
Dynamic Event-Triggered-Based Finite-Time Distributed Tracking Control of Networked Multi-UAV Systems



Abstract
:1. Introduction
- (1)
- A novel leader-following consensus control scheme for multi-UAV systems under communication constraints is introduced, which ensures accurate trajectory tracking. The scheme eliminates the need for continuous neighboring state access during controller updates and trigger detections, effectively reducing communication resource consumption. The proposed control scheme guarantees control performance within a finite time, providing a solution for UAVs to swiftly respond to complex situational changes in various collaborative tasks under inevitable directed wireless communication constraints.
- (2)
- A novel DET mechanism is designed by introducing a power term that not only reduces communication overheads but also enhances the convergence rate while avoiding Zeno behavior. Unlike the finite-time consensus under DET mechanisms as presented in [44,45], the designable exponential term introduced in the internal dynamic variable enhances the design flexibility and enables parameter tuning based on performance requirements. In particular, the convergence rate and the triggering frequency can be modified by adjusting the parameters of the triggering function.
- (3)
- The proposed control scheme has been proven to be applicable to general linear MASs under directed network topologies. By using the Lyapunov and finite-time theories, a positive diagonal matrix is introduced to demonstrate the finite-time stability of the closed-loop system, addressing the finite-time leader-following consensus problem based on DET in directed graphs. Compared to the studies referenced in [33,34], this study exhibits strong generality in terms of system models, convergence rate, and topological structure, offering significant theoretical and practical values.
2. Preliminaries
2.1. Graph Theory
2.2. Useful Lemmas
2.3. Problem Formulation
3. Main Results
- (1)
- Complexity of stability analysis: compared to static event triggering mechanisms, the dynamic event-triggered mechanism relies on an internal dynamic variable, so the strong coupling of information within the distributed control protocol and the DET mechanism increases the difficulty of the stability analysis and proof.
- (2)
- Balance between system performance and communication frequency: since event-triggered strategies inherently aim to reduce the frequency of sampled actions and/or control updates, it is a challenge to improve the convergence rate while reducing the communication frequency.
- (3)
