
Unmanned Aerial Vehicle Obstacle Avoidance Based Custom Elliptic Domain

Abstract
1. Introduction
1.1. Related Prior Work
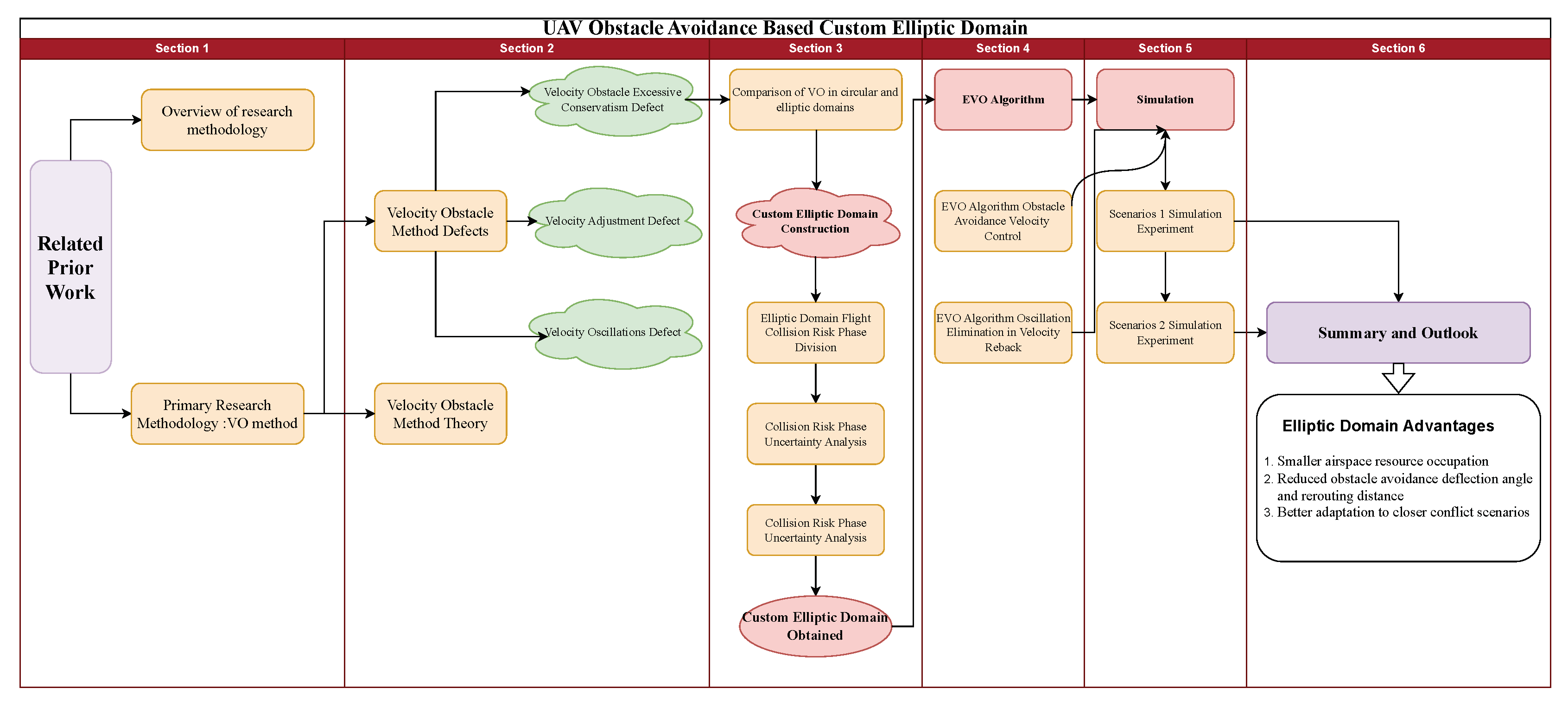
1.2. Organization
2. Review of Velocity Obstacle Method
2.1. Velocity Obstacle Method Theory
2.1.1. Minkowski Sum
2.1.2. Velocity Obstacle Cone Construction
2.2. Velocity Obstacle Method Defects
2.2.1. Velocity Obstacle Excessive Conservatism Defect
2.2.2. Velocity Adjustment Defect
2.2.3. Velocity Oscillation Defects
2.3. Our Contributions
3. Custom Elliptic Domain Construction
3.1. Comparison of VO in Circular and Elliptic Domains
- The mathematical principle of the velocity obstacle space is the Minkowski sum of the boundary curves of two spatial objects. Geometrically, the Minkowski sum of two colliding entities represents the region swept by object A along the boundary of object B as it moves continuously for one revolution, combined with object B.
