
Research on the Inversion Method of Dust Content on Mining Area Plant Canopies Based on UAV-Borne VNIR Hyperspectral Data

 ,
,
Abstract
1. Introduction
2. Materials and Methods
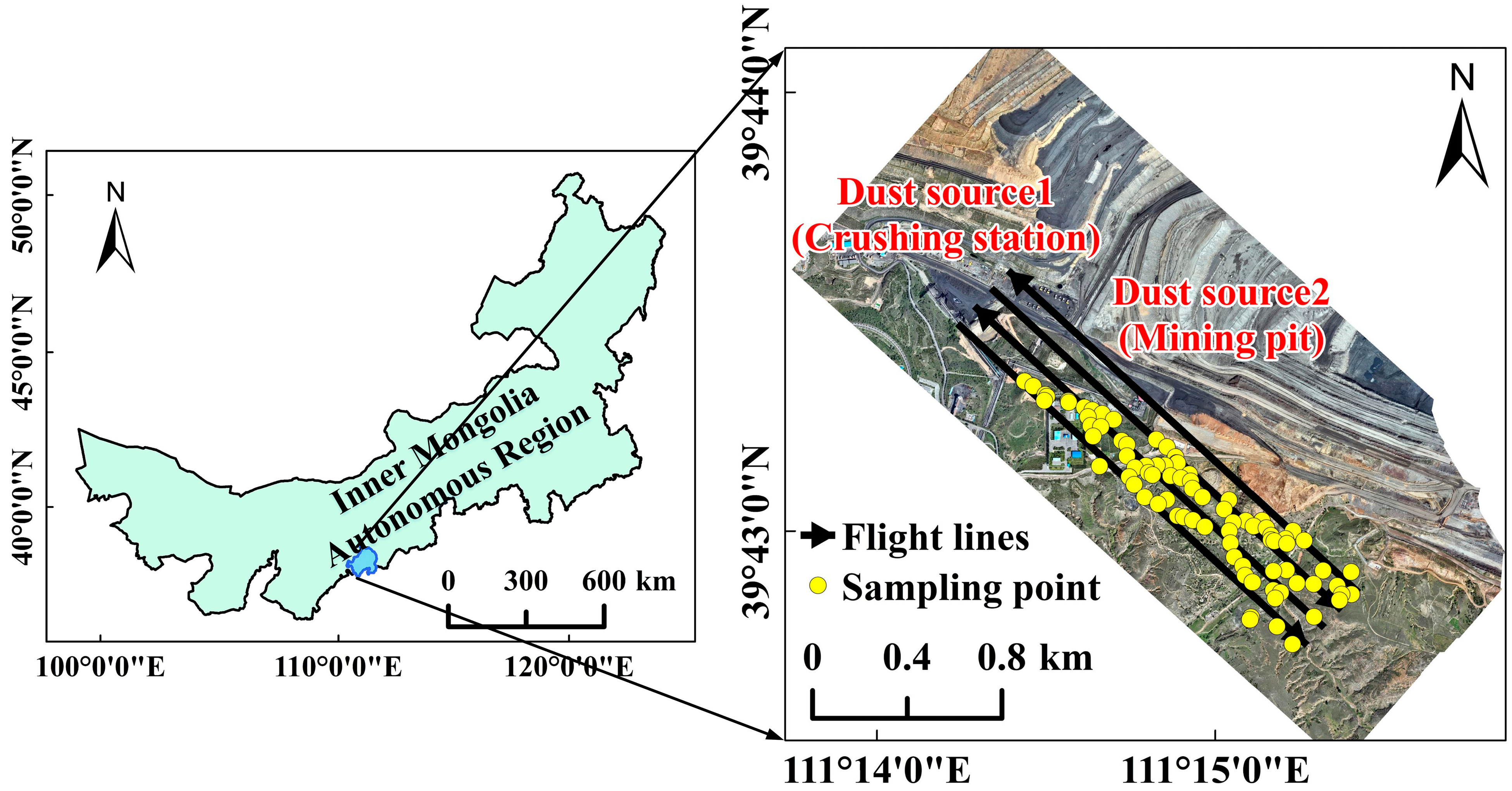
2.1. Study Area
2.2. Canopy Dust Content Measurement
2.3. UAV-Borne VNIR Hyperspectral Image Collection and Processing
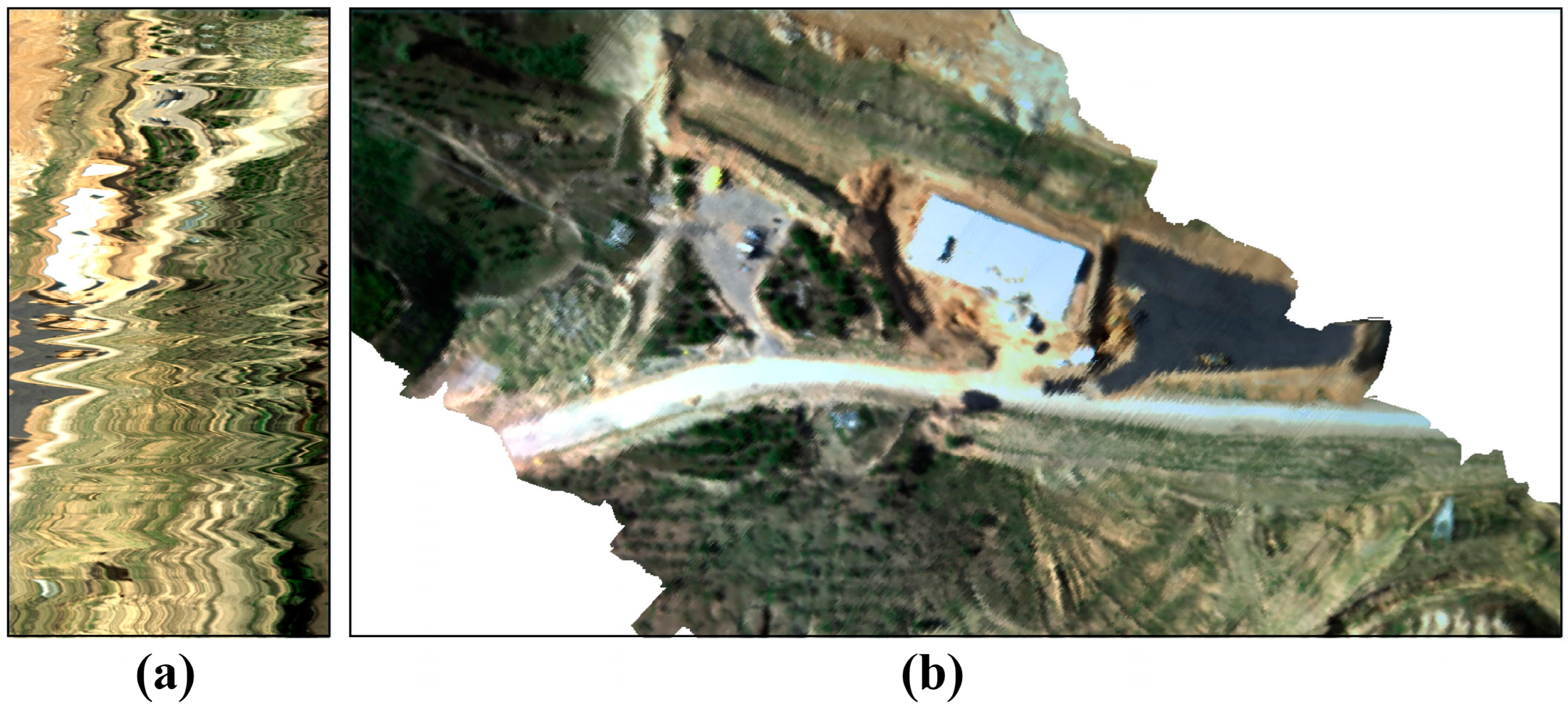
