma-ray spectrometry, the IAEA has developed comprehensive guidelines for radioelement mapping [98]. Advancements in instrumentation, data processing, and calibration techniques have significantly improved the reliability and applicability of gamma-ray spectrometry in mining. This document provides a framework for noise reduction, spectral corrections, and background adjustments, ensuring that the derived concentrations of potassium (K), uranium (U), and thorium (Th) are precise and comparable across different surveys. By defining standardised procedures for energy calibration, stripping corrections, and height adjustments, the IAEA enhances the reliability of radiometric datasets, ensuring their applicability in mining exploration. These guidelines are instrumental in maintaining gamma-ray spectrometry as a trusted tool for mining applications.
The IAEA guidelines outline a structured sequence of data processing procedures to ensure accuracy and consistency in airborne gamma-ray spectrometry, specifying calibration requirements for each step. The pre-processing phase involves merging datasets, performing quality control, and filtering radar altimeter and cosmic-ray data to smooth variations and reduce noise. Spectral smoothing techniques such as Noise-Adjusted Singular Value Decomposition (NASVD) and Maximum Noise Fraction (MNF) enhance signal clarity by extracting dominant spectral features while removing uncorrelated noise. Live time (dead time) correction compensates for pulse pile-up effects in high-count-rate environments, ensuring accurate detector response. Energy calibration is conducted using reference radioelement standards to maintain spectral accuracy. Aircraft and cosmic background corrections remove signals unrelated to geological sources, using high-altitude calibration flights to estimate cosmic radiation contributions. Additionally, radon background correction accounts for atmospheric radon interference through calibration flights or additional detectors. Stripping corrections isolate K, U, and Th signals by applying stripping ratios derived from ground calibration experiments. Height correction normalises measurements for altitude variations using predefined attenuation coefficients. Finally, data levelling ensures consistency across survey lines by adjusting for environmental and instrumental variations. These processing steps are critical for converting raw airborne or aerial-drone-based gamma-ray data into accurate elemental concentration maps, supporting geological exploration, environmental monitoring, and mineral prospecting. The complete sequence of these processing steps is illustrated in the workflow diagram in Figure 9, which outlines the standardised procedures recommended by the IAEA for airborne gamma-ray spectrometry data processing.
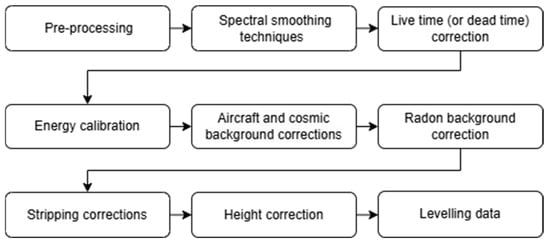
Figure 9.
Schematic overview of the data processing workflow, based on IAEA guidelines.
Building on these guidelines, aerial-drone-based gamma-ray spectrometry has been increasingly employed for high-resolution radiometric mapping. The following case studies provide examples of how advanced aerial-drone-mounted spectrometers apply these principles in mining exploration and environmental monitoring.
Parshin et al. (2021) [86] implemented a systematic data processing workflow for aerial-drone-based gamma-ray spectrometry to ensure accurate radiometric measurements in mining exploration. The study utilised a CsI (Tl) scintillation-based gamma-ray spectrometer, where pre-flight calibration was conducted to ensure proper energy alignment for key radionuclides: 40K, 238U, and 232Th. Following data acquisition, the recorded gamma-ray spectra were georeferenced by integrating GPS and altimeter data, ensuring the accurate georeferencing of radiometric measurements. To compensate for altitude-dependent attenuation, a height correction factor was applied based on empirical correction models derived from Monte Carlo simulations. Conventional window stripping ratios were applied to isolate potassium, uranium, and thorium emissions, reducing spectral overlap and improving element-specific resolution. To refine spatial accuracy, local polynomial interpolation (LPI) was applied, smoothing spatial variations and enhancing the resolution of radiometric maps. Finally, the radiometric datasets were validated against ground-based spectrometry measurements, ensuring high consistency and reliability in mapping natural radioactivity across the mining area.
Altfelder et al. (2024) [92] implemented a structured methodology for aerial-drone-based gamma-ray spectrometry to ensure accurate radiometric analysis. The raw spectral data acquired by the aerial-drone-mounted gamma-ray spectrometer underwent footprint and altitude corrections to account for the attenuation of gamma radiation by the air layer between the ground and the detector. The height correction employed analytical models based on the assumption of a semi-infinite homogeneous soil volume with uniform radionuclide distribution. Spectral data were then processed using Full-Spectrum Analysis (FSA) for certain detectors and the window method for others, following established IAEA guidelines. To validate the aerial-drone-derived data, geostatistical methods such as ordinary kriging, block kriging, and non-arithmetic krige averaging were applied to interpolate and upscale backpack-measured 238U specific activities to match the aerial drone’s larger detector footprint. The aerial drone data were further corrected for height-dependent attenuation using models adapted from conventional airborne gamma-ray spectrometry. Additionally, a bias correction step was performed by comparing aerial-drone-based data with backpack survey results, revealing a 22% overestimation in the aerial drone measurements, potentially due to shielding effects in ground-based backpack surveys or systematic processing errors. The final interpolated dataset demonstrated the effectiveness of aerial-drone-based gamma-ray spectrometry for mapping uranium-contaminated mining sites, accounting for spatial averaging and detector response variations across different altitudes and scales.
4.5. Other Geophysical Methods
While the use of aerial drones in mining applications has gained significant attention in combination with methods like magnetometry, electromagnetics, ground-penetrating radar (GPR), and gamma-ray spectrometry, less exploration has been conducted on their integration with other geophysical methods, particularly seismic tomography, electrical resistivity tomography (ERT), and gravimetry.
Seismic tomography is a geophysical technique that creates cross-sectional images of the Earth’s subsurface by analysing seismic data. It measures the time seismic waves, from natural or artificial sources, take to travel through geological materials. By assessing these travel times and wave amplitudes, scientists can infer the subsurface’s structure [99]. Electrical resistivity tomography (ERT) is a non-invasive geophysical technique designed to measure the spatial distribution of electrical resistivity within the subsurface of an open field [100]. Gravity methods measure the acceleration of a gravitational field. A gravimeter is a passive, low-impact, non-invasive geophysical tool that measures and maps lateral changes in the Earth’s gravity field, which is a function of Earth material density differences [101].
Despite an extensive literature review on aerial drone applications in geophysical surveys, no studies were found that specifically demonstrate the use of seismic tomography, ERT, or gravimetry with aerial drones in mining. This presents an opportunity for future research to explore how these techniques could be adapted for aerial-drone-based platforms in mining contexts.
5. Discussion
5.1. Types of Aerial Drones and Geophysical Methods Used in Mining Applications
In Section 2, a total of 59 research papers that encompassed the mining applications of aerial drones using geophysical methods were reviewed. Several of these studies investigated more than one mining application of aerial drones using geophysical methods, resulting in sixty-six individual drone applications analysed in total. The analysis revealed that multirotor aerial drones are the most extensively studied platform, accounting for 48 out of 66 applications (72.73%), highlighting their versatility and widespread adoption in mining due to their manoeuvrability and ease of use. Fixed-wing aerial drones were the second most common, with eight applications (12.12%). Other aerial drone types, including unmanned helicopters (six applications, 9.09%), hybrid aerial drones (two applications, 3.03%), and unmanned airships (one application, 1.52%), have been explored less frequently. One application (1.52%) did not specify the aerial drone type used. The changes in different types of aerial drones used for mining surveys in the reviewed research over time are shown in Figure 10. The temporal analysis of these studies showed minimal activity between 2005 and 2012, with only one study published in 2005, which exclusively utilised fixed-wing aerial drones, whereas multirotor aerial drones were not yet widely explored. A gradual increase occurred from 2013 to 2020, during which multirotor aerial drones emerged as the dominant platform. The years 2021 and 2022 marked the peak of aerial-drone-related studies, with 10 and 12 investigations, respectively, both primarily focused on multirotor aerial drones. In recent years (2023–2025), the diversification of aerial drone types has been observed, including significant contributions from fixed-wing, unmanned helicopter, and hybrid aerial drones, reflecting the evolving demands and technological advancements in aerial drone applications for mining. This progression underscores the growing role of aerial drones in enhancing geophysical methods within mining operations.
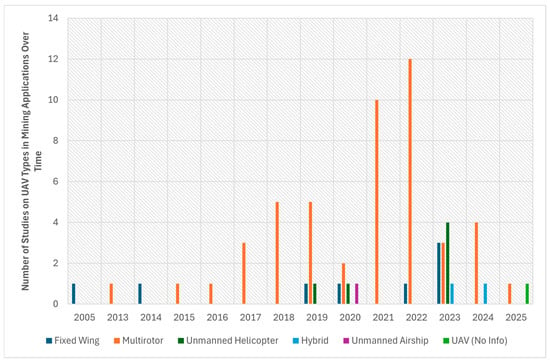
Figure 10.
Number of studies on aerial drone types in mining applications over time.
Figure 11 presents the distribution of research studies examining different aerial-drone-based geophysical methods applied in mining. It should be noted that the total number of method entries exceeds the number of reviewed papers, as several studies incorporated more than one geophysical technique and are thus counted multiple times. Aerial magnetometry is the most extensively researched method, with 39 studies, emphasising its critical role in mineral exploration by identifying subsurface magnetic anomalies. This popularity is driven by the ease of aerial drone integration with magnetometers and the effectiveness of low-altitude flights for high-resolution surveys. Gamma-ray spectrometry follows with 18 studies, primarily used for detecting uranium and other mineral deposits. Aerial drones carrying lightweight gamma-ray spectrometers have proven effective for mapping radiometric signatures, though challenges remain in data processing and altitude corrections. Electromagnetic (EM) surveys have received comparatively less attention, with only five studies. This is likely due to the high power demands of active EM systems and the weight constraints of aerial drone platforms, limiting their penetration depth. Ground-penetrating radar (GPR) has been explored in only one study, reflecting the ongoing challenges of aerial drone integration, including flight stability at low altitudes and signal interference. The limited number of studies on EM and GPR methods suggests a need for further research into optimising aerial-drone-based implementations and expanding their applicability in mining exploration.
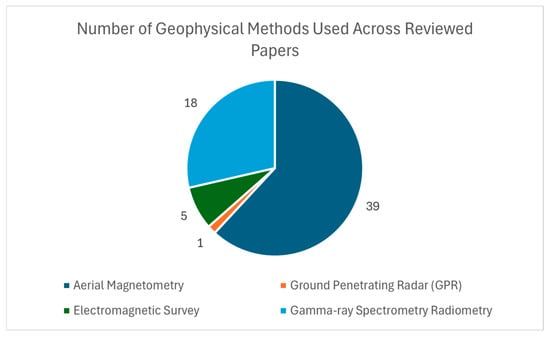
Figure 11.
Number of geophysical methods used across reviewed papers in mining scenarios.
5.2. Decision Criteria for Selecting Aerial Drones in Geophysical Surveys
Selecting the appropriate aerial drone platform for geophysical applications requires the consideration of multiple factors, including the survey scale, terrain conditions, sensor requirements, payload capacity, operational constraints, and mining phase. Fixed-wing aerial drones are preferred for large-scale regional surveys due to their long flight endurance and ability to cover extensive areas efficiently. However, in rugged or confined terrains, such as underground mining sites or narrow valleys, multirotor aerial drones provide better manoeuvrability and precise control, enabling the low-altitude flight paths and hovering capabilities necessary for detailed, high-resolution geophysical surveys.