- When both objects are circles, their Minkowski sum is a circle with a radius equal to the sum of the radii of the two objects. For circles of the same size, their Minkowski sum is a circle with twice the radius.
- Based on the proof that the Minkowski sum of two circles remains a circle, it can be anticipated that the precise calculation of the Minkowski sum and velocity obstacle cone for two elliptical objects will be more difficult. The reason for this is that in Equation (A1), the radius ‘r’ becomes the non-uniform semi-axis of the ellipse, making it challenging to simplify the computation of the maximum value. The distances from any point on ellipse A to the farthest point from the center of ellipse B obtained through iterative calculations will vary, indicating that the boundary of the Minkowski sum of two ellipses may not possess simple geometric characteristics. Therefore, further algorithmic solutions are required to address the velocity obstacle for elliptical boundaries.
3.1.1. Description of UAV Collision Stations
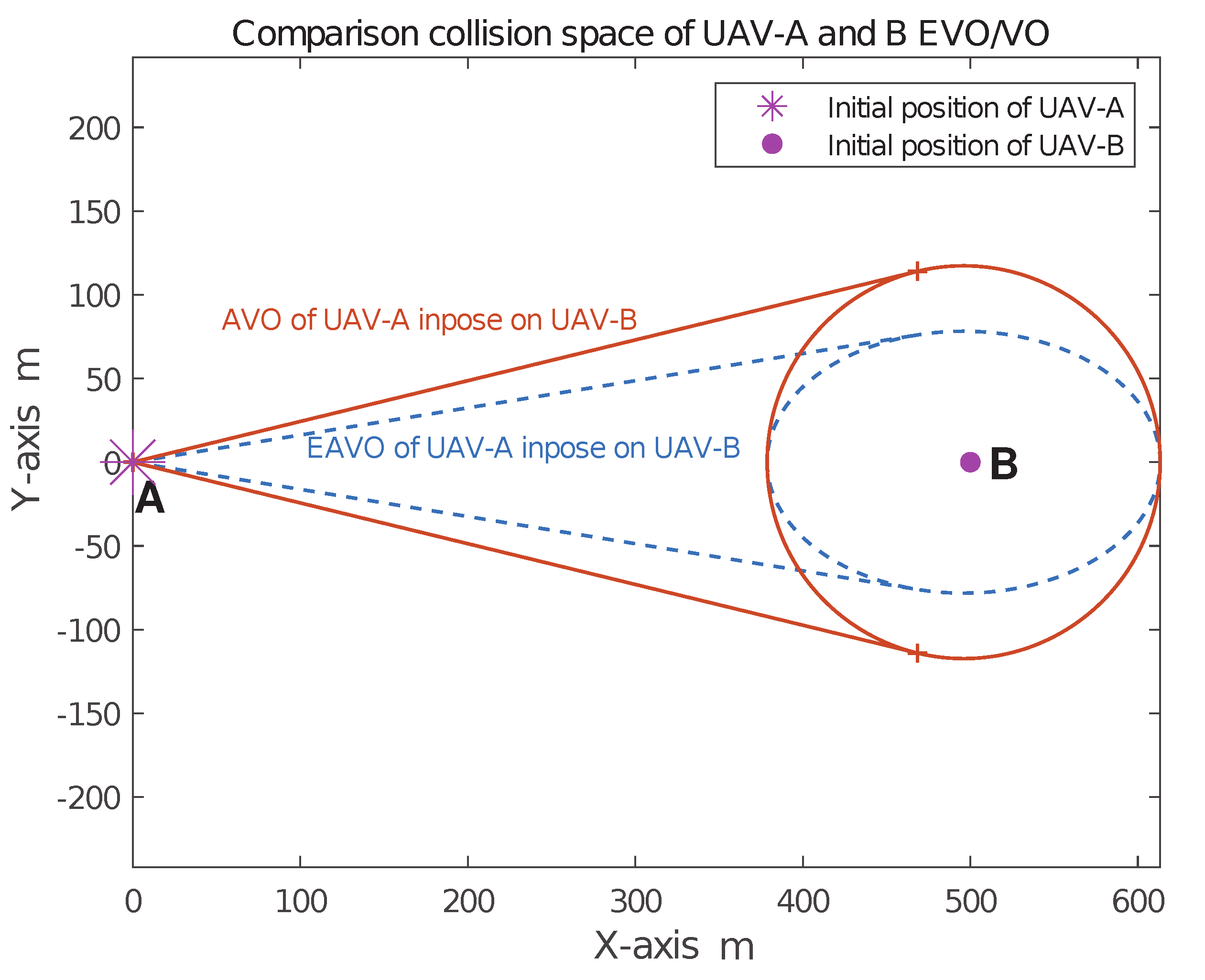