2.3.1. Geometric Correction
2.3.2. Radiometric Correction
- (1)
- Radiometric calibration
- (2)
- Atmospheric correction
- (3)
- BRDF correction
2.4. Spectral Transformation and Characteristic Bands Selection
2.5. Model Construction and Evaluation
3. Results
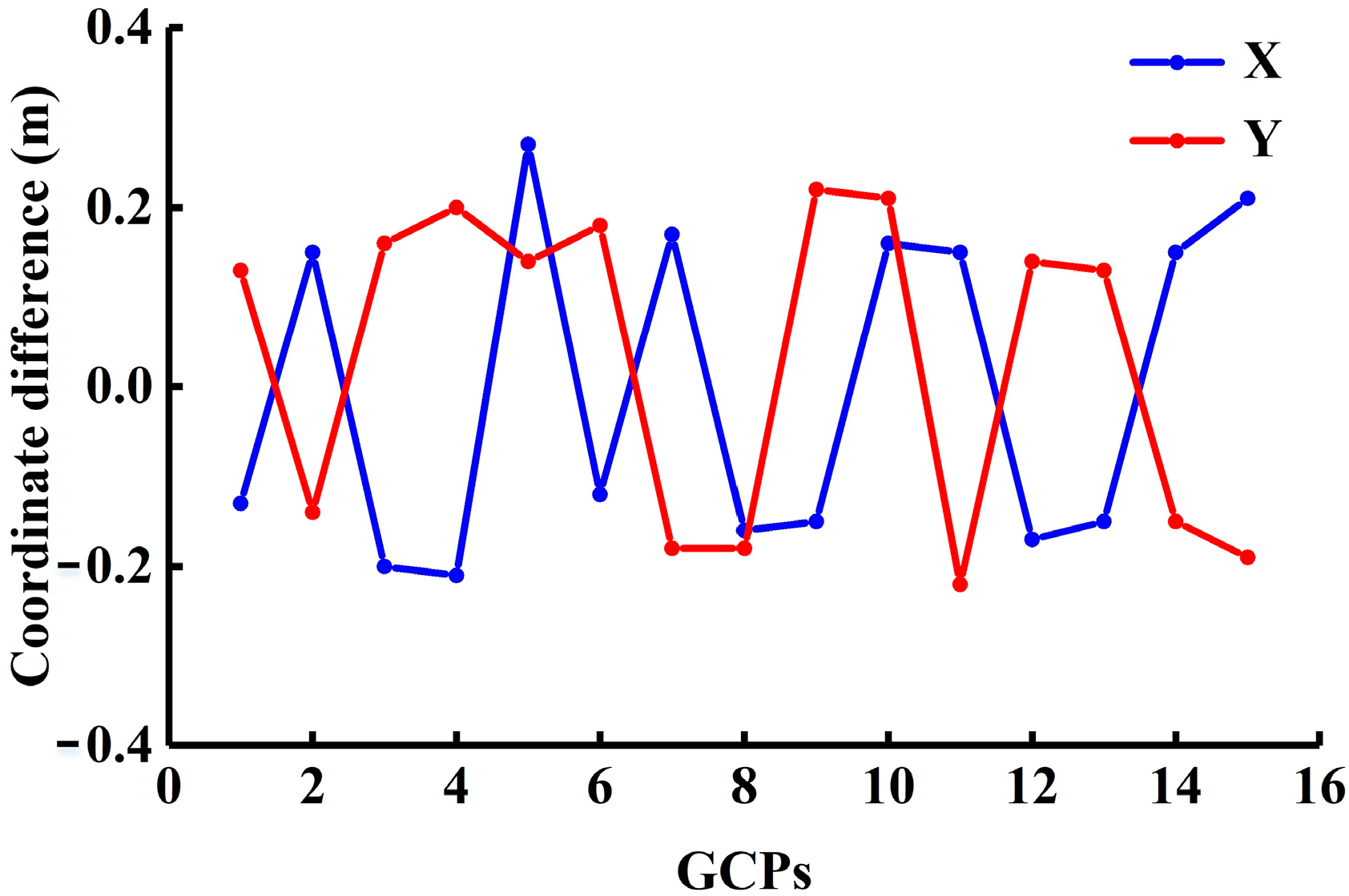
3.1. Evaluation of Geometric Correction for UAV-Borne VNIR Hyperspectral Data
