1. Introduction
With the advancement of technology, the industrial revolution, and the development of equipment systems, modern warfare is shifting from mechanization and informatization toward digitalization and intelligentization [
1]. The emergence of new combat forces, represented by UAV equipment, is transforming the nature of warfare from traditional “energy release through material means” and “energy aggregation through networks” to “energy control through intelligence”. The domains of victory are shifting from the “physical domain” and “information domain” to the “cognitive domain”, and the mechanisms of victory are transitioning from “winning through energy” and “winning through information” to “winning through intelligence” [
2,
3,
4]. Given the inherent advantages of UAV equipment, such as high mobility, strong survivability, and intense combat capabilities, there is an increasing demand for more flexible, efficient, personalized, and intelligent maintenance and operational systems for such equipment.
The integration of technologies such as the Internet of Things (IoT), big data, and artificial intelligence (AI) into the field of equipment operation and maintenance (O&M) is profoundly reshaping the mechanisms of equipment support models, organizational structures, operational methods, and decision-making evaluations. This process drives the digital and intelligent transformation of equipment O&M, which has emerged as a key research focus in the current field of UAV equipment operation and maintenance [
5,
6]. Gao L. [
7] explores the significance of embedding intelligent control design into unmanned aerial vehicle (UAV) systems, particularly for mission execution in complex and uncertain environments. Optimization and machine learning techniques serve as transformative tools, with applications in trajectory and path planning, control design in harsh conditions, machine learning integration for adaptive control, fault detection, and predictive maintenance. Al-Haddad L.A. et al. [
8] present a protocol for UAV fault diagnosis using signal processing and machine learning, encompassing vibration data collection, preprocessing, feature extraction, and application of machine learning models. This work provides a technical approach for UAV fault detection and maintenance. Shen F Y et al. [
9] explore autonomous predictive maintenance for quadrotor UAVs under multi-actuator degradation, leveraging intelligent algorithms for real-time health state monitoring and prediction. This study presents a proactive technical approach for intelligent maintenance of UAV equipment. Zhu W.J. et al. [
10] propose a one-stop maintenance strategy for UAV swarms executing consecutive missions in a short timeframe, incorporating emergency repair actions such as rapid disassembly, repair, and reassembly. This work optimizes to maximize the number of UAVs repaired within a specified time frame, ensuring mission continuity for consecutive UAV operations. Against this backdrop, it is imperative to construct an intelligent equipment maintenance and operations system around a comprehensive chain encompassing four critical stages: perception, analysis, decision-making, and implementation. Only by developing and integrating the corresponding facilities and foundational conditions from five key dimensions—network, data, algorithms, methods, and platforms—can the true realization of “data empowerment, intelligent decision-making, and autonomous operations” in equipment maintenance be achieved. Specifically, for UAV equipment maintenance, it is essential to integrate intelligent algorithms into the specific tools, platforms, and operational methods used in the perception, decision-making, and implementation stages. This integration is crucial to effectively implement intelligent maintenance for UAV equipment and translate it into practical actionable outcomes.
Since the concept of MAS was proposed in the 1970s, it has garnered considerable attention and research from scholars both domestically and internationally. As an important branch of automatic control and artificial intelligence, MAS has been widely applied in aerospace, military, industrial, and daily life domains [
11]. Multi-agents are extensively used in human production and life, including UAV swarms [
12], collaborative robots [
13], artificial satellites [
14], industrial robotic arms [
15], autonomous vehicles [
16], underwater vehicles [
17], and high-speed aircraft [
18]. In the implementation of MAS, multi-layered and diversified agents can be constructed using an object-oriented approach, with relevant intelligent algorithm models embedded within, which not only reduces system complexity but also enhances the ability of each agent to solve complex problems [
19]. Simultaneously, agents collaborate through standard interfaces to address large-scale, complex, and interconnected issues, facilitating the management and scalability of complex systems. Therefore, by integrating multi-agent technology with various terminals in frontline operations for unmanned aerial vehicle (UAV) equipment maintenance, intelligent agent operations, and command decision-making under distributed management can be achieved, thereby providing a solution for the intelligent transformation and upgrade of UAV equipment maintenance.
With the rapid advancement of big data technology and artificial intelligence algorithms, various intelligent operation and maintenance (O&M) methods and tools have been increasingly applied to the frontline of unmanned aerial vehicle (UAV) equipment maintenance, yielding positive results. However, from an overall perspective, the current intelligent O&M efforts in the field of UAV equipment maintenance still lack systematic integration and deep alignment with combat training missions. In particular, there is a lack of a systematic methodology for the application of artificial intelligence technologies, as well as a relatively complete equipment system for effective validation.
To address the current issues of low intelligentization level and insufficient systematic construction in UAV equipment operation and maintenance (O&M), this paper proposes a UAV equipment O&M system constructed based on multi-agent technology and verifies its feasibility and effectiveness through simulation. The main contributions of this paper include the following aspects:
By analyzing the characteristics and requirements of intelligent operation and maintenance (O&M) tasks for UAV equipment during the application, the DoDAF methodology [
20] is employed to hierarchically decompose UAV equipment O&M tasks, resulting in a refined equipment O&M capability index system encompassing three core capabilities: Intelligent Situation Awareness Capability, Intelligent Decision Support Capability, and Intelligent Task Execution Capability;
Starting from the realization of requirements, the paper deeply integrates agent technology with equipment O&M operations, analyzes the operational logic of the agent-based UAV equipment O&M system, and designs an integrated “cloud-edge-end” architecture for the intelligent UAV equipment O&M system based on this analysis;
By combining typical UAV equipment maintenance and O&M tasks, a multi-attribute decision-making algorithm for UAV equipment maintenance is designed to verify the feasibility and accuracy of the UAV equipment O&M system. Additionally, targeted directions for the future development and evolution of the system are proposed.
The remainder of this paper is organized as follows:
Section 2 analyzes the requirements for intelligent operation and maintenance (O&M) capabilities of UAV equipment.
Section 3 constructs an agent-based UAV equipment O&M system.
Section 4 presents a maintenance case study, designs a multi-attribute decision-making algorithm for UAV equipment maintenance, and validates the feasibility and superiority of the proposed system within this case. Finally,
Section 5 concludes the paper.
2. Analysis of Intelligent Operation and Maintenance Capability Requirements for UAV Equipment
Equipment maintenance tasks are derived from operational missions, and under the conditions of intelligent warfare, the maintenance process must seamlessly integrate with and efficiently support intelligent operational tasks. This requires an in-depth analysis of the characteristics of maintenance tasks in an intelligent warfare environment. Distinct from traditional mechanized maintenance models, intelligent maintenance follows a workflow of “intelligent situational awareness—intelligent planning—precise action control—efficient human-machine collaboration” [
21]. The effective implementation of this new maintenance model heavily relies on the support of an intelligent equipment maintenance system.
The DoDAF (Department of Defense Architecture Framework), evolved from the C4ISR Architecture Framework in 2004, is a standardized structural framework and descriptive language developed by the U.S. Department of Defense to guide the development and requirements analysis of complex information systems. Based on an analysis of the characteristics and requirements of intelligent maintenance tasks, this study utilizes the Department of Defense Architecture Framework (DoDAF) to decompose UAV equipment maintenance tasks hierarchically, resulting in refined maintenance capability indicators. Since the core focus of this paper is on the generation of an intelligent maintenance capability system, certain operational, system, and service views in DoDAF can be omitted. Instead, by integrating known information and constructing high-level operational concept views (OV-1) and operational activity model views (OV-5b), the task requirements and core elements of the maintenance system are established [
22]. On this basis, a classification view of key intelligent maintenance capabilities (CV-2) for UAV systems is refined and clarified.