3.1.2. Comparison of UAV Collision Stations
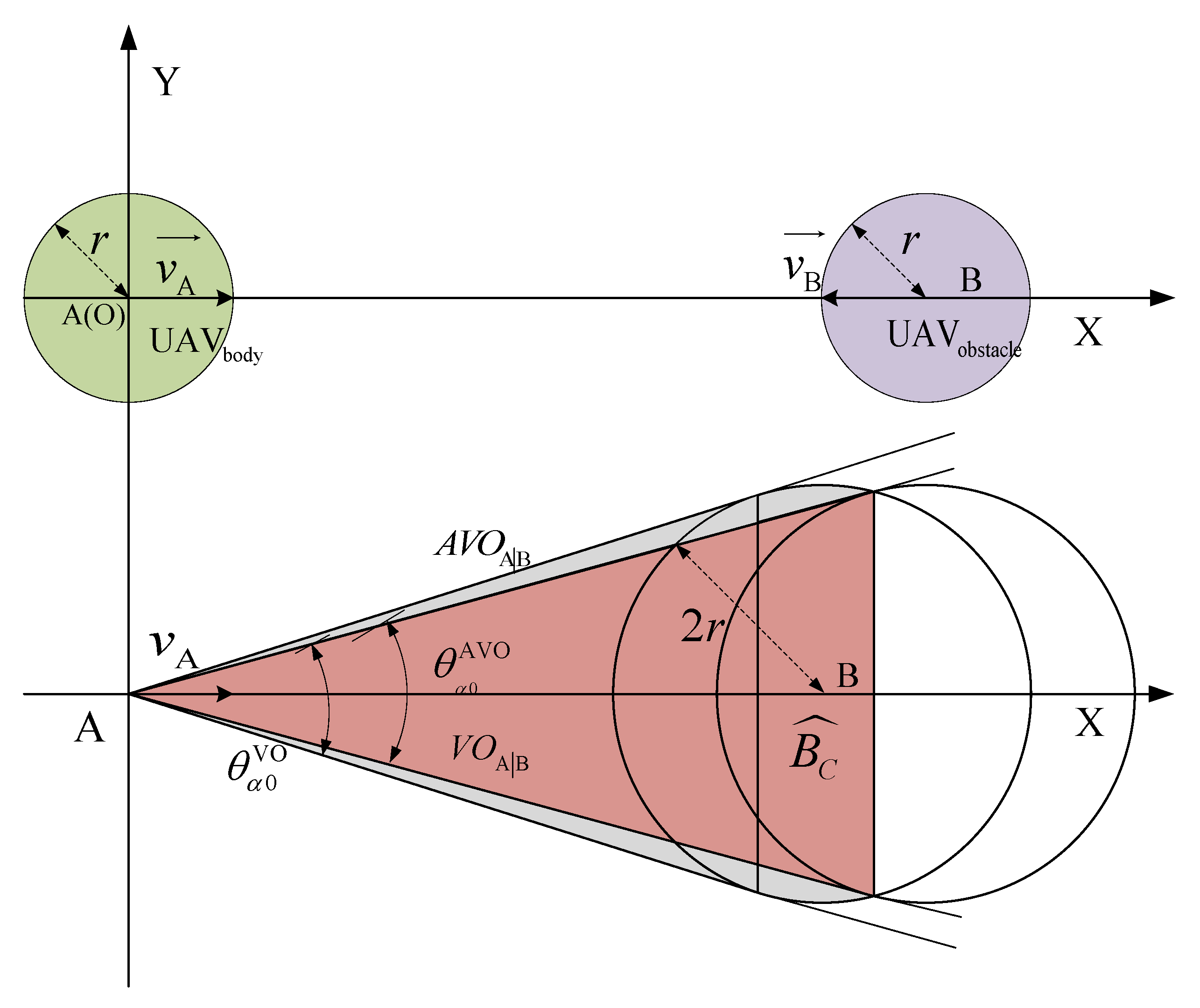
- Comparison of station and station : A and B both have circular protective domains. In the same collision scenario, the double protective domain of B in station will cause a significantly larger velocity obstacle space compared to station . The target avoidance velocity obtained in station will require a greater angular deviation. Therefore, a critical issue in applying the velocity obstacle principle to ensure collision-free operation for UAVs is determining the appropriate range of these protective domains. It is clear that avoidance decisions and outcomes are sensitive to the initial radius of this area. If the protective domain is too large, it compresses the available free space, leading to increased avoidance costs. Conversely, if the protective domain is too small, the performance requirements for the UAV during avoidance maneuvers increase, along with associated safety risks. Exploring a suitable and safe structure for the protective domain is a primary focus of this research.