Hybrid aerial drones offer a versatile alternative, balancing extended flight time with terrain adaptability, making them ideal for complex mining environments requiring both large-scale mapping and site-specific data acquisition. Unmanned helicopters, while offering superior payload capacity and endurance, require complex flight controls and frequent maintenance and have higher operational costs, which may limit their feasibility in certain field conditions. In addition, unmanned airships present a unique solution for long-duration surveys, particularly in large, open mining regions where sustained airborne operations are required. However, their susceptibility to strong winds and large operational footprint can pose deployment challenges in certain environments.
Beyond flight characteristics, the selection process must consider payload weight restrictions, sensor integration, data transmission capabilities, and regulatory compliance. A structured decision-making framework, factoring in cost-effectiveness, the ease of deployment, and the specific geophysical method used, ensures that the chosen aerial drone aligns with the unique demands of each survey environment.
5.3. Role of Aerial Geophysics According to the Phase of Mining Activity
As noted throughout this research, aerial geophysics is a powerful tool that enhances efficiency, safety, and environmental responsibility during the global mining lifecycle. From initial exploration to extraction and post-mining restoration, airborne geophysical surveys provide valuable insights in each individual stage.
Differentiating by the stage of mining development, aerial geophysics has been most extensively used in the exploration phase. During this stage, these surveys help to identify potential mineral deposits over large areas quickly and cost-effectively. Techniques such as magnetometry and electromagnetic or radiometric prospecting allow for the mapping of geological structures, detection of ore bodies, and prioritisation of targets for ground-based exploration and drilling. The selection of one or another prospective aerial technology strongly depends on the nature of the mineral that is intended to be found. Within this first exploration phase, aerial magnetometry is the most widely used, as it measures variations in the Earth’s magnetic field to detect geological structures such as faults, folds, and intrusions associated with mineral deposits, making it particularly useful for detecting iron, nickel, copper, or gold. This geophysical technique, which has been used since World War II, stands out for its ability to cover large areas efficiently and provide valuable geological insights for mineral exploration. AEM and GRS are also applied during this mining phase to detect mineralised zones hidden beneath cover rocks and map density variations in rocks of dense ore bodies such as gold, lead, zinc, or uranium. Indeed, airborne radiometric surveys are well suited for detecting natural gamma radiation from surface rocks, being particularly useful for uranium, rare earth elements, and potash exploration. Despite these clear contributions to mineral exploration, airborne geophysical methodologies provide indirect indications of minerals that often require follow-up drilling to characterise the evaluated mining structure in greater detail. These techniques are also less effective in areas with too much vegetation cover and thickness of the covering material.
Although the evaluated methodologies have been applied primarily in the mining exploration phase, aerial geophysics is also important during the extraction and restoration stages of the mining site. During extraction, aerial geophysical sensors are mainly used to improve the planning and drilling efficiency to reduce the mining waste but also to assist in the detection of unstable areas (without compromising the operator’s safety). In this sense, gravity and AEM surveys are the most frequent methods of refining ore body models and provide additional information about the extraction progress. However, the application of these techniques during this mining stage is not widely expanded, given the limitation for prospecting deeply buried structures and the need for having fairly precise knowledge of the structure being extracted.
Regarding the final step of the mining activity, restoration is key for controlling the possible environmental disturbances that could appear after the exploitation of a certain resource, such as land degradation, water contamination, or biodiversity loss. In this way, mining restoration (or reclamation) aims to mitigate these impacts by rehabilitating landscapes, restoring ecosystems, and ensuring sustainable post-mining land use, for which aerial geophysics provides a powerful tool in assessing, monitoring, and guiding restoration efforts. Following the extensive bibliographic review carried out in this research, it has been found that airborne magnetometry and AEM methodologies, together with GRS, are the most widely used in the prospective campaigns carried out within this mining phase. These techniques are especially applied in the monitoring of extensively restored mining sites with the principal objective of tracking the rehabilitation progress and identifying possible contamination risks that could affect the surrounding ecosystem. The role of these methodologies during mining restoration is of great importance in order to cover large areas of the deposit (often of large dimensions) in a relatively manageable time, which allows the continuous monitoring of the progress of the rehabilitation actions and guarantees greater security in the stability of the land and structures involved, contributing to the early detection of danger conditions related to the leakage or accumulation of mining waste. Despite the clear advantages that these aerial prospecting technologies provide over traditional control practices, their weakness is related to the impossibility of fully assessing underground contamination, as well as deep or small-scale structural changes, which, depending on the sensor used, may be imperceptible during the geophysical evaluation. In addition, to achieve precise control of this mining stage, periodic surveys for long-term monitoring are generally required.
5.4. Challenges and Limitations of Aerial-Drone-Based Geophysical Surveys
Despite their advantages, aerial-drone-based geophysical surveys face several challenges that impact data accuracy, operational efficiency, and practical implementation in mining applications. One of the primary challenges is data fusion, which involves integrating multiple datasets to create a comprehensive geological model. Since different sensors operate at varying spatial resolutions, depths, and units of measurement, aligning and correlating their outputs can be complex and computationally demanding. Additionally, environmental factors, such as electromagnetic interference from aerial drone motors, sensor vibrations, and fluctuating atmospheric conditions, can distort readings, necessitating careful calibration, filtering, and correction techniques before data fusion.
Beyond data integration, data processing presents another significant hurdle. Aerial drones generate large volumes of high-resolution geophysical data, which require advanced filtering, noise reduction, and interpolation techniques before meaningful analysis can be conducted. Processing magnetometry data, for example, involves correcting for diurnal variations, altitude inconsistencies, and aerial-drone-induced electromagnetic noise, while GPR and EM surveys require complex signal processing algorithms to enhance subsurface feature detection.
Even after data fusion and processing, data interpretation remains a critical challenge in aerial-drone-based geophysics. Extracting valuable geological insights, such as identifying mineral deposits, subsurface anomalies, and structural discontinuities, requires advanced modelling techniques. The depth resolution of certain geophysical methods, such as magnetometry, can be ambiguous, requiring 3D inversion modelling, machine learning-based anomaly detection, and cross-validation with ground surveys to improve accuracy and reliability. In this sense, supervised learning models, trained with known mineral deposits, can predict similar structures in new prospecting data, while unsupervised clustering techniques like K-means and Principal Component Analysis (PCA) can contribute to distinguishing between noise and potential targets [102].
From an operational perspective, aerial drone geophysical surveys also face regulatory and logistical constraints. Flight altitude restrictions, beyond-visual-line-of-sight (BVLOS) regulations, and compliance with controlled airspace requirements can limit survey coverage, particularly in restricted mining zones or environmentally sensitive areas. Additionally, battery limitations remain a significant constraint, restricting flight durations and requiring optimised flight planning, energy-efficient aerial drone designs, and multiple sorties to cover extensive survey areas effectively.
Addressing these challenges requires a combination of hardware improvements, algorithmic enhancements, and adaptive survey strategies to fully realise the potential of aerial-drone-based geophysical exploration in the mining sector.
6. Conclusions
This review provides a detailed analysis of aerial-drone-based geophysical applications in the mining industry, focusing on four key methods: magnetometry, ground-penetrating radar (GPR), electromagnetic (EM) surveys, and gamma-ray spectrometry. A total of 59 studies were reviewed, highlighting the increasing role of aerial drones in mineral exploration and subsurface characterisation. The findings indicate that multirotor aerial drones are the most widely used platforms, particularly in magnetometry and GPR applications, due to their manoeuvrability and ability to hover for precise data collection. Fixed-wing aerial drones, while less common, offer extended endurance and are primarily used for larger-scale surveys. Other aerial drone types, including hybrid VTOL systems, unmanned helicopters, and airships, were also employed, although they appeared in fewer studies compared to multirotor and fixed-wing platforms.
Each geophysical method presents unique advantages and challenges. Magnetometry remains the most extensively applied technique, with aerial drones equipped with caesium-vapor and Overhauser magnetometers for mineral exploration. However, challenges related to aerial-drone-induced magnetic interference persist, necessitating solutions such as sensor suspension to improve data accuracy. GPR surveys have been explored in quarry excavation areas, demonstrating the capability of aerial drones to map subsurface structures, but limitations in penetration depth and data complexity hinder broader adoption. Electromagnetic surveys, including time-domain and frequency-domain methods, have been successfully deployed for geological mapping and mineral exploration, with ongoing advancements in semi-airborne EM systems as alternatives to fully onboard configurations to address weight and power limitations while enhancing detection depth. Gamma-ray spectrometry has shown promise in detecting uranium contamination in mining areas, leveraging aerial drone mobility to conduct radiometric surveys efficiently.
Despite these advancements, several challenges remain, including short flight endurance, payload limitations, and the need for improved data processing techniques. However, the reviewed literature also highlights promising technological developments that are beginning to address these issues. The exploration of diverse UAV types, along with the development of new configurations such as hybrid drones that combine multirotor and fixed-wing capabilities, provides a broader range of aerial drone platforms that can be selected based on the specific requirements of each mining application. Recent progress includes lighter and more compact geophysical sensors, making them easier to integrate with various platforms. Miniaturised magnetometers, GPR antennas, and gamma-ray spectrometers are increasingly used in drone-based surveys without compromising data quality while also improving technical performance such as flight endurance. In parallel, advances in data processing workflows such as more efficient filtering, real-time correction techniques, and three-dimensional data representations are contributing to improved data quality and faster interpretation. As aerial drone technology continues to evolve, these systems are expected to become even more integral to modern mining exploration.
Future research should improve sensor integration, data fusion, and operational efficiency to maximise drones’ potential in geophysical mining surveys. In parallel, efforts should be made to explore geophysical methods that are currently underutilised or not yet applied in aerial-drone-based mining surveys in order to further expand the methodological scope of this emerging field.
Author Contributions
Conceptualisation, D.P. and D.G.-A.; methodology, D.P., P.V., K.M., C.S.B. and D.G.-A.; validation, D.P., P.V., K.M., C.S.B. and D.G.-A.; formal analysis, D.P., P.V., K.M., C.S.B. and D.G.-A.; investigation, D.P., C.S.B. and D.G.-A.; resources, P.V. and K.M.; writing—original draft preparation, D.P. and D.G.-A.; writing—review and editing, D.P., P.V., K.M., C.S.B. and D.G.-A.; project administration, P.V. and K.M.; funding acquisition, P.V. and K.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the MINE.IO and XTRACT Horizon 2020 projects, grant numbers 101091885 and 101138432, respectively.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of this study; in the collection, analyses, or interpretation of data; in the writing of this manuscript, or in the decision to publish the results. Additionally, Authors Dimitris Perikleous, Katerina Margariti, and Pantelis Velanas were employed by the company ACCELIGENCE Ltd. The remaining authors declare that this research was conducted in the absence of any commercial or financial relationships that could be construed as potential conflicts of interest.
