


A Survey on Multi-UAV Path Planning: Classification, Algorithms, Open Research Problems, and Future Directions




Abstract
1. Introduction
1.1. Research Challenges
1.2. Research Scope and Contribution
- We critically review more than 100 published papers on UAV path planning. To this end, we carefully selected relevant refereed articles from scholarly journals and conference proceedings.
- We classify the existing research on UAV path planning based on multi-UAV algorithms and features. To this end, we focus on a survey of various approaches, including metaheuristic, classical, heuristic, machine learning, and hybrid methods. This significant work contributes to the design and development of next-generation UAV systems.
- We identify and discuss open research problems, including multi-UAV path planning, focusing on machine learning and hybrid algorithms for practical application scenarios such as disaster rescue and recovery management.
1.3. Summary of Existing Algorithms
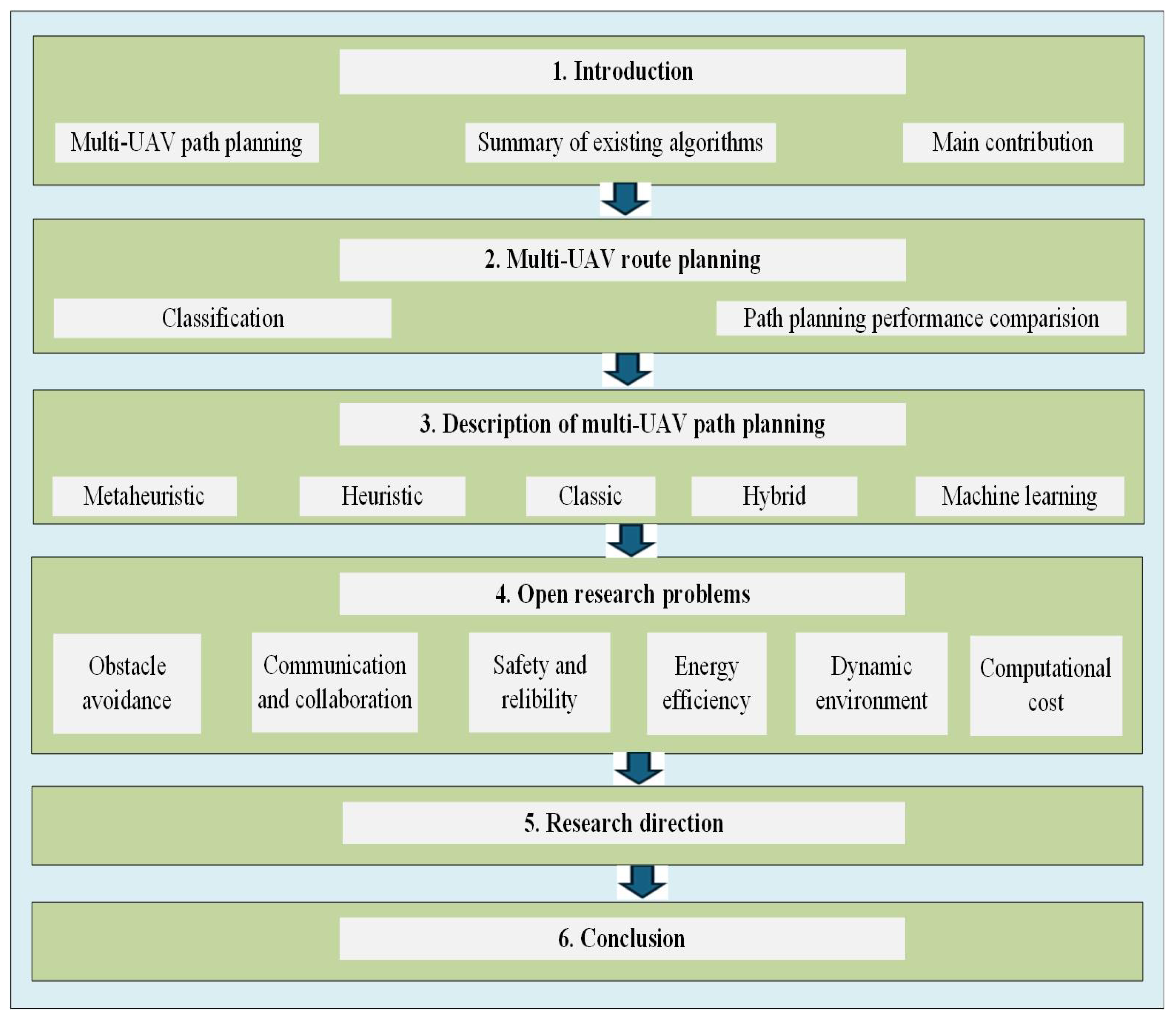
1.4. Paper Organization
2. Multi-UAV Path Planning Algorithms
