
Power-Efficient UAV Positioning and Resource Allocation in UAV-Assisted Wireless Networks for Video Streaming with Fairness Consideration




Abstract
1. Introduction
Organization
2. Related Work and Contribution
2.1. Fairness in Quality of Experience
2.2. Video Quality
2.3. Contributions
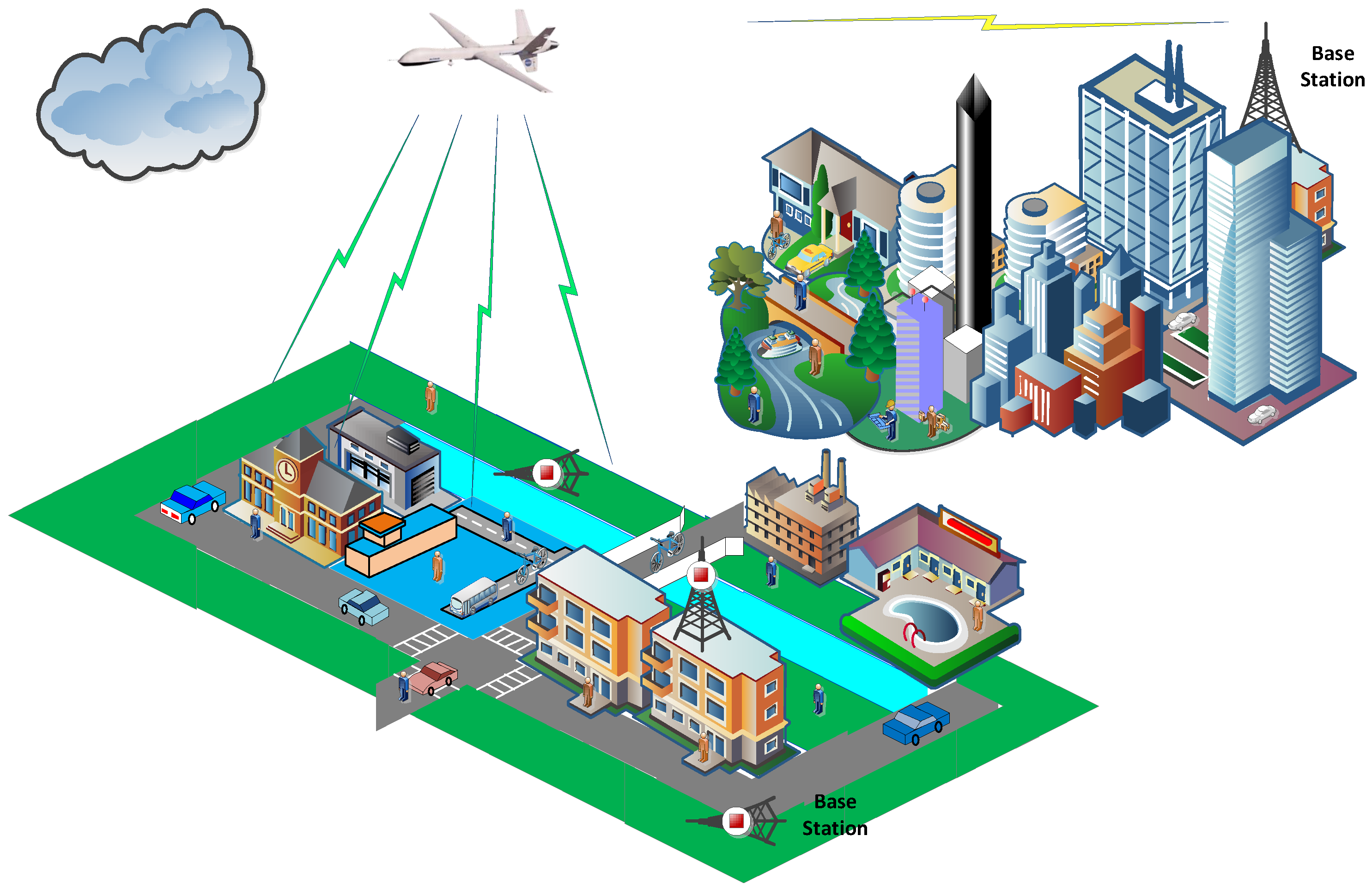
- A UAV-assisted network is considered where a UAV is acting as an aerial relay for relaying video communication between the BS and ground users.
- The investigation focuses on the total power dissipation of UAVs, including the transmission power of UAVs for ground users and the amount of power required for signal processing in the circuitry of UAV systems.
- Bitrate unfairness among users causes degradation of quality of experience; therefore, to improve overall quality of experience among users, this study also considers the quality of experience metrics in terms of fairness among multiple ground users.
- The variability in video quality is a significant factor to consider, as frequent changes in video rate can lead to a drop in quality of experience (QoE). On the other hand, seamless switching results in improved QoE performance [15]. Thus, the extent of variations in video rate quality, specifically in terms of video rate switching, is evaluated on a session-by-session basis.