References
- Hustrulid, W.A.; Kuchta, M.; Martin, R.K. Open Pit Mine Planning and Design, Two Volume Set & CD-Rom Pack; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar] [CrossRef]
- Moezzi, R.; Kamkar-Rouhani, A.; Arab-Amiri, A.R. Development of Drone-Borne Geophysical Surveys for Mineral Exploration. J. Environ. Sustain. Min. 2024, 2, 40–46. [Google Scholar] [CrossRef]
- Okada, K. Breakthrough technologies for mineral exploration. Miner. Econ. 2022, 35, 429–454. [Google Scholar] [CrossRef]
- Park, S.; Choi, Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals 2020, 10, 663. [Google Scholar] [CrossRef]
- Mollehuara-Canales, R.; Kozlovskaya, E.; Lunkka, J.; Moisio, K.; Pedretti, D. Non-invasive geophysical imaging and facies analysis in mining tailings. J. Appl. Geophys. 2021, 192, 104402. [Google Scholar] [CrossRef]
- Cara, S.; Fais, S.; Ligas, P.; Matzuzzi, C.; Podda, F. Integrated Geological-Geophysical and UAS Proximal Sensing Approach to the Study of Ground Water Movement Between Two Open-Pit Pools in an Abandoned Mine Area. In Proceedings of the EGU General Assembly 2021, Virtual, 19–30 April 2021. [Google Scholar] [CrossRef]
- Becker, A.M.; Becker, R.H.; Doro, K.O. Locating Drainage Tiles at a Wetland Restoration Site within the Oak Openings Region of Ohio, United States Using UAV and Land Based Geophysical Techniques. Res. Sq. 2021, preprint. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The Prisma 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Bucalo, F.; Coltelli, M.; Martorana, R. Drones—New technologies for geophysics? In Proceedings of the Near Surface Geoscience 2015—21st European Meeting of Environmental and Engineering Geophysics, Turin, Italy, 6–10 September 2015. [Google Scholar] [CrossRef]
- Haque, A.; Chowdhury, M.N.-U.-R.; Hassanalian, M. A Comprehensive Review of Classification and Application of Machine Learning in Drone Technology. Preprints 2023, 2023061901. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef]
- Al-Lqubaydhi, N.; Alenezi, A.; Alanazi, T.; Senyor, A.; Alanezi, N.; Alotaibi, B.; Alotaibi, M.; Razaque, A.; Hariri, S. Deep Learning for Unmanned Aerial Vehicles Detection: A Review. Comput. Sci. Rev. 2024, 51, 100614. [Google Scholar] [CrossRef]
- Woodbridge, E.; Connor, D.T.; Verbelen, Y.; Hine, D.; Richardson, T.; Scott, T.B. Airborne gamma-ray mapping using fixed-wing vertical take-off and landing (VTOL) uncrewed aerial vehicles. Front. Robot. AI 2023, 10, 1137763. [Google Scholar] [CrossRef] [PubMed]
- Nikulin, A.; de Smet, T.S. A UAV-based magnetic survey method to detect and identify orphaned oil and Gas Wells. Lead. Edge 2019, 38, 447–452. [Google Scholar] [CrossRef]
- Saponaro, A.; Dipierro, G.; Cannella, E.; Panarese, A.; Galiano, A.M.; Massaro, A. A UAV-GPR Fusion Approach for the Characterization of a Quarry Excavation Area in Falconara Albanese, Southern Italy. Drones 2021, 5, 40. [Google Scholar] [CrossRef]
- Van Der Veeke, S.; Koomans, R.L.; van Egmond, F.M.; Limburg, J. A drone as platform for airborne gamma-ray surveys to characterize soil and monitor contaminations. In Proceedings of the 24th European Meeting of Environmental and Engineering Geophysics, Porto, Portugal, 9–12 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Limburg, H.; van der Veeke, S.; Koomans, R. Towards drone-borne gammaray mapping of Soils. First Break 2019, 37, 55–61. [Google Scholar] [CrossRef]
- Lu, N.; Xi, Y.; Zheng, H.; Gao, W.; Li, Y.; Liu, Y.; Cui, Z.; Liao, G.; Liu, J. Development of a Hybrid Fixed-Wing UAV Aeromagnetic Survey System and an Application Study in Chating Deposit. Minerals 2023, 13, 1094. [Google Scholar] [CrossRef]
- Kim, B.; Lee, S.; Park, G.; Cho, S.J. Development of an unmanned airship for magnetic exploration. Explor. Geophys. 2020, 52, 462–467. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Pal, O.K.; Shovon, M.S.; Mridha, M.F.; Shin, J. A Comprehensive Review of AI-enabled Unmanned Aerial Vehicle: Trends, Vision, and Challenges. arXiv 2023, arXiv:2310.16360. [Google Scholar] [CrossRef]
- Darvishpoor, S.; Roshanian, J.; Raissi, A.; Hassanalian, M. Configurations, flight mechanisms, and applications of unmanned aerial systems: A Review. Prog. Aerosp. Sci. 2020, 121, 100694. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. Reviews of Unmanned Aerial Vehicle (drone) technology trends and its applications in the mining industry. Geosystem Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Ye, L.; Yu, Z.; Zhang, Y.; Chi, C.; Cheng, P.; Chen, J. An Aeromagnetic Compensation Strategy for Large UAVs. Sensors 2024, 24, 3775. [Google Scholar] [CrossRef] [PubMed]
- Accomando, F.; Bonfante, A.; Buonanno, M.; Natale, J.; Vitale, S.; Florio, G. The drone-borne magnetic survey as the optimal strategy for high-resolution investigations in presence of extremely rough terrains: The case study of the taverna san felice quarry dike. J. Appl. Geophys. 2023, 217, 105186. [Google Scholar] [CrossRef]
- Bian, J.; Wang, X.; Gao, S. Experimental aeromagnetic survey using a rotary-wing aircraft system: A case study in Heizhugou, Sichuan, China. J. Appl. Geophys. 2021, 184, 104245. [Google Scholar] [CrossRef]
- Phelps, G.; Bracken, R.; Spritzer, J.; White, D. Achieving sub-nanotesla precision in multirotor UAV aeromagnetic surveys. J. Appl. Geophys. 2022, 206, 104779. [Google Scholar] [CrossRef]
- Li, Y.; Han, Q.; Peng, X.; Li, Q.; Tong, X. A Magnetic Interference Compensation Method for Airborne Electronic Equipment without Current Sensors. Remote Sens. 2022, 14, 4151. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.; Xing, K.; Zhang, X. Unmanned Aerial Vehicles for Magnetic Surveys: A Review on Platform Selection and Interference Suppression. Drones 2021, 5, 93. [Google Scholar] [CrossRef]
- Accomando, F.; Vitale, A.; Bonfante, A.; Buonanno, M.; Florio, G. Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data. Sensors 2021, 21, 5736. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, C.; Su, Z.; Yu, P.; Jiao, J. An Aeromagnetic Compensation Algorithm Based on Radial Basis Function Artificial Neural Network. Appl. Sci. 2023, 13, 136. [Google Scholar] [CrossRef]
- Tolles, W.; Lawson, J. Magnetic Compensation of MAD Equipped Aircraft; Airborne Instruments Lab. Inc.: Mineola, NY, USA, 1950; p. 201. [Google Scholar]
- Jackisch, R.; Madriz, Y.; Zimmermann, R.; Pirttijärvi, M.; Saartenoja, A.; Heincke, B.H.; Salmirinne, H.; Kujasalo, J.-P.; Andreani, L.; Gloaguen, R. Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland. Remote Sens. 2019, 11, 2084. [Google Scholar] [CrossRef]
- Stoll, J.; Moritz, D. Unmanned aircraft systems for rapid near Surface Geophysical Measurements. In Proceedings of the 75th EAGE Conference & Exhibition—Workshops, London, UK, 10–13 June 2013. [Google Scholar] [CrossRef]
- Macharet, D.; Perez-Imaz, H.; Rezeck, P.; Potje, G.; Benyosef, L.; Wiermann, A.; Freitas, G.; Garcia, L.; Campos, M. Autonomous Aeromagnetic Surveys using a fluxgate magnetometer. Sensors 2016, 16, 2169. [Google Scholar] [CrossRef] [PubMed]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from Central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic surveying with a rotary-wing unmanned aircraft system: A case study from a zinc deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2017, 175, 3145–3158. [Google Scholar] [CrossRef]
- Parshin, A.V.; Morozov, V.A.; Blinov, A.V.; Kosterev, A.N.; Budyak, A.E. Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for Traditional Ground Survey. Geo-Spat. Inf. Sci. 2018, 21, 67–74. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Laliberté, J.; Goldie, M.; Wood, A.; Birkett, D. Inversion of magnetic data acquired with a rotary-wing unmanned aircraft system for gold exploration. Pure Appl. Geophys. 2021, 178, 501–516. [Google Scholar] [CrossRef]
- Kim, B.; Jeong, S.; Bang, E.; Shin, S.; Cho, S. Investigation of iron ore mineral distribution using aero-magnetic exploration techniques: Case study at Pocheon, Korea. Minerals 2021, 11, 665. [Google Scholar] [CrossRef]
- Shahsavani, H. An aeromagnetic survey carried out using a rotary-wing UAV equipped with a low-cost magneto-inductive sensor. Int. J. Remote Sens. 2021, 42, 8805–8818. [Google Scholar] [CrossRef]
- Porras, D.; Carrasco, J.; Carrasco, P.; Alfageme, S.; Gonzalez-Aguilera, D.; Lopez Guijarro, R. Drone Magnetometry in Mining Research. An Application in the Study of Triassic Cu–Co–Ni Mineralizations in the Estancias Mountain Range, Almería (Spain). Drones 2021, 5, 151. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-Resolution Unmanned Aerial Vehicle Aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2019, 68, 334–349. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2017, 6, 57–69. [Google Scholar] [CrossRef]
- de Smet, T.S.; Nikulin, A.; Romanzo, N.; Graber, N.; Dietrich, C.; Puliaiev, A. Successful application of drone-based aeromagnetic surveys to locate legacy oil and Gas Wells in Cattaraugus County, New York. J. Appl. Geophys. 2021, 186, 104250. [Google Scholar] [CrossRef]
