
Distributed Event-Triggered-Based Adaptive Formation Tracking Control for Multi-UAV Systems Under Fixed and Switched Topologies


Abstract
1. Introduction
2. Preliminaries and Problem Formulation
2.1. Notations and Preparatory Knowledge
2.2. Dynamic Model of UAVs
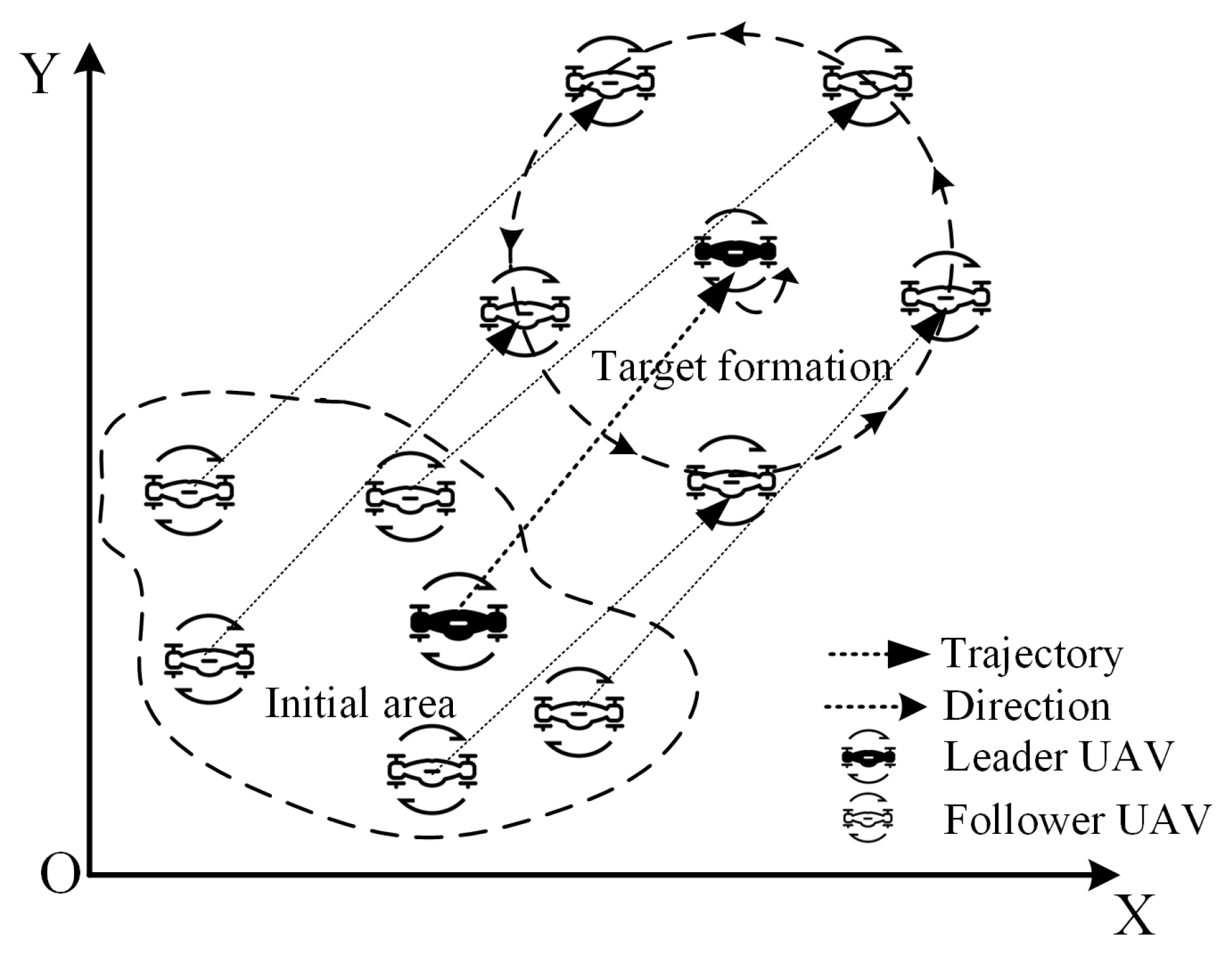
2.3. Problem Formulation
3. Main Results
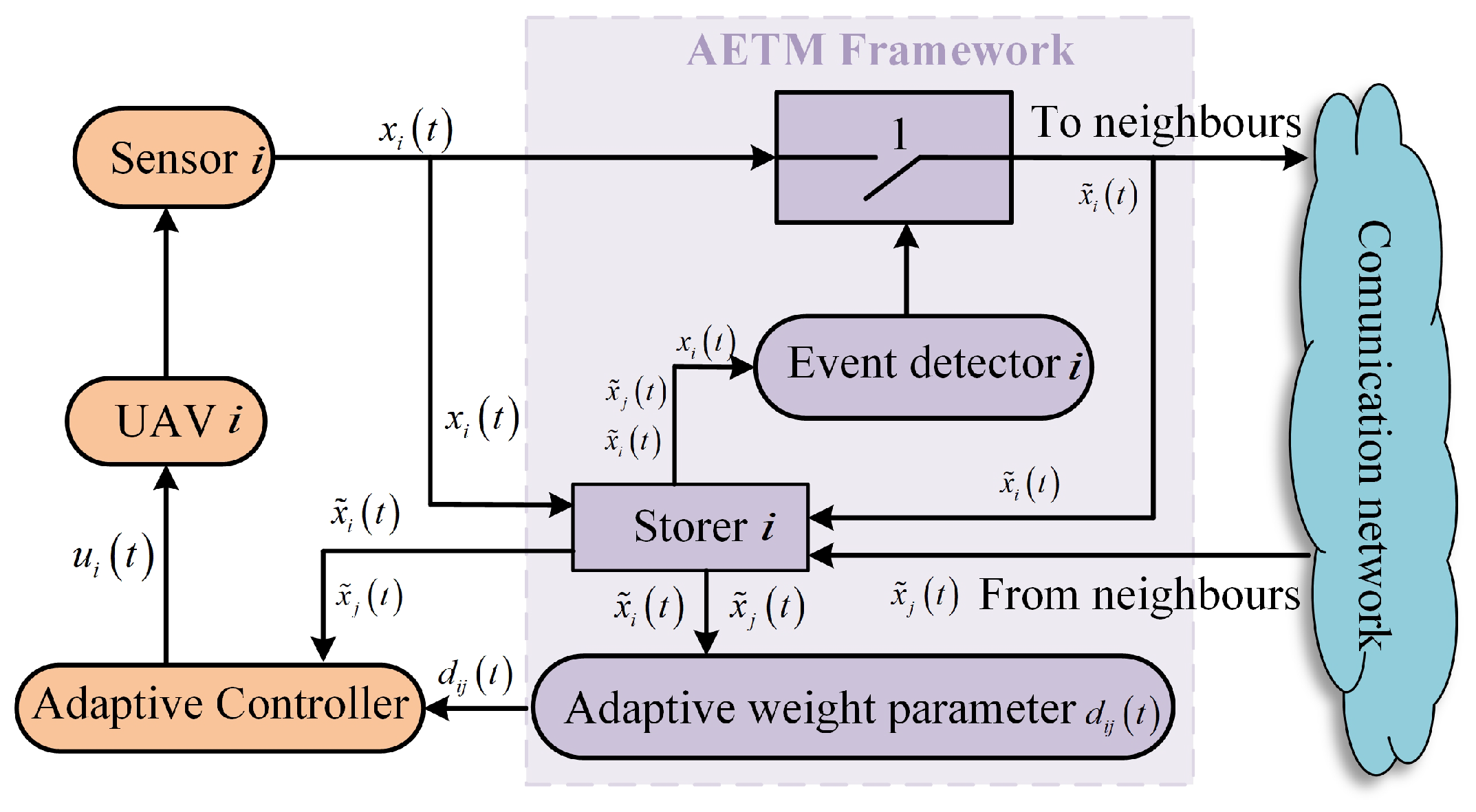
3.1. Adaptive Event-Triggered TVFT Control Under Fixed Topology
| Algorithm 1 Design of AETM-based TVFT consensus protocol in fixed topology. |
|
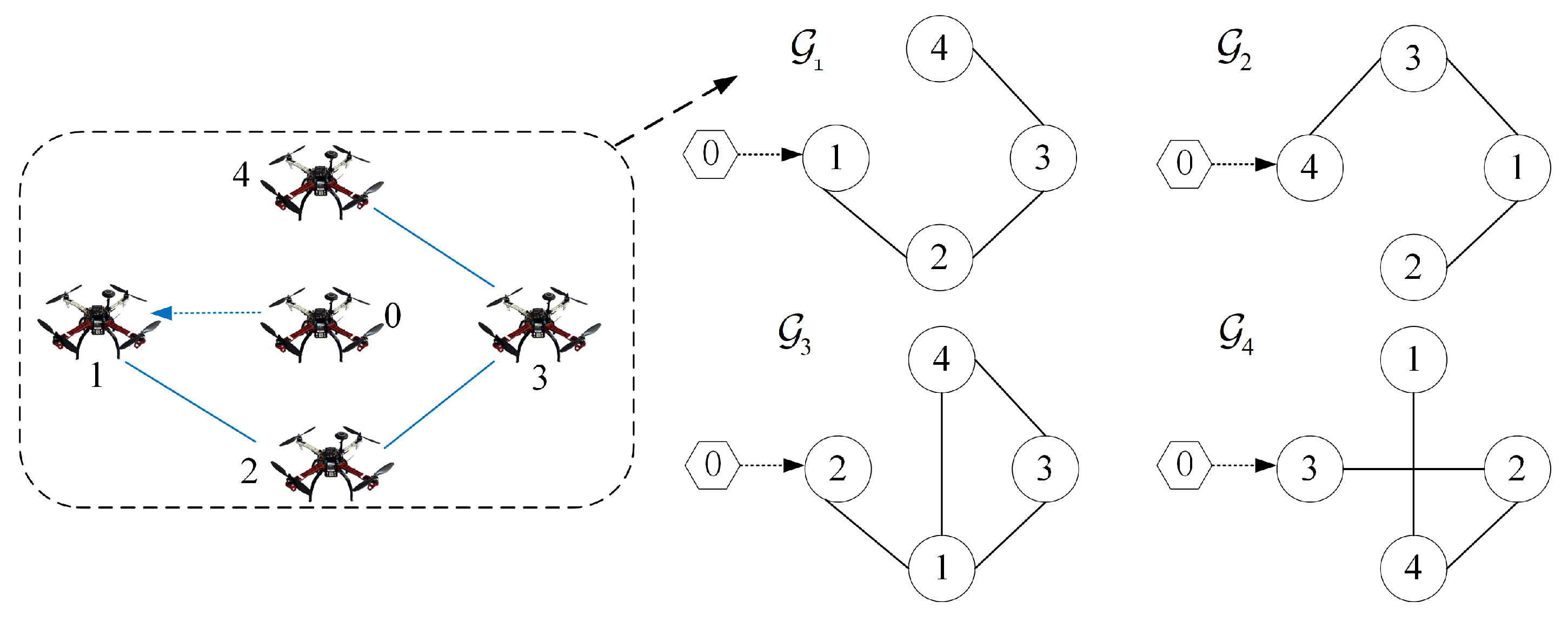
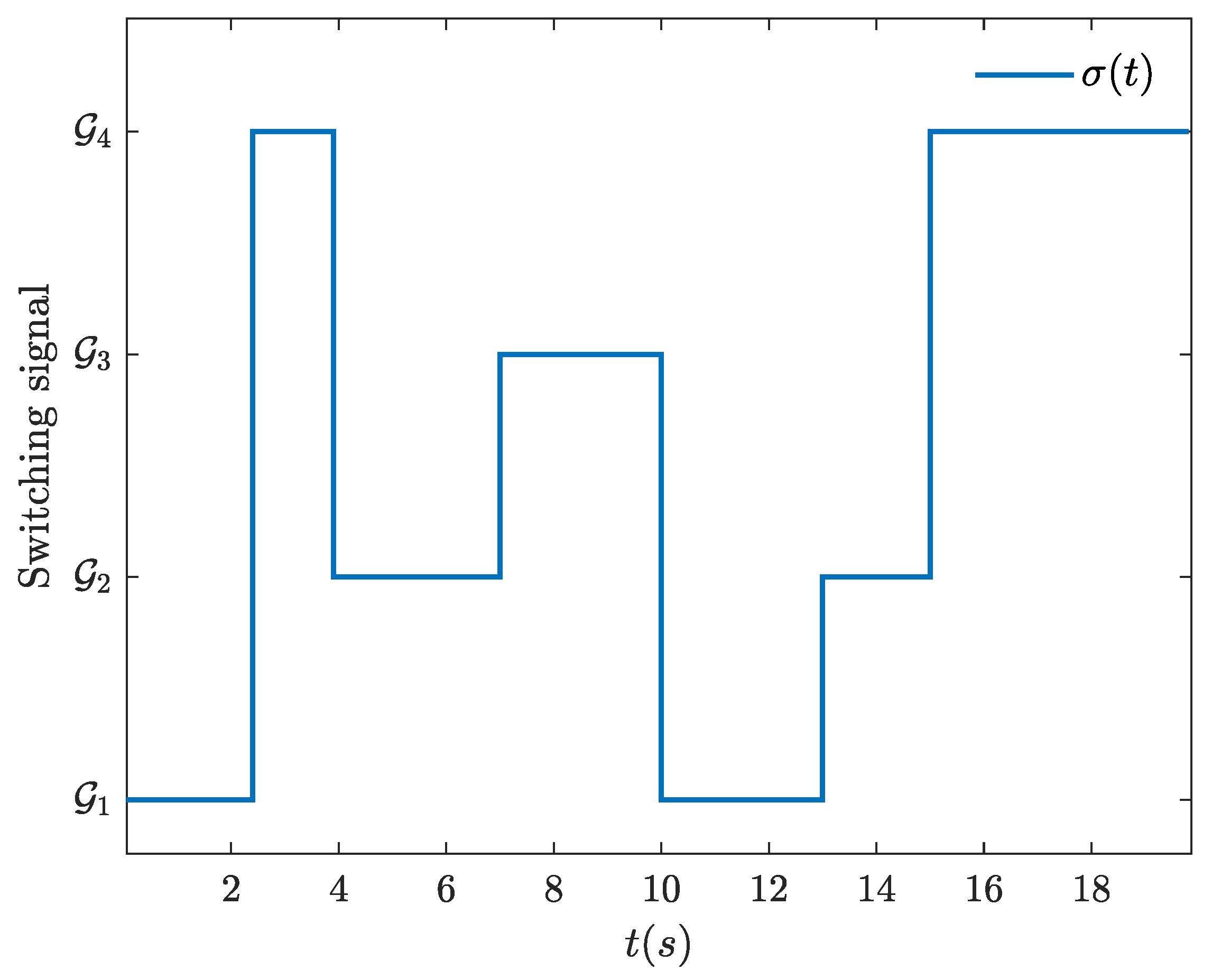
3.2. Adaptive Event-Triggered TVFT Control Under Switching Topology
| Algorithm 2: Design of AETM-based TVFT consensus protocol in switching topology |
|
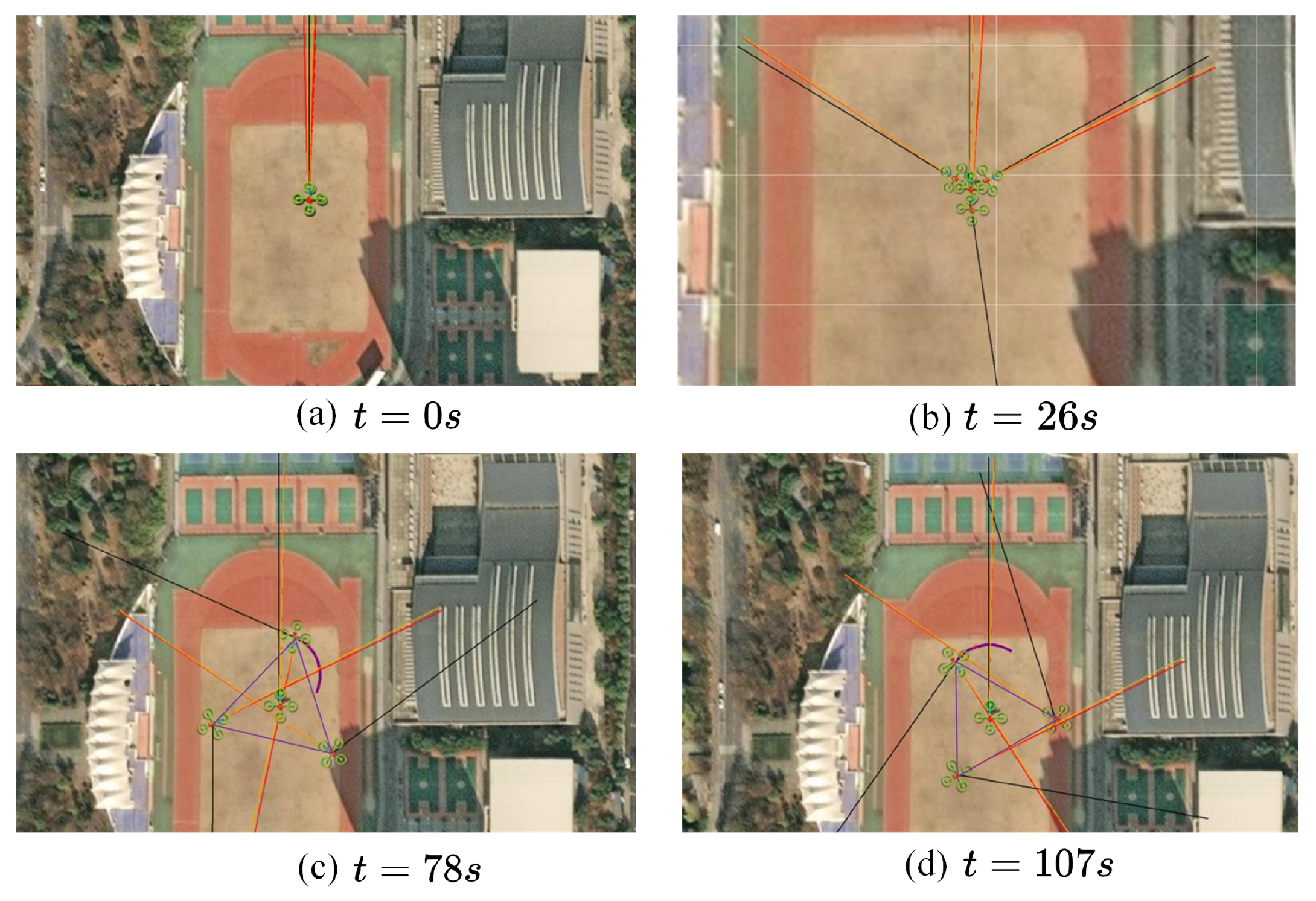
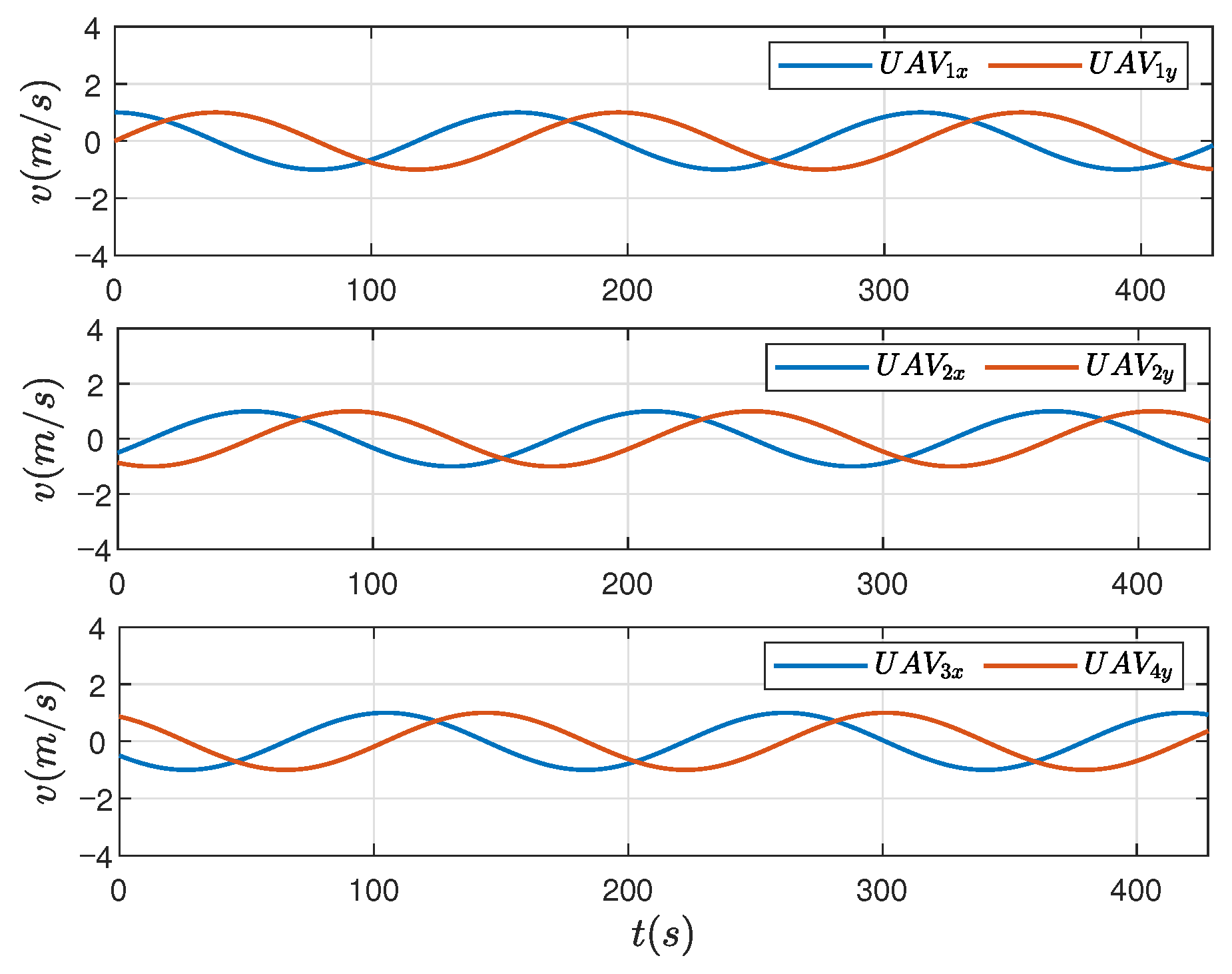
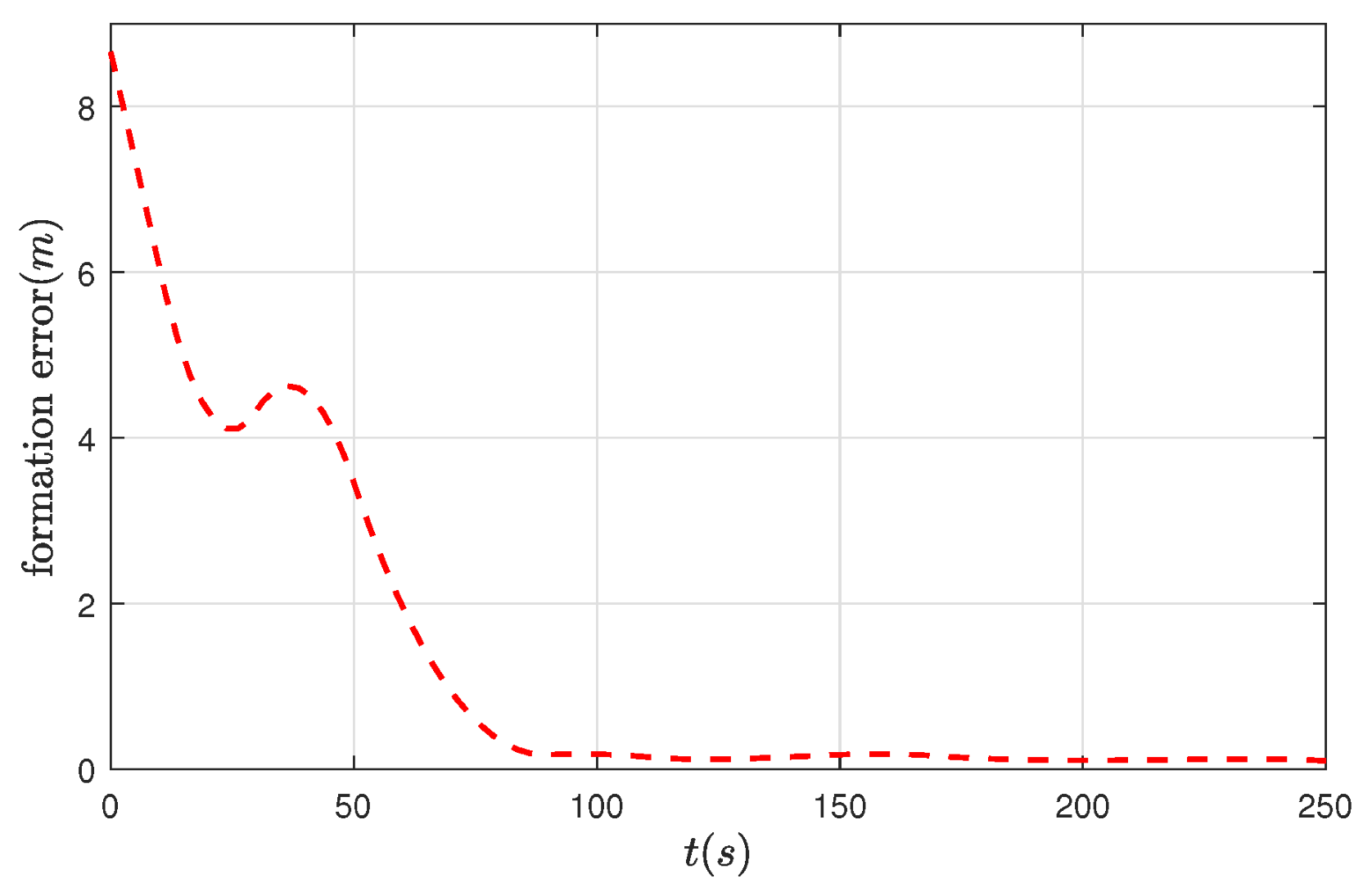
4. Example and Experimental Results
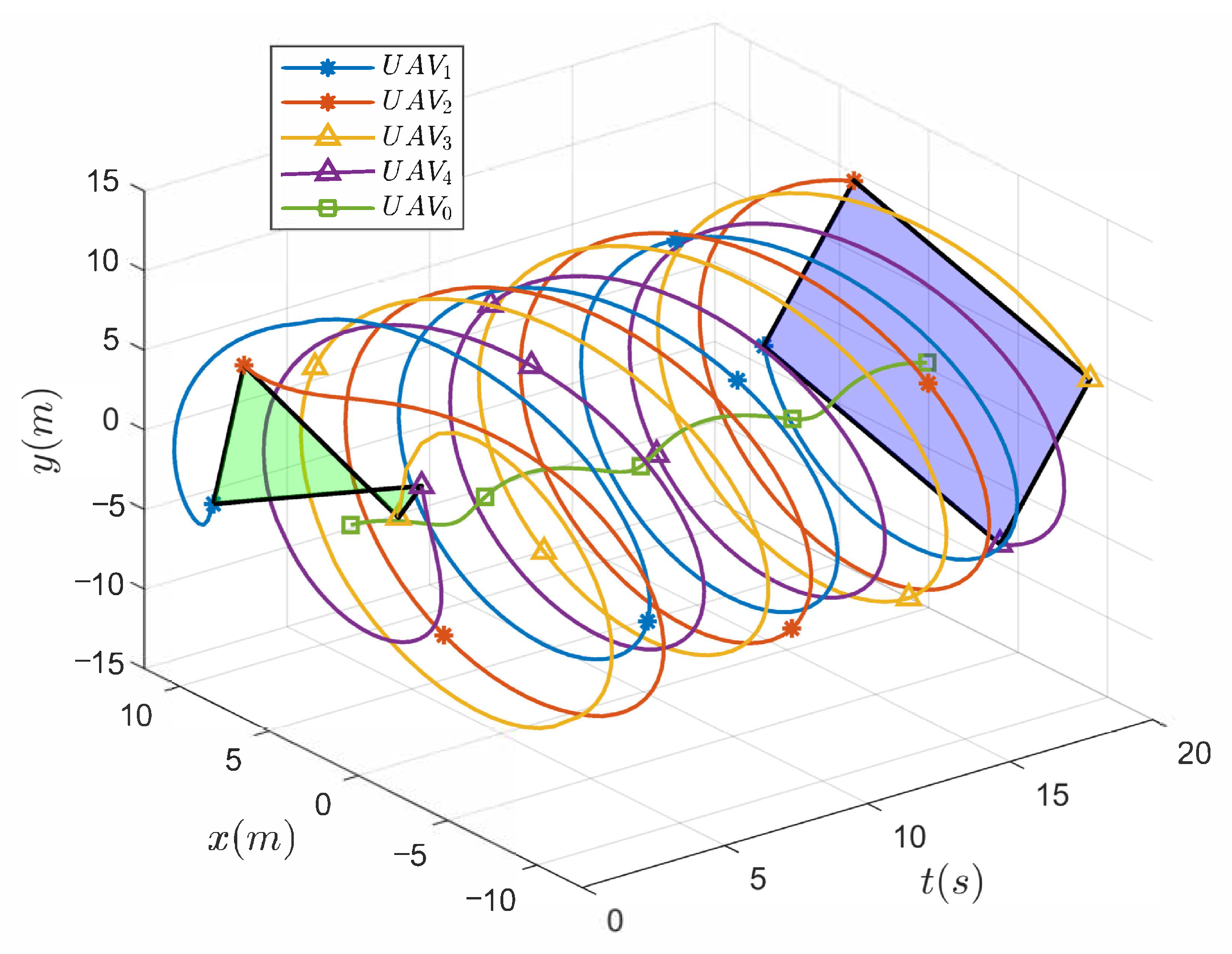
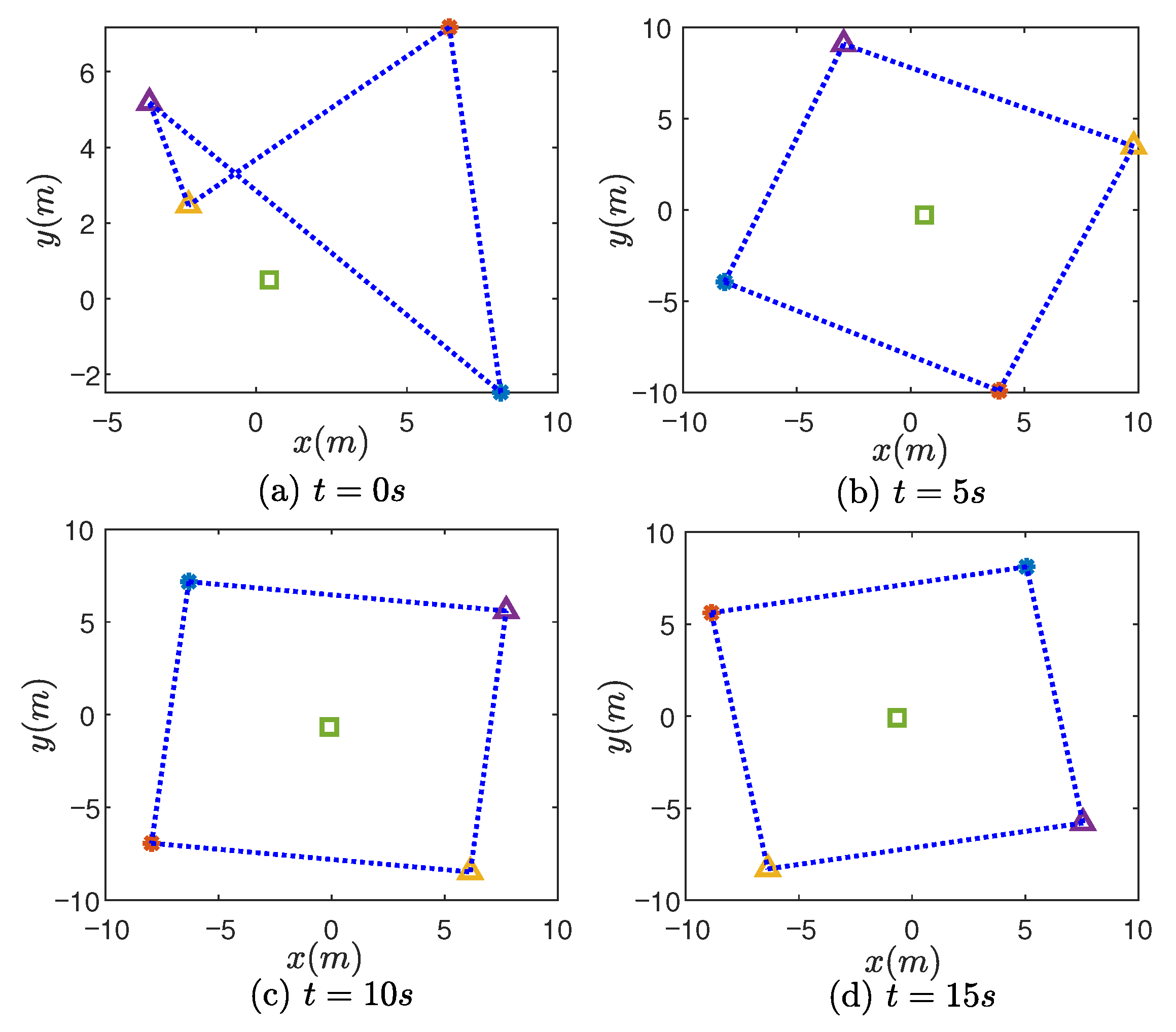
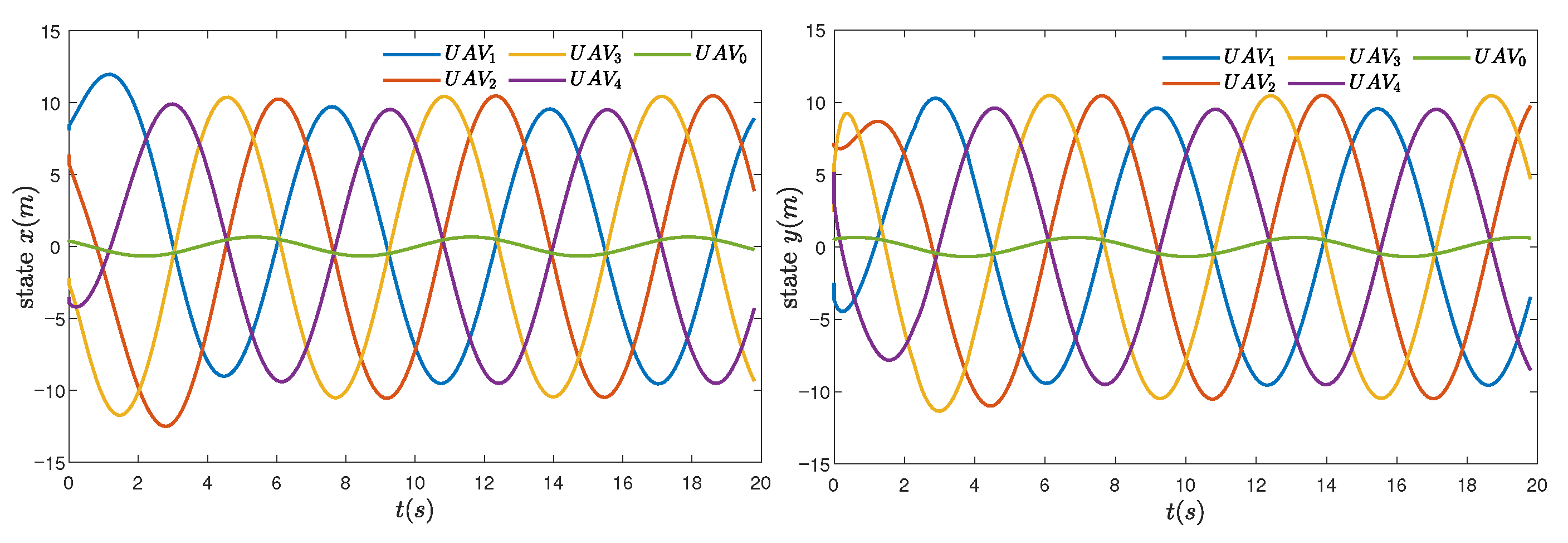
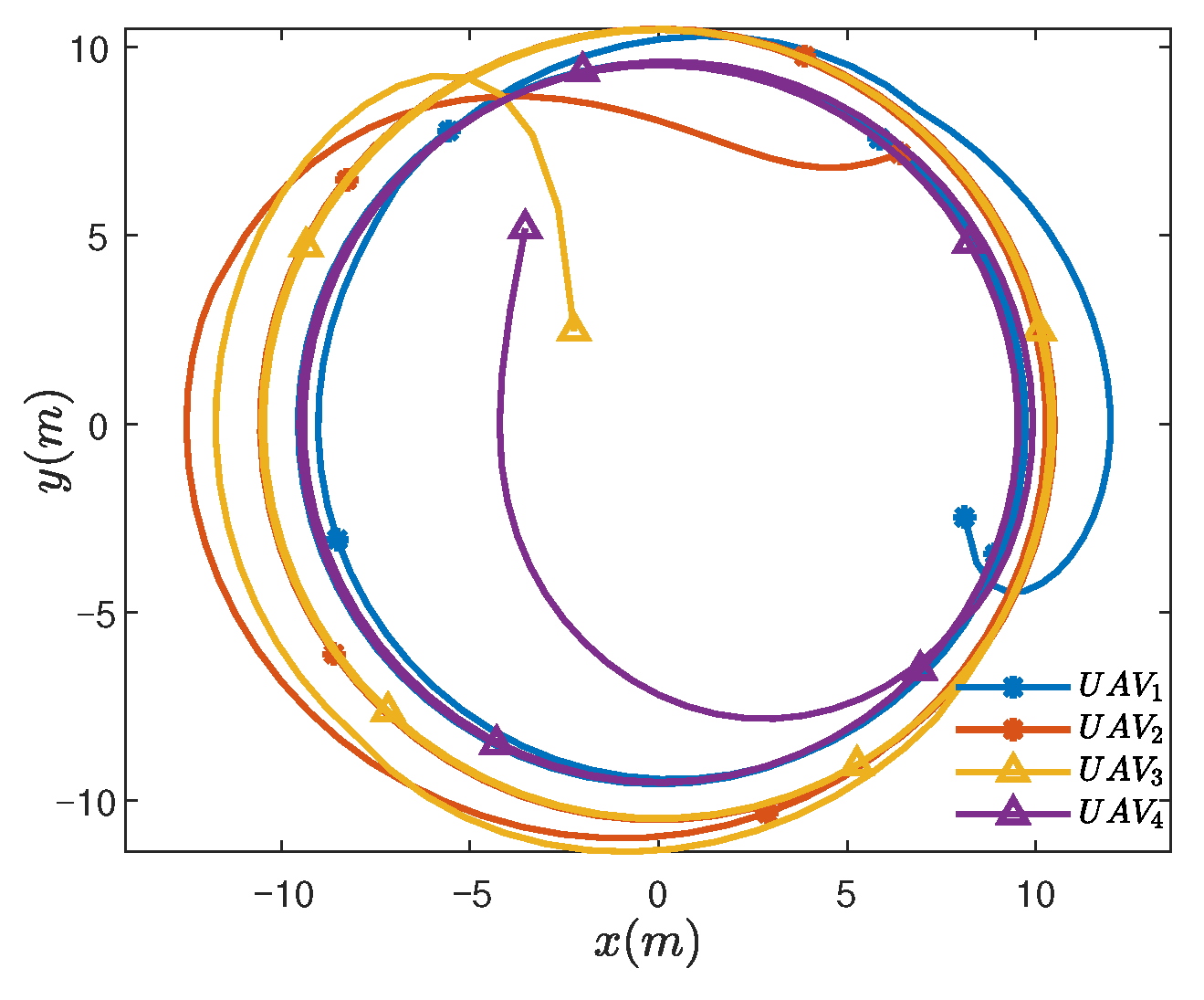
4.1. Formation-Tracking Simulation Experiments and Results
4.2. Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, J.; Zhang, J.; Wang, Z.; Liu, X.; Zhou, S.; Shi, G.; Shi, Z. Formation cooperative intelligent tactical decision making based on bayesian network model. Drones 2024, 8, 427. [Google Scholar] [CrossRef]
- Zou, Y.; An, Q.; Miao, S.; Chen, S.; Wang, X.; Su, H. Flocking of uncertain nonlinear multi-agent systems via distributed adaptive event-triggered control. Neurocomputing 2021, 465, 503–513. [Google Scholar]