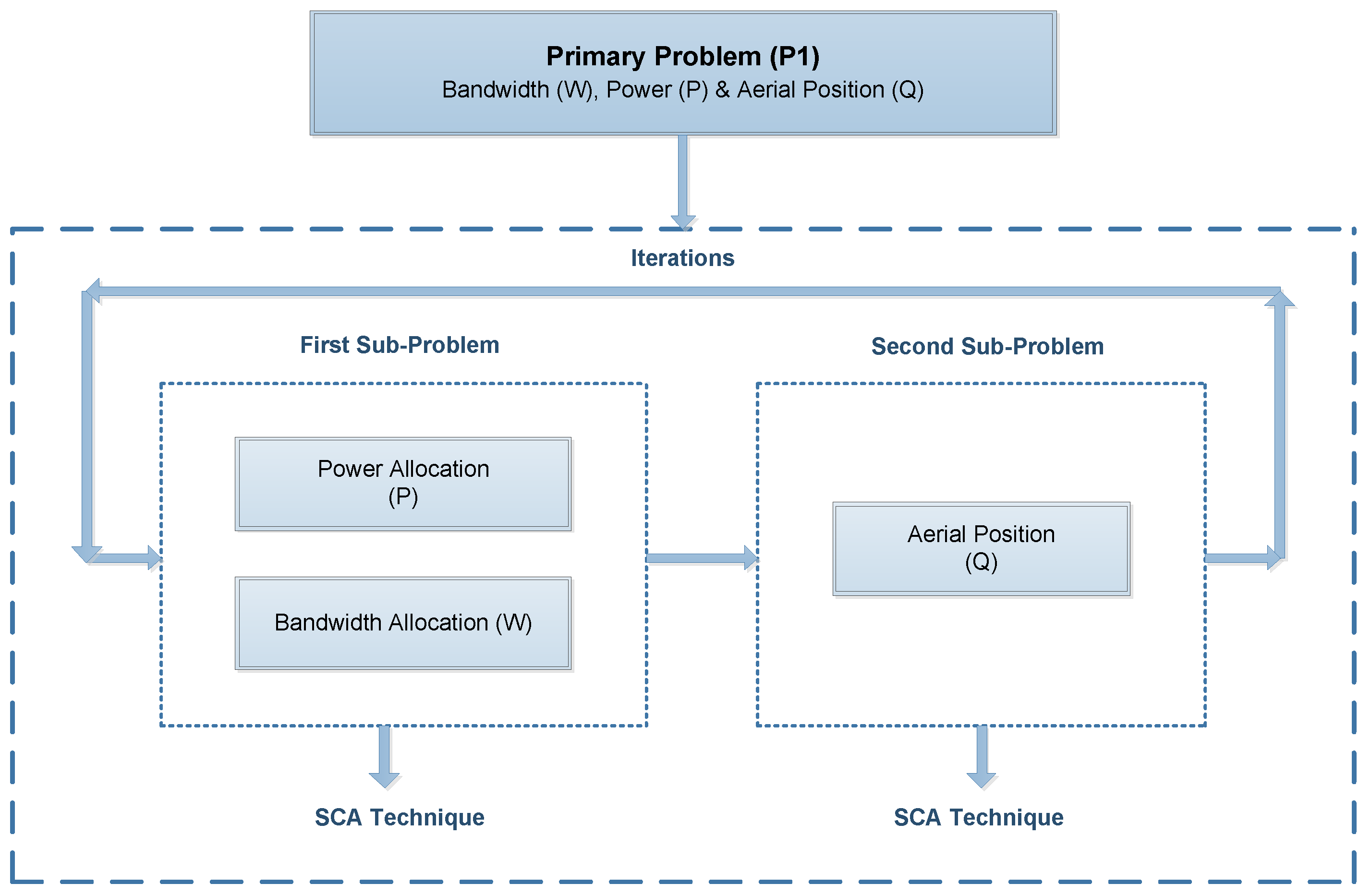
- This study aims to optimize resource allocation, UAV 2D position, and informational causality constraints while considering the available energy budget. Nevertheless, the core problem at hand is non-convex and intricately interconnected, making it challenging to solve using conventional methods. To address this matter, the main problem is split into two sub-problems, and optimization techniques like Dinkelbach, which is used to solve convex fractional programming problems by transforming them into non-fractional form; the block coordinate descent technique, which is used to solve blocks of sub-optimization problems in an alternative way; and the successive convex approximation (SCA) method, which is used to solve non-convex optimization problems iteratively, are employed to obtain the efficient solution.
- Finally, an efficient iterative algorithm is used to solve both sub-problems iteratively. Moreover, the proposed design sets up a good tradeoff between system throughput in terms of video data rate for adaptive video streaming and power consumption while ensuring the fairness and quality of video transmission for providing valuable video streaming services among multiple ground users.
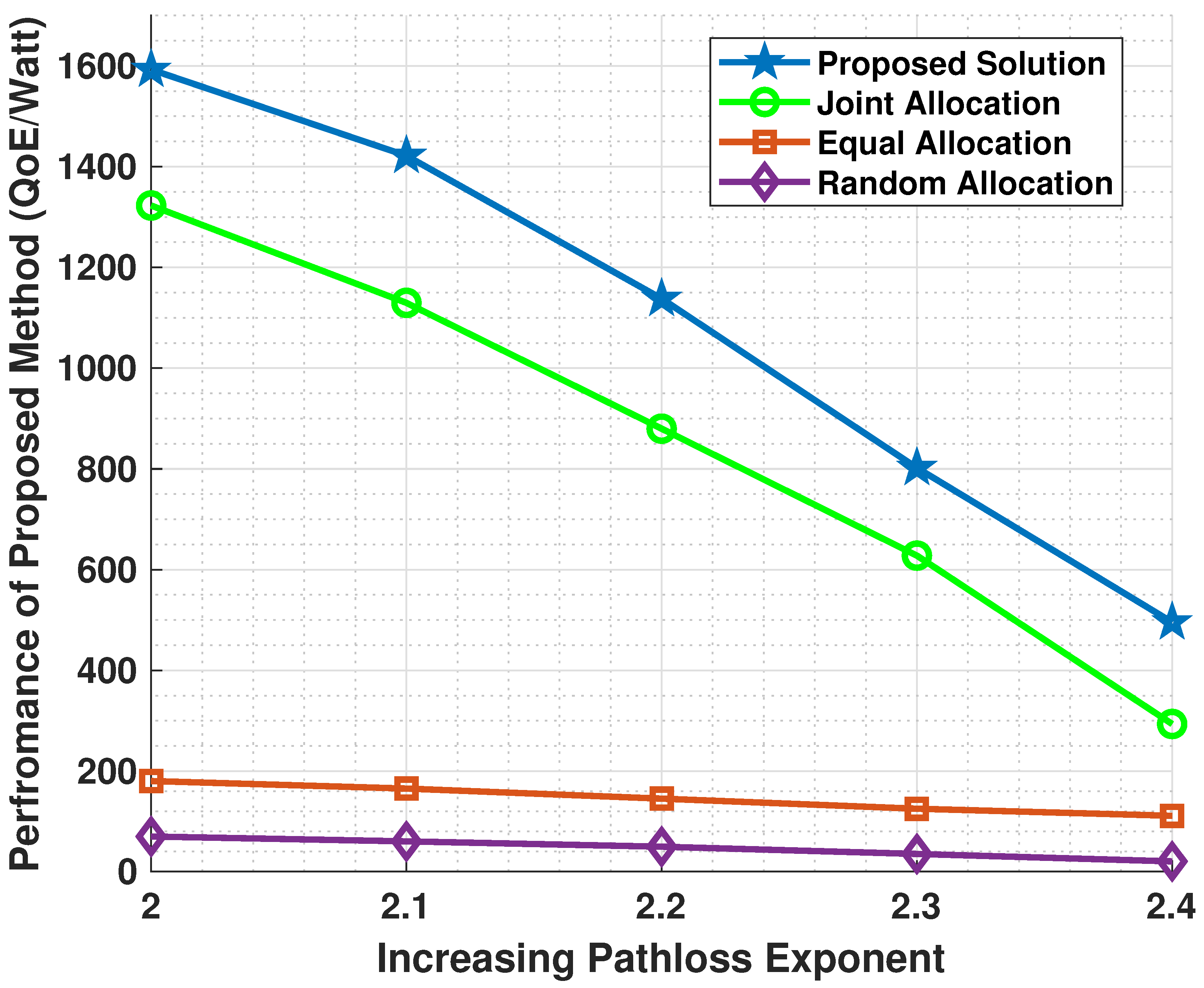
- Extensive simulations are performed by using MATLAB version R2024b software and the proposed method is evaluated for performance and efficiency with other benchmark schemes, with different video scenarios, etc.Table 1. Summarized comparison of the proposed work with related works.