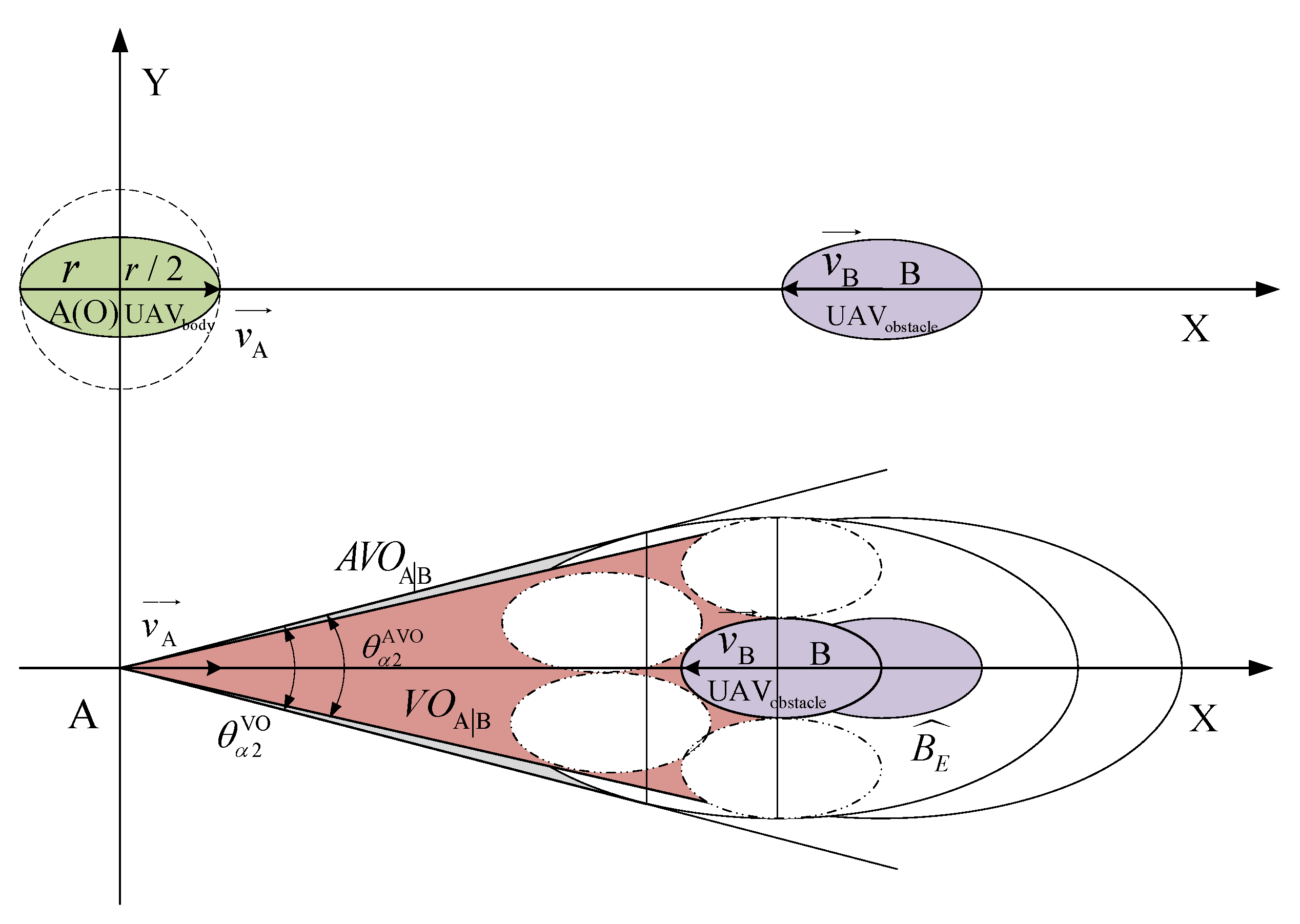
- Comparison of station and station : While maintaining a constant protective distance in the direction of the speed, the protective distance in the normal direction of the speed is reduced. Consequently, the absolute speed obstacle angle is also decreased. This indicates that constructing a collision-free zone in the shape of an elliptical domain with a short axis can not only ensure safe obstacle avoidance but also minimize the utilization of airspace resources.