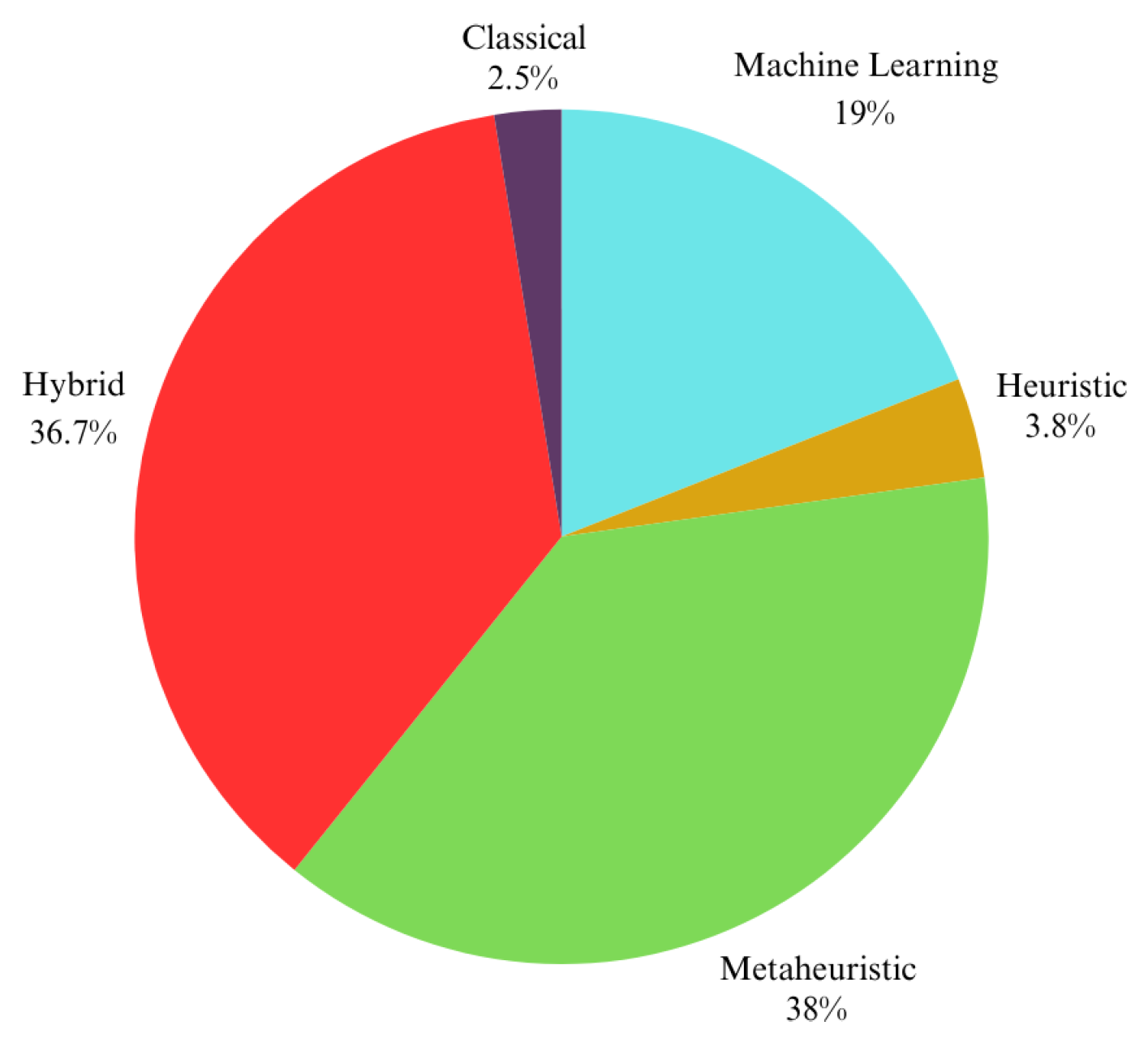
2.1. Classification of Multi-UAV Path Planning Algorithms
2.2. Existing Path Planning Algorithms
3. Description of Multi-UAV Path Planning Approaches
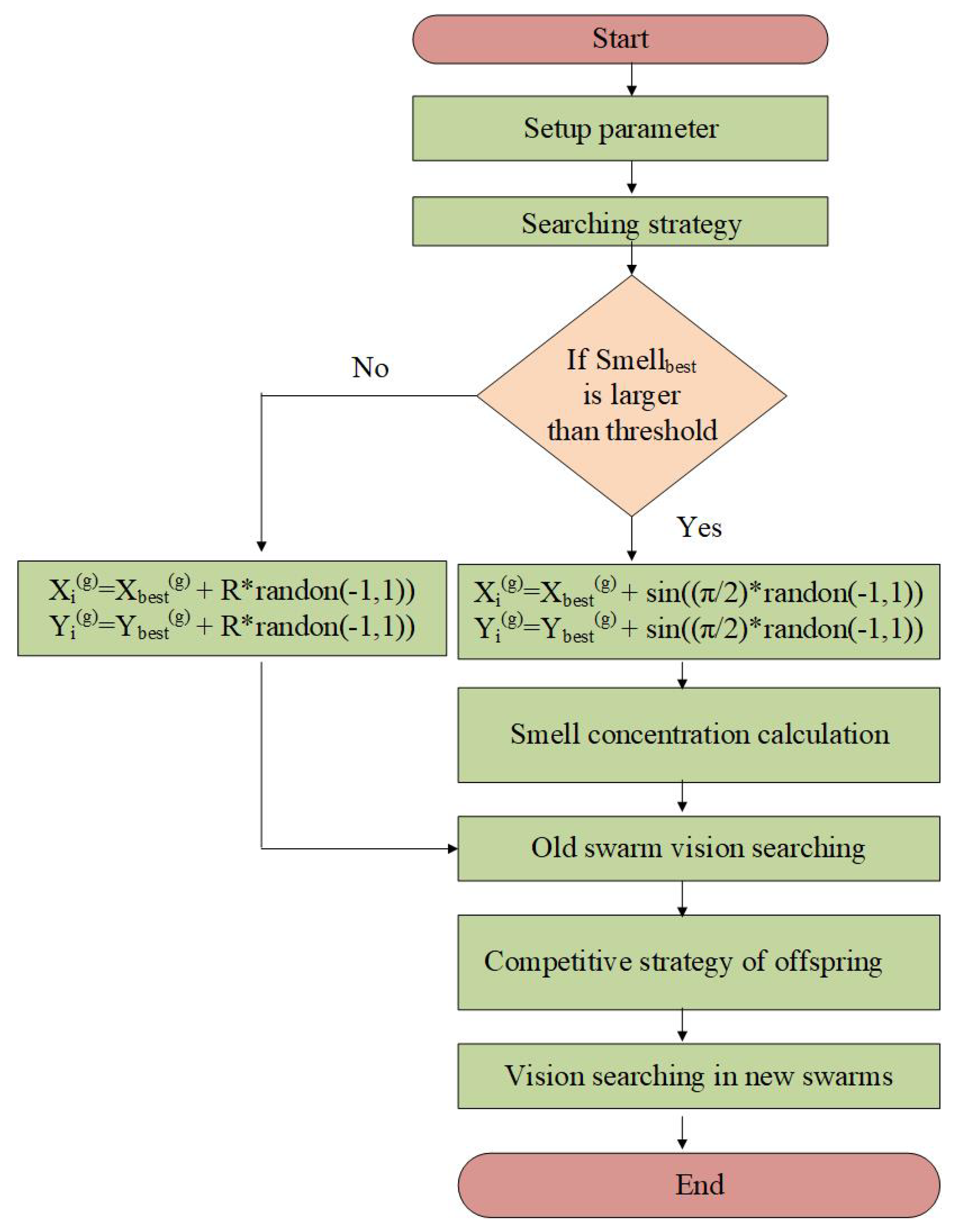
3.1. Metaheuristic Approach
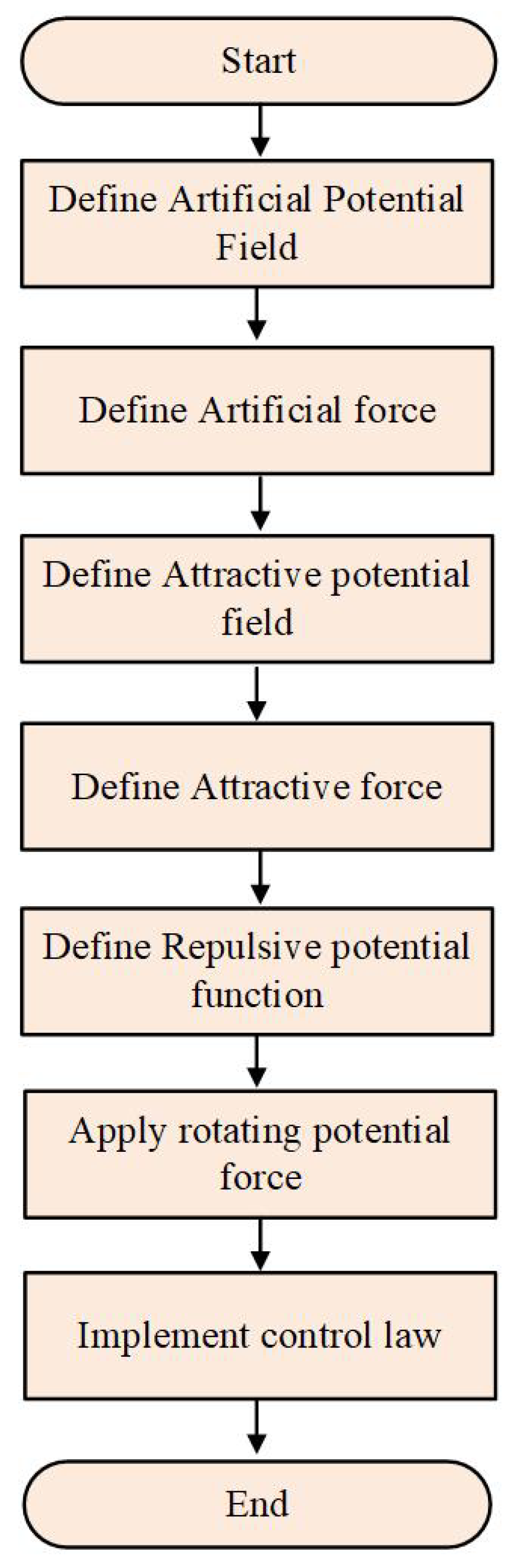
3.2. Classical Approach
3.3. Heuristic Approach
3.4. Machine Learning Approach
3.5. Hybrid Approach
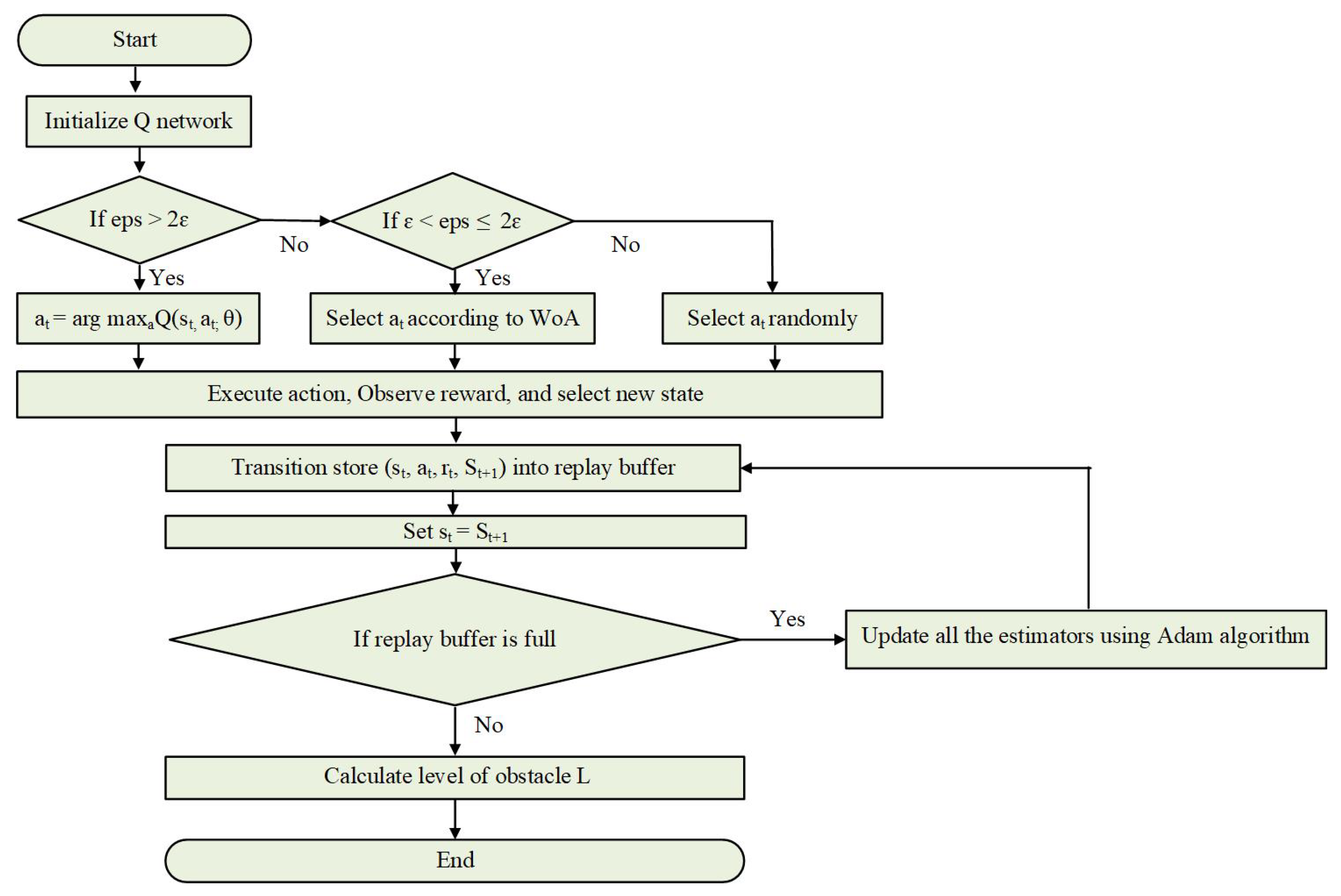
- If, , then Equation (5) is applied.
- Otherwise, if , is selected according to WoA.
- Otherwise, is selected randomly.