Paper Objective UAV Power Bandwidth Positioning [15] max QoE(rate, fairness, video quality) No No Yes No [17] Max QoE (EE) Yes Yes No Yes [27] Max sum Rate Yes Yes No Yes [29] Max EE Yes Yes No Yes [34] Min Energy cost Yes Yes No Yes [37] Max sum Rate Yes Yes No Yes [45] Max QoE (Fairness) No No Yes No [47] Max QoE (fairness, adaptive video streaming) No No Yes No [54] Max EE Yes Yes No Yes Proposed Max QoE (adaptive video streaming, fairness, video quality, power efficiency) Yes Yes Yes Yes

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
3. System Model and Primary Problem
3.1. System Model
Channel Model
3.2. Primary Problem
4. Proposed Solution Method
4.1. Optimization of Bandwidth and Transmit Power Allocation
4.2. Optimization of UAV’s Aerial Position
4.3. Review of Efficient Iterative Algorithm
| Algorithm 1 Efficient Iterative Algorithm |
|
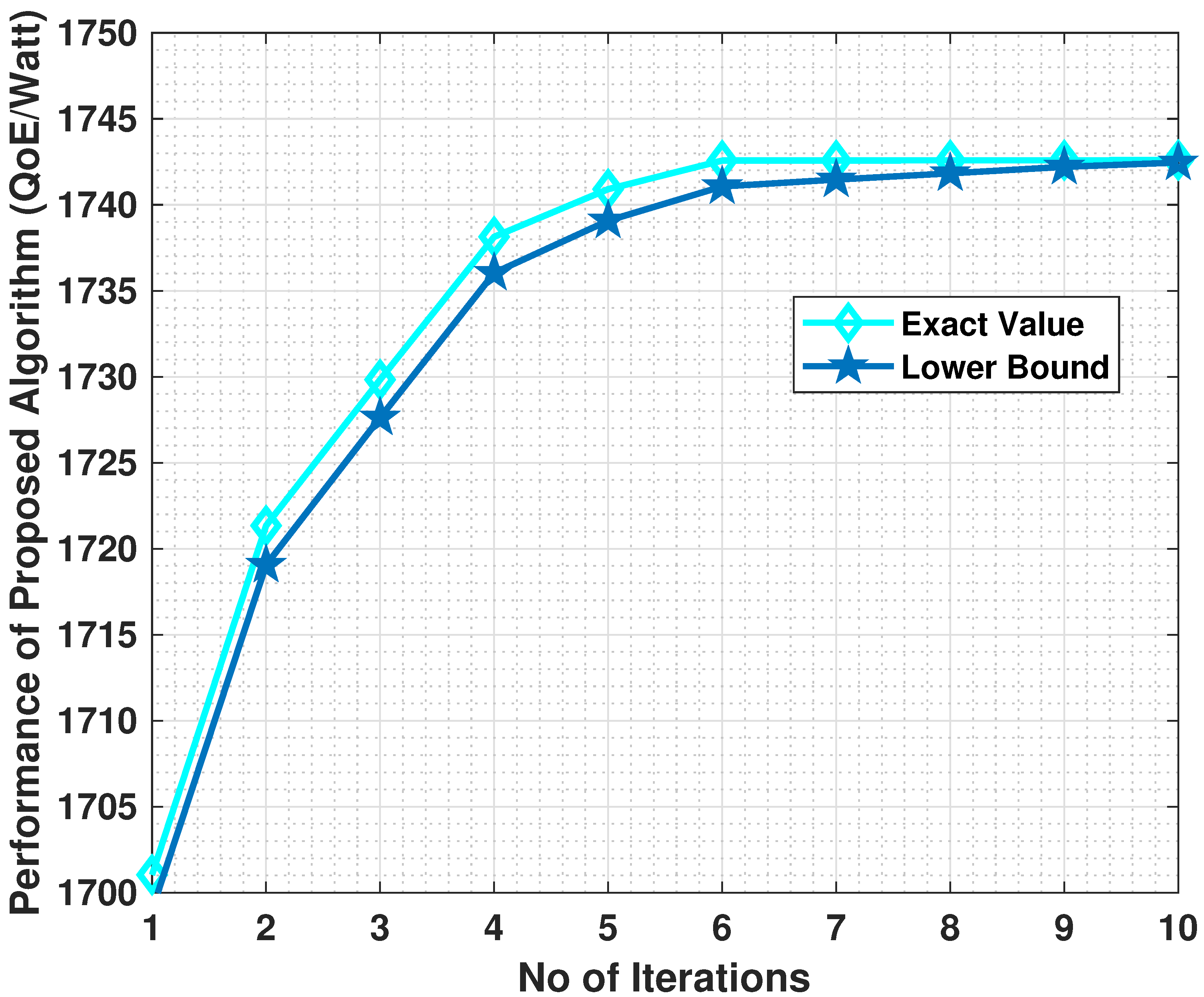
4.3.1. Convergence Analysis of Iterative Algorithm 1
4.3.2. Complexity Analysis of Iterative Algorithm 1
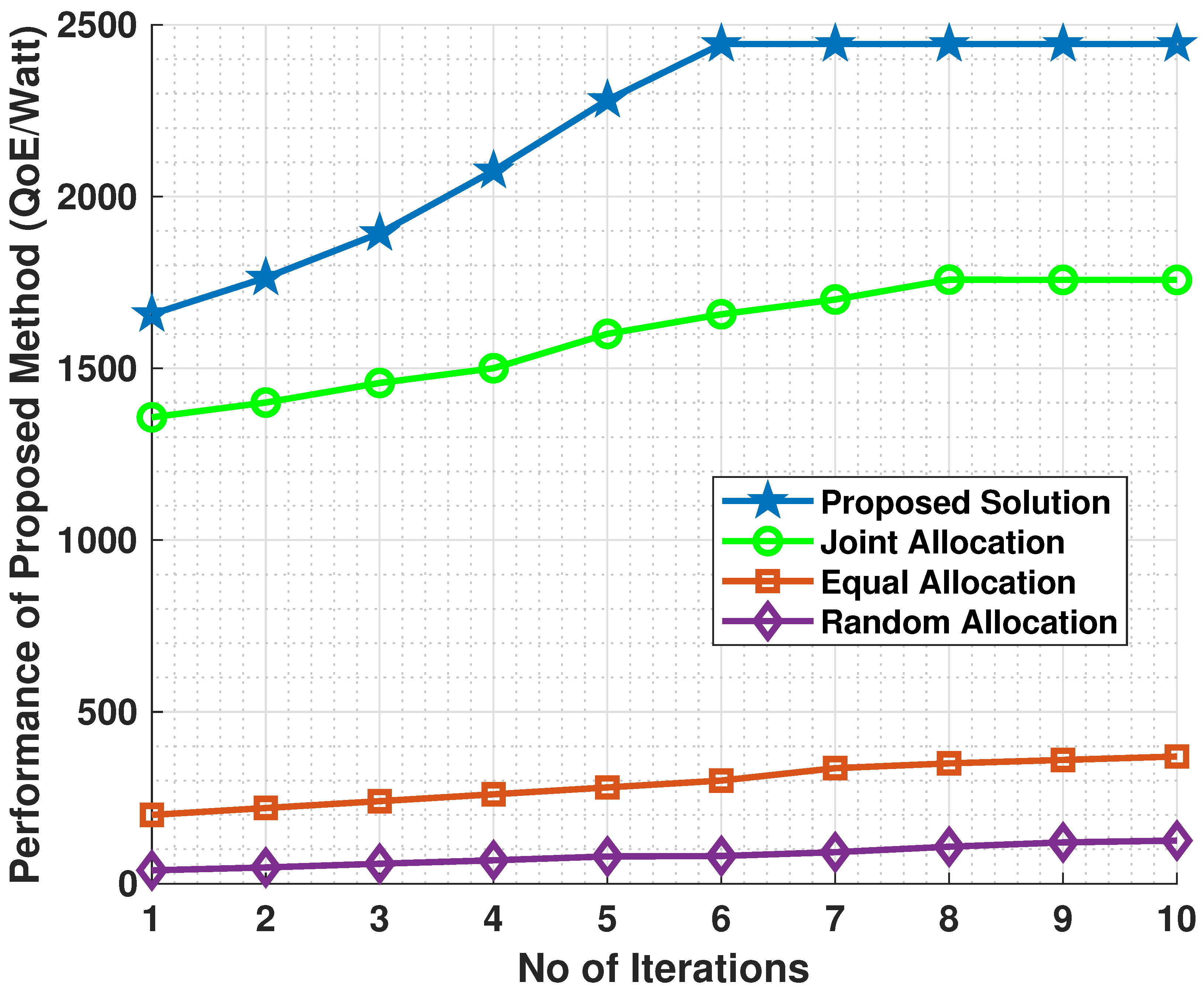
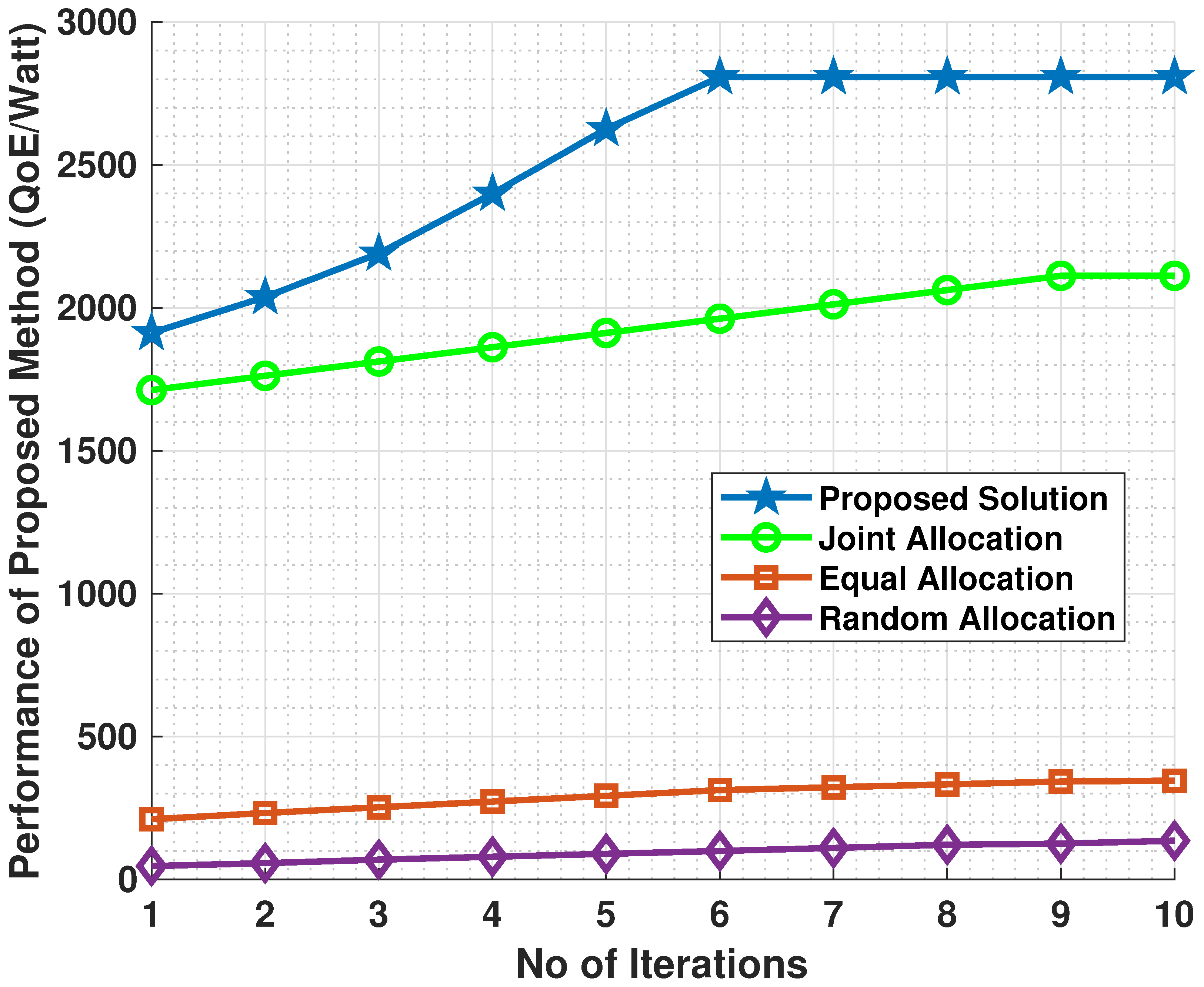
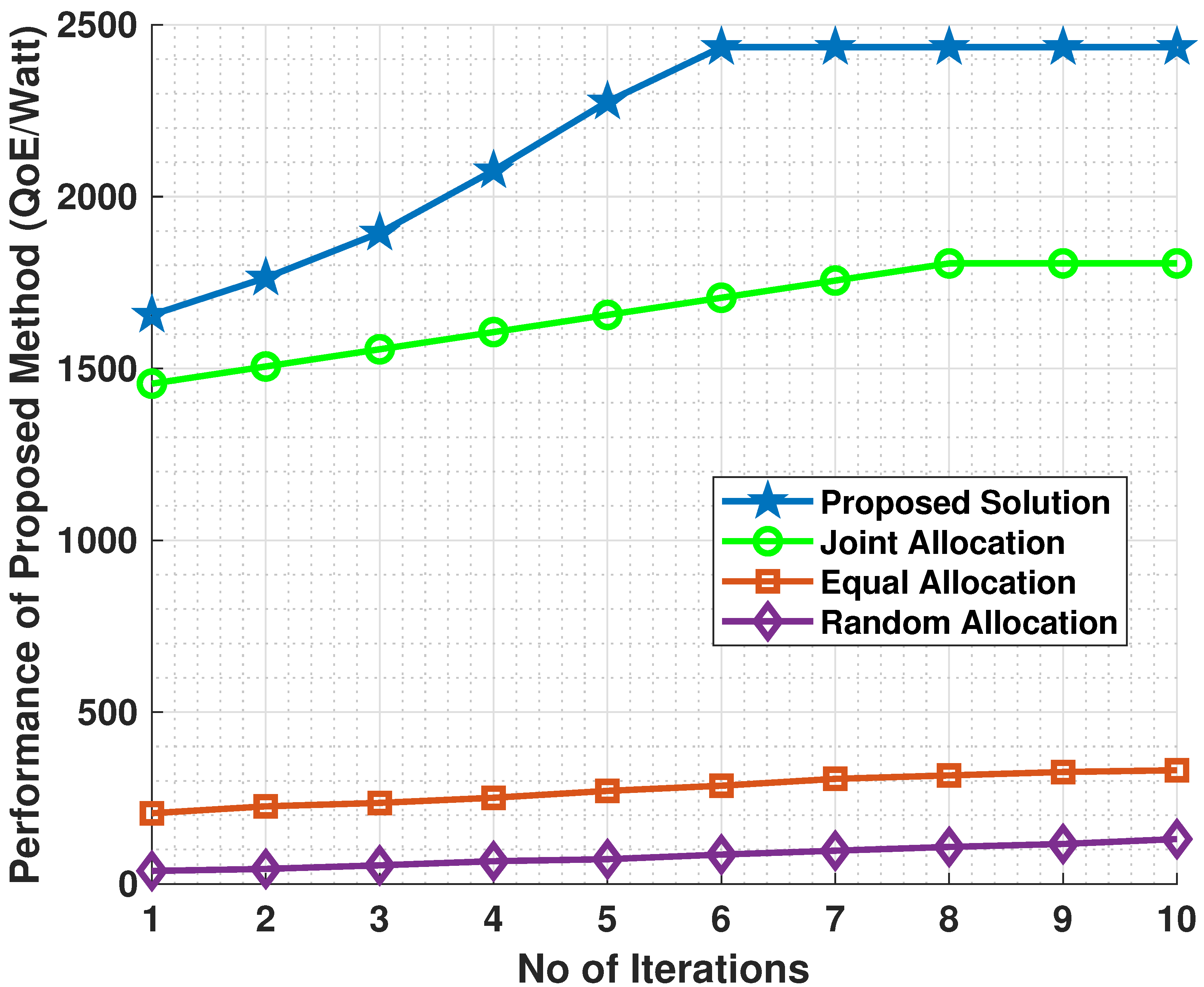
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Geraci, G.; Garcia-Rodriguez, A.; Azari, M.M.; Lozano, A.; Mezzavilla, M.; Chatzinotas, S.; Chen, Y.; Rangan, S.; Di Renzo, M. What will the future of UAV cellular communications be? A flight from 5G to 6G. IEEE Commun. Surv. Tutor. 2022, 24, 1304–1335. [Google Scholar] [CrossRef]
- Mahmood, A.; Vu, T.X.; Khan, W.U.; Chatzinotas, S.; Ottersten, B. Optimizing Computational and Communication Resources for MEC Network Empowered UAV-RIS Communication. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 4–8 December 2022; pp. 974–979. [Google Scholar]
- Chang, Z.; Deng, H.; You, L.; Min, G.; Garg, S.; Kaddoum, G. Trajectory design and resource allocation for multi-UAV networks: Deep reinforcement learning approaches. IEEE Trans. Netw. Sci. Eng. 2022, 10, 2940–2951. [Google Scholar] [CrossRef]
- Shehzad, M.K.; Ahmad, A.; Hassan, S.A.; Jung, H. Backhaul-aware intelligent positioning of UAVs and association of terrestrial base stations for fronthaul connectivity. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2742–2755. [Google Scholar] [CrossRef]
- Nikooroo, M.; Becvar, Z. Optimization of total power consumed by flying base station serving mobile users. IEEE Trans. Netw. Sci. Eng. 2022, 9, 2815–2832. [Google Scholar] [CrossRef]
- binti Burhanuddin, L.A.; Liu, X.; Deng, Y.; Challita, U.; Zahemszky, A. QoE optimization for live video streaming in UAV-to-UAV communications via deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 71, 5358–5370. [Google Scholar] [CrossRef]