2.1. Conceptual View of Intelligent Operation and Maintenance for UAV Equipment
Based on the U.S. Air Force’s Agile Combat Employment (ACE) practices [
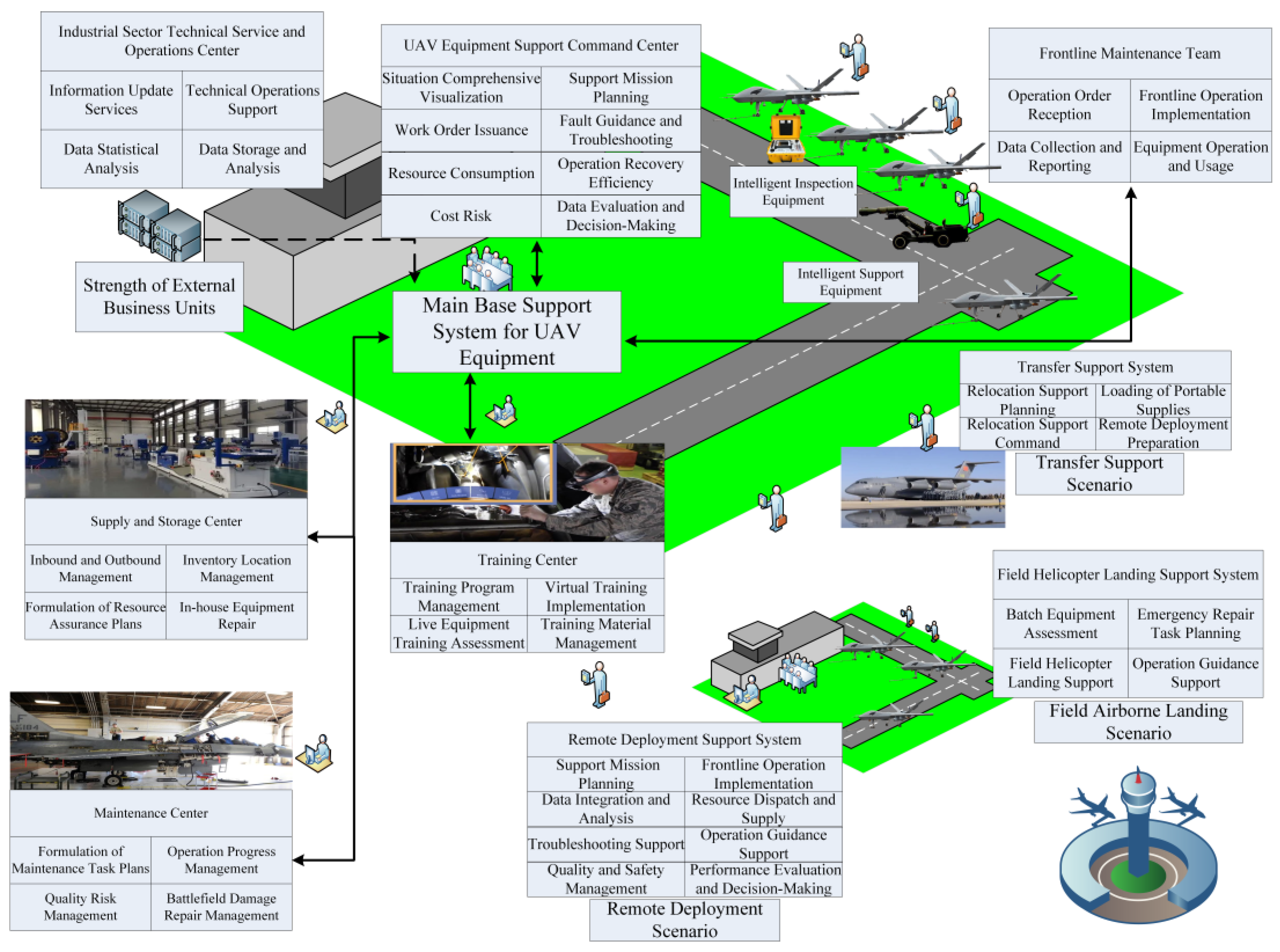
23] and the operational requirements of current UAV equipment, the intelligent support system for UAVs encompasses four typical application scenarios—main base support, remote deployment support, base storage support, and field landing support—involving four categories of tasks: operational support, maintenance support, supply support, and training support. To conduct a detailed analysis of maintenance activities, this paper selects main base support as the primary scenario while considering other operational contexts, presenting the Maintenance Support Scenario View OV-1 in
Figure 1.
Taking UAV operation and maintenance at the main base as an example, the intelligent UAV equipment operation and maintenance system should be a brand-new and advanced UAV maintenance framework. Driven by combat and training missions with UAV equipment as its core, under the command and decision-making of the “One Platform, Three Centers” (Command Platform, Maintenance Center, Supply and Storage Center, Training Center) in the UAV equipment support system, it relies on internal maintenance resources and external business department support. By applying intelligent technologies and advanced equipment, this system achieves high efficiency, precision, and intelligence in UAV equipment operation and maintenance.
The main base maintenance scenario involves the largest number of personnel and the most comprehensive equipment, resulting in the most complex and diverse operational logic. In contrast, other maintenance scenarios can rely on remote resources for repair support, correspondingly reducing cyclical maintenance requirements. For instance, UAV deployment maintenance and remote site operations significantly reduce equipment and personnel demands compared to main base operations while streamlining command and management functions. For field landing maintenance, repair teams must conduct battlefield repairs based on battle damage assessments of UAVs. As shown in
Figure 1, these scenarios enable the analysis of personnel-specific maintenance activities across different operational contexts.
2.2. Overview of Intelligent Operation and Maintenance Activities for UAV Equipment
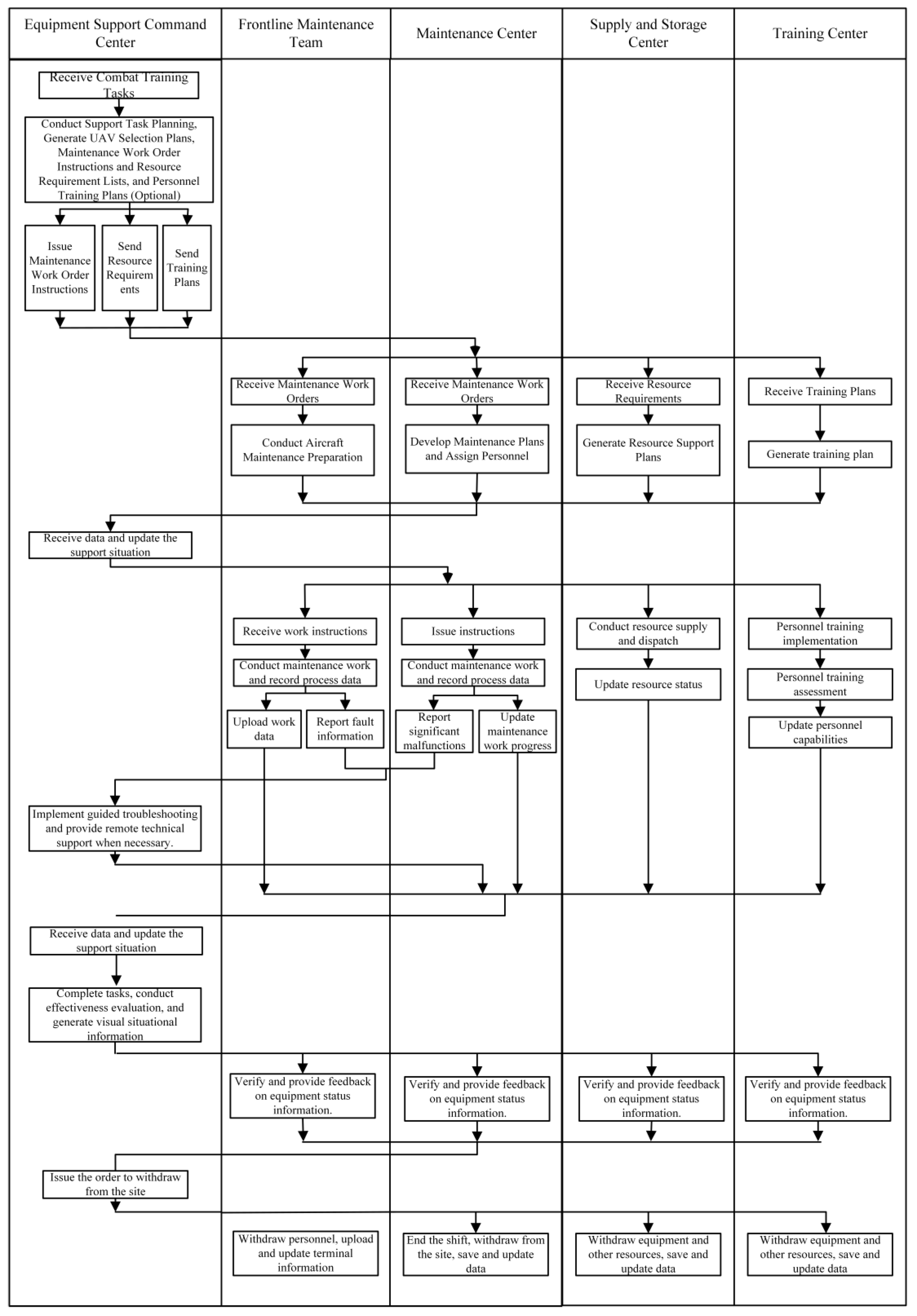
The Operation and Maintenance Activity View (OV-5b) represents the typical task flows of various O&M activities [
24]. Based on the analysis of logical and associative relationships among specific activities of involved participants, this view visually depicts information such as activity execution entities and resource transfer processes. The operation and maintenance activity model for UAV equipment is presented in
Figure 2.