- Liang, H.; Zhang, L.; Sun, Y.; Huang, T. Containment control of semi-Markovian multiagent systems with switching topologies. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3889–3899. [Google Scholar]
- Roman-Figueroa, C.; Bravo, L.; Paneque, M.; Navia, R.; Cea, M. Chemical products for crop protection against freezing stress: A review. J. Agron. Crop Sci. 2021, 207, 391–403. [Google Scholar]
- Ouyang, Q.; Wu, Z.; Cong, Y.; Wang, Z. Formation control of unmanned aerial vehicle swarms: A comprehensive review. Asian J. Control 2022, 25, 570–593. [Google Scholar]
- Tang, X.; Yu, J.; Li, X.; Dong, X.; Ren, Z. Distributed formation control with obstacle avoidance for multiple underactuated unmanned surface vehicles. J. Frankl. Inst. 2024, 12, 107008. [Google Scholar]
- Yang, S.; Yu, W.; Liu, Z.; Ma, F. A robust hybrid iterative learning formation strategy for multi-unmanned aerial vehicle systems with multi-operating modes. Drones 2024, 8, 406. [Google Scholar] [CrossRef]
- Xia, L.; Li, Q.; Song, R.; Zhang, Z. Leader-follower time-varying output formation control of heterogeneous systems under cyber attack with active leader. Inf. Sci. 2022, 585, 24–40. [Google Scholar]
- Yang, Y.; Xiong, X.; Yan, Y. UAV formation trajectory planning algorithms: A review. Drones 2024, 7, 62. [Google Scholar]
- Wen, J.; Yang, J.; Li, Y.; He, J.; Li, Z.; Song, H. Behavior-based formation control digital twin for multi-AUG in edge computing. IEEE Trans. Netw. Sci. Eng. 2023, 10, 2791–2801. [Google Scholar]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2021, 55, 3897–3935. [Google Scholar]