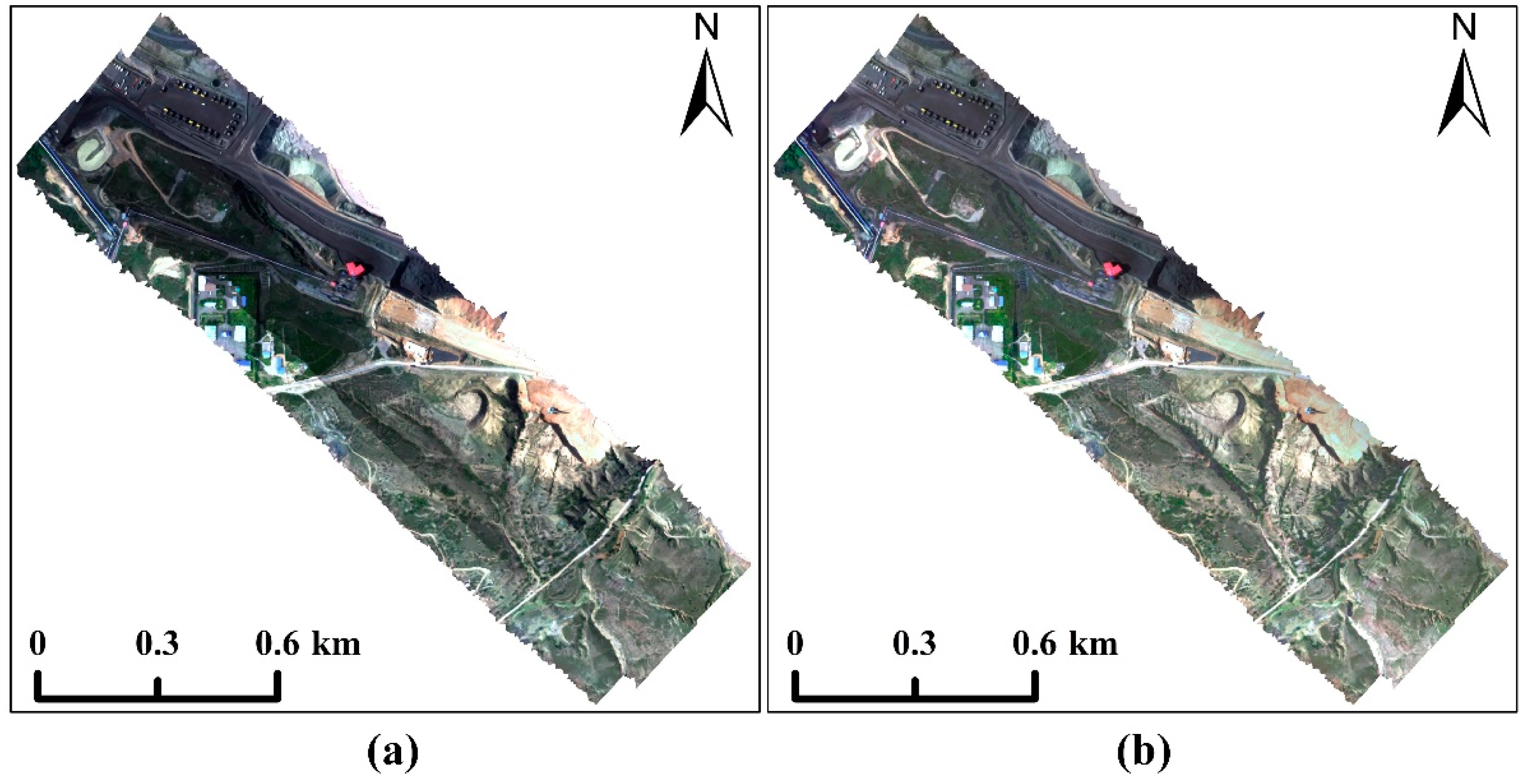
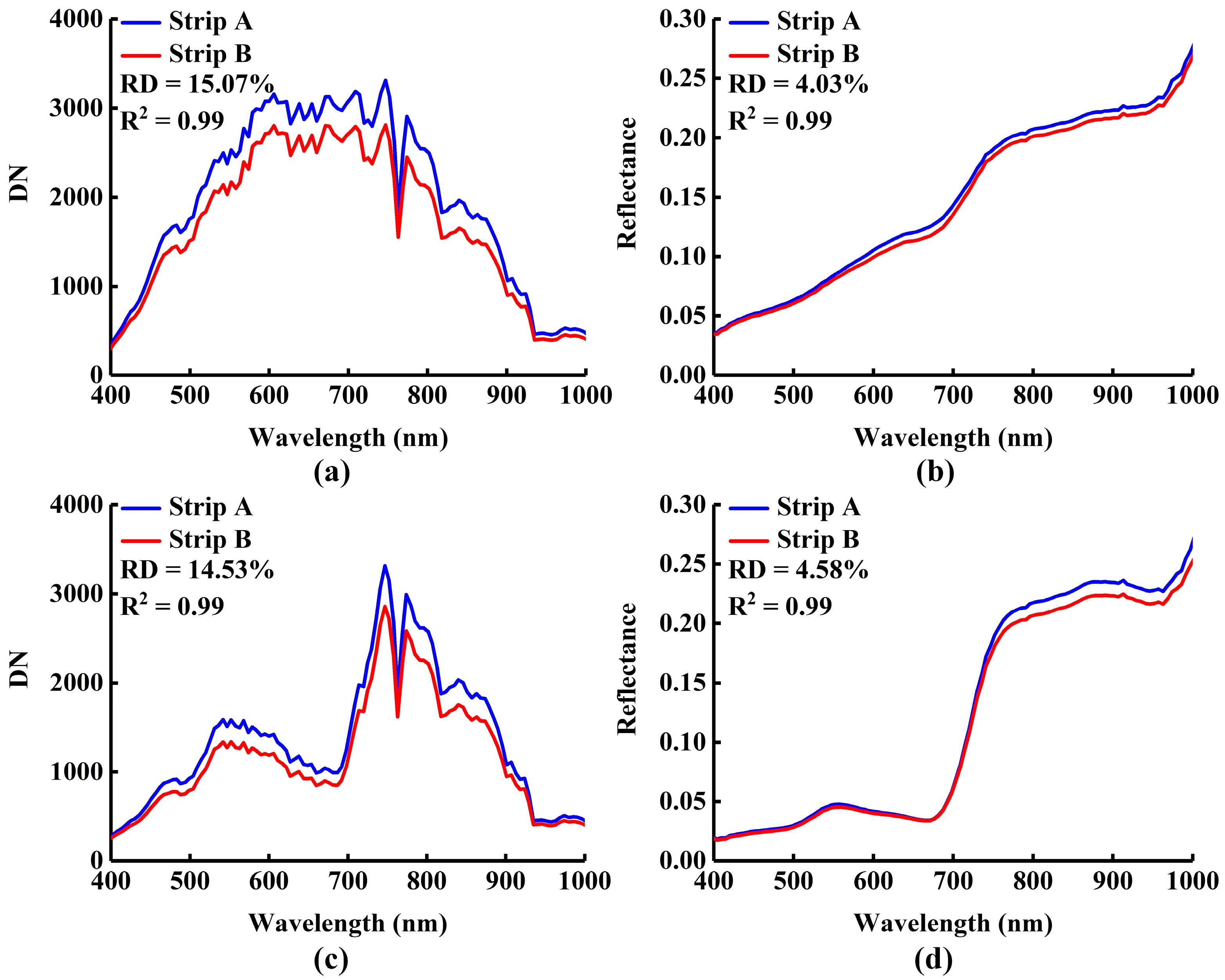
3.2. Evaluation of Radiometric Correction for UAV-Borne VNIR Hyperspectral Data
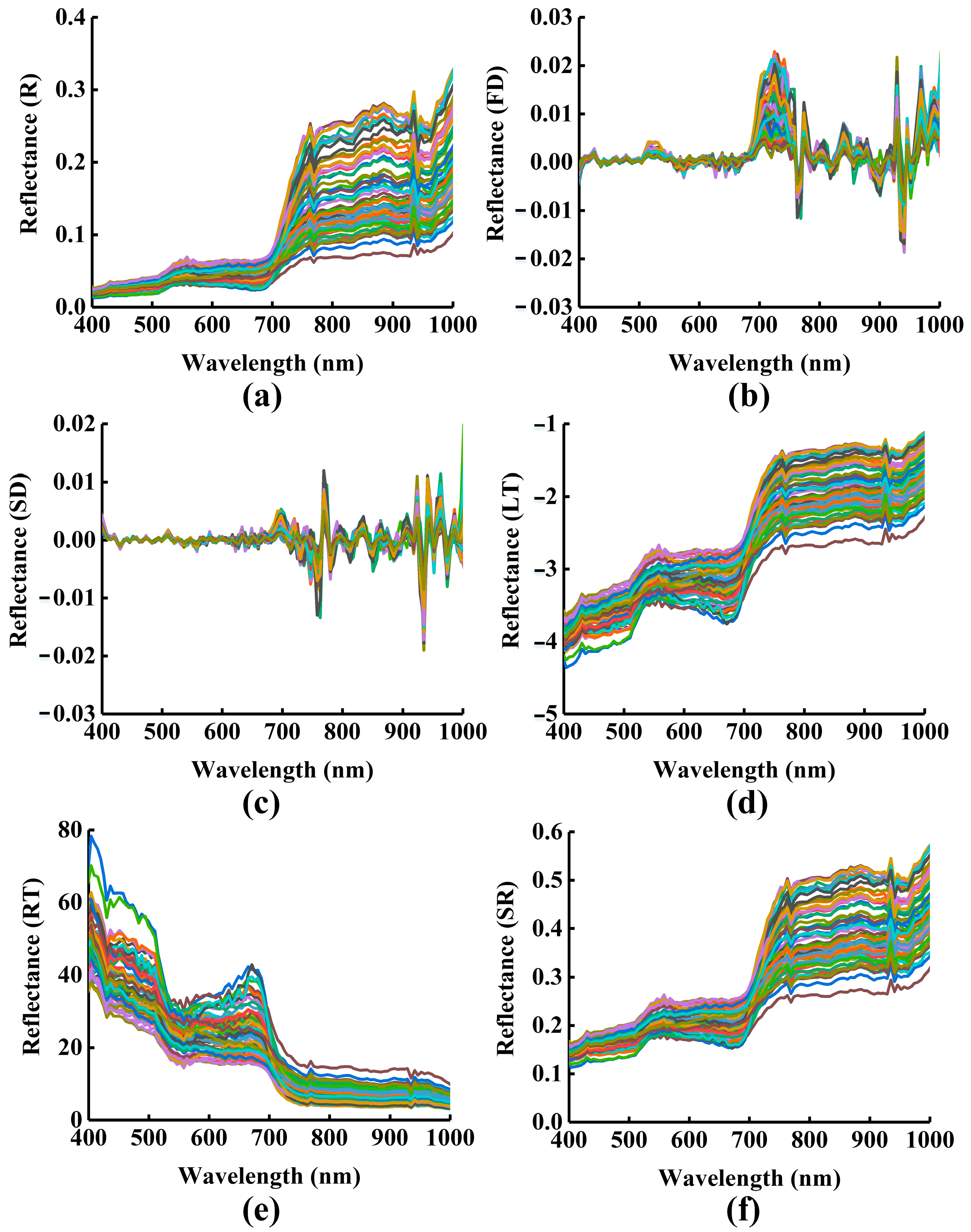
3.3. Feature Analysis Before and After Spectral Transformation
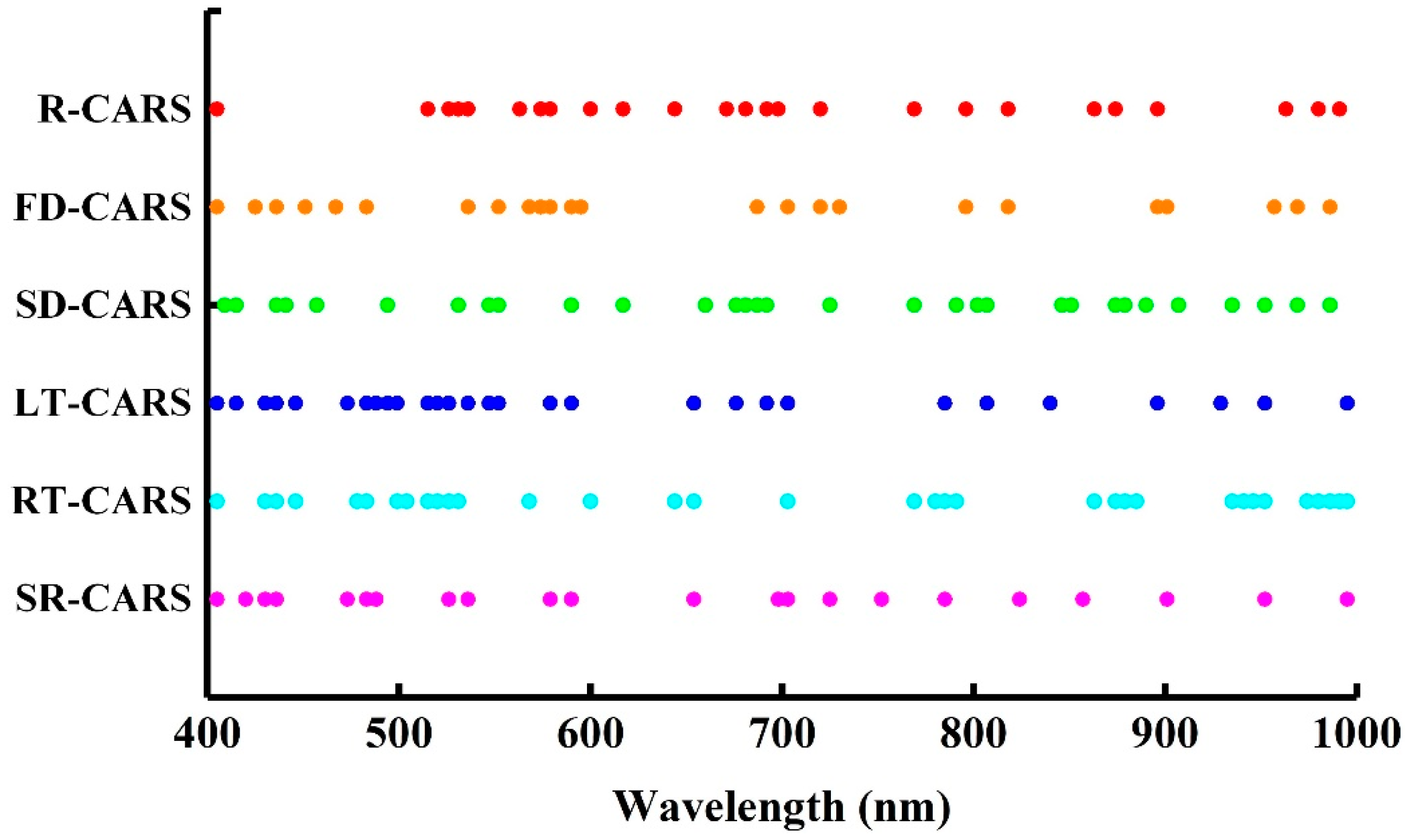
3.4. Characteristic Band Selection