- Tan, L.; Lv, X.; Lian, X.; Wang, G. YOLOv4_Drone: UAV image target detection based on an improved YOLOv4 algorithm. Comput. Electr. Eng. 2021, 93, 107261. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Q.; Ren, B. Wind turbine crack inspection using a quadrotor with image motion blur avoided. IEEE Robot. Autom. Lett. 2023, 8, 1069–1076. [Google Scholar] [CrossRef]
- Haq, M.A.; Rahaman, G.; Baral, P.; Ghosh, A. Deep learning based supervised image classification using UAV images for forest areas classification. J. Indian Soc. Remote Sens. 2021, 49, 601–606. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of drone in disaster management: A scoping review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef]
- Zhan, C.; Hu, H.; Sui, X.; Liu, Z.; Wang, J.; Wang, H. Joint resource allocation and 3D aerial trajectory design for video streaming in UAV communication systems. IEEE Trans. Circuits Syst. Video Technol. 2020, 31, 3227–3241. [Google Scholar] [CrossRef]
- Hung, N.V.; Chien, T.D.; Nam, P.N.; Huong, T.T. Flexible HTTP-based Video Adaptive Streaming for good QoE during sudden bandwidth drops. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2023, 10, e3. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Wu, Y.; Tao, Y.; Bian, K.; Zhou, P.; Song, L.; Tuo, H. Improving quality of experience by adaptive video streaming with super-resolution. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1957–1966. [Google Scholar]
- Yuan, Y.; Wang, W.; Wang, Y.; Adhatarao, S.S.; Ren, B.; Zheng, K.; Fu, X. Vsim: Improving qoe fairness for video streaming in mobile environments. In Proceedings of the IEEE INFOCOM 2022—IEEE Conference on Computer Communications, London, UK, 2–5 May 2022; pp. 1309–1318. [Google Scholar]
- Rahman, W.U.; Huh, E.N. Content-aware QoE optimization in MEC-assisted Mobile video streaming. Multimed. Tools Appl. 2023, 82, 42053–42085. [Google Scholar] [CrossRef]
- Ahmed, Z.; Ahmad, A.; Altaf, M.; Khan, F.A. Power efficient UAV placement and resource allocation for adaptive video streaming in wireless networks. Hoc Netw. 2023, 150, 103260. [Google Scholar] [CrossRef]
- Wu, K.; Yang, P.; Cao, X.; Yu, Z. QoE-Driven UAV Video Transmission in a Multi-UAV Network. In Proceedings of the 2023 IEEE/CIC International Conference on Communications in China (ICCC), Dalian, China, 10–12 August 2023; pp. 1–6. [Google Scholar]
- Bera, A.; Misra, S.; Chatterjee, C. QoE analysis in cache-enabled multi-UAV networks. IEEE Trans. Veh. Technol. 2020, 69, 6680–6687. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Hu, Y. Optimal power and bandwidth allocation for multiuser video streaming in UAV relay networks. IEEE Trans. Veh. Technol. 2020, 69, 6644–6655. [Google Scholar] [CrossRef]