- Zhang, P.; Xue, H.; Gao, S.; Zhang, J. Distributed adaptive consensus tracking control for multi-agent system with communication constraints. IEEE Trans. Parallel Distrib. Syst. 2021, 32, 1293–1306. [Google Scholar]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar]
- Chang, Z.; Xue, H.; Liang, H.; Zhang, P. Time-varying formation control for nonlinear multi-agent systems against actuator attacks. J. Frankl. Inst. 2022, 359, 11068–11088. [Google Scholar]
- Liang, H.; Cheng, W. Adaptive Formation Regulation for Multi-agent Systems with Structure Uncertainties via Variable Recombination. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; IEEE: Piscataway, NJ, USA, 2021; pp. 5873–5878. [Google Scholar]
- Yan, C.; Zhang, W.; Guo, H.; Zhu, F.; Qian, Y. Distributed adaptive time-varying formation control for Lipschitz nonlinear multi-agent systems. Trans. Inst. Meas. Control 2021, 44, 272–285. [Google Scholar]
- Lippay, Z.S.; Hoagg, J.B. Formation control with time-varying formations, bounded controls, and local collision avoidance. IEEE Trans. Control Syst. Technol. 2021, 30, 261–276. [Google Scholar]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Trans. Control Syst. Technol. 2015, 23, 340–348. [Google Scholar]
- Wang, J.; Han, L.; Li, X.; Dong, X.; Li, Q.; Ren, Z. Time-varying formation of second-order discrete-time multi-agent systems under non-uniform communication delays and switching topology with application to UAV formation flying. IET Control Theory Appl. 2020, 14, 1947–1956. [Google Scholar]
