



A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments

Abstract
1. Introduction
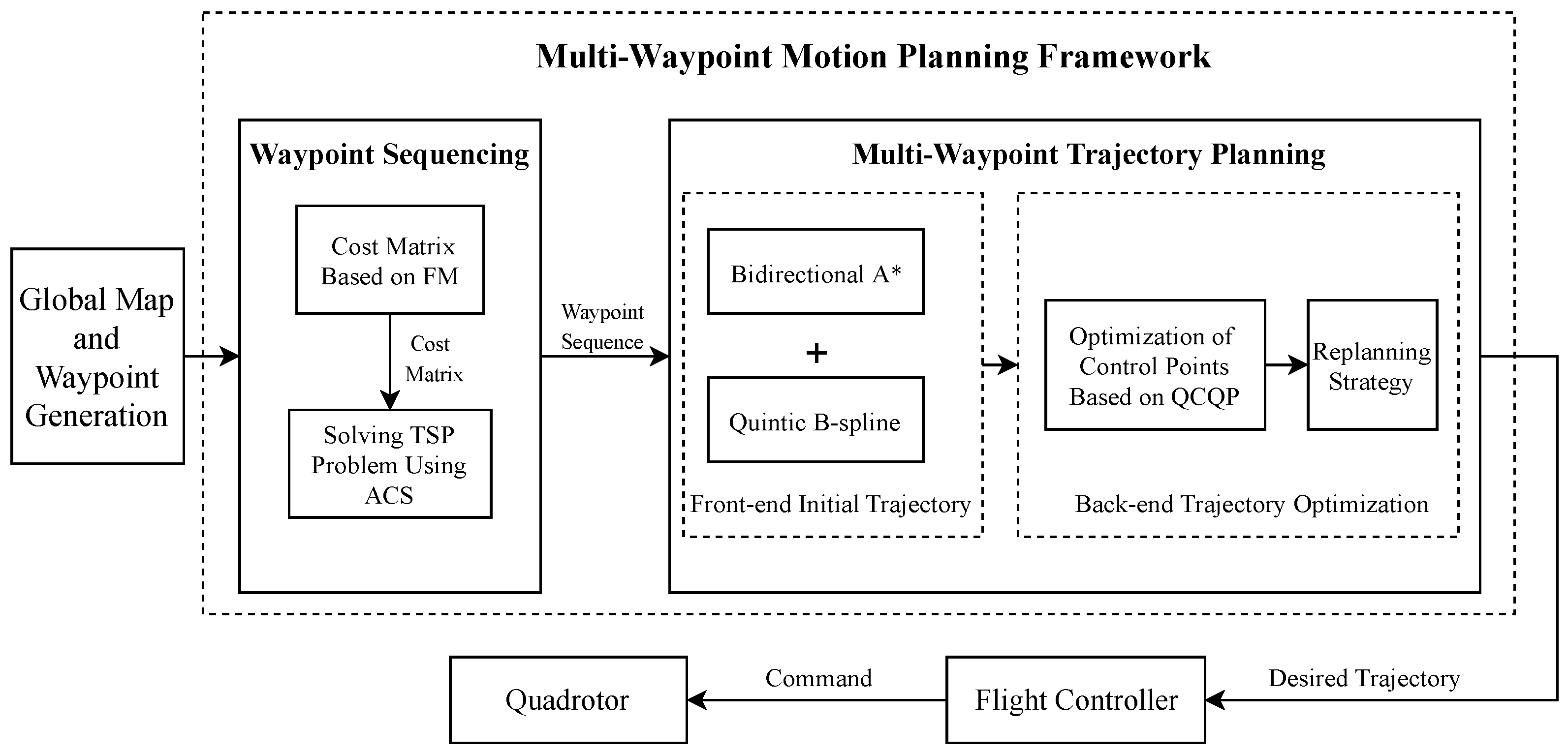
- We design a multi-waypoint trajectory planning method. We refine the bidirectional A* method with kinodynamic constraints, framing trajectory generation as a B-spline control point placement problem to achieve initial kinodynamically feasible trajectories, and QCQP is used to optimize the coordinates of the control points. During this process, the MINVO-based generation of the minimum convex hull of B-spline curves is employed to enlarge the solution space and avoid overly conservative trajectories.
- We design a method for determining waypoint sequences. While maintaining consistency with the objectives and constraints of multi-waypoint trajectory planning, we utilize the FM method to establish a cost matrix. ACO is then applied to solve this variant of TSP, yielding the waypoint sequence with the shortest time.
