

Adaptive Observer-Based Neural Network Control for Multi-UAV Systems with Predefined-Time Stability

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1).
- A distributed adaptive velocity observer, integrated with the predefined-time control scheme, is proposed to generate an online estimation of the leader’s information based on uncertain multi-UAV systems. Consequently, the developed neural network-based predefined-time control strategy can fully guarantee asymptotic convergence to the desired geometric position pattern while also achieving complete attitude synchronization.
- (2).
- A sliding-mode variable within the predefined-time framework is introduced to design the neural network-based intelligent formation algorithm for multi-UAV systems with uncertain dynamics and external disturbances. This approach results in a predefined-time formation strategy with faster convergence speed, higher accuracy, and better robustness compared to most existing schemes proposed in Refs. [29,30].
- (3).
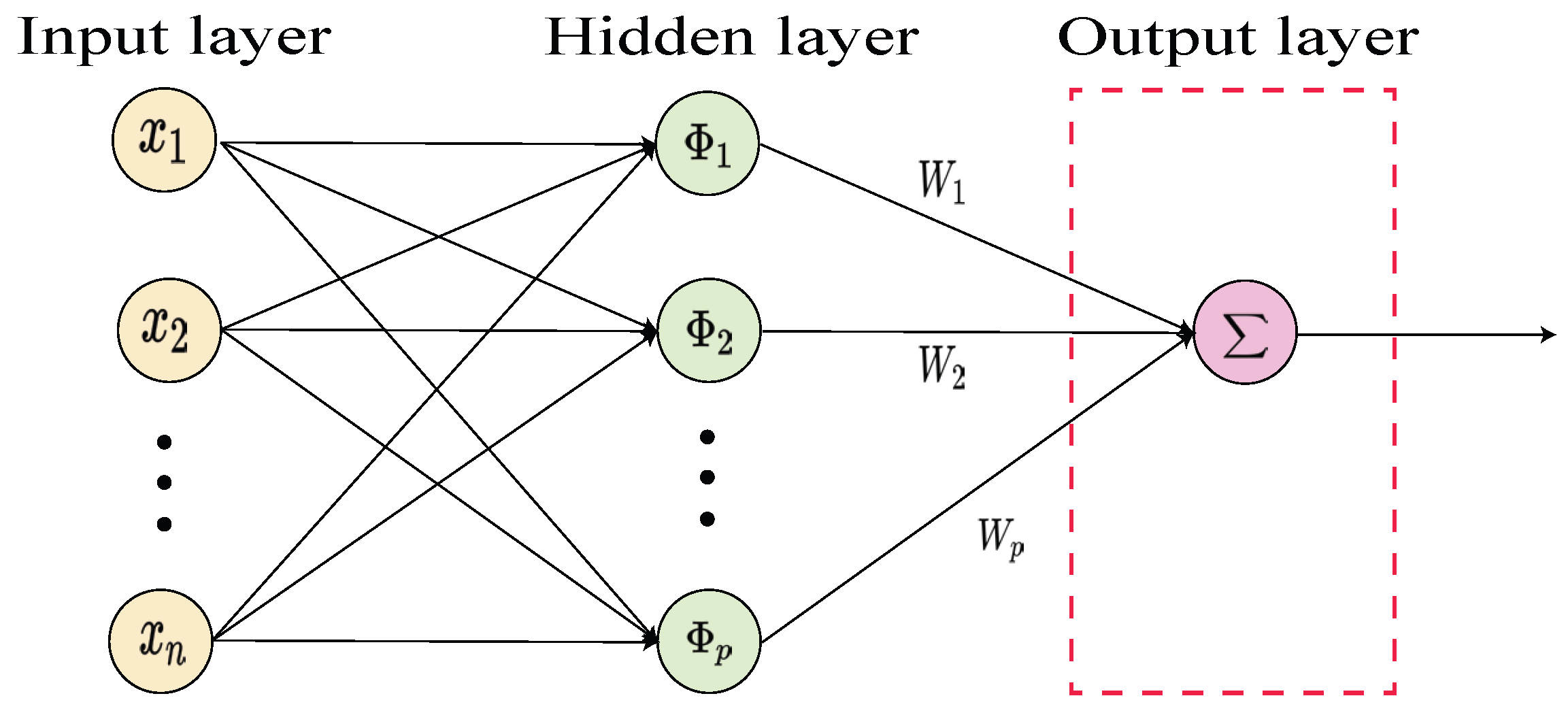
- An RBF neural network technique, with universal approximation and learning capabilities, is effectively applied to implement the predefined-time formation control scheme, which consists of a translational motion controller and a rotational motion controller. This approach can effectively handle uncertain system models and external disturbances, in contrast to most existing formation control schemes reported in recent works [31,32].