- Avoiding Zeno behavior: the event triggering strategy requires rigorous mathematical analysis to exclude Zeno behavior, while the introduction of dynamic variables increases the complexity of excluding Zeno behavior.
3.1. Consensus Tracking Controller Design
3.2. Event-Triggering Function Design
3.3. Stability Analysis
- (1)
- If , the finite-time consensus is achieved prior to the convergence of each agent’s dynamic threshold to zero. Under this condition, the Zeno behavior is excluded for because during this interval. Zeno behavior is naturally non-existent, ensuring that it is excluded at all times.
- (2)
- If , the dynamic thresholds of all agents have already reached zero by the time consensus is established. In this case, Zeno behavior is avoided both prior to and subsequent to .
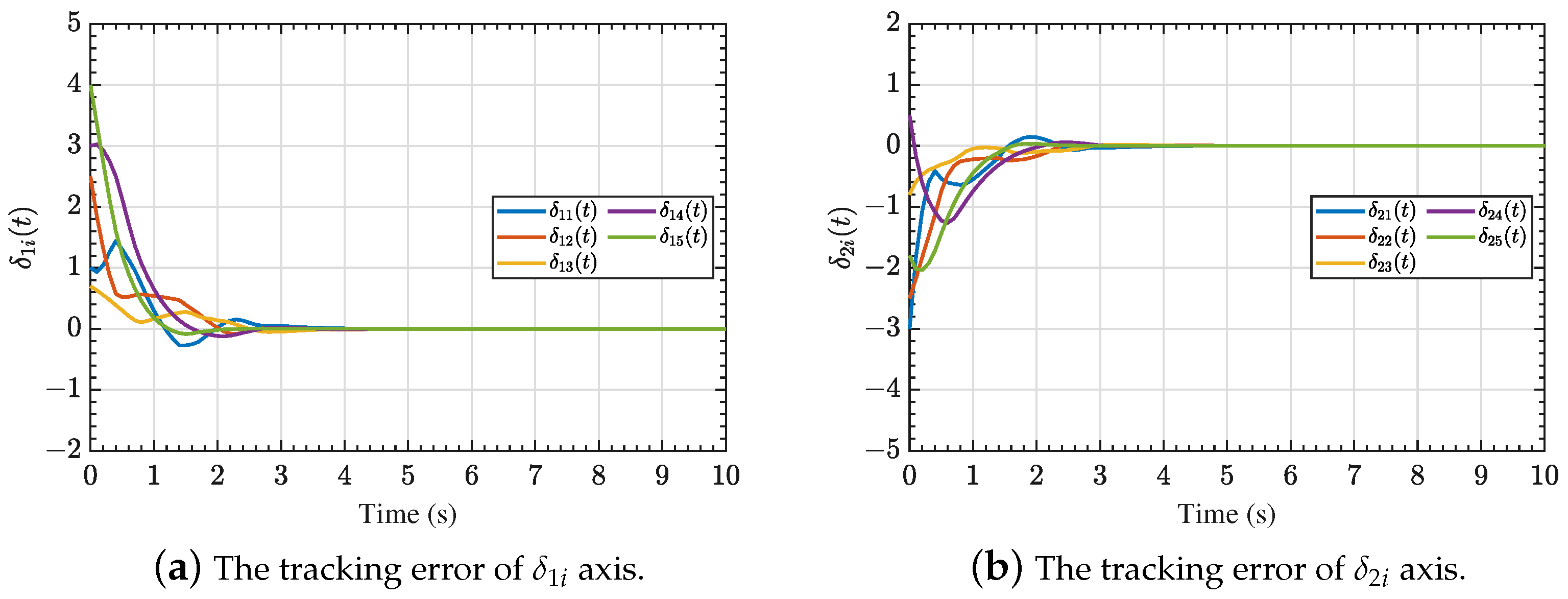
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yue, J.; Qin, K.; Shi, M.; Jiang, B.; Li, W.; Shi, L. Event-trigger-based finite-time privacy-preserving formation control for multi-uav system. Drones 2023, 7, 235. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H. Multi-UAV Formation Search Using Variable Resolution Cognitive Map and Tree-Type Topologies Under Limited Sensing Environments. IEEE Trans. Aerosp. Electron. Syst. 2024, 1–18. [Google Scholar] [CrossRef]
- Li, W.; Yue, J.; Shi, M.; Lin, B.; Qin, K. Neural network-based dynamic target enclosing control for uncertain nonlinear multi-agent systems over signed networks. Neural Netw. 2024, 184, 107057. [Google Scholar] [CrossRef]
- Wu, J.; Yu, Y.; Ma, J.; Wu, J.; Han, G.; Shi, J.; Gao, L. Autonomous cooperative flocking for heterogeneous unmanned aerial vehicle group. IEEE Trans. Veh. Technol. 2021, 70, 12477–12490. [Google Scholar] [CrossRef]
- Khan, N.A.; Jhanjhi, N.; Brohi, S.N.; Usmani, R.S.A.; Nayyar, A. Smart traffic monitoring system using unmanned aerial vehicles (UAVs). Comput. Commun. 2020, 157, 434–443. [Google Scholar] [CrossRef]
- Liu, S.; Bai, Y. Multiple UAVs collaborative traffic monitoring with intention-based communication. Comput. Commun. 2023, 210, 116–129. [Google Scholar] [CrossRef]
- Li, W.; Zhou, S.; Shi, M.; Yue, J.; Lin, B.; Qin, K. Collision avoidance time-varying group formation tracking control for multi-agent systems. Appl. Intell. 2025, 55, 175. [Google Scholar] [CrossRef]
- Xiao, K.; Ma, L.; Tan, S.; Cong, Y.; Wang, X. Implementation of uav coordination based on a hierarchical multi-uav simulation platform. In Proceedings of the Advances in Guidance, Navigation and Control: Proceedings of 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020, Tianjin, China, 23–25 October 2020; pp. 5131–5143.