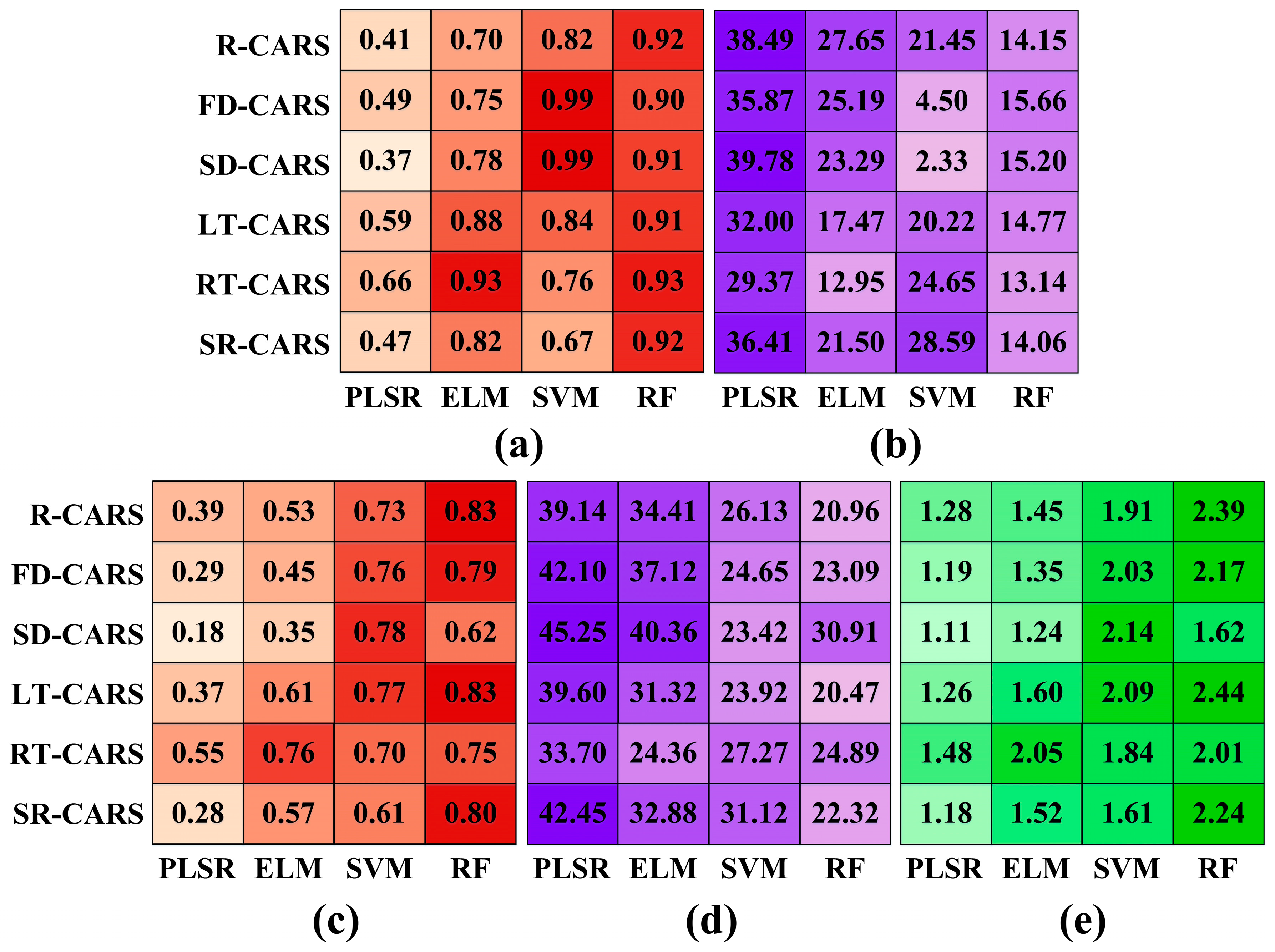
3.5. Construction of the Canopy Dust Content Inversion Model
4. Discussion
4.1. Experimental Accuracy Analysis
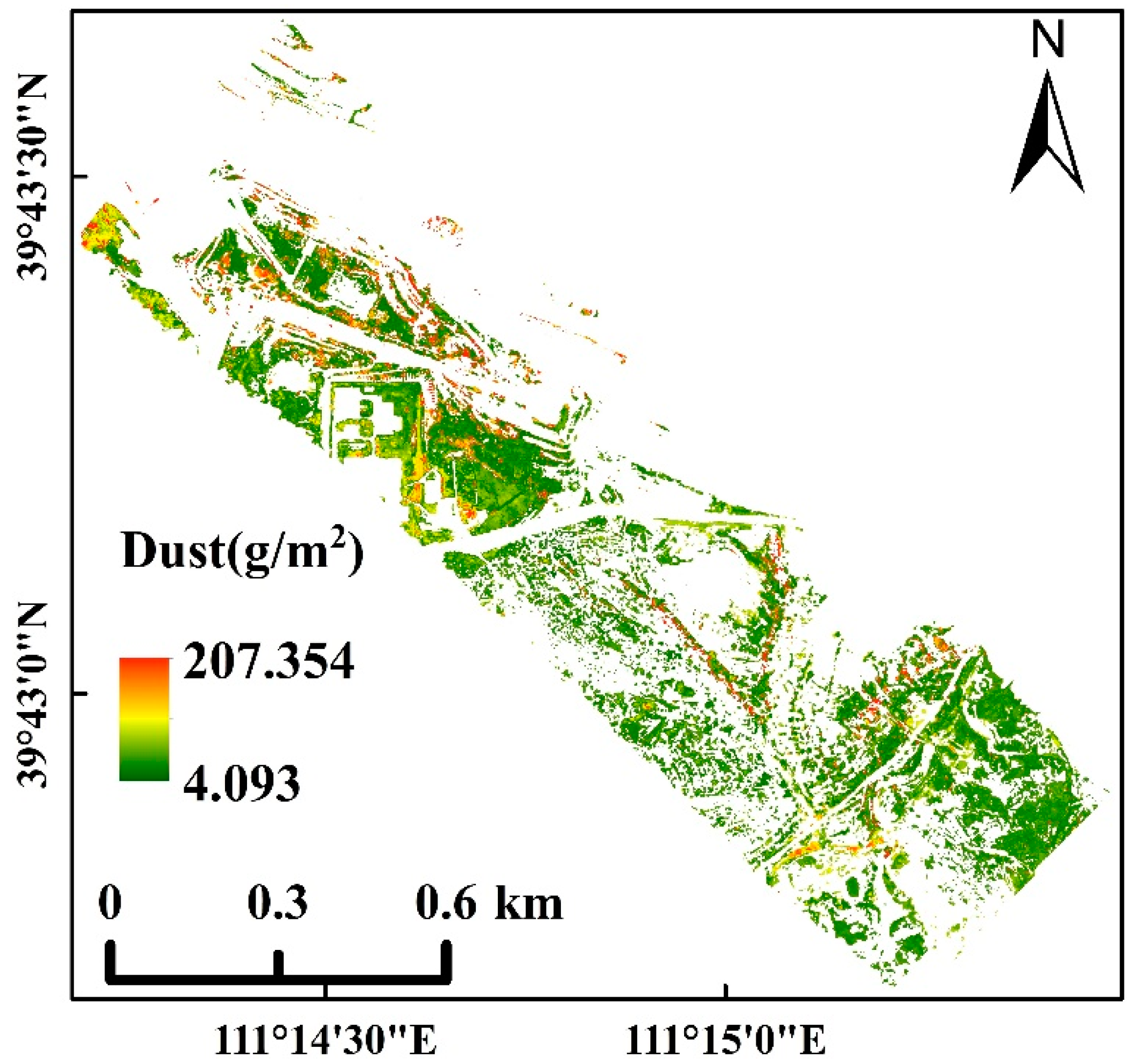
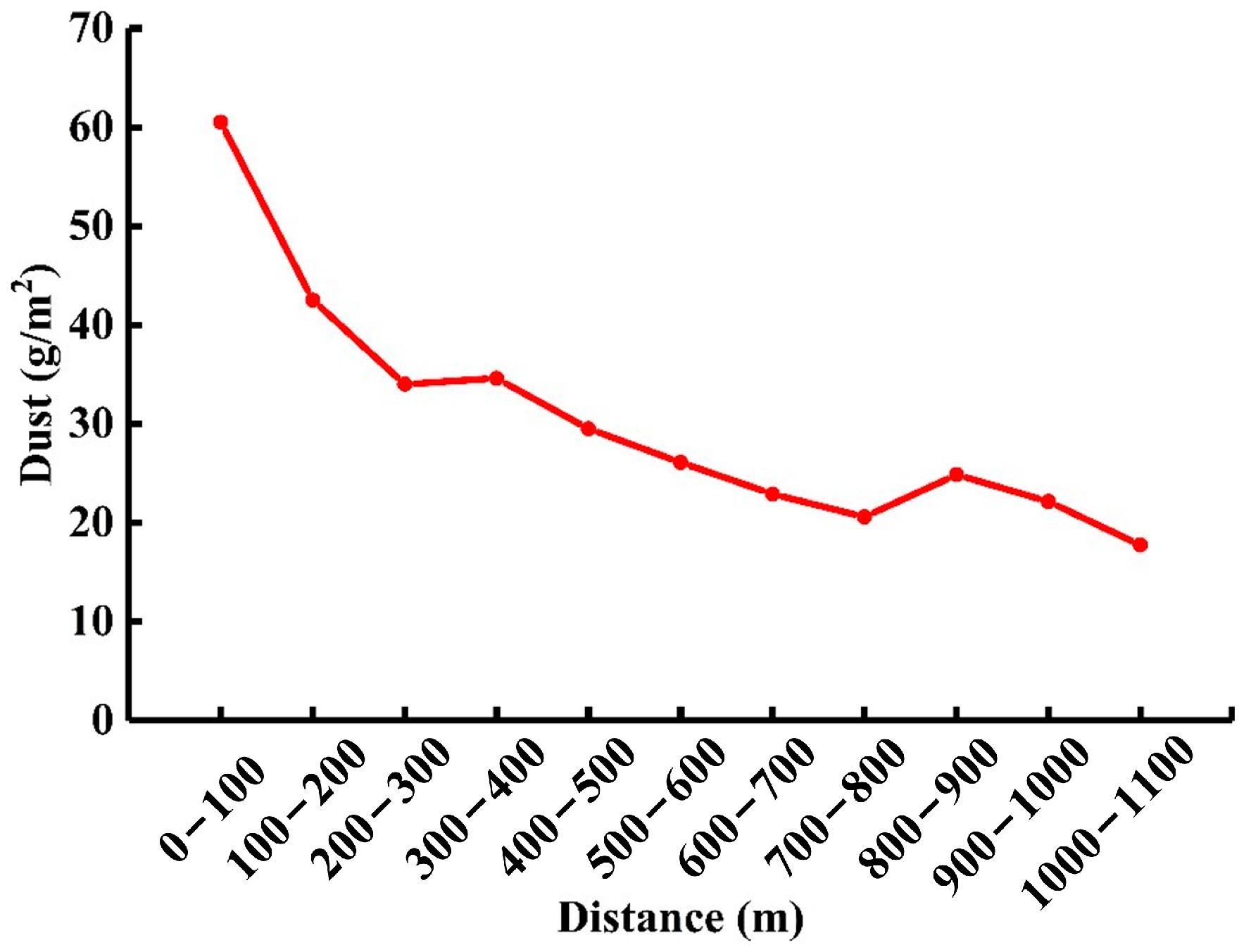
4.2. Spatial Distribution Characteristics of Canopy Dust Content
4.3. Limitation and Future Work
5. Conclusions
- (1)
- The geometric correction of the UAV-borne VNIR hyperspectral images accurately restored the true spatial information, revealing more distinct texture features. The absolute differences between the image coordinates of the GCPs and their measured coordinates are less than 0.270 m, with an RMSE of 0.246 m for all GCPs, demonstrating high positional accuracy.