2. Preliminaries
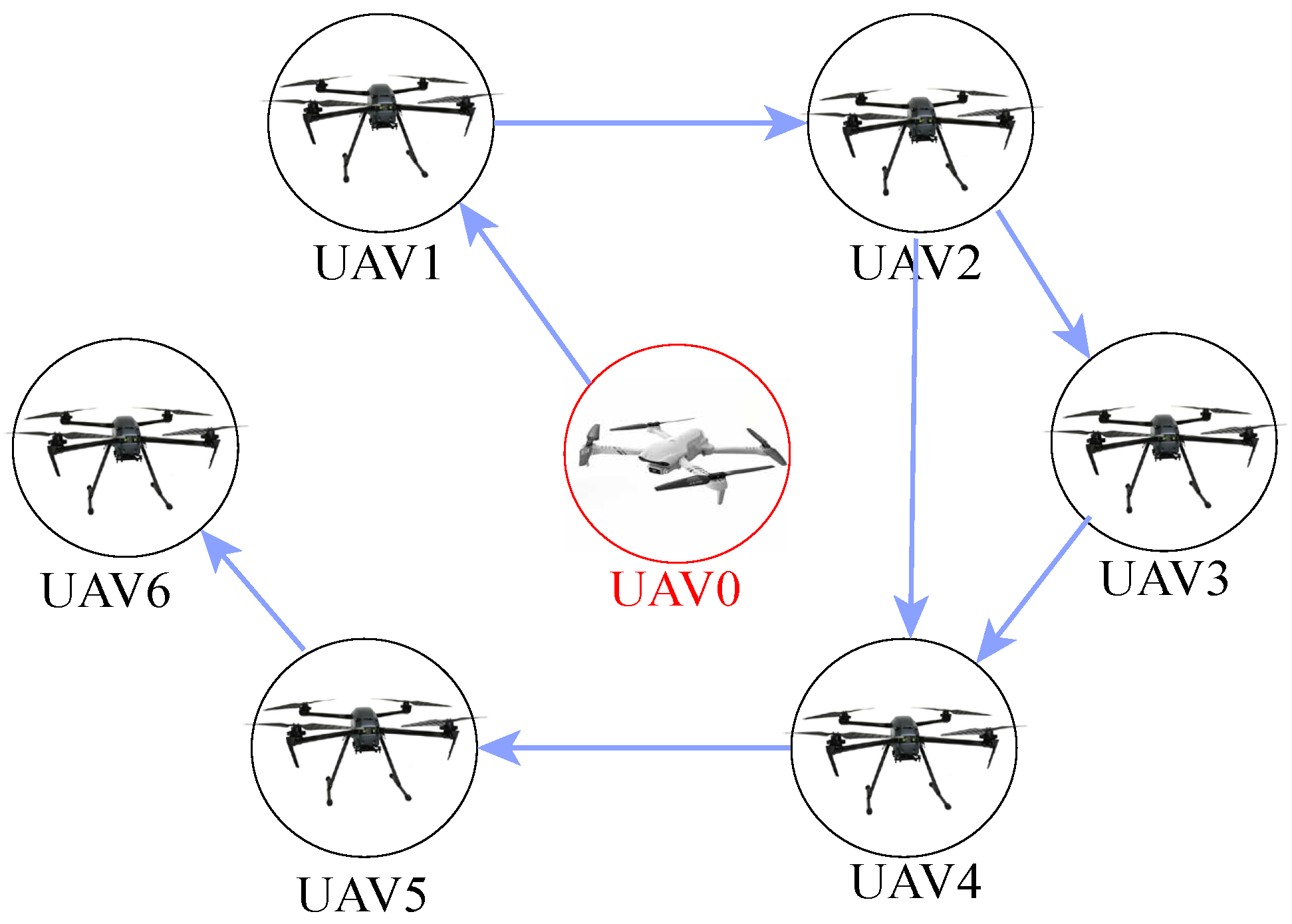
2.1. Communication Topology
2.2. Predefined-Time Stability
2.3. RBF Neural Network
3. Problem Formulation
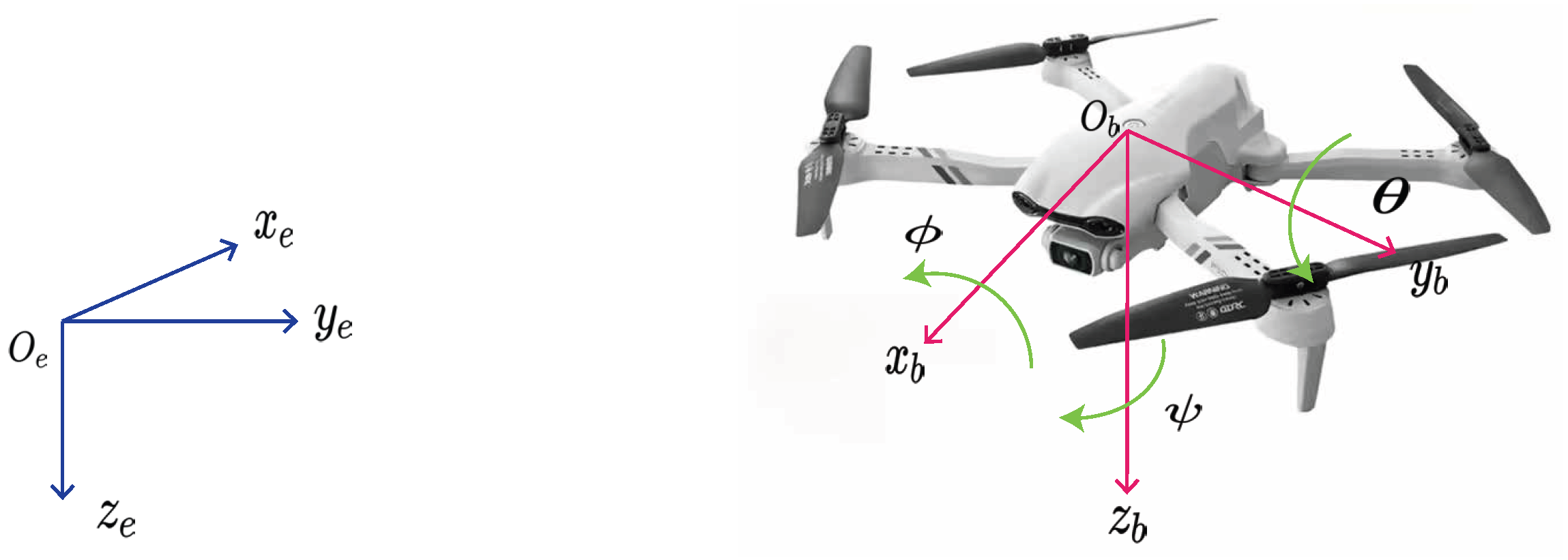
3.1. Quadrotor UAV Model
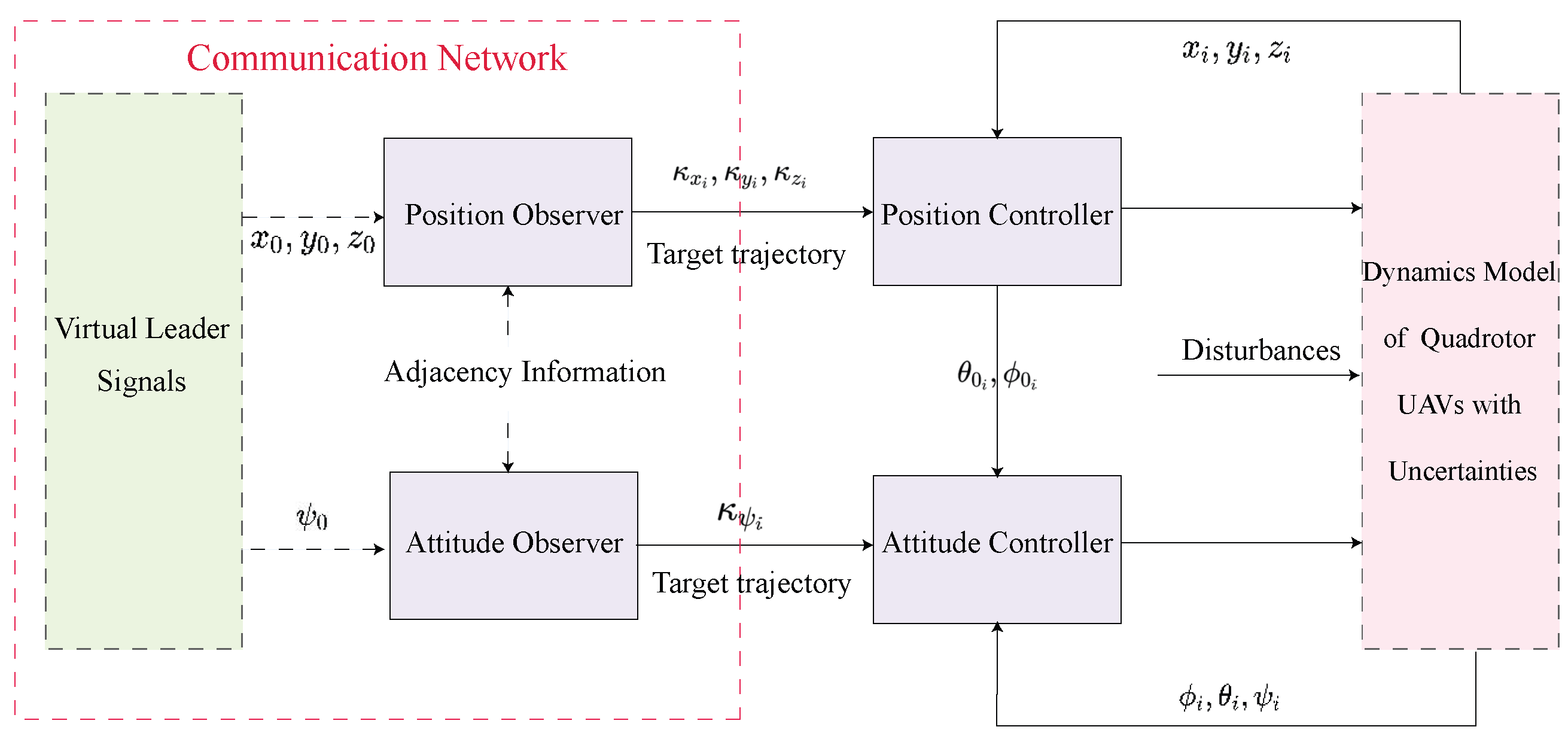
3.2. Control Objective
4. Predefined-Time Motion Control for Translational Systems
4.1. Translational Motion Controller
4.2. Translational Motion Stability Analysis
5. Predefined-Time Motion Control for Rotational Systems
5.1. Rotational Motion Controller
5.2. Rotational Motion Stability Analysis
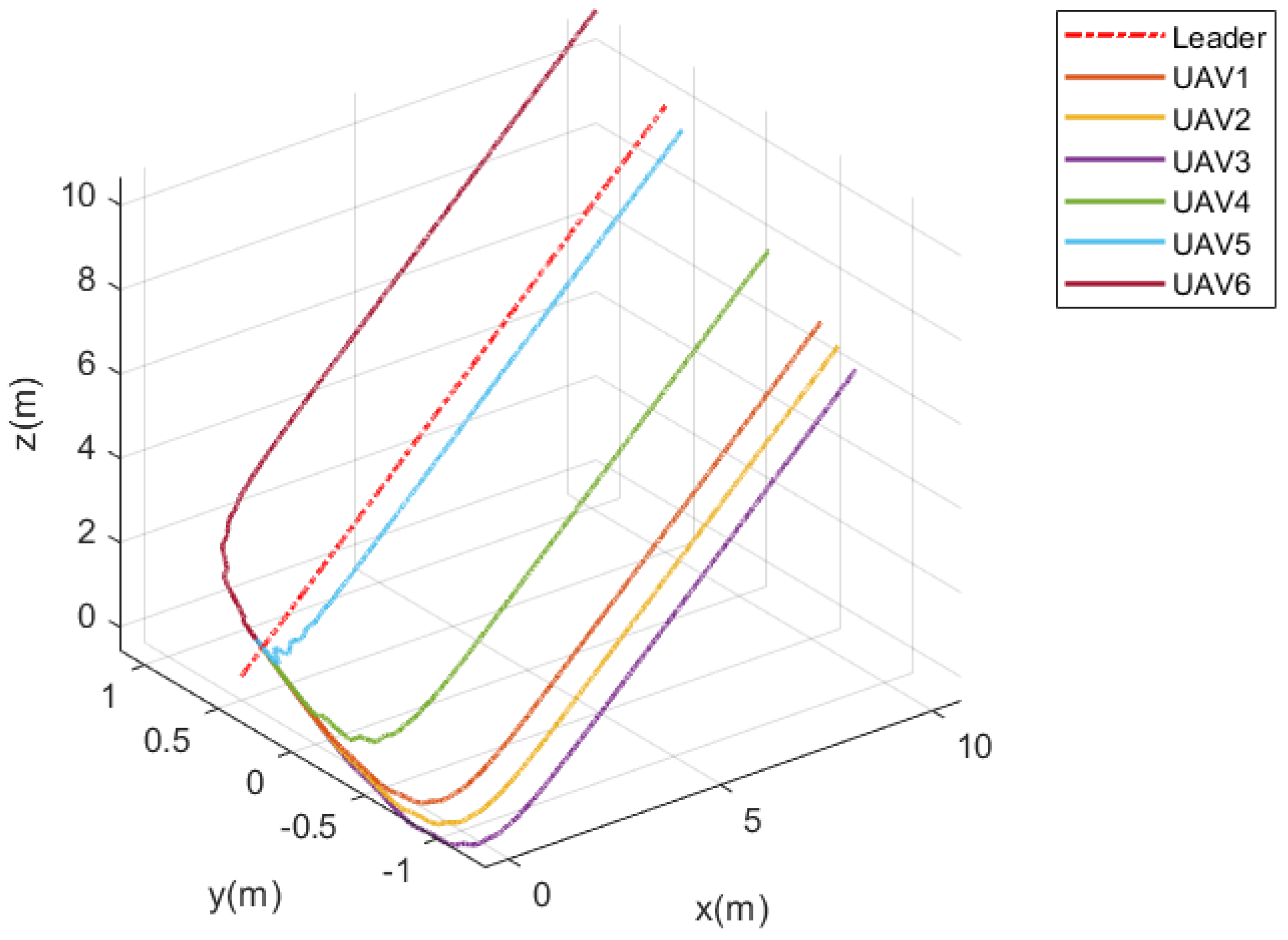
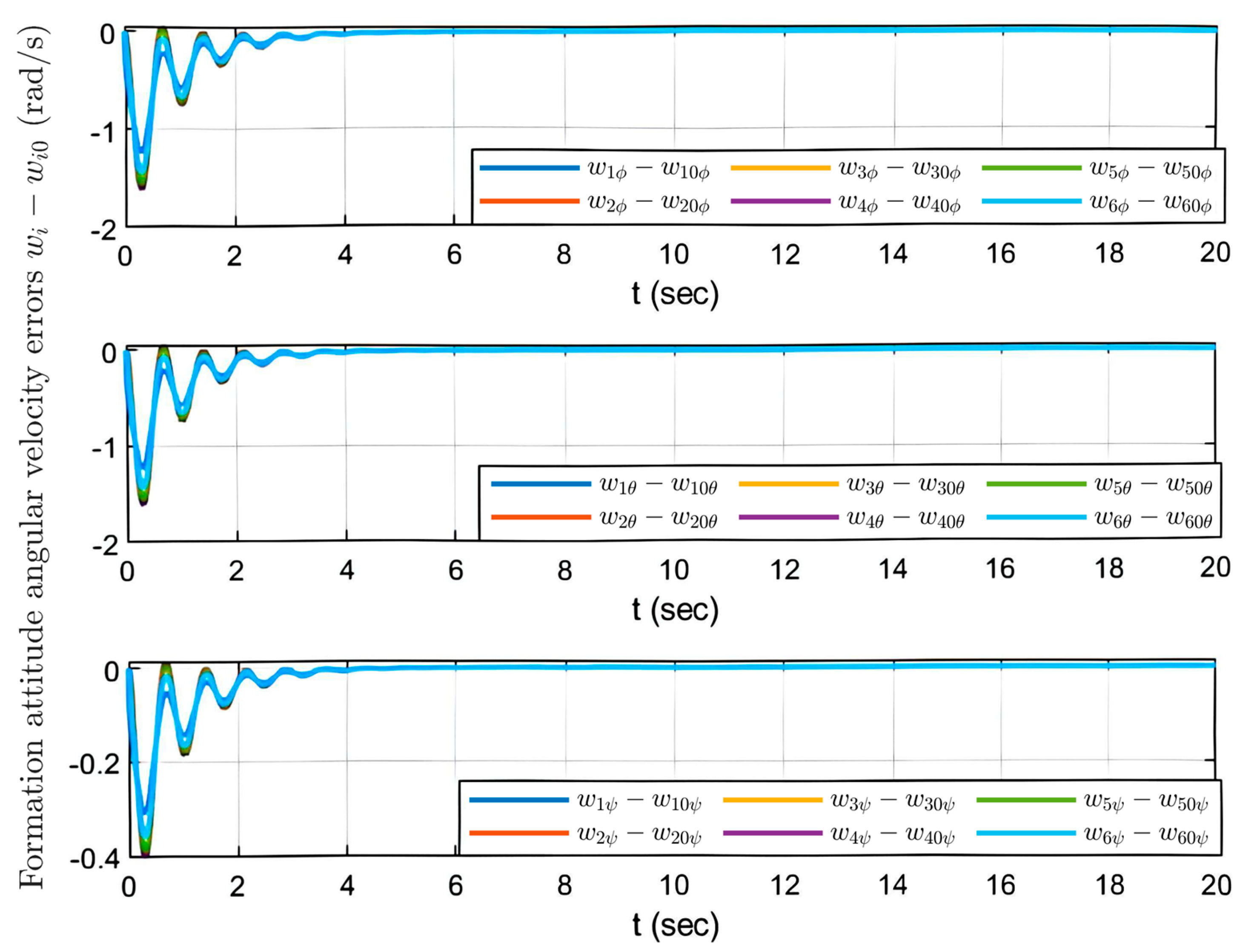
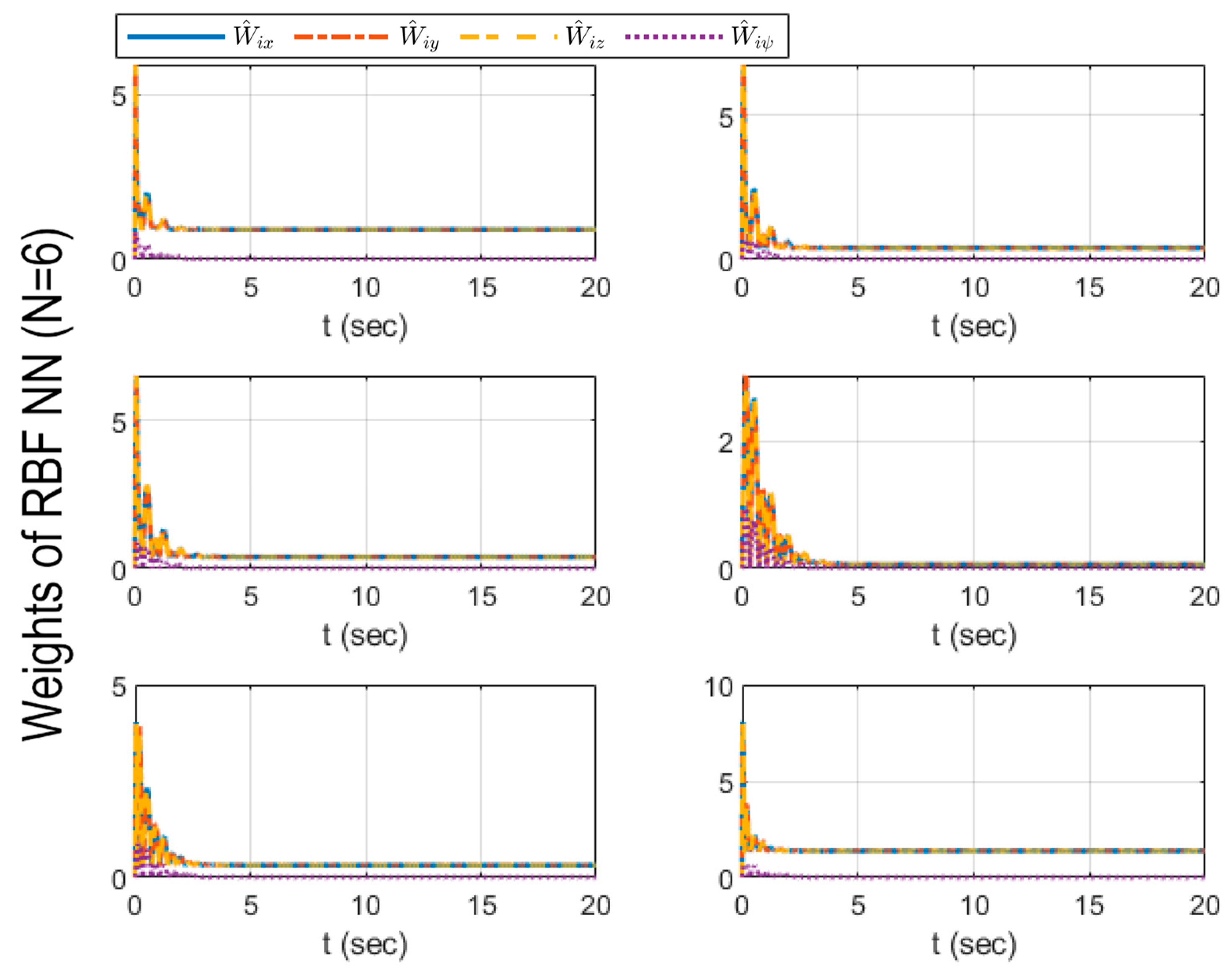
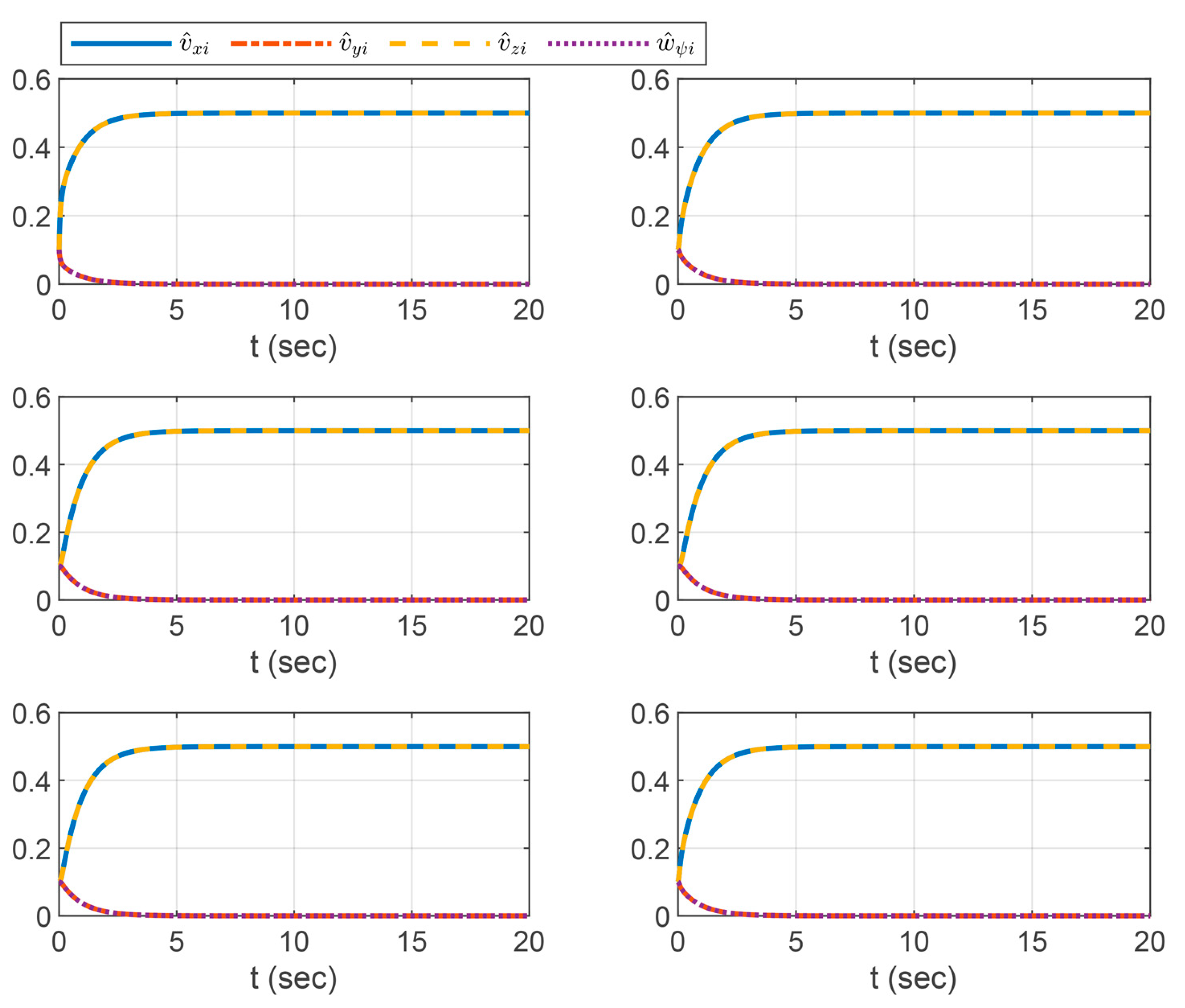
6. Numerical Simulations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, K.; Wang, R.J.; Wang, X.D.; Wang, X.X. Anti-Saturation Adaptive Finite-Time Neural Network-Based Fault-Tolerant Tracking Control for a Quadrotor UAV with External Disturbances. Aerosp. Sci. Technol. 2021, 115, 106790. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Ramirez-Rodriguez, H.; Parra-Vega, V.; Sanchez-Orta, A.; Garcia-Salazar, O. Robust Backstepping Control Based on Integral Sliding Modes for Tracking of Quadrotors. J. Intell. Robot. Syst. 2014, 73, 51–66. [Google Scholar] [CrossRef]
- Wang, B.; Li, Q.; Mao, Q.; Wang, J.; Chen, C.L.P.; Shangguan, A.; Zhang, H. A Survey on Vision-Based Anti Unmanned Aerial Vehicles Methods. Drones 2024, 8, 518. [Google Scholar] [CrossRef]