- Shen, C.; Chang, T.H.; Gong, J.; Zeng, Y.; Zhang, R. Multi-UAV interference coordination via joint trajectory and power control. IEEE Trans. Signal Process. 2020, 68, 843–858. [Google Scholar] [CrossRef]
- Li, W.; Shi, L.; Shi, M.; Yue, J.; Lin, B.; Qin, K. Seeking Secure Synchronous Tracking of Networked Agent Systems Subject to Antagonistic Interactions and Denial-of-Service Attacks. IEEE Trans. Artif. Intell. 2024, 1–11. [Google Scholar] [CrossRef]
- Li, W.; Qin, K.; Li, G.; Shi, M.; Zhang, X. Robust bipartite tracking consensus of multi-agent systems via neural network combined with extended high-gain observer. ISA Trans. 2023, 136, 31–45. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Xue, H.; Gao, S.; Zhang, J. Distributed adaptive consensus tracking control for multi-agent system with communication constraints. IEEE Trans. Parallel Distrib. Syst. 2021, 32, 1293–1306. [Google Scholar] [CrossRef]
- Li, H.; Wu, Y.; Chen, M.; Lu, R. Adaptive multigradient recursive reinforcement learning event-triggered tracking control for multiagent systems. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 144–156. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, C.; Zhao, D.; Sun, B.; Li, Y. Event-triggered consensus control of continuous-time stochastic multi-agent systems. Automatica 2022, 137, 110022. [Google Scholar] [CrossRef]
- Nowzari, C.; Garcia, E.; Cortés, J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1–27. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, H.; Wang, Z.; Huang, C. Distributed event-triggered consensus of general linear multiagent systems under directed graphs. IEEE Trans. Cybern. 2022, 52, 608–619. [Google Scholar] [CrossRef] [PubMed]
- Fan, D.; Zhang, X.; Feng, G.; Li, H. Global Regulation of Feedforward Nonlinear Systems: A Logic-Based Switching Gain Approach. IEEE Trans. Cybern. 2024, 54, 7343–7353. [Google Scholar] [CrossRef]
- Xu, W.; Ho, D.W.; Li, L.; Cao, J. Leader-following consensus of general linear multi-agent systems: Event-triggered schemes. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Deng, C.; Yang, G.H. Leaderless and leader-following consensus of linear multi-agent systems with distributed event-triggered estimators. J. Frankl. Inst. 2019, 356, 309–333. [Google Scholar] [CrossRef]
- Cai, Y.; Zhang, H.; Zhang, J.; He, Q. Distributed bipartite leader-following consensus of linear multi-agent systems with input time delay based on event-triggered transmission mechanism. ISA Trans. 2020, 100, 221–234. [Google Scholar] [CrossRef]