3.6. Summary of Multi-UAV Path Planning Approaches
4. Open Research Problems
4.1. Obstacle Avoidance
4.2. Communication and Collaboration
4.3. Safety and Reliability
4.4. Dynamic Environments
4.5. Energy Efficiency
4.6. System Complexity and Computational Cost
4.7. Summary of Open Research Issues
5. Future Research Directions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Acronym
| Acronym | Explanation |
| ABC | Artificial Bee Colony |
| APF | Artificial Potential Field |
| AQLPSO | Adaptive Q-Learning-based Particle Swarm Optimization |
| ACO | Ant Colony Optimization |
| BFO | Bacteria Foraging Optimization |
| BINN-HHO | Bioinspired neural network and improved Harris hawk optimization |
| BRKGA | Biased Random Key Genetic Algorithm |
| CGWO | Chaotic Gray Wolf Optimization |
| CL-DMSPSO | Comprehensive learning dynamic multi-swarm particle swarm optimization |
| CNN | Convolution Neural Network |
| CPP | Coverage Path Planning |
| CRO | Coral Reef Optimization |
| CS | Cuckoo Search |
| Deep RL ESN | Deep Reinforcement Learning Echo State Network |
| DDPG | Deep deterministic policy gradient algorithm |
| DE | Differential Evolution |
| Distributed formation algorithm 3 | |
| DPIO | Discrete pigeon-inspired optimization |
| DQN | Deep Q-network |
| DDQN | Double deep Q-network |
| D3QN | Dueling double deep Q-network |
| DQN - RRT | Deep Q-network–Rapidly exploring Random Tree |
| EB-A* | Elastic band–A-Star |
| ePFC | Extended potential field controller |
| FP-GPSO | Fermat point-based grouping particle swarm optimization |
| GA | Genetic Algorithm |
| GA-Homotopic | Genetic Algorithm and Homotopic Algorithm |
| GCS | Ground control station |
| GH | Greedy Heuristic |
| GP | Gaussian Process |
| HAS-DQN | Hexagonal Area Search Deep Q-Network |
| HTS-VND | Hybrid tabu search-variable neighborhood descent |
| Hybrid GH | Hybrid Greedy Heuristic |
| Improved PSO and GPM | Improved particle swarm optimization and Gaussian pseudo-spectral method |
| Improved EB and A-Star | Improved Elastic Band and A-Star Algorithm |
| IVD | Improved Voronoi Diagram |
| IABC | Improved Artificial Bee Colony |
| IAPF | Improved Artificial Potential Field |
| IPSO | Improved Practical Swarm Optimization |
| LM-GWO | Levy flight-based multi-population grey wolf optimisation |
| MADDPG | Multi-Agent Deep Deterministic Policy Gradient |
| MCMOPSO-RL | Multi-objective particle swarm optimization with multi-mode collaboration based on reinforcement learning |
| MHS | Modified Harmony Search |
| MMACO | Maximum minimum ant colony optimization |
| MODRL | multi-objective deep reinforcement learning |
| MPC and PSO | Model predictive control and particle swarm optimization |
| MSFOA | Multiple Swarm Fruit Fly Optimization Algorithm |
| MTSP | Multiple Traveling Salesman Problem |
| MVD | Modified Voronoi Diagram |
| MVO | Multi-Verse Optimizer |
| MUCS-BSAE | Multi-UAV collaborative search algorithm based on the binary search algorithm |
| NSGA multi-objective EA | Non Dominated Sorting Genetic Algorithm multi-objective Evolutionary algorithms |
| OPP | Optimal Path Planning |
| ORPFOA | Optimal reference point Fruit Fly Optimization Algorithm |
| PDE | Partial Differential Equation |
| PIO | Pigeon Inspired Optimization |
| POMDP | Partially Observable Markov Decision Process |
| PPSwarm | PSO (Practical Swarm Optimization) + RRT (Rapid-exploring Random Trees) |
| RBF-ANN | Radial Basis Functions Artificial Neural Network |
| RGV | Reduced Visibility Graph |
| RRT | Rapidly exploring Random Tree |
| SFLA | Shuffled Frog Leaping Algorithm |
| SIRIPPA | Secondary Immune Responses-based Immune Path Planning Algorithm |
| SPVM and PSO | Spatial Refined Voting Mechanism and Particle Swarm Optimization |
| TLBO | Teaching Learning Based Optimization |
| UAV | unmanned aerial vehicle |
| VD | Voronoi Diagram |
| WoLFIGA | Win or learn fast policy with Infinitesimal gradient ascent |
| WPL | Weighted Policy Learner |
| WDQN | Whale inspired deep Q-network |
References
- Wu, Y.; Nie, M.; Ma, X.; Guo, Y.; Liu, X. Co-Evolutionary Algorithm-Based Multi-Unmanned Aerial Vehicle Cooperative Path Planning. Drones 2023, 7, 606. [Google Scholar] [CrossRef]
- Sarkar, N.I.; Gul, S. Artificial intelligence-based autonomous UAV networks: A survey. Drones 2023, 7, 322. [Google Scholar] [CrossRef]
- Abid, M.; El Kafhali, S.; Amzil, A.; Hanini, M. Optimization of UAV Flight Paths in Multi-UAV Networks for Efficient Data Collection. Arab. J. Sci. Eng. 2024, 1–26. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar]
- Zhang, S.; Liu, W.; Ansari, N. Completion time minimization for data collection in a UAV-enabled IoT network: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2023, 72, 14734–14742. [Google Scholar]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar]
- Shiri, H.; Park, J.; Bennis, M. Massive Autonomous UAV Path Planning: A Neural Network Based Mean-Field Game Theoretic Approach. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Anastasiou, A.; Kolios, P.; Panayiotou, C.; Papadaki, K. Swarm path planning for the deployment of drones in emergency response missions. In Proceedings of the 2020 IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 456–465. [Google Scholar]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV Path Planning Using Optimization Approaches: A Survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Rocha, L.; Vivaldini, K. Analysis and contributions of classical techniques for path planning. In Proceedings of the 2021 IEEE Latin American Robotics Symposium (LARS), 2021 Brazilian Symposium on Robotics (SBR), and 2021 Workshop on Robotics in Education (WRE), Natal, Brazil, 11–15 October 2021; pp. 54–59. [Google Scholar]
- Aljalaud, F.; Kurdi, H.; Youcef-Toumi, K. Bio-inspired multi-UAV path planning heuristics: A review. Mathematics 2023, 11, 2356. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar]
- Chronis, C.; Anagnostopoulos, G.; Politi, E.; Garyfallou, A.; Varlamis, I.; Dimitrakopoulos, G. Path planning of autonomous UAVs using reinforcement learning. J. Phys. Conf. Ser. 2023, 2526, 012088. [Google Scholar] [CrossRef]
- Li, L.; Wang, L.; Hou, J.; Ma, J.; Liu, Y. Multi-UAV Path Planning Based on DRL for Data Collection in UAV-Assisted IoT. In Proceedings of the 2024 14th International Conference on Information Science and Technology (ICIST), Chengdu, China, 6–9 December 2024; pp. 566–573. [Google Scholar] [CrossRef]