- Nettari, Y.; Labbadi, M.; Kurt, S. Adaptive Robust Finite-Time Tracking Control for Quadrotor Subject to Disturbances. Adv. Space Res. 2023, 71, 3803–3821. [Google Scholar] [CrossRef]
- Zhu, P.F.; Wen, L.Y.; Du, D.W.; Bian, X.; Fan, H.; Hu, Q.H.; Ling, H.B. Detection and Tracking Meet Drones Challenge. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 7380–7399. [Google Scholar] [CrossRef]
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Pan, J.S.; Lv, J.X.; Yan, L.J.; Weng, S.W.; Chu, S.C.; Xue, J.K. Golden Eagle Optimizer with Double Learning Strategies for 3D Path Planning of UAV in Power Inspection. Math. Comput. Simul. 2022, 193, 509–532. [Google Scholar] [CrossRef]
- Wei, L.; Chen, M. Distributed DETMs-Based Internal Collision Avoidance Control for UAV Formation with Lumped Disturbances. Appl. Math. Comput. 2022, 433, 127362. [Google Scholar] [CrossRef]
- Huang, F.J.; Wu, P.L.; Li, X.X. Distributed Flocking Control of Quad-rotor UAVs with Obstacle Avoidance Under the Parallel-triggered Scheme. Int. J. Control Autom. Syst. 2021, 19, 1375–1383. [Google Scholar] [CrossRef]
- Fu, X.; Peng, J. Iterative Learning Control for UAVs Formation Based on Point-to-Point Trajectory Update Tracking. Math. Comput. Simul. 2023, 209, 1–15. [Google Scholar] [CrossRef]