- Liu, J.; Liu, H.; Liu, R.; Xue, J.; Li, Y.; Wang, F. Application of aeromagnetic survey to mineral exploration of Jinping, Yunnan, China by using Multirotor UAV. Trans. Nonferrous Met. Soc. China 2023, 33, 1550–1558. [Google Scholar] [CrossRef]
- Shahsavani, H.; Smith, R.S. Aeromagnetic gradiometry with UAV, a case study on small iron ore deposit. Drone Syst. Appl. 2024, 12, 1–9. [Google Scholar] [CrossRef]
- Døssing, A.; Lima Simoes da Silva, E.; Martelet, G.; Maack Rasmussen, T.; Gloaguen, E.; Thejll Petersen, J.; Linde, J. A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data. Remote Sens. 2021, 13, 649. [Google Scholar] [CrossRef]
- Martelet, G.; Gloaguen, E.; Døssing, A.; Lima Simoes da Silva, E.; Linde, J.; Rasmussen, T.M. Airborne/UAV Multisensor Surveys Enhance the Geological Mapping and 3D Model of a Pseudo-Skarn Deposit in Ploumanac’h, French Brittany. Minerals 2021, 11, 1259. [Google Scholar] [CrossRef]
- García, J.C.; García, P.C.; Sanchiz, D.P.; Nieto, I.M.; Blázquez, C.S.; Hurtado, P.H. Drone Magnetic and Time Domain Electromagnetic Exploration in Metamorphic Formations: Tool for the Identification of Strategic Sites for Aquifer Exploitation. Appl. Sci. 2023, 13, 10949. [Google Scholar] [CrossRef]
- Cao, W.; Qing, H.; Xu, X.; Liu, C.; Chen, S.; Zhong, Y.; Liu, J.; Li, Y.; Jiang, X.; Gao, D.; et al. Pre-Archaeological Investigation by Integrating Unmanned Aerial Vehicle Aeromagnetic Surveys and Soil Analyses. Drones 2022, 6, 243. [Google Scholar] [CrossRef]
- Schmidt, V.; Coolen, J.; Fritsch, T.; Klingen, S. Towards drone-based magnetometer measurements for archaeological prospection in challenging terrain. Drone Syst. Appl. 2024, 12, 1–15. [Google Scholar] [CrossRef]
- Perikleous, D.; Margariti, K.; Velanas, P.; Blazquez, C.S.; Garcia, P.C.; Gonzalez-Aguilera, D. Application of Magnetometer-Equipped Drone for Mineral Exploration in Mining Operations. Drones 2025, 9, 24. [Google Scholar] [CrossRef]
- Frey, M.; Bossennec, C.; Sass, I. Mapping buried fault zones in a granitic pluton using aeromagnetic data. Pure Appl. Geophys. 2023, 180, 2241–2255. [Google Scholar] [CrossRef]
- Smit, J.P.; Stettler, E.H.; Price, A.B.; Schaefer, M.O.; Schodlok, M.C.; Zhang, R. Use of drones in acquiring B-field total-field electromagnetic data for Mineral Exploration. Miner. Econ. 2022, 35, 455–465. [Google Scholar] [CrossRef]
- Ugalde, H.; Morris, W.; Madriz, Y.; Kirsch, M.; Gloaguen, R.; Schneider, M.; Schiffler, M.; Siemon, B.; Fréville, T.; Munschy, M. Locating skarns with magnetic survey data, Geyer, erzgebirge: Optimizing Data Acquisition Procedures. Geophys. Prospect. 2022, 70, 1273–1292. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Laliberté, J.; Goldie, M.; Wood, A.; Birkett, D. Comparison between ground, helicopter, and unmanned aircraft system magnetic datasets: A case study from the Abitibi Greenstone Belt, Canada. Pure Appl. Geophys. 2022, 179, 1871–1886. [Google Scholar] [CrossRef]
- Parshin, A.; Gatilov, M.; Davidenko, Y.; Bashkeev, A.; Snegirev, N.; Milgunov, A. Using the “Triad” of UAV-TEM, UAV-magnetic prospecting and UAV-gamma-spectrometry: Case of prospecting for blind ore deposits. In Proceedings of the NSG2022 3rd Conference on Airborne, Drone and Robotic Geophysics, Belgrade Serbia, 18–22 September 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Movchan, I.; Shaygallyamova, Z.; Yakovleva, A. Identification of structural control factors of primary gold ore occurrences by method of unmanned aeromagnetic survey by the example of the Neryungrisky district of Yakutia. J. Min. Inst. 2022, 254, 217–233. [Google Scholar] [CrossRef]
- Parshin, A.; Budyak, A.; Chebokchinov, I.; Sapunov, V.; Bulnayev, A.; Morozov, V. Complex UAS-geophysical surveys at the first stages of geological prospecting: Case in the Western Sayan (Russia). In Proceedings of the First EAGE Workshop on Unmanned Aerial Vehicles, Toulouse, France, 2–4 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Parshin, A.; Morozov, V.; Grebenkin, N.; Sapunov, V.; Shikalenko, F.; Rzhevskaya, A. “Quasi-terrestrial” UAV-based geophysical methods: Efficiency and role in geological prospecting. In Proceedings of the Engineering and Mining Geophysics 2018—14th Conference and Exhibition, Almaty, Kazakhstan, 23–27 April 2018. [Google Scholar] [CrossRef]
- Li, W.J.; Qin, X.W.; Gan, X.P. The IGGE UAV aero magnetic and radiometric survey system. In Proceedings of the Near Surface Geoscience 2014—20th European Meeting of Environmental and Engineering Geophysics, Athens, Greece, 14–18 September 2014. [Google Scholar] [CrossRef]
- Anderson, D.; Pita, A. Geophysical surveying with Georanger UAV. In Proceedings of the Infotech@Aerospace, Arlington, VA, USA, 26–29 September 2005. [Google Scholar] [CrossRef]
- Jackisch, R.; Lorenz, S.; Kirsch, M.; Zimmermann, R.; Tusa, L.; Pirttijärvi, M.; Saartenoja, A.; Ugalde, H.; Madriz, Y.; Savolainen, M.; et al. Integrated geological and geophysical mapping of a carbonatite-hosting outcrop in Siilinjärvi, Finland, using unmanned aerial systems. Remote Sens. 2020, 12, 2998. [Google Scholar] [CrossRef]
- Xi, Y.-Z.; Liao, G.-X.; Lu, N.; Li, Y.-B.; Wu, S. Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter. Minerals 2023, 13, 700. [Google Scholar] [CrossRef]
- Jackisch, R.; Heincke, B.H.; Zimmermann, R.; Sørensen, E.V.; Pirttijärvi, M.; Kirsch, M.; Salmirinne, H.; Lode, S.; Kuronen, U.; Gloaguen, R. Drone-based magnetic and multispectral surveys to develop a 3D model for mineral exploration at Qullissat, Disko Island, Greenland. Solid Earth 2022, 13, 793–825. [Google Scholar] [CrossRef]
- Jiang, D.; Zeng, Z.; Zhou, S.; Guan, Y.; Lin, T. Integration of an aeromagnetic measurement system based on an unmanned aerial vehicle platform and its application in the exploration of the ma’anshan magnetite deposit. IEEE Access 2020, 8, 189576–189586. [Google Scholar] [CrossRef]
- Huang, J.-P.; Guo, H.; Han, S.; Huang, Y. Development and application of an aeromagnetic survey system for a large load rotary-wing UAV. Appl. Geophys. 2023, 20. [Google Scholar] [CrossRef]
- Luyendyk, A.P.J. Processing of Airborne Magnetic Data. AGSO J. Aust. Geol. Geophys. 1997, 17, 31–38. [Google Scholar]
- Frid, M.; Frid, V. Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response. Appl. Sci. 2024, 14, 7889. [Google Scholar] [CrossRef]
- Rezaei, A.; Hassani, H.; Moarefvand, P.; Golmohammadi, A. Determination of unstable tectonic zones in C–North deposit, Sangan, NE Iran using GPR method: Importance of structural geology. J. Min. Environ. 2019, 10, 177–195. [Google Scholar] [CrossRef]
- Lombardi, F.; Podd, F.; Solla, M. From Its Core to the Niche: Insights from GPR Applications. Remote Sens. 2022, 14, 3033. [Google Scholar] [CrossRef]
- López, Y.Á.; García-Fernández, M.; Álvarez-Narciandi, G.; Andrés, F.L.-H. Unmanned aerial vehicle-based ground-penetrating radar systems: A Review. IEEE Geosci. Remote Sens. Mag. 2022, 10, 66–86. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, N.; Li, D.; Liu, S.; Ye, Q. The first semi-airborne transient electromagnetic survey for tunnel investigation in very complex terrain areas. Tunn. Undergr. Space Technol. 2023, 132, 104893. [Google Scholar] [CrossRef]
- Prikhodko, A.; Bagrianski, A.; Kuzmin, P. Airborne Natural Total Field Broadband Electromagnetics—Configurations, Capabilities, and Advantages. Minerals 2024, 14, 704. [Google Scholar] [CrossRef]
- Harrison, E.J.; Baranwal, V.C.; Pfaffhuber, A.A.; Christensen, C.W.; Skurdal, G.H.; Rønning, J.S.; Anschütz, H.; Brönner, M. AEM in Norway: A Review of the Coverage, Applications and the State of Technology. Remote Sens. 2021, 13, 4687. [Google Scholar] [CrossRef]
- Wu, X.; Xue, G.; Fang, G.; Li, X.; Ji, Y. The development and applications of the semi-airborne electromagnetic system in China. IEEE Access 2019, 7, 104956–104966. [Google Scholar] [CrossRef]
- Wu, J.; Xiao, D.; Du, B.; Liu, Y.; Zhi, Q.; Wang, X.; Deng, X.; Chen, X.; Zhao, Y.; Huang, Y. Exploring Shallow Geological Structures in Landslides Using the Semi-Airborne Transient Electromagnetic Method. Remote Sens. 2024, 16, 3186. [Google Scholar] [CrossRef]
- Parshin, A.; Bashkeev, A.; Davidenko, Y.; Persova, M.; Iakovlev, S.; Bukhalov, S.; Grebenkin, N.; Tokareva, M. Lightweight Unmanned Aerial System for Time-Domain Electromagnetic Prospecting—The Next Stage in Applied UAV-Geophysics. Appl. Sci. 2021, 11, 2060. [Google Scholar] [CrossRef]
- Hallbauer-Zadorozhnaya, V.D.; Yu, A.; Parshin, A.V.; Stettler, E. Drone based experimental TEM surveys over Lake Baikal and a uranium occurrence. In Proceedings of the 25th EM Induction Workshop, Çeşme, Turkey, 11–17 September 2022. [Google Scholar]
- Davidenko, Y.; Hallbauer-Zadorozhnaya, V.; Bashkeev, A.; Parshin, A. Semi-Airborne UAV-TEM System Data Inversion with S-Plane Method—Case Study over Lake Baikal. Remote Sens. 2023, 15, 5310. [Google Scholar] [CrossRef]
- Success Story 12/2024—First Successful Drone Electromagnetic Survey. Dronesom. Available online: https://dronesom.com/success-story-12-2024-first-successful-drone-electromagnetic-survey/ (accessed on 7 January 2025).