- Dai, J.; Guo, G. Event-triggered leader-following consensus for multi-agent systems with semi-Markov switching topologies. Inf. Sci. 2018, 459, 290–301. [Google Scholar] [CrossRef]
- Xu, W.; Ho, D.W.; Li, L.; Cao, J. Event-triggered schemes on leader-following consensus of general linear multiagent systems under different topologies. IEEE Trans. Cybern. 2017, 47, 212–223. [Google Scholar] [CrossRef]
- Mazo, M.; Tabuada, P. Decentralized Event-Triggered Control Over Wireless Sensor/Actuator Network. IEEE Trans. Autom. Control 2011, 56, 2456–2461. [Google Scholar] [CrossRef]
- Mazo, M.; Tabuada, P. On event-triggered and self-triggered control over sensor/actuator networks. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 435–440. [Google Scholar]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef]
- Ristevski, S.; Yucelen, T.; Muse, J.A. An event-triggered distributed control architecture for scheduling information exchange in networked multiagent systems. IEEE Trans. Control Syst. Technol. 2022, 30, 1090–1101. [Google Scholar] [CrossRef]
- Yi, X.; Liu, K.; Dimarogonas, D.V.; Johansson, K.H. Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2019, 64, 3300–3307. [Google Scholar] [CrossRef]
- Yi, X.; Liu, K.; Dimarogonas, D.V.; Johansson, K.H. Distributed dynamic event-triggered control for multi-agent systems. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 6683–6698. [Google Scholar]
- Liu, K.; Ji, Z. Dynamic event-triggered consensus of general linear multi-agent systems with adaptive strategy. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3440–3444. [Google Scholar] [CrossRef]
- Hu, W.; Yang, C.; Huang, T.; Gui, W. A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks. IEEE Trans. Cybern. 2020, 50, 869–874. [Google Scholar] [CrossRef]
- Wu, X.; Mao, B.; Wu, X.; Lu, J. Dynamic event-triggered leader-follower consensus control for multiagent systems. SIAM J. Control Optim. 2022, 60, 189–209. [Google Scholar] [CrossRef]
- Li, Y.; Liu, X.; Liu, H.; Du, C.; Lu, P. Distributed dynamic event-triggered consensus control for multi-agent systems under fixed and switching topologies. J. Frankl. Inst. 2021, 358, 4348–4372. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G.H. A Dynamic Event-Triggered Control Approach to Leader-Following Consensus for Linear Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6271–6279. [Google Scholar] [CrossRef]