- (2)
- Following radiometric correction, the UAV-borne VNIR hyperspectral image effectively mitigates the effects of sensor, atmospheric, and illumination–observation angle distortions. This correction restores the true reflectance information, enhances the overall brightness of the image, and improves consistency between adjacent strips.
- (3)
- Spectral transformation effectively enhances canopy dust feature information. The characteristic bands extracts by the CARS algorithm account for 20 to 30% of the total bands and are evenly distributed across the full spectral range, significantly reducing the computational complexity of the inversion model.
- (4)
- The accuracy of canopy dust content inversion is influenced by both feature extraction methods and modeling approaches. The optimal inversion model is obtained by combining LT-CARS and RF. This model exhibits strong predictive capability and can accurately invert canopy dust content. Canopy dust content decreases as the distance from the dust source increases.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Edenhofer, O. King Coal and the queen of subsidies. Science 2015, 349, 1286–1287. [Google Scholar]
- Li, Q. Progress of ecological restoration and comprehensive remediation technology in large-scale coal-fired power base in the eastern grassland area of China. J. China Coal Soc. 2019, 44, 3625–3635. [Google Scholar]
- Zhu, J.; Liang, C.; Zhu, G.; Wang, C.; Xu, H.; Wang, L. Preparation and long-term filtration performance of PLA-based nanofibrous membrane filters for ultra low-resistance respir-atory protection. J. China Coal Soc. 2024, 49, 1952–1963. [Google Scholar]
- Lu, J.; Lei, S. Research Overview of Effect of Dust on Environment and Its Diffusion Laws in Open-Pit Coal Mine. Saf. Coal Mines 2017, 48, 231–234. [Google Scholar]
- Ahrens, M.J.; Morrisey, D.J. Biological effects of unburnt coal in the marine environment. In Oceanography and Marine Biology; CRC Press: Boca Raton, FL, USA, 2005; pp. 79–132. [Google Scholar]
- Fan, Q.; Li, S.; Guan, T.; Wu, X.; Wang, R.; Ren, L. The ecological effect on plant and soil around opencast coal mine from the mineral dust. Environ. Dev. 2013, 25, 104–108. [Google Scholar]
- Li, Y.; Zhao, N.; Cao, Y.; Yang, J. Effects of coal dust deposition on the physiological properties of plants in an open-pit coal mine. Acta Ecol. Sin. 2018, 38, 8129–8138. [Google Scholar]
- Tezara, W.; Habash, D.; Paul, M.J.; Lawlor, D.W. Effects of water stress on the biochemistry and physiology of photosynthesis in sunflower. Photosynth. Res. 1995, 205, 625–628. [Google Scholar]
- Yang, H.; Wei, L.; Ye, X.; Liu, G.; Yang, X.; Huang, Z. Effects of coal dust deposition on seedling growth of Hedysarum laeve Maxim., a dominant plant species on Ordos Plateau. Acta Ecol. Sin. 2016, 36, 2858–2865. [Google Scholar]
- Li, D.; Zhao, Z.; Guo, S.; Zheng, L.; Zhang, X.; Sui, J. “13th Five-Year Plan” coal mine dust occupational hazard prevention and control technology and development direction. Min. Saf. Environ. Prot. 2022, 49, 51–58. [Google Scholar]
- Guo, H.; Cheng, Y.; Ren, T.; Wang, L.; Yuan, L.; Jiang, H.; Liu, H. Pulverization characteristics of coal from a strong outburst-prone coal seam and their impact on gas desorption and diffusion properties. J. Nat. Gas Sci. Eng. 2016, 33, 867–878. [Google Scholar]
- Yun, A.; Jinqing, Z.; Haijuan, Z.; Ruizhen, D. Research progress on the influencing factors and response mechanisms of plant adsorption of atmospheric particulate matter. Yingyong Shengtai Xuebao 2024, 35, 2013. [Google Scholar]
- Xiao, H.; Chen, X.; Ling, Q.; Zhou, Z. Analysis of dust detention capability of landscape plants and the hyperspectral remote sensing quantitative models construction of foliagedust detention. Resour. Environ. Yangtze Basin 2015, 24, 229–236. [Google Scholar]
- Brackx, M.; Van Wittenberghe, S.; Verhelst, J.; Scheunders, P.; Samson, R. Hyperspectral leaf reflectance of Carpinus betulus L. saplings for urban air quality estimation. Environ. Pollut. 2017, 220, 159–167. [Google Scholar]
- Yu, X.; Lin, W.; Wang, D.; Li, Y.; Sun, Y. Identification and characteristic analysis of urban vegetation spectra under different dust deposition. Environ. Sci. Pollut. Res. 2023, 30, 21299–21312. [Google Scholar] [CrossRef] [PubMed]
- Luo, N.; Zhao, W.; Yan, X. Impact of Dust-Fall on Spectral Features of Plant Leaves. Spectrosc. Spectr. Anal. 2013, 33, 2715–2720. [Google Scholar]
- Peng, J.; Xiang, H.Y.; Wang, J.Q.; Wen-Jun, J.I.; Zuo, T.G. Quantitative model of foliar dustfall content using hyperspectral remote sensing. J. Infrared Millim. Waves. 2013, 32, 313. [Google Scholar]
- Kayet, N.; Pathak, K.; Singh, C.P.; Chaturvedi, R.K.; Brahmandam, A.S.; Mandal, C. Assessment and estimation of coal dust impact on vegetation using VIs difference model and PRISMA hyperspectral data in mining sites. J. Environ. Manag. 2024, 367, 121935. [Google Scholar]
- Kayet, N.; Pathak, K.; Chakrabarty, A.; Kumar, S.; Chowdary, V.M.; Singh, C.P.; Sahoo, S.; Basumatary, S. Assessment of foliar dust using Hyperion and Landsat satellite imagery for mine environmental monitoring in an open cast iron ore mining areas. J. Clean. Prod. 2019, 218, 993–1006. [Google Scholar]
- Saaroni, H.; Chudnovsky, A.; Ben-Dor, E. Reflectance spectroscopy is an effective tool for monitoring soot pollution in an urban suburb. Sci. Total Environ. 2010, 408, 1102–1110. [Google Scholar] [CrossRef]
- Zhu, J.; Yu, Q.; Liu, X.; Yu, Y.; Yao, J.; Su, K.; Niu, T.; Zhu, H.; Zhu, Q. Effect of Leaf Dust Retention on Spectral Characteristics of Euonymus japonicus and Its Dust Retention Prediction. Spectrosc. Spectr. Anal. 2020, 40, 517–522. [Google Scholar]
- Su, K.; Yu, Q.; Hu, Y.; Liu, Z.; Wang, P.; Zhang, Q.; Zhu, J.; Niu, T.; Pei, Y.; Yue, D. Inversion Research on Dust Distribution of Urban Forests in Beijing in Winter Based on Spectral Characteristics. Spectrosc. Spectr. Anal. 2020, 40, 1696–1702. [Google Scholar]
- Jing, W.; Zhou, X.; Zhang, C.; Wang, C.; Jiang, H. Machine learning for estimating leaf dust retention based on hyperspectral measurements. J. Sens. 2018, 2018, 6026259. [Google Scholar] [CrossRef]
- Yan, X.; Shi, W.; Zhao, W.; Luo, N. Mapping dustfall distribution in urban areas using remote sensing and ground spectral data. Ence Total Environ. 2015, 506, 604–612. [Google Scholar]
- Wang, H.; Fang, N.; Yan, X.; Chen, F.; Xiong, Q.; Zhao, W. Retrieving Dustfall Distribution in Beijing City Based on Ground Spectral Data and Remote Sensing. Spectrosc. Spectr. Anal. 2016, 36, 2911–2918. [Google Scholar]