- Siemon, B.; Christiansen, A.V.; Auken, E. A review of helicopter-borne electromagnetic methods for groundwater exploration. Near Surf. Geophys. 2009, 7, 629–646. [Google Scholar] [CrossRef]
- Parshin, A.; Morozov, V.; Snegirev, N.; Valkova, E.; Shikalenko, F. Advantages of Gamma-Radiometric and Spectrometric Low-Altitude Geophysical Surveys by Unmanned Aerial Systems with Small Scintillation Detectors. Appl. Sci. 2021, 11, 2247. [Google Scholar] [CrossRef]
- Kunze, C.; Preugschat, B.; Arndt, R.; Kandzia, F.; Wiens, B.; Altfelder, S. Development of a UAV-Based Gamma Spectrometry System for Natural Radionuclides and Field Tests at Central Asian Uranium Legacy Sites. Remote Sens. 2022, 14, 2147. [Google Scholar] [CrossRef]
- Li, J.; Zhang, W.; Wu, X.; Wu, X.; Wei, B.; Wu, L.; Li, Y.; Wang, P. Design and application of γ-Ray Energy Spectrum Survey System based on UAV. In PBNC 2022, Proceedings of the 23rd Pacific Basin Nuclear Conference, Beijing, China, 1–4 November 2022; Springer Proceedings in Physics; Springer: Singapore, 2023; pp. 581–588. [Google Scholar] [CrossRef]
- Preugschat, B.; Kunze, C.; Wiens, B.; Altfelder, S. Drone-based investigations of uranium mining legacies: An airborne gamma spectrometry method to support, INSPECT, and monitor mine closure processes. In