- Wang, H.P.; Song, S.Y.; Guo, Q.H.; Xu, D.; Zhang, X.Y.; Wang, P.Z. Cooperative Motion Planning for Persistent 3D Visual Coverage with Multiple Quadrotor UAVs. IEEE Trans. Autom. Sci. Eng. 2024, 21, 3374–3383. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired Tracking of Delayed Quadrotor UAV Under Model Uncertainty and Wind Disturbance Using Adaptive Super-Twisting Terminal Sliding Mode Control. ISA Trans. 2022, 123, 455–471. [Google Scholar] [CrossRef]
- Li, J.; Zhao, Z.; Qin, X. Adaptive Sliding Mode Control Using a Novel Fully Feedback Recurrent Neural Network for Quadrotor UAVs. Neurocomputing 2024, 610, 128592. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive Finite-Time Backstepping Global Sliding Mode Tracker of Quad-Rotor UAVs Under Model Uncertainty, Wind Perturbation, and Input Saturation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 140–151. [Google Scholar] [CrossRef]
- Aspragkathos, S.N.; Karras, G.C.; Kyriakopoulos, K.J. Event-Triggered Image Moments Predictive Control for Tracking Evolving Features Using UAVs. IEEE Robot. Autom. Lett. 2024, 9, 1019–1026. [Google Scholar] [CrossRef]
- Liu, K.; Yang, P.; Wang, R.J.; Jiao, L.; Li, T.; Zhang, J. Observer-Based Adaptive Fuzzy Finite-Time Attitude Control for Quadrotor UAVs. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8637–8654. [Google Scholar] [CrossRef]
- Liu, K.; Yang, P.; Jiao, L.; Wang, R.J.; Yuan, Z.P.; Dong, S.F. Antisaturation Fixed-Time Attitude Tracking Control Based on Low-Computation Learning for Uncertain Quadrotor UAVs with External Disturbances. Aerosp. Sci. Technol. 2023, 142, 108668. [Google Scholar] [CrossRef]