- Tang, X.W.; Huang, X.L.; Hu, F. QoE-driven UAV-enabled pseudo-analog wireless video broadcast: A joint optimization of power and trajectory. IEEE Trans. Multimed. 2020, 23, 2398–2412. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Q.; Miao, J.; Yu, F.R.; Fu, F.; Du, J.; Wu, T. Energy-efficient secure video streaming in UAV-enabled wireless networks: A safe-DQN approach. IEEE Trans. Green Commun. Netw. 2021, 5, 1892–1905. [Google Scholar] [CrossRef]
- Zeng, F.; Hu, Z.; Xiao, Z.; Jiang, H.; Zhou, S.; Liu, W.; Liu, D. Resource allocation and trajectory optimization for QoE provisioning in energy-efficient UAV-enabled wireless networks. IEEE Trans. Veh. Technol. 2020, 69, 7634–7647. [Google Scholar] [CrossRef]
- Zhan, C.; Hu, H.; Mao, S.; Wang, J. Energy-efficient trajectory optimization for aerial video surveillance under QoS constraints. In Proceedings of the IEEE INFOCOM 2022—IEEE Conference on Computer Communications, London, UK, 2–5 May 2022; pp. 1559–1568. [Google Scholar]
- Yang, P.; Guo, K.; Xi, X.; Quek, T.Q.; Cao, X.; Liu, C. Fresh, fair and energy-efficient content provision in a private and cache-enabled UAV network. IEEE J. Sel. Top. Signal Process. 2021, 16, 97–112. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, T.; Liu, Y.; Yang, D.; Xiao, L.; Tao, M. Cellular-Connected Multi-UAV MEC Networks: An Online Stochastic Optimization Approach. IEEE Trans. Commun. 2022, 70, 6630–6647. [Google Scholar] [CrossRef]
- Liao, J.; Zhan, C.; Yang, Y.; Zeng, B. QoE Maximization for Multi-Antenna UAV-Enabled Video Streaming. In Proceedings of the GLOBECOM-IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 5559–5564. [Google Scholar]
- Tran, T.T.M.; Vu, B.M.; Shin, O.S. Optimization of Bandwidth Allocation and UAV Placement in Active RIS-Assisted UAV Communication Networks with Wireless Backhaul. Drones 2025, 9, 111. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, J.; Xing, C.; Xie, S.; Luo, X. Self-organization of UAV networks for maximizing minimum throughput of ground users. IEEE Trans. Veh. Technol. 2024, 73, 11743–11755. [Google Scholar] [CrossRef]
- Zhao, C.; Pang, X.; Lu, W.; Chen, Y.; Zhao, N.; Nallanathan, A. Energy efficiency optimization of IRS-assisted UAV networks based on statistical channels. IEEE Wirel. Commun. Lett. 2023, 12, 1419–1423. [Google Scholar] [CrossRef]
- Su, Y.; Pang, X.; Lu, W.; Zhao, N.; Wang, X.; Nallanathan, A. Joint location and beamforming optimization for STAR-RIS aided NOMA-UAV networks. IEEE Trans. Veh. Technol. 2023, 72, 11023–11028. [Google Scholar] [CrossRef]
- Iqbal, Y.; Ahmad, A.; Kaleem, Z. Power-Efficient UAV Placement in Relay Assisted Heterogeneous Public Safety Networks. In Intelligent Unmanned Air Vehicles Communications for Public Safety Networks; Springer: Berlin/Heidelberg, Germany, 2022; pp. 91–103. [Google Scholar]
- Ahmad, A.; Hassan, N.U.; Assaad, M.; Tembine, H. Joint power control and rate adaptation for video streaming in wireless networks with time-varying interference. IEEE Trans. Veh. Technol. 2015, 65, 6315–6329. [Google Scholar] [CrossRef]