Proceedings of the International Conference on Mine Closure, Brisbane, Australia, 4–6 October 2022; pp. 623–632. [Google Scholar] [CrossRef]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of Legacy Uranium Mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef]
- Šálek, O.; Matolín, M.; Gryc, L. Mapping of radiation anomalies using UAV mini-airborne gamma-ray spectrometry. J. Environ. Radioact. 2018, 182, 101–107. [Google Scholar] [CrossRef] [PubMed]
- Altfelder, S.; Preugschat, B.; Matos, M.; Kandzia, F.; Wiens, B.; Eshmuradov, O.; Kunze, C. Upscaling ground-based backpack gamma-ray spectrometry to spatial resolution of UAV-based gamma-ray spectrometry for system validation. J. Environ. Radioact. 2024, 273, 107382. [Google Scholar] [CrossRef]
- Parshin, A.V.; Budyak, A.E.; Babyak, V.N. Interpretation of integrated aerial geophysical surveys by unmanned aerial vehicles in mining: A case of additional flank exploration. IOP Conf. Ser. Earth Environ. Sci. 2020, 459, 052079. [Google Scholar] [CrossRef]
- Martin, P.G.; Connor, D.T.; Estrada, N.; El-Turke, A.; Megson-Smith, D.; Jones, C.P.; Kreamer, D.K.; Scott, T.B. Radiological Identification of Near-Surface Mineralogical Deposits Using Low-Altitude Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 3562. [Google Scholar] [CrossRef]