- Wen, S.Q.; Tong, S.C. Observer-Based Adaptive Neural Network Inverse Optimal Containment Control for Nonlinear Multiagent Systems with Input Quantization. Neurocomputing 2024, 592, 127796. [Google Scholar] [CrossRef]
- Gong, B.; Li, Y.; Zhang, L.; Ai, J. Adaptive Factor Fuzzy Controller for Keeping Multi-UAV Formation While Avoiding Dynamic Obstacles. Drones 2024, 8, 344. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, H.; Wang, Z.; Yan, H. Model Predictive Formation Tracking-Containment Control for Multi-UAVs with Obstacle Avoidance. IEEE Trans. Syst. Man-Cybern.-Syst. 2024, 54, 3404–3414. [Google Scholar] [CrossRef]
- Xia, K.; Li, X.; Li, K.; Zou, Y. Distributed Predefined-Time Control for Cooperative Tracking of Multiple Quadrotor UAVs. IEEE/CAA J. Autom. Sin. 2024, 11, 2179–2181. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.; Zhang, H.; Liu, S. Predefined-Time Composite Adaptive Fuzzy Nonsingular Attitude Control for Multi-UAVs. IEEE Trans. Fuzzy Syst. 2024. [Google Scholar] [CrossRef]
- Guo, K.; Li, X.; Xie, L. Ultra-Wideband and Odometry-Based Cooperative Relative Localization with Application to Multi-UAV Formation Control. IEEE Trans. Cybern. 2020, 50, 2590–2603. [Google Scholar] [CrossRef]