- Comparison of station and station : In station , the elliptical domain completely encompasses the circular domain from station , resulting in a velocity obstacle space that also covers the velocity obstacle space obtained from the circular domain. In station , the protective distance in the normal direction of the speed remains at r, while the protective distance in the velocity direction increases by . As a result, the velocity obstacle angle also increases accordingly. This demonstrates that both axes of the ellipse have an impact on the calculated results of the velocity obstacle space.
3.2. Elliptic Domain Flight Collision Risk Phase Division
3.3. Collision Risk Phase Uncertainty Analysis
3.3.1. Collision Risk Phase Uncertainty Assumptions
- Assumption 1: Segmented Multiple Tiny DeflectionsAssume that the drone’s directional adjustments are linearly varied over each time interval. Segmented, multiple, tiny deflections provide a smoother representation of the actual flight process. This method suggests that the angular velocity during the deflection process remains constant throughout each tiny time interval. The UAV produces consistent angles of deflection over identical, short periods, with the cumulative deflection angle increasing incrementally. Simply put, Assumption 1 is a gradual deflection process, which corresponds to the blue line in Figure 9.
- Assumption 2: Deflection Along the Average Deflection AngleDeflection along the average deflection angle means that the UAV is oriented towards the target with the average angle of Assumption 1. The endpoint of the blue line in Figure 9 represents the flight position obtained from Assumption 1, and the heading angle towards this endpoint from the initial position is denoted as . The UAV will fly along this direction instantly when the risk of collision is detected, which corresponds to the red dashed line in the middle of Figure 9.
- Assumption 3: Deflected Along the Target Deflection AngleThis assumption is the default assumption of the VO method. It specifies that upon detecting a collision threat, the UAV will immediately navigate in the direction of a velocity selected outside the AVO, which is named as the target deflection angle. In simple terms, the drone initially adjusts its heading to fly along the final flight angle defined by Assumption 1, which corresponds to the red dashed line at the bottom of Figure 9.The flight process for a given time interval under the three assumptions is demonstrated in Figure 9. It is obvious that the flight endpoints are different across the three different assumptions.
3.3.2. Collision Risk Phase Error Expression Derivation
3.3.3. Collision Risk Phase Error Analysis
3.4. Elliptic Domain Size Construction Considering Uncertainty Errors
4. EVO Algorithm-Based Custom Elliptic Domains
4.1. EVO Algorithm Preparations
4.2. EVO Algorithm Steps
- Step 1: Computation of Minkowski sum and convex hull boundary points
- Step 2: Finding the approximate EVO space tangent line
- Step 3: Return EVO space tangent points
- Step 4: Computation of EAVO
4.3. EVO Algorithm Obstacle Avoidance Velocity Control
4.4. EVO Algorithm Oscillation Elimination in Velocity Reback
- Solution 1: Find an optimal position at which UAV-A initiates obstacle avoidance to ensure safety. Concurrently, UAVs A and B pass each other, ensuring that subsequent conditions satisfy . This approach prevents the occurrence of velocity oscillations. However, determining this optimal position introduces another layer of complexity, which this article will not explore in detail at this time.
- Solution 2: We impose a constraint on UAV-A to continue moving in the direction of the avoidance velocity until UAVs A and B have passed each other, after completing the avoidance maneuver. This approach simplifies the management of UAV trajectories, ensuring that the avoidance maneuver results in a successful and stable transition. Therefore, we have the constraint of mutual passing. After completing the initial obstacle avoidance, UAV-A’s velocity direction is continuously adjusted towards the endpoint, ensuring a smooth flight without the need for secondary obstacle avoidance maneuvers. The adjustment processes still need to satisfy the limit of deflection:
5. Simulation
5.1. VO and EVO Obstacle Avoidance Evaluation Indicators
5.2. UAV Simulation Parameters
5.3. Simulations and Conclusions
5.3.1. Scenarios 1 Simulation Experiment
5.3.2. Scenarios 2 Simulation Experiment
5.4. Defects of Custom Elliptic Domains for Proximity UAVs
6. Summary and Outlook
- Custom protection domains for arbitrary flight scenarios
- The lower limit of the elliptic protection domain
- Exploring elliptical domain applications in more complex experimental scenarios
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial vehicle |
| VO | Velocity obstacles method |
| EVO | Elliptical velocity obstacles method |
| RVO | Reciprocal velocity obstacles method |
| VO | Relative velocity obstacle cone in the circle domain |
| AVO | Absolute velocity obstacle cone in the circle domian |
| EVO | Relative velocity obstacle cone in th elliptic domain |
| EAVO | Absolute velocity obstacle cone in the elliptic domian |
Appendix A. Instruction and Analysis
Appendix A.1. Convex Polygons Minkowski Sum Methods
- Method 1: For the set of points formed by the boundary points of A and B , m and n represent the number of elements in the point set, respectively, and the new point set generated by the corresponding addition contains at most mn elements. The convex hull of the new point set is the Minkowski sum of A and B. Its complexity is .