- Deng, Z.; Ge, L.; Wen, L.; Guo, S.; Tang, C.; Yu, P.; Chen, Z. Height and terrain correction of UAV radioactive measurements based on DEM Data. J. Environ. Radioact. 2025, 285, 107655. [Google Scholar] [CrossRef]
- Xia, J.; Song, B.; Gu, Y.; Li, Z.; Xu, J.; Ge, L.; Zhang, Q.; Zeng, G.; Liu, Q.; Yang, X. Application of advanced spectral-ratio radon background correction in the UAV-borne gamma-ray spectrometry. Nucl. Eng. Technol. 2023, 55, 2927–2934. [Google Scholar] [CrossRef]
- Hopfner, M.; Brönner, M.; Carter, L.; Nazari-Dehkordi, T.; Menuge, J.; Müller, A.; Williamson, B. Vectoring towards buried high-purity quartz metapegmatites using low-elevation radiometric and soil geochemical surveying: Method validation in Tysfjord, Norway. J. Geochem. Explor. 2025, 270, 107667. [Google Scholar] [CrossRef]
- Erdi-Krausz, G.; Matolin, M.; Minty, B.; Nicolet, J.P.; Reford, W.S.; Schetselaar, E.M. Guidelines for Radioelement Mapping Using Gamma Ray Spectrometry Data; IAEA-TECDOC; International Atomic Energy Agency (IAEA): Vienna, Austria, 2003; Volume 1363, Available online: http://www-pub.iaea.org/MTCD/publications/PDF/te_1363_web.pdf (accessed on 14 April 2025).