- Wang, G.; Yu, Q.; Yang, D.; Niu, T.; Long, Q. Retrieval of Dust Retention Distribution in Beijing Urban Green Space Based on Spectral Characteristics. Spectrosc. Spectr. Anal. 2022, 42, 2572–2578. [Google Scholar]
- Peng, J.; Wang, J.; Xiang, H.; Niu, J.; Chi, C.; Liu, W. Effect of Foliar Dustfall Content (FDC) on High Spectral Characteristics of Pear Leaves and Remote Sensing Quantitative Inversion of FDC. Spectrosc. Spectr. Anal. 2015, 35, 1365–1369. [Google Scholar]
- Zhu, J.; He, W.; Wang, H.; Yao, J.; Qin, G.; Xu, C.; Huang, T. The Response of Spectral Characteristics and Leaf Functional Traits of Euonymus Japonicus to Leaf Dustfall. Spectrosc. Spectr. Anal. 2020, 40, 1620–1625. [Google Scholar]
- Li, X.; Lei, S.; Liu, Y.; Chen, H.; Zhao, Y.; Gong, C.; Bian, Z.; Lu, X. Evaluation of ecological stability in semi-arid open-pit coal mining area based on structure and function coupling during 2002–2017. Remote Sens. 2021, 13, 5040. [Google Scholar] [CrossRef]
- Ma, W.; Ding, J.; Tan, K. Geometric correction of airborne HySpex hyperspectral image based on POS data. Sci. Surv. Mapp. 2017, 42, 130–136. [Google Scholar]
- Liu, J.; Zhang, Y.; Wang, D.; Xu, W. Geometric Rectification of Airborne Linear Array Pushbroom Imagery Supported by INS/DGPS System. Natl. Remote Sens. Bull. 2006, 10, 21–26. [Google Scholar]
- Jia, W.; Pang, Y.; Yue, C.; Li, Z.; Che, T.; Ma, M. The Processing of Airborne AISA Eagle II Data in Ejina Banner Study Area. Remote Sens. Technol. Appl. 2016, 31, 504–510. [Google Scholar]
- Zhou, Q.; Wang, S.; Liu, N.; Townsend, P.A.; Jiang, C.; Peng, B.; Verhoef, W.; Guan, K. Towards operational atmospheric correction of airborne hyperspectral imaging spectroscopy: Algorithm evaluation, key parameter analysis, and machine learning emulators. Isprs-J. Photogramm. Remote Sens. 2023, 196, 386–401. [Google Scholar]
- Acito, N.; Diani, M. Unsupervised atmospheric compensation of airborne hyperspectral images in the VNIR spectral range. Ieee Trans. Geosci. Remote Sens. 2017, 56, 2083–2106. [Google Scholar]
- Verhoef, W. Earth observation modeling based on layer scattering matrices. Remote Sens. Environ. 1985, 17, 165–178. [Google Scholar]
- Verhoef, W.; Van Der Tol, C.; Middleton, E.M. Hyperspectral radiative transfer modeling to explore the combined retrieval of biophysical parameters and canopy fluorescence from FLEX–Sentinel-3 tandem mission multi-sensor data. Remote Sens. Environ. 2018, 204, 942–963. [Google Scholar]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; Van Den Bosch, J. MODTRAN® 6: A major upgrade of the MODTRAN® radiative transfer code. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–4. [Google Scholar]
- Jia, W.; Pang, Y.; Tortini, R.; Schläpfer, D.; Li, Z.; Roujean, J. A kernel-driven BRDF approach to correct airborne hyperspectral imagery over forested areas with rugged topography. Remote Sens. 2020, 12, 432. [Google Scholar] [CrossRef]
- Schläpfer, D.; Richter, R.; Feingersh, T. Operational BRDF effects correction for wide-field-of-view optical scanners (BREFCOR). IEEE Trans. Geosci. Remote Sens. 2014, 53, 1855–1864. [Google Scholar]
- Li, X.; Gao, F.; Chen, L.; Strahler, A.H. Derivation and validation of a new kernel for kernel-driven BRDF models. In Remote Sensing for Earth Science, Ocean, and Sea Ice Applications; SPIE: Bellingham, WA, USA, 1999; Volume 3868, pp. 368–379. [Google Scholar]
- Zhang, X.; Jiao, Z.; Dong, Y.; Zhang, H.; Li, Y.; He, D.; Ding, A.; Yin, S.; Cui, L.; Chang, Y. Potential Investigation of Linking PROSAIL with the Ross-Li BRDF Model for Vegetation Characterization. Remote Sens. 2018, 10, 437. [Google Scholar] [CrossRef]
- Maignan, F.; Bréon, F.; Lacaze, R. Bidirectional reflectance of Earth targets: Evaluation of analytical models using a large set of spaceborne measurements with emphasis on the Hot Spot. Remote Sens. Environ. 2004, 90, 210–220. [Google Scholar]
- Duan, H.W.; Zhu, R.G.; Xu, W.D.; Qiu, Y.Y.; Yao, X.D.; Xu, C.J. Hyperspectral Imaging Detection of Total Viable Count from Vacuum Packing Cooling Mutton Based on GA and CARS Algorithms. Guang Pu Xue Yu Guang Pu Fen XI = Guang Pu 2017, 37, 847–852. [Google Scholar]
- Shi, X.; Song, J.; Wang, H.; Lv, X.; Zhu, Y.; Zhang, W.; Bu, W.; Zeng, L. Improving soil organic matter estimation accuracy by combining optimal spectral preprocessing and feature selection methods based on pXRF and vis-NIR data fusion. Geoderma 2023, 430, 116301. [Google Scholar]
- Hong, Y.; Chen, Y.; Yu, L.; Liu, Y.; Liu, Y.; Zhang, Y.; Liu, Y.; Cheng, H. Combining fractional order derivative and spectral variable selection for organic matter estimation of homogeneous soil samples by VIS–NIR spectroscopy. Remote Sens. 2018, 10, 479. [Google Scholar] [CrossRef]
- Zhou, W.; Xiao, J.; Li, H.; Chen, Q.; Wang, T.; Wang, Q.; Yue, T. Soil organic matter content prediction using Vis-NIRS based on different wavelength optimization algorithms and inversion models. J. Soils Sediments 2023, 23, 2506–2517. [Google Scholar]
- Hou, L.; Li, X.; Li, F. Hyperspectral-based Inversion of Heavy Metal Content in the Soil of Coal Mining Areas. J. Environ. Qual. 2019, 48, 57–63. [Google Scholar]
- Guan, T.; Lin, Z.; Groves, K.; Cao, J. Sparse functional partial least squares regression with a locally sparse slope function. Stat. Comput. 2022, 32, 30. [Google Scholar]
- Tang, S.; Du, C.; Nie, T. Inversion estimation of soil organic matter in Songnen plain based on multispectral analysis. Land 2022, 11, 608. [Google Scholar] [CrossRef]
- Lin, L.; Liu, X. Water-based measured-value fuzzification improves the estimation accuracy of soil organic matter by visible and near-infrared spectroscopy. Sci. Total Environ. 2020, 749, 141282. [Google Scholar]
- Petković, D.; Danesh, A.S.; Dadkhah, M.; Misaghian, N.; Shamshirband, S.; Zalnezhad, E.; Pavlović, N.D. Adaptive control algorithm of flexible robotic gripper by extreme learning machine. Robot. Comput.-Integr. Manuf. 2016, 37, 170–178. [Google Scholar]
- Wu, S.; Wang, Y.; Cheng, S. Extreme learning machine based wind speed estimation and sensorless control for wind turbine power generation system. Neurocomputing 2013, 102, 163–175. [Google Scholar]
- Cao, J.; Hao, J.; Lai, X.; Vong, C.; Luo, M. Ensemble extreme learning machine and sparse representation classification. J. Frankl. Inst. 2016, 353, 4526–4541. [Google Scholar]
- Hong, Y.; Chen, S.; Zhang, Y.; Chen, Y.; Yu, L.; Liu, Y.; Liu, Y.; Cheng, H.; Liu, Y. Rapid identification of soil organic matter level via visible and near-infrared spectroscopy: Effects of two-dimensional correlation coefficient and extreme learning machine. Sci. Total Environ. 2018, 644, 1232–1243. [Google Scholar]