- Ali, S.; Ahmad, A.; Iqbal, R.; Saleem, S.; Umer, T. Joint RRH-association, sub-channel assignment and power allocation in multi-tier 5G C-RANs. IEEE Access 2018, 6, 34393–34402. [Google Scholar] [CrossRef]
- Peng, Z.; Liu, R.; Pan, C.; Zhang, Z.; Wang, J. Energy minimization for active RIS-aided UAV-enabled SWIPT systems. IEEE Commun. Lett. 2024. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Ren, B. Energy saving quadrotor control for field inspections. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 52, 1768–1777. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, L. Energy-saving deployment algorithms of UAV swarm for sustainable wireless coverage. IEEE Trans. Veh. Technol. 2020, 69, 10320–10335. [Google Scholar] [CrossRef]
- Mahmood, A.; Vu, T.X.; Chatzinotas, S.; Ottersten, B. Joint optimization of 3D placement and radio resource allocation for per-UAV sum rate maximization. IEEE Trans. Veh. Technol. 2023, 72, 13094–13105. [Google Scholar] [CrossRef]
- Huang, Q.; Wang, W.; Lu, W.; Zhao, N.; Nallanathan, A.; Wang, X. Resource Allocation for Multi-Cluster NOMA-UAV Networks. IEEE Trans. Commun. 2022, 70, 8448–8459. [Google Scholar] [CrossRef]
- Kaleem, Z.; Ahmad, A.; Chughtai, O.; Rodrigues, J.J. Enhanced Max-Min Rate of Users in UAV-Assisted Emergency Networks Using Reinforcement Learning. IEEE Netw. Lett. 2022, 4, 104–107. [Google Scholar] [CrossRef]
- Kaleem, Z.; Yousaf, M.; Qamar, A.; Ahmad, A.; Duong, T.Q.; Choi, W.; Jamalipour, A. UAV-empowered disaster-resilient edge architecture for delay-sensitive communication. IEEE Netw. 2019, 33, 124–132. [Google Scholar] [CrossRef]
- Gong, J.; Zhan, C.; Huang, R.; Xu, C. Throughput and Delay Tradeoff Over 3D UAV Communication Network. In Proceedings of the GLOBECOM-IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 462–467. [Google Scholar]
- Zeng, B.; Zhan, C.; Yang, Y.; Liao, J. Access Delay Minimization for Scalable Videos in Cache-Enabled Multi-UAV Networks. In Proceedings of the GLOBECOM-IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 389–394. [Google Scholar]
- Khan, N.; Ahmad, A.; Alwarafy, A.; Shah, M.A.; Lakas, A.; Azeem, M.M. Efficient Resource Allocation and UAV Deployment in STAR-RIS and UAV-Relay Assisted Public Safety Networks for Video Transmission. IEEE Open J. Commun. Soc. 2025, 6, 1804–1820. [Google Scholar] [CrossRef]
- Guo, Z.; Hu, B.; Chen, S.; Zhang, B.; Wang, L. Joint resource and trajectory optimization for video streaming in UAV-based emergency indoor-outdoor communication. Telecommun. Syst. 2024, 87, 199–211. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, K.; Ning, P.; Ren, Z.; Hu, J.; Wang, J. Improve video QoE by practical bandwidth allocation. Multimed. Syst. 2024, 30, 371. [Google Scholar] [CrossRef]