- Wang, J.H.; Xu, Y.L.; Zhang, J.; Yang, D.D. Time-varying formation for general linear multi-agent systems via distributed event-triggered control under switching topologies. Chin. Phys. B 2018, 27, 040504. [Google Scholar]
- Sun, L.; Liu, X.; Tan, W.; Deng, Y.; Jiao, J.; Zhao, M. Predictive state observer-based aircraft distributed formation tracking considering input delay and saturations. Drones 2024, 8, 23. [Google Scholar] [CrossRef]
- Cao, H.; Han, L.; Li, D.; Hu, Q. Fully distributed dynamic event-triggering formation control for multi-agent systems under DoS attacks: Theory and experiment. Neurocomputing 2023, 552, 126546. [Google Scholar]
- Li, Q.; Hua, Y.; Dong, X.; Ren, Z. Time-varying formation tracking control for unmanned aerial vehicles: Theories and applications. IFAC PapersOnLine 2022, 55, 49–54. [Google Scholar]
- Wang, Y.; Lei, Y.; Bian, T.; Guan, Z. Distributed control of nonlinear multiagent systems with unknown and nonidentical control directions via event-triggered communication. IEEE Trans. Cybern. 2020, 50, 1820–1832. [Google Scholar] [PubMed]
- Liu, C.; Liu, L.; Cao, J.; Abdel-Aty, M. Intermittent event-triggered optimal leader-following consensus for nonlinear multi-agent systems via actor-critic algorithm. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 3992–4006. [Google Scholar]
- Guo, X.; Wang, B.; Wang, J.; Wu, Z.; Guo, L. Adaptive event-triggered PIO-based anti-disturbance fault-tolerant control for MASs With process and sensor faults. IEEE Trans. Netw. Sci. Eng. 2024, 11, 77–88. [Google Scholar]