- We propose a multi-waypoint motion planning framework incorporating the aforementioned two components. We validate the effectiveness of our proposed method and this framework through extensive simulation experiments.
2. Related Works
3. B-Spline-Based Bidirectional A* Trajectory Planning
3.1. B-Spline Curves
3.2. B-Spline-Based Bidirectional A* Search
| Algorithm 1: BA*-BS Search Method |
 |
3.2.1. Initial Node and Terminal Node
- Waypoints closer to the have a greater impact on .
- Make sure that does not exceed . Its magnitude is determined by the minimum distance between and the adjacent waypoints.
3.2.2. Adaptive Expansion
3.2.3. Cost Function
3.2.4. Dynamic Feasibility Checking
3.3. QCQP Optimization
- (1)
- Objective function:
- (2)
- Dynamic feasibility constraints:
- (3)
- Boundary constraints:
- (4)
- Safety constraints:
3.4. Replanning Strategy
4. FM-ACO Waypoint Sequencing
4.1. FM-Constructed Cost Matrix
4.2. ACO for Sequence Determination
- (1)
- Path selection:
- (2)
- Global pheromone update strategy:
- (3)
- Local pheromone update strategy:
5. Experiment and Results
5.1. Experiment Settings
5.2. Trajectory Planning
5.3. Waypoint Sequencing
5.4. Robustness Analysis
5.5. Complexity Analysis
6. Discussion
- Different shapes of obstacles may introduce varying computational complexities. In our experiments, we only used cylindrical obstacles, which, to some extent, facilitate the efficiency of the search process of A*. However, in the real world, obstacles come in various forms, such as maze-like obstacles, which can significantly increase the search time of A*.
- In reality, waypoints and environments can be dynamic. In our experiments, we only consider static environments and obstacles. In actual missions, dynamic environments and waypoints may be encountered. Future work will focus on improving waypoint sequencing and trajectory planning methods to address these aspects, further enhancing real-time performance and expanding the applicability of our framework.
- The dynamic model of quadrotor drones can be made more realistic. Our current dynamic model is relatively simple, considering only three-dimensional velocity and acceleration limits. However, in reality, more practical factors need to be considered, including maximum motor speed and thrust, aerodynamic effects, and battery power. These factors significantly impact the quadrotor drone’s motion state and trajectory planning.
- Multi-quadrotor coordination is also an important research direction. In practical applications, multiple quadrotors often need to work together to complete complex tasks. For example, in search and rescue missions, multiple quadrotors need to coordinate searches and task allocation, posing higher demands on waypoint sequencing and trajectory planning. Future work can explore multi-waypoint motion planning problems considering multi-quadrotor coordination, studying efficient coordination strategies and distributed planning algorithms.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Richter, C.; Bry, A.; Roy, N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In Robotics Research: The 16th International Symposium ISRR; Springer: Berlin/Heidelberg, Germany, 2016; pp. 649–666. [Google Scholar]
- Gao, F.; Wu, W.; Lin, Y.; Shen, S. Online safe trajectory generation for quadrotors using fast marching method and bernstein basis polynomial. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 344–351. [Google Scholar]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Tang, L.; Wang, H.; Liu, Z.; Wang, Y. A real-time quadrotor trajectory planning framework based on B-spline and nonuniform kinodynamic search. J. Field Robot. 2021, 38, 452–475. [Google Scholar] [CrossRef]
- Liu, S.; Atanasov, N.; Mohta, K.; Kumar, V. Search-based motion planning for quadrotors using linear quadratic minimum time control. In Proceedings of the 2017 IEEE/RSJ international Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2872–2879. [Google Scholar]