- Du, S.L.; Liu, T.; Ho, D.W.C. Dynamic Event-Triggered Control for Leader-Following Consensus of Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3243–3251. [Google Scholar] [CrossRef]
- Ding, L.; Han, Q.L.; Ge, X.; Zhang, X.M. An overview of recent advances in event-triggered consensus of multiagent systems. IEEE Trans. Cybern. 2018, 48, 1110–1123. [Google Scholar] [CrossRef] [PubMed]
- Zuo, Z.; Han, Q.L.; Ning, B.; Ge, X.; Zhang, X.M. An overview of recent advances in fixed-time cooperative control of multiagent systems. IEEE Trans. Ind. Inform. 2018, 14, 2322–2334. [Google Scholar] [CrossRef]
- Zhang, H.; Yue, D.; Yin, X.; Hu, S.; Dou, C.x. Finite-time distributed event-triggered consensus control for multi-agent systems. Inf. Sci. 2016, 339, 132–142. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, W.; Ma, L. Finite-time consensus for the second-order leader-following nonlinear multi-agent system with event-triggered communication. J. Frankl. Inst. 2022, 359, 6486–6502. [Google Scholar] [CrossRef]
- Zhang, A.; Zhou, D.; Yang, P.; Yang, M. Event-triggered finite-time consensus with fully continuous communication free for second-order multi-agent systems. Int. J. Control. Autom. Syst. 2019, 17, 836–846. [Google Scholar] [CrossRef]
- Han, Q.; Zhou, Y.S.; Tang, Y.X.; Tuo, X.G.; He, P. Event-Triggered Finite-Time Sliding Mode Control for Leader-Following Second-Order Nonlinear Multi-Agent Systems. IEEE Open J. Intell. Transp. Syst. 2022, 3, 570–579. [Google Scholar] [CrossRef]
- Cao, Z.; Li, C.; Wang, X.; Huang, T. Finite-time consensus of linear multi-agent system via distributed event-triggered strategy. J. Frankl. Inst. 2018, 355, 1338–1350. [Google Scholar] [CrossRef]
- Du, C.; Liu, X.; Ren, W.; Lu, P.; Liu, H. Finite-time consensus for linear multiagent systems via event-triggered strategy without continuous communication. IEEE Trans. Control Netw. Syst. 2020, 7, 19–29. [Google Scholar] [CrossRef]
- Liu, H.; Du, C.; Liu, X.; Lu, P. Distributed finite-time consensus control of multiagent systems with fully intermittent communication via dynamic event-triggered strategy. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4364–4368. [Google Scholar] [CrossRef]
- Wen, L.; Yu, S.; Zhao, Y.; Yan, Y. Finite-time dynamic event-triggered consensus of multi-agent systems with disturbances via integral sliding mode. Int. J. Control 2023, 96, 272–281. [Google Scholar] [CrossRef]