- Hu, W.; Yang, C.; Huang, T.; Gui, W. A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks. IEEE Trans. Cybern. 2020, 50, 869–874. [Google Scholar]
- Ding, C.; Zhang, Z.; Zhang, J. Dynamics event-triggered-based time-varying bearing formation Control for UAVs. Drones 2024, 8, 185. [Google Scholar] [CrossRef]
- Li, W.; Zhang, H.; Wang, W.; Cao, Z. Fully distributed event-triggered time-varying formation control of multi-agent systems subject to mode-switching denial-of-service attacks. Appl. Math. Comput. 2022, 414, 126645. [Google Scholar]
- Li, M.; Zhang, W.; Yan, C.; Hu, Z. Observer-based bipartite formation control for MASs with external disturbances under event-triggered scheme. IEEE Trans. Circuits Syst. II Express Br. 2022, 69, 1178–1182. [Google Scholar]
- Li, X.; Chen, M.Z.Q.; Su, H.; Li, C. Distributed bounds on the algebraic connectivity of graphs with application to agent networks. IEEE Trans. Cybern. 2017, 47, 2121–2131. [Google Scholar]
- Xia, L.; Li, Q.; Song, R. Adaptive event-triggered average tracking control with activable event-triggering mechanisms. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6067–6079. [Google Scholar]
- Xu, M.; Li, M.; Hao, F. Fully distributed optimization of second-order systems with disturbances based on event-triggered control. Asian J. Control 2023, 25, 3715–3728. [Google Scholar]
- Li, X.; Dong, X.; Li, Q.; Ren, Z. Event-triggered time-varying formation control for general linear multi-agent systems. J. Frankl. Inst. 2019, 356, 10179–10195. [Google Scholar]
- Deng, J.; Li, K.; Wu, S.; Wen, Y. Distributed adaptive time-varying formation tracking control for general linear multi-agent systems based on event-triggered strategy. IEEE Access 2020, 8, 13204–13217. [Google Scholar]