- Huang, T.; Zhang, R.X.; Wu, C.; Sun, L. Optimizing Adaptive Video Streaming with Human Feedback. In Proceedings of the 31st ACM International Conference on Multimedia, Ottawa, ON, Canada, 29 October–3 November 2023; pp. 1707–1718. [Google Scholar]
- Nakagawa, R.; Ohzahata, S.; Yamamoto, R. Improving Fairness for QoE of Adaptive Video Streaming over ICN. In Proceedings of the 2022 IEEE 11th International Conference on Cloud Networking (CloudNet), Paris, France, 7–10 November 2022; pp. 22–27. [Google Scholar]
- Li, Z.; Zhong, P.; Huang, J.; Gao, F.; Wang, J. Achieving qoe fairness in bitrate allocation of 360 video streaming. IEEE Trans. Multimed. 2023, 26, 1169–1178. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, W.; Wang, Y.; Adhatarao, S.S.; Ren, B.; Zheng, K.; Fu, X. Joint optimization of qoe and fairness for adaptive video streaming in heterogeneous mobile environments. IEEE/ACM Trans. Netw. 2023, 32, 50–64. [Google Scholar] [CrossRef]
- Tanjung, D.; Kim, J.D.; Kim, D.H.; Lee, J.; Kim, S.; Jung, J.Y. Qoe optimization in dash-based multiview video streaming. IEEE Access 2023, 11, 83603–83614. [Google Scholar] [CrossRef]
- Klink, J.; Brachmański, S.; Łuczyński, M. Assessment of the Quality of Video Sequences Performed by Viewers at Home and in the Laboratory. Appl. Sci. 2023, 13, 5025. [Google Scholar] [CrossRef]
- Han, H.; Lv, J. Super-resolution-empowered adaptive medical video streaming in telemedicine systems. Electronics 2022, 11, 2944. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Bui, D.T.; Tran, T.L.; Truong, C.T.; Truong, T.H. Scalable and resilient 360-degree-video adaptive streaming over HTTP/2 against sudden network drops. Comput. Commun. 2024, 216, 1–15. [Google Scholar] [CrossRef]
- Cao, D.; Yang, W.; Chen, H.; Wu, Y.; Tang, X. Energy efficiency maximization for buffer-aided multi-UAV relaying communications. J. Syst. Eng. Electron. 2022, 33, 312–321. [Google Scholar] [CrossRef]
- Ahmed, S.; Chowdhury, M.Z.; Jang, Y.M. Energy-efficient UAV relaying communications to serve ground nodes. IEEE Commun. Lett. 2020, 24, 849–852. [Google Scholar] [CrossRef]
- Veeraswamy Premkumar, G.R.; Van Scoy, B. Optimal Positioning of Unmanned Aerial Vehicle (UAV) Base Stations Using Mixed-Integer Linear Programming. Drones 2025, 9, 44. [Google Scholar] [CrossRef]
- Hu, H.; Zhan, C.; An, J.; Wen, Y. Optimization for HTTP adaptive video streaming in UAV-enabled relaying system. In Proceedings of the ICC—IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Zhan, C.; Huang, R. Energy efficient adaptive video streaming with rotary-wing UAV. IEEE Trans. Veh. Technol. 2020, 69, 8040–8044. [Google Scholar] [CrossRef]
- Zhang, W.; Wen, Y.; Chen, Z.; Khisti, A. QoE-driven cache management for HTTP adaptive bit rate streaming over wireless networks. IEEE Trans. Multimed. 2013, 15, 1431–1445. [Google Scholar] [CrossRef]