As shown in
Figure 2, the OV-5b model decomposes intelligent O&M activities into four core processes: support mission reception, resource allocation, task execution, and status feedback. These activities directly address the functional requirements of the intelligent O&M system.
Support Mission Reception: The UAV equipment support center aggregates real-time battlefield environmental information and equipment status data through multi-source data interfaces. By applying big data analytics to mine data correlations, it generates intelligent support plans that specify task priorities, resource requirements, and collaborative instructions;
Resource Dynamic Scheduling: Upon receiving work orders, the maintenance center uses intelligent algorithms to match maintenance teams with equipment and optimize dispatch routes. Meanwhile, the supply center generates supply plans based on operational requirements and historical consumption data, activating an intelligent logistics system to ensure precise material delivery;
Intelligent Task Execution: Upon arrival at the site, maintenance teams use inspection robots for secondary fault verification while AR glasses provide real-time repair guidance. Collaborative robots perform high-precision disassembly/assembly operations, supported by synchronized material supply from the supply center;
Status Closed-Loop Feedback: After maintenance completion, the support center verifies UAV performance parameters through a digital twin verification platform, generates maintenance reports, and updates resource pool status. Training centers optimize training scenarios based on maintenance data to enhance personnel skill levels.
2.3. Classification View of UAV Equipment Operation and Maintenance Capabilities
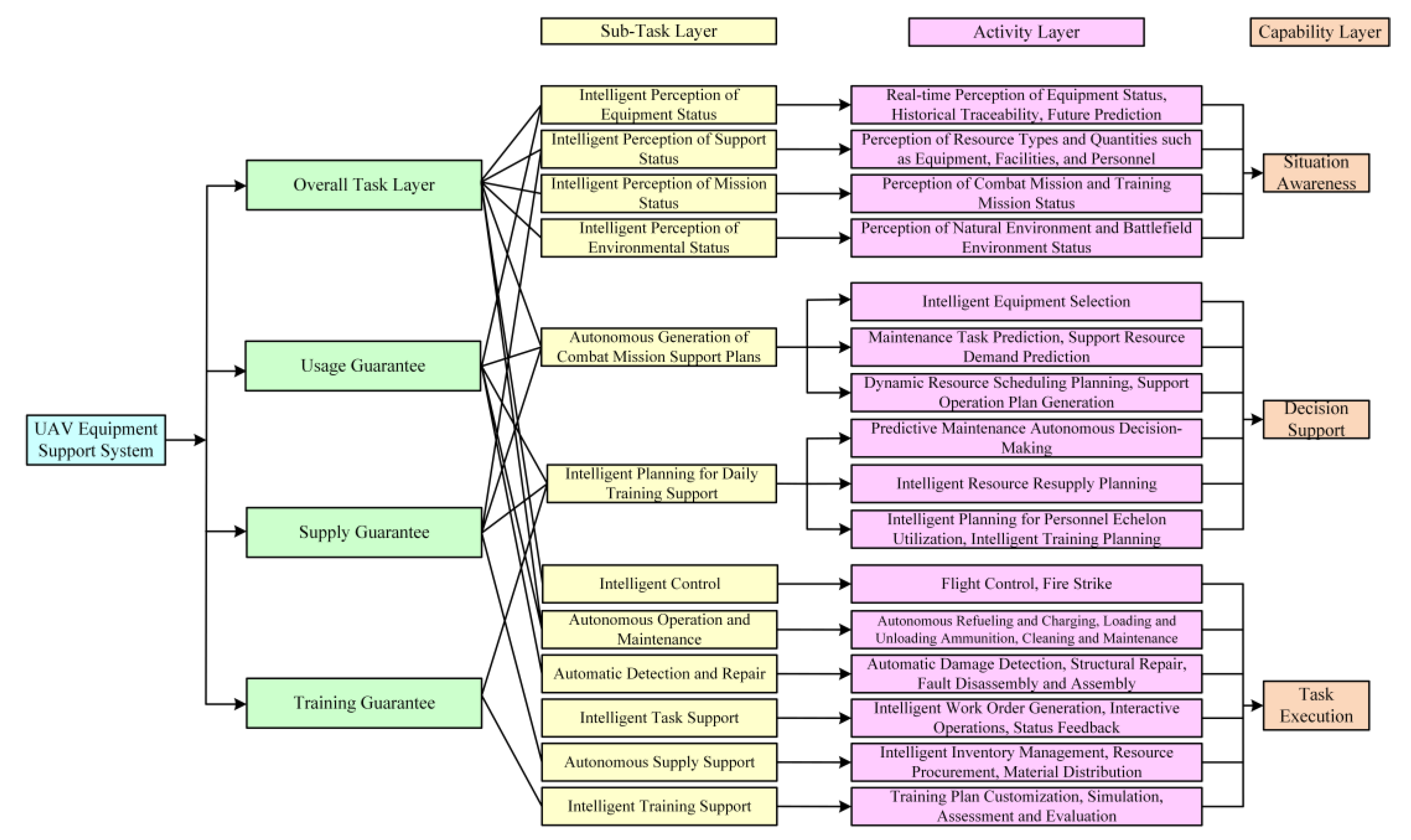
The establishment of an intelligent operation and maintenance capability framework for UAVs serves as the cornerstone for realizing intelligent operation and maintenance. Based on the operational concept view and application scenario analysis of the UAV equipment operation and maintenance system, the overall task of intelligent operation and maintenance is broken down into various sub-tasks, resulting in the cross-linking relationship among “tasks, activities, and capabilities”. The Classification View of Intelligent Operation and Maintenance Capabilities for UAV Equipment (CV-2) is shown in
Figure 3.
Intelligent Situation Awareness Capability: In the context of intelligent warfare, technology-driven and information-dominant characteristics have become mainstream features of the warfare landscape. To ensure the precision and efficiency of UAV equipment operation and maintenance, the primary task is to obtain real-time and accurate information about the comprehensive operation and maintenance situation, including UAV equipment status, operation and maintenance task requirements, deployment of operation and maintenance resources, and material reserve status. By deeply integrating sensor technology, Prognostic and Health Management (PHM) systems, total asset visibility technology, and big data analytics, the system can rapidly process massive amounts of battlefield data, achieving instant situational awareness and precise prediction of future trends in operation and maintenance. This intelligent “eye” for situation awareness ensures that UAV equipment operation and maintenance activities are closely aligned with battlefield dynamics, providing a solid and timely information foundation for command and decision-making;
Intelligent Decision Support Capability: Intelligent decision support forms the core hub of intelligent operation and maintenance for UAV equipment. This functional module leverages the rich data resources collected by intelligent situation awareness and utilizes artificial intelligence technologies such as machine learning and deep learning. It automatically generates a series of decision-making suggestions tailored to actual battlefield needs and current operation and maintenance capabilities, including equipment selection plans, maintenance support demand forecasts, and operation and maintenance task planning. Through simulation evaluation and optimization algorithms, the optimal decision-making plan is selected. Additionally, this capability module can closely track real-time changes in the battlefield situation and flexibly adjust operation and maintenance plans to cope with complex and dynamic battlefield environments. This intelligent decision-making “brain” significantly enhances the precision and response speed of support operations, providing powerful intellectual support for the efficient operation and maintenance of UAV equipment;
Intelligent Task Execution Capability: Embracing the advanced concept of “machines replacing human labor”, the deep application and integration of intelligent technologies have significantly improved operation and maintenance efficiency. This capability is fully integrated into various task links such as usage, maintenance, supply, and training within operation and maintenance missions, establishing an efficient and collaborative intelligent task execution system. For example, by integrating cutting-edge technologies such as artificial intelligence, digital twins, cloud computing, robotics, the Internet of Things, as well as virtual reality (VR) and augmented reality (AR), a series of complex task processes can be automatically completed, including charging and mounting of UAV equipment, inspection and maintenance, fault diagnosis and intelligent repair, automated material handling, and simulated combat training for personnel. This intelligent task “toolbox” not only greatly improves task efficiency and accuracy but also provides solid technical support for the intelligent upgrade of UAV equipment operation and maintenance work.