- Dou, L.; Cai, S.; Zhang, X.; Su, X.; Zuang, R. Event-triggered-based adaptive dynamic programming for distributed formation control of multi-UAV. J. Frankl. Inst. 2022, 359, 3671–3691. [Google Scholar]
- Wu, Z.; Xu, Y.; Lu, R.; Wu, Y.; Huang, T. Event-triggered control for consensus of multiagent systems with fixed/switching topologies. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1736–1746. [Google Scholar]
- Huang, J.; Chen, L.; Xie, X.; Wang, M.; Xu, B. Distributed event-triggered consensus control for heterogeneous multi-agent systems under fixed and switching topologies. Int. J. Control Autom. Syst. 2019, 17, 1945–1956. [Google Scholar]
- Zhang, J.; Zhang, H.; Gao, Z.; Sun, S. Time-varying formation control with general linear multi-agent systems by distributed event-triggered mechanisms under fixed and switching topologies. Neural Comput. Appl. 2022, 34, 4277–4294. [Google Scholar]
- Li, Y.; Liu, X.; Liu, H.; Du, C.; Lu, P. Distributed dynamic event-triggered consensus control for multi-agent systems under fixed and switching topologies. J. Frankl. Inst. 2021, 358, 4348–4372. [Google Scholar]
- Hua, Y.; Dong, X.; Li, Q.; Ren, Z. Distributed adaptive formation tracking for heterogeneous multiagent systems with multiple nonidentical leaders and without well-informed follower. Int. J. Robust Nonlinear Control 2020, 30, 2131–2151. [Google Scholar]
- Song, W.; Feng, J.; Zhang, H.; Xu, X. Event-based formation control of heterogeneous multiagent systems with leader agent of nonzero input. Inf. Sci. 2022, 598, 157–181. [Google Scholar]