- Liu, S.; Feng, L.; Xiao, Y.; Wang, H. Robust activation function and its application: Semi-supervised kernel extreme learning method. Neurocomputing 2014, 144, 318–328. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, M.; Yang, K.; Zhao, H. Inversion monitoring of heavy metal pollution in corn crops based on ZY-1 02D hyperspectral imaging. Microchem. J. 2024, 208, 112305. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Ma, R.; Zhou, W. Soil Nutrients Inversion in Open-Pit Coal Mine Reclamation Area of Loess Plateau, China: A Study Based on ZhuHai-1 Hyperspectral Remote Sensing. Land Degrad. Dev. 2024, 35, 5210–5223. [Google Scholar]
- Li, J.; Sheng, H.; Xu, M.; Liu, S.; Zeng, Z. BAMS-FE: Band-by-band adaptive multiscale superpixel feature extraction for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–15. [Google Scholar]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar]
- Ke, B.; Nguyen, H.; Bui, X.; Bui, H.; Choi, Y.; Zhou, J.; Moayedi, H.; Costache, R.; Nguyen-Trang, T. Predicting the sorption efficiency of heavy metal based on the biochar characteristics, metal sources, and environmental conditions using various novel hybrid machine learning models. Chemosphere 2021, 276, 130204. [Google Scholar]
- Lu, H.; Li, H.; Liu, T.; Fan, Y.; Yuan, Y.; Xie, M.; Qian, X. Simulating heavy metal concentrations in an aquatic environment using artificial intelligence models and physicochemical indexes. Sci. Total Environ. 2019, 694, 133591. [Google Scholar] [CrossRef] [PubMed]
- Liang, L.; Di, L.; Zhang, L.; Deng, M.; Qin, Z.; Zhao, S.; Lin, H. Estimation of crop LAI using hyperspectral vegetation indices and a hybrid inversion method. Remote Sens. Environ. 2015, 165, 123–134. [Google Scholar]
- Dai, L.; Ge, J.; Wang, L.; Zhang, Q.; Liang, T.; Bolan, N.; Lischeid, G.; Rinklebe, J. Influence of soil properties, topography, and land cover on soil organic carbon and total nitrogen concentration: A case study in Qinghai-Tibet plateau based on random forest regression and structural equation modeling. Sci. Total Environ. 2022, 821, 153440. [Google Scholar]
- Millard, K.; Richardson, M. On the importance of training data sample selection in random forest image classification: A case study in peatland ecosystem mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef]
- Yan, Y.; Yang, J.; Li, B.; Qin, C.; Ji, W.; Xu, Y.; Huang, Y. High-resolution mapping of soil organic matter at the field scale using UAV hyperspectral images with a small calibration dataset. Remote Sens. 2023, 15, 1433. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, F.; Gong, Y.; Yang, X.; Zhang, Z. Multiple Environmental Variables as Covariates to Improve the Accuracy of Spatial Prediction Models for SOM on Karst Aera. Land Degrad. Dev. 2025, 36, 1656–1666. [Google Scholar] [CrossRef]
- Tan, K.; Wang, H.; Zhang, Q.; Jia, X. An improved estimation model for soil heavy metal (loid) concentration retrieval in mining areas using reflectance spectroscopy. J. Soils Sediments 2018, 18, 2008–2022. [Google Scholar]
- Guo, Y.; Wang, X.; Zhao, F.; Li, P. Hyperspectral inversion of the RF model for soil salinity in oasis tillage layer based on optimal mathematics and wavelet transform. Trans. Chin. Soc. Agric. Eng. 2025, 41, 83–93. [Google Scholar]
- Tan, K.; Ma, W.; Chen, L.; Wang, H.; Du, Q.; Du, P.; Yan, B.; Liu, R.; Li, H. Estimating the distribution trend of soil heavy metals in mining area from HyMap airborne hyperspectral imagery based on ensemble learning. J. Hazard. Mater. 2021, 401, 123288. [Google Scholar] [CrossRef] [PubMed]
- Ding, J.; Wu, M.; Liu, H.; Li, Z. Study on the Soil Salinization Monitoring Based on Synthetical Hyperspectral Index. Spectrosc. Spectr. Anal. 2012, 32, 1918–1922. [Google Scholar]
- Li, Z.; Deng, F.; He, J.; Wei, W. Hyperspectral Estimation Model of Heavy Metal Arsenic in Soil. Spectrosc. Spectr. Anal. 2021, 41, 2872–2878. [Google Scholar]
- Liang, Z.; Qian, J.; Chu, X.; Qian, Z.; Wang, M.; Li, J. Monitoring heavy metal contamination of wheat soil using hyperspectral remote sensing technology. Trans. Chin. Soc. Agric. Eng. 2023, 39, 265–270. [Google Scholar]
- Wang, Y.; Li, X.; Li, L.; Li, N.; Jiang, Q.; Gu, X.; Yang, X.; Lin, J. Quantitative Inversion of Chlorophyll Content in Stem and Branch of Pitaya Based on Discrete Wavelet Differential Transform Algorithm. Spectrosc. Spectr. Anal. 2023, 43, 549–556. [Google Scholar]
- Ji, X.; Zhang, M.; Wang, B.; Huang, L. Soft Sensor of Lysien Fermentation Biological Parameters Based on Relevance Vector Machine. J. Huaqiao Univ. (Nat. Sci.) 2013, 34, 22–25. [Google Scholar]
- Chen, H.; Wang, J.; Tao, H.; Li, Z.; Wang, Y. Parameter-free nonlinear partial least squares regression model for image classification. J. Electron. Imaging 2023, 32, 63024. [Google Scholar]
- Chen, H.; Sun, Y.; Gao, J.; Hu, Y.; Yin, B. Solving partial least squares regression via manifold optimization approaches. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 588–600. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Technical Details | Data |
|---|---|
| Spectral range (nm) | 400–1000 |
| Bands | 112 |
| Spectral sampling (nm) | 3.4 |
| Spatial sampling | 512 |
| Spatial resolution (m) | 0.3 |
| Size (GB) | 14.2 |
| Class Names | Value | Class Names | Value | Class Names | Value |
|---|---|---|---|---|---|
| Building | 99.28 | Gravel | 78.13 | Elm | 91.67 |
| Pavement | 83.72 | Apple tree | 75.00 | Feather grass | 100.00 |
| Artemisia | 80.72 | Apricot tree | 86.67 | False indigo | 83.33 |
| Elymus grass | 93.94 | Bare soil | 97.44 | AA | 87.71 |
| Willow | 75.00 | Peach tree | 80.00 | OA | 91.26 |
| Mine | 90.70 | Poplar | 100.00 | Kappa | 0.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Lei, S.; Han, X.; Xu, Y.; Li, J.; Duan, Y.; Sun, S. Research on the Inversion Method of Dust Content on Mining Area Plant Canopies Based on UAV-Borne VNIR Hyperspectral Data. Drones 2025, 9, 256. https://doi.org/10.3390/drones9040256
Zhao Y, Lei S, Han X, Xu Y, Li J, Duan Y, Sun S. Research on the Inversion Method of Dust Content on Mining Area Plant Canopies Based on UAV-Borne VNIR Hyperspectral Data. Drones. 2025; 9(4):256. https://doi.org/10.3390/drones9040256
Chicago/Turabian StyleZhao, Yibo, Shaogang Lei, Xiaotong Han, Yufan Xu, Jianzhu Li, Yating Duan, and Shengya Sun. 2025. "Research on the Inversion Method of Dust Content on Mining Area Plant Canopies Based on UAV-Borne VNIR Hyperspectral Data" Drones 9, no. 4: 256. https://doi.org/10.3390/drones9040256
APA StyleZhao, Y., Lei, S., Han, X., Xu, Y., Li, J., Duan, Y., & Sun, S. (2025). Research on the Inversion Method of Dust Content on Mining Area Plant Canopies Based on UAV-Borne VNIR Hyperspectral Data. Drones, 9(4), 256. https://doi.org/10.3390/drones9040256