3. Construction of an Agent-Based Intelligent Operation and Maintenance System for UAV Equipment
After defining the intelligent support capability system, the key lies in transforming it into a practical and implementable architecture. The digital and intelligent support system for UAV equipment is constructed on a foundation of diverse functional units. In traditional models, these functional units primarily rely on manual decision-making, manual operations, and mechanical equipment, resulting in limited levels of intelligence. However, in a digital and intelligent system, various functional units are endowed with agent forms. Through the introduction of agent technology, capabilities such as operation and maintenance planning perception, intelligent decision-making, intelligent memory, and intelligent execution can be derived for UAV equipment. Based on operation and maintenance task instructions, the UAV equipment intelligent operation and maintenance model, operation and maintenance databases, knowledge bases, and existing AI models from various disciplines can be comprehensively applied to enhance the intelligence level of infrastructure maintenance. Through interface services, model encapsulation, and other forms, AI services are provided to various disciplines of infrastructure maintenance, supporting the construction of AI application scenarios such as equipment inspection and repair, equipment information management, equipment status monitoring, fault and emergency handling, and intelligent operation and maintenance decision-making. This not only achieves seamless integration of support capabilities from the macro architecture to the operational level but also improves the timeliness and accuracy of UAV equipment support through the rapid response and efficient analysis capabilities of intelligent units.
3.1. Classification of Agent Types
The Artificial Intelligence Agent is based on large natural language models and derives core control capabilities, planning abilities, memory functions, and interaction capabilities with other tools. This enables the Agent to possess a certain degree of autonomy and initiative, simulating human thinking patterns and behavioral models, making it a highly integrated intelligent entity. It primarily consists of the Profile module, Memory module, Planning module, and Action module. The Profile module defines and manages the characteristics and behaviors of the role. The Memory module stores and organizes information obtained from the environment. The Planning module involves the process of planning and decision-making when receiving task instructions or facing problems. The Planning module can flexibly adjust its behavioral strategies based on actual conditions to achieve more efficient and reliable task execution. The Action module is responsible for translating the Agent’s decisions into specific actions, enabling the Agent to interact effectively with its surroundings and adjust its behavior based on perceived feedback. When designing the Action module, to enhance the development efficiency of the UAV operation and maintenance system, agents can be classified based on their functional differences in maintenance tasks. By predefining the basic attributes of various types of agents, the use of inheritance and overloading programming techniques can effectively reduce the development workload.
Based on the Belief–Desire–Intention model in agent theory, agents are categorized into three types: reactive, cognitive, and hybrid [
25].
Reactive Agents: In the intelligent agent framework of the UAV equipment operation and maintenance system, embedded agents such as handheld intelligent flaw detection devices, AR glasses, intelligent maintenance tools, appearance inspection robots, maintenance operation machines, energy refueling vehicles, intelligent bomb-loading vehicles, material inventory robots, and intelligent transport vehicles are designed as reactive agents. This design is based on the fact that their behaviors primarily respond to changes in the external environment, and they do not incorporate complex logical reasoning mechanisms internally;
Cognitive Agents: In contrast, the embedded agents responsible for command decision management, maintenance planning management, inventory scheduling management, and virtual training management are required to comprehensively consider multiple constraints and optimize the allocation and distribution of complex resources. The collaborative relationships among these systems are intricate, demanding advanced decision-making and problem-solving capabilities. Consequently, they are constructed as cognitive agents;
Hybrid Agents: Regarding the agents embedded within the UAV itself, as a complex system composed of numerous precision components, they not only need to perceive environmental states in real time but also require complex flight control and intelligent decision-making capabilities. Therefore, they are constructed as hybrid agents.
3.2. Operational Logic of the Agent-Based Intelligent Operation and Maintenance System for UAV Equipment
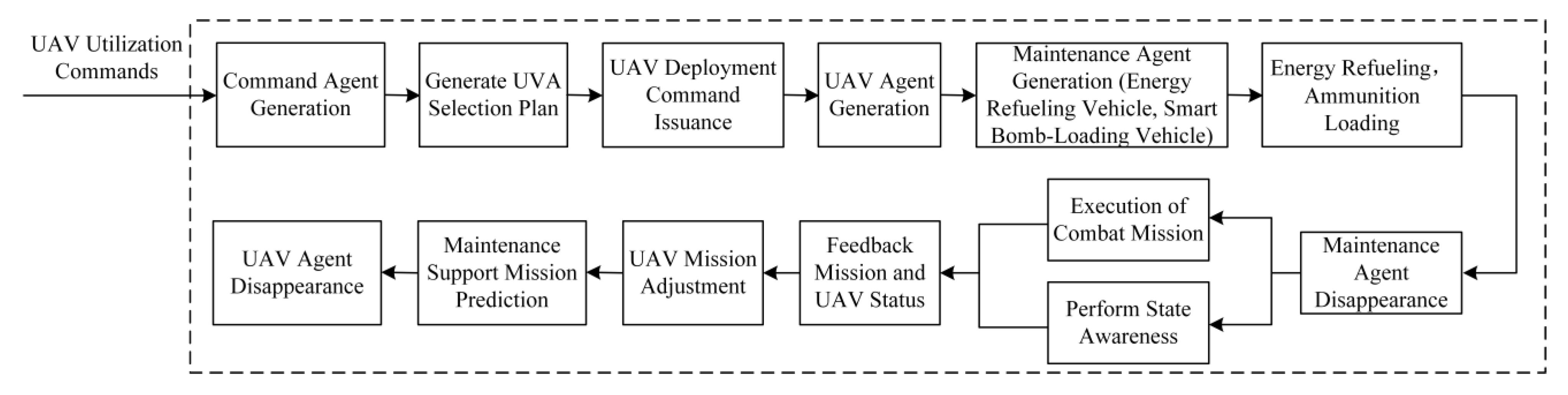
During the actual operation of the maintenance system, each agent operates autonomously and collaborates with others based on task instructions and predefined rules. When a task instruction is received, the system initiates the corresponding maintenance process, providing comprehensive and high-efficiency operation and maintenance for the task. The schematic diagram of the maintenance process during UAV usage is shown in
Figure 4.
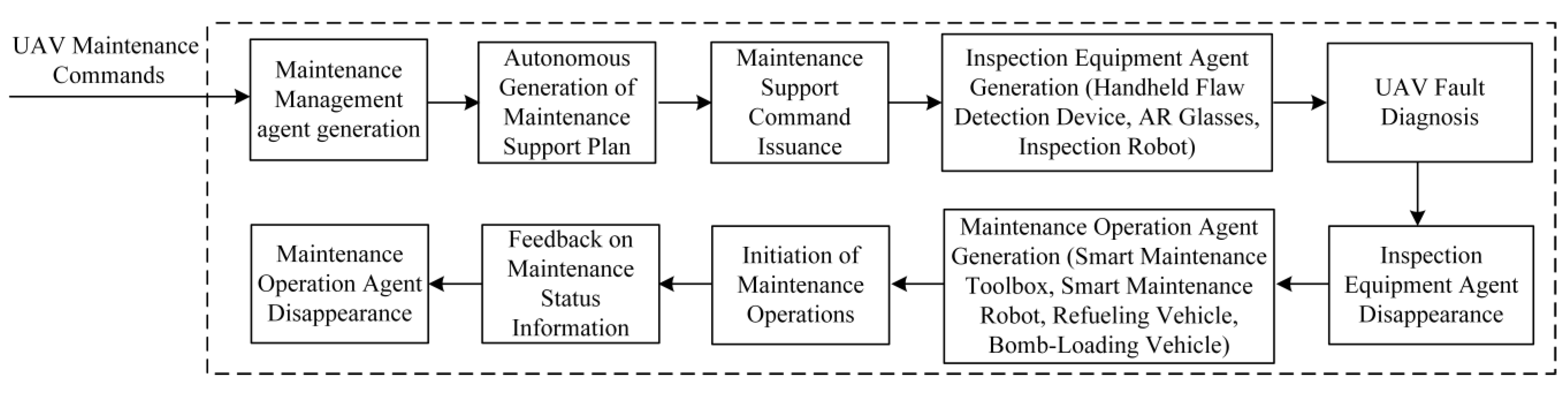
The process flow of the intelligent operation and maintenance system during UAV equipment maintenance is illustrated in
Figure 5. Driven by the maintenance task instructions, the Maintenance Planning and Management Agent is activated and is responsible for generating maintenance plans and issuing commands. Subsequently, inspection equipment Agents such as intelligent flaw detection devices, Augmented Reality (AR) glasses, and multimodal defect detection robots are created to perform equipment fault detection tasks. Upon completion of the inspection, the relevant Agents are automatically deactivated. Following this, maintenance operation Agents, including the intelligent maintenance toolbox, maintenance robots, refueling vehicles, and ammunition loading vehicles, are generated to execute maintenance tasks and provide real-time feedback on the maintenance status. Once the maintenance tasks are completed, the relevant Agents are automatically deactivated, and the Maintenance Planning and Management Agent adjusts the maintenance plan based on the feedback received.