- López, B.; Muñoz, J.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Path Planning and Collision Risk Management Strategy for Multi-UAV Systems in 3D Environments. Sensors 2021, 21, 4414. [Google Scholar] [CrossRef]
- Pérez-Carabaza, S.; Besada-Portas, E.; López-Orozco, J.A. Minimizing the searching time of multiple targets in uncertain environments with multiple UAVs. Appl. Soft Comput. 2024, 155, 111471. [Google Scholar] [CrossRef]
- Shi, J.; Tan, L.; Zhang, H.; Lian, X.; Xu, T. Adaptive multi-UAV path planning method based on improved gray wolf algorithm. Comput. Electr. Eng. 2022, 104, 108377. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. Trajectory planning for multi-robot systems: Methods and applications. Expert Syst. Appl. 2021, 173, 114660. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, L.; Li, Y.; Song, S.; Ma, S.; Yang, F.; Zhai, L. Path planning of multi-UAVs based on deep Q-network for energy-efficient data collection in UAVs-assisted IoT. Veh. Commun. 2022, 36, 100491. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, G.; Da, Q.; Lu, D.; Zhao, Y.; Li, S.; Lang, D. Multiple Unmanned Aerial Vehicle Autonomous Path Planning Algorithm Based on Whale-Inspired Deep Q-Network. Drones 2023, 7, 572. [Google Scholar] [CrossRef]
- Liu, X.; Chai, Z.Y.; Li, Y.L.; Cheng, Y.Y.; Zeng, Y. Multi-objective deep reinforcement learning for computation offloading in UAV-assisted multi-access edge computing. Inf. Sci. 2023, 642, 119154. [Google Scholar] [CrossRef]
- Stolfi, D.H.; Danoy, G. An Evolutionary Algorithm to Optimise a Distributed UAV Swarm Formation System. Appl. Sci. 2022, 12, 10218. [Google Scholar] [CrossRef]
- Zhou, C.; Kadhim, K.M.R.; Zheng, X. Multi-UAVs path planning for data harvesting in adversarial scenarios. Comput. Commun. 2024, 221, 42–53. [Google Scholar] [CrossRef]
- Liu, Y.; Qi, N.; Yao, W.; Zhao, J.; Xu, S. Cooperative Path Planning for Aerial Recovery of a UAV Swarm Using Genetic Algorithm and Homotopic Approach. Appl. Sci. 2020, 10, 4154. [Google Scholar] [CrossRef]
- Zhang, X.; Xia, S.; Li, X.; Zhang, T. Multi-objective particle swarm optimization with multi-mode collaboration based on reinforcement learning for path planning of unmanned air vehicles. Knowl.-Based Syst. 2022, 250, 109075. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, L.; Cai, B.; Liang, Y. Unified path planning for composite UAVs via Fermat point-based grouping particle swarm optimization. Aerosp. Sci. Technol. 2024, 148, 109088. [Google Scholar] [CrossRef]
- Shao, S.; He, C.; Zhao, Y.; Wu, X. Efficient Trajectory Planning for UAVs Using Hierarchical Optimization. IEEE Access 2021, 9, 60668–60681. [Google Scholar] [CrossRef]
- Hu, X.; Liu, Y.; Wang, G. Optimal search for moving targets with sensing capabilities using multiple UAVs. J. Syst. Eng. Electron. 2017, 28, 526–535. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X.; Zhang, Y.; Guan, X. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chin. J. Aeronaut. 2019, 32, 1504–1519. [Google Scholar] [CrossRef]
- Meng, Q.; Chen, K.; Qu, Q. PPSwarm: Multi-UAV Path Planning Based on Hybrid PSO in Complex Scenarios. Drones 2024, 8, 192. [Google Scholar] [CrossRef]
- Li, S.; Zhang, R.; Ding, Y.; Qin, X.; Han, Y.; Zhang, H. Multi-UAV Path Planning Algorithm Based on BINN-HHO. Sensors 2022, 22, 9786. [Google Scholar] [CrossRef]
- Xu, L.; Cao, X.; Du, W.; Li, Y. Cooperative path planning optimization for multiple UAVs with communication constraints. Knowl.-Based Syst. 2023, 260, 110164. [Google Scholar] [CrossRef]
- Güven, İ.; Yanmaz, E. Multi-objective path planning for multi-UAV connectivity and area coverage. Ad Hoc Netw. 2024, 160, 103520. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, G.; Zhou, K.; Zhu, L. A parallel particle swarm optimization and enhanced sparrow search algorithm for unmanned aerial vehicle path planning. Heliyon 2023, 9, e14784. [Google Scholar] [CrossRef]
- Cho, S.; Park, H.; Lee, H.; Shim, D.; Kim, S.Y. Coverage Path Planning for Multiple Unmanned Aerial Vehicles in Maritime Search and Rescue Operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Cui, Y.; Dong, W.; Hu, D.; Liu, H. The Application of Improved Harmony Search Algorithm to Multi-UAV Task Assignment. Electronics 2022, 11, 1171. [Google Scholar] [CrossRef]
- Yuan, X.; Feng, Z. A Study of Path Planning for Multi- UAVs in Random Obstacle Environment Based on Improved Artificial Potential Field Method. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 5241–5245. [Google Scholar] [CrossRef]
- Bui, D.N.; Phung, M.D. Radial basis function neural networks for formation control of unmanned aerial vehicles. Robotica 2024, 42, 1842–1860. [Google Scholar] [CrossRef]
- Jing, W.; Deng, D.; Wu, Y.; Shimada, K. Multi-UAV Coverage Path Planning for the Inspection of Large and Complex Structures. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 1480–1486. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Li, M.; Sun, P.F.; Jeon, S.W.; Zhao, X.; Jin, H. Multi-UAV Path Planning with Genetic Algorithm. In Proceedings of the 2023 14th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 11–13 October 2023; pp. 918–920. [Google Scholar] [CrossRef]
- Ntakolia, C.; Platanitis, K.S.; Kladis, G.P.; Skliros, C.; Zagorianos, A.D. A Genetic Algorithm enhanced with Fuzzy-Logic for multi-objective Unmanned Aircraft Vehicle path planning missions. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 114–123. [Google Scholar] [CrossRef]
- Zhong, Y.; Wang, L.; Lin, M.; Zhang, H. Discrete pigeon-inspired optimization algorithm with Metropolis acceptance criterion for large-scale traveling salesman problem. Swarm Evol. Comput. 2019, 48, 134–144. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, T.; Cai, Z.; Zhao, J.; Wu, K. Multi-UAV coordination control by chaotic grey wolf optimization based distributed MPC with event-triggered strategy. Chin. J. Aeronaut. 2020, 33, 2877–2897. [Google Scholar] [CrossRef]
- Ali, Z.; Han, Z.; Zhengru, D. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment. Meas. Control 2023, 56, 002029402091572. [Google Scholar] [CrossRef]
- Deng, L.; Chen, H.; Zhang, X.; Liu, H. Three-Dimensional Path Planning of UAV Based on Improved Particle Swarm Optimization. Mathematics 2023, 11, 1987. [Google Scholar] [CrossRef]