- Luo, Y.; Pang, J.; Cao, J.; Yao, Y. Finite-time dynamic event-triggered consensus of multi-agent systems with mismatched disturbances based on disturbance observer. J. Frankl. Inst. 2023, 360, 10876–10892. [Google Scholar] [CrossRef]
- Luo, Y.; Pang, J. Observer-based event-triggered finite-time consensus for general linear leader-follower multi-agent systems. Adv. Contin. Discret. Model. 2022, 2022, 40. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Li, X.; Zhao, Y. Finite-time consensus for nonholonomic multi-agent systems with disturbances via event-triggered integral sliding mode controller. J. Frankl. Inst. 2020, 357, 7779–7795. [Google Scholar] [CrossRef]
- Hardy, G.H.; Littlewood, J.E.; Pólya, G.; Pólya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Xu, B.; He, W.; Ye, D. Event-triggered consensus for general linear leader-following multi-agent systems under directed topologies. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5971–5976. [Google Scholar]
- Li, Z.; Wen, G.; Duan, Z.; Ren, W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Trans. Autom. Control 2015, 60, 1152–1157. [Google Scholar] [CrossRef]
- Garcia, E.; Cao, Y.; Casbeer, D.W. Decentralized event-triggered consensus with general linear dynamics. Automatica 2014, 50, 2633–2640. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
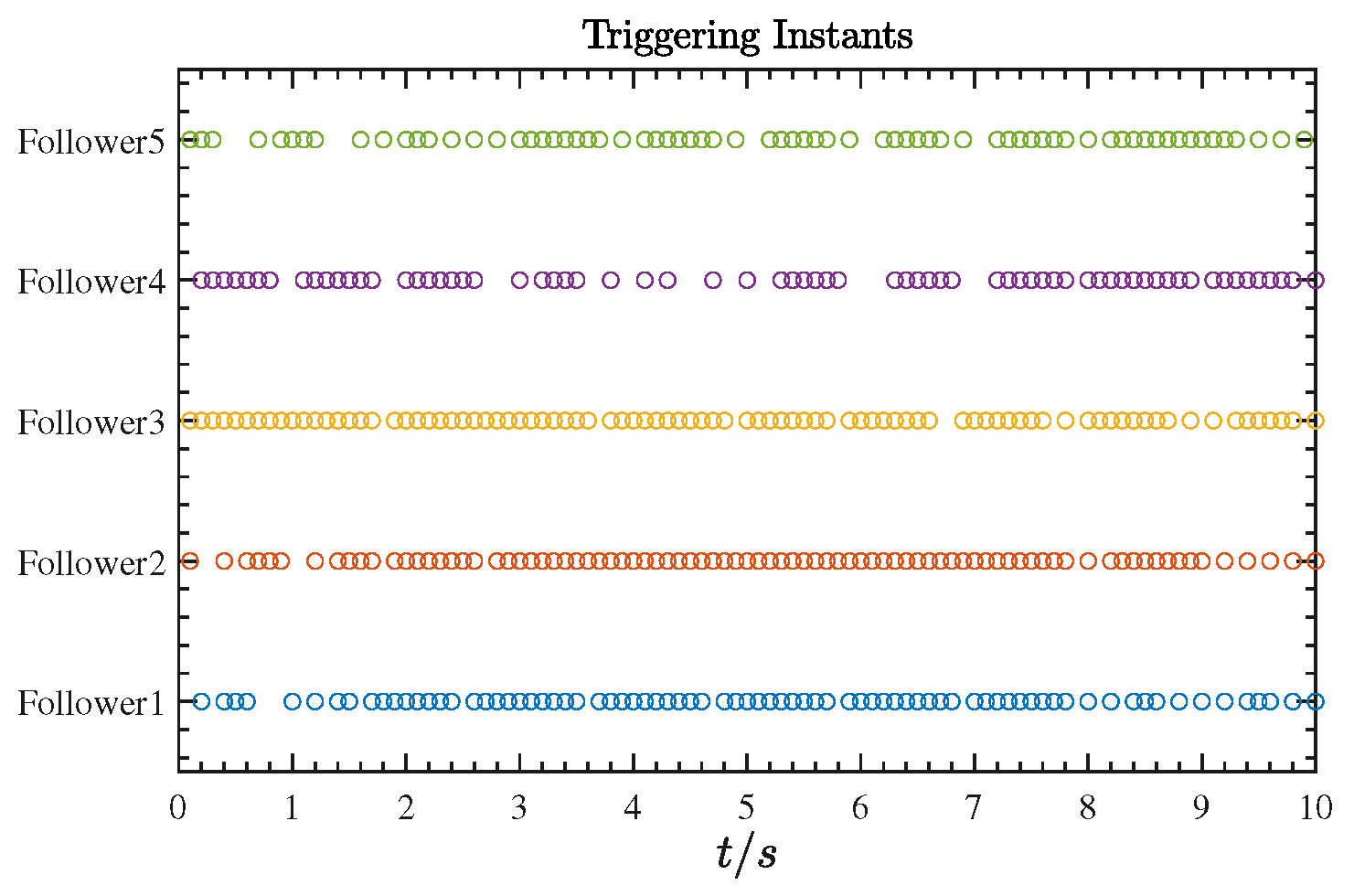
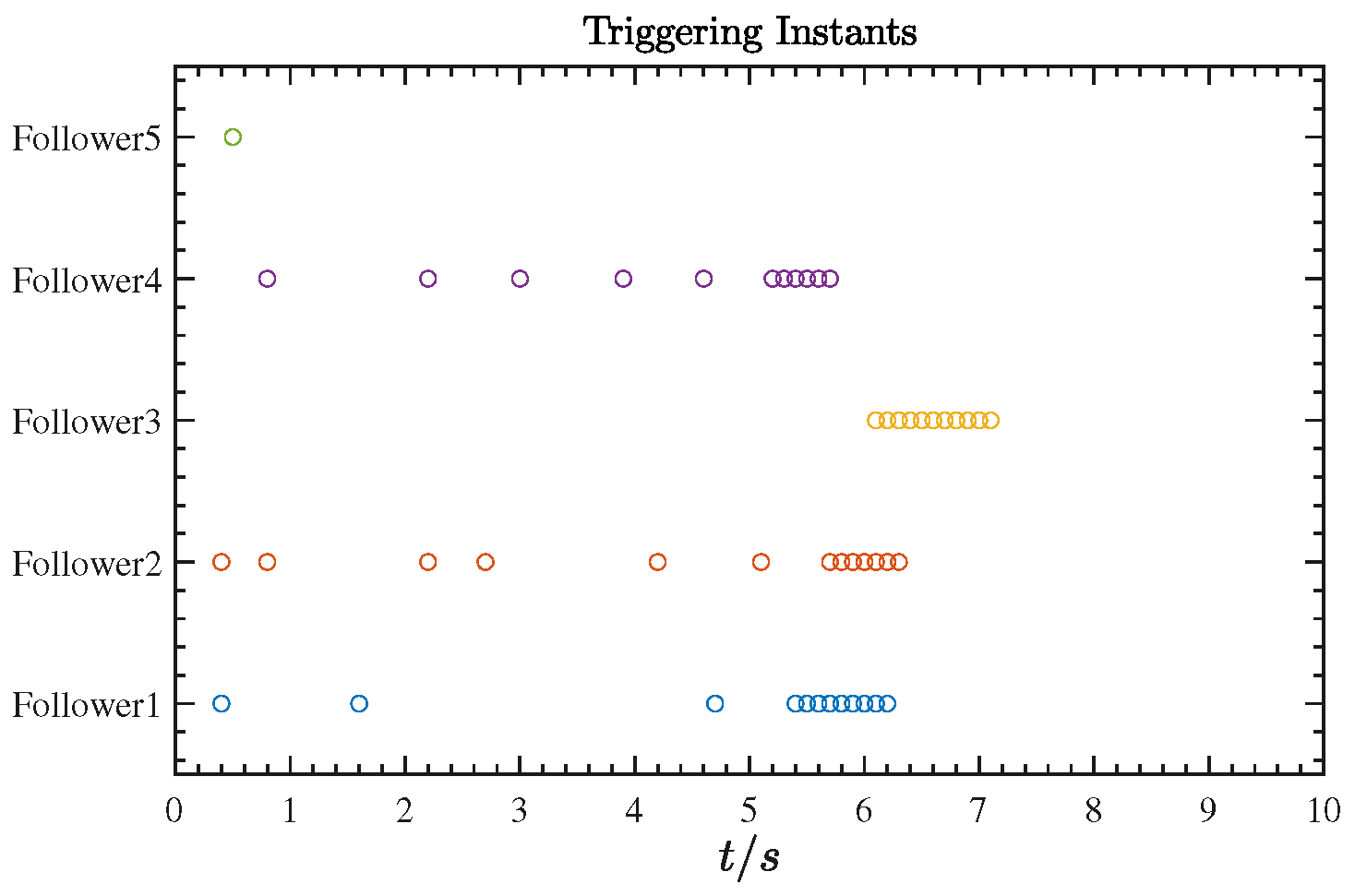
| Follower | Follower 1 | Follower 2 | Follower 3 | Follower 4 | Follower 5 |
|---|---|---|---|---|---|
| DET with | 19 | 14 | 8 | 11 | 1 |
| DET with | 12 | 13 | 11 | 11 | 1 |
| ET | 78 | 85 | 88 | 69 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, R.; Luo, Z.; Lin, B.; Li, M.; Shi, M.; Qin, K. Dynamic Event-Triggered-Based Finite-Time Distributed Tracking Control of Networked Multi-UAV Systems. Drones 2025, 9, 89. https://doi.org/10.3390/drones9020089
Ren R, Luo Z, Lin B, Li M, Shi M, Qin K. Dynamic Event-Triggered-Based Finite-Time Distributed Tracking Control of Networked Multi-UAV Systems. Drones. 2025; 9(2):89. https://doi.org/10.3390/drones9020089
Chicago/Turabian StyleRen, Ruichi, Zhenbing Luo, Boxian Lin, Meng Li, Mengji Shi, and Kaiyu Qin. 2025. "Dynamic Event-Triggered-Based Finite-Time Distributed Tracking Control of Networked Multi-UAV Systems" Drones 9, no. 2: 89. https://doi.org/10.3390/drones9020089
APA StyleRen, R., Luo, Z., Lin, B., Li, M., Shi, M., & Qin, K. (2025). Dynamic Event-Triggered-Based Finite-Time Distributed Tracking Control of Networked Multi-UAV Systems. Drones, 9(2), 89. https://doi.org/10.3390/drones9020089