The schematic diagram of the support system workflow in maintenance support tasks is illustrated in
Figure 5. Driven by the maintenance support task instructions, the Maintenance Planning Management Agent is activated, responsible for generating a maintenance support plan and issuing commands. Subsequently, inspection equipment Agents, such as intelligent flaw detection devices, AR glasses, and multimodal defect detection robots, are created to perform equipment fault detection tasks. Upon completion of the inspection, the relevant Agents are automatically deactivated. Following this, maintenance operation Agents, including intelligent maintenance toolkits, maintenance robots, refueling vehicles, and ammunition-loading vehicles, are generated to execute the maintenance tasks and provide real-time feedback on the maintenance status. Once the maintenance tasks are completed, the relevant Agents are automatically deactivated, and the Maintenance Planning Management Agent adjusts the maintenance plan based on the feedback received.
The process flow of the intelligent operation and maintenance system during UAV equipment material supply is illustrated in
Figure 6. Driven by the material supply task instructions, the Inventory Scheduling Management Agent is activated, responsible for generating material supply plans and issuing commands. Subsequently, material support equipment Agents such as inventory robots and intelligent transport vehicles are created to carry out material supply activities and provide real-time feedback on the status of resource supply. Upon completion of the supply tasks, the supply equipment Agents are automatically deactivated, while the Inventory Scheduling Management Agent continuously optimizes the material supply plan based on the feedback received.
The process flow of the intelligent operation and maintenance system during UAV operator training is illustrated in
Figure 7. Upon receiving the training task instructions, the Virtual Training Management Agent is activated, responsible for generating training plans and issuing commands. Subsequently, training simulation Agents such as environment simulators and operation simulators are created to conduct subject training and assessment evaluations, providing real-time feedback on the training status. Upon completion of the training tasks, the training simulation Agents are automatically deactivated, while the Virtual Training Management Agent continuously optimizes the training plan based on the feedback received, ensuring the effectiveness of the training.
3.3. Architecture of Intelligent Operation and Maintenance System for UAV Equipment
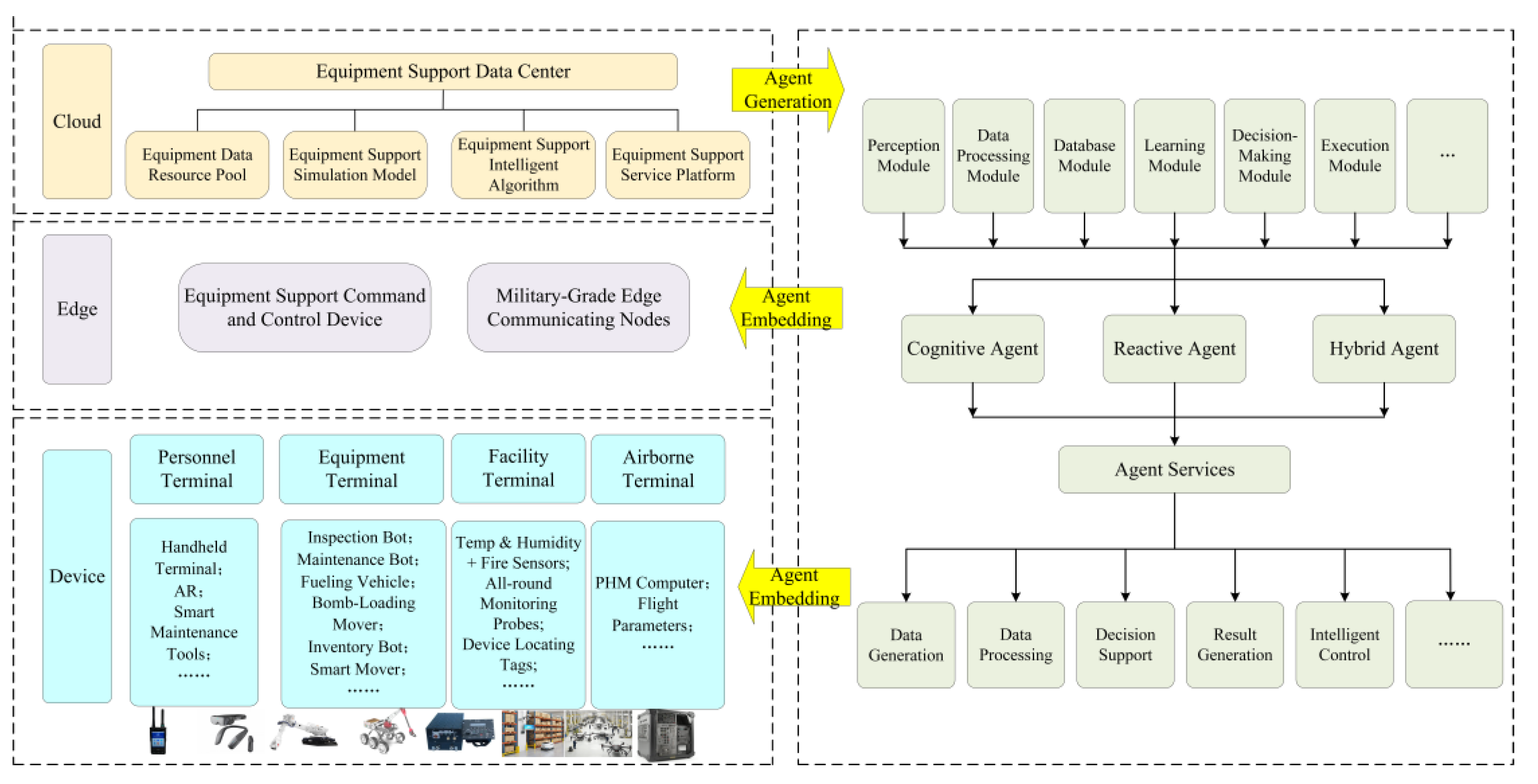
After determining the operational logic and classification of the agents, the next step is to construct a comprehensive and efficient intelligent operation and maintenance system for UAV equipment, with the agents as the core. To clearly reflect the hierarchical structure of the system, illustrate the data processing flow, and adapt to the demands of the digital and intelligent era, the agent-based intelligent operation and maintenance system for UAV equipment adopts a “cloud-edge-end” distributed architecture. As shown in
Figure 8, this architecture is not only open and flexible, supporting plug-and-play functionality, but also fully leverages the respective advantages of cloud computing, edge computing, and end devices.
In the system, the “Cloud” primarily refers to the UAV equipment operation and maintenance data center deployed at higher-level authorities or rear bases. By leveraging abundant data storage resources and powerful computing capabilities, the center constructs service platforms and digital models are tailored for various levels of UAV equipment operation and maintenance businesses. It develops intelligent agents for different levels and tasks within the UAV equipment operation and maintenance domain, providing embeddable agent services for decision-making and operation implementation at all levels.