- Castro, G.G.R.d.; Berger, G.S.; Cantieri, A.; Teixeira, M.; Lima, J.; Pereira, A.I.; Pinto, M.F. Adaptive Path Planning for Fusing Rapidly Exploring Random Trees and Deep Reinforcement Learning in an Agriculture Dynamic Environment UAVs. Agriculture 2023, 13, 354. [Google Scholar] [CrossRef]
- Xue, Y.; Chen, W. Multi-Agent Deep Reinforcement Learning for UAVs Navigation in Unknown Complex Environment. IEEE Trans. Intell. Veh. 2024, 9, 2290–2303. [Google Scholar] [CrossRef]
- Zourari, A.; Youssefi, M.A.; Youssef, Y.; Dakir, R. Reinforcement Q-Learning for Path Planning of Unmanned Aerial Vehicles (UAVs) in Unknown Environments. Int. Rev. Autom. Control. (IREACO) 2023, 16, 253–259. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, R.; Zhong, L.; Hou, Z. Multi-UAV Path Planning and Following Based on Multi-Agent Reinforcement Learning. Drones 2024, 8, 18. [Google Scholar] [CrossRef]
- Frattolillo, F.; Brunori, D.; Iocchi, L. Scalable and Cooperative Deep Reinforcement Learning Approaches for Multi-UAV Systems: A Systematic Review. Drones 2023, 7, 236. [Google Scholar] [CrossRef]
- Xing, X.; Zhou, Z.; Li, Y.; Xiao, B.; Xun, Y. Multi-UAV Adaptive Cooperative Formation Trajectory Planning Based on An Improved MATD3 Algorithm of Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2024, 73, 12484–12499. [Google Scholar] [CrossRef]
- Baldazo, D.; Parras, J.; Zazo, S. Decentralized Multi-Agent Deep Reinforcement Learning in Swarms of Drones for Flood Monitoring. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Tian, G.; Zhang, L.; Bai, X.; Wang, B. Real-time Dynamic Track Planning of Multi-UAV Formation Based on Improved Artificial Bee Colony Algorithm. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 10055–10060. [Google Scholar] [CrossRef]
- Wu, X.; Wu, S.; Yuan, S.; Wang, X.; Zhou, Y. Multi-UAV Path Planning with Collision Avoidance in 3D Environment Based on Improved APF. In Proceedings of the 2023 9th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 21–23 April 2023; pp. 221–226. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Hanzo, L. Multi-Agent Deep Reinforcement Learning-Based Trajectory Planning for Multi-UAV Assisted Mobile Edge Computing. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 73–84. [Google Scholar]
- Shi, K.; Zhang, X.; Xia, S. Multiple Swarm Fruit Fly Optimization Algorithm Based Path Planning Method for Multi-UAVs. Appl. Sci. 2020, 10, 2822. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, L.; Yuan, M.; Shen, Y. A Novel Online Path Planning Algorithm for Multi-Robots Based on the Secondary Immune Response in Dynamic Environments. Electronics 2024, 13, 562. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning. Neurocomputing 2018, 313, 229–246. [Google Scholar] [CrossRef]
- Yu, Y.; Deng, Y.; Duan, H. Multi-UAV Cooperative Path Planning via Mutant Pigeon Inspired Optimization with Group Learning Strategy. In Advances in Swarm Intelligence; Springer: Cham, Switzerland, 2021; pp. 195–204. [Google Scholar] [CrossRef]
- Li, K.; Ge, F.; Han, Y.; Wang, Y.; Xu, W. Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm. Eng. Appl. Artif. Intell. 2020, 94, 103807. [Google Scholar] [CrossRef]
- Liu, H.; Ge, J.; Wang, Y.; Li, J.; Ding, K.; Zhang, Z.; Guo, Z.; Li, W.; Lan, J. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method. Actuators 2022, 11, 4. [Google Scholar] [CrossRef]
- Ramirez Atencia, C.; Del Ser, J.; Camacho, D. Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. Swarm Evol. Comput. 2019, 44, 480–495. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, C.; Yuan, Y.; Cui, J.; Qi, L. A novel multi-objective evolutionary algorithm with a two-fold constraint-handling mechanism for multiple UAV path planning. Expert Syst. Appl. 2024, 238, 121862. [Google Scholar] [CrossRef]
- Yang, L.; Li, P.; Qian, S.; Quan, H.; Miao, J.; Liu, M.; Hu, Y.; Memetimin, E. Path Planning Technique for Mobile Robots: A Review. Machines 2023, 11, 980. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R. Multi-UAV Area Coverage Track Planning Based on the Voronoi Graph and Attention Mechanism. Appl. Sci. 2024, 14, 7844. [Google Scholar] [CrossRef]
- Zu, W.; Fan, G.; Gao, Y.; Ma, Y.; Zhang, H.; Zeng, H. Multi-UAVs Cooperative Path Planning Method based on Improved RRT Algorithm. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1563–1567. [Google Scholar] [CrossRef]
- Fu, Z.; Yu, J.; Xie, G.; Chen, Y.; Mao, Y. A Heuristic Evolutionary Algorithm of UAV Path Planning. Wirel. Commun. Mob. Comput. 2018, 2018, 2851964. [Google Scholar] [CrossRef]
- Lin, J.; Ye, F.; Yu, Q.; Xing, J.; Quan, Z.; Sheng, C. Research on Multi-UAVs Route Planning Based on the Integration of Improved Elastic Band and A-Star Algorithm. In Proceedings of the IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 28–30 October 2022. [Google Scholar]
- Du, Y. Multi-UAV Search and Rescue with Enhanced A * Algorithm Path Planning in 3D Environment. Int. J. Aerosp. Eng. 2023, 2023, 8614117. [Google Scholar] [CrossRef]
- Guo, K.; Luo, H.; Tao, H.; Ruby, R.; Qin, Z.; Liu, K. Multi-UAVs Collaborative Search Scheme in Marine Environments using Deep Reinforcement Learning. In Proceedings of the 2023 Eleventh International Conference on Advanced Cloud and Big Data (CBD), Los Alamitos, CA, USA, 18–19 December 2023; pp. 39–44. [Google Scholar] [CrossRef]
- Arranz, R.; Carramiñana, D.; Miguel, G.d.; Besada, J.A.; Bernardos, A.M. Application of Deep Reinforcement Learning to UAV Swarming for Ground Surveillance. Sensors 2023, 23, 8766. [Google Scholar] [CrossRef]
- Jang, B.; Kim, M.; Harerimana, G.; Kim, J. Q-Learning Algorithms: A Comprehensive Classification and Applications. IEEE Access 2019, 7, 133653–133667. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Y.; Li, D.; Shi, J.; Li, X.; Gao, L.; Yu, L.; Han, G.; Wu, J. An Adaptive Conversion Speed Q-Learning Algorithm for Search and Rescue UAV Path Planning in Unknown Environments. IEEE Trans. Veh. Technol. 2023, 72, 15391–15404. [Google Scholar] [CrossRef]
- Souto, A.; Alfaia, R.; Cardoso, E.; Araújo, J.; Francês, C. UAV Path Planning Optimization Strategy: Considerations of Urban Morphology, Microclimate, and Energy Efficiency Using Q-Learning Algorithm. Drones 2023, 7, 123. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A Review on IoT Deep Learning UAV Systems for Autonomous Obstacle Detection and Collision Avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef]