- Hua, Y.; Dong, X.; Hu, G.; Li, Q.; Ren, Z. Distributed time-varying output formation tracking for heterogeneous linear multiagent systems with a nonautonomous leader of unknown input. IEEE Trans. Autom. Control 2019, 64, 4292–4299. [Google Scholar]
- Zhang, J.; Zhang, H.; Sun, S.; Cai, Y. Adaptive time-varying formation tracking control for multiagent systems with nonzero leader input by intermittent communications. IEEE Trans. Cybern. 2022, 53, 5706–5715. [Google Scholar]
- Zhang, X.; Wu, J.; Zhan, X.; Han, T.; Yan, H. Event-triggered adaptive time-varying formation tracking of multi-agent system with a leader of nonzero input. IEEE Trans. Circuits Syst. II Express Br. 2023, 70, 6. [Google Scholar]
- Wang, R.; Dong, X.; Li, Q.; Zhang, R. Distributed adaptive control for time-varying formation of general linear multi-agent systems. Int. J. Syst. Sci. 2017, 48, 3491–3503. [Google Scholar]
- Yang, D.; Ren, W.; Liu, X.; Chen, W. Decentralized event-triggered consensus for linear multi-agent systems under general directed graphs. Automatica 2016, 69, 242–249. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Scheme | Triggering Event Count | Convergence Time |
|---|---|---|
| AETM | 100 | |
| Static ETM [38] | 227 | |
| Adaptive strategy [46] | Continuous updating |
| Fully Distributed AETM | Decentralized ETM in [47] | Distributed ETM in [20] | |
|---|---|---|---|
| UAV1 | 12 | 82 | 25 |
| UAV2 | 24 | 74 | 50 |
| UAV3 | 12 | 67 | 72 |
| UAV4 | 52 | 63 | 108 |
| Triggering event count sum | 100 | 286 | 165 |