The “Edge” primarily consists of military-grade edge communication nodes (e.g., tactical communication gateways, secure satellite terminals, and mobile server clusters) deployed at UAV operation and maintenance sites. These cloudlet-based devices are managed and operated by military authorities, ensuring high reliability and security while providing localized data processing and decision-making capabilities for UAV maintenance operations. Based on reliable interconnection with the “cloud” and “edge” and utilizing their own storage and computing capabilities, these devices periodically download and update agent services from the “cloud” center. They meet the decision-making, operation monitoring, quality assessment, and information collection needs at the front line of UAV equipment operation and maintenance and provide data review, processing, and reporting services for front-line operation and maintenance tasks.
The “Device” primarily refers to various terminal devices deployed and used at the front line of UAV equipment operation and maintenance, including personnel terminals, vehicle terminals, and equipment terminals. Unlike traditional mechanical support terminal devices, various terminal devices in the “end” are embedded with agent services, endowing them with intelligent capabilities to autonomously complete complex UAV equipment operation and maintenance tasks. Although there are differences in form and function among various terminals, they can all achieve interconnection and interoperability through the IoT covering the UAV equipment operation and maintenance site, supporting core functions such as operation and maintenance command and dispatch, instruction issuance, data collection, information reporting, and maintenance and repair.
4. Simulation Verification
As the intelligent operation and maintenance system for UAV equipment involves multiple scenarios and tasks, with the core task being the maintenance of UAV equipment, this paper focuses on illustrating the feasibility and superiority of the agent-based intelligent operation and maintenance system for UAV equipment through an example simulation of intelligent maintenance tasks for UAV equipment. Since the intelligent operation and maintenance system itself relies on various intelligent devices and technological means, its maintenance efficiency is significantly superior to traditional manual maintenance support systems. To more comprehensively demonstrate the performance advantages of the UAV intelligent operation and maintenance system, this study emphasizes the verification of the efficiency improvements brought about by the multi-agent-based intelligent operation and maintenance mode for UAV equipment through intelligent decision-making and the integration of intelligent device skills.
4.1. Intelligent Maintenance Decision-Making Algorithm for UAV Equipment Based on Multi-Attribute Evaluation
In the traditional equipment operation and maintenance mode, maintenance decisions primarily rely on the experience and subjective judgment of maintenance personnel, lacking scientific data support. This often leads to unreasonable resource allocation, low maintenance efficiency, and even situations of over-maintenance or under-maintenance. This mode is difficult to adapt to the requirements of modern warfare for high efficiency and precision in equipment operation and maintenance.
However, in the intelligent operation and maintenance mode, maintenance tasks can be handled by intelligent agents, and a maintenance decision-making model can be established. Through intelligent optimization algorithms such as particle swarm optimization, bee colony optimization, genetic algorithms, and simulated annealing algorithms, the optimal decision-making scheme can be obtained. This not only ensures the continuity of combat missions and enhances overall combat effectiveness but also effectively reduces combat costs and significantly improves maintenance efficiency.
4.1.1. Establishment of Multi-Attribute Decision-Making Indicators
The multi-attribute decision-making method utilizes target attributes, decision matrices, and certain tactical experience and principles to provide the necessary decision-making data. It is a decision-making approach that analyzes target attributes and evaluates solution information [
26]. Target attributes can be qualitative or quantitative and precise or fuzzy, thereby quantifying the importance of UAV maintenance. In the decision-making process for combat UAV maintenance support, the assessment of the importance of UAVs awaiting maintenance involves multiple critical attributes, which collectively determine the maintenance priority and resource allocation strategy. Similar to the threat assessment of aerial swarm targets, the maintenance decision-making for combat UAVs also requires a comprehensive consideration of multi-dimensional attributes, which are interrelated and complex to analyze. In practical applications, when addressing multi-attribute decision-making problems, the influencing factors are typically categorized into six types: UAV combat capability
, mission urgency
, maintenance time
, maintenance cost
, damage severity
, and UAV type
.
Define the solution set: Assume there are n UAVs awaiting maintenance. The solution set is denoted as , where , represents the i-th UAV.
Constructing the Decision Matrix: For each alternative
, its attribute value on
attribute is
. The decision matrix
Y can be represented as follows:
where
m = 6 is the number of attributes.
Membership Function Design
- (1)
Membership Function for Combat Capability
The stronger the combat capability, the higher the degree of importance. Combat capability is typically a continuous variable, and a linear membership function can be employed to reflect its linear relationship with the degree of importance.
where
and
denote the minimum and maximum values of combat capability, respectively. For instance, if the range of combat capability is from 0 to 100, then when
,
, signifying the strongest combat capability and the highest degree of importance; conversely, when
,
, indicating the weakest combat capability and the lowest degree of importance.
- (2)
Membership Function for Mission Urgency
The higher the mission urgency, the greater the degree of importance. Mission urgency is typically a nonlinear variable, and as urgency increases, the growth in importance may accelerate. Therefore, an exponential membership function can be adopted to reflect this nonlinear relationship.
where
is the adjustment parameter, which can be tailored according to practical circumstances. For instance, when
= 2, as urgency increases from 0 to 1, the membership degree rapidly rises from 0 to nearly 1, illustrating the nonlinear impact of urgency on the degree of importance.
- (3)
Membership Function for Maintenance Time
The shorter the maintenance time, the higher the degree of importance. The influence of maintenance time on the degree of importance is typically nonlinear; that is, when the maintenance time is very short, the increase in importance is particularly pronounced, whereas when the maintenance time is long, the decline in importance tends to level off. Therefore, a decreasing half-normal distribution can be employed to reflect this nonlinear relationship.
where
is the adjustment parameter, and
is the minimum value of maintenance time. For example, when
= 0.1 and
, when the maintenance time is 0 days,
, indicating the highest degree of importance. As the maintenance time increases, the membership degree gradually decreases, but the rate of decline slows down over time.
- (4)
Membership Function for Maintenance Cost
The lower the maintenance cost, the higher the degree of importance. Maintenance cost is typically a continuous variable, and a linear membership function can be utilized to reflect its linear relationship with the degree of importance.
where
and
represent the minimum and maximum values of maintenance cost, respectively. For instance, if the range of maintenance cost is from 0 to 1 million CNY, when
,
, indicating the lowest maintenance cost and the highest degree of importance; conversely, when
,
, signifying the highest maintenance cost and the lowest degree of importance.
- (5)
Membership Function for Damage Level
The severity of damage to the UAV increases in importance within a certain range, necessitating prioritized repairs. However, when the damage exceeds a certain threshold, its importance diminishes, and it may even lose its repair value. This nonlinear relationship between the degree of damage and its importance can be represented using a piecewise nonlinear membership function.
the damage assessment score ranges from 0 to 100 points:
Minor damage (0–30 points): The extent of damage is low, with lower importance, and repairs can be postponed.
Moderate damage (30–70 points): The extent of damage is moderate, with higher importance, and repairs should be prioritized.
Severe damage (70–90 points): The extent of damage is high, with the highest importance, and urgent repairs are required.
Beyond repair (90–100 points): The extent of damage is excessive, with decreased importance, and may no longer hold repair value.
- (6)
Membership Function for UAV Type
Different types of UAVs play distinct roles in combat missions, and their importance varies accordingly. The type of UAV is a discrete variable, and a discrete membership function can be employed to reflect the importance levels of different UAV types.
- 4.
Calculation of Membership Degree Values
Based on the aforementioned membership functions, calculate the membership degree values for each alternative under each attribute to obtain the membership degree matrix
M.
- 5.
Determination of Weights
The weights of each attribute for the UAVs awaiting maintenance provide essential information for decision analysis, reflecting the relative importance of each attribute and significantly influencing the decision outcome. The weight vector composed of the weights of each attribute is denoted as
and it satisfies
. Typically, the Analytic Hierarchy Process (AHP) [
27] is used to determine the weights in decision-making problems. However, due to the extensive computational requirements of AHP, the Ratio Scaling Method [
28] can be employed as an alternative to determine the weights. The Ratio Scaling Method provides decision-makers with the importance ratios between pairwise factors in a sequential forward manner. Specifically, it gives the importance ratios
between
to
,
to
,…, and
to
. Finally, by setting the weight
of the
n-th factor to 1, the weight vector
can be calculated using the following formula:
where
represents the weight value in the
i-th row and
k-th column of the weight vector;
denotes the importance ratio between two adjacent factors; and
represents the new weight value obtained through the Ratio Scaling Method.