- Method 2: For the set of vectors to the boundary of A and B , calculating the Minkowski sum of two convex sets is simply a matter of joining and merging the ‘m + n’ edge vectors after sorting them by their polar angles and then connecting and merging them in descending order of polar angle size. It can be guaranteed that the resulting graph is still convex, and the resulting convex hull is the Minkowski sum of A, B. Its complexity is .
Appendix A.2. VO Space ‘Expanding’ to Twice under Two Identical Circle Domains
Appendix A.3. Descriptions of the Symbols Used in the Text
| Velocity obstacle space imposed by A on B in the circle domian | |
| Velocity obstacle space imposed by A on B in the elliptic domian | |
| Length of the major and minor semi-axes of the ellipse | |
| Arbitrary length time slice | |
| Time slice sequence | |
| Time slice for the UAV to return to the endpoint | |
| Maximum deflection angle of the UAV in one second | |
| UAV flight endpoint error under Assumptions 1 and 2 | |
| UAV flight endpoint error under Assumptions 2 and 3 | |
| Velocities of UAVs A and B at moment | |
| Elliptic velocity obstacle tangent direction | |
| Projected distance between the two ellipses in the direction of the minor axis at |
References
- Fu, Q.; Liang, X.; Zhang, J.; Hou, Y. Cooperative conflict detection and resolution for multiple UAVs using two-layer optimization. Harbin Gongye Daxue Xuebao/J. Harbin Inst. Technol. 2020, 52, 74–83. [Google Scholar]
- Sarim, M.; Radmanesh, M.; Dechering, M.; Kumar, M.; Pragada, R.; Cohen, K. Distributed detect-and-avoid for multiple unmanned aerial vehicles in national air space. J. Dyn. Syst. Meas. Control 2019, 141, 071014. [Google Scholar] [CrossRef]
- Sunberg, Z.N.; Kochenderfer, M.J.; Pavone, M. Optimized and trusted collision avoidance for unmanned aerial vehicles using approximate dynamic programming. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: New York, NY, USA, 2016; pp. 1455–1461. [Google Scholar]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Hao, G.; Lv, Q.; Huang, Z.; Zhao, H.; Chen, W. UAV Path Planning Based on Improved Artificial Potential Field Method. Aerospace 2023, 10, 562. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Y. A virtual-waypoint based artificial potential field method for UAV path planning. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; IEEE: New York, NY, USA, 2016; pp. 949–953. [Google Scholar]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1129–1133. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Best, A.; Narang, S.; Manocha, D. Real-time reciprocal collision avoidance with elliptical agents. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: New York, NY, USA, 2016; pp. 298–305. [Google Scholar]
- Guo, H.; Guo, X. Local path planning algorithm for UAV based on improved velocity obstacle method. Hangkong Xuebao/Acta Aeronaut. et Astronaut. Sin. 2023, 44, 327586. [Google Scholar]
- Bi, K.; Wu, M.; Zhang, W.; Wen, X.; Du, K. Modeling and analysis of flight conflict network based on velocity obstacle method. Xi Tong Gong Cheng Yu Dian Zi Ji Shu/Syst. Eng. Electron. 2021, 43, 2163–2173. [Google Scholar]
- Zhang, H.; Gan, X.; Li, A.; Gao, Z.; Xu, X. UAV obstacle avoidance and track recovery strategy based on velocity obstacle method. Xi Tong Gong Cheng Yu Dian Zi Ji Shu/Syst. Eng. Electron. 2020, 42, 1759–1767. [Google Scholar]
- Yang, W.; Wen, X.; Wu, M.; Bi, K.; Yue, L. Three-Dimensional Conflict Resolution Strategy Based on Network Cooperative Game. Symmetry 2022, 14, 1517. [Google Scholar] [CrossRef]
- Peng, M.; Meng, W. Cooperative obstacle avoidance for multiple UAVs using spline_VO method. Sensors 2022, 22, 1947. [Google Scholar] [CrossRef]
- Adouane, L.; Benzerrouk, A.; Martinet, P. Mobile robot navigation in cluttered environment using reactive elliptic trajectories. IFAC Proc. Vol. 2011, 44, 13801–13806. [Google Scholar] [CrossRef]