- Shen, K.; Yu, W. Fractional programming for communication systems—Part I: Power control and beamforming. IEEE Trans. Signal Process. 2018, 66, 2616–2630. [Google Scholar] [CrossRef]
- Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Hua, M.; Wang, Y.; Wu, Q.; Dai, H.; Huang, Y.; Yang, L. Energy-efficient cooperative secure transmission in multi-UAV-enabled wireless networks. IEEE Trans. Veh. Technol. 2019, 68, 7761–7775. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1; CVX Research: Austin, TX, USA, 2014. [Google Scholar]
- Sarpong, P.K.; Owusu-Hemeng, A.; Ackora-Prah, J. Applications of convex function and concave functions. Dama Int. J. Res. 2018, 3, 1–14. [Google Scholar]
- Fosso-Tande, J. Applications of Taylor Series. 2014. Available online: https://sces.phys.utk.edu/~moreo/mm08/fosso.pdf (accessed on 23 April 2025).
- Luo, Z.Q.; Tseng, P. On the convergence of the coordinate descent method for convex differentiable minimization. J. Optim. Theory Appl. 1992, 72, 7–35. [Google Scholar] [CrossRef]
- Beck, A.; Tetruashvili, L. On the convergence of block coordinate descent type methods. SIAM J. Optim. 2013, 23, 2037–2060. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy efficient UAV communication with energy harvesting. IEEE Trans. Veh. Technol. 2019, 69, 1913–1927. [Google Scholar] [CrossRef]
- Cai, Y.; Wei, Z.; Li, R.; Ng, D.W.K.; Yuan, J. Energy-efficient resource allocation for secure UAV communication systems. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–8. [Google Scholar]
- Zhang, X.; Zhang, J.; Huang, Y.; Wang, W. On the study of fundamental trade-offs between QoE and energy efficiency in wireless networks. Trans. Emerg. Telecommun. Technol. 2013, 24, 259–265. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, Z.; Ahmad, A.; Altaf, M.; Hassan, M.A. Power-Efficient UAV Positioning and Resource Allocation in UAV-Assisted Wireless Networks for Video Streaming with Fairness Consideration. Drones 2025, 9, 356. https://doi.org/10.3390/drones9050356
Ahmed Z, Ahmad A, Altaf M, Hassan MA. Power-Efficient UAV Positioning and Resource Allocation in UAV-Assisted Wireless Networks for Video Streaming with Fairness Consideration. Drones. 2025; 9(5):356. https://doi.org/10.3390/drones9050356
Chicago/Turabian StyleAhmed, Zaheer, Ayaz Ahmad, Muhammad Altaf, and Mohammed Ahmed Hassan. 2025. "Power-Efficient UAV Positioning and Resource Allocation in UAV-Assisted Wireless Networks for Video Streaming with Fairness Consideration" Drones 9, no. 5: 356. https://doi.org/10.3390/drones9050356
APA StyleAhmed, Z., Ahmad, A., Altaf, M., & Hassan, M. A. (2025). Power-Efficient UAV Positioning and Resource Allocation in UAV-Assisted Wireless Networks for Video Streaming with Fairness Consideration. Drones, 9(5), 356. https://doi.org/10.3390/drones9050356