The Ratio Scaling Method reduces the dimensionality of subjective judgments by establishing pairwise importance ratios between adjacent attributes (e.g., , ). This chain-based comparison minimizes decision complexity while retaining expert knowledge. For example, a higher weight for mission urgency () indicates that timeliness is critical in combat scenarios, necessitating priority allocation of rapid response resources.
Lastly, based on expert evaluations and historical data, the importance ratios of adjacent attributes are determined as follows: the importance ratio of UAV combat capability
to mission urgency
is 1; the importance ratio of mission urgency
to maintenance time
is 1.8; the importance ratio of maintenance time
to maintenance cost
is 1.5; the importance ratio of maintenance cost
to UAV type
is 1.2; and the importance ratio of UAV type
to damage level
is 1.5. Using the chain comparison scoring method, the weights of each attribute are calculated as follows:
- 6.
Weighted Normalized Decision Matrix
By combining the membership degree matrix M with the weight vector W, the weighted normalized decision matrix
V is obtained as follows:
- 7.
Calculation of Ideal and Negative-Ideal Solutions
Typically, decision-making results are obtained using membership functions and a ranking method that approximates the ideal solution to rank the “ideal solution” and “negative-ideal solution” in the target decision-making problem. The so-called ideal solution is a conceived optimal solution, while the negative-ideal solution is a conceived worst-case solution. Finally, the importance levels of the drones in need of repair are ranked using membership functions and the ranking method that approximates the ideal solution.
Definition of the Ideal Solution
and the Negative-Ideal Solution
- 8.
Calculate the Relative Closeness
Calculate the distance of each solution
to the ideal solution
and the negative ideal solution
, denoted as
and
, as follows:
Then, calculate the relative closeness
of each solution.
It is evident that 0 ≤ ≤ 1. If and are closer, then approaches 1. The value of relative closeness can be used as a measure of importance, allowing for the prioritization of UAVs awaiting repair based on their significance.
4.1.2. Maintenance Support Multi-Attribute Decision Model
Objective Function as Equation (15): Maximize the Total Importance
where
is the importance level of the
i-th task.
is a binary variable indicating whether the
i-th task is completed (
= 1 if completed,
= 0 if not completed).
n is the total number of tasks.
Constraints
- (1)
Time Constraint: The total time for all tasks must not exceed the total available time
T, as follows:
where
is the time required for the i-th task.
is the total available time.
Assume there are
R types of maintenance resources, and the available quantity of each resource type is
. The demand for resource type in the
i-th task is
. Then, the resource constraint can be expressed as follows:
where
represents the demand for the
r-th resource by the
i-th task.
denotes the total available quantity of the
r-th resource.
- (3)
Task Completion Constraint
Each task can only be completed once, as follows:
The objective function (15) and constraints ((16)–(18)) collectively constitute a mixed-integer linear programming (MILP) model, which falls into the category of multi-objective combinatorial optimization problems. Given the NP-hard nature of the problem, exact solutions are computationally infeasible for large-scale scenarios. In practical implementations, metaheuristic methods such as Particle Swarm Optimization (PSO), Genetic Algorithm (GA), or Ant Colony Optimization (ACO) are adopted for approximate search. These algorithms efficiently explore high-quality solutions in the solution space by simulating swarm intelligence behavior, making them particularly suitable for handling high-dimensional and nonlinear maintenance scheduling problems. Taking PSO as an example, it balances global exploration and local exploitation through inter-particle information sharing and velocity update strategies, significantly improving computational efficiency while ensuring solution quality.
4.1.3. Calculation of Total Importance
Assume there are currently eight batches of UAVs awaiting maintenance, with the parameters as
Table 1 shows.
Based on the importance parameters of the UAVs awaiting maintenance, the membership function values for the importance attributes of each UAV are calculated according to the steps outlined in
Section 4.1.1. This process yields the decision matrix, as shown in
Table 2.
4.1.4. Simulation Scenario Setup
A total of 177 damaged UAVs awaiting repair are selected as the typical scenario for the maintenance task at the UAV main base. To ensure the scientific validity of the comparative experiment and without considering any efficiency disparities between maintenance systems, the maintenance resources allocated in the traditional manual operation and maintenance mode are set to be identical to those in the intelligent operation and maintenance mode, with the same amount of resources consumed for each UAV. The maintenance resources are detailed in
Table 3, and the UAV maintenance requirements are presented in
Table 4.
In the intelligent operation and maintenance mode, the optimal maintenance support plan is sought through the Particle Swarm Optimization (PSO) algorithm [
29], facilitated by the intelligent decision-making service of the “edge” equipment support command and control system. The parameter settings of the PSO algorithm are shown in
Table 5. Conversely, the traditional manual operation and maintenance mode employs a random sequence for maintenance tasks. The simulation is implemented in Python 3.8 using the following software packages:
NumPy 1.21.5: Matrix operations and data preprocessing.
Matplotlib 3.4.3: Visualization of results.
DEAP 1.3.1: Implementation of the PSO algorithm.
Gurobi 9.5: Verification of PSO results via exact mixed-integer linear programming (MILP) solutions.
4.2. Simulation Results Analysis
When analyzing the advantages of the agent-based maintenance mode, we selected three indicators—the overall importance of the objective function, resource utilization rate, and maintenance task completion status—to compare the simulation results with those of the traditional maintenance mode. The traditional maintenance mode is primarily characterized by three key features: random task scheduling, where maintenance tasks are executed in a random order without algorithmic optimization; fixed-function maintenance resources, in which each resource type is dedicated to one specific task; and static resource configuration, where the same fixed resources as those in the intelligent model are allocated (as shown in
Table 3) but lack dynamic task prioritization based on agents.
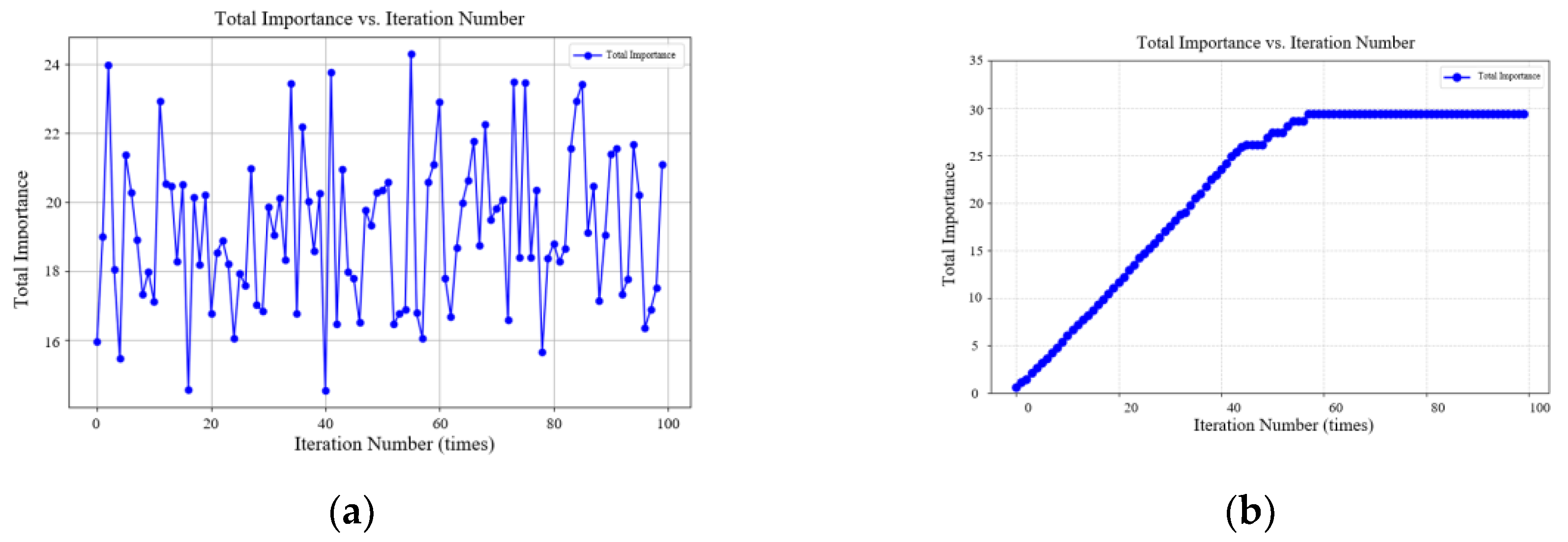
In terms of overall significance, the change curve of the overall significance under different operation and maintenance modes is shown in
Figure 9.