- Madhiarasan, M.; Louzazni, M. Analysis of Artificial Neural Network: Architecture, Types, and Forecasting Applications. J. Electr. Comput. Eng. 2022, 2022, 5416722. [Google Scholar] [CrossRef]
- Zhao, A.; Toudeshki, A.; Ehsani, R.; Sun, J.Q. Data-Driven Inverse Kinematics Approximation of a Delta Robot with Stepper Motors. Robotics 2023, 12, 135. [Google Scholar] [CrossRef]
- Guo, W.; Shi, L.; Sun, W.; Jahanshahi, H. Predefined-Time Average Consensus Control for Heterogeneous Nonlinear Multi-Agent Systems. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2989–2993. [Google Scholar] [CrossRef]
- Wang, J.; Fang, X.; Li, X. Predefined-Time Platoon Control of Unmanned Aerial Vehicle with Range-Limited Communication. Drones 2024, 8, 263. [Google Scholar] [CrossRef]
- Ding, J.; Jiang, X.; Zou, Y.; Tang, Z.; Zhen, Z. A Multivariable Adaptive Formation Control for Multiple UAVs with External Uncertain Disturbances. Aircr. Eng. Aerosp. Technol. 2025, 97, 170–178. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, C.; Wang, Y.; Zhang, T.; Gong, Y. A Fast Formation Obstacle Avoidance Algorithm for Clustered UAVs Based on Artificial Potential Field. Aerosp. Sci. Technol. 2024, 147, 108974. [Google Scholar] [CrossRef]
- Li, N.; Wang, H.; Luo, Q.; Zheng, W. Distributed Formation Control for Multiple Quadrotor UAVs Based on Distributed Estimator and Singular Perturbation System. Int. J. Control Autom. Syst. 2024, 22, 1349–1359. [Google Scholar] [CrossRef]