- Benson, A. Seismic Tomography: EBSCO. EBSCO Information Services, Inc. 2022. Available online: https://www.ebsco.com/research-starters/earth-and-atmospheric-sciences/seismic-tomography#seismic-surveys (accessed on 14 April 2025).
- Delmonte, N.; Spaggiari, D.; Chiorboli, G.; Fagandini, C.; Zanini, A. An electrical resistivity tomography system for imaging at Laboratory Scale. Measurement 2025, 252, 117366. [Google Scholar] [CrossRef]
- Geophysical Methods. CLU. Available online: https://clu-in.org/characterization/technologies/default2.focus/sec/Geophysical_Methods/cat/Gravity_Methods/ (accessed on 14 April 2025).
- Troccoli, E.B.; Cerqueira, A.G.; Lemos, J.B.; Holz, M. K-means clustering using principal component analysis to Automate label organization in multi-attribute seismic facies analysis. J. Appl. Geophys. 2022, 198, 104555. [Google Scholar] [CrossRef]
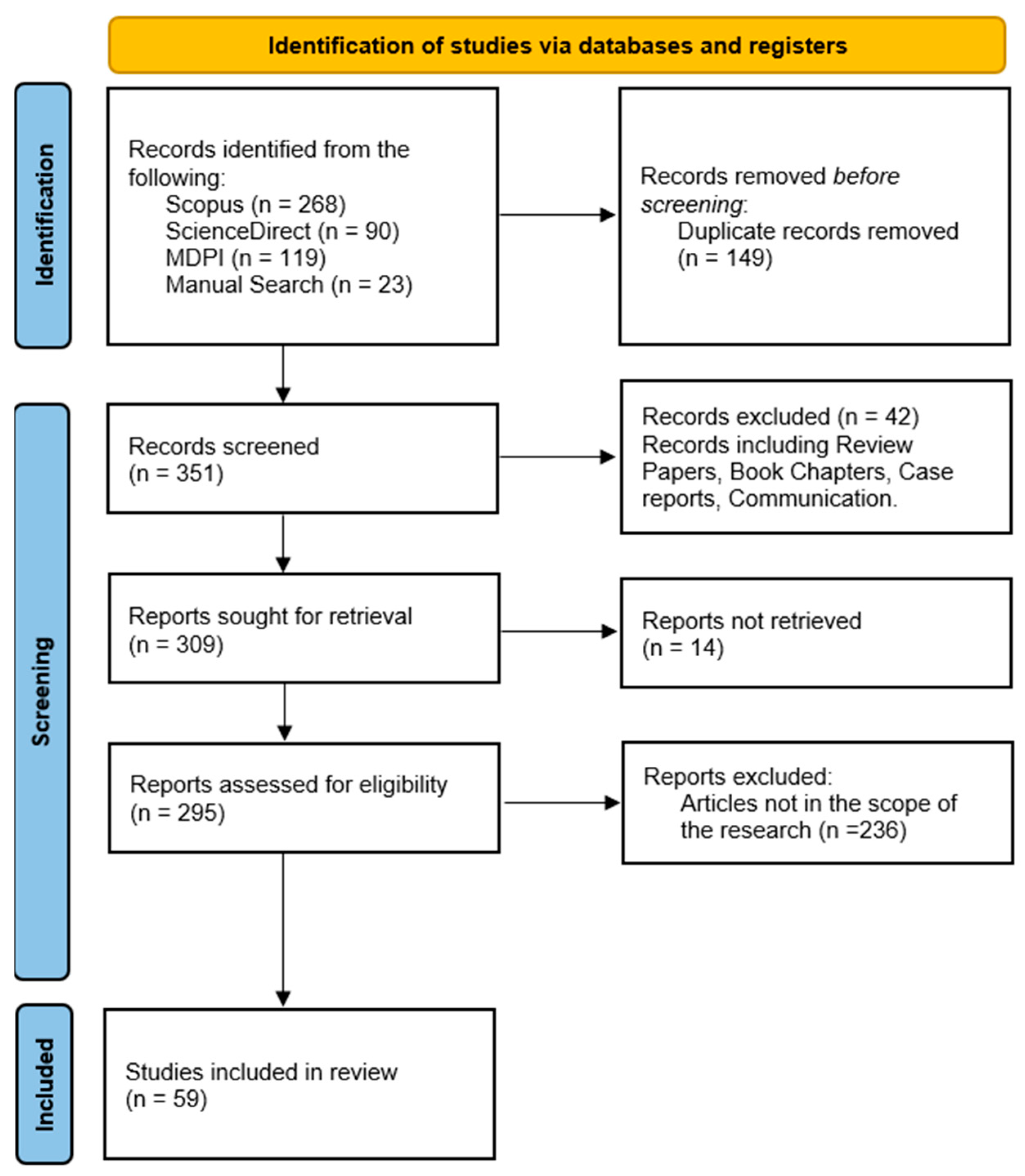
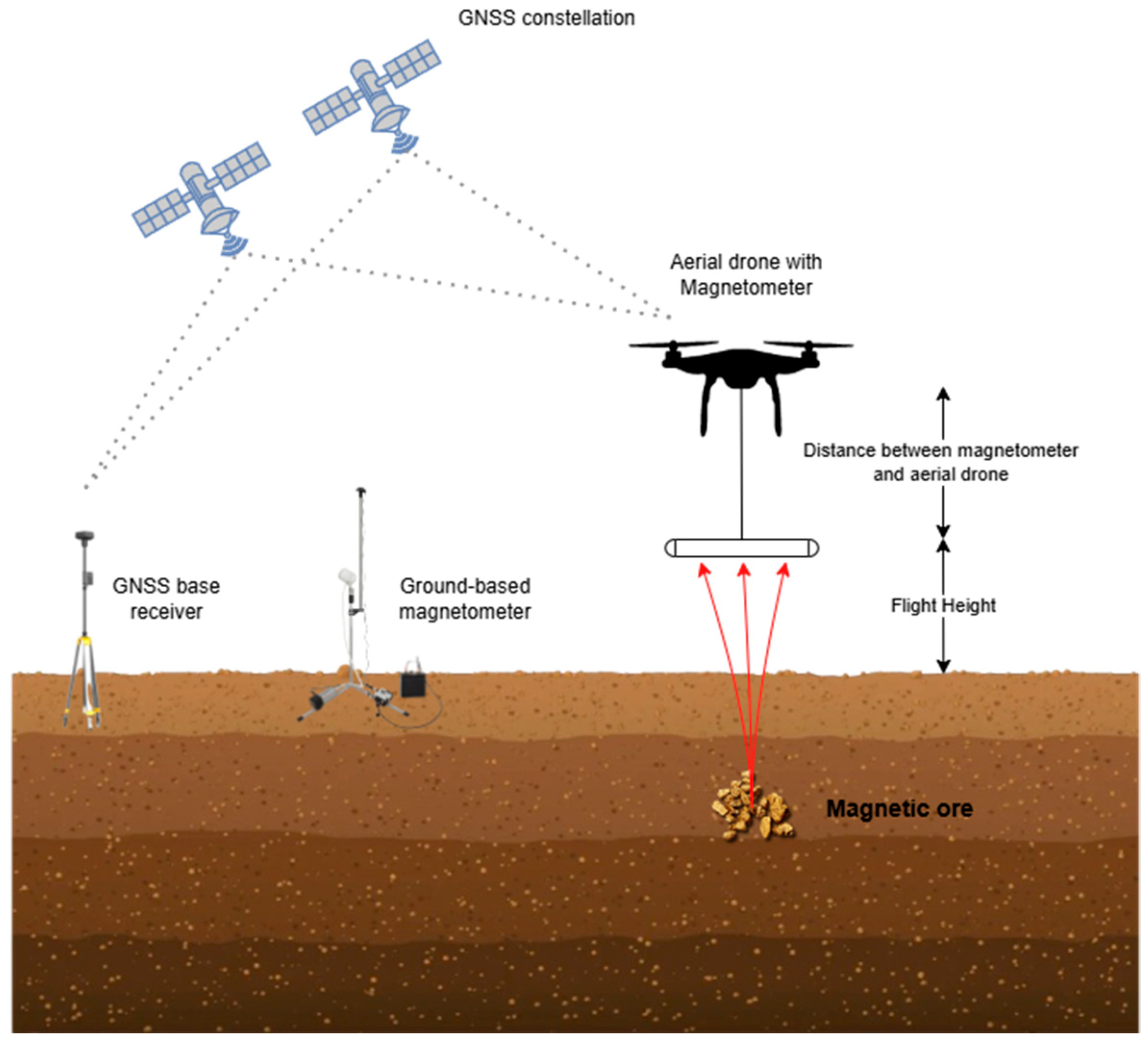
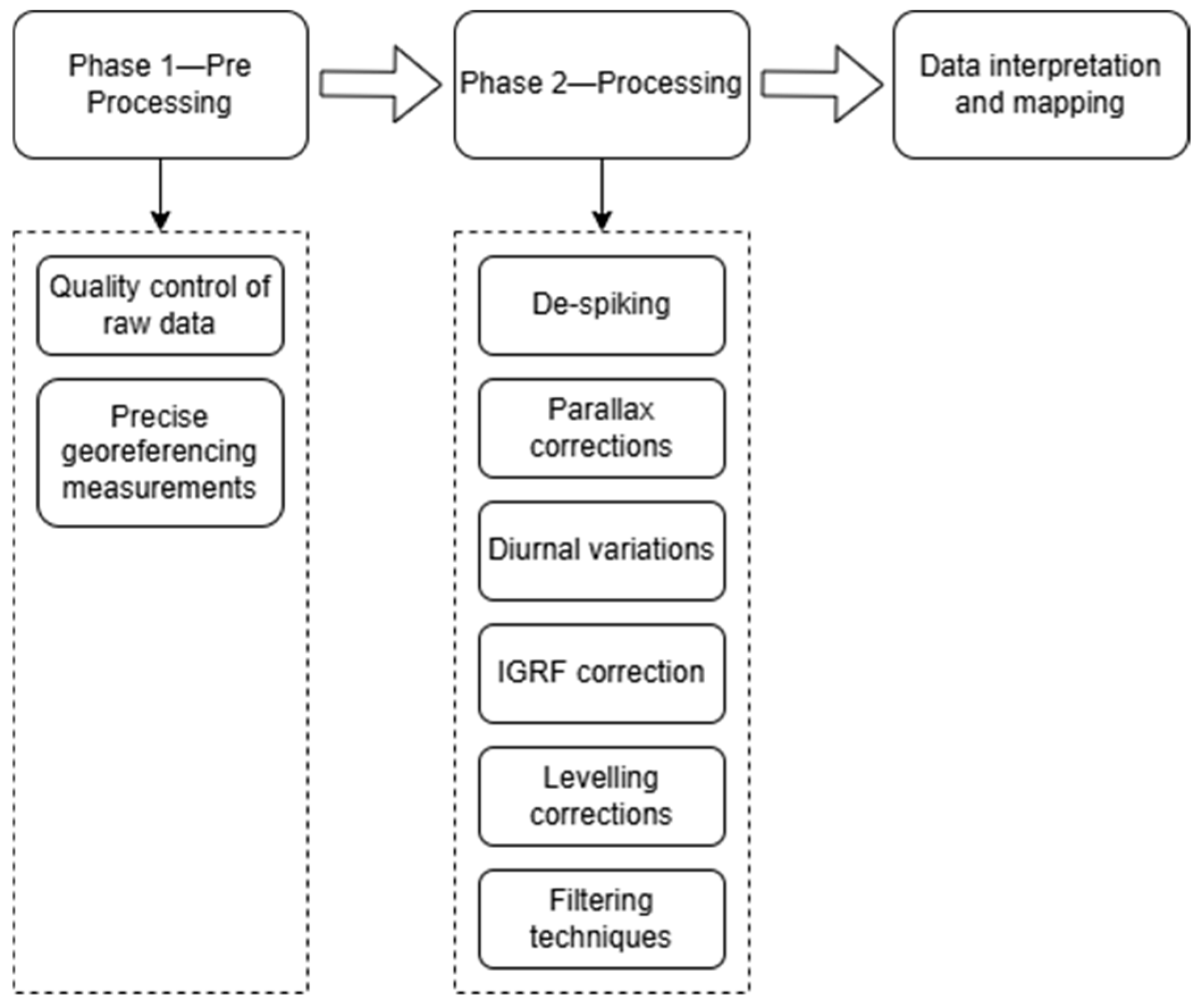
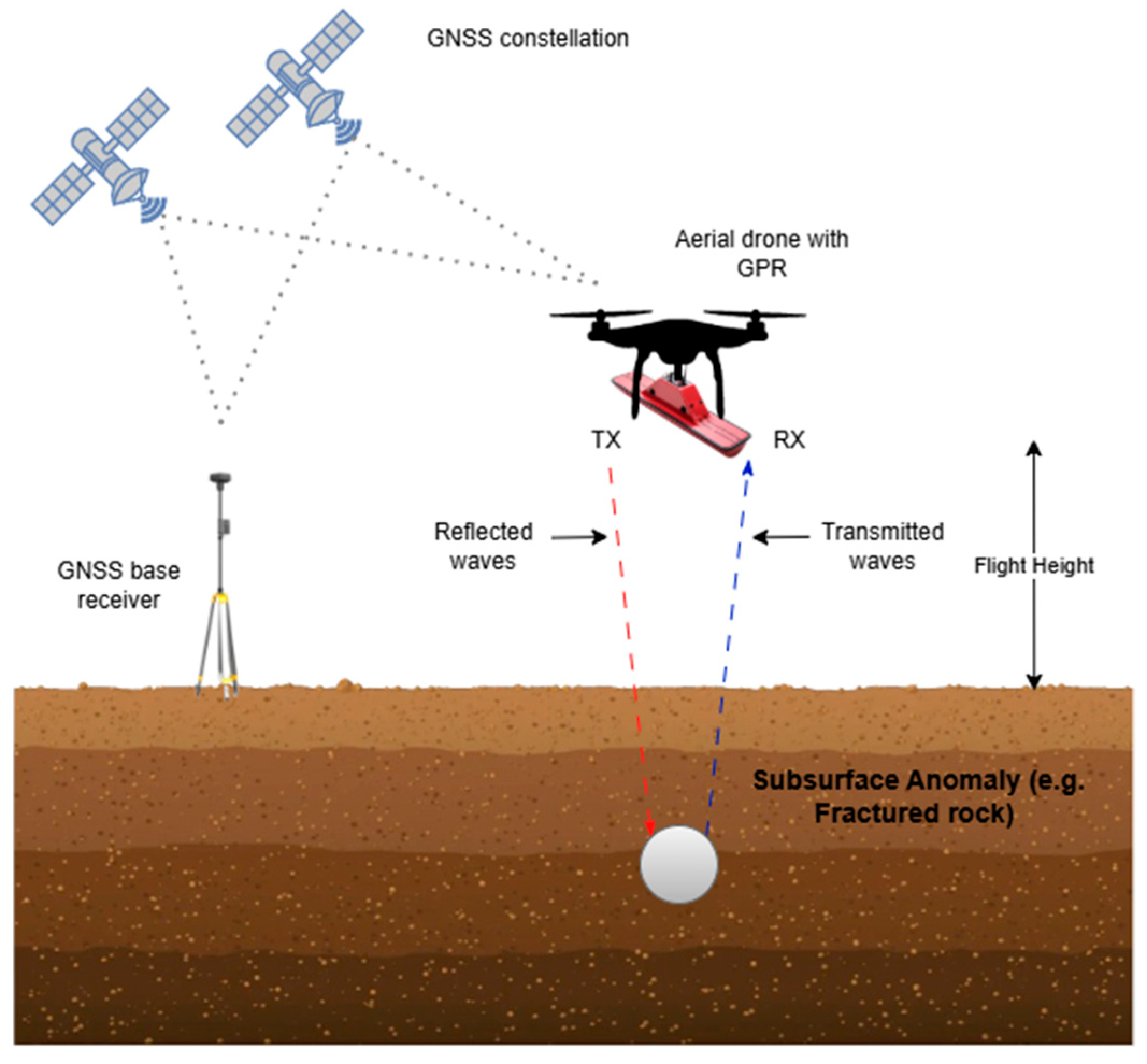
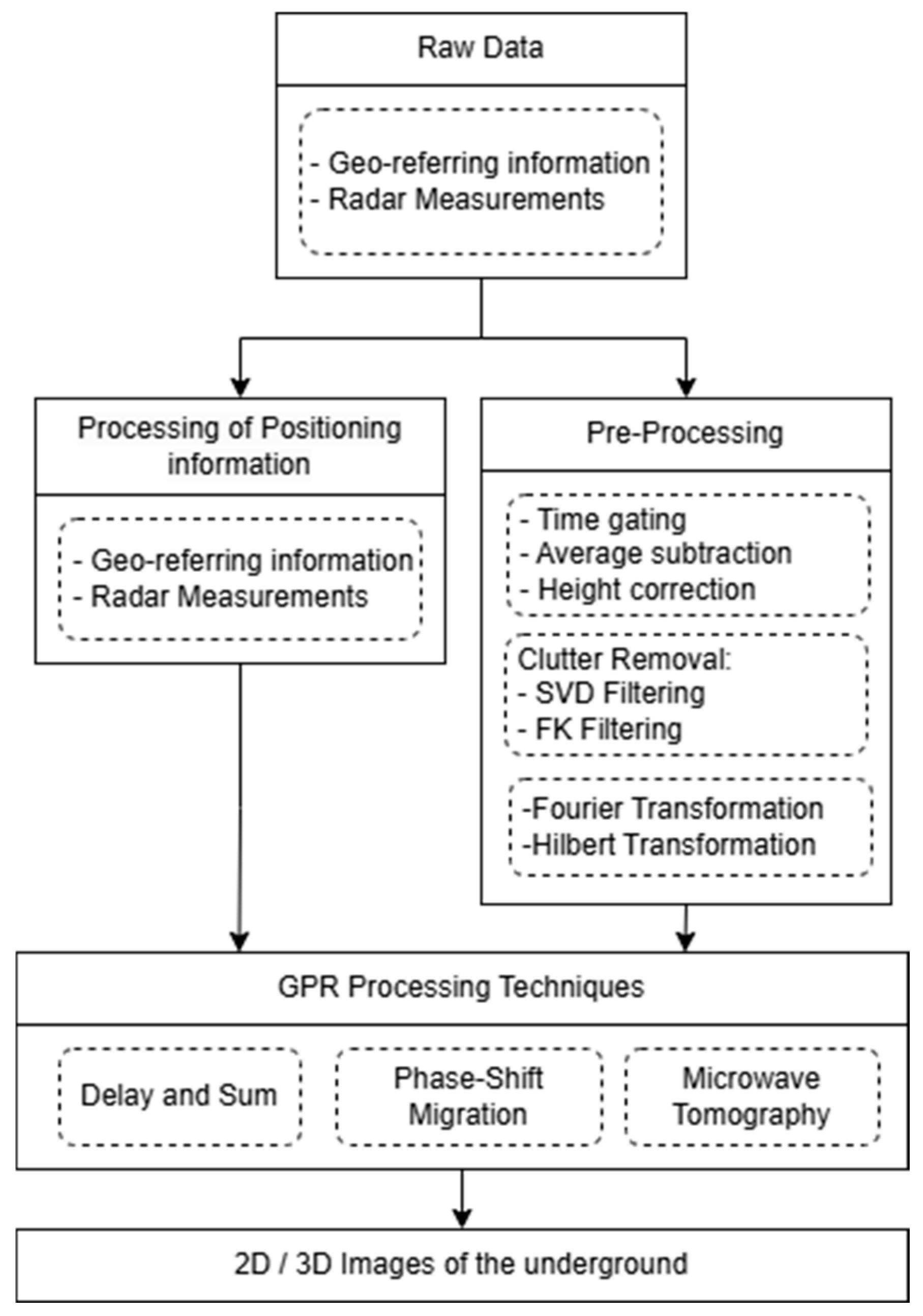
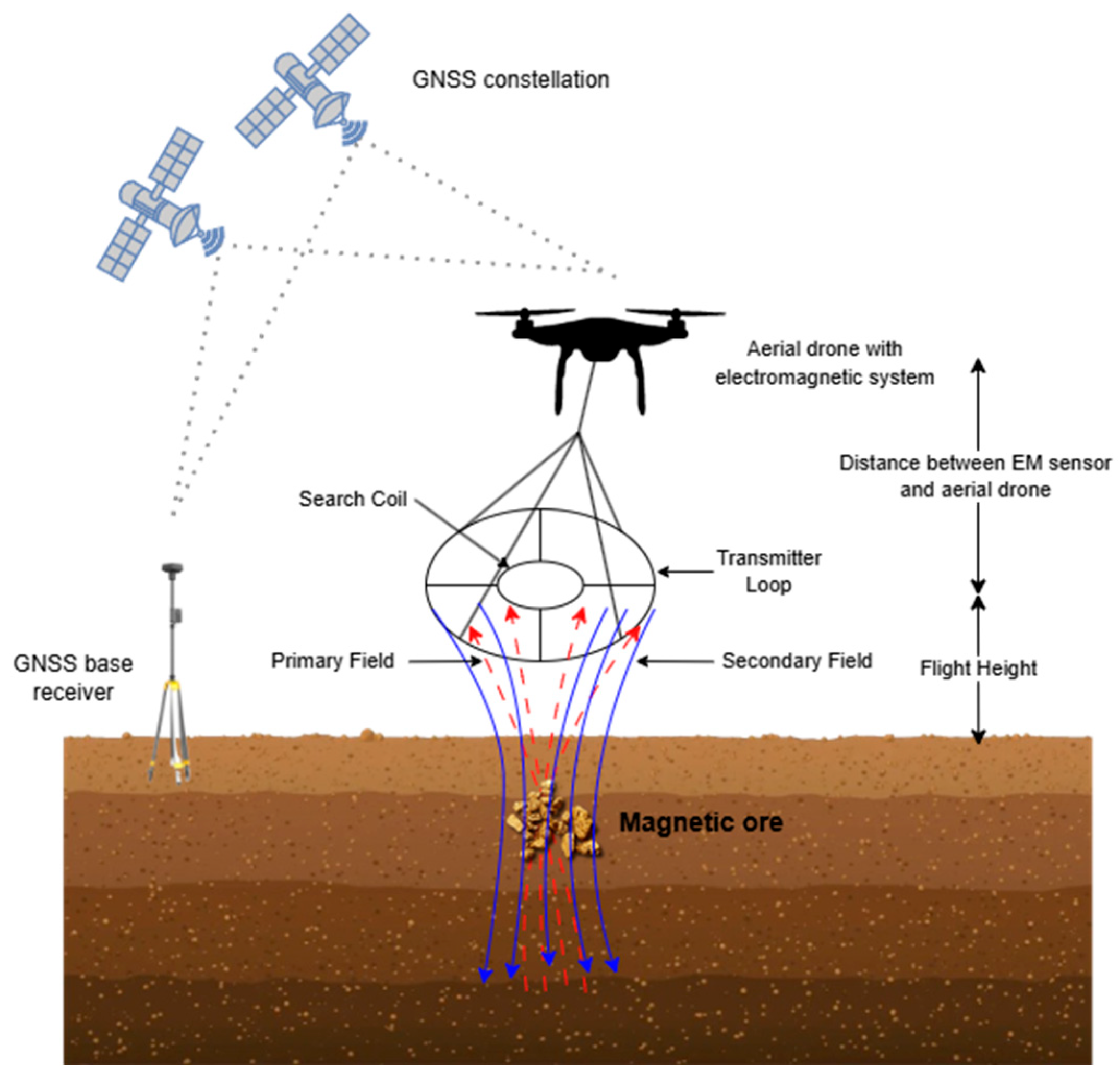
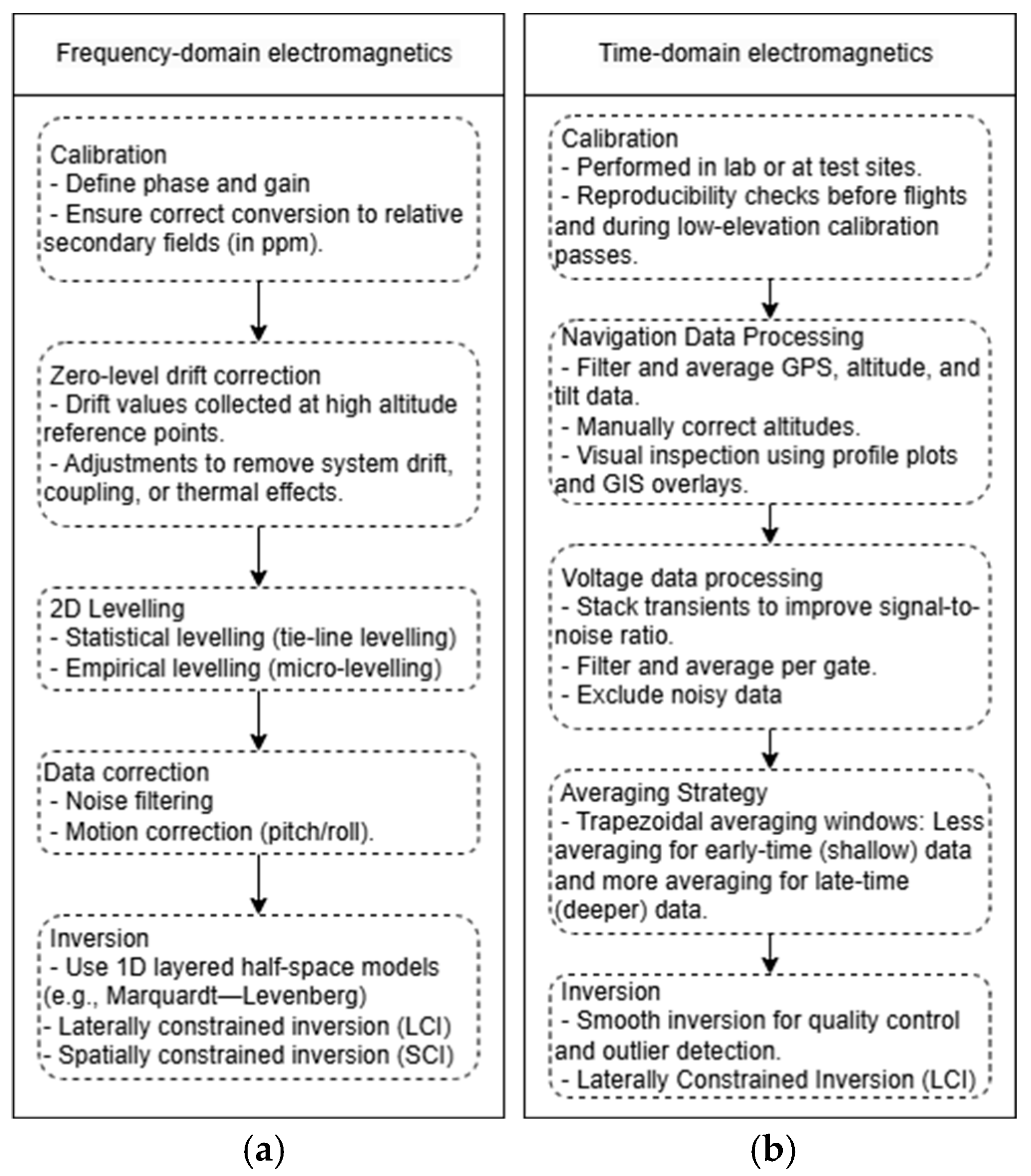
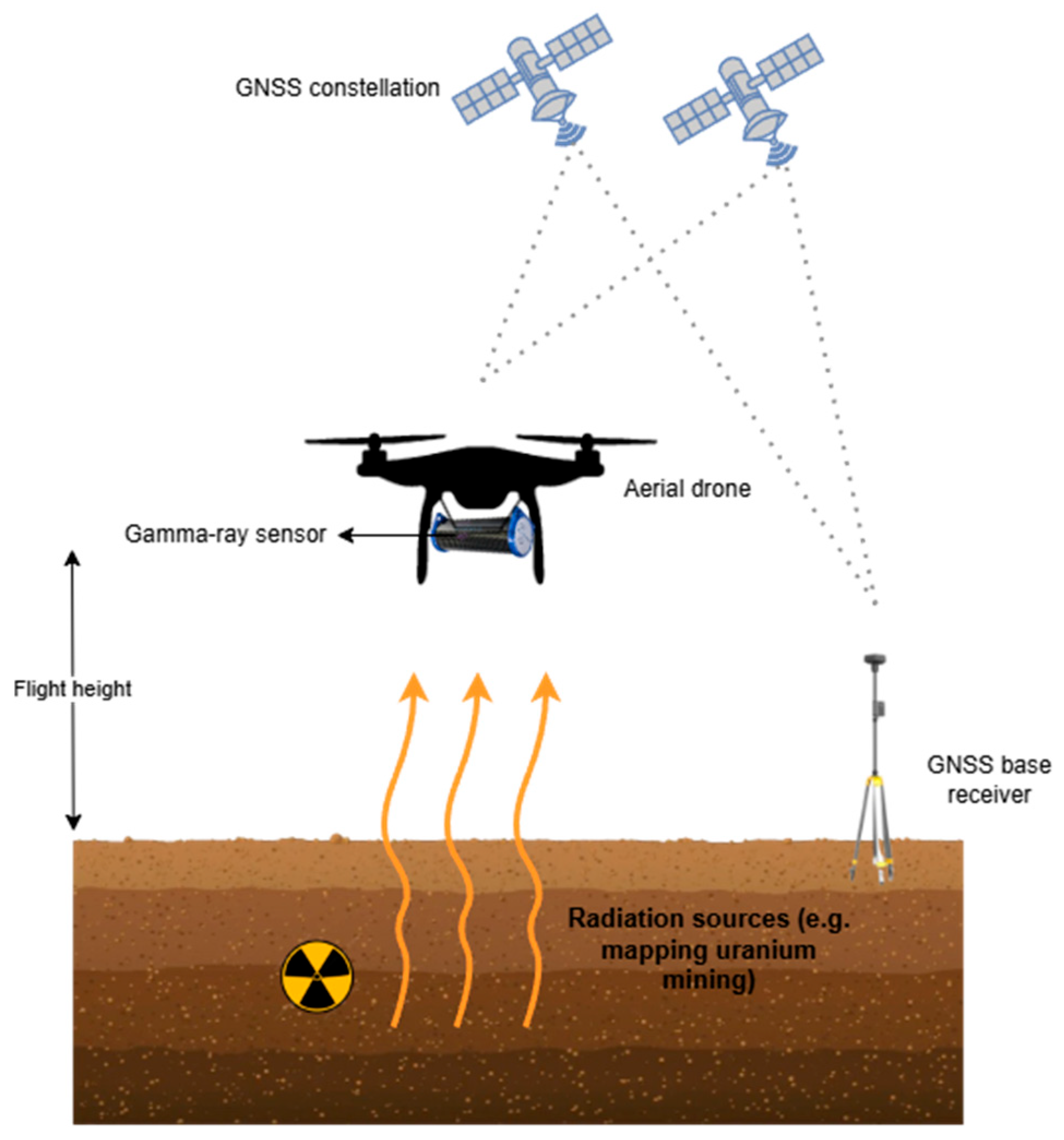
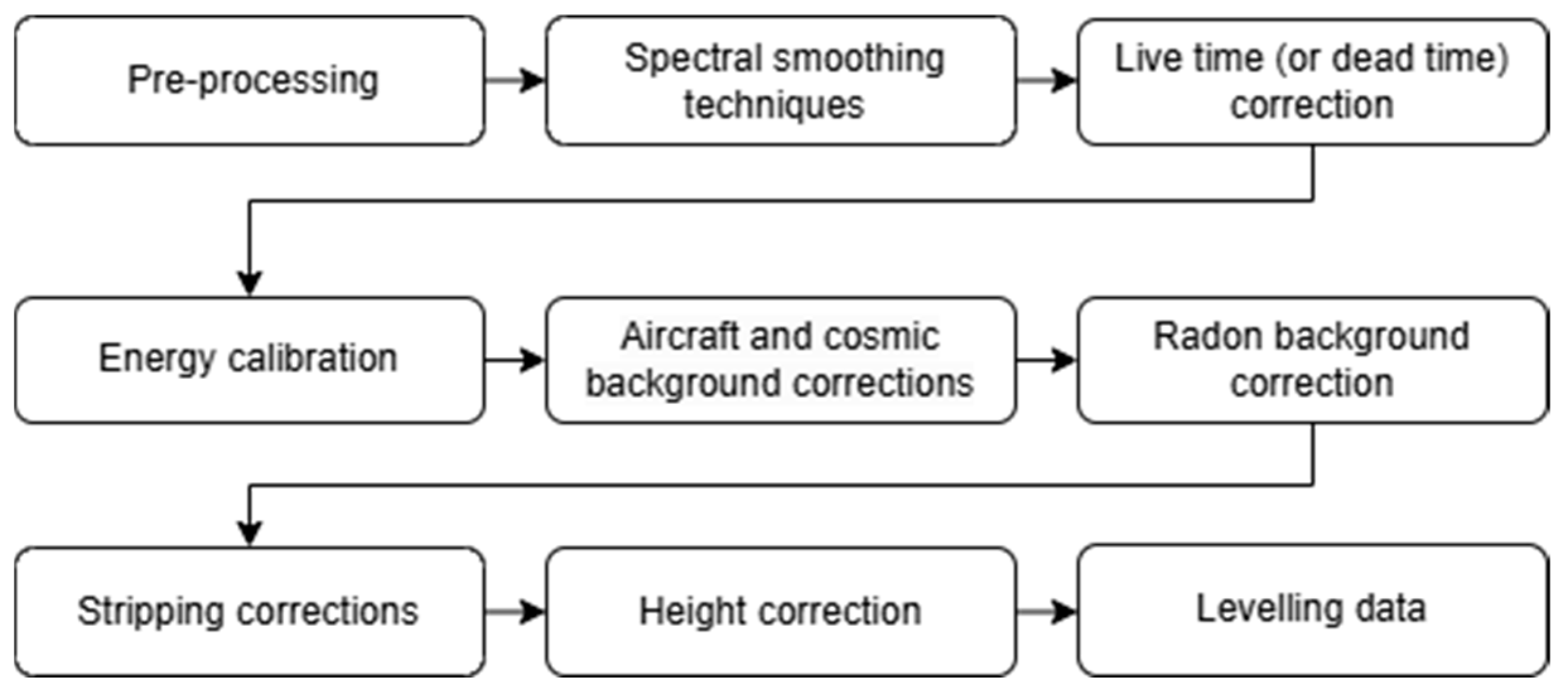
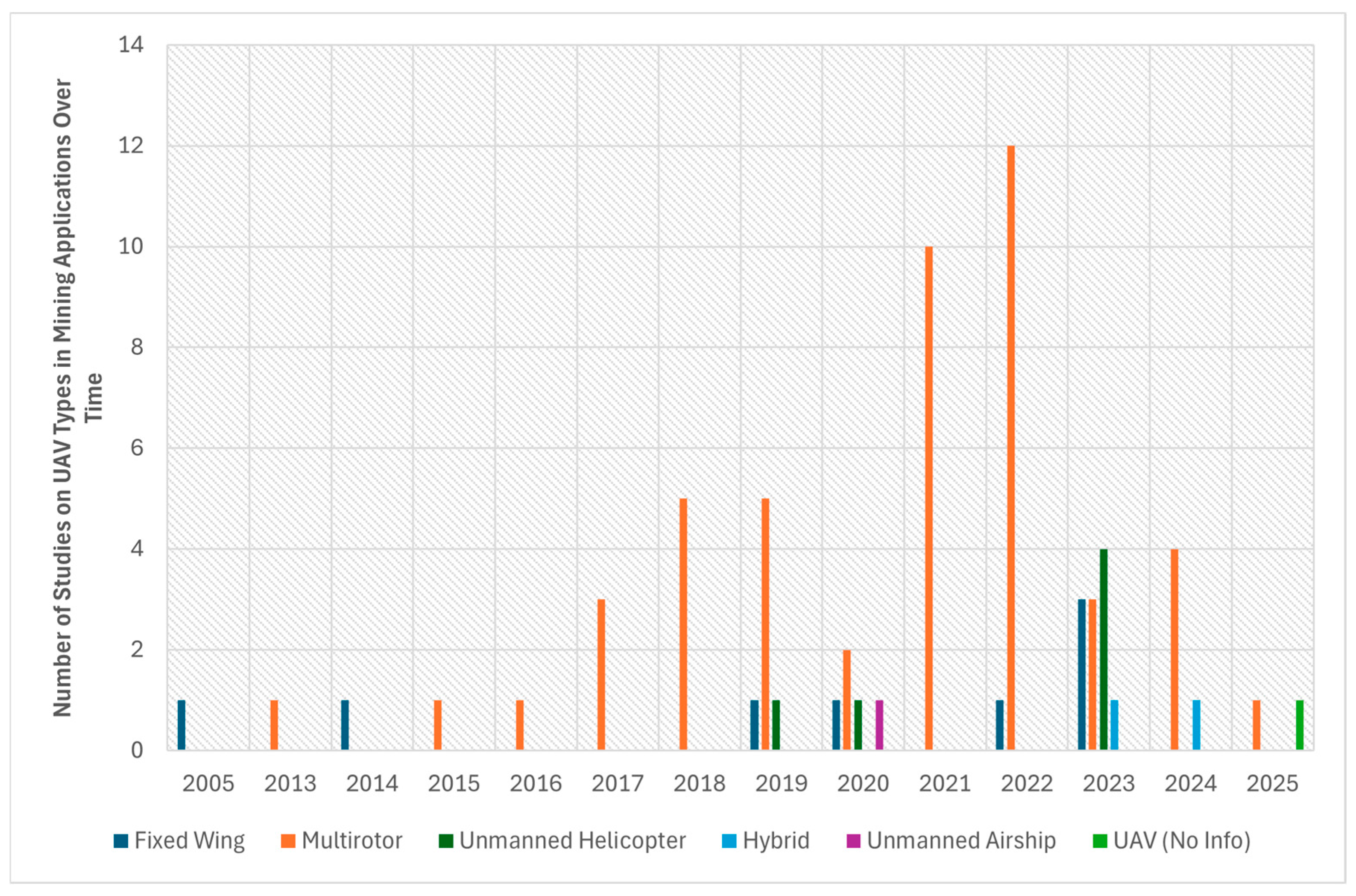
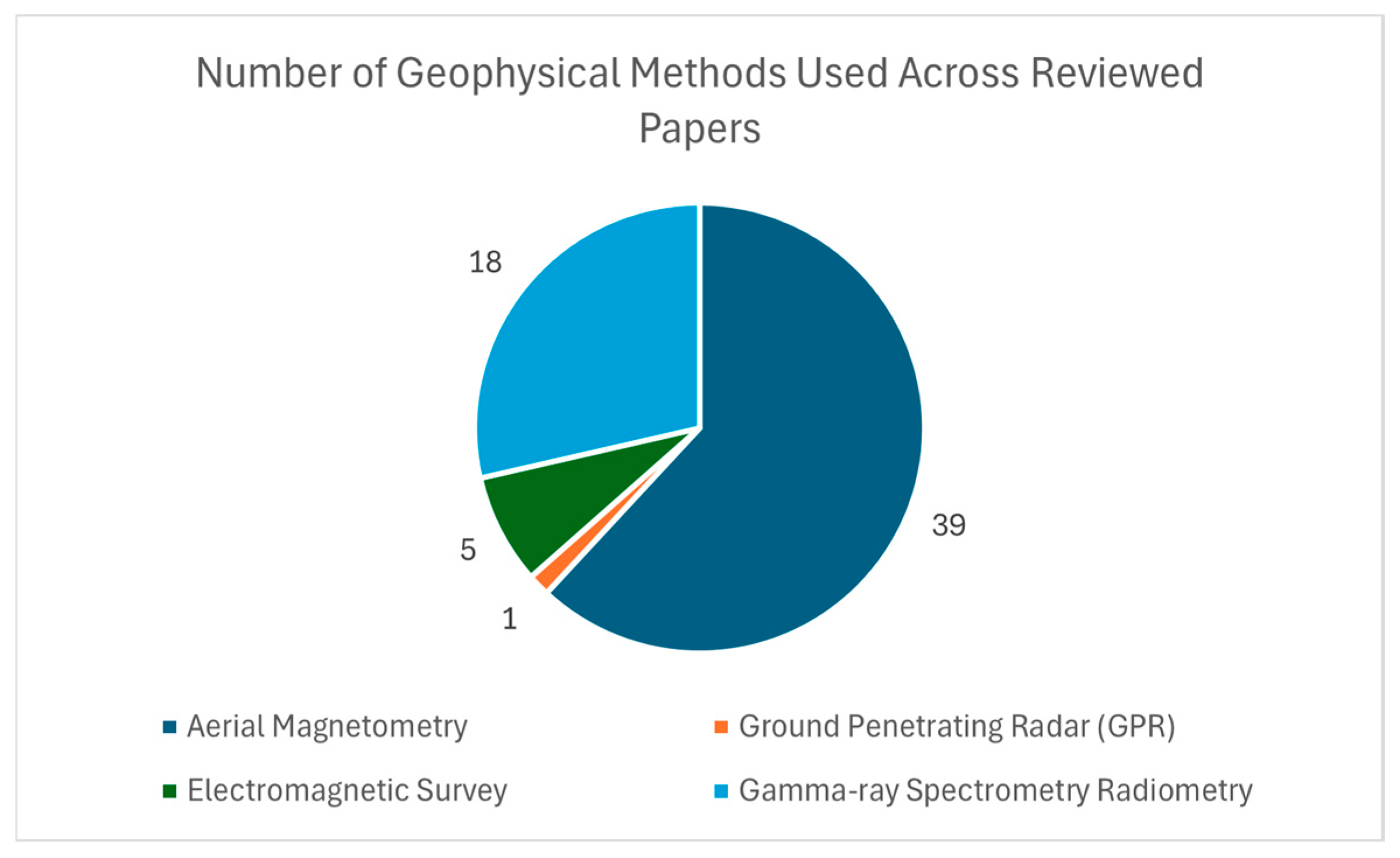





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).