- Braquet, M.; Bakolas, E. Vector field-based collision avoidance for moving obstacles with time-varying elliptical shape. IFAC-PapersOnLine 2022, 55, 587–592. [Google Scholar] [CrossRef]
- Gérin-Lajoie, M.; Richards, C.L.; McFadyen, B.J. The negotiation of stationary and moving obstructions during walking: Anticipatory locomotor adaptations and preservation of personal space. Mot. Control 2005, 9, 242–269. [Google Scholar] [CrossRef]
- Chraibi, M.; Seyfried, A.; Schadschneider, A. Generalized centrifugal-force model for pedestrian dynamics. Phys. Rev. E 2010, 82, 046111. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.H.; Jeon, J.D.; Oh, J.H. Velocity obstacle based local collision avoidance for a holonomic elliptic robot. Auton. Robot. 2017, 41, 1347–1363. [Google Scholar] [CrossRef]
- Wang, G.; Liu, M.; Wang, F.; Chen, Y. A novel and elliptical lattice design of flocking control for multi-agent ground vehicles. IEEE Control Syst. Lett. 2022, 7, 1159–1164. [Google Scholar] [CrossRef]
- Du, Z.; Li, W.; Shi, G. Multi-USV Collaborative Obstacle Avoidance Based on Improved Velocity Obstacle Method. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2024, 10, 04023049. [Google Scholar] [CrossRef]
- Mao, S.; Yang, P.; Gao, D.; Bao, C.; Wang, Z. A Motion Planning Method for Unmanned Surface Vehicle Based on Improved RRT Algorithm. J. Mar. Sci. Eng. 2023, 11, 687. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment. Ocean Eng. 2015, 97, 126–144. [Google Scholar] [CrossRef]
- Munasinghe, S.R.; Oh, C.; Lee, J.J.; Khatib, O. Obstacle avoidance using velocity dipole field method. In Proceedings of the International Conference on Control, Automation, and Systems, ICCAS, Budapest, Hungary, 26–29 June 2005; pp. 1657–1661. [Google Scholar]
- Abdallaoui, S.; Aglzim, E.H.; Kribeche, A.; Ikaouassen, H.; Chaibet, A.; Abid, S.E. Dynamic and Static Obstacles Avoidance Strategies Using Parallel Elliptic Limit-Cycle Approach for Autonomous Robots. In Proceedings of the 2023 11th International Conference on Control, Mechatronics and Automation (ICCMA), Agder, Norway, 1–3 November 2023; IEEE: New York, NY, USA, 2023; pp. 133–138. [Google Scholar]
- Shiller, Z.; Large, F.; Sekhavat, S. Motion planning in dynamic environments: Obstacles moving along arbitrary trajectories. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; IEEE: New York, NY, USA, 2001; Volume 4, pp. 3716–3721. [Google Scholar]
- Large, F.; Laugier, C.; Shiller, Z. Navigation among moving obstacles using the NLVO: Principles and applications to intelligent vehicles. Auton. Robot. 2005, 19, 159–171. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Mou, J.; Van Gelder, P. Ship collision candidate detection method: A velocity obstacle approach. Ocean Eng. 2018, 170, 186–198. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection. Ocean Eng. 2020, 196, 106718. [Google Scholar] [CrossRef]
- Van den Berg, J.; Lin, M.; Manocha, D. Reciprocal velocity obstacles for real-time multi-agent navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: New York, NY, USA, 2008; pp. 1928–1935. [Google Scholar]
- Van Den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal n-body collision avoidance. In Robotics Research: The 14th International Symposium ISRR; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–19. [Google Scholar]
- Han, R.; Chen, S.; Wang, S.; Zhang, Z.; Gao, R.; Hao, Q.; Pan, J. Reinforcement learned distributed multi-robot navigation with reciprocal velocity obstacle shaped rewards. IEEE Robot. Autom. Lett. 2022, 7, 5896–5903. [Google Scholar] [CrossRef]
- Giese, A.; Latypov, D.; Amato, N.M. Reciprocally-rotating velocity obstacles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: New York, NY, USA, 2014; pp. 3234–3241. [Google Scholar]
- JEON, J.D. A Velocity-Based Local Navigation Approach to Collision Avoidance of Elliptic Robots. Ph.D. Thesis, Seoul National University, Seoul, Republic of Korea, 2017. [Google Scholar]
- Feurtey, F. Simulating the Collision Avoidance Behavior of Pedestrians; The University of Tokyo, School of Engineering, Department of Electronic Engineering: Tokyo, Japan, 2000. [Google Scholar]