- Hartley, J.; Shum, H.P.; Ho, E.S.; Wang, H.; Ramamoorthy, S. Formation Control for UAVs Using a Flux-Guided Approach. Expert Syst. Appl. 2022, 205, 117665. [Google Scholar] [CrossRef]
- Li, Y.; Li, H.; Ding, X.; Zhao, G. Leader-Follower Consensus of Multiagent Systems with Time Delays Over Finite Fields. IEEE Trans. Cybern. 2019, 49, 3203–3208. [Google Scholar] [CrossRef] [PubMed]
- Aldana-López, R.; Gómez-Gutiérrez, D.; Jiménez-Rodríguez, E.; Sánchez-Torres, J.D.; Defoort, M. Enhancing the Settling Time Estimation of a Class of Fixed-Time Stable Systems. Int. J. Robust Nonlinear Control 2019, 29, 4135–4148. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, H.; Lin, C. Observer-Based Adaptive Neural Network Control for Nonlinear Systems in Nonstrict-Feedback Form. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 89–98. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zhang, G.B. Global Fast Dynamic Terminal Sliding Mode Control for a Quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef]
- Okasha, M.; Kralev, J.; Islam, M. Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for Parrot Mambo Mini-Drone. Aerospace 2022, 9, 298. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, J.; Ahn, C.K.; Xiang, Z. Neural Adaptive Distributed Formation Control of Nonlinear Multi-UAVs with Unmodeled Dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 9555–9561. [Google Scholar] [CrossRef]