- Rousseau, G.; Maniu, C.S.; Tebbani, S.; Babel, M.; Martin, N. Minimum-time B-spline trajectories with corridor constraints. Application to cinematographic quadrotor flight plans. Control Eng. Pract. 2019, 89, 190–203. [Google Scholar] [CrossRef]
- Foehn, P.; Romero, A.; Scaramuzza, D. Time-optimal planning for quadrotor waypoint flight. Sci. Robot. 2021, 6, eabh1221. [Google Scholar] [CrossRef] [PubMed]
- Penicka, R.; Scaramuzza, D. Minimum-time quadrotor waypoint flight in cluttered environments. IEEE Robot. Autom. Lett. 2022, 7, 5719–5726. [Google Scholar] [CrossRef]
- Yu, X.; Chen, W.N.; Gu, T.; Yuan, H.; Zhang, H.; Zhang, J. ACO-A*: Ant colony optimization plus A* for 3-D traveling in environments with dense obstacles. IEEE Trans. Evol. Comput. 2018, 23, 617–631. [Google Scholar] [CrossRef]
- Fu, J.; Sun, G.; Liu, J.; Yao, W.; Wu, L. On hierarchical multi-UAV dubins traveling salesman problem paths in a complex obstacle environment. IEEE Trans. Cybern. 2023, 54, 123–135. [Google Scholar] [CrossRef] [PubMed]
- Tsai, H.C.; Hong, Y.W.P.; Sheu, J.P. Completion time minimization for UAV-enabled surveillance over multiple restricted regions. IEEE Trans. Mob. Comput. 2022, 22, 6907–6920. [Google Scholar] [CrossRef]
- Kong, S.; Wu, Z.; Qiu, C.; Tian, M.; Yu, J. An FM*-Based Comprehensive Path Planning System for Robotic Floating Garbage Cleaning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23821–23830. [Google Scholar] [CrossRef]
- Tordesillas, J.; How, J.P. MINVO basis: Finding simplexes with minimum volume enclosing polynomial curves. Comput.-Aided Des. 2022, 151, 103341. [Google Scholar] [CrossRef]
- Qin, K. General matrix representations for B-splines. In Proceedings of the Pacific Graphics’ 98, Sixth Pacific Conference on Computer Graphics and Applications (Cat. No. 98EX208), Singapore, 26–29 October 1998; pp. 37–43. [Google Scholar]
- Pohl, I. Bi-Directional Search; IBM TJ Watson Research Center: Yorktown Heights, NY, USA, 1970. [Google Scholar]
- Bellingham, J.; Richards, A.; How, J.P. Receding horizon control of autonomous aerial vehicles. In Proceedings of the of the 2002 American control conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 5, pp. 3741–3746. [Google Scholar]
- Valero-Gomez, A.; Gomez, J.V.; Garrido, S.; Moreno, L. The path to efficiency: Fast marching method for safer, more efficient mobile robot trajectories. IEEE Robot. Autom. Mag. 2013, 20, 111–120. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Dorigo, M.; Blum, C. Ant colony optimization theory: A survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Avg.Traj.Time (s) | Avg.Planning Time (s) | Avg.Energy (m2/s5) | Avg.Length (m) |
|---|---|---|---|---|
| polynomial | 75.521 | 25.820 | 20.284 | 91.927 |
| A*-BS | 66.960 | 7.298 | 20.672 | 90.068 |
| 1*BA*-BS | 66.555 | 3.865 | 22.493 | 89.863 |
| Method | Avg.Traj.Time (s) | Avg.Planning Time (s) | Avg.Energy (m2/s5) | Avg.Length (m) | Avg.Cost Matrix Time (s) | Avg.ACO Time (s) |
|---|---|---|---|---|---|---|
| A*-ACO | 69.003 | 8.174 | 29.758 | 90.135 | 9.190 | 0.520 |
| FM-ACO | 67.329 | 3.898 | 24.496 | 90.515 | 4.127 | 0.523 |
| m | N.CO = 50 | N.CO = 100 | N.CO = 150 | |||
|---|---|---|---|---|---|---|
| Traj.T(s) | Plan.T(s) | Traj.T(s) | Plan.T(s) | Traj.T(s) | Plan.T(s) | |
| 5 | 40.95 | 0.845 | 45 | 2.81 | 44.55 | 2.925 |
| 10 | 51.75 | 1.24 | 56.7 | 4.465 | 61.65 | 5.673 |
| 15 | 68.85 | 1.451 | 70.2 | 4.055 | 75.15 | 5.441 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, D.; Shen, J.; Gao, M.; Yang, X. A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments. Drones 2024, 8, 414. https://doi.org/10.3390/drones8080414
Shi D, Shen J, Gao M, Yang X. A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments. Drones. 2024; 8(8):414. https://doi.org/10.3390/drones8080414
Chicago/Turabian StyleShi, Delong, Jinrong Shen, Mingsheng Gao, and Xiaodong Yang. 2024. "A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments" Drones 8, no. 8: 414. https://doi.org/10.3390/drones8080414
APA StyleShi, D., Shen, J., Gao, M., & Yang, X. (2024). A Multi-Waypoint Motion Planning Framework for Quadrotor Drones in Cluttered Environments. Drones, 8(8), 414. https://doi.org/10.3390/drones8080414