- Dhuheir, M.; Baccour, E.; Erbad, A.; Al-Obaidi, S.; Hamdi, M. Deep Reinforcement Learning for Trajectory Path Planning and Distributed Inference in Resource-Constrained UAV Swarms. IEEE Internet Things J. 2022, 10, 8185–8201. [Google Scholar] [CrossRef]
- Bayerlein, H.; Theile, M.; Caccamo, M.; Gesbert, D. Multi-UAV Path Planning for Wireless Data Harvesting with Deep Reinforcement Learning. IEEE Open J. Commun. Soc. 2021, 2, 1171–1187. [Google Scholar] [CrossRef]
- Tan, X.; Han, L.; Gong, H.; Wu, Q. Biologically Inspired Complete Coverage Path Planning Algorithm Based on Q-Learning. Sensors 2023, 23, 4647. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pedrosa, E.; Pereira, A.; Lau, N.; Fernandez-Blanco, E. Q-Learning based system for Path Planning with Unmanned Aerial Vehicles swarms in obstacle environments. Expert Syst. Appl. 2024, 235, 121240. [Google Scholar] [CrossRef]
- Sanna, G.; Godio, S.; Guglieri, G. Neural Network Based Algorithm for Multi-UAV Coverage Path Planning. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1210–1217. [Google Scholar] [CrossRef]
- Zhao, B.; Huo, M.; Li, Z.; Yu, Z.; Qi, N. Graph-based multi-agent reinforcement learning for large-scale UAVs swarm system control. Aerosp. Sci. Technol. 2024, 150, 109166. [Google Scholar] [CrossRef]
- Tan, L.; Zhang, H.; Liu, Y.; Yuan, T.; Jiang, X.; Shang, Z. An adaptive Q-learning based particle swarm optimization for multi-UAV path planning. Soft Comput. 2024, 28, 7931–7946. [Google Scholar] [CrossRef]
- Gad, A. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Hu, T.; Ahmad, I.; M S M, A.; Chang, K. 3D Optimal Surveillance Trajectory Planning for Multiple UAVs by Using Particle Swarm Optimization With Surveillance Area Priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Su, W.; Gao, M.; Gao, X.; Xuan, Z. Enhanced Multi-UAV Path Planning in Complex Environments with Voronoi-Based Obstacle Modelling and Q-Learning. Int. J. Aerosp. Eng. 2024, 2024, 5114696. [Google Scholar] [CrossRef]
- Wan, P.; Wang, S.; Xu, G.; Long, Y.; Hu, R. Hybrid Heuristic-Based Multi-UAV Route Planning for Time-Dependent Data Collection. IEEE Internet Things J. 2024, 11, 24134–24147. [Google Scholar]
- Xiao, S.; Tan, X.; Wang, J. A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics 2021, 10, 853. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, M.; Low, K.H. 3D path planning and real-time collision resolution of multirotor drone operations in complex urban low-altitude airspace. Transp. Res. Part Emerg. Technol. 2021, 129, 103123. [Google Scholar]
- Theile, M.; Bayerlein, H.; Nai, R.; Gesbert, D.; Caccamo, M. Uav path planning using global and local map information with deep reinforcement learning. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2020. [Google Scholar]
- Li, J.; Zhang, W.; Ren, J.; Yu, W.; Wang, G.; Ding, P.; Wang, J.; Zhang, X. A Multi-Area Task Path-Planning Algorithm for Agricultural Drones Based on Improved Double Deep Q-Learning Net. Agriculture 2024, 14, 1294. [Google Scholar] [CrossRef]
- Giagkos, A.; Tuci, E.; Wilson, M.S.; Charlesworth, P.B. UAV flight coordination for communication networks: Genetic algorithms versus game theory. Soft Comput. 2021, 25, 9483–9503. [Google Scholar] [CrossRef]
- Bu, Y.; Yan, Y.; Yang, Y. Advancement Challenges in UAV Swarm Formation Control: A Comprehensive Review. Drones 2024, 8, 320. [Google Scholar] [CrossRef]
- Hu, K.; Xu, K.; Xia, Q.; Li, M.; Song, Z.; Song, L.; Sun, N. An overview: Attention mechanisms in multi-agent reinforcement learning. Neurocomputing 2024, 598, 128015. [Google Scholar] [CrossRef]
- Zhao, Z.; Jin, M.; Lu, E.; Yang, S. Path Planning of Arbitrary Shaped Mobile Robots with Safety Consideration. IEEE Trans. Intell. Transp. Syst. 2021, 23, 16474–16483. [Google Scholar] [CrossRef]
- Castro, G.; Faria Pinto, M.; Biundini, I.; Melo, A.; Marcato, A.; Haddad, D. Dynamic Path Planning Based on Neural Networks for Aerial Inspection. J. Control Autom. Electr. Syst. 2022, 34, 85–105. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, Y. A DDQN-Based Path Planning Method for Multi-UAVs in a 3D Indoor Environment. In Proceedings of the 2022 4th International Conference on Control and Robotics (ICCR), Guangzhou, China, 2–4 December 2022; pp. 476–480. [Google Scholar] [CrossRef]
- Blais, M.A.; Akhloufi, M. Drone Swarm Coordination Using Reinforcement Learning for Efficient Wildfires Fighting. SN Comput. Sci. 2024, 5, 314. [Google Scholar] [CrossRef]
- Zhao, C.; Liu, J.; Sheng, M.; Teng, W.; Zheng, Y.; Li, J. Multi-UAV Trajectory Planning for Energy-Efficient Content Coverage: A Decentralized Learning-Based Approach. IEEE J. Sel. Areas Commun. 2021, 39, 3193–3207. [Google Scholar] [CrossRef]
- Chen, S.; Mo, Y.; Wu, X.; Xiao, J.; Liu, Q. Reinforcement Learning-Based Energy-Saving Path Planning for UAVs in Turbulent Wind. Electronics 2024, 13, 3190. [Google Scholar] [CrossRef]
- Yu, Y.; Lee, S. Efficient Multi-UAV Path Planning for Collaborative Area Search Operations. Appl. Sci. 2023, 13, 8728. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones 2023, 7, 169. [Google Scholar] [CrossRef]
- Meng, Q.; Qu, Q.; Chen, K.; Yi, T. Multi-UAV Path Planning Based on Cooperative Co-Evolutionary Algorithms with Adaptive Decision Variable Selection. Neurocomputing 2024, 8, 435. [Google Scholar]
- Jerebic, J.; Mernik, M.; Liu, S.H.; Ravber, M.; Baketarić, M.; Mernik, L.; Črepinšek, M. A novel direct measure of exploration and exploitation based on attraction basins. Expert Syst. Appl. 2021, 167, 114353. [Google Scholar] [CrossRef]
- Luo, J.; Tian, Y.; Wang, Z. Research on Unmanned Aerial Vehicle Path Planning. Neurocomputing 2024, 8, 51. [Google Scholar]
- Zhang, H.; Tan, L.; Liu, Y.; Yuan, T.; Zhao, H.; Liu, H. Energy-Efficient Multi-UAV Collaborative Path Planning using Levy Flight and Improved Gray Wolf Optimization. In Proceedings of the 2024 International Joint Conference on Neural Networks (IJCNN), Yokohama, Japan, 30 June–5 July 2024; pp. 1–8. [Google Scholar] [CrossRef]
- He, W.; Qi, X.; Liu, L. A novel hybrid particle swarm optimization for multi-UAV cooperate path planning. Appl. Intell. 2021, 51, 7350–7364. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. UAV swarm path planning with reinforcement learning for field prospecting. Appl. Intell. 2022, 52, 14101–14118. [Google Scholar] [CrossRef]