| Convergence time | 2.3 | 7.9 | 4.6 |
| Performance Index | AETM | Time-Delay | Disturbance | Time-Delay and Disturbance |
|---|---|---|---|---|
| Triggering event count | 100 | 109 | 106 | 113 |
| Convergence time | 2.30 | 2.49 | 2.38 | 2.58 |
| Parameter | Value |
|---|---|
| MP-GCS version | |
| UAV model | Quadrotor |
| Flight control software | Ardupilot Mega 3.6.11 |
| Data transmission protocol | |
| Baud rate of serial port | 115,200 HZ |
| Number of quadrotors | 4 |
| Flight altitude | 4 m |
| Vehicle_airspeed | 1 m/s |
| Initial location | (0 m, 0 m, 0 m) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, C.; Liu, L.; Li, L.; Yan, D. Distributed Event-Triggered-Based Adaptive Formation Tracking Control for Multi-UAV Systems Under Fixed and Switched Topologies. Drones 2025, 9, 259. https://doi.org/10.3390/drones9040259
Liang C, Liu L, Li L, Yan D. Distributed Event-Triggered-Based Adaptive Formation Tracking Control for Multi-UAV Systems Under Fixed and Switched Topologies. Drones. 2025; 9(4):259. https://doi.org/10.3390/drones9040259
Chicago/Turabian StyleLiang, Chengqing, Lei Liu, Lei Li, and Dongmei Yan. 2025. "Distributed Event-Triggered-Based Adaptive Formation Tracking Control for Multi-UAV Systems Under Fixed and Switched Topologies" Drones 9, no. 4: 259. https://doi.org/10.3390/drones9040259
APA StyleLiang, C., Liu, L., Li, L., & Yan, D. (2025). Distributed Event-Triggered-Based Adaptive Formation Tracking Control for Multi-UAV Systems Under Fixed and Switched Topologies. Drones, 9(4), 259. https://doi.org/10.3390/drones9040259