In
Figure 9, the vertical axis represents the Total Importance calculated using Equation (14), while the horizontal axis denotes the iteration number. From the comparison of overall importance results, it can be seen that after 100 simulation runs, the average overall importance under the traditional operation and maintenance mode is 13.62. In contrast, the intelligent operation and maintenance mode converges after the 58th iteration, yielding the optimal maintenance strategy with an overall importance of 29.37. This represents a 115.6% improvement over the traditional mode, demonstrating significant performance advantages.
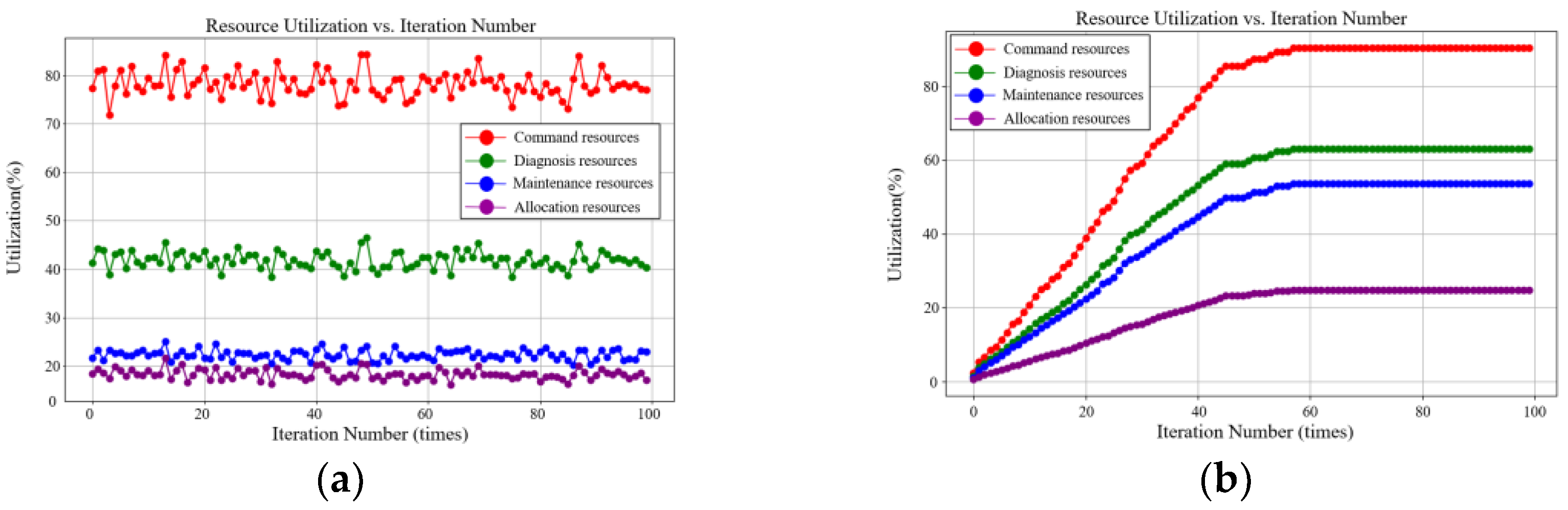
In terms of resource utilization, the variation curves of resource utilization under different operation and maintenance modes are shown in
Figure 10.
In
Figure 10, the vertical axis shows the resource utilization rate (in percentage), and the horizontal axis represents the number of iterations. The simulation results indicate that the average resource utilization rates under the traditional support mode are as follows: command and decision-making at 49.97%, damage diagnosis at 34.60%, maintenance support at 27.85%, and material dispatch at 14.13%. In comparison, the intelligent operation and maintenance mode reaches a stable state after 58 iterations, with resource utilization rates of 90.45% for command and decision-making, 63.18% for damage diagnosis, 53.63% for maintenance support, and 24.83% for material dispatch. These represent increases of 40.48%, 28.58%, 25.78%, and 10.70%, respectively, compared to the traditional mode. This significant improvement is primarily attributed to the application of intelligent agent technology, which endows maintenance resources with multifunctional conversion capabilities, allowing for dynamic adjustment of resource allocation based on mission requirements.
In terms of task completion, the status of maintenance tasks under different operation and maintenance modes is illustrated in
Figure 11.
Regarding the number of maintenance sorties for various types of UAVs, the average total maintenance sorties under the traditional operation and maintenance mode is 25.42, with an average mission completion rate of 14.36% within the stipulated 48-h period. Specifically, the numbers for each batch are as follows: Batch 01 with 2.15 sorties, Batch 02 with 4.33 sorties, Batch 03 with 3.93 sorties, Batch 04 with 2.56 sorties, Batch 05 with 2.89 sorties, Batch 06 with 3.14 sorties, Batch 07 with 4.56 sorties, and Batch 08 with 1.86 sorties. It is noteworthy that in 100 simulations, achieving maintenance for all UAV types failed 31 times, indicating a significant issue of uneven resource allocation in the traditional operation and maintenance mode.
In contrast, the intelligent operation and maintenance mode reached the optimal maintenance strategy after 58 iterations, with the total maintenance sorties increasing to 51 and a mission completion rate of 43.59%. The total maintenance sorties represent a 100.63% increase compared to the traditional mode, and the distribution of maintenance across various UAV types is more balanced: Batch 01 with 7 sorties, Batch 02 with 7 sorties, Batch 03 with 4 sorties, Batch 04 with 6 sorties, Batch 05 with 3 sorties, Batch 06 with 9 sorties, Batch 07 with 14 sorties, and Batch 08 with 1 sortie. This achieves comprehensive coverage and a balanced allocation of maintenance tasks.
In
Figure 11, the vertical axis indicates the number of maintenance sorties, while the horizontal axis stands for the number of iterations. The intelligent model enhances the balance of task coverage by means of the constraint optimization defined in Equations (15)–(18). The performance differences outlined above primarily stem from two core advantages of agent-based technology. Firstly, agent-based maintenance resources possess multi-functional integration capabilities, where a single agent can dynamically switch between roles such as maintenance personnel, refueling operators, maintenance equipment, and technicians, significantly enhancing resource utilization efficiency. Secondly, a decision-making system based on intelligent algorithms can intelligently optimize maintenance strategies by efficiently searching for the best solutions within the solution space, thereby obtaining a globally optimal solution. These characteristics make the intelligent operation and maintenance mode significantly superior to the traditional mode in terms of resource utilization and task completion quality. These results indicate that the intelligent operation and maintenance system for UAV equipment based on multi-agents can significantly improve support efficiency, accuracy, and response speed, providing a new solution for the operation and maintenance of future UAV equipment.
5. Conclusions
Based on multi-agent system technology and integrated with the DoDAF 2.0 architectural framework, this paper constructs an intelligent operation and maintenance system for UAV equipment and verifies its feasibility and effectiveness through simulation. The research results indicate that the intelligent operation and maintenance system for UAV equipment based on multi-agents can significantly improve support efficiency, accuracy, and response speed through intelligent decision-making and the high efficiency and multi-functional integration capabilities of intelligent maintenance equipment.
Future research will focus on the following three aspects. Firstly, further optimizing intelligent decision-making algorithms, such as UAV equipment selection, fault prediction, and resource scheduling, for more diversified UAV operation and maintenance scenarios and task types, especially in civilian applications like logistics and delivery, emergency rescue, and film and media, to enhance the system’s adaptability and robustness. Secondly, delving into how to optimize data interaction and collaboration mechanisms under the “cloud-edge-end” architecture from the perspective of an overall system connectivity plan to achieve global optimal allocation of operation and maintenance resources. Lastly, exploring deep collaboration modes between agents and human operators and studying human–machine collaborative decision-making mechanisms to ensure the efficient operation of the intelligent operation and maintenance system for UAV equipment in complex environments. These research efforts will provide theoretical support and technical assurance for building a more intelligent and integrated operation and maintenance system for UAV equipment.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}