- Snape, J.; Van Den Berg, J.; Guy, S.J.; Manocha, D. The hybrid reciprocal velocity obstacle. IEEE Trans. Robot. 2011, 27, 696–706. [Google Scholar] [CrossRef]
- Snape, J.; Van Den Berg, J.; Guy, S.J.; Manocha, D. Independent navigation of multiple mobile robots with hybrid reciprocal velocity obstacles. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; IEEE: New York, NY, USA, 2009; pp. 5917–5922. [Google Scholar]
- Kavraki, L.E. Computation of configuration-space obstacles using the fast Fourier transform. IEEE Trans. Robot. Autom. 1995, 11, 408–413. [Google Scholar] [CrossRef]
- Lee, I.K.; Kim, M.S.; Elber, G. Polynomial/rational approximation of Minkowski sum boundary curves. Graph. Model. Image Process. 1998, 60, 136–165. [Google Scholar] [CrossRef]
- Wein, R. Exact and efficient construction of planar Minkowski sums using the convolution method. In European Symposium on Algorithms; Springer: Berlin/Heidelberg, Germany, 2006; pp. 829–840. [Google Scholar]
- Yan, Y.; Chirikjian, G.S. Closed-form characterization of the Minkowski sum and difference of two ellipsoids. Geom. Dedicata 2015, 177, 103–128. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, P.; Mou, J.; Chen, L. Multi-ship Encounter Situation Analysis with the Integration of Elliptical Ship Domains and Velocity Obstacles. TransNav. Int. J. Mar. Navig. Saf. Od Sea Transp. 2023, 17, 895–902. [Google Scholar] [CrossRef]
- Abichandani, P.; Lobo, D.; Muralidharan, M.; Runk, N.; McIntyre, W.; Bucci, D.; Benson, H. Distributed Motion Planning for Multiple Quadrotors in Presence of Wind Gusts. Drones 2023, 7, 58. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A.; Chu, T.; Sekharan, C.N.; Starek, M.J. Modeling Wind and Obstacle Disturbances for Effective Performance Observations and Analysis of Resilience in UAV Swarms. Aerospace 2024, 11, 237. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Indicators | Implication |
|---|---|
| Process Indicators | Indicators of Changes over Time with the Flight Process |
| VO space | VO in elliptic domains or circular domains |
| Flight distance | Distance between UAVs during flight |
| Occupied area | AVO-occupied area in 2D space |
| Angle of velocity direction | Change in velocity direction throughout the flight of the UAVs |
| Detour distance | Detour distance in compared to the original flight direction |
| Overall Indicators | Indicators for the Entire Flight |
| Total detour distance | Detour distance + remaining distance |
| Single obstacle avoidance time | Average time per calculation of obstacle avoidance direction for UAV-A |
| Parameters of UAV | UAV | v | o | |||||
|---|---|---|---|---|---|---|---|---|
| Scenario 1 | A | 20 | 0 | 0 | 0.2 | |||
| B | 20 | 0.2 | ||||||
| Scenario 2 | A | 20 | 0 | 0 | 0.2 | |||
| B | 20 | 0.2 |
| Pre-Set Scenario | Domain Hypothesis | Total Detour Distanc (m) | Single Obstacle Avoidance Time (s) | Velocity Reback Moment (s) |
|---|---|---|---|---|
| Scenario 1 | Elliptic domain | 54.37 | 0.0016 | |
| Circle domain | 69.29 | 0.00056 | ||
| Scenario 2 | Elliptic domain | 44.96 | 0.0043 | |
| Circle domain | 56.65 | 0.0014 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, Y.; Wu, Y.; Zhao, S.; Zhang, D. Unmanned Aerial Vehicle Obstacle Avoidance Based Custom Elliptic Domain. Drones 2024, 8, 397. https://doi.org/10.3390/drones8080397
Liao Y, Wu Y, Zhao S, Zhang D. Unmanned Aerial Vehicle Obstacle Avoidance Based Custom Elliptic Domain. Drones. 2024; 8(8):397. https://doi.org/10.3390/drones8080397
Chicago/Turabian StyleLiao, Yong, Yuxin Wu, Shichang Zhao, and Dan Zhang. 2024. "Unmanned Aerial Vehicle Obstacle Avoidance Based Custom Elliptic Domain" Drones 8, no. 8: 397. https://doi.org/10.3390/drones8080397
APA StyleLiao, Y., Wu, Y., Zhao, S., & Zhang, D. (2024). Unmanned Aerial Vehicle Obstacle Avoidance Based Custom Elliptic Domain. Drones, 8(8), 397. https://doi.org/10.3390/drones8080397