- Gao, H.; Xia, Y.; Liu, K.; Zhang, J.; Cui, B. Resilient Neuroadaptive Distributed Fixed-Time Attitude Coordination Control for Multiple Spacecraft. IEEE Trans. Cybern. 2024, 54, 4973–4985. [Google Scholar] [CrossRef]
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-Varying Formation Tracking for Second-Order Multi-Agent Systems Subjected to Switching Topologies with Application to Quadrotor Formation Flying. IEEE Trans. Ind. Electron. 2017, 64, 5014–5024. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Sha, H.; Peng, R.; Li, N.; Miao, Z.; He, C.; Zhou, J. Adaptive Observer-Based Neural Network Control for Multi-UAV Systems with Predefined-Time Stability. Drones 2025, 9, 222. https://doi.org/10.3390/drones9030222
Zhang Y, Sha H, Peng R, Li N, Miao Z, He C, Zhou J. Adaptive Observer-Based Neural Network Control for Multi-UAV Systems with Predefined-Time Stability. Drones. 2025; 9(3):222. https://doi.org/10.3390/drones9030222
Chicago/Turabian StyleZhang, Yunli, Hongsheng Sha, Runlong Peng, Nan Li, Zhonghua Miao, Chuangxin He, and Jin Zhou. 2025. "Adaptive Observer-Based Neural Network Control for Multi-UAV Systems with Predefined-Time Stability" Drones 9, no. 3: 222. https://doi.org/10.3390/drones9030222
APA StyleZhang, Y., Sha, H., Peng, R., Li, N., Miao, Z., He, C., & Zhou, J. (2025). Adaptive Observer-Based Neural Network Control for Multi-UAV Systems with Predefined-Time Stability. Drones, 9(3), 222. https://doi.org/10.3390/drones9030222