- Xu, Y.; Wei, Y.; Jiang, K.; Wang, D.; Deng, H. Multiple UAVs Path Planning Based on Deep Reinforcement Learning in Communication Denial Environment. Mathematics 2023, 11, 405. [Google Scholar] [CrossRef]
- Jin, P.; Cui, Y.; Wang, A.; Hou, Z.; Wang, Y. Optimal Path Planning for Multi-UAV Based on Pseudo-spectral Method. In Proceedings of the 2020 International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Fuzhou, China, 12–14 June 2020; pp. 417–422. [Google Scholar] [CrossRef]
- Zhao, W.; Li, L.; Wang, Y.; Zhan, H.; Fu, Y.; Song, Y. Research on A Global Path-Planning Algorithm for Unmanned Arial Vehicle Swarm in Three-Dimensional Space Based on Theta*–Artificial Potential Field Method. Drones 2024, 8, 125. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Problem Addressed | Limitation | Environmental Type | Extensive Area Scalability | Scenarios | Reference |
|---|---|---|---|---|---|---|
| HAS-DQN | Overlapped coverage areas and low energy efficiency | Computational cost and system complexity are not considered | Dynamic | No | Data collection | [19] |
| WDQN | :imitations of standard route planning algorithms when traversing across unexpected and complex locations | UAV height is not taken into consideration | Dynamic | No | Emergency rescue | [20] |
| MODRL | Addresses the computational offloading problem (COP) by balancing energy usage and latency issues | Communication from the UAV to the ground control station is not taken into consideration | Dynamic | Yes | Mountainous and disaster areas | [21] |
| The problem of overfitting difficult problems | Energy efficiency is lacking | Dynamic | No | 270 Unseen scenarios | [22] | |
| DQN | Battery constraints and their impact on data collection and flight safety | The pace of convergence is not taken into account | Dynamic | No | Collecting data in restricted areas | [23] |
| GA and Homotopic Algorithm | Large-scale aerial recovery and secure returning from forbidden areas | Height and energy efficiency are not addressed | Dynamic | Yes | Multi-UAV recovery using a controller UAV | [24] |
| MCMOPSO-RL | Determining an optimal approach in a complicated environment due to the presence of various impediments | Resource requirements are absent | Dynamic | Yes | Managing several static barriers in a complex setting | [25] |
| FP-GPSO | Establishment of optimal path planning in a long flight range with high flexibility | Resource requirements and communication between UAVs and the ground control station are not taken into consideration | Dynamic | No | A carrier UAV and several parasite UAVs work together to provide a long flight range | [26] |
| Improved PSO and GPM | Addresses the flying-time issue using swarm intelligence and graph-based algorithms | UAV height and resource requirements are not considered | Dynamic | No | Multi-UAV flight times are shortened in environments with a lot of obstacles | [27] |
| MPC and PSO | Search with moving targets | Energy efficiency and UAV height are not considered | Ddynamic | No | Multi-UAVs look for several moving targets | [28] |
| SPVM and PSO | Delayed convergence and local optimality problems | Resource requirements and energy efficiency are not considered | Dynamic | Yes | 4D path planning to increase search precision and prevent threats and obstructions | [29] |
| PPSwarm | Issues in tight passages (standard algorithms frequently struggle to quickly discover a viable path) | Height and energy efficiency are not addressed | Dynamic | Yes | Space with static barriers and small passageways | [30] |
| BINN-HHO | Efficiency issues in alpine situations, such as limited stability, long planned paths, and poor dynamic obstacle avoidance | Moving obstacles are not considered | Dynamic | Yes | The path is more prolonged, less stable, and has poor moving obstacle avoidance capability in hilly terrain | [31] |
| CL-DMSPSO | Obstacles during diverse task operations in complex situations | Communication between UAVs and ground control stations is not considered | Dynamic | Yes | Path length reduction and collision avoidance in complex environments | [32] |
| NSGA multi-objective EA | Coverage time, connectivity between drones, and data transmission to the ground control station | Unknown environments with flying items are not evaluated | Dynamic | No | Data collection, communication with the GCS, monitoring, and surveillance in a dynamic context | [33] |
| Algorithm Name | Low Time Consumption | Low Computational Cost | Low System Complexity | Fast Convergence Speed | Adaptability to Complex Environments | Smooth Path | Online Algorithm | Extensive Area Scalability | Obstacle Avoidance Capability | Reference |
|---|---|---|---|---|---|---|---|---|---|---|
| GA + MTSP | √ | × | × | √ | √ | × | × | √ | × | [40,41,42] |
| DPIO | × | × | √ | × | × | × | × | √ | × | [43] |
| CGWO | √ | √ | √ | √ | √ | × | × | √ | × | [44] |
| MMACO | × | √ | × | √ | √ | × | × | √ | √ | [45] |
| Improved PSO | × | × | × | √ | × | √ | × | × | √ | [46] |
| DQN + RRT | × | × | × | √ | √ | √ | √ | √ | √ | [47] |
| Deep Reinforcement Learning | √ | × | × | √ | √ | √ | √ | √ | √ | [12,48] |
| Reinforcement Learning | × | √ | √ | √ | √ | × | × | × | √ | [49,50] |
| Deep Reinforcement Learning | √ | × | × | √ | √ | × | √ | √- | × | [51,52,53] |
| IABC | √ | √ | √ | √ | √ | × | √ | × | √ | [54] |
| IAPF | × | × | × | √ | √ | × | × | √ | √ | [55] |
| MADDPG | √ | √ | √ | √ | √ | × | × | × | × | [56] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.; Sarkar, N.I.; Lutui, R. A Survey on Multi-UAV Path Planning: Classification, Algorithms, Open Research Problems, and Future Directions. Drones 2025, 9, 263. https://doi.org/10.3390/drones9040263
Rahman M, Sarkar NI, Lutui R. A Survey on Multi-UAV Path Planning: Classification, Algorithms, Open Research Problems, and Future Directions. Drones. 2025; 9(4):263. https://doi.org/10.3390/drones9040263
Chicago/Turabian StyleRahman, Mamunur, Nurul I. Sarkar, and Raymond Lutui. 2025. "A Survey on Multi-UAV Path Planning: Classification, Algorithms, Open Research Problems, and Future Directions" Drones 9, no. 4: 263. https://doi.org/10.3390/drones9040263
APA StyleRahman, M., Sarkar, N. I., & Lutui, R. (2025). A Survey on Multi-UAV Path Planning: Classification, Algorithms, Open Research Problems, and Future Directions. Drones, 9(4), 263. https://doi.org/